
Image Reconstruction in Ultrasonic Speed-of-Sound Computed Tomography Using Time of Flight Estimated by a 2D Convolutional Neural Networks

Abstract
1. Introduction
2. Materials and Methods
2.1. Mathematical Modeling
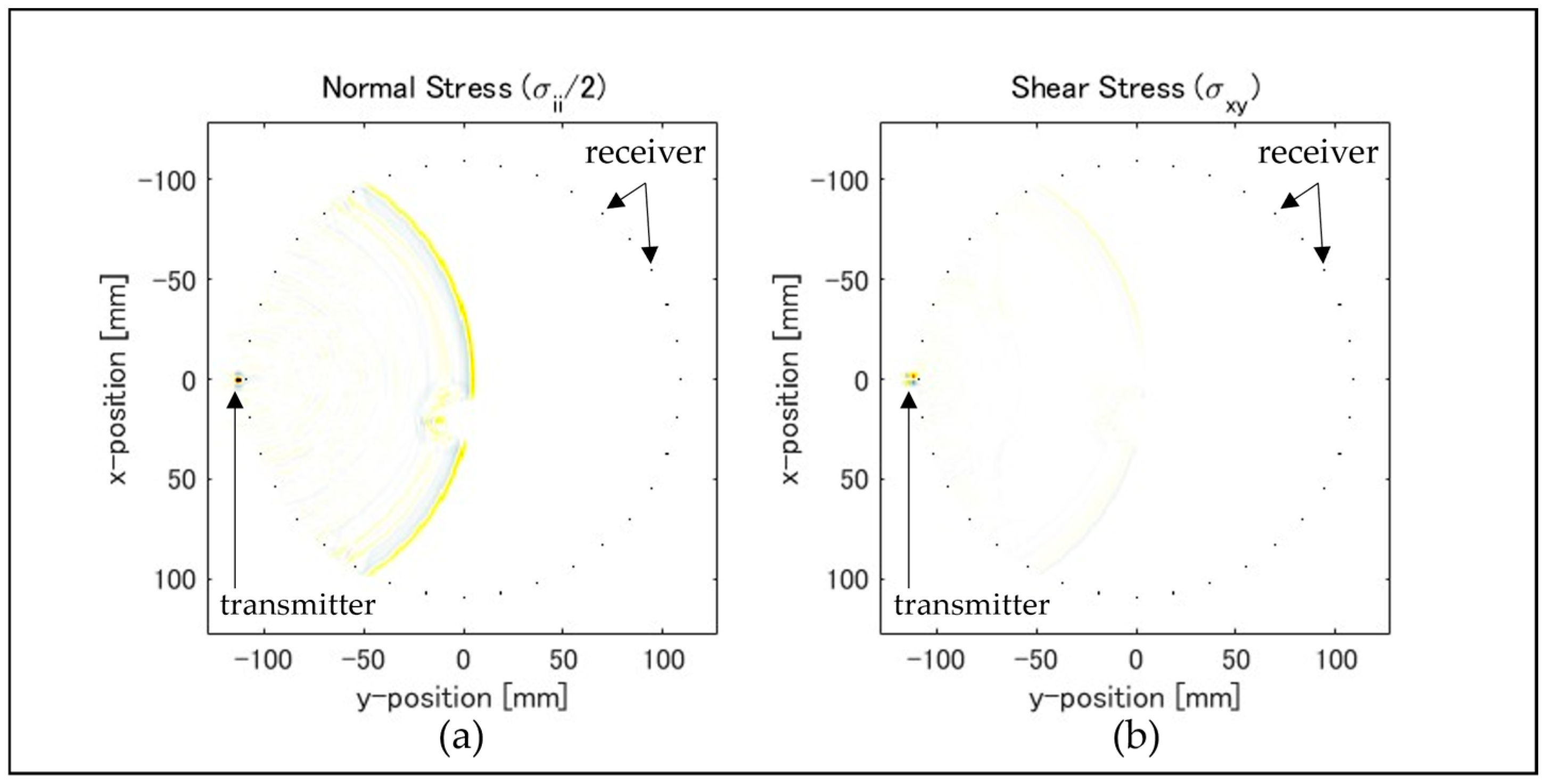
2.2. Ultrasonic Propagation Simulation
2.3. Datasets
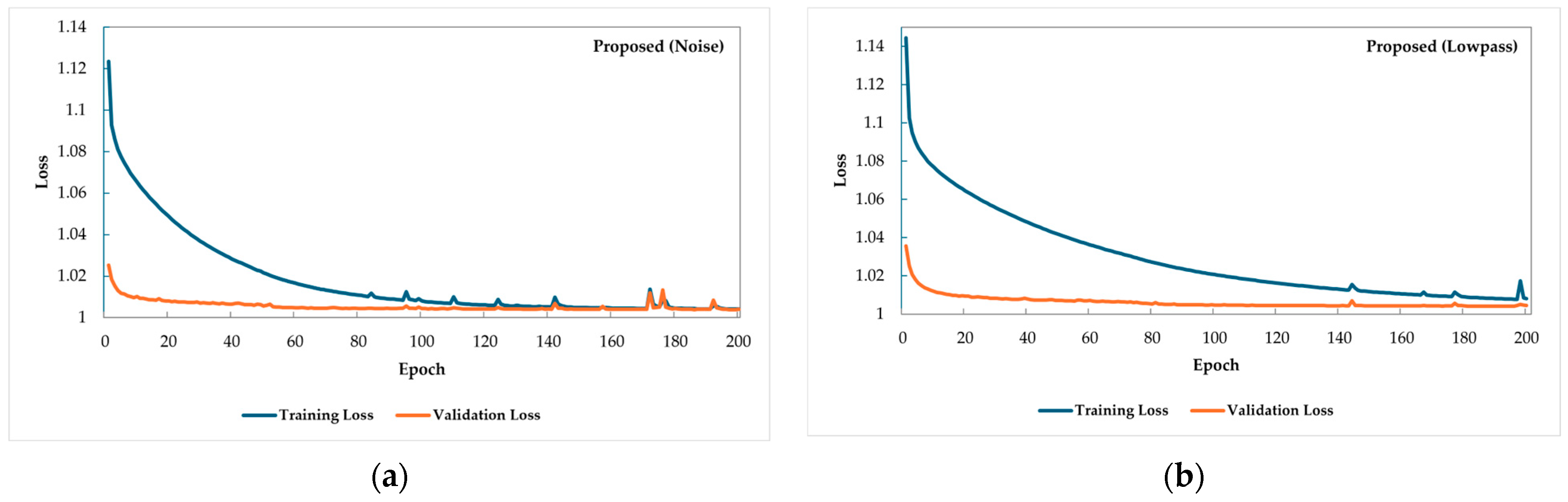
2.4. Network Design
2.5. Signal Processing Methods and Evaluation Methods
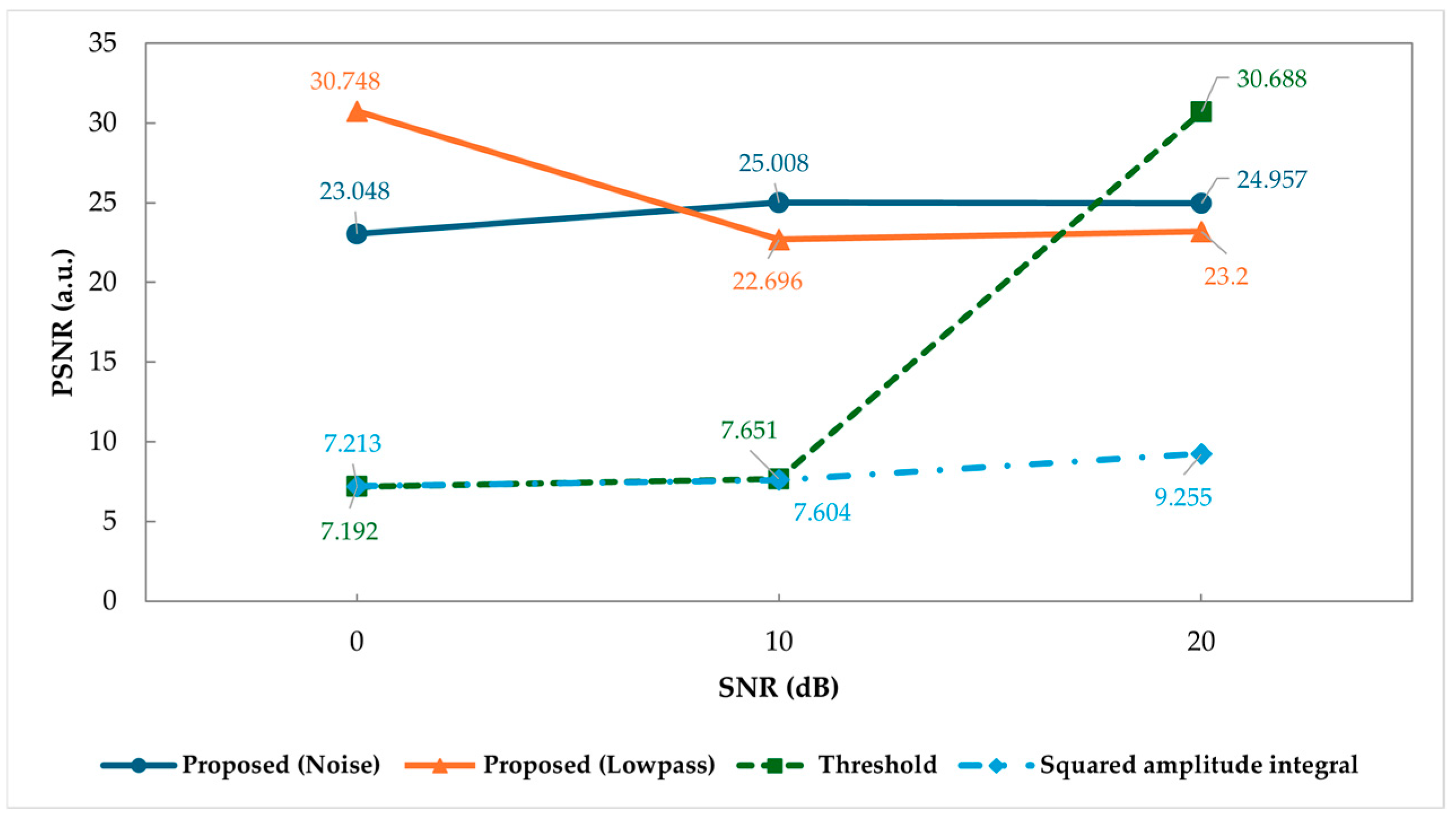
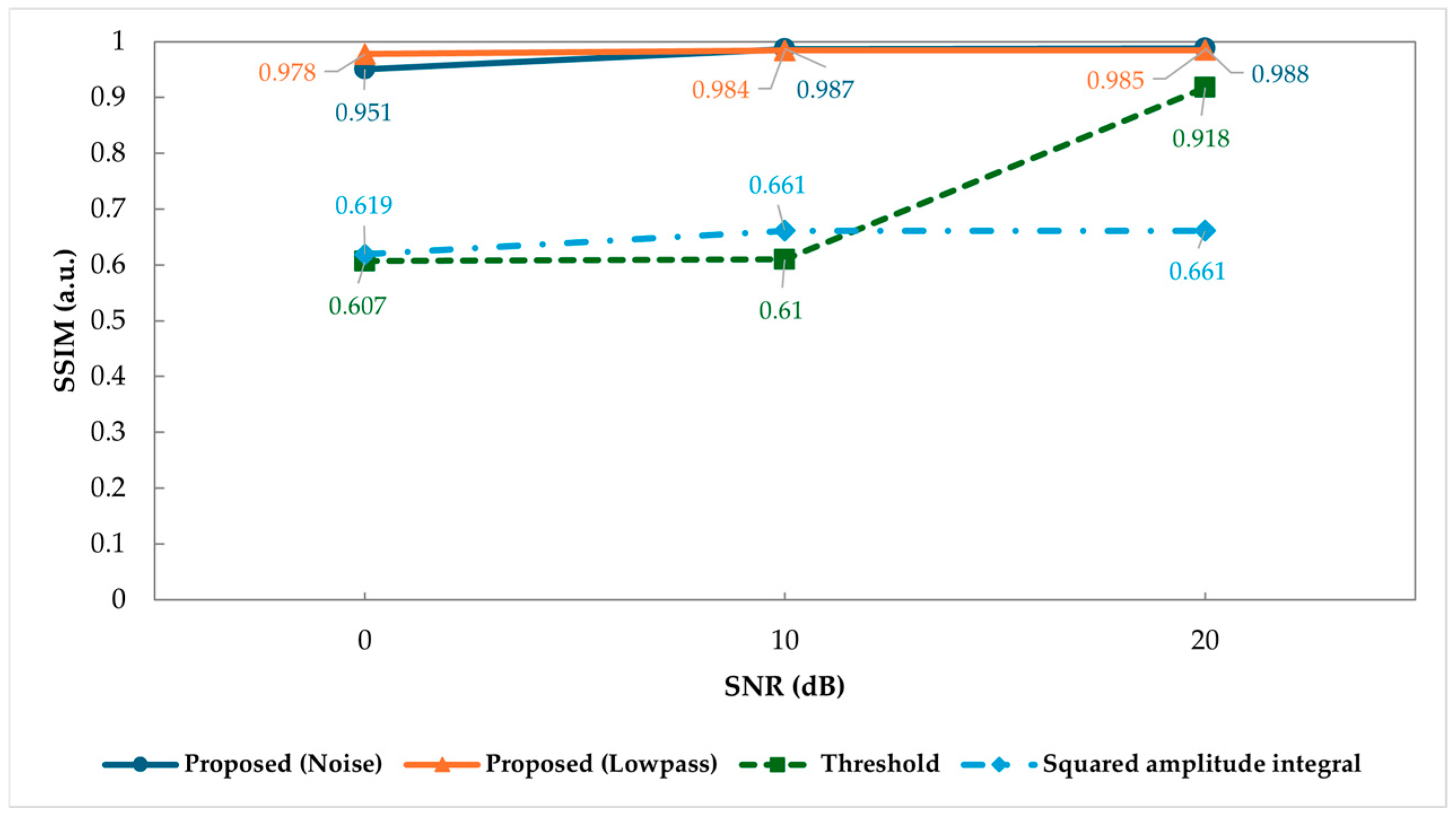
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Y.; Wang, S.; Zhang, P.; Xu, T.; Zhuo, J. Application of Nondestructive Testing Technology in Quality Evaluation of Plain Concrete and RC Structures in Bridge Engineering: A Review. Buildings 2022, 12, 843. [Google Scholar] [CrossRef]
- Khalili, P.; Cawley, P. The choice of ultrasonic inspection method for the detection of corrosion at inaccessible locations. NDT E Int. 2018, 99, 80–92. [Google Scholar] [CrossRef]
- Schabowicz, K. Modern acoustic techniques for testing concrete structures accessible from one side only. Arch. Civ. Mesh. Eng. 2015, 15, 1149–1159. [Google Scholar] [CrossRef]
- Reddy, M.U.; Filly, A.R.; Copel, A.J. Prenatal Imaging: Ultrasonography and Magnetic Resonance Imaging. Obset. Gynecol. 2008, 112, 145–157. [Google Scholar] [CrossRef] [PubMed]
- Tomikawa, Y.; Iwase, Y.; Arita, K.; Yamada, H. Non-Destructive Inspection of Rotted or Termite Damaged Wooden Poles by Ultrasound. Jpn. J. Appl. Phys. 1985, 24, 187. [Google Scholar] [CrossRef]
- Yanagida, H.; Tamura, Y.; Kim, K.M.; Lee, J.J. Development of ultrasonic time-of-flight computed tomography for hard wood with anisotropic acoustic property. Jpn. J. Appl. Phys. 2007, 46, 5321–5325. [Google Scholar] [CrossRef]
- Fan, H.; Yanagida, H.; Tamura, Y.; Guo, S.; Saitoh, T.; Takahashi, T. Image quality improvement of ultrasonic computed tomography on the basis of maximum likelihood expectation maximization algorithm considering anisotropic acoustic property and time-of-flight interpolation. Jpn. J. Appl. Phys. 2010, 49, 07HC12-1–07HC12-6. [Google Scholar] [CrossRef]
- Fujii, H.; Adachi, K.; Yanagida, H.; Hoshino, T.; Nishiwaki, T. Improvement of the Method for Determination of Time-of-Flight of Ultrasound in Ultrasonic TOF CT. SICE J. Control. Meas. Syst. Integr. 2015, 8, 363–370. [Google Scholar] [CrossRef]
- Nogami, K.; Yamada, A. Evaluation experiment of ultrasound computed tomography for the abdominal sound speed imaging. Jpn. J. Appl. Phys. 2007, 46, 4820–4826. [Google Scholar] [CrossRef]
- Queirós, R.; Alegria, F.C.; Girão, P.S.; Serra, A.C. Cross-correlation and sine-fitting techniques for high resolution ultrasonic ranging. IEEE Trans. Instrum. Meas. 2010, 59, 3227–3236. [Google Scholar] [CrossRef]
- Juan, C.W.; Hu, J.S. Object Localization and Tracking System Using Multiple Ultrasonic Sensors with Newton–Raphson Optimization and Kalman Filtering Techniques. Appl. Sci. 2021, 11, 11243. [Google Scholar] [CrossRef]
- Yang, F.; Shi, D.; Lo, L.Y.; Mao, Q.; Zhang, J.; Lam, K.H. Auto-Diagnosis of Time-of-Flight for Ultrasonic Signal Based on Defect Peaks Tracking Model. Remote Sens. 2023, 15, 599. [Google Scholar] [CrossRef]
- Lu, Z.; Ma, F.; Yang, C.; Chang, M. A novel method for Estimating Time of Flight of ultrasonic echoes through short-time Fourier transforms. Ultrasonics 2020, 103, 106104. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Demirli, R.; Cardoso, G.; Saniie, J. A successive parameter estimation algorithm for chirplet signal decomposition. IEEE Trans. Ultrason. Ferroelect. Freq. Contr. 2006, 53, 2121–2131. [Google Scholar] [CrossRef] [PubMed]
- Cowell, D.M.J.; Freear, S. Separation of overlapping linear frequency modulated (LFM) signals using the fractional Fourier transform. IEEE Trans. Ultrason. Ferroelect. Freq. Contr. 2010, 57, 2324–2333. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.; Huang, Z.Y.; Pei, W.Q. Sparse deconvolution method for improving the time-resolution of ultrasonic NDE signals. NDT E Int. 2009, 42, 430–434. [Google Scholar] [CrossRef]
- Purwins, H.; Li, B.; Virtanen, T.; Schluter, J.; Chang, S.Y.; Sainath, T. Deep learning for audio signal processing. IEEE J. Sel. Top. Sign. Proces. 2019, 13, 206–219. [Google Scholar] [CrossRef]
- Xu, Y.; Du, J.; Dai, L.R.; Lee, C.H. A regression approach to speech enhancement based on deep neural networks. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 23, 430–434. [Google Scholar] [CrossRef]
- Rethage, D.; Pons, J.; Serra, X. A wavenet for speech denoising. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 5069–5073. [Google Scholar]
- Li, Z.; Wu, T.; Zhang, W.; Gao, X.; Yao, Z.; Li, Y.; Shi, Y. A study on determining time-of-flight difference of overlapping ultrasonic signal: Wave-transform network. Sensors 2020, 20, 5140. [Google Scholar] [CrossRef]
- Shpigler, A.; Mor, E.; Bar, H.A. Detection of overlapping ultrasonic echoes with deep neural networks. Ultrasonics 2022, 119, 106598. [Google Scholar] [CrossRef]
- Shi, Y.; Xu, W.; Zhang, J.; Li, X. Automated Classification of Ultrasonic Signal via a Convolutional Neural Network. Appl. Sci. 2022, 12, 4179. [Google Scholar] [CrossRef]
- Ross, Z.E.; Meier, M.A.; Hauksson, E. P Wave Arrival Picking and First-Motion Polarity Determination With Deep Learning. JGR Solid Earth 2018, 123, 5120–5129. [Google Scholar] [CrossRef]
- Treeby, B.E.; Cox, B.T.; Jaros, J. k-Wave User Manual. Available online: http://www.k-wave.org/manual/k-wave_user_manual_1.1.pdf (accessed on 8 May 2024).
- Treeby, B.E.; Jaros, J.; Rohrbach, D.; Cox, B.T. Modeling Elastic Wave Propagation Using the k-Wave MATLAB Toolbox. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 146–149. [Google Scholar]
- Berenger, J.P. A perfectly matched layer for the absorption of electromagnetic waves. J. Comput. Phys. 1994, 114, 185–200. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing System 25 (NIPS 2012), Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Dumoulin, V.; Visin, F. A guide to convolution arithmetic for deep learning. arXiv 2018, arXiv:1603.07285. [Google Scholar] [CrossRef]
- Hore, A.; Ziou, D. Image Quality Metrics: PSNR vs. SSIM. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 2366–2369. [Google Scholar] [CrossRef]
- Wang, Z.; Bovilk, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Img. Proc. 2004, 13, 600–612. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target radius (mm) | 110 |
| Anomaly radius (mm) | 10, 20 |
| Center frequency (kHz) | 200 |
| Number of transmitters | 1 |
| Number of receivers | 64 |
| Bandwidth limitation (kHz) | 180~220 |
| Background | Normal Part | Anomaly Part | |
|---|---|---|---|
| Longitudinal wave speed (m/s) | 340 | 2200 | 340 |
| Transverse wave speed (m/s) | 0 | 1000 | 0 |
| Density (kg/m3) | 129.3 | 400 | 1.293 |
| cm) | 10 | 0.1 | 10 |
| cm) | 10 | 0.1 | 10 |
| Layer | Stage | Filter Size | Channel |
|---|---|---|---|
| 1 | Convolution2d, Instance Normalization, ReLU | (25, 101) | 32 |
| 2 | Convolution2d, Instance Normalization, ReLU | (13, 53) | 64 |
| 3 | Convolution2d, Instance Normalization, ReLU | (7, 29) | 128 |
| 4 | Deconvolution2d, Instance Normalization, ReLU | (7, 29) | 64 |
| 5 | Deconvolution2d, Instance Normalization, ReLU | (13, 53) | 32 |
| 6 | Deconvolution2d, Sigmoid | (25, 101) | 1 |
| Methods/SNR | 0 dB | 10 dB | 20 dB |
|---|---|---|---|
| Proposed Noise | 68.5 | 3.5 | 3 |
| Proposed Lowpass | 13 | 4 | 3.5 |
| Threshold | 114 | 113 | 55.5 |
| Squared Amplitude Integral | 113 | 113 | 69.5 |
| Methods/SNR | 0 dB | 10 dB | 20 dB |
|---|---|---|---|
| Proposed Noise | 0.421 | 0.331 | 0.328 |
| Proposed Lowpass | 0.434 | 0.383 | 0.373 |
| Threshold | 67.6 | 58.8 | 2.36 |
| Squared Amplitude Integral | 68.8 | 68.3 | 23.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mimura, Y.; Suzuki, Y.; Sugimoto, T.; Saitoh, T.; Takahashi, T.; Yanagida, H. Image Reconstruction in Ultrasonic Speed-of-Sound Computed Tomography Using Time of Flight Estimated by a 2D Convolutional Neural Networks. Technologies 2024, 12, 129. https://doi.org/10.3390/technologies12080129
Mimura Y, Suzuki Y, Sugimoto T, Saitoh T, Takahashi T, Yanagida H. Image Reconstruction in Ultrasonic Speed-of-Sound Computed Tomography Using Time of Flight Estimated by a 2D Convolutional Neural Networks. Technologies. 2024; 12(8):129. https://doi.org/10.3390/technologies12080129
Chicago/Turabian StyleMimura, Yuki, Yudai Suzuki, Toshiyuki Sugimoto, Tadashi Saitoh, Tatsuhisa Takahashi, and Hirotaka Yanagida. 2024. "Image Reconstruction in Ultrasonic Speed-of-Sound Computed Tomography Using Time of Flight Estimated by a 2D Convolutional Neural Networks" Technologies 12, no. 8: 129. https://doi.org/10.3390/technologies12080129
APA StyleMimura, Y., Suzuki, Y., Sugimoto, T., Saitoh, T., Takahashi, T., & Yanagida, H. (2024). Image Reconstruction in Ultrasonic Speed-of-Sound Computed Tomography Using Time of Flight Estimated by a 2D Convolutional Neural Networks. Technologies, 12(8), 129. https://doi.org/10.3390/technologies12080129