

Model-Driven Clock Synchronization Algorithms for Random Loss of GNSS Time Signals in V2X Communications



Abstract
1. Introduction
2. Models and Algorithms
2.1. Clock Model
2.1.1. Local Clock Model
2.1.2. PPS Model
- (1)
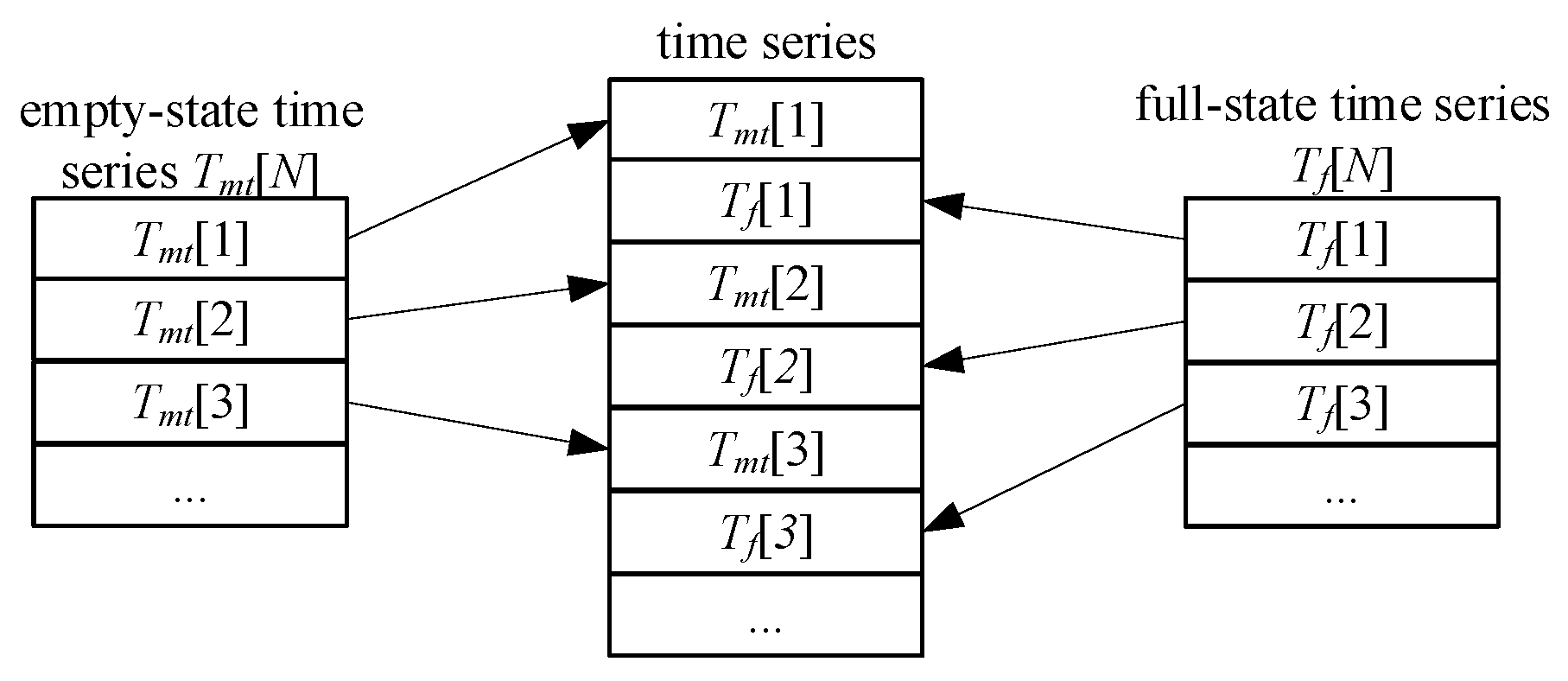
- Tf and Tmt are both discrete random variables, and these two are mutually independent.
- (2)
- Tf and Tmt alternate in the duration sequence.
2.2. Clock Synchronization Algorithm
2.2.1. Virtual Clock
2.2.2. Parameter Estimation
- (1)
- Parameter initialization
- (2)
- Prediction stage
- (3)
- Renewing the gain matrix
- (4)
- Renewing model parameters
- (5)
- Renewing the matrix P
2.2.3. Self-Compensation Algorithm
3. Experimental
3.1. Experimental Platform
3.2. Data Acquisition
4. Results and Discussion
4.1. Clock Model Performance Analysis
4.1.1. Virtual Clock Performance Analysis
4.1.2. PPS Model Performance Analysis
4.2. Algorithm Performance Analysis
4.2.1. Influence of Noise on Algorithm Convergence
4.2.2. Performance Comparison
4.2.3. Real-Time Verification
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Solaas, J.V.; Mariconti, E.; Tuptuk, N. Systematic Literature Review: Anomaly Detection in Connected and Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2025, 26, 43–57. [Google Scholar] [CrossRef]
- Li, J.; Fotouhi, A.; Liu, Y.G. Review on Eco-driving Control for Connected and Automated Vehicles. Renew. Sust. Energy Rev. 2024, 189, 114025. [Google Scholar] [CrossRef]
- Tavasoli, M.; Sarrafzadeh, A.; Khaleghi, M. Data Communication Challenges of Connected and Automated Vehicles in Rural Areas. IEEE Access 2025, 13, 29220–29251. [Google Scholar] [CrossRef]
- Chen, S.Z. Critical Thinking and Suggestions on C-V2X with the Developments of Intelligent Connected Vehicles. Telecommun. Sci. 2022, 38, 1–24. [Google Scholar]
- Ansere, J.A.; Han, G.; Wang, H. A Novel Reliable Adaptive Beacon Time Synchronization Algorithm for Large-Scale Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2019, 68, 11565–11576. [Google Scholar] [CrossRef]
- Li, M.; Ma, W.; Peng, Z. Skew Estimation for Clock Synchronization Without Timestamp Exchange Under Exponential Delays. IEEE Trans. Veh. Technol. 2023, 72, 16582–16591. [Google Scholar] [CrossRef]
- Haider, S.; Abbas, G.; Abbas, Z.H. VLCS: A Novel Clock Synchronization Technique for TDMA-based MAC Protocols in VANETs. In Proceedings of the 2019 4th International Conference on Emerging Trends in Engineering, Sciences and Technology (ICEEST), Karachi, Pakistan, 10–11 December 2019. [Google Scholar] [CrossRef]
- Medani, K.; Aliouat, M.; Aliouat, Z. Fault tolerant time synchronization using offsets table robust broadcasting protocol for vehicular ad hoc networks. AEU-Int. J. Electron. Commun. 2017, 81, 192–204. [Google Scholar] [CrossRef]
- Shi, C.; Gu, S.F.; Lou, Y.D. Real-time wide-area precise positioning and precise timing service system. Acta Geod. Cartogr. Sin. 2022, 51, 1206–1214. [Google Scholar]
- Jiao, W.H.; Zhang, H.J.; Zhu, L. Assessment method and analysis of GNSS broadcast coordinated universal time offset error. Acta Geod. Cartogr. Sin. 2020, 49, 805–815. [Google Scholar]
- Grenier, A.; Lohan, E.S.; Ometov, A. A Survey on Low-Power GNSS. IEEE Commun. Surv. Tutor. 2023, 25, 1482–1509. [Google Scholar] [CrossRef]
- Kim, W.; Seo, J. Low-Cost GNSS Simulators With Wireless Clock Synchronization for Indoor Positioning. IEEE Access 2023, 11, 55861–55874. [Google Scholar] [CrossRef]
- Hasan, K.F.; Wang, C.; Feng, Y. Time synchronization in vehicular ad-hoc networks: A survey on theory and practice. Veh. Commun. 2018, 14, 39–51. [Google Scholar] [CrossRef]
- Bauer, J.; Andrich, C.; Ihlow, A. Characterizing GPS Disciplined Oscillators for Distributed Vehicle-to-X Measurement Applications. In Proceedings of the 2020 Joint Conference of the IEEE International Frequency Control Symposium and International Symposium on Applications of Ferroelectrics (IFCS-ISAF), Keystone, CO, USA, 19–23 July 2020. [Google Scholar] [CrossRef]
- Bui, Q.T.; Elango, A.; Landry, R. FPGA-Based Autonomous GPS-Disciplined Oscillators for Wireless Sensor Network Nodes. Sensors 2022, 22, 3135. [Google Scholar] [CrossRef] [PubMed]
- Boehmer, T.J.; Bilén, S.G. Low-Power GPS-Disciplined Oscillator Module for Distributed Wireless Sensor Nodes. Electronics 2021, 10, 716. [Google Scholar] [CrossRef]
- Hasan, K.F.; Feng, Y.; Tian, Y.C. Precise GNSS Time Synchronization with Experimental Validation in Vehicular Networks. IEEE Trans. Netw. Serv. Manag. 2023, 20, 3289–3301. [Google Scholar] [CrossRef]
- Hasan, K.F.; Feng, Y.; Tian, Y.C. GNSS Time Synchronization in Vehicular Ad-Hoc Networks: Benefits and Feasibility. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3915–3924. [Google Scholar] [CrossRef]
- Xuan, X.; He, J.; Zhai, P. Kalman Filter Algorithm for Security of Network Clock Synchronization in Wireless Sensor Networks. Mob. Inf. Syst. 2022, 2022, 1–11. [Google Scholar] [CrossRef]
- Phil, K. Kalman Filter for Beginners: With MATLAB Examples; CreateSpace Independent Publishing Platform: North Charleston, SC, USA, 2011; pp. 47–72. [Google Scholar]
- Yiğitler, H.; Badihi, B.; Jäntti, R. Overview of Time Synchronization for IoT Deployments: Clock Discipline Algorithms and Protocols. Sensors 2020, 20, 5928. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: x: Reference time array y: Local time array deg: Polynomial order Output: θ: Parameter | |
| 1: | For i in range(length(x)) do |
| 2: | V[i,0] x[i] |
| 3: | V[i,1] 1 |
| 4: | end |
| 5: | U, S, VT svd(V) |
| 6: | threshold max(len(x), deg + 1) * max(S) * accuracy |
| 7: | for s in S do |
| 8: | If s > threshold |
| 9: | then s_inv 1/s |
| 10: | else s_inv 0 |
| 11: | end |
| 12: | θVTT * diag(S_inv) * UT * y |
| 13: | Return θ |
| Model Order | 1st | 2nd | 3rd | 4th | 7th |
|---|---|---|---|---|---|
| mean value/10−6 µs | 2.865 | 3.659 | 1.648 | 1.192 | 5.316 |
| standard deviation/µs | 77.745 | 49.854 | 38.884 | 30.416 | 18.428 |
| nth-Order Coefficient | D1 | D2 | D3 |
|---|---|---|---|
| 4 | −9.62 × 10−20 | −1.28 × 10−19 | −1.28 × 10−19 |
| 3 | 1.82 × 10−15 | 3.62 × 10−15 | 3.33 × 10−15 |
| 2 | −6.82 × 10−12 | −3.82 × 10−11 | −3.00 × 10−11 |
| 1 | 0.999999588 | 0.999999057 | 0.99999926 |
| 0 | 9.62 × 10−5 | 3.05 × 10−5 | 9.35 × 10−5 |
| Statistical Quantity | Total Counts | Mean Counts | Frequency |
|---|---|---|---|
| empty | 2831 | 943.67 | 0.0655 |
| full | 40,369 | 13,456.33 | 0.9345 |
| Statistical Quantity | Mean Value | Standard Deviation | Maximum Value | Minimum Value |
|---|---|---|---|---|
| empty-state duration/s | 1.074 | 0.310 | 7 | 1 |
| full-state duration/s | 15.259 | 14.739 | 112 | 1 |
| Duration/s | 1 | 2 | 3 | 4 | 7 |
|---|---|---|---|---|---|
| occurrence count | 2462 | 157 | 12 | 3 | 1 |
| frequency | 0.9343 | 0.0596 | 0.0046 | 0.0011 | 0.0004 |
| Distribution Model | SSE | p-Value |
|---|---|---|
| Gamma | 0.078939 | 0.466 |
| Chi-squared | 0.058494 | 0.032 |
| Exponential | 0.003487 | 0.364 |
| Log-normal | 0.004713 | 0.187 |
| Noise Levels/μs | 100 | 10 | 1 |
|---|---|---|---|
| mean value/μs | 0.744 | 0.688 | 0.697 |
| standard deviation/μs | 102.319 | 10.291 | 1.103 |
| Algorithm | LS | KF |
|---|---|---|
| mean value/µs | −0.365 | 0.070 |
| standard deviation/µs | 13.952 | 10.420 |
| Terminals | D1 | D2 | D3 |
|---|---|---|---|
| mean value/µs | 0.326 | 0.198 | −1.079 |
| standard deviation/µs | 13.136 | 15.811 | 13.093 |
| Samples | Full-Value Events | Empty-Value Events | ||
|---|---|---|---|---|
| Durations (s) | Frequency | Durations (s) | Frequency | |
| simulations | 15.248 | 0.9341 | 1.07433 | 0.0659 |
| measurements | 15.259 | 0.9345 | 1.07438 | 0.0655 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, W.; Zhang, J.; Cheng, X. Model-Driven Clock Synchronization Algorithms for Random Loss of GNSS Time Signals in V2X Communications. Technologies 2025, 13, 273. https://doi.org/10.3390/technologies13070273
Hu W, Zhang J, Cheng X. Model-Driven Clock Synchronization Algorithms for Random Loss of GNSS Time Signals in V2X Communications. Technologies. 2025; 13(7):273. https://doi.org/10.3390/technologies13070273
Chicago/Turabian StyleHu, Wei, Jiajie Zhang, and Ximing Cheng. 2025. "Model-Driven Clock Synchronization Algorithms for Random Loss of GNSS Time Signals in V2X Communications" Technologies 13, no. 7: 273. https://doi.org/10.3390/technologies13070273
APA StyleHu, W., Zhang, J., & Cheng, X. (2025). Model-Driven Clock Synchronization Algorithms for Random Loss of GNSS Time Signals in V2X Communications. Technologies, 13(7), 273. https://doi.org/10.3390/technologies13070273