Development of a Wearable Sensor Algorithm to Detect the Quantity and Kinematic Characteristics of Infant Arm Movement Bouts Produced across a Full Day in the Natural Environment

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Procedures
2.3. Algorithm Development
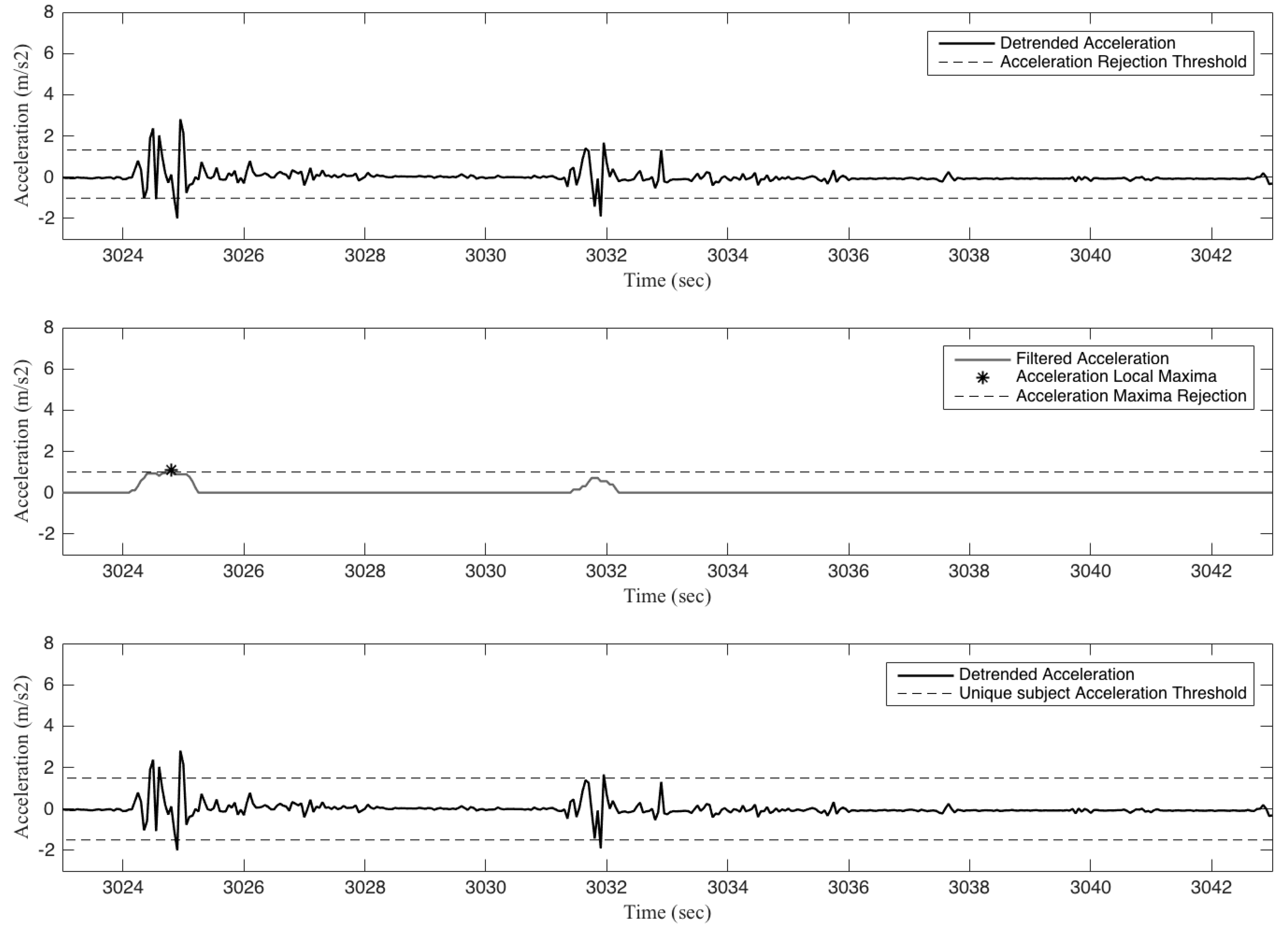
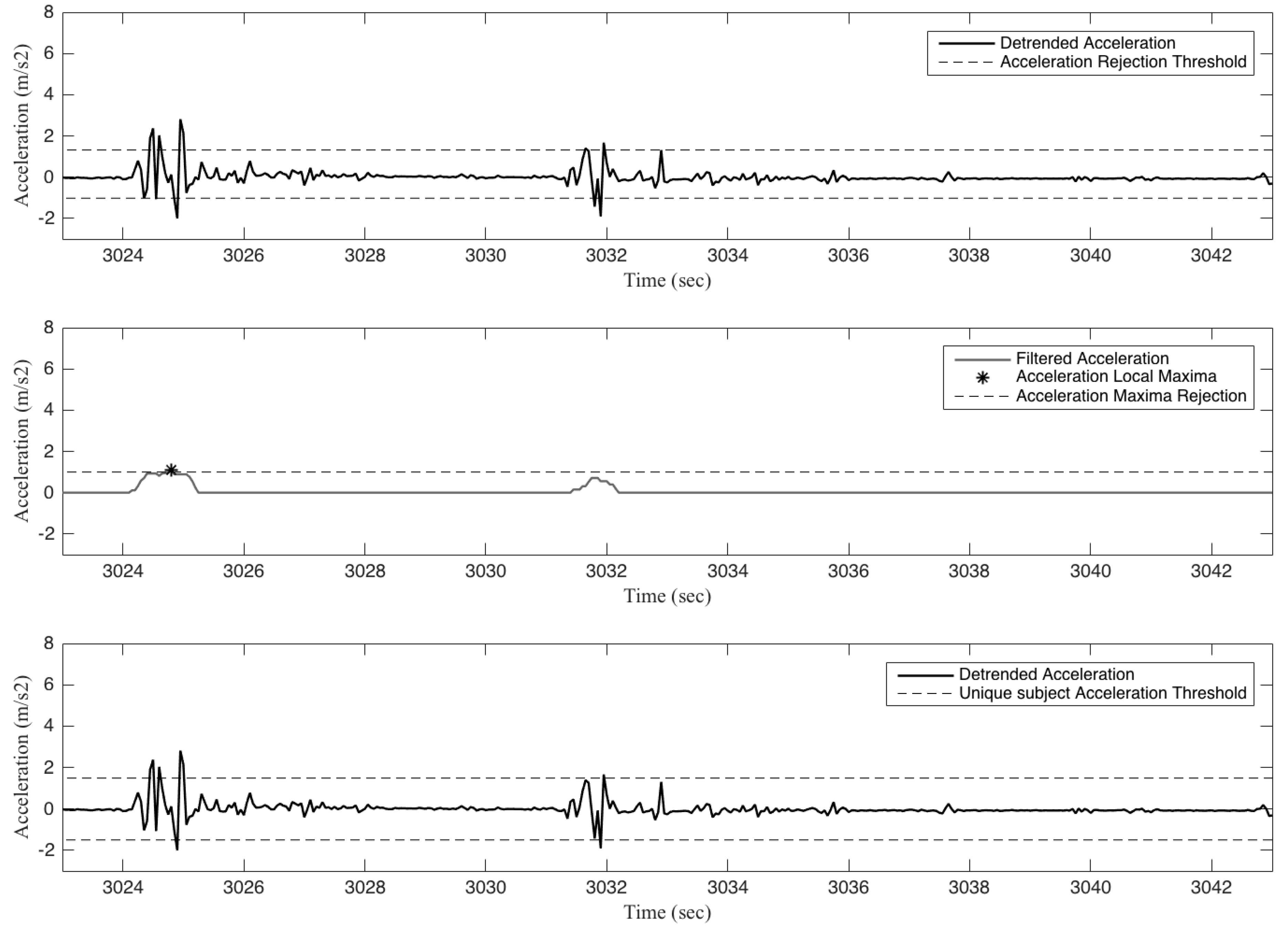
2.4. Acceleration Rejection Threshold Determination. Detrending and Rectification
2.5. Filtering and Threshold Determination
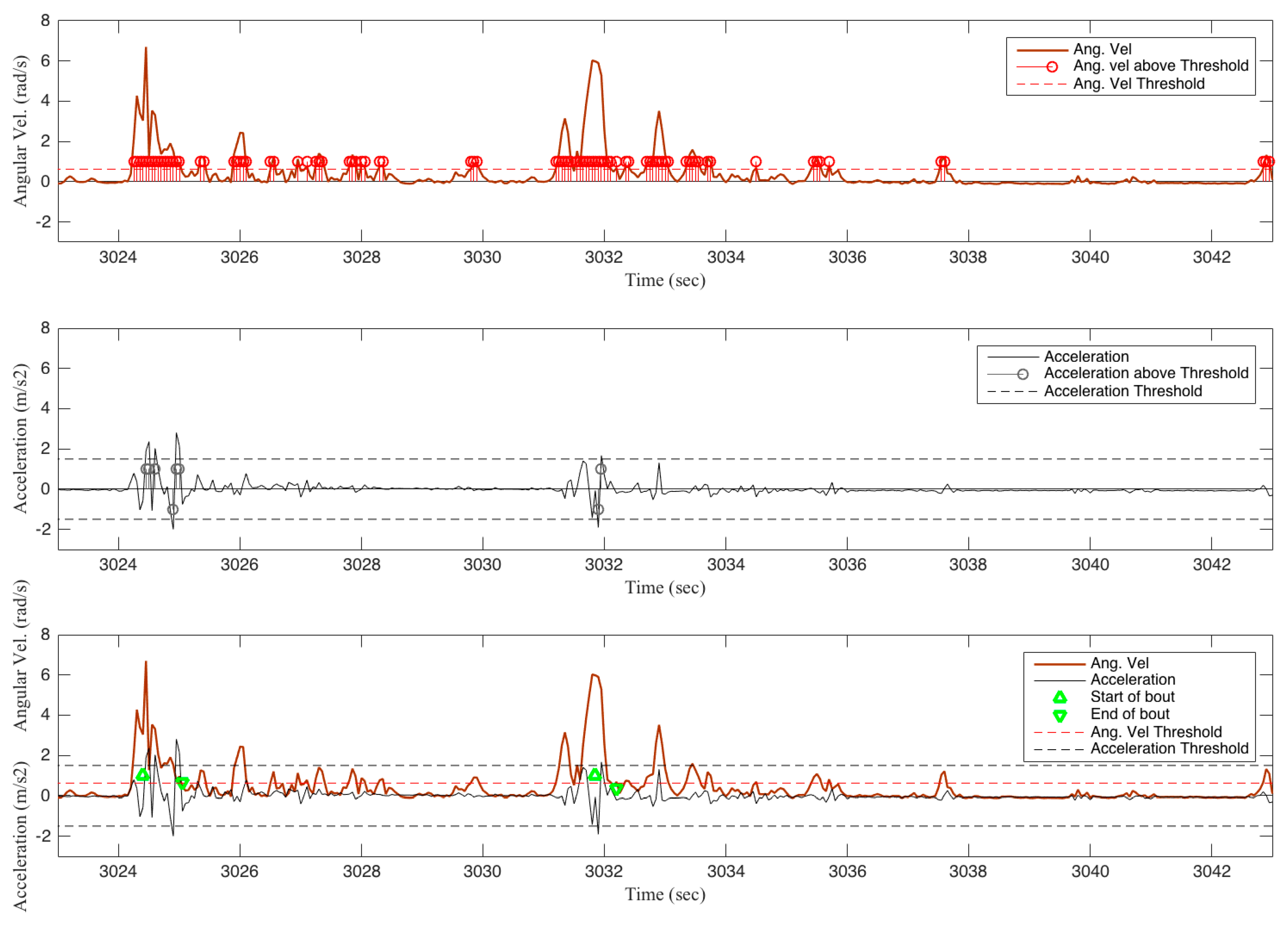
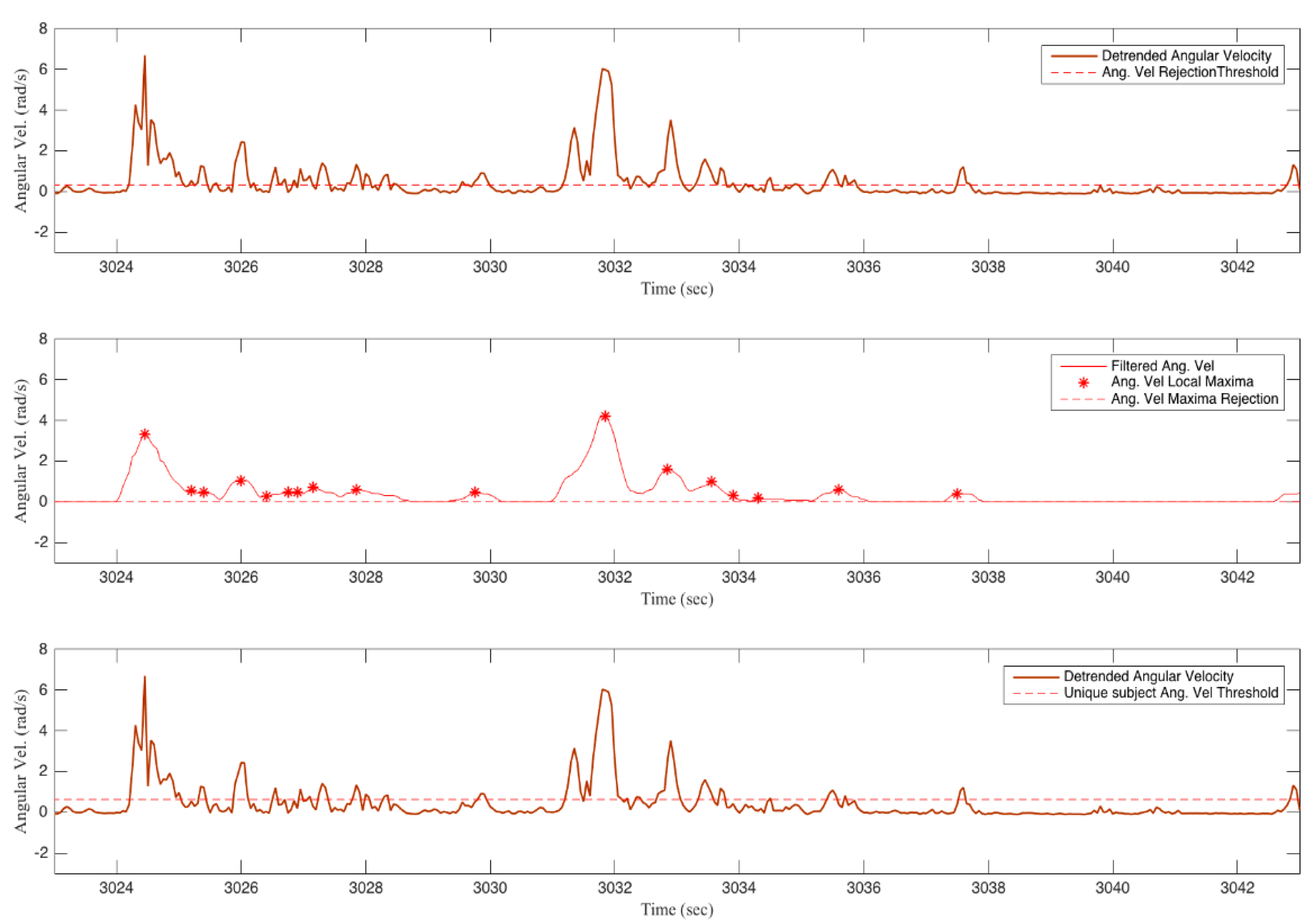
2.6. Angular Velocity Rejection Threshold Determination. Detrending and Rectification
2.7. Filtering and Bout Threshold Determination
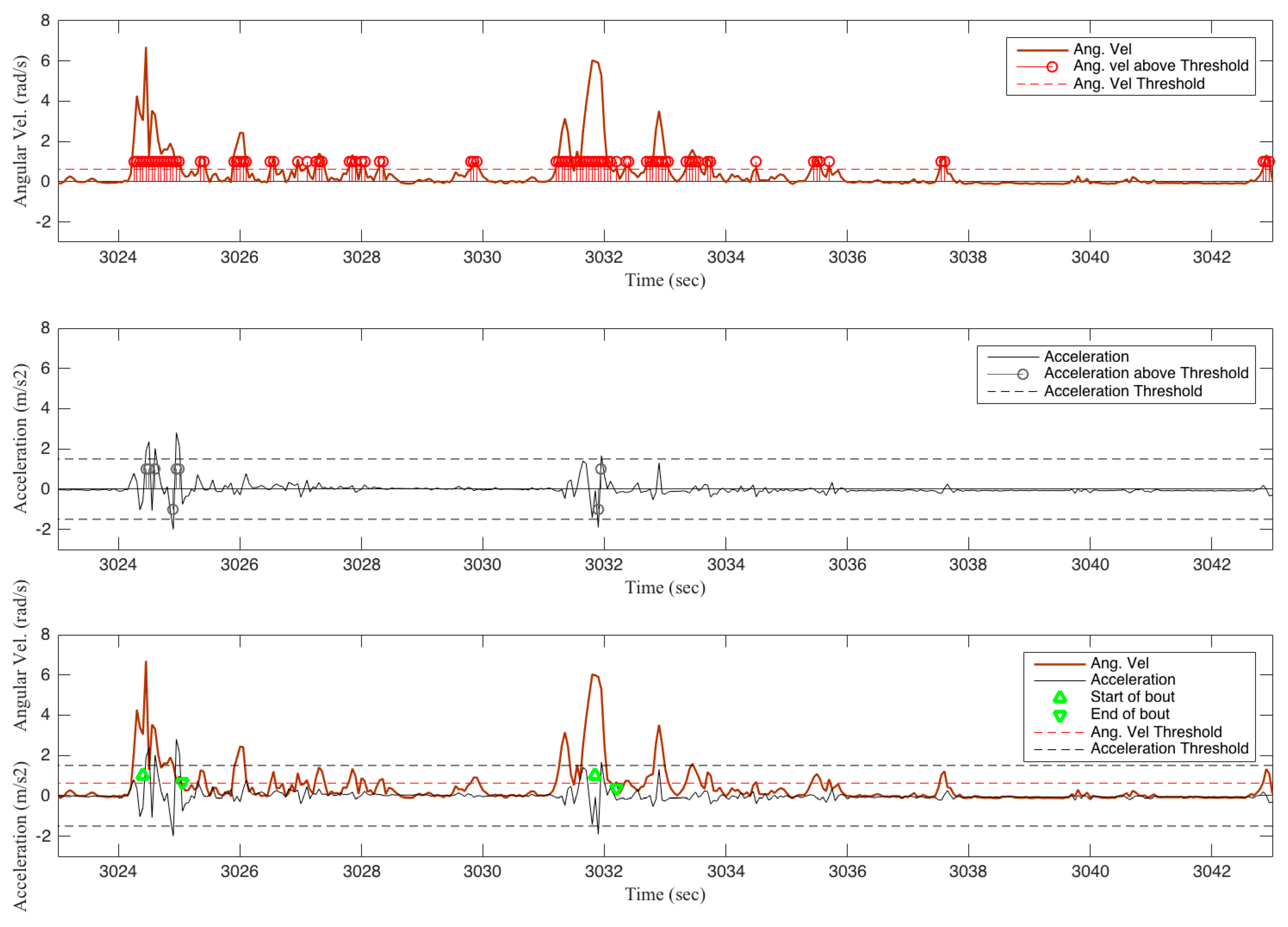
2.8. Arm Movement Bout Detection
2.9. Algorithm Performance: Counting Number of Bouts of Arm Movement
2.10. Type of Movement
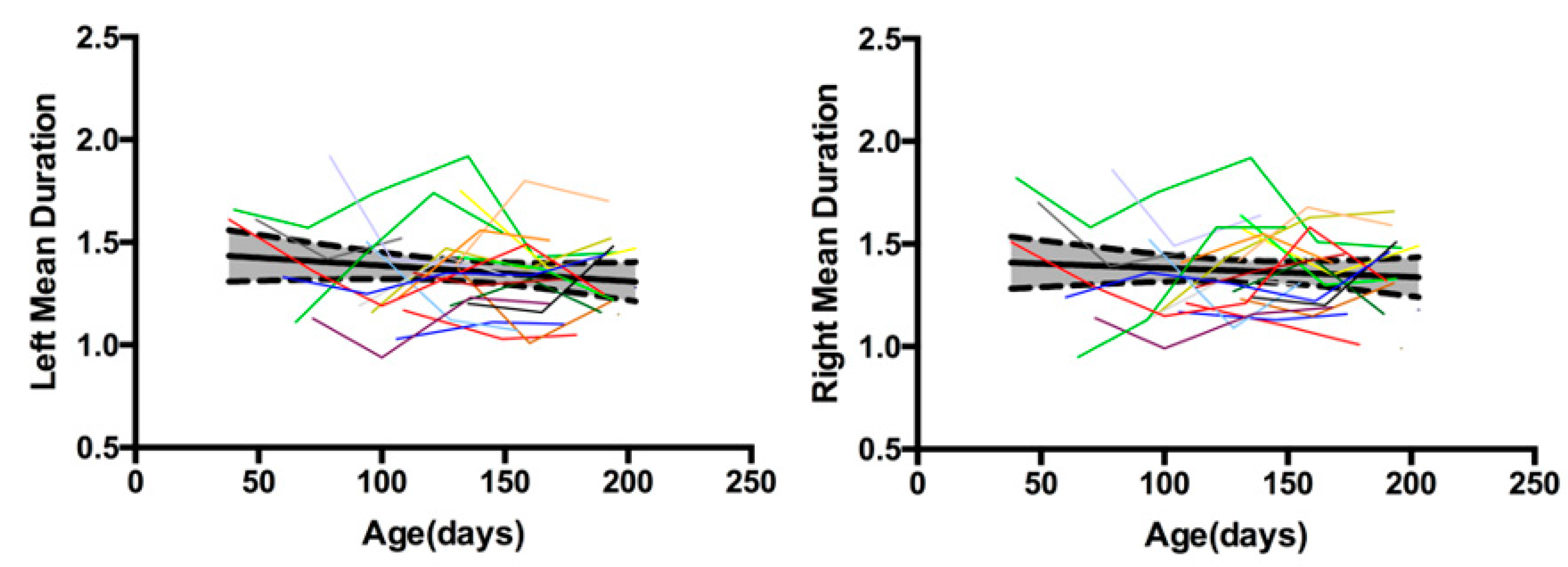
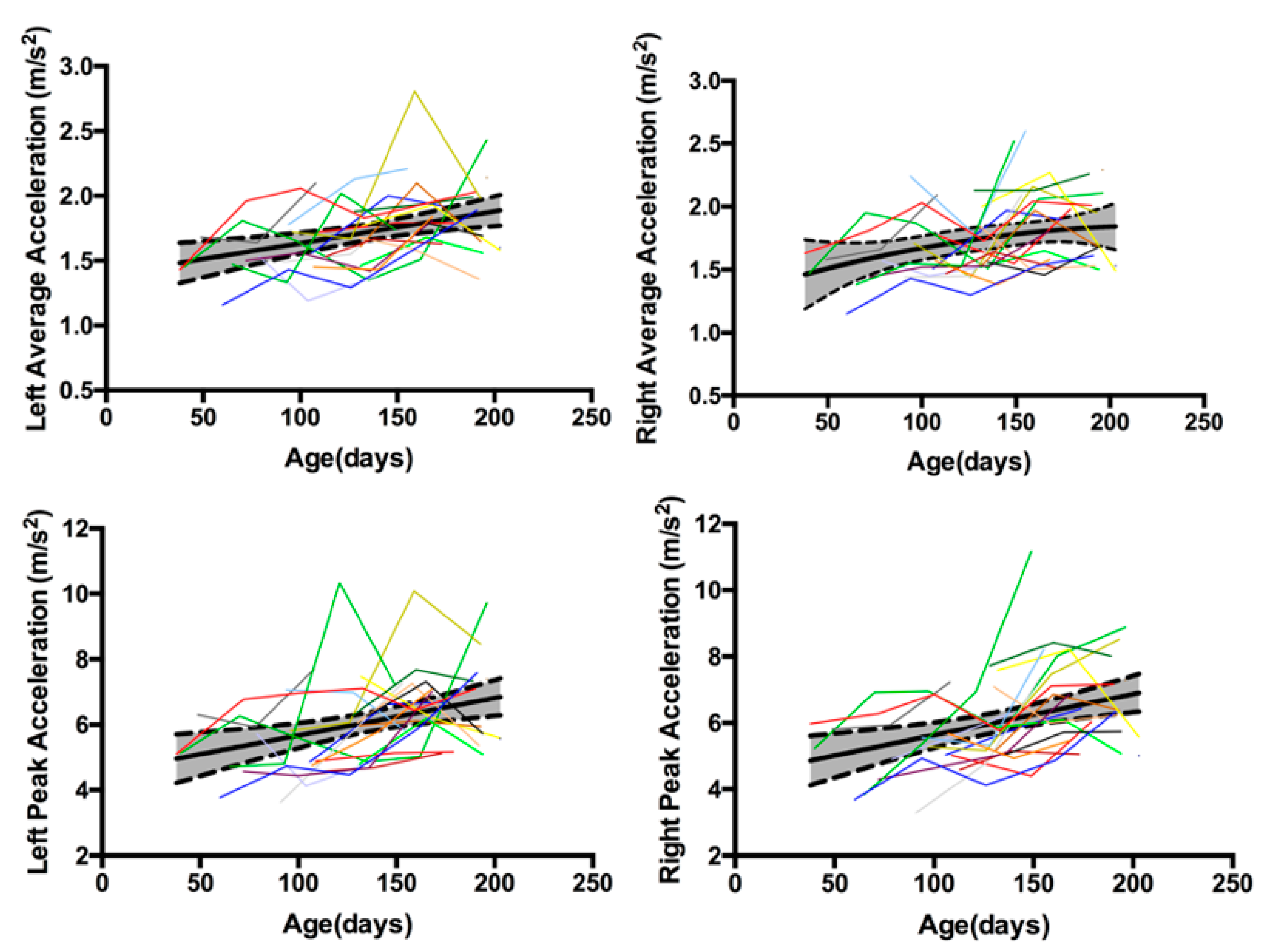
2.11. Kinematic Characteristics
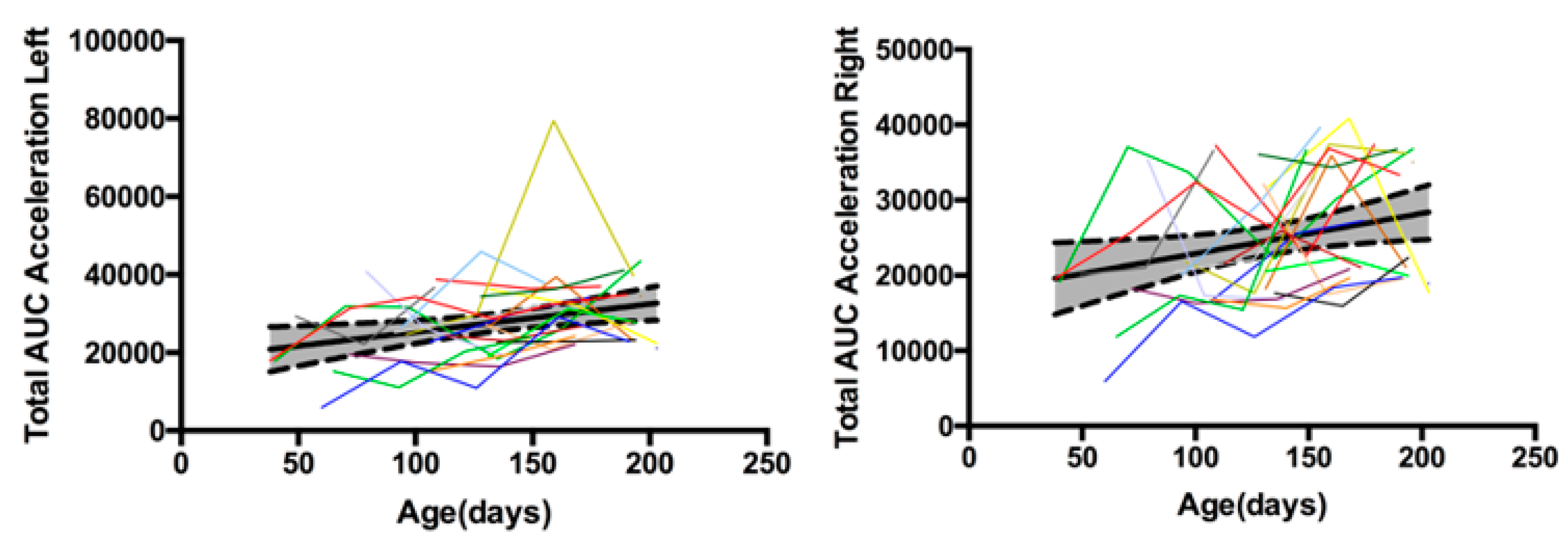
2.12. Acceleration Area
2.13. Statistical Analyses
3. Results
3.1. Algorithm Performance
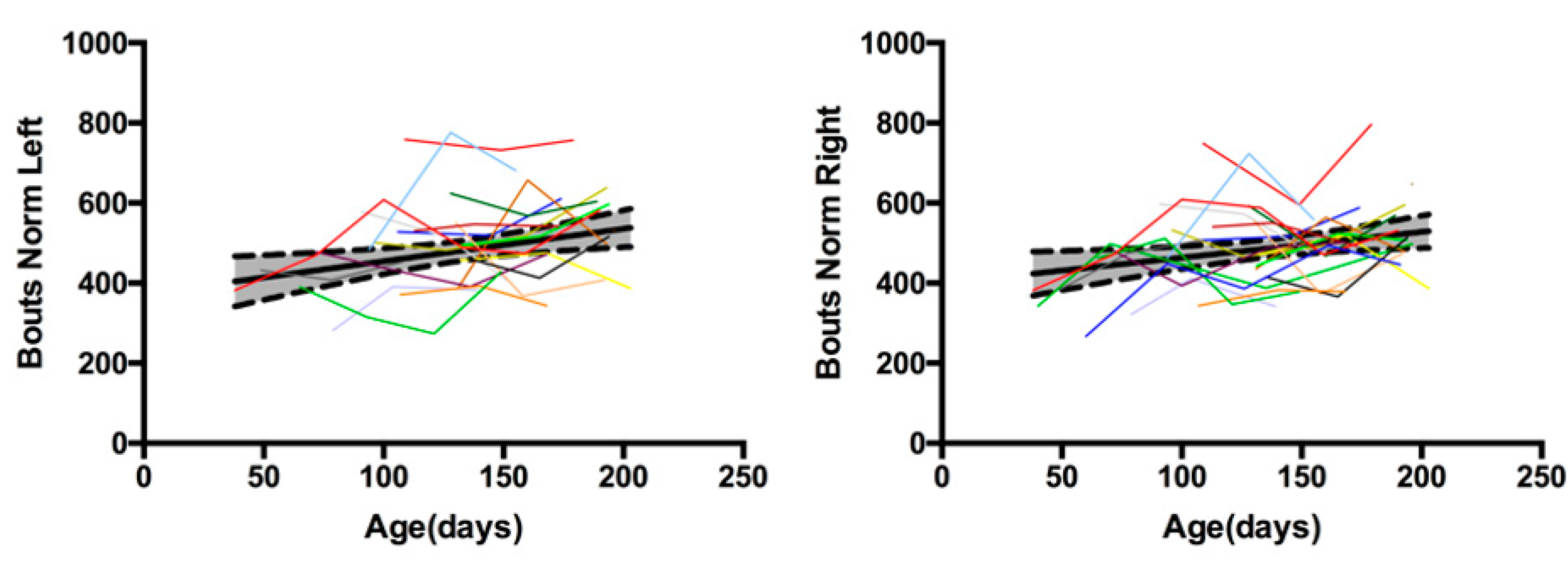
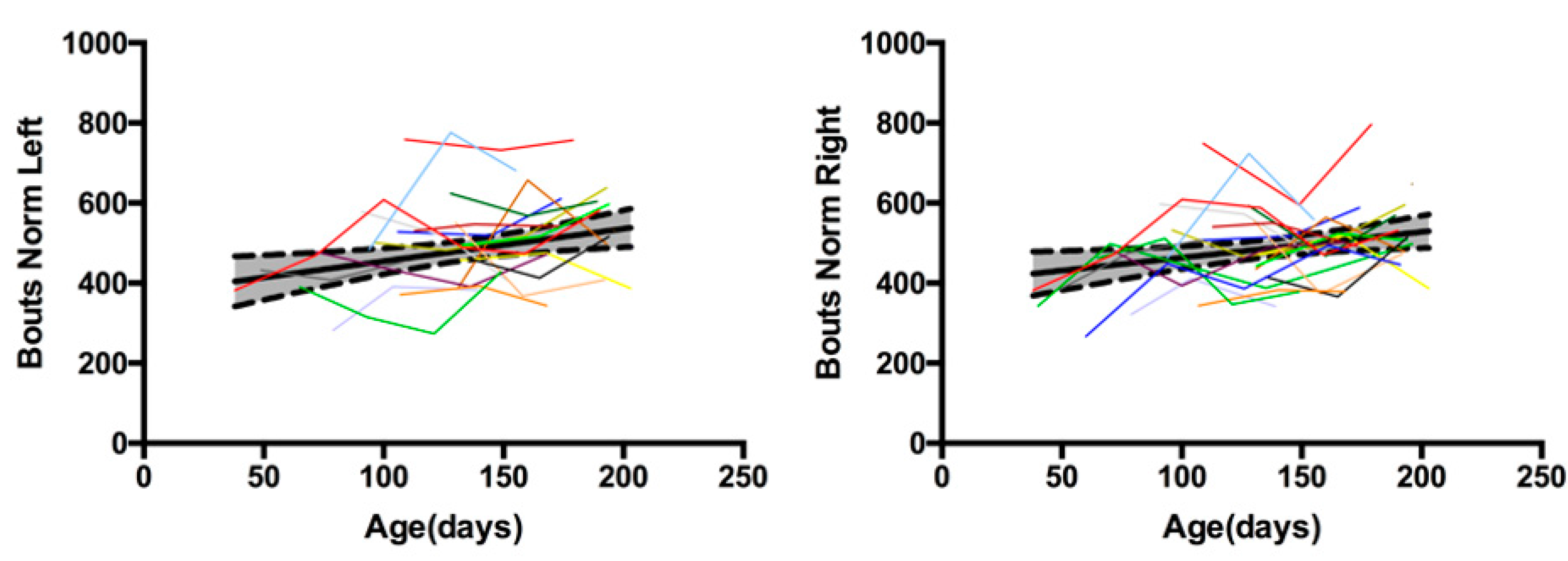
3.2. Number of Bouts
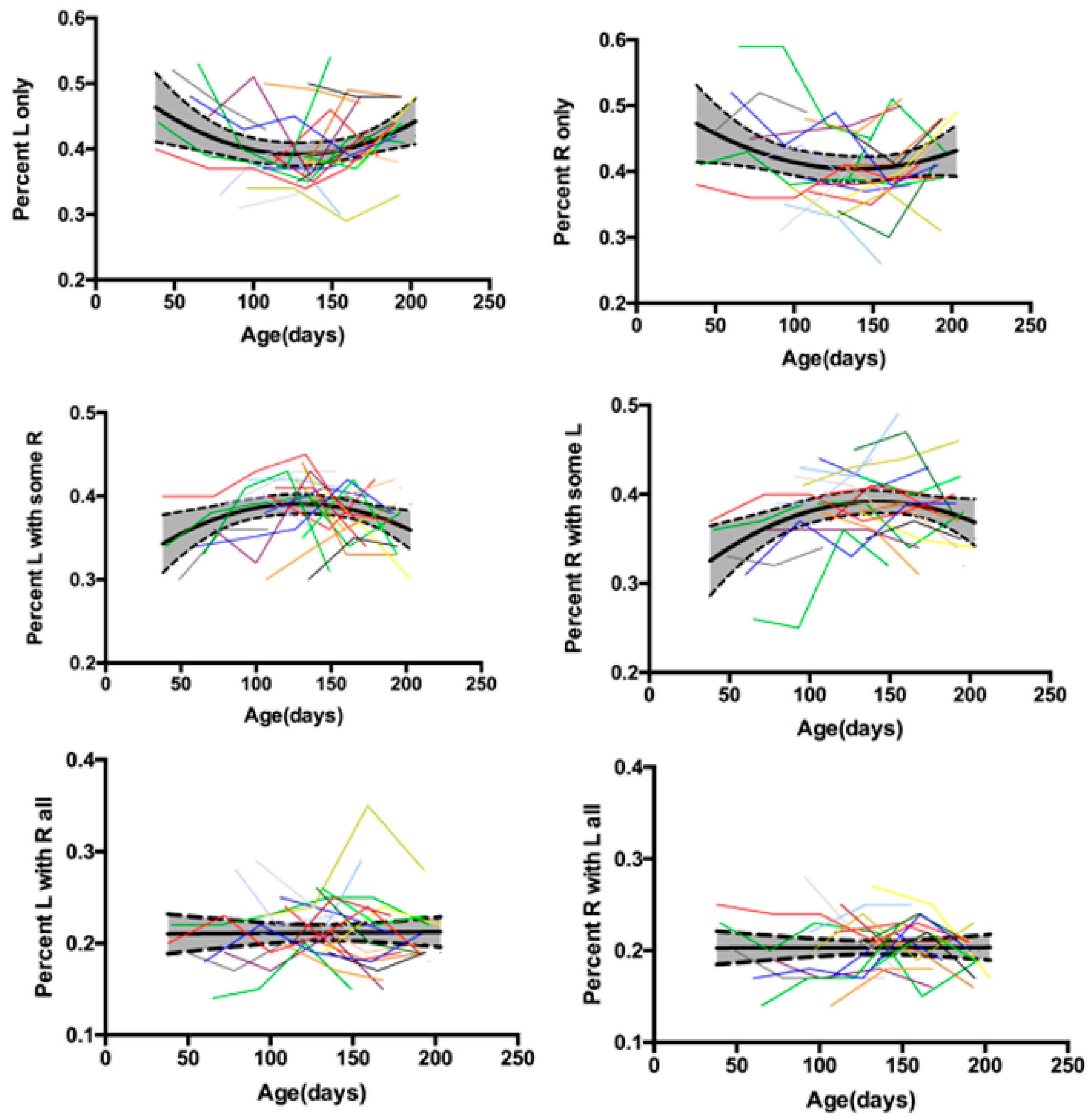
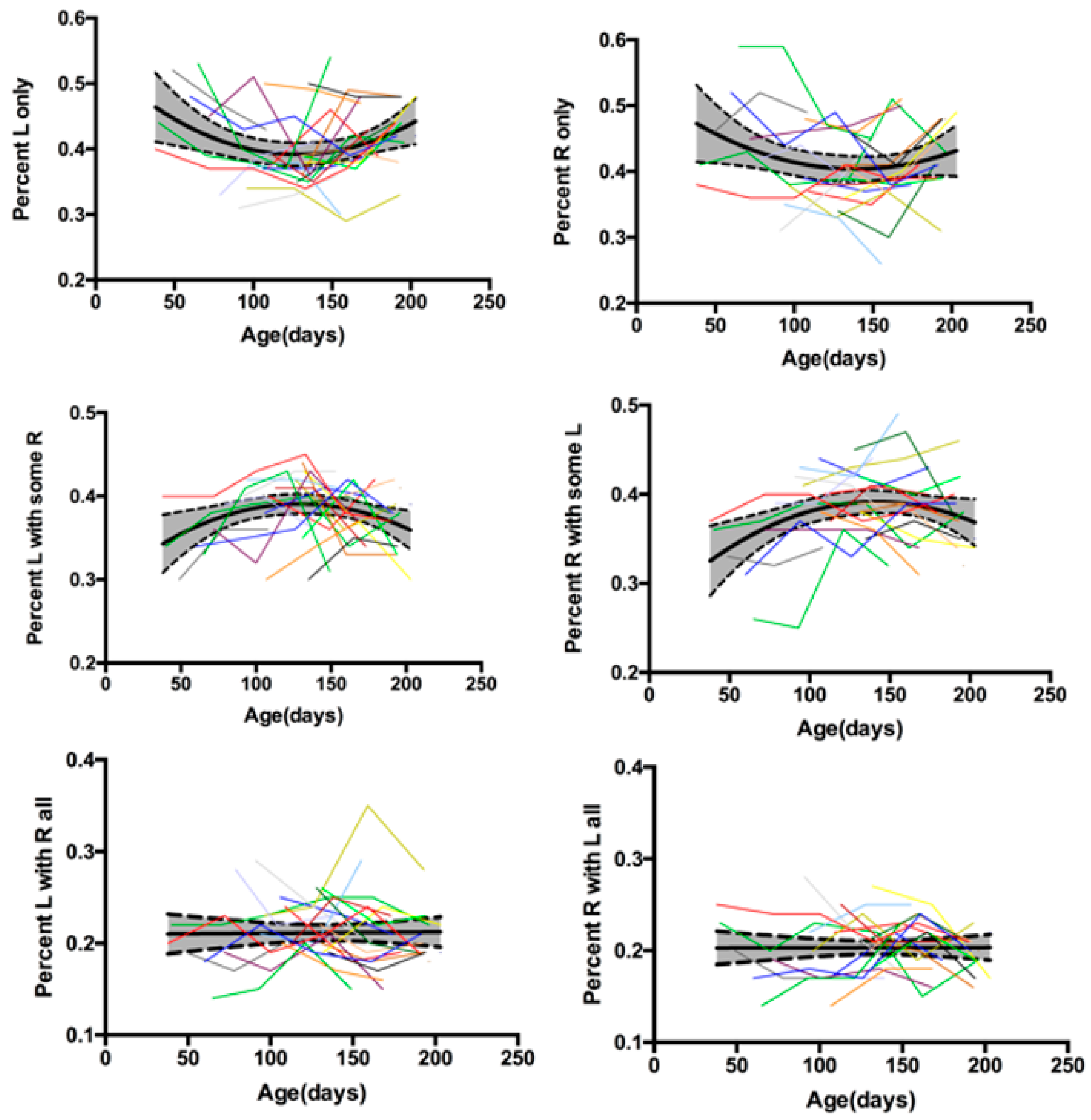
3.3. Type of Movement
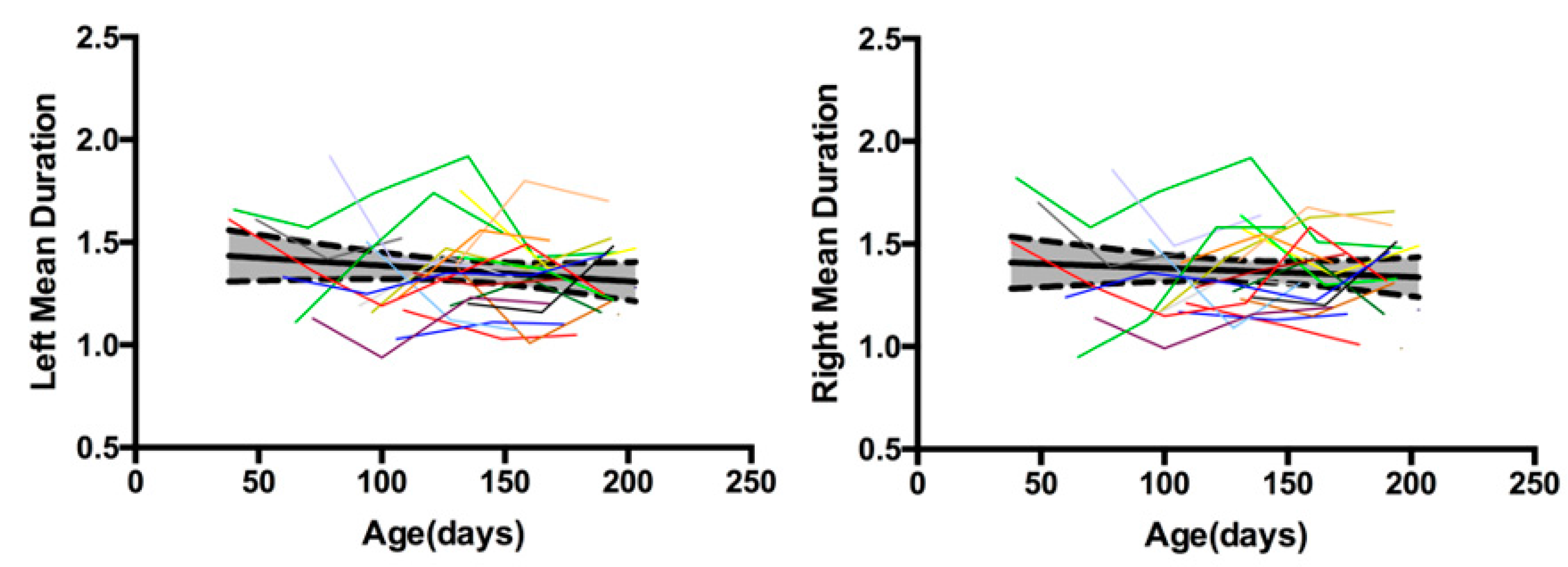
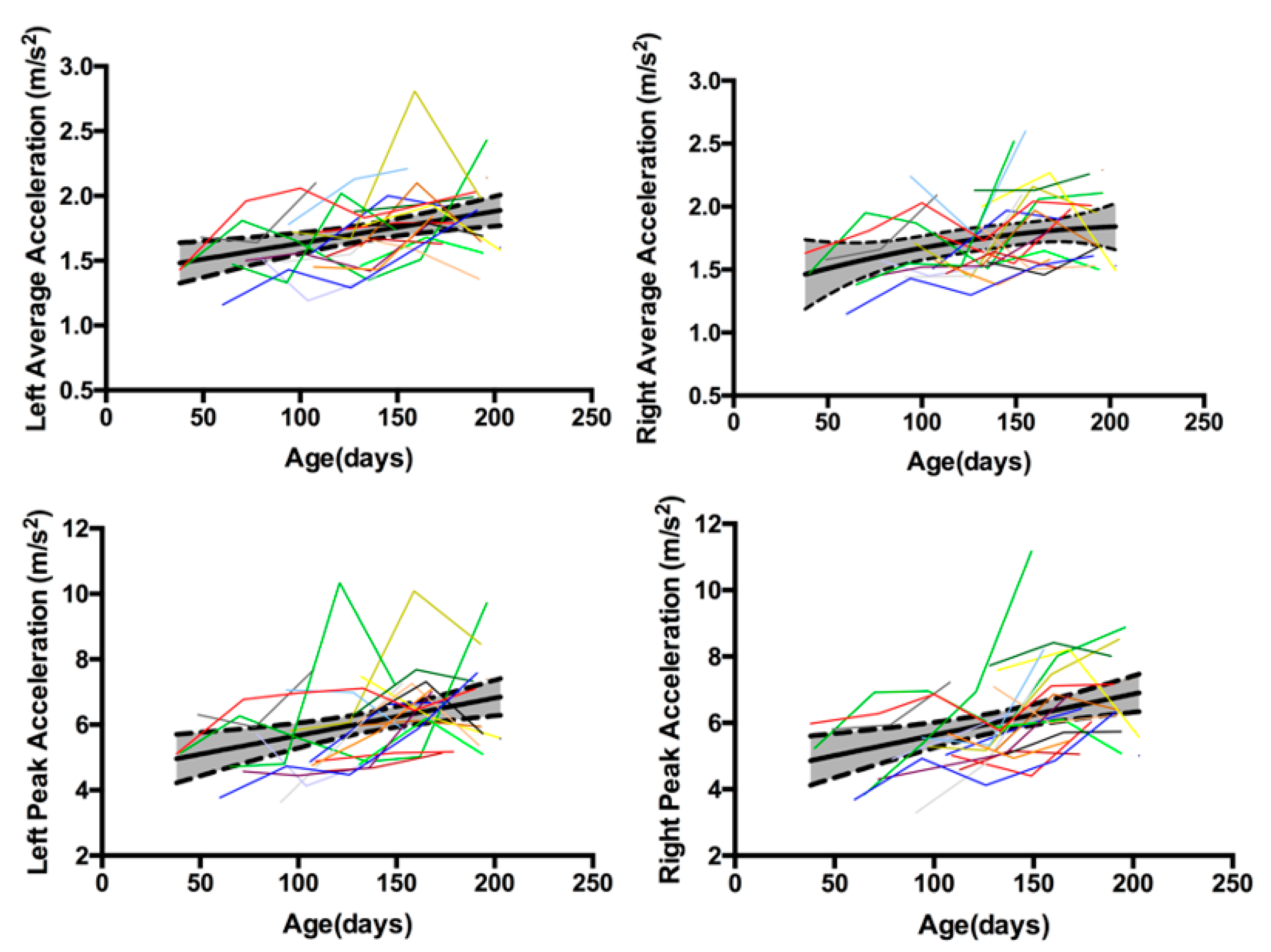
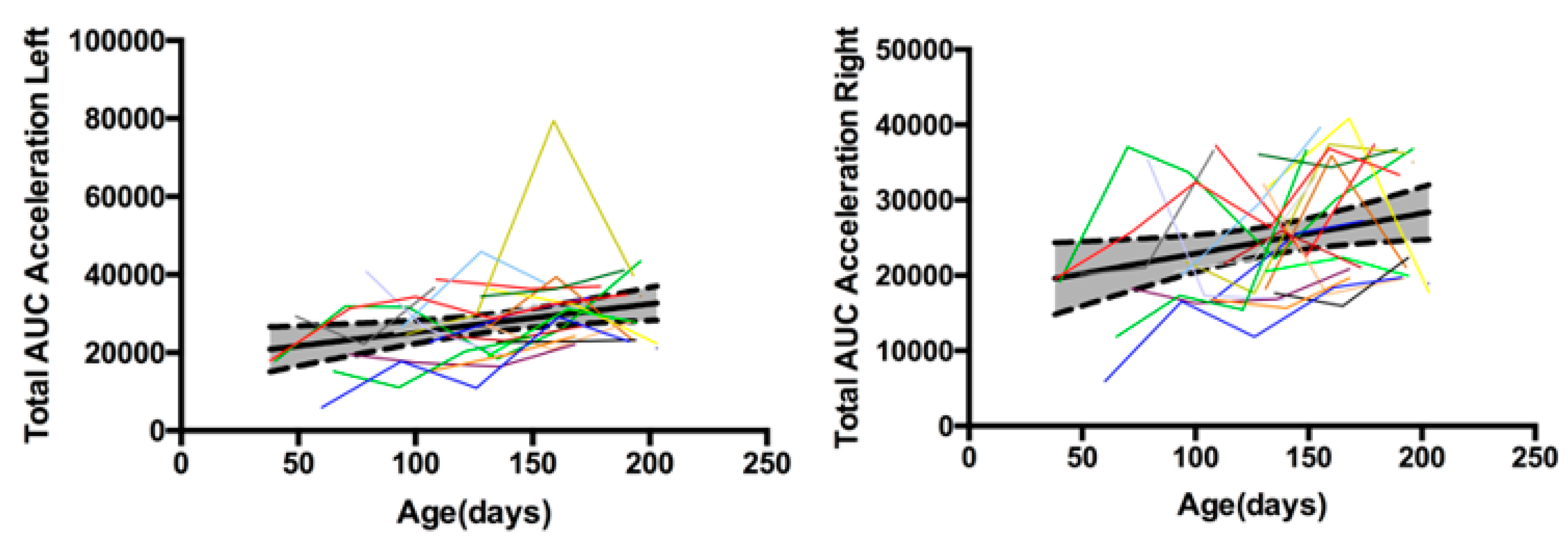
3.4. Kinematic Characteristics
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hebb, D.O. The Organization of Behavior: A Neuropsychological Theory, 1st ed.; Wiley: New York, NY, USA, 1949. [Google Scholar]
- Libertus, K.; Needham, A. Teach to reach: The effects of active vs. passive reaching experiences on action and perception. Vis. Res. 2010, 50, 2750–2757. [Google Scholar] [CrossRef] [PubMed]
- Umansky, R. The hand sock, an artificial handicap to prehension in infancy, and its relation to clinical disuse phenomena. Pediatrics 1973, 52, 546–555. [Google Scholar] [PubMed]
- Kermoian, R.; Campos, J.J. Locomotor experience: A facilitator of spatial cognitive development. Child Dev. 1988, 59, 908–917. [Google Scholar] [CrossRef] [PubMed]
- Schwarzer, G.; Freitag, C.; Buckel, R.; Lofruthe, A. Crawling is associated with mental rotation ability by 9-month-old infants. Infancy 2012, 18, 432–441. [Google Scholar] [CrossRef]
- Oudgenoeg-Paz, O.; Volman, M.C.J.M.; Leseman, P.P.M. Attainment of sitting and walking predicts development of productive vocabulary between ages 16 and 28 months. Infant Behav. Dev. 2012, 35, 733–736. [Google Scholar] [CrossRef] [PubMed]
- Singh, M.; Patterson, D.J. Involuntary gesture recognition for predicting cerebral palsy in high-risk infants. In Proceedings of the 2010 International Symposium on Wearable Computers (ISWC), Seoul, Korea, 10–13 October 2010; pp. 1–8. [Google Scholar]
- Gravem, D.; Singh, M.; Chen, C.; Rich, J.; Vaughan, J.; Goldberg, K.; Waffarn, F.; Chou, P.; Cooper, D.; Reinkensmeyer, D.; et al. Assessment of Infant Movement with a Compact Wireless Accelerometer System. J. Med. Devices 2012, 6, 021013. [Google Scholar] [CrossRef]
- Marcroft, C.; Khan, A.; Embleton, N.D.; Trenell, M.; Plötz, T. Movement recognition technology as a method of assessing spontaneous general movements in high risk infants. Front. Neurol. 2015, 5, 284. [Google Scholar] [CrossRef] [PubMed]
- Heinze, F.; Hesels, K.; Breitbach-Faller, N.; Schmitz-Rode, T.; Disselhorst-Klug, C. Movement analysis by accelerometry of newborns and infants for the early detection of movement disorders due to infantile cerebral palsy. Med. Biol. Eng. Comput. 2010, 48, 765–772. [Google Scholar] [CrossRef] [PubMed]
- Waldmeier, S.; Grunt, S.; Delgado-Eckert, E.; Latzin, P.; Steinlin, M.; Fuhrer, K.; Frey, U. Correlation properties of spontaneous motor activity in healthy infants: A new computer-assisted method to evaluate neurological maturation. Exp. Brain Res. 2013, 227, 433–446. [Google Scholar] [CrossRef] [PubMed]
- Ohgi, S.; Morita, S.; Loo, K.K.; Mizuike, C. Time Series Analysis of Spontaneous Upper-Extremity Movements of Premature Infants with Brain Injuries. Phys. Ther. 2008, 88, 1022–1033. [Google Scholar] [CrossRef] [PubMed]
- Gima, H.; Ohgi, S.; Morita, S.; Karasuno, H.; Fujiwara, T.; Abe, K. A Dynamical System Analysis of the Development of Spontaneous Lower Extremity Movements in Newborn and Young Infants. J. Physiol. Anthropol. 2011, 30, 179–186. [Google Scholar] [CrossRef] [PubMed]
- Activity Monitor Comparison | ActiGraph. Available online: actigraphcorp.com/products-showcase/activity-monitors/product-comparison/ (accessed on 24 July 2016).
- Actical Specifications. Available online: http://www.actigraphy.com/solutions/actical/specifications.html (accessed on 22 July 2017).
- Bayley, N. Bayley Scales of Infant Development, 3rd ed.; Pearson: San Antonio, TX, USA, 2005. [Google Scholar]
- California Department of Health Care Services. Available online: http://www.dhcs.ca.gov/services/ccs/Pages/HRIF.aspx#medicalcriteria (accessed on 20 May 2017).
- Piper, M.C.; Darrah, J. Motor Assessment of the Developing Infant; WB Saunders: Philadelphia, PA, USA, 1994. [Google Scholar]
- Adolph, K.E.; Robinson, S.R. Sampling Development. J. Cogn. Dev. 2011, 12, 411–423. [Google Scholar] [CrossRef] [PubMed]
- Cunha, A.B.; de Almeida Soares, D.; de Paula Carvalho, R.; Rosander, K.; von Hofsten, C.; Tudella, E. Maturational and situational determinants of reaching at its onset. Infant Behav. Dev. 2015, 41, 64–72. [Google Scholar] [CrossRef] [PubMed]
- Berthier, N.E.; Keen, R. Development of reaching in infancy. Exp. Brain Res. 2005, 169, 507–518. [Google Scholar] [CrossRef] [PubMed]
- Fallang, B.; Saugstad, O.D.; Grøgaard, J.; Hadders-Algra, M. Kinematic Quality of Reaching Movements in Preterm Infants. Pediatr. Res. 2003, 53, 836–842. [Google Scholar] [CrossRef] [PubMed]
- Fetters, L.; Todd, J. Quantitative Assessment of Infant Reaching Movements. J. Mot. Behav. 1987, 19, 147–166. [Google Scholar] [CrossRef] [PubMed]
- Rönnqvist, L.; Domellöf, E. Quantitative assessment of right and left reaching movements in infants: A longitudinal study from 6 to 36 months. Dev. Psychobiol. 2006, 48, 444–459. [Google Scholar] [CrossRef] [PubMed]
- Tronick, E.Z.; Fetters, L.; Olson, K.L.; Chen, Y. Similar and functionally typical kinematic reaching parameters in 7- and 15-month-old in utero cocaine-exposed and unexposed infants. Dev. Psychobiol. 2004, 44, 168–175. [Google Scholar] [CrossRef] [PubMed]
- Abney, D.H.; Warlaumont, A.S.; Haussman, A.; Ross, J.M.; Wallot, S. Using nonlinear methods to quantify changes in infant limb movements and vocalizations. Front. Psychol. 2014, 5, 771. [Google Scholar] [CrossRef] [PubMed]
- Corbetta, D.; Thelen, E. Lateral biases and fluctuations in infants’ spontaneous arm movements and reaching. Dev. Psychobiol. 1999, 34, 237–255. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infant | Visit | Age (Days) | Awake Time (Hours) | Acceleration Area Left | Acceleration Area Right | Total Bouts Left (Number) | Bout Type: Left Only (Number) | Bout Type: Left with Right for Portion of Bout (Number) | Bout Type: Left with Right for Entire Bout (Number) | Total Bouts Right (Number) | Bout Type: Right Only (Number) | Bout Type: Right with Left for Portion of Bout (Number) | Bout Type: Right with Left for Entire Bout (Number) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 60 | 9.3 | 55,715 | 55,419 | 2326 | 1126 | 790 | 410 | 2491 | 1288 | 781 | 422 |
| 2 | 94 | 6.1 | 109,295 | 101,822 | 2783 | 1195 | 987 | 601 | 2758 | 1216 | 1034 | 508 | |
| 3 | 126 | 9.3 | 102,163 | 110,379 | 3242 | 1443 | 1169 | 630 | 3591 | 1774 | 1201 | 616 | |
| 4 | 161 | 8.4 | 243,714 | 154,263 | 4019 | 1584 | 1695 | 740 | 4140 | 1568 | 1595 | 977 | |
| 5 | 191 | 9.0 | 204,974 | 176,775 | 4001 | 1662 | 1512 | 827 | 4002 | 1656 | 1555 | 791 | |
| 2 | 1 | 113 | 8.0 | 194,156 | 172,301 | 4224 | 1648 | 1750 | 826 | 4308 | 1654 | 1597 | 1057 |
| 2 | 138 | 7.2 | 164,813 | 185,299 | 3919 | 1358 | 1596 | 965 | 3939 | 1482 | 1617 | 840 | |
| 3 | 173 | 7.2 | 194,881 | 151,906 | 3904 | 1674 | 1314 | 916 | 3558 | 1389 | 1438 | 731 | |
| 3 | 1 | 128 | 8.6 | 296,547 | 310,820 | 5382 | 1887 | 2113 | 1382 | 5112 | 1753 | 2290 | 1069 |
| 2 | 160 | 8.2 | 296,786 | 280,371 | 4636 | 1870 | 1860 | 906 | 3820 | 1133 | 1778 | 909 | |
| 3 | 189 | 8.1 | 332,616 | 297,343 | 4885 | 2147 | 1832 | 906 | 4604 | 1866 | 1754 | 984 | |
| 4 | 1 | 130 | 8.0 | 216,062 | 255,311 | 4372 | 1712 | 1698 | 962 | 4410 | 1799 | 1726 | 885 |
| 2 | 158 | 5.9 | 122,224 | 102,956 | 2166 | 874 | 877 | 415 | 2196 | 811 | 858 | 527 | |
| 3 | 192 | 5.0 | 139,128 | 97,527 | 2030 | 775 | 857 | 398 | 2355 | 1066 | 803 | 486 | |
| 5 | 1 | 131 | 8.0 | 152,452 | 164,041 | 3944 | 1555 | 1379 | 1010 | 3537 | 1396 | 1490 | 651 |
| 2 | 165 | 5.9 | 184,351 | 132,371 | 3051 | 1114 | 1279 | 658 | 3099 | 1165 | 1242 | 692 | |
| 3 | 194 | 8.4 | 233,834 | 167,870 | 5020 | 2201 | 1666 | 1153 | 4266 | 1664 | 1802 | 800 | |
| 6 | 1 | 94 | 8.1 | 214,226 | 162,435 | 3917 | 1444 | 1632 | 841 | 3746 | 1314 | 1596 | 836 |
| 2 | 128 | 8.1 | 373,701 | 240,609 | 6320 | 2393 | 2674 | 1253 | 5902 | 1965 | 2483 | 1454 | |
| 3 | 155 | 8.7 | 329,202 | 344,689 | 5921 | 2740 | 1909 | 1272 | 4860 | 1874 | 2029 | 957 | |
| 7 | 1 | 79 | 6.4 | 259,136 | 224,860 | 1790 | 588 | 697 | 505 | 2050 | 868 | 805 | 377 |
| 2 | 104 | 5.5 | 145,214 | 95,116 | 2148 | 828 | 849 | 471 | 2260 | 986 | 886 | 388 | |
| 3 | 139 | 7.0 | 132,645 | 117,248 | 2672 | 1099 | 950 | 623 | 2382 | 915 | 1052 | 415 | |
| 8 | 1 | 49 | 7.3 | 212,830 | 146,430 | 3138 | 1628 | 928 | 582 | 2794 | 1299 | 930 | 565 |
| 2 | 78 | 7.9 | 175,388 | 166,622 | 3229 | 1527 | 1169 | 533 | 3762 | 1943 | 1186 | 633 | |
| 3 | 108 | 8.6 | 316,156 | 315,490 | 3913 | 1694 | 1417 | 802 | 4377 | 2137 | 1477 | 763 | |
| 9 | 1 | 132 | 5.7 | 207,620 | 181,761 | 2618 | 1004 | 1128 | 486 | 2704 | 965 | 1021 | 718 |
| 2 | 168 | 9.3 | 301,681 | 381,848 | 4439 | 1697 | 1658 | 1084 | 4867 | 1966 | 1694 | 1207 | |
| 3 | 203 | 7.0 | 157,550 | 125,030 | 2723 | 1300 | 820 | 603 | 2727 | 1345 | 928 | 454 | |
| 10 | 1 | 40 | 8.1 | 144,204 | 154,457 | 2963 | 1302 | 1001 | 660 | 2769 | 1141 | 1003 | 625 |
| 2 | 70 | 8.8 | 281,301 | 326,961 | 4204 | 1659 | 1604 | 941 | 4397 | 1895 | 1638 | 864 | |
| 3 | 97 | 8.1 | 257,067 | 274,005 | 3676 | 1397 | 1420 | 859 | 3677 | 1403 | 1432 | 842 | |
| 4 | 135 | 7.5 | 137,842 | 166,236 | 2734 | 956 | 1094 | 684 | 2899 | 1138 | 1128 | 633 | |
| 5 | 162 | 7.5 | 194,881 | 225,728 | 2842 | 1187 | 957 | 698 | 3262 | 1652 | 1118 | 492 | |
| 6 | 196 | 8.5 | 368,220 | 311,846 | 4006 | 1635 | 1503 | 868 | 4220 | 1813 | 1604 | 803 | |
| 11 | 1 | 131 | 8.4 | 223,325 | 153,311 | 3267 | 1188 | 1426 | 653 | 3658 | 1487 | 1396 | 775 |
| 2 | 160 | 8.9 | 350,880 | 319,955 | 5857 | 2871 | 1948 | 1038 | 5025 | 2063 | 1936 | 1026 | |
| 3 | 193 | 8.8 | 202,446 | 185,489 | 4376 | 2102 | 1429 | 845 | 4207 | 2004 | 1548 | 655 | |
| 12 | 1 | 91 | 6.5 | 164,559 | 133,873 | 3767 | 1159 | 1518 | 1090 | 3894 | 1193 | 1627 | 1074 |
| 2 | 126 | 6.7 | 190,355 | 147,707 | 3435 | 1117 | 1490 | 828 | 3807 | 1441 | 1553 | 813 | |
| 3 | 153 | 8.3 | 266,442 | 274,558 | 3325 | 1202 | 1433 | 690 | 3962 | 1816 | 1485 | 661 | |
| 13 | 1 | 96 | 8.3 | 205,658 | 181,497 | 4170 | 1420 | 1772 | 978 | 4424 | 1698 | 1820 | 906 |
| 2 | 126 | 4.1 | 121,324 | 71,953 | 1964 | 672 | 819 | 473 | 1901 | 629 | 824 | 448 | |
| 3 | 159 | 3.3 | 259,972 | 122,373 | 1693 | 498 | 607 | 588 | 1613 | 596 | 711 | 306 | |
| 4 | 193 | 3.6 | 141,730 | 129,298 | 2278 | 746 | 889 | 643 | 2125 | 652 | 978 | 495 | |
| 14 | 1 | 106 | 7.6 | 171,517 | 123,718 | 3983 | 1464 | 1533 | 986 | 3821 | 1474 | 1697 | 650 |
| 2 | 145 | 10.0 | 307,196 | 257,059 | 5210 | 1903 | 2111 | 1196 | 5193 | 1917 | 2155 | 1121 | |
| 3 | 174 | 8.6 | 294,043 | 234,330 | 5255 | 2066 | 2109 | 1080 | 5063 | 1914 | 2180 | 969 | |
| 15 | 1 | 109 | 7.6 | 293,670 | 281,731 | 5743 | 2102 | 2281 | 1360 | 5671 | 2125 | 2271 | 1275 |
| 2 | 149 | 9.2 | 336,525 | 208,733 | 6774 | 3140 | 2409 | 1225 | 5499 | 1945 | 2263 | 1291 | |
| 3 | 179 | 8.9 | 330,367 | 333,966 | 6769 | 2645 | 2827 | 1297 | 7113 | 2893 | 2733 | 1487 | |
| 16 | 1 | 65 | 10.1 | 154,081 | 120,320 | 3958 | 2104 | 1295 | 559 | 4680 | 2781 | 1231 | 668 |
| 2 | 93 | 7.5 | 82,914 | 129,435 | 2353 | 951 | 971 | 431 | 3826 | 2240 | 938 | 648 | |
| 3 | 121 | 8.4 | 170,686 | 129,842 | 2309 | 846 | 990 | 473 | 2923 | 1363 | 1041 | 519 | |
| 4 | 149 | 9.2 | 222,313 | 338,706 | 3953 | 2124 | 1225 | 604 | 3497 | 1584 | 1114 | 799 | |
| 17 | 1 | 38 | 10.4 | 186,933 | 204,148 | 3987 | 1595 | 1576 | 816 | 3989 | 1520 | 1482 | 987 |
| 2 | 72 | 10.4 | 327,534 | 269,737 | 4910 | 1832 | 1960 | 1118 | 4937 | 1785 | 1982 | 1170 | |
| 3 | 100 | 9.9 | 338,695 | 320,021 | 6006 | 2242 | 2594 | 1170 | 6017 | 2145 | 2406 | 1466 | |
| 4 | 133 | 8.3 | 238,994 | 219,733 | 4068 | 1385 | 1832 | 851 | 4894 | 2031 | 1829 | 1034 | |
| 5 | 159 | 9.8 | 319,265 | 362,508 | 4659 | 1735 | 1788 | 1136 | 4634 | 1803 | 1768 | 1063 | |
| 6 | 190 | 9.4 | 328,468 | 314,207 | 5478 | 2402 | 2028 | 1048 | 4995 | 1939 | 1995 | 1061 | |
| 18 | 1 | 107 | 10.3 | 158,525 | 173,526 | 3828 | 1916 | 1139 | 773 | 3548 | 1716 | 1336 | 496 |
| 2 | 140 | 7.6 | 149,758 | 119,284 | 3002 | 1482 | 1015 | 505 | 2922 | 1351 | 1048 | 523 | |
| 3 | 168 | 9.6 | 231,146 | 188,059 | 3287 | 1543 | 1213 | 531 | 3622 | 1833 | 1133 | 656 | |
| 19 | 1 | 135 | 11.5 | 259,696 | 202,839 | 5313 | 2675 | 1607 | 1031 | 4768 | 2175 | 1687 | 906 |
| 2 | 165 | 9.7 | 220,708 | 153,669 | 4602 | 1931 | 1379 | 677 | 4580 | 1457 | 1307 | 767 | |
| 3 | 194 | 8.9 | 207,079 | 199,449 | 3987 | 2188 | 1544 | 870 | 3531 | 2201 | 1616 | 763 | |
| 20 | 1 | 72 | 9.0 | 174,939 | 163,847 | 4287 | 1908 | 1563 | 816 | 4296 | 1918 | 1546 | 832 |
| 2 | 100 | 9.0 | 158,163 | 147,436 | 3960 | 2012 | 1264 | 684 | 3567 | 1655 | 1292 | 620 | |
| 3 | 136 | 8.7 | 142,320 | 146,028 | 3386 | 1215 | 1471 | 700 | 4241 | 1980 | 1515 | 746 | |
| 4 | 168 | 7.9 | 174,443 | 164,425 | 3721 | 1783 | 1368 | 570 | 3956 | 1964 | 1341 | 651 | |
| 21 | 1 | 196 | 8.4 | 289,408 | 294,277 | 4467 | 1852 | 1830 | 785 | 5430 | 2607 | 1749 | 1074 |
| 22 | 1 | 203 | 10.0 | 211,167 | 188,905 | 4903 | 2054 | 1896 | 953 | 5288 | 2274 | 1876 | 1138 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trujillo-Priego, I.A.; Lane, C.J.; Vanderbilt, D.L.; Deng, W.; Loeb, G.E.; Shida, J.; Smith, B.A. Development of a Wearable Sensor Algorithm to Detect the Quantity and Kinematic Characteristics of Infant Arm Movement Bouts Produced across a Full Day in the Natural Environment. Technologies 2017, 5, 39. https://doi.org/10.3390/technologies5030039
Trujillo-Priego IA, Lane CJ, Vanderbilt DL, Deng W, Loeb GE, Shida J, Smith BA. Development of a Wearable Sensor Algorithm to Detect the Quantity and Kinematic Characteristics of Infant Arm Movement Bouts Produced across a Full Day in the Natural Environment. Technologies. 2017; 5(3):39. https://doi.org/10.3390/technologies5030039
Chicago/Turabian StyleTrujillo-Priego, Ivan A., Christianne J. Lane, Douglas L. Vanderbilt, Weiyang Deng, Gerald E. Loeb, Joanne Shida, and Beth A. Smith. 2017. "Development of a Wearable Sensor Algorithm to Detect the Quantity and Kinematic Characteristics of Infant Arm Movement Bouts Produced across a Full Day in the Natural Environment" Technologies 5, no. 3: 39. https://doi.org/10.3390/technologies5030039
APA StyleTrujillo-Priego, I. A., Lane, C. J., Vanderbilt, D. L., Deng, W., Loeb, G. E., Shida, J., & Smith, B. A. (2017). Development of a Wearable Sensor Algorithm to Detect the Quantity and Kinematic Characteristics of Infant Arm Movement Bouts Produced across a Full Day in the Natural Environment. Technologies, 5(3), 39. https://doi.org/10.3390/technologies5030039