Abstract
By increasing the number of vehicles, an intelligent parking system can help drivers in finding parking slots by providing real-time information. To address this issue, this study developed an Arduino-based automated parking system integrating sensors to assist drivers in quickly discovering available parking slots with real-time space detection and dynamic access control. This system consists of ultrasonic sensors, NodeMCU, an LCD screen, a servo motor, and an Arduino Uno. Each ultrasonic sensor is assigned a specific number corresponding to its slot number, which helps to identify the locations. These sensors were connected to the NodeMCU to collect, process, and transfer data to the Arduino board. If the ultrasonic sensor cannot detect the vehicle in the parking space, the LCD screen will show the number of specific slots. The Arduino will use the servo motor to open the entrance gate if a vehicle is detected by another ultrasonic sensor next to it. Otherwise, the system prevents any vehicle from entering the parking area when all of the available spaces are occupied. The system prototype is constructed and empirically evaluated to verify its performance and efficiency. The results indicate that the system successfully monitors parking spot occupancy and validates its capacity for real-time information updates.
1. Introduction
1.1. Background
A smart city is actually a city region that utilizes enhanced systems like the Internet of Things (IoT), data analytics, and artificial intelligence (AI) to strengthen the quality of life for its residents, enhance operational productivity, and improve sustainability. The idea of an intelligent urban area includes the utilization of several systems and structures, like intelligent transport systems, intelligent waste management platforms, intelligent building automation, and intelligent energy management, to optimize the utility of resources as well as enhance the general quality of life. The purpose of an intelligent urban area is actually to enhance the city’s livability, sustainability, and productivity, while also improving the economic development and decreasing the environmental effect of the urban area. By utilizing real-time monitoring and data analytics, an intelligent urban area can effectively control resources, enhance public safety, decrease traffic congestion, and offer considerably better services for the people [1].
Traffic congestion is actually a crucial issue with significantly negative effects worldwide. The outcomes are extensive, such as greater crash rates, extreme air pollution, extra fuel usage, increased travel times, as well as damage of societal wellness. For instance, the 2019 city mobility report estimates that traffic jam throughout the United States generated 8.8 billion hours of extra travel time yearly and 3.3 billion gallons of greater fuel usage, totaling an expense of about $179 billion [2]. It was approximated that between 8% and 74% of vehicles in traffic jam were driving to discover accessible parking places in city centers like New York, London, and Detroit between 1927 and 2001 [3].
The plan for intelligent parking was presented to resolve the issue of parking areas as well as management in big cities. With the growing quantity of automobiles on highways, as well as the restricted quantity of parking areas, the congestion of automobiles is actually unavoidable. This particular congestion can result in environmental pollution and motorist violence. These aspects may aggravate, especially within the peak hours where the number of vehicles is at its highest level and finding an empty parking area is nearly impossible [4]. Cookson [5] noted that although 71 percent of United Kingdom (UK) motorists reported insufficient parking accessibility, occupancy rates for spots throughout the UK can be as low as 50 percent. This is an information issue more than it is a parking issue, which intelligent systems can assist in resolving. Nowadays, many motorists depend on live traffic data integrated into automobile navigation platforms to present practical travel times as well as optimized paths to their destinations. The greater part of motorists navigates to their destination without realizing where car parking is actually accessible whenever they reach there. When they arrive, drivers spend their time looking for an area to park, which leads to congestion. Of the 7035 UK drivers who replied to the questionnaire, 90% prefer the live parking accessibility.
Regarding intelligent parking, the collection of a suitable sensor device for car recognition is primarily based on the specifications of the parking lot, concentrating on solutions which conserve great precision while decreasing the total expense. The sensor units can be categorized into passive and active. These sensors range from magnetometers, distance sensors depending on either ultrasound or infrared, light sensors, as well as combinations of several sensor units [6,7,8]. Ultrasound sensors, as active sensors, are one of the common types that are used in several smart parking systems, such as Mohandes, Deriche [9], Soni and Kaur [10], Nikhar and Kamath [11], and Jabbar and Tiew [12]. Kumar, Chilamkurti [13] compared the utility of several kinds of sensor devices, such as magnetic, light sensors, and acoustics, regarding parking management. Bachani, Qureshi [14] provided a detailed evaluation of the important factors of the layout of a smart parking platform, specifically the collection of sensor devices as well as the ideal location of their deployment for precise recognition. Cameras equipped with video analysis may be applied to identify automobiles in parking lots, as shown in various research investigations, such as Jo [15], Ruili, Haocong [16], Bura, Lin [17], Ke, Zhuang [18], and Sudhakar, Reddy [19]. Some researchers e.g., Tang, Zheng [20], Jatuporn, Udomporn [21], Yan, Yang [22], Yang, Portilla [23], Patil and Bhonge [24], and Grodi, Rawat [25] utilized a wireless sensor network based parking management system. Alkheder, Al Rajab [26] presented an intelligent parking platform regarding shopping malls in the city of Abu Dhabi, particularly on weekdays, holidays, and weekends.
The rapid advancement of autonomous vehicle technologies further strengthens the relevance of the smart parking system, as future intelligent transport infrastructures will require seamless interactions between autonomous vehicles and parking management platforms for improved traffic efficiency and reduced congestion [27].
1.2. Identified Technical Gap and Hypothesis
Existing smart parking systems often rely on camera-based vision, RFID tags, or large-scale wireless sensor networks that increase cost, computational complexity, and maintenance effort. There remains a need for a low-cost, modular system capable of reliable real-time detection and gate control using simple embedded hardware. This study hypothesizes that integrating ultrasonic sensors with NodeMCU–Arduino coordination can provide accurate and fast slot monitoring comparable to complex systems while remaining affordable and scalable for small and medium parking facilities.
1.3. Research Novelty
The novelty of this particular study is based on the creation and execution of a smart, low-cost, as well as totally intelligent parking model, which integrates enhanced systems for improved effectiveness and user comfort. In contrast to prior works that focused on either isolated sensor nodes or centralized cloud-based solutions, this study introduces a hybrid NodeMCU–Arduino architecture capable of distributed sensing and synchronized real-time control. This system utilizes an ultrasonic sensor to precisely identify live parking spot availability, in contrast to traditional parking systems that depend on human oversight or limited automation. The integration of NodeMCU modules with a central Arduino controller enables continued communication between slot-level sensors and the entrance control unit, thereby minimizing latency and enhancing decision accuracy. The incorporation of a servo motor enables intelligent entrance management, therefore removing the requirement for individual involvement in entry operations. Furthermore, an LCD display provides an easy user interface, offering live details on the quantity of occupied as well as accessible parking slots, and the particular place of the free slot.
This particular process provides substantial enhancements in user experience, operational performance, and automation. Merging several elements into a cohesive whole, it tackles frequent difficulties like time period delays and area mismanagement. Unlike existing systems that separately manage detection or access, the proposed model integrates detection, control, and display in one unified framework validated through prototype implementation. The incorporation of live recognition as well as exhibit functions differentiates this particular technique from current options, making it a useful contribution to the subject of smart transport programs and intelligent urban infrastructure. Additionally, the design emphasizes low-cost scalability; each modular unit (one NodeMCU with its sensors) can independently manage a parking segment and communicate with the main controller, allowing future expansion to multilevel parking facilities.
Additionally, the prototype’s scalable and modular architecture gives a flexible foundation regarding future improvements, such as integration with IoT, smartphone app assistance for live parking slot bookings, or distance tracking. Overall, the combination of distributed sensing, synchronized real-time control, and empirical validation demonstrates a novel contribution to the development of affordable and extensible parking systems for intelligent transportation and smart city applications.
Compared with alternative approaches, such as cameras, RFID, or wireless sensor network systems, this prototype offers similar functional capability at significantly lower cost and complexity, making it a practical option for small- to medium-scale parking facilities.
The core innovation of this research lies in the integration of distributed sensing and actuation into a unified, low-cost architecture that operates in real time without dependence on cloud computing or vision-based systems, demonstrating a practical and scalable alternative for intelligent parking automation.
This research is organized as follows. Section 2 presents a literature assessment of the current research on smart parking control management. Section 3 delineates the system design and modeling, including component selection, automated parking system architecture, automated parking system design, and prototype design. Section 4 delineates system development and implementation, followed by the main empirical results of this research in Section 5. Section 6 provides a summary of the information, limitations, and prospective research for the current research.
2. Literature Review
The advancement of parking systems is actually quite fast, and numerous nations around the world have parking systems that can utilize parking areas efficiently. This particular system utilizes ultrasonic sensors as the major unit for detecting or identifying whether or not parking areas are accessible. Below is a summary of these kinds of research.
Jeong and Choi [28] developed an economical design and execution of a parallel parking assist system using ultrasonic sensors. This system necessitates many kinds of sensors, including ultrasonic, video, laser, and radar sensors, for the identification of parking areas. The testing findings indicate that the developed prototype is resilient and effectively executes parking space recognition and autonomous steering control.
Wu and Tsai [29] utilized an ultrasonic sensor affixed to a smart wheeled mobile robot to assess the parking space environment, simulate motorists’ parking strategies, and execute roadside as well as reverse parking maneuvers. Upon the detection of a sufficient parking space by this sensor, the robot may autonomously manipulate the servo motors of two wheels to execute turning, forward motion, reverse, and halting, until the vehicle is accurately positioned inside the designated parking area. The findings indicate that this particular research may successfully replicate real parking scenarios, reduce parking safety distances, and achieve automated parking.
Zadeh and Cruz [30] introduced an innovative method by offering drivers real-time data on the accessibility of parking areas using an application for smartphones. Raspberry Pi and Ultrasonic sensors were utilized at parking zone entrances to identify vehicles and quantify the quantity of available parking spaces. Drivers may see available parking spaces in real time on a map and travel to the closest open spots utilizing the application for their smartphones. This system was developed for several categories of parking zones, including open area vehicle parking and multilevel vehicle parking.
Jindaprakai and Nuchitprasitchai [31] suggested a smart parking system that utilizes 3-axis magnetic, ultrasonic, and infrared sensors. Whenever detectors identify a vehicle inside the parking area, the information can be transferred through the LoRaWan signal to a portal unit via a wireless system. The z-axis information as well as range information can be processed and the empty parking spaces can be shown on a smartphone app; therefore, the motorists are able to book an area prior to reaching the parking location. The outcome demonstrates that ultrasonic as well as magnetic sensors have a precision of 100% for both metallic and non-metallic items, outdoors and indoors, and both heavy rain and sunny situations.
Mansour and Said [32] carried out autonomous parallel vehicle parking, where a vehicle discovers a vacant appropriate parking space, after which it performs parallel parking autonomously. Applying this particular platform requires some hardware features like an ultrasonic sensor, DC motor, infrared sensor, servo motor, and microcontroller. They included several safety options to this particular prototype, like open door as well as alcohol recognition. The outcomes demonstrate that the vehicle is actually able to park itself right after executing all the steps selected through the algorithm.
Allbadi et al. [33] developed an intelligent parking platform utilizing ultrasonic and infrared sensors that is actually operated through an Arduino microcontroller. In this project, the Radio Frequency Identification (RFID) reader gives permission to enter the intelligent parking area. A smartphone app is included to inform drivers about the vacant spots through a Wi-Fi system. The prototype’s results demonstrate that the car park utilized a mobile application, sensors, and an LCD screen to effectively control parking.
Jabbar and Wei [34] designed an IoT Raspberry Pi-based parking control to assist drivers to quickly discover accessible parking areas with GPS data and live vision, all through a mobile app. Their model consists of Raspberry Pi 4 microcontroller, ultrasonic sensors, GPS, and Pi camera module. Based on the outcomes, this system can efficiently track the existence of outside parking areas throughout the intelligent campus area, and its strength regarding updating the information to the IoT platform in real time was confirmed.
Xiang and Pan [35] developed a smart parking platform depending on ZigBee and ARM wireless detector systems. Initially, ultrasonic sensors are generally utilized to track whether the parking area is vacant or occupied. The details are sent to the ARM operator via the ZigBee wireless sensor system, and the ARM operator establishes whether there are empty parking areas depending on the gathered data. Next, a region-based convolutional neural network was used for the identification of the vehicle registration plate. The test results show that the efficiency of the car park is effectively improved and that it is very convenient for motorists.
Veeramanickam and Venkatesh [36] suggested an IoT-based intelligent parking design to assist drivers by allocating and reserving users’ automobiles to vacant accessible parking spots as per time-to-time accessibility in various parking spots using ultrasonic sensors and passive infrared sensors. This particular intelligent parking is actually operating on a real-time basis with inputs depending on the priority of drivers’ needs and is diverse in reserving parking spots with a first-come, first-serve preference.
The development and design of an intelligent parking platform were described by Sobti and Dixit [37] utilizing the Blynk cloud platform and ESP8266 component. The platform monitors parking area accessibility and assists motorists by directing their vehicles into given areas utilizing servo motors, LED screens, and ultrasonic sensors.
Jabbar and Tiew [12] presented an innovative IoT-based intelligent parking management platform that utilizes a long-range wide area network system to overcome conventional limitations associated with implementation costs, energy consumption, and communication range seen in existing platforms. This device integrates an Arduino board and two sensors, including an ultrasonic detector and a triaxial magnetic sensor. The urban implementation of this system aims to reduce traffic congestion, enhance parking use, and increase user knowledge of available parking spots.
Table 1 lists a summary of the findings from prior studies on parking management in different countries using various sensors.

Table 1.
Summary of the prior studies of parking management.
3. System Design and Modeling
This section highlights the component selection, automated parking system architecture, automated parking system design, and prototype design. During the initial part, the constraints and problems statement of the current technologies were delineated. The component selection process begins with an examination of the materials used in prior research, including microcontrollers, sensors, NodeMCU (Node MicroController Unit), LCD screens, and servo motors, alongside a comparative analysis of their advantages and disadvantages. The architecture of the automated parking system is suggested, followed by the design of the automated system. The primary objective of this study is to verify the proper working of the system inside the constructed prototype.
3.1. Components Selection
The components and materials were selected depending on the requirement as well as compatibility established by the literature study undertaken. During the assessment of pertinent research, various design variants and components utilized, along with their respective purposes in automated parking platforms, were examined. The software and hardware were determined within the component evaluation process. The chosen hardware items were the Arduino Uno, ultrasonic sensor, LCD screen, NodeMCU, and servo motor. The selected software tools were Arduino Integrated Development Environment 2.3.6 (IDE) and Fritzing 1.0.6. Upon completion of component selection, the system architecture is determined. This section presents a review of the chosen components.
3.1.1. Arduino Uno
This is a microcontroller board using the ATmega328P. The device has 14 digital input/output pins (6 of which are capable of Pulse Width Modulation (PWM) output), 6 analog inputs, a 16 MHz ceramic resonator, a USB connection, a reset button, an ICSP header, and a power connector. It encompasses all necessary components to facilitate the microcontroller; only link it to the laptop via a USB connection or power it using an AC-to-DC converter or battery to commence operation. Arduino facilitates the connection and communication among diverse devices. Large projects may be built that use sensors, power supplies, and switches as inputs, while outputs manage diverse devices, such as lights and music, as seen in Figure 1 [33].
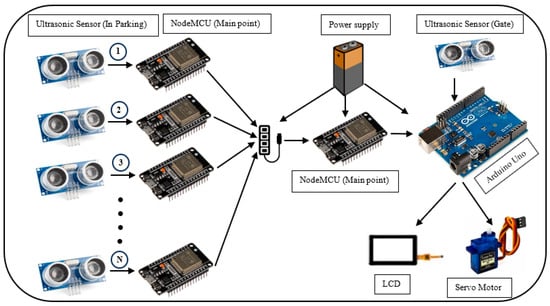
Figure 1.
Automated parking system architecture.
3.1.2. Ultrasonic Sensor
This particular type of sensor consists of a receiver and a transmitter, facilitating distance measurement from a target without compromising precision, except in the presence of sound-absorbing elements that inherently render the measurements imprecise. Measurements are conducted using a series of ultrasonic pulses at a frequency of 40 KHz, capable of detecting items within 2 cm to 400 cm. When an item is within the detector’s range, the ultrasonic pulses can be returned from the object’s surface, and the receiver subsequently captures their echoes [38,39].
3.1.3. NodeMCU
This is actually an open-source hardware and software production environment developed for the affordable system-on-a-chip (SoC) ESP8266. The ESP8266, developed by Espressif Systems, encompasses essential computer components, including Wi-Fi networking, RAM, CPU, and a contemporary operating system, together with a software development kit (SDK) [40].
3.1.4. Thin-Film Transistor (TFT) LCD Display
A thin-film transistor liquid crystal display, abbreviated as TFT LCD, is a form of LCD display utilizing thin-film transistors as components to enhance picture quality. This enables significantly better image quality, an enhanced reaction period, as well as lower power usage. TFT LCDs are generally much lighter and smaller than conventional LCDs, making them suitable for portable electronics. TFT LCDs are utilized throughout several industries, like consumer electronics, computer, medical, automotive, and telecommunications sectors, among others. This idea allows an LCD monitor to be installed both outside and within the parking area. It may display the total capacity at the area’s entrance and provide data on possibilities inside the parking area [41].
3.1.5. Servo Motor
This equipment has been used for an extended duration and they are applied for several purposes. They are compact yet very effective and exhibit significant energy efficiency. Servo motors are specific motors equipped with a feedback system that enables exact control of linear or angular position, velocity, and acceleration. They are utilized to control remote-operated or radio-operated toy vehicles, aircrafts, and robots. These motors are utilized in factories, robotics, continuous production, and culinary services [42].
3.2. Automated Parking System Architecture
The architecture of this automated system (Figure 1) aims to create effective and user-friendly management of parking spaces and access for vehicles. The essential components are an Arduino, ultrasonic sensors, USB Hub, a servo motor, NodeMCU components, and an LCD display. The power supply guarantees continuous system functionality by delivering consistent electrical power to the Arduino, main NodeMCU, and USB Hub. Information via these sensors is sent to the main NodeMCU that acts as the system’s main CPU. The primary NodeMCU evaluates the accessibility of parking and interfaces with the microcontroller to regulate output devices. The Arduino serves as the primary controller for the devices’ output, taking commands via the central NodeMCU and supervising the ultrasonic sensor at the entrance area. It regulates two essential outputs, including the LCD display and the servo motor. The servo motor controls the parking gate’s opening, and the LCD display presents real-time data on parking spot accessibility, showing whether they are occupied or vacant. This architecture offers a streamlined, modular form which improves effective parking management, scalability, and maintenance ease, making it appropriate for both big and small parking lots.
In this prototype, a split control structure using NodeMCU and Arduino was implemented. NodeMCU units manage sensor communication and data transfer, while the Arduino handles gate and display control. This division reduces wiring complexity and avoids I/O pin conflicts. Although a single-board ESP8266/ESP32 solution could also be used, the dual-controller approach provided clearer task separation and simplified debugging for the prototype. Future large-scale versions can consolidate the architecture into a unified controller to improve efficiency and reduce cost.
3.3. Automated Parking System Design
Upon confirmation of the model architecture, the electrical circuit diagram for the planned system is created with the Fritzing application, as seen in Figure 2. The NodeMCU modules are linked to the input/output pins of various ultrasonic sensors, creating a sensing network. Every parking area is equipped with an ultrasonic detector linked to a distinct NodeMCU. The NodeMCU devices interface with a main NodeMCU, facilitating uninterrupted data transfer. The core NodeMCU is energized by a power source and functions as the principal controller for the automated parking system.
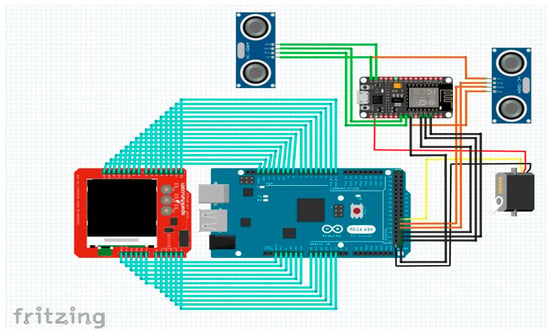
Figure 2.
Component circuit diagram using Fritzing tools.
An extra ultrasonic sensor is positioned at the parking entrance and is directly linked to an Arduino board. Upon the availability of at least one parking spot, the Arduino obtains these data from the main NodeMCU and then engages a servo motor to raise the entrance’s gate. An LCD panel linked to the Arduino concurrently displays real-time data on accessible parking spaces. All components are first mounted on a breadboard for testing prior to integration into the final system.
3.4. Prototype Design
Once the system design is accomplished, the fabrication procedure commences. During the production procedure, the elements are actually built based on the system architecture and design. Firstly, the procedure of measuring and cutting thick and color cardboard occurs. It is utilized as the walls of the vehicle parking model. Then, the wood boards were utilized as the foundation of the prototype to strengthen the design. Then, another piece of cardboard was glued on top of that to make some design for the parking model. Both serve as the foundation of the design. The purpose of the cardboard was to facilitate the insertion of electronic parts without damaging them. Once the bases were affixed, the other parts were built. The subsequent phase is allocating space for the parking places. To enhance the vibrancy and realism of the parking area, artificial grass was used. Every part of the model, including the Arduino board, ultrasonic sensor, NodeMCU, USB hub, LCD display, and servo motor, were successfully manufactured. Figure 3 illustrates the constructed model of the suggested system.

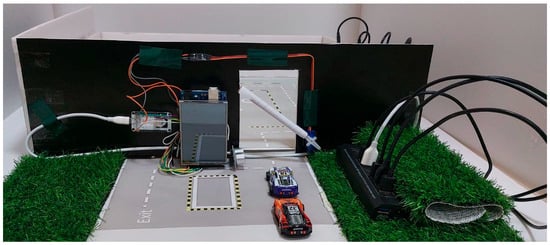
Figure 3.
The prototype of the parking system.
4. System Development and Implementation
4.1. System Development
The following section involves the configuration and activation of the system’s elements, namely the Arduino, ultrasonic sensors, LCD display, NodeMCU, and servo motor. Each component undergoes separate testing and configuration to guarantee correct operation prior to inclusion into the full system.
The Arduino Uno is chosen as the principal microcontroller because of its user-friendliness, dependability, and capacity to run preloaded programs without needing an operating system. In contrast to single-board computers, Arduino operates on firmware and executes commands directly via the Arduino IDE. The initialization procedure begins with the installation of the Arduino IDE on a computer, and this is crucial for creating, compiling, and transmitting code to the Arduino over a USB connection. The Arduino is generally powered via an external electricity source or the USB interface to guarantee constant functioning. Prior to developing extra modules, the Arduino board is examined individually to confirm its appropriate operating. This consists of guaranteeing that it can provide proper connection with the laptop, upload code with no issues, as well as react to simple instructions. When the preliminary installation is accomplished, the Arduino is actually prepared to be linked with additional modules for more execution.
The ultrasonic sensor performs a crucial function, as it is actually utilized to identify the existence of automobiles within parking spots as well as at the entry gate. The sensor functions through generating high-frequency sound waves as well as calculating the time period required for the waves to return back right after striking an item. This permits the platform to figure out whether a parking area is actually empty or occupied. For this particular study, the HC-SR04 ultrasonic detector is utilized because of its suitability, cost, and dependability with the Arduino board and NodeMCU. Every detector is actually logically positioned at parking spots to track automobile existence as well as at the entrance to identify arriving automobiles. The ultrasonic sensors are generally wired to guarantee a stable connection with the Arduino board and NodeMCU. The sensors utilized in parking spots are generally linked to the NodeMCU, where the VIN pin of the NodeMCU is actually linked to the VCC pin of the sensor, the D5 pine is linked to the TRIG pin, the D6 pin is linked to the ECHO pin, and the GND pin is linked to the GND pin of the NodeMCU. Furthermore, the sensor at the entrance is linked to each Arduino board and NodeMCU. Accordingly, the VIN pin of the NodeMCU is actually linked to the VCC pin of the ultrasonic, though pins 47 and 45 of the Arduino board are linked to the TRIG and ECHO pin, respectively, and the GND pin is linked to the GND pin of the NodeMCU. The ultrasonic installation consists of appropriate placing as well as adjustment to optimize recognition precision. Preliminary examining is actually carried out within various environmental situations to confirm performance and reduce disturbance. The information gathered from the sensors can be analyzed by the NodeMCU and Arduino to suitably modify the parking conditions.
The NodeMCU is an essential element, functioning as the principal processing as well as communication module for the automated parking system. This project involves the NodeMCU collecting information from several sensors positioned at parking spaces and the entry gate. It analyzes the information to ascertain the availability or occupancy of a parking place. The processed data are then sent to the Arduino which regulates the system’s physical parts, including the servo motor for gate control and the LCD screen for real-time parking data. Configuring the GPIO pins of the NodeMCU is essential for facilitating communication with sensors and other devices that are connected. It is actually programmed utilizing Arduino IDE, using the ESP8266 panel library regarding seamless incorporation. Furthermore, the NodeMCU is linked to a secure power supply and examined to guarantee dependable information transmitting. Although Wi-Fi connectivity is not presently taken into account in this particular research, the NodeMCU provides numerous benefits that make it a beneficial microcontroller regarding the intelligent parking platform. The following are the crucial factors to utilize the NodeMCU in the present setup, in addition to its potential function in upcoming improvements:
- The NodeMCU, with the ESP8266 microprocessor, offers superior GPIO pin availability for the efficient management of several sensors compared to the Arduino board. This particular option enables the platform to incorporate several sensors effectively without needing extra components, an advancement which is an appropriate option for parking area tracking.
- The NodeMCU functions at 3.3 V, using less power than Arduino, which runs at 5V. This is extremely advantageous for energy-efficient applications, particularly in battery-operated devices or extensive installations where power conservation is crucial.
- Compared to the Arduino microcontroller, the NodeMCU is considerably more affordable and provides greater processing speed. Its compact dimension make it perfect regarding embedded systems, such as intelligent parking platforms, where space efficiency is actually essential.
- Despite the fact that Wi-Fi is not presently used in this particular study, utilizing the ESP8266 Wi-Fi component in the NodeMCU gives the probability for upcoming platform improvements, such as live parking area tracking, an intelligent payment program, mobile app incorporation, cloud information storage, as well as incorporation with intelligent city facilities.
- This study employs a servo motor to regulate the parking entrance, ensuring accurate opening and shutting contingent upon automobile recognition. It functions by taking signals via the Arduino board that modifies its angle appropriately. The servo motor receives power via its GND pin, linked to the NodeMCU GND, and its control signal is actually attached to Arduino pin 43. Furthermore, an additional GND connection is established to the Arduino GND2 to provide adequate grounding. The Arduino transmits a PWM signal to the servo motor to regulate its rotation, with 0° indicating a closed entrance and 90° indicating an open entrance. The entrance will autonomously shut at a certain interval or upon the vehicle’s passage.
An LCD screen indicates real-time parking accessibility, conveying signals like “Parking Accessible” or “Parking Full” according to sensor information. The Arduino interprets information collected by the ultrasonic sensors and changes the LCD appropriately. The 5V output from the Arduino board directly powers the LCD. This configuration facilitates rapid real-time updates, enabling drivers to quickly check parking availability.
4.2. System Implementation
4.2.1. Implementation
In the preceding stage, all components were set up as well as tested utilizing Arduino to verify their appropriate operation prior to complete integration. During this step, the components are directly integrated into the smart parking system. The system shown in Figure 4 comprises Arduino, NodeMCU, ultrasonic sensors, an LCD display, and a servo motor, completely integrated to process as well as exhibit parking space accessibility in real time.
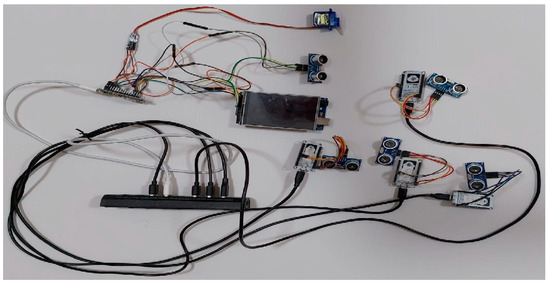
Figure 4.
Connection of the ultrasonic sensor, NodeMCU, an LCD, and a servo motor with Arduino Uno.
The deployment of the ultrasonic detector, as outlined in Algorithm 1, starts after its accurate placement in the parking zone. Every sensor is actually positioned at a predetermined angle and height to guarantee precise identification without obstruction. The sensors in the parking spaces are linked to the NodeMCU, whilst the sensor at the entrance is connected to both the Arduino and NodeMCU for optimal processing of information. The Arduino consistently transmits pulses to the ultrasonic sensor at the entry point and interprets the returned signals to ascertain the existence of an automobile. Upon detection of a car as well as the availability of at least a parking spot, the gate can be opened immediately.
Simultaneously, the NodeMCU aggregates information from several parking space sensors, interprets the data, and transmits real-time changes to the system. To guarantee dependable functionality, the sensors undergo testing and optimization throughout different circumstances, including varying illumination environments, reflecting surfaces, as well as distances, to reduce false readings. The final implementation ensures real-time automobile identification with great precision, hence enhancing parking management efficiency.
| Algorithm 1 Ultrasonic detection algorithm regarding Arduino-based automated parking system |
| Require: Ultrasonic sensors for detecting vehicle presence in parking slots and entrance gate |
| 1. Define HC-SR04 ultrasonic sensor pins: TRIG, ECHO, VCC, and GND. |
| 2. Set D_th → predefined threshold distance for detecting vehicles. |
| 3. Initialize HC-SR04 sensor for data acquisition. |
| 4. Send a trigger pulse to initiate ultrasonic measurement. |
| 5. Measure the time elapsed for the echo signal to return. |
| 6. Compute distance D(t) = (Time Elapsed × 34,300)/2 (speed of sound in cm/s). |
| 7. For each parking slot: |
| 8. If D(t) ≥ D_th then: |
| - Mark slot as “Available” |
| - Update LCD display with “Parking Available” |
| - Store data in NodeMCU |
| 9. Else: |
| - Mark slot as “Occupied” |
| - Update LCD display with ‘Parking Full’ |
| - Store data in NodeMCU |
| 10. Continuously send parking slot updates to the system. |
This study integrates an LCD display and a servo motor, based on Algorithm 2, with the Arduino to automate the parking entrance and deliver real-time information on accessible parking. The servo motor collects signals via the Arduino to modify its position, facilitating smooth and accurate gate operation according to the parking spot conditions. The LCD panel conveys real-time data on accessible and occupied parking spaces. It is linked to the microcontroller via the I2C communication interface for streamlined wiring or via a parallel connection enabling fast data transfer. The LCD is perpetually updated to provide the current parking condition, enabling visitors to readily ascertain spot accessibility after entrance.
| Algorithm 2 Entrance gate control utilizing ultrasonic and servo motor |
| Require: Automated gate control based on vehicle presence and parking availability |
| 1. Define TRIG and ECHO pins for the entrance ultrasonic sensor. |
| 2. Set D_gate → predefined threshold distance for detecting vehicles at the entrance. |
| 3. Monitor D(t) at the entrance sensor. |
| 4. If D(t) < D_gate (vehicle detected) then: |
| 5. Check parking slot availability from NodeMCU. |
| 6. If a slot is available: |
| - Send signal to Arduino to activate servo motor. |
| - Rotate servo motor to 90° (open gate). |
| - After a predefined delay, return servo motor to 0° (close gate). |
| 7. Else: |
| - Keep the gate closed. |
| - Display ‘Parking Full’ on LCD. |
| 8. Repeat process continuously. |
4.2.2. System Relaibility and Safety Measures
The prototype includes simple fault-handling logic to keep the operation safe. If any ultrasonic sensor fails to respond, the system assumes the slot is occupied to prevent incorrect entry. In case of power loss or servo malfunction, the gate returns to the closed position (fail-safe). The software uses a short time delay to confirm consistent readings and avoid false triggers. Although a full reliability or hazard analysis is beyond the current scope, these measures ensure safe basic operation of the prototype and can be expanded in future large-scale versions.
4.3. System Flowchart
The comprehensive functioning of the automated platform can be shown in the flowchart presented in Figure 5. The system starts with assessing the condition of the parking slots by utilizing different ultrasonic sensors positioned in certain parking areas. These sensors perpetually ascertain the existence or absence of an automobile in every parking spot. When a parking spot is accessible, the NodeMCU transmits an alert to the Arduino, which then activates the servo motor to raise the parking entrance, permitting automobile entry. The ultrasonic sensor positioned at the entrance guarantees that the automobile passes before the system is updated. Upon successful entry as well as parking of the car in a specified spot, the system updates the status of the parking space and displays the available spots on the LCD screen. The system always observes and updates the port’s status to ensure real-time precision. This methodical strategy facilitates effective parking management and guarantees that only automobiles with accessible parking spots are permitted entry, so averting congestion and enhancing parking operations.
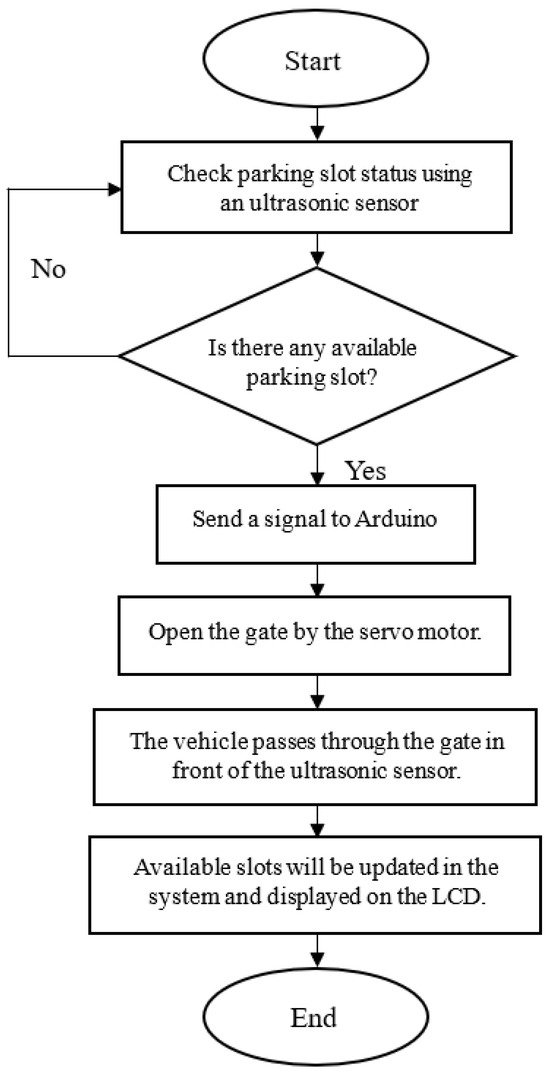
Figure 5.
Flowchart of the automated parking.
5. Empirical Findings
In the following section, the system validation as well as discussion of the outcomes are presented. The automated parking system in the prototype design, Figure 3, has been successfully implemented. This system comprises one Arduino board, five ultrasonic sensors, five NodeMCUs, one USB hub, one LCD display, and one servo motor. Four sensors are at the parking slots, and one is placed at the entrance gate. The ultrasonic detectors can recognize the existence of the automobile ahead to signify the occupants of the slots. Every detector is assigned a specific number matching to its slot, facilitating the identification of the respective slot numbers.
Each ultrasonic sensor was connected to the NodeMCU to collect, process, and transfer data to the Arduino board. The Arduino was placed beside the prototype to receive and analyze data. When the system is turned on, the automated parking system can begin operating. The mini automobile model simulates a genuine vehicle in the parking zone. In this regard, the LCD, as shown in Figure 6, can first show the existing parking slots (free or occupied). The ultrasonic sensor will detect any vehicle entering or leaving the slot and send data to the NodeMCU and Arduino. The LCD screen, as shown in Figure 6, will then update with the parking slot number. For example, Figure 6 shows that parking spaces 1 and 2 are occupied by an automobile, though parking spaces 3 and 4 are empty. For drivers, it is sufficient to obtain data via the sensors and obtain real-time parking slots on the LCD screen. If the ultrasonic sensor cannot detect the vehicle in the parking slot, it will show the number of specific slots and their numbers. So, if the ultrasonic sensor detects a vehicle at the entrance gate, the Arduino will open the gate with the servo motor (90° = open). After passing the vehicle, the Arduino will close the gate (0° corresponds to a closed gate). The system prevents any vehicle from entering the parking area when all of the available spaces are occupied. The findings confirm that the system is capable of monitoring parking spot occupancy, and its capability to update information in real time on the LCD panel is also validated.
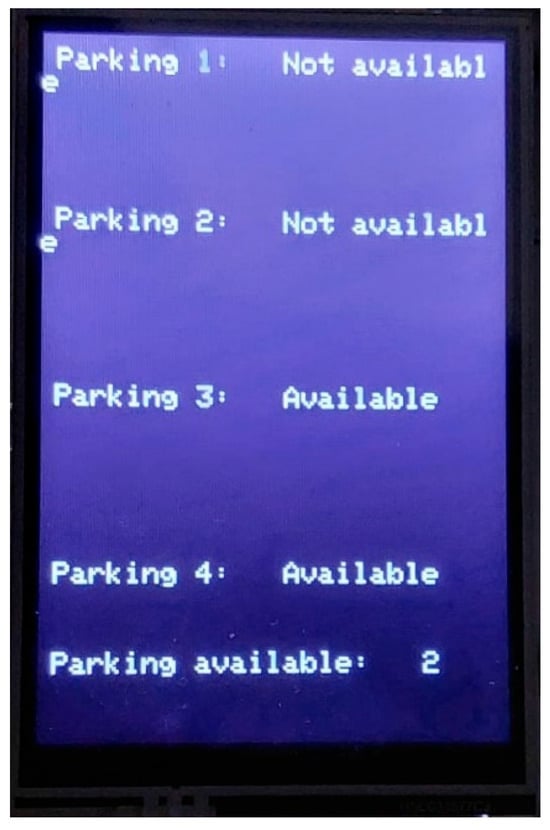
Figure 6.
LCD screen with parking slot information.
Although the prototype was implemented and validated for a limited number of parking slots, the proposed design is modular and can be expanded to larger parking facilities by incorporating additional ultrasonic sensors and multiple NodeMCU–Arduino units. Each unit can independently manage a group of slots or a specific level, with all data synchronized through wireless or IOT-based communication. For large facilities, an upgraded system could include synchronized allocation of variable spaces and continuous updates through LCD panels or mobile interfaces to minimize the risk of conflicts or delays in slot occupancy. These scalability considerations demonstrate the adaptability of the system for broader smart city applications.
The implemented system is a small-scale prototype developed to validate the core functionality and communication between the sensors, controller, and gate mechanism. Although not a full-scale or digital-twin system, it effectively demonstrates the feasibility of the proposed design and can be scaled up for large parking facilities.
During prototype testing, each parking slot sensor was checked repeatedly under standard indoor conditions. The system consistently detected vehicle presence or absence with a success rate above 95% across all four slots. The LCD display and servo motor reacted within approximately 1–2 s after vehicle detection, confirming reliable real-time response. Although comprehensive statistical testing (precision, recall, or environmental sensitivity) was not conducted, the observed results demonstrate dependable slot recognition and timely system actuation suitable for small-scale smart parking applications.
6. Conclusions and Future Work
Parking management is generally an increasing concern with growing automobile quantities and limited parking area, especially in the megacities. Conventional strategies frequently are unsuccessful during the peak period, resulting in income losses, unauthorized utilization, and inefficiencies. This particular problem is improved through the development of smart parking management that aims to help individual drivers by matching them to empty parking spots, reducing management expenses, improving parking area usage, saving time, and improving traffic congestion. To mitigate this specific issue, this research and prototype designed an Arduino-based automated parking system integrating sensors to help drivers quickly discover accessible parking slots with real-time space detection and dynamic access control. The prototype of the automated parking system includes five ultrasonic sensors (four sensors are at the parking slots, and one is placed at the entrance gate), five NodeMCUs, one USB hub, one LCD screen, one servo motor, and one Arduino Uno board. The ultrasonic sensors can identify the automobile’s existence ahead of time to signal the occupancy of the car parking space. Each ultrasonic sensor is assigned a unique number corresponding to the slot number to help track down the location. If the ultrasonic sensor cannot recognize the car in the parking area, it will show the number of slots along with the total number of parking slots. So, if the ultrasonic sensor detects a vehicle at the entrance gate, the Arduino will open it with the servo motor. The system prevents any vehicle from entering the parking area when all of the available spaces are occupied. Each of the parking spots was evaluated by positioning a small vehicle model in front of the ultrasonic sensor. In general, the system underwent practical testing to demonstrate its functionality and applicability. The results confirm that drivers are able to quickly monitor the unoccupied parking spaces via real-time information on the LCD screen. The designed system delivers convenience, intelligence, and accessibility, and its strength in updating the information in real-time was validated. The present work demonstrates the feasibility of the proposed system at prototype scale. However, it does not include long-term outdoor testing, detailed energy analysis, or wireless data integration, which would be necessary for large-scale deployment. These aspects, along with environmental robustness and communication reliability assessments, are identified as directions for future development. As for future implementation, this system can be extended to consist of several Arduino boards and ultrasonic sensors. One Arduino and several sensors can cover each section of the parking lot. The number of ultrasonic sensors can be increased to cover the whole parking space. Despite validating the current system’s reliability, certain limitations warrant consideration. We can utilize multiple sensors and cameras to bridge the existing research gap. In addition, the potential use of artificial intelligence must also be taken into account. In future implementations, the system can be further enhanced by incorporating dynamic slot allocation and real-time wireless synchronization between multiple parking levels to ensure efficient operation in large-scale facilities. The present study focused on validating the core functionality of the proposed automated parking system at prototype scale. A detailed bill of materials, power budget, enclosure design, and installation tolerance analysis were therefore beyond the current scope. These aspects, together with large-scale field testing and energy efficiency evaluation, will be considered in future work aimed at full-scale deployment and quantitative assessment of smart city benefits.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data can be made available upon request to the corresponding author.
Acknowledgments
The author would like to convey their honest appreciation to Belaid Boukenna, Asma Musabah Mohammed Al Kaabi, and Muna Mohammed Ali Al-Balushi for their substantial efforts in the advancement of this particular work. Their attempts and commitment performed an important role in the successful finalization of the system.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Bimpas, A.; Violos, J.; Leivadeas, A.; Varlamis, I. Leveraging pervasive computing for ambient intelligence: A survey on recent advancements, applications and open challenges. Comput. Netw. 2024, 239, 110156. [Google Scholar] [CrossRef]
- Shaygan, M.; Meese, C.; Li, W.; Zhao, X.G.; Nejad, M. Traffic prediction using artificial intelligence: Review of recent advances and emerging opportunities. Transp. Res. Part C Emerg. Technol. 2022, 145, 103921. [Google Scholar] [CrossRef]
- Shen, T.; Hong, Y.; Thompson, M.M.; Liu, J.; Huo, X.; Wu, L. How does parking availability interplay with the land use and affect traffic congestion in urban areas? The case study of Xi’an, China. Sustain. Cities Soc. 2020, 57, 102126. [Google Scholar] [CrossRef]
- Al-Turjman, F.; Malekloo, A. Smart parking in IoT-enabled cities: A survey. Sustain. Cities Soc. 2019, 49, 101608. [Google Scholar] [CrossRef]
- Cookson, G. Smart Parking—A Silver Bullet for Parking Pain. 2017. Available online: https://inrix.com/blog/parkingsurvey/ (accessed on 1 July 2017).
- Šolić, P.; Perković, T.; Konsa, T.; Zargariasl, H.; Patrono, L. Smart parking sensor performance evaluation. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019; pp. 1–6. [Google Scholar]
- Lin, T.; Rivano, H.; Le Mouël, F. A survey of smart parking solutions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3229–3253. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Simske, S.; Treiblmaier, H.; Zailani, S. The big picture on the internet of things and the smart city: A review of what we know and what we need to know. Internet Things 2022, 19, 100565. [Google Scholar] [CrossRef]
- Mohandes, M.; Deriche, M.; Abuelma’Atti, M.T.; Tasadduq, N. Preference-based smart parking system in a university campus. IET Intell. Transp. Syst. 2019, 13, 417–423. [Google Scholar] [CrossRef]
- Soni, L.; Kaur, A. Solving Parking Problems with Arduino Smart Car Parking Systems. In Proceedings of the 2023 5th International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 3–5 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1705–1710. [Google Scholar]
- Nikhar, M.; Kamath, S. IoT-Based E-Parking System for Multiplexes and Shopping Malls. In Proceedings of the Fourth International Conference on Communication, Computing and Electronics Systems: ICCCES 2022, Coimbatore, India, 15–16 September 2022; Springer: Berlin/Heidelberg, Germany, 2023; pp. 81–89. [Google Scholar]
- Jabbar, W.A.; Tiew, L.Y.; Shah, N.Y.A. Internet of things enabled parking management system using long range wide area network for smart city. Internet Things Cyber-Phys. Syst. 2024, 4, 82–98. [Google Scholar] [CrossRef]
- Kumar, R.; Chilamkurti, N.K.; Soh, B. A comparative study of different sensors for smart car park management. In Proceedings of the 2007 International Conference on Intelligent Pervasive Computing (IPC 2007), Jeju Island, Republic of Korea, 11–13 October 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 499–502. [Google Scholar]
- Bachani, M.; Qureshi, U.M.; Shaikh, F.K. Performance analysis of proximity and light sensors for smart parking. Procedia Comput. Sci. 2016, 83, 385–392. [Google Scholar] [CrossRef]
- Jo, K.-H. Cumulative dual foreground differences for illegally parked vehicles detection. IEEE Trans. Ind. Inform. 2017, 13, 2464–2473. [Google Scholar]
- Ruili, J.; Haocong, W.; Han, W.; O’Connell, E.; McGrath, S. Smart parking system using image processing and artificial intelligence. In Proceedings of the 2018 12th International Conference on Sensing Technology (ICST), Limerick, Ireland, 4–6 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 232–235. [Google Scholar]
- Bura, H.; Lin, N.; Kumar, N.; Malekar, S.; Nagaraj, S.; Liu, K. An edge based smart parking solution using camera networks and deep learning. In Proceedings of the 2018 IEEE international conference on cognitive computing (ICCC), San Francisco, CA, USA, 2–7 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 17–24. [Google Scholar]
- Ke, R.; Zhuang, Y.; Pu, Z.; Wang, Y. A smart, efficient, and reliable parking surveillance system with edge artificial intelligence on IoT devices. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4962–4974. [Google Scholar] [CrossRef]
- Sudhakar, M.V.; Reddy, A.A.; Mounika, K.; Kumar, M.S.; Bharani, T. Development of smart parking management system. Mater. Today: Proc. 2023, 80, 2794–2798. [Google Scholar] [CrossRef]
- Tang, V.W.; Zheng, Y.; Cao, J. An intelligent car park management system based on wireless sensor networks. In Proceedings of the 2006 First International Symposium on Pervasive Computing and Applications, Urumqi, China, 3–5 August 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 65–70. [Google Scholar]
- Jatuporn, C.; Udomporn, S.; Satien, T. Smart parking: An application of optical wireless sensor network. In Proceedings of the 2007 International Symposium on Applications and the Internet Workshops, Hiroshima, Japan, 15–19 January 2007. [Google Scholar]
- Yan, G.; Yang, W.; Rawat, D.B.; Olariu, S. SmartParking: A secure and intelligent parking system. IEEE Intell. Transp. Syst. Mag. 2011, 3, 18–30. [Google Scholar] [CrossRef]
- Yang, J.; Portilla, J.; Riesgo, T. Smart parking service based on wireless sensor networks. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 6029–6034. [Google Scholar]
- Patil, M.; Bhonge, V.N. Wireless sensor network and RFID for smart parking system. Int. J. Emerg. Technol. Adv. Eng. 2013, 3, 188–192. [Google Scholar]
- Grodi, R.; Rawat, D.B.; Rios-Gutierrez, F. Smart parking: Parking occupancy monitoring and visualization system for smart cities. In Proceedings of the SoutheastCon 2016, Norfolk, VA, USA, 30 March–3 April 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Alkheder, S.A.; Al Rajab, M.M.; Alzoubi, K. Parking problems in Abu Dhabi, UAE toward an intelligent parking management system “ADIP: Abu Dhabi Intelligent Parking”. Alex. Eng. J. 2016, 55, 2679–2687. [Google Scholar] [CrossRef]
- Rodriguez, A.; Alonso, B.; Moura, J.L.; dell’Olio, L. Analysis of user behavior in urban parking under different level of information scenarios provided by smart devices or connected cars. Travel Behav. Soc. 2024, 37, 100847. [Google Scholar] [CrossRef]
- Jeong, S.; Choi, C.; Oh, J.; Yoon, P.; Kim, B.; Kim, M.; Lee, K. Low cost design of parallel parking assist system based on an ultrasonic sensor. Int. J. Automot. Technol. 2010, 11, 409–416. [Google Scholar] [CrossRef]
- Wu, T.-F.; Tsai, P.-S.; Hu, N.-T.; Chen, J.-Y. Research and implementation of auto parking system based on ultrasonic sensors. In Proceedings of the 2016 International Conference on Advanced Materials for Science and Engineering (ICAMSE), Tainan, Taiwan, 12–13 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 643–645. [Google Scholar]
- Zadeh, N.R.N.; Cruz, J.C.D. Smart urban parking detection system. In Proceedings of the 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–26 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 370–373. [Google Scholar]
- Jindaprakai, N.; Nuchitprasitchai, S. Intelligent parking system using multiple sensor detection. In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bangkok, Thailand, 11–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Mansour, M.B.M.; Said, A.; Ahmed, N.E.; Sallam, S. Autonomous parallel car parking. In Proceedings of the 2020 Fourth World Conference on Smart Trends in Systems, Security and Sustainability (WorldS4), Online/Virtual, 27–28 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 392–397. [Google Scholar]
- Allbadi, Y.; Shehab, J.N.; Jasim, M.M. The smart parking system using ultrasonic control sensors. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Suzhou, China, 17–19 March 2021; IOP Publishing: Bristol, UK, 2021; p. 012064. [Google Scholar]
- Jabbar, W.A.; Wei, C.W.; Azmi, N.A.A.M.; Haironnazli, N.A. An IoT Raspberry Pi-based parking management system for smart campus. Internet Things 2021, 14, 100387. [Google Scholar] [CrossRef]
- Xiang, Z.; Pan, J. Design of intelligent parking management system based on ARM and wireless sensor network. Mob. Inf. Syst. 2022, 2022, 2965638. [Google Scholar] [CrossRef]
- Veeramanickam, M.; Venkatesh, B.; Bewoor, L.A.; Bhowte, Y.W.; Moholkar, K.; Bangare, J.L. IoT based smart parking model using Arduino UNO with FCFS priority scheduling. Meas. Sens. 2022, 24, 100524. [Google Scholar] [CrossRef]
- Sobti, J.; Dixit, K.K.; Alkhayyat, A.; Pant, S.; Kaur, H.; Anand, R. Parking Wireless Assistive System for Smart City Parking Management. In Proceedings of the 2024 IEEE Wireless Antenna and Microwave Symposium (WAMS), Visakhapatnam, India, 29 February–3 March 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar]
- Tedeschi, A.; Calcaterra, S.; Benedetto, F. Ultrasonic RAdar system (URAS): Arduino and virtual reality for a light-free mapping of indoor environments. IEEE Sens. J. 2017, 17, 4595–4604. [Google Scholar] [CrossRef]
- Perković, T.; Šolić, P.; Zargariasl, H.; Čoko, D.; Rodrigues, J.J. Smart parking sensors: State of the art and performance evaluation. J. Clean. Prod. 2020, 262, 121181. [Google Scholar] [CrossRef]
- Vastava, S.S.S.; Vandana, B.; Bhavana, M.; Gongati, R. Automatic movable road divider using Arduino UNO with Node Micro Controller Unit (MCU). Mater. Today Proc. 2023, 80, 1842–1845. [Google Scholar] [CrossRef]
- SrirengaNachiyar, V.; Chandralekha, R.; Shriram, S.; Parthipan, J. A Car Parking Guidance System to Lessen the Traffic in the Parking Lot using Arduino. In Proceedings of the 2024 4th International Conference on Pervasive Computing and Social Networking (ICPCSN), Salem, India, 3–4 May 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 758–761. [Google Scholar]
- Jameco. How Servo Motors Work. Available online: https://www.jameco.com/Jameco/workshop/Howitworks/how-servo-motors-work.html?srsltid=AfmBOooOP_oRBUMn6HT_omCJprFynsqkcLgcqP3rDZCtP-SMJWenoVS1 (accessed on 1 July 2017).







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).