1. Introduction
The classification of electromyographic (EMG) signals corresponding to movement is a fundamental task in biomedical engineering and has been widely studied in recent years. EMG signals are electrical records of muscle activity that contain valuable information about muscle contraction and relaxation patterns. The accurate classification of these signals is essential for various applications, such as EMG-controlled prosthetics, rehabilitation, and the monitoring of muscle activity [
1].
One recently used method to classify EMG signals is the multilayer perceptron (MLP). This artificial neural network architecture has proven effective in signal processing and pattern classification. An MLP consists of several layers of interconnected neurons, each activated by a non-linear function. These layers include an input layer, one or more hidden layers, and an output layer. Although MLPs are suitable for the classification of EMG signals, their performance is strongly affected by the choice of hyperparameters. Hyperparameters are configurable values that are not learned directly from the dataset but do define the behavior and performance of the model. Some examples of hyperparameters in the MLP context are as follows [
2,
3,
4]:
Number of neurons in hidden layers: This hyperparameter determines the generalization power of the model. Too few neurons leads to underfitting, while too many leads to overfitting.
Learning rate: This factor determines how much the network weights are adjusted during the learning process. A high learning rate prevents the model from converging, while a low learning rate slows the training process.
Training periods: This indicates the number of times that the network weights were updated during training using the complete dataset. An insufficient number of epochs leads to the undertraining of the model, while too many epochs leads to overtraining.
Training batch size: The number of training samples to use each time that the weights are updated. The batch size affects the stability of the training process and the speed of convergence of the model.
Traditionally, hyperparameter selection has involved a trial-and-error process of exploring different combinations of values to determine the best performance. However, this approach is time-consuming and computationally intensive, especially with a large search space. Automated hyperparameter search methods have been developed to address this problem [
5]. In this context, it is proposed to use the particle swarm optimization (PSO) and gray wolf optimization (GWO) algorithms to select the hyperparameters of the MLP model automatically. These metaheuristic optimization algorithms effectively find the optimal solution in a given search space.
PSO and GWO work similarly, generating an initial set of possible solutions and iteratively updating them based on their performance. Each solution is a combination of MLP hyperparameters. The objective of these algorithms is to find the combination of hyperparameters that maximizes the performance of the MLP model in the classification of EMG signals [
6].
The performed experiments show that hyperparameter optimization significantly improves the performance of MLP models in classifying EMG signals. The optimized MLP model achieved a classification accuracy of 93% in the validation phase, which is promising. The main motivations of this work are the following.
Comparison of algorithms: The main objective of this study is to compare and analyze the selection of hyperparameters using metaheuristic algorithms. The PSO algorithm, one of the most popular, was implemented and compared with the GWO algorithm, which is relatively new. This comparison allows us to evaluate both algorithms’ performance and efficiency in selecting hyperparameters in the context of the classification of EMG signals.
Exploration of new possibilities: Although the PSO and GWO optimization algorithms have been widely used for feature selection in EMG signals, their application to optimize classifiers has yet to be fully explored. This study seeks to address this gap and examine the effectiveness of metaheuristic algorithms in improving rankings.
The current work is structured as follows.
Section 2 provides a comprehensive literature review, offering insights into the proposed work. In
Section 3, the methods and definitions essential for the development of the project are outlined.
Section 4 presents the sequential steps to be followed in order to implement the proposed algorithm. The results and discoveries obtained are presented in
Section 5.
Section 6 presents the interpretation of the results from the perspective of previous studies and working hypotheses. Lastly, the areas covered by the scope of this work are presented in
Section 7.
2. Related Works
In signal processing, particularly electromyography, various approaches have been proposed to enhance the accuracy of pattern recognition models. In 2018, Purushothaman et al. [
7] introduced an efficient pattern recognition scheme for the control of prosthetic hands using EMG signals. The study utilized eight EMG channels from eight able-bodied subjects to classify 15 finger movements, aiming for optimal performance with minimal features. The EMG signals were preprocessed using a dual-tree complex wavelet transform. Subsequently, several time-domain features were extracted, including zero crossing, slope sign change, mean absolute value, and waveform length. These features were chosen to capture relevant information from the EMG signals.
The results demonstrated that the naive Bayes classifier and ant colony optimization achieved average precision of 88.89% in recognizing the 15 different finger movements using only 16 characteristics. This outcome highlights the effectiveness of the proposed approach in accurately classifying and controlling prosthetic hands based on EMG signals.
On the other hand, in 2019, Too et al. [
8] proposed the use of Pbest-guide binary particle swarm optimization to select relevant features from EMG signals decomposed by a discrete wavelet transform, managing to reduce the features by more than 90% while maintaining average classification accuracy of 88%. Moreover, Sui et al. [
9] proposed the use of the wavelet package to decompose the EMG signal and extract the energy and variance of the coefficients as feature vectors. They combined PSO with an enhanced support vector machine (SVM) to build a new model, achieving an average recognition rate of 90.66% and reducing the training time by 0.042 s.
In 2020, Kan et al. [
10] proposed an EMG pattern recognition method based on a recurrent neural network optimized by the PSO algorithm, obtaining classification accuracy of 95.7%.
One year later, in 2021, Bittibssi et al. [
11] implemented a recurrent neural network model based on long short-term memory, Convolution Peephole LSTM, and a gated recurrent unit to predict movements from sEMG signals. Various techniques were evaluated and applied to six reference datasets, obtaining prediction accuracy of almost 99.6%. In the same year, Li et al. [
12] developed a scheme to classify 11 movements using three feature selection methods and four classification methods. They found that the TrAdaBoost-based incremental SVM method achieved the highest classification accuracy. The PSO method achieved classification accuracy of 93%.
Moreover, Cao et al. [
13] proposed an sEMG gesture recognition model that combines feature extraction, genetic algorithm, and a support vector machine model with a new adaptive mutation particle swarm optimization algorithm to optimize the SVM parameters, achieving a recognition rate of 97.5%.
In 2022, Aviles et al. [
14] proposed a methodology to classify upper and lower extremity electromyography (EMG) signals using feature selection GA. Their approach yielded average classification efficiency exceeding 91% using an SVM model. The study aimed to identify the most informative features for accurate classification by employing GA in feature selection.
Subsequently, Dhindsa et al. [
15] utilized a feature selection technique based on binary particle swarm optimization to predict knee angle classes from surface EMG signals. The EMG signals were segmented, and twenty features were extracted from each muscle. These features were input into a support vector machine classifier for the classification task. The classification accuracy was evaluated using a reduced feature set comprising only 30% of the total features, to reduce the computational complexity and enhance efficiency. Remarkably, this reduced feature set achieved accuracy of 90.92%, demonstrating the effectiveness of the feature selection technique in optimizing the classification performance.
Finally, in 2022, Li et al. [
16] proposed a lower extremity movement pattern recognition algorithm based on the Improved Whale Algorithm Optimized SVM model. They used surface EMG signals as input to the movement pattern recognition system, and movement pattern recognition was performed by combining the IWOA-SVM model. The results showed that the recognition accuracy was 94.12%.
3. Materials and Methods
This section shows the essential concepts applied in this work.
3.1. EMG Signals
An EMG signal is a bioelectric signal produced by muscle activity. When a muscle contracts, the muscle fibers are activated, generating an electrical current measured with surface electrodes. The recorded EMG signal contains information about muscle activity, such as force, movement, and fatigue. The EMG signal has a low amplitude, typically ranging from 0.1 mV to 10 mV. It is important to pre-process the signal to remove noise and amplify it before performing any analysis. Furthermore, the location of the electrodes on the muscle surface is crucial to obtain accurate and consistent EMG signals [
17,
18].
In the context of movement classification using EMG signals, movements made by a subject are recorded by surface electrodes placed on the skin over the muscles involved. The resulting EMG signals are processed to extract relevant features and train a classification model. Artifacts, such as unintentional electrode movements or electromagnetic interference, affect the quality of the EMG signals and reduce the accuracy of the classification model. Therefore, steps must be taken to ensure that the EMG signals are as clean and accurate as possible [
17,
19].
3.2. Multilayer Perceptron
The MLP is an artificial neural network for supervised learning tasks such as classification and regression. It is a feedforward network composed of several layers of interconnected neurons. Each neuron receives weighted inputs and applies a nonlinear activation function to produce an output. The backpropagation algorithm is commonly used to adjust the weights of the connections between neurons. This iterative process minimizes the error between the output of the network and the expected output based on a given training dataset [
4,
20].
The MLP consists of an input layer, a hidden layer, and an output layer. The input layer receives input features and forwards them to the hidden layer, and the hidden layer processes the features and passes them to the output layer. The output layer produces the final output, a classification result. The specific architecture of the MLP, including the number of neurons in each layer and the number of hidden layers, depends on the task and the input data [
4,
20]. Below, in the pseudocode in Algorithm 1, the MLP algorithm is presented.
Note that the following pseudocode assumes that the weight matrices and bias vectors have already been initialized and altered by a suitable algorithm and that the activation function
has been chosen. The algorithm then takes an input vector
x and passes it through the MLP to produce an output vector
y. The intermediate variables
and
are the input and output of each hidden layer, respectively. The activation function
is usually a non-linear function that allows the MLP to learn complex mappings between inputs and outputs.
| Algorithm 1 Multilayer Perceptron |
- 1:
Input: Input vector x, weight matrices and bias vectors , number of hidden layers L, activation function - 2:
Output: Output vector y - 3:
for to L do - 4:
if then - 5:
- 6:
else - 7:
- 8:
- 9:
|
3.3. Particle Swarm Optimization and Gray Wolf Optimizer
The PSO algorithm is an optimization method inspired by observing the collective behavior of a swarm of particles. Each particle represents a solution in the search space and moves based on its own experience and the experience of the swarm in general. The goal is to find the best possible solution to an optimization problem [
21,
22].
The PSO algorithm has proven effective in optimizing complex problems in various areas, including machine learning. This work uses PSO to optimize the hyperparameters of a multilayer perceptron in the classification of EMG signals. The pseudocode in Algorithm 2 shows the PSO algorithm [
21].
| Algorithm 2 Particle Swarm Optimization |
- 1:
Input: Number of particles N, maximum number of iterations , parameters , , , initial positions and velocities - 2:
Output: Global best position and its corresponding fitness value - 3:
Initialize positions and velocities of particles: random, - 4:
for to do - 5:
for each particle do - 6:
Evaluate fitness of current position: fitness function - 7:
if then - 8:
Update personal best position: , - 9:
Find global best position: - 10:
for each particle do - 11:
Update velocity: - 12:
Update position: - 13:
Return: and
|
In the algorithm, a set of parameters that regulate the speed and direction of movement of each particle is used. These parameters are the inertial weight
, the cognitive learning coefficient
, and the social learning coefficient
. The current positions and velocities of the particles are also used, as well as the personal and global best positions found by the entire swarm [
22].
On the other hand, the gray wolf optimizer is an algorithm inspired by the social behavior of gray wolves. This algorithm is based on the social hierarchy and the collaboration between wolves in a pack to find optimal solutions to complex problems. The algorithm starts with an initial population of wolves (candidate solutions) and uses an iterative process to improve these solutions. The positions of wolves are updated during each iteration based on their results, simulating a hunt and pack search. As the algorithm progresses, the wolves adjust their positions based on the quality of their solutions and feedback from the pack leaders. Lead wolves represent the best solutions found so far, and their influence ripples through the pack, helping to converge toward more promising solutions. The GWO has proven to be effective in optimizing complex problems in various areas, such as mathematical function optimization, pattern classification, parameter optimization, and engineering. The pseudocode in Algorithm 3 shows the GWO algorithm [
6].
| Algorithm 3 Gray Wolf Optimizer |
- 1:
Initialize the wolf population (initial solutions) - 2:
Initialize the position vector of the group leader () - 3:
Initialize the position vector of the previous group leader () - 4:
Initialize the iteration counter (t) - 5:
Define the maximum number of iterations () - 6:
while
do - 7:
for each wolf in the population do - 8:
Update the fitness value of the wolf - 9:
Sort the wolves based on their fitness values (from lowest to highest) - 10:
for each wolf in the population do - 11:
for each dimension of the position vector do - 12:
Generate random values (, ) - 13:
Calculate the update coefficient (A) - 14:
Calculate the scale factor (C) - 15:
Update the position of the wolfs - 16:
Increment the iteration counter (t) - 17:
Obtain the wolf with the best fitness value ()
|
3.4. Hyperparameters
A hyperparameter is a parameter that is not learned from the data but is set before training the model. Hyperparameters dictate how the neural network learns and how the model is optimized. Ensuring the appropriate selection of hyperparameters is crucial in achieving the optimal performance of the model (Nematzadeh, 2022) [
23].
When working with MLPs, several critical hyperparameters significantly impact the performance of the model. These include the number of hidden layers, the number of neurons within each layer, the chosen activation function, the learning rate, and the number of training epochs. The numbers of hidden layers and neurons per layer play a crucial role in the capacity of the network to capture intricate functions. Increasing these aspects enables the network to learn complex relationships within the data. However, it may also result in overfitting issues [
3,
24].
The activation function determines the nonlinearity of the network and, therefore, its ability to represent nonlinear functions. The most common activation function is the sigmoid function, but others, such as the ReLU function and the hyperbolic tangent function, are also frequently used [
25].
The learning rate determines how much the network weights are adjusted in each training iteration. If the learning rate is too high, the network starts to oscillate and not converge, while a low learning rate causes the network to converge slowly and become stuck in local minima. The number of training epochs determines how often the entire dataset is processed during training. Too many epochs leads to overfitting, while too few epochs leads to the suboptimality of the model. In this work, the PSO and GWO algorithms are used to find the best values of the hyperparameters of the MLP network [
3,
25].
3.5. Sensitivity Analysis
In order to verify the impact that each of the characteristics selected by genetic algorithm (GA) has on the classification of the EMG signal, a sensitivity analysis is performed. This technique consists of removing one of the predictors during the classification process and recording the accuracy percentage. This is to observe how the output of the model is altered. If the classification percentage decreases, it indicates that the removed feature significantly impacts the prediction [
14]. This procedure is performed once the features have been selected, to assess the importance of the chosen predictors through GA.
The procedure of calculating the sensitivity is as follows. Having a dataset
, the sensitivity of the predictor
i is obtained from a new set
, where the
i th-predictor has been eliminated. The characteristics that make up
are used as a second step, resulting in the precision
. The third step is to use the new feature set
and obtain
. Finally, the sensitivity for the
i-th predictor is
. A tool used to better visualize the sensitivity is the percentage change, which is calculated as
4. Methodology
This section explains how the study was carried out, the procedures used, and how the results were analyzed.
4.1. EMG Data
The dataset used in this study was obtained from [
14] and comprised muscle signals recorded from nine individuals aged between 23 and 27. The dataset included five men and four women without musculoskeletal or nervous system disorders, obesity problems, or amputations. The dataset captured muscle signals during five distinct arm and hand movements: arm flexion at the elbow joint, arm extension at the elbow joint, finger flexion, finger extension, and resting state. The acquisition utilized four bipolar channels and a reference electrode positioned on the dorsal region of the wrist of each participant. During the experimental procedure, the participants were instructed to perform each movement for 6 s, preceded by an initial relaxation period of 2 s. Each action was repeated 20 times to ensure adequate data for analysis. The data were sampled at a frequency of 1.5 kHz, allowing for detailed recordings of the muscle signals during the movements.
The database was divided into two sets. The first one (90%) was used to select the characteristics for the classification and hyperparameters. This first set was subdivided into the training and validation sets, which were used to calculate the objective functions of the metaheuristic algorithms. On the other hand, the second set (10%) was used for the final validation of the classifier. This second set was not presented to the network until the final validation stage, to check the level of generalization of the algorithm.
4.2. Signal Processing
This section explains the filtering process applied to the EMG signals before extracting the features needed for classification. Digital filtering was done using a fourth-order Butterworth filter with a passband ranging from 10 Hz to 500 Hz. This filtering aimed to remove unwanted noise and highlight relevant signals.
It is important to note that the database was subjected to analog filtering from 10 Hz to 500 Hz using a combination of a low-pass filter and a high-pass filter in series. These controllers used the second-order Sallen–Key topology. In addition, a second-order Bainter–Notch band-stop filter was produced to remove the 60 Hz interference generated by the power supply.
4.3. Feature Extraction
The characterization of EMG signals is required for their classification since individual signal values have no practical relevance for classification. Therefore, a feature extraction step is needed to find useful information before extracting the features of the signal. The features are based on the statistical method and are calculated in the time domain. Temporal features are widely used to classify EMG signals due to their low complexity and high computational speed. Moreover, they are calculated directly from the EMG time series.
Table 1 illustrates the characteristics used [
14,
26].
Within the context of EMG signals, the features shown in
Table 1 represent different quantitative aspects generated by muscle activity. The definition or conceptualization of each of these characteristics is presented below [
17].
Average amplitude change: The average amplitude change in the EMG signal over a given time interval. It represents the average variation in the signal amplitude during this period.
where
is the
k-th voltage value that makes up the signal and
N is the number of elements that constitute it.
Average amplitude value: This is the average of the amplitude values of the EMG signal. It indicates the average amplitude level of the signal during a specific time interval.
Difference absolute standard deviation: This is the absolute difference between the standard deviations of two adjacent segments of the EMG signal. It measures extraction and abrupt changes in signal amplitude.
Katz fractals: This refers to the fractal dimension of the EMG signal. It represents the self-similarity and structural complexity of the signal at different scales.
where
L is the total length of the curve or the sum of the Euclidean distances between successive points,
m is the diameter of the curve, and
N is the number of steps in the curve.
Entropy: This measures the randomness and complexity of the EMG signal. The higher the entropy, the greater the harvest and unpredictability of the signal.
where
is the entropy of the random variable
X,
is the probability that
X takes the value
, and
n is the total number of possible values that
X can take.
Kurtosis: This measures the shape of the amplitude distribution of the EMG signal. It indicates the number and concentration of extreme values relative to the mean.
where
N is the size of the dataset,
is the
k-th value of the signal,
is the mean of the data, and
s is the standard deviation of the dataset.
Skewness: This is a measure of the asymmetry of the amplitude distribution of the EMG signal. It describes whether the distribution is skewed to the left or the right relative to the mean.
Mean absolute deviation: This is the average of the absolute deviations of the amplitude values of the EMG signal concerning its mean. It indicates the mean spread of the data around the mean.
Wilson amplitude: This measures the amplitude of the EMG signal to a specific threshold. It represents the muscle force or electrical activity generated by the muscle.
In this study, a threshold L of 0.05 V is considered.
The absolute value of the third moment: This is the absolute value of the third statistical moment of the EMG signal. It is a proportion of information about the symmetry and shape of the amplitude distribution.
The absolute value of the fourth moment: This is the absolute value of the fourth statistical moment of the EMG signal. It describes the concentration and shape of the amplitude distribution.
The absolute value of the fifth moment: This is the absolute value of the fifth statistical moment of the EMG signal. It provides additional information about the shape and amplitude distribution of the signal.
Myopulse percentage rate: This is the average of a series of myopulse outputs, and the myopulse output is 1 if the myoelectric signal is greater than a pre-defined threshold.
where
is defined as
In this work, L is defined as 0.016.
Variance: This measures the dispersion of the amplitude values of the EMG signal to its mean. It indicates the lack of signal around its average value.
Wavelength: This is the average distance between two consecutive zero crossings in the EMG signal. It is the information ratio regarding the frequency and period of the signal.
Zero crossings: This refers to the number of times that the EMG signal crosses the zero value in each time interval. It indicates polarity changes and signal transitions.
where
Log detector: An envelope detector is used to measure the amplitude of the EMG signal on a logarithmic scale. It helps to bring out the most subtle variations in the signal.
Mean absolute value: This is the average of the absolute values of the EMG signal. It represents the average amplitude level of the signal regardless of polarity.
Mean absolute value slope: The average slope of the EMG signal is calculated using the absolute values of the amplitude changes in a specific time interval. It indicates the average rate of change in the signal.
Modified mean absolute value type 1: This is a modified version of the average of the absolute values of the EMG signal. It is used to reduce the effect of higher-frequency components.
where
is defined as
Modified mean value type 2: This is a modified version of the average of the amplitude values of the EMG signal. It is used to reduce the effect of higher-frequency components.
where
is defined as
Root mean square (RMS): This is the square root of the average of the squared values of the EMG signal. It represents a measure of the effective amplitude of the signal.
Slope changes: This refers to the number of slope changes in the EMG signal. It indicates inflection points and changes in the direction of the signal.
where
Simple square integral: This is the integral value of the squares of the EMG signal in a specific time interval. It provides a measure of the energy contained in the signal.
Standard deviation: This measures the dispersion of the amplitude values of the EMG signal for its average. It indicates the variability of the signal around its mean value.
Integrated EMG: This is the integral value of the absolute amplitude of the EMG signal in each time interval. It provides a measure of total muscle activity.
After extracting the characteristics, a matrix of arrangements was created with the features. This matrix comprised rows corresponding to the 20 tests carried out by eight people and for the different movements (five movements of the right arm). In contrast, the columns corresponded to the 26 predictors multiplied by the four channels.
4.4. Feature Selection
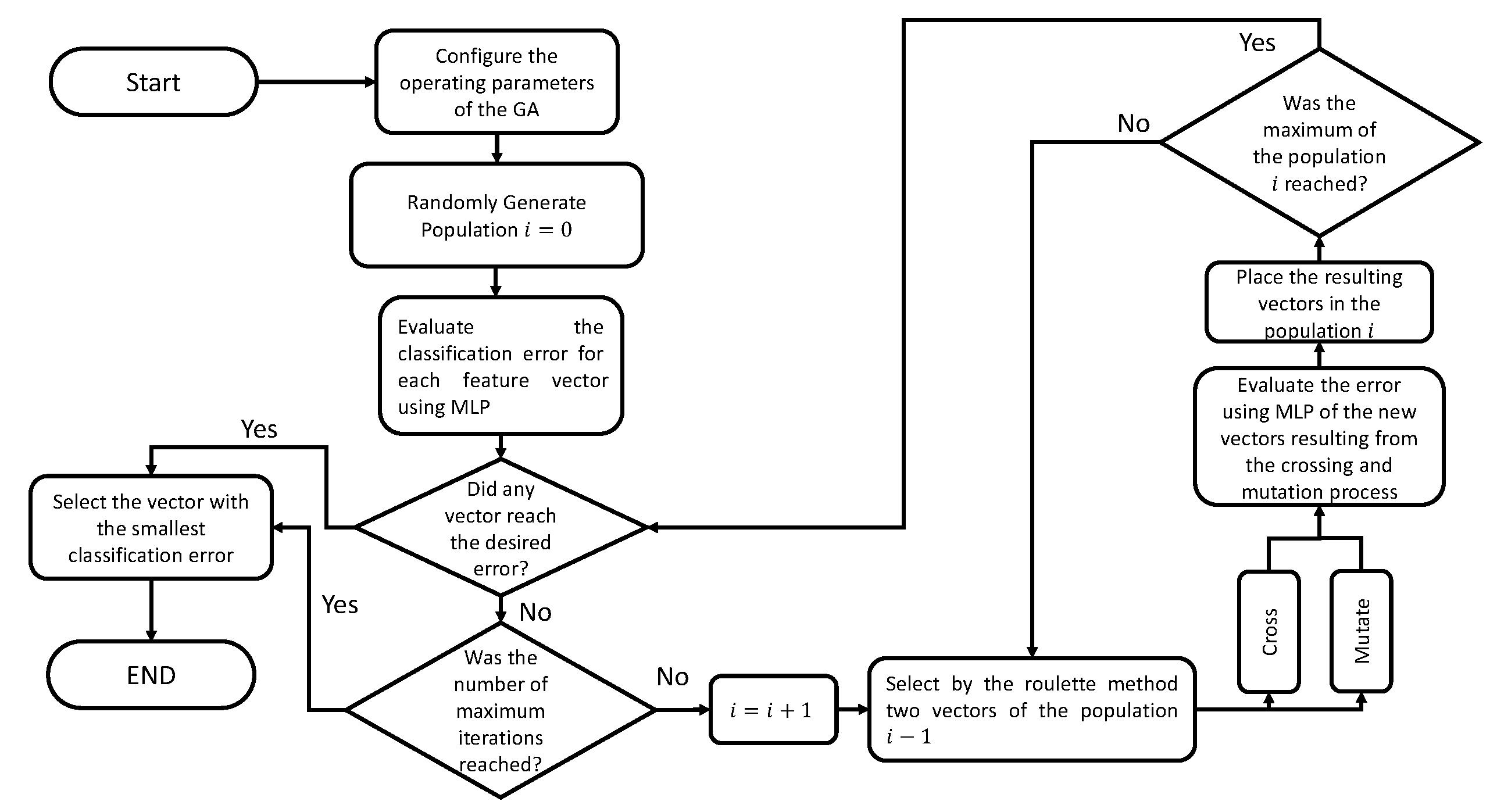
Figure 1 shows the methodology for the selection of characteristics. GA was used to select features to minimize the classification error of the validation data for a specific set of features used as input to a multilayer perceptron. The model hyperparameters were selected manually. The same input data from 9 of the 10 participants that comprised the database were used for the feature and hyperparameter selection.
Table 2 shows the initial parameters used in GA for feature selection. These parameters include the initial population, the mutation rate, and the hyperparameters of the MLP, among others.
4.5. Design and Integration of the Metaheuristic Algorithms and MLP
For the selection of the hyperparameters of the neural network, the PSO and GWO techniques were used. The cost criterion was the error of the validation stage. First, the completed data were divided into training, testing, and validation sets. The training set was used to train the neural network, the test set was used to fit the hyperparameters of the network, and the validation set was used to evaluate the final performance of the model.
Table 3 shows the initial parameters used in the PSO algorithm for the selection of the hyperparameters of the neural network. These parameters include the size of the particle population, the number of iterations, the range of values allowed for each hyperparameter (hidden neurons, epochs, mini-batch size, and learning rate), and the initial values for the coefficients of inertia, personal acceleration, and social acceleration. The Clerc and Kennedy method was used to calculate the coefficients in the PSO algorithm [
27].
On the other hand,
Table 4 shows the initial values for the hyperparameter selection process for GWO. Unlike PSO, only the initial number of individuals and the maximum number of iterations must be selected, in addition to the intervals for the MLP hyperparameters.
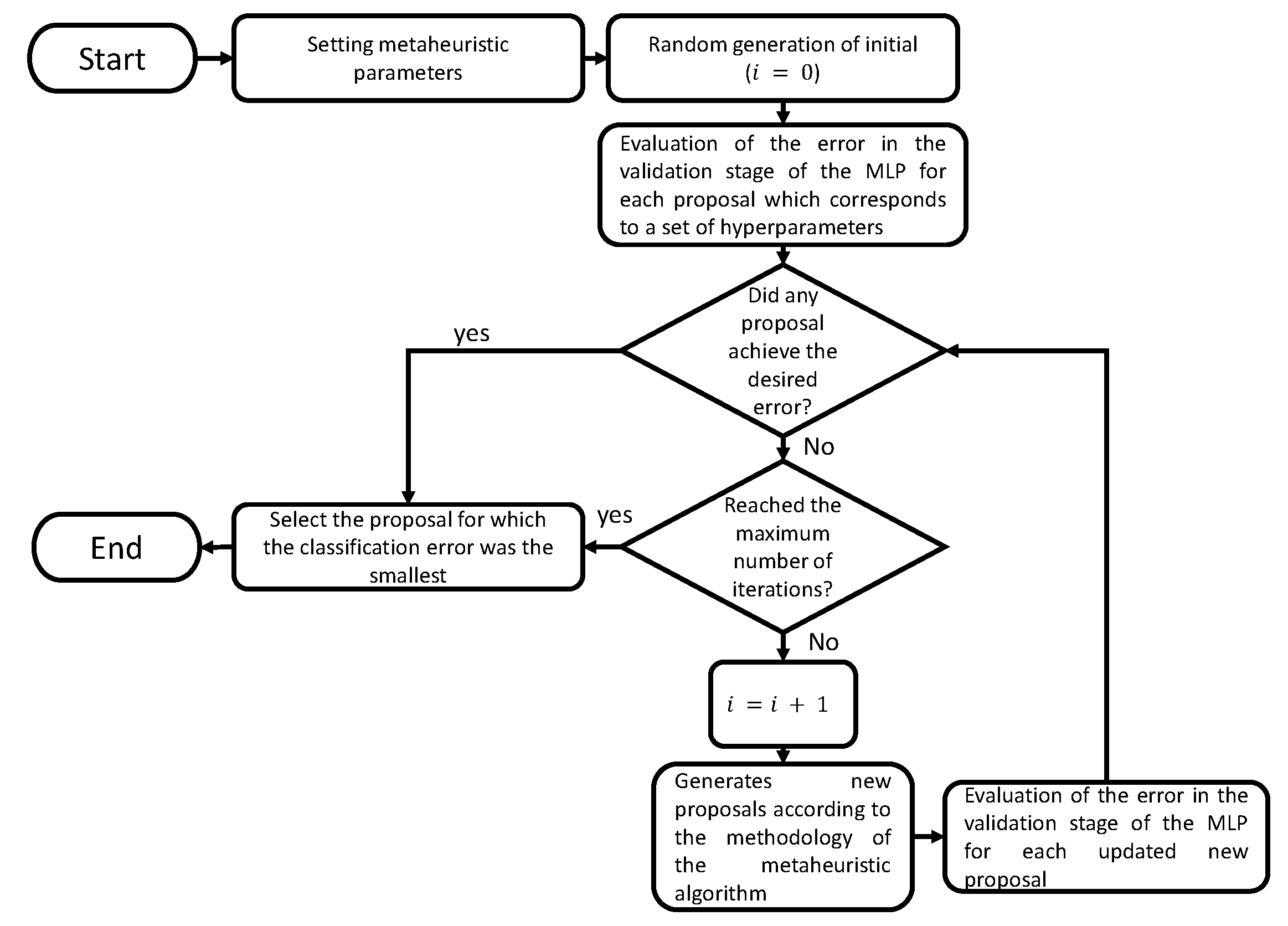
The different stages of the general methodology for the integration of the PSO and GWO algorithms with an MLP neural network for hyperparameter selection are shown in
Figure 2.
5. Results
This section presents and analyzes the results obtained from the multiple stages of the methodology.
5.1. Feature Selection
Table 5 shows the characteristics that GA selected from 104 predictors. In total, 55 features were selected and used as inputs in an MLP to classify the data and select the hyperparameters, representing a 47% reduction in features. A final classification percentage of 93% was achieved.
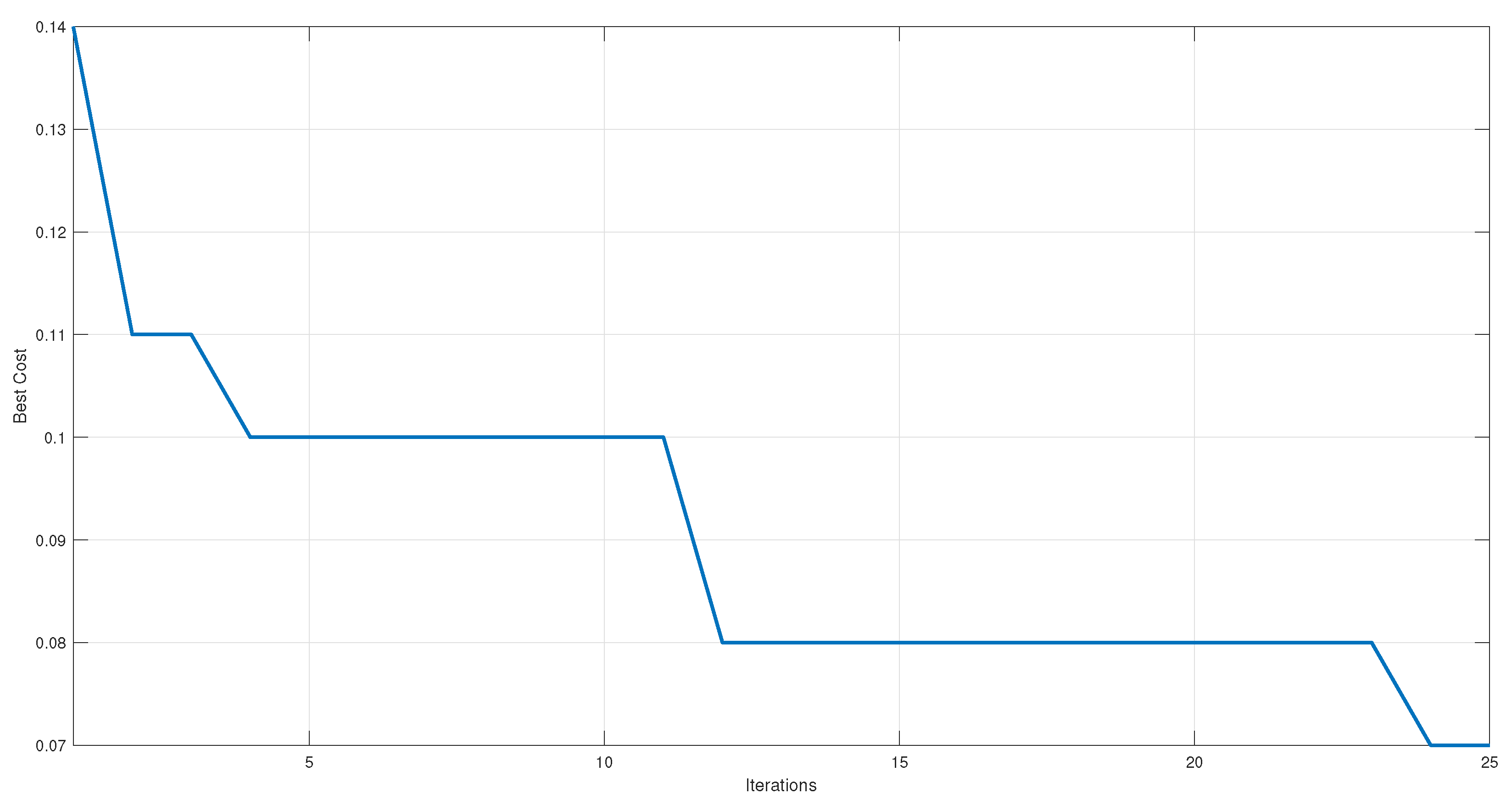
As shown in
Figure 3, initially, the feature selection process had an error rate of 14%. GA improved the performance during the first iterations and reduced the errors to 11%. However, it stalled at a 10% error for eight iterations and an 8% error for 12 iterations. This deadlock occurred when existing candidate solutions had already explored most of the search space and new feature combinations that significantly improved the performance were not found. At this point, GA became stuck in a local minimum. This deadlock was overcome by implementing the mutate operation. In this case, it was possible that, during the 10% error plateau period, some mutation introduced in a later iteration led to the exploration of a new combination of features that improved the performance. This new solution could have been selected and propagated in the following generations, finally allowing it to reach a classification value of 93%.
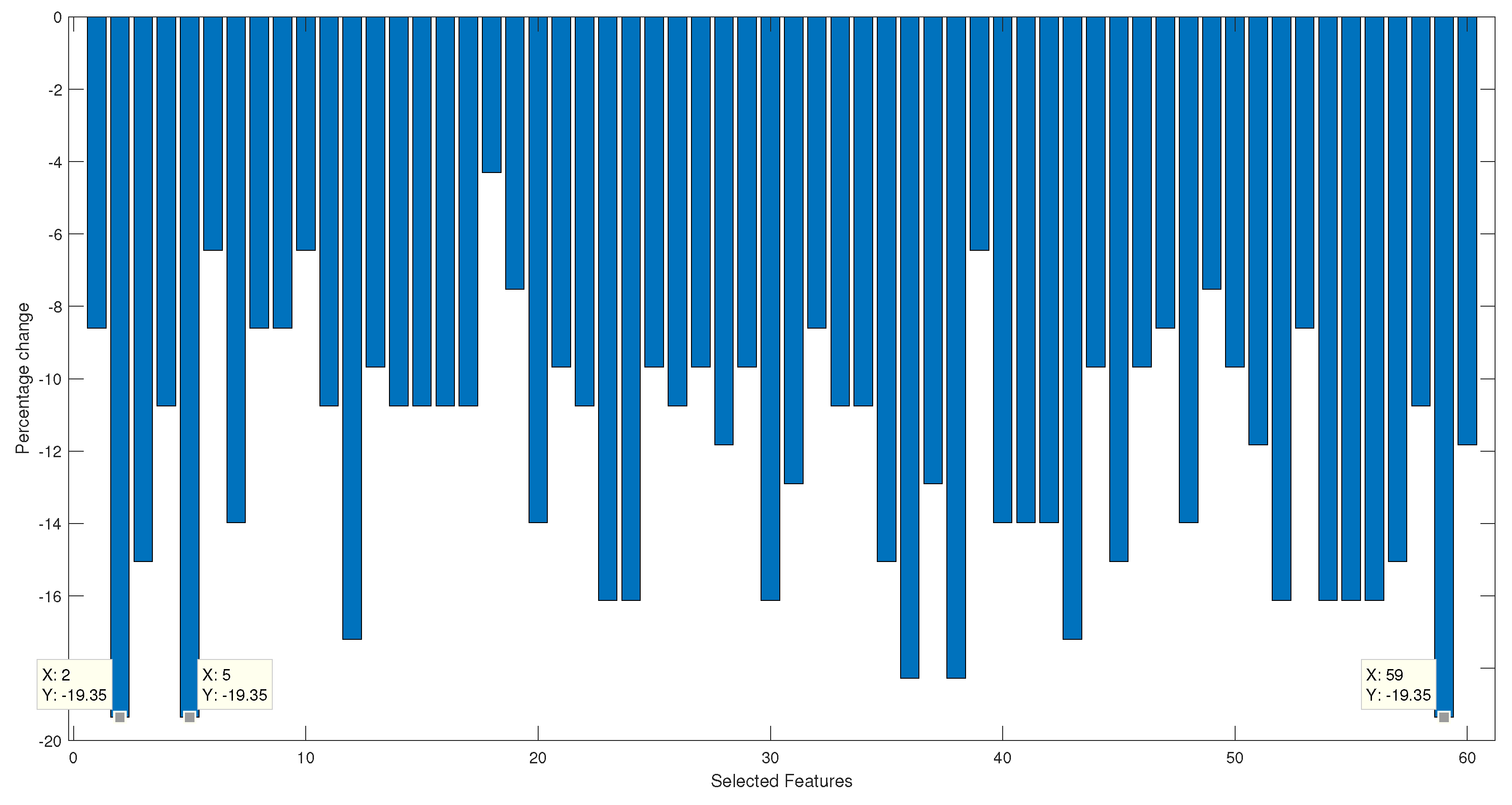
In order to ensure that the feature selection process was carried out correctly and that only predictors that allowed high classification were selected, a sensitivity analysis was carried out. In
Figure 4, the bar graph is shown, where the percentage decrease or increase in precision can be observed concerning the classification obtained at the end of the character selection stage, which was 93%.
It is observed that feature number 18, which corresponds to the mean absolute value type 1 of channel 2, has the lowest percentage decrease in classification when eliminated. On the other hand, the characteristics with the most significant contributions are the absolute value of the fifth moment channel 4, integrated EMG channel 1, and modified mean value type 1 channel 1. When comparing the characteristics that present a more significant contribution against those of lesser contribution, it is seen that the type 1 modified mean value appears in both limits. The difference occurs in the channel from which the characteristic is extracted. Therefore, the exact predictor can have more or less importance in the classification depending on the muscle from which it is extracted.
5.2. Hyperparameter Selection
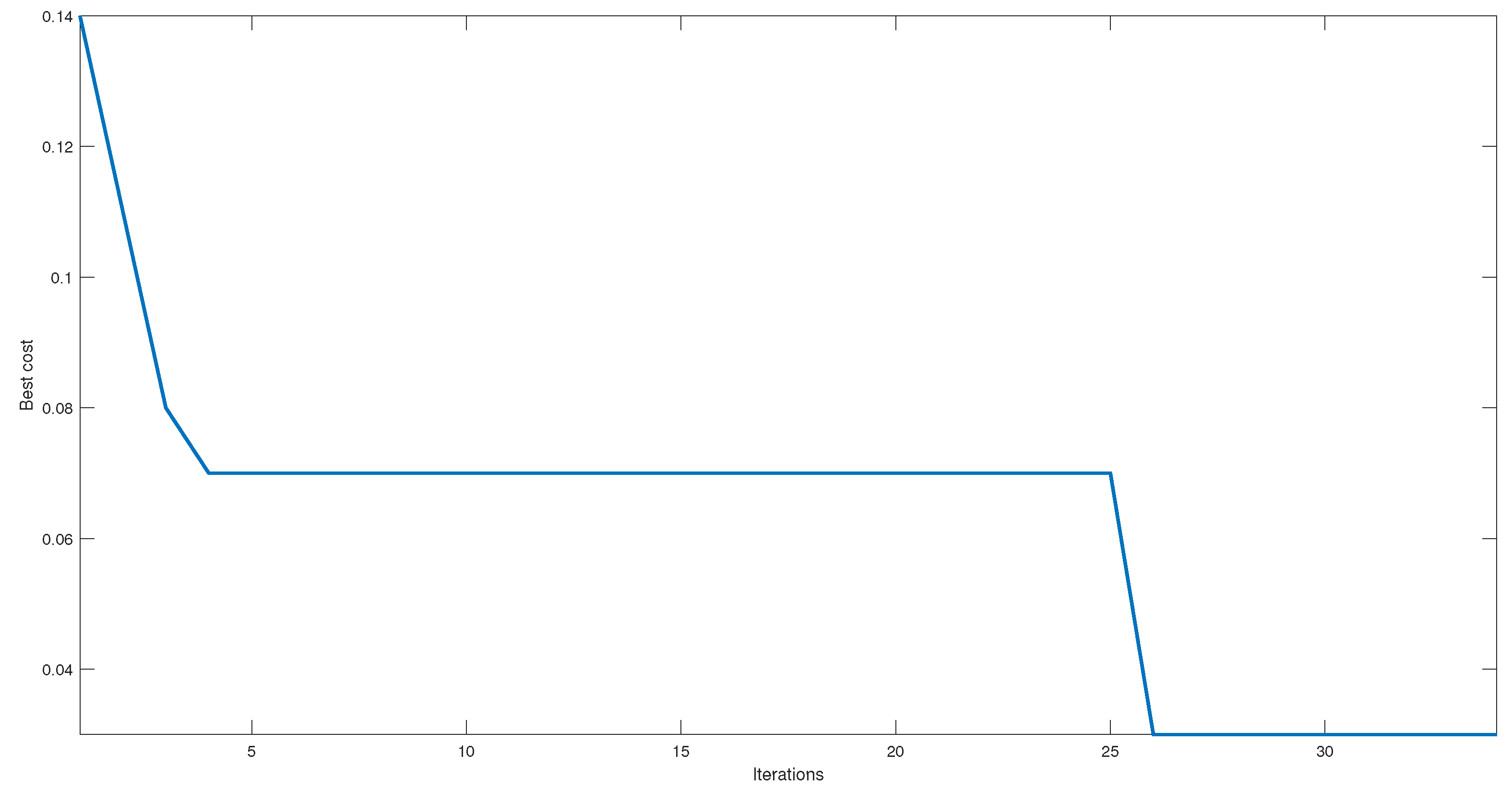
As shown in
Figure 5, in the GWO implementation process, there is an error rate of 14% with the initial values proposed for the hyperparameters. This indicates that the initial solutions have yet to find the best set for the problem since, prior to the selection of the hyperparameters, there is a classification percentage of 93%, and it is found that the efficiency after the hyperparameter adjustment process is more significant than or equal to that of the previous phase.
In iteration 4, a reduction in error to 7% is observed. The proposed solutions have found a hyperparameter configuration that improves the model performance and reduces the error. During subsequent iterations, they continue to adjust their positions and explore the search space for better solutions. As observed during iterations 5 to 20, a deadlock is generated. However, later, it is observed that the error drops to 3%, which indicates that the GWO has managed to overcome this problem and find a solution that considerably improves the classification.
A possible reason that the GWO was able to exit the deadlock and reduce the error may be related to the intensification and diversification of the search. During the first few iterations, the GWO may have been in an intensification phase, focusing on exploiting promising regions of the search space based on the positions of the pack leaders. However, after a while, the GWO may have moved into a diversification phase, where the gray wolves explored new regions of the search space, allowing them to find a better solution and reduce the error to 3%.
Table 6 shows the values obtained for the MLP hyperparameters using GWO, achieving classification in the validation stage of 97%. When comparing the values implemented in the feature layer, it is noteworthy that the number of hidden layers was reduced from 4 to 2. On the other hand, the total number of neurons was reduced from 600 to 409. However, the epochs increased from 10 to 33 after hyperparameter selection. This indicates that the model required more opportunities to adjust the weights and improve its performance on the training dataset. Similarly, the mini-batch size is increased from 20 to 58, indicating that it needs more information during each training stage to adjust the weights.
Finally, the learning rate increased from 0.0001 to 0.002237, which showed that the neural network learned faster during training. The results indicate that the selection of the hyperparameters improved the efficiency of the model by reducing its complexity, without compromising its classification ability.
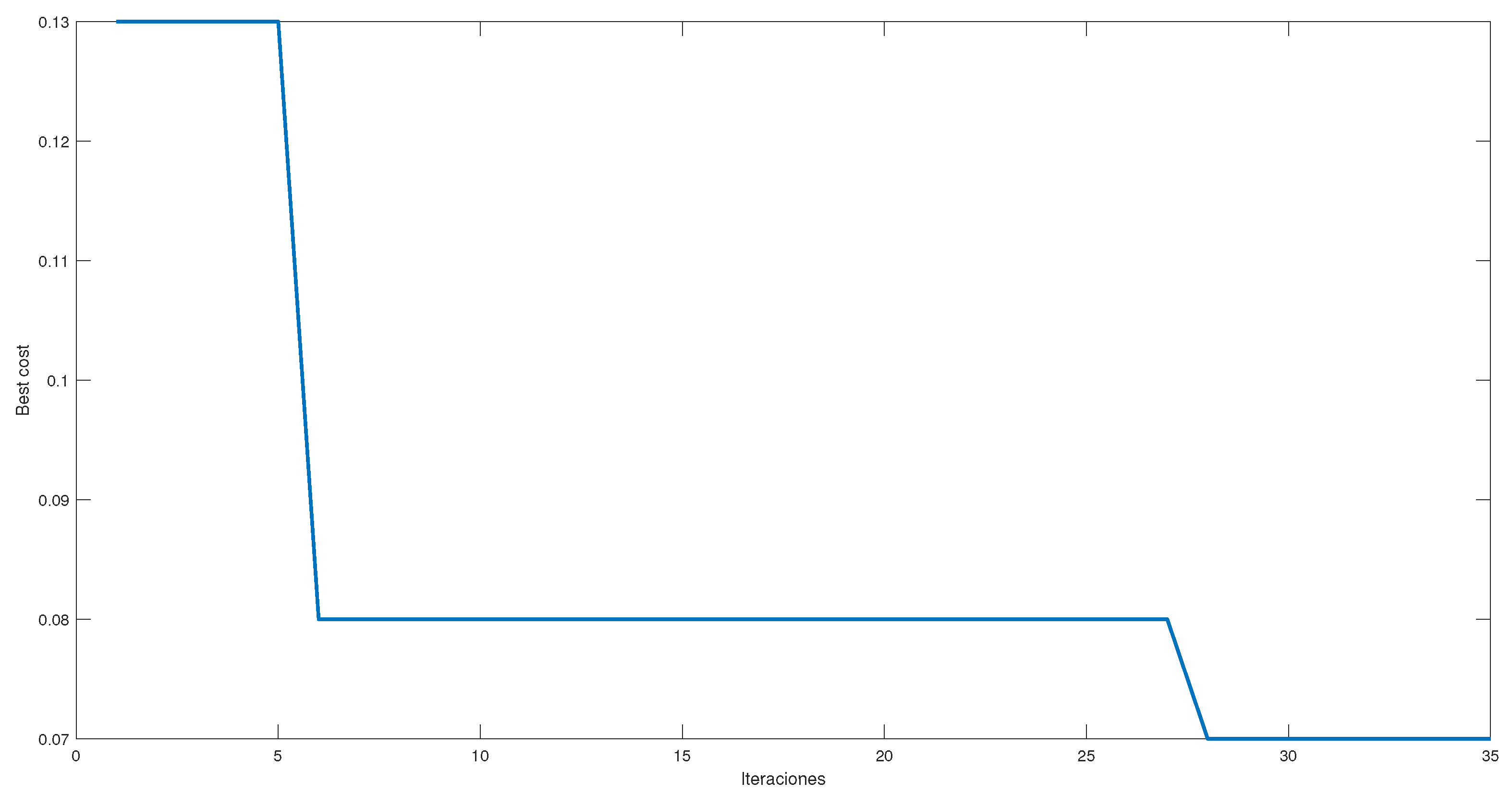
Figure 6 shows the error reduction in selecting hyperparameters by PSO. The best initial proposal achieves a 13% error. After this, there is a stage where the error percentage is kept constant until iteration 6. From there, the error is reduced to 8%. Once this error is reached, it remains constant until iteration 27. Once iteration 28 begins, an error of 7% is achieved, representing only a 1% improvement. This 1% improvement is not a significant increase and could be attributed to slight variations in the MLP training weights.
On the other hand,
Table 7 shows the calculated values of the MLP hyperparameters through PSO; the precision achieved is less than that achieved by GWO, being 93%. Despite this, a 50% reduction in hidden layers is also achieved, and it manages to maintain the precision percentage obtained in the feature selection stage with fewer neurons than achieved by GWO, being 359. However, similarly to the values obtained by GWO, the epochs increase to 38. Moreover, the mini-batch size is increased from 50. Finally, the learning rate increases from 0.0001 to 0.0010184. This smaller amount of information used for training, and the smaller learning steps and smaller number of neurons, justify the 4% decrease in classification.
When comparing
Figure 5 and
Figure 6, it is observed that both start with error values close to 15%, and, after the first few iterations, there is an improvement close to 50%, achieving an error close to 8%. Hence, both algorithms have a period of stagnation, in which GWO is superior as it obtains a second improvement of 50%, achieving errors of 3%. On the other hand, although, visually, PSO managed to overcome the stagnation, it only managed to reduce the error to 1%, which does not represent a significant improvement and can be attributed to variations within the MLP parameters, such as the weights, and not to the selection of the hyperparameters.
5.3. Validation
After selecting the characteristics and hyperparameters, the rest of the signals that comprised the database were used to validate the results obtained, since this information had never been used before.
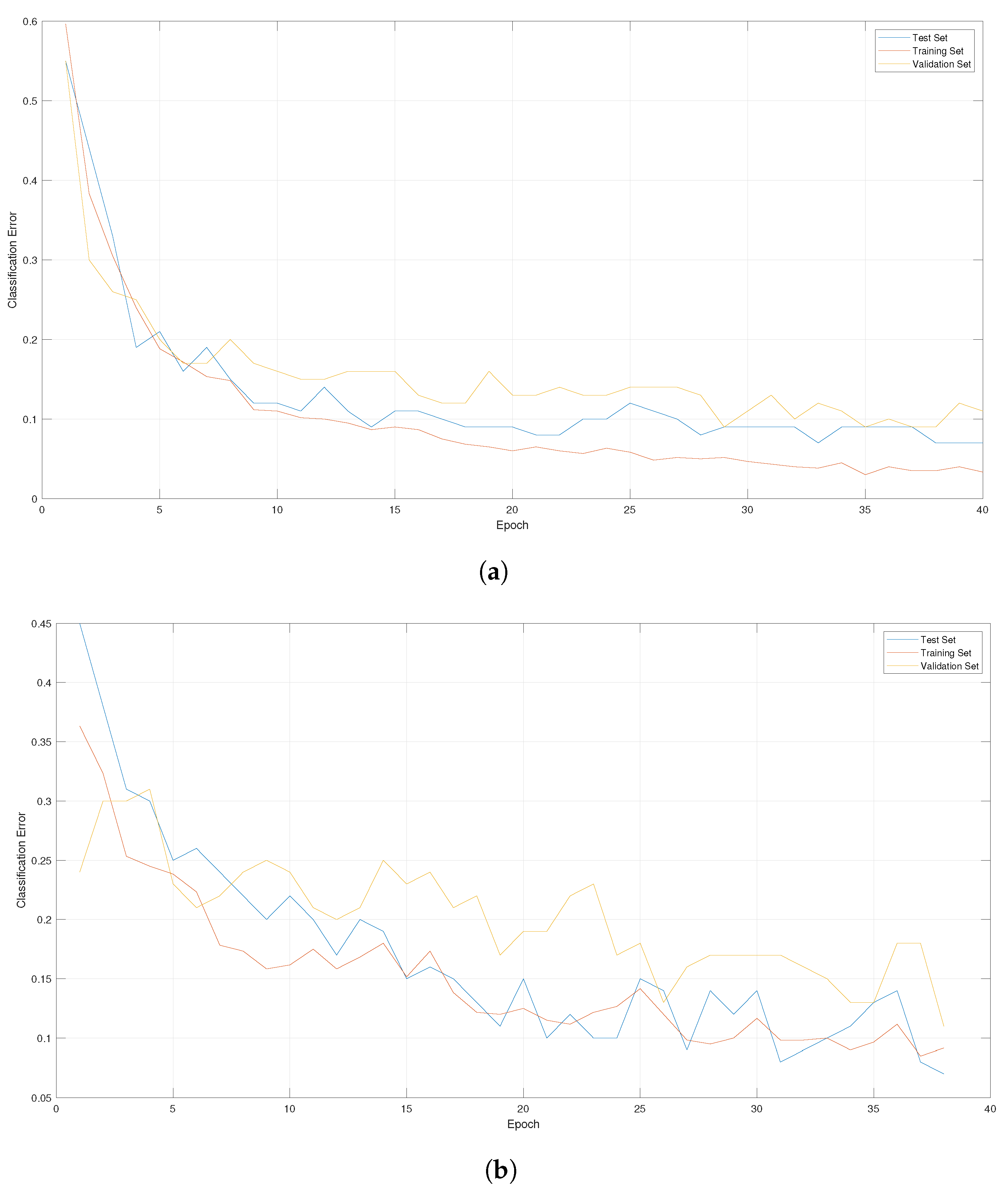
Figure 7 shows the graphs of the error in the training stage (60% of the data corresponding to 9 of 10 people, equivalent to 600 data to be classified), the test stage (40% of the data corresponding to 9 out of 10 people, equivalent to 200 data to classify), and the validation stage, which corresponded to data from the tenth person (equivalent to 100 data). It is noted that the data to be classified are formed from the number of people × the number of movements × the number of repetitions.
Additionally, these graphs allow us to verify the overfitting in the model. The training, test, and validation errors were plotted in each epoch. If the training error decreases while the test and validation errors increase, this suggests the presence of overfitting. However, the results indicated that the errors decreased evenly across the three stages, suggesting that the model can generalize and classify accurately without overfitting. In addition, the percentage for the hyperparameter values given by GWO only decreased by approximately 4% for new input data, reaching 93% accuracy. Meanwhile, for PSO, 3% was lost in the classification, achieving a final average close to 90%.
6. Discussion
The following comparative
Table 8 presents the classification results obtained in previews papers related to the subject of study, compared to the results obtained in this work.
In this work, an approach based on hyperparameter optimization using PSO and GWO was used to improve the performance of a multilayer perceptron in the classification of EMG signals. This approach performed comparably to other previously studied methods.
However, during the experimentation, there were stages of stagnation. Several reasons explain this lack of success. First, the intrinsic limitations of PSO and GWO, such as their susceptibility to stagnation at local optima and their difficulty in exploring complex search spaces, might have made it challenging to obtain the best combination of hyperparameters [
30]. Other factors that might have played a role include the size and quality of the dataset used, since the multilayer perceptron requires a more considerable amount of data to generalize [
31].
Despite these limitations, the proposed approach has several advantages. On the one hand, it allows us to improve the performance of the multilayer perceptron by optimizing the key hyperparameters, which is crucial to obtain a more efficient model. Although the performance is comparable with that of other methods, the metaheuristics-based approach manages to reduce the complexity of the model, indicating its potential as an effective strategy for the classification of EMG signals.
Furthermore, the use of PSO and GWO for hyperparameter optimization offers a systematic and automated methodology, making it easy to apply to different datasets and similar problems. It avoids manually tuning hyperparameters, which is messy and error-prone.
It is important to note that each method has its advantages and limitations, and the appropriate approach may depend on factors such as the size and quality of the dataset, the complexity of the problem, and the available computational resources.
7. Conclusions
The proper selection of hyperparameters in MLPs is crucial to classify EMG signals correctly. Optimizing these hyperparameters is challenging due to the many possible combinations. This work uses the PSO and GWA algorithms to find the best combination of hyperparameters for the neural network. Although 93% accuracy has been achieved in classifying EMG signals, there is still room for improvement. Some possible factors that prevent higher accuracy may be the size of the EMG signal database. One way to overcome these problems is to obtain more extensive and robust databases. It is also possible to use data augmentation techniques to generate more variety in the signals. Another possible solution could be to use more advanced EMG signal preprocessing techniques to reduce noise and interference from unwanted signals. Different neural network architectures and optimization techniques can also be considered to improve the classification accuracy further. It is pointed out that the use of a reduced database in this work was part of an initial and exploratory approach to assessing the feasibility of the methodology. This strategy made it possible to obtain valuable information on the effectiveness of the approach before applying it to more extensive databases.
In addition, it is essential to point out that, in this work, no normalization of the data was performed, which might have further improved the performance of the MLP model. Therefore, it is recommended to consider this step in future work to achieve better performance in classifying EMG signals. It is essential to highlight that the cost function used in metaheuristics algorithms is crucial for its success. In this work, the error in the validation stage of the neural network was used as the cost function to be minimized. However, alternatives include sensitivity, efficiency, specificity, ROC, and AUC. A cost function that works well in one issue may not work well in another. Therefore, exploring different cost functions and evaluating their performance is advisable before making a final decision. Another factor that should be considered in this work is the initialization methodology of the network weights. Such considerations and initialization alternatives are subjects for future work that must be analyzed. In general, the selection of hyperparameters is a fundamental step in the construction and training of neural networks for the classification of EMG signals. With the proper optimization of these hyperparameters and the continuous exploration of new techniques and methods, significant advances can be made in this area of research.
Finally, although other algorithms are recognized for their robustness and ability to handle complex data, the MLP proved a suitable option due to the nature of EMG signals. The flexibility of the MLP to model nonlinear relationships was crucial since the interactions between the components were highly nonlinear and time-varying. Furthermore, the MLP has shown good performance even with small datasets, which was necessary considering the limited data availability.
Author Contributions
Conceptualization, M.A.; methodology, M.A.; software, M.A.; validation, M.A.; formal analysis, M.A. and D.I.; investigation, M.A.; resources, J.R.-R.; writing—original draft preparation, M.A., J.R.-R. and D.I.; writing—review and editing, M.A., J.R.-R. and D.I.; visualization, M.A.; supervision, J.R.-R. and D.I. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Access to the database used in this article can be obtained by emailing any of the authors. Please note that the authors reserve the right to decide whether to share the database and may have specific requirements or restrictions regarding its distribution.
Acknowledgments
We thank Consejo Nacional de Humanidades, Ciencia y Tecnología (CONAHCYT) for the national scholarship for doctoral students, which allowed us to carry out this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Jia, G.; Lam, H.K.; Ma, S.; Yang, Z.; Xu, Y.; Xiao, B. Classification of electromyographic hand gesture signals using modified fuzzy C-means clustering and two-step machine learning approach. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1428–1435. [Google Scholar] [CrossRef]
- Albahli, S.; Alhassan, F.; Albattah, W.; Khan, R.U. Handwritten digit recognition: Hyperparameters-based analysis. Appl. Sci. 2020, 10, 5988. [Google Scholar] [CrossRef]
- Yang, L.; Shami, A. On hyperparameter optimization of machine learning algorithms: Theory and practice. Neurocomputing 2020, 415, 295–316. [Google Scholar] [CrossRef]
- Du, K.L.; Leung, C.S.; Mow, W.H.; Swamy, M.N.S. Perceptron: Learning, generalization, model selection, fault tolerance, and role in the deep learning era. Mathematics 2022, 10, 4730. [Google Scholar] [CrossRef]
- Vincent, A.M.; Jidesh, P. An improved hyperparameter optimization framework for AutoML systems using evolutionary algorithms. Sci. Rep. 2023, 13, 4737. [Google Scholar] [CrossRef] [PubMed]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Purushothaman, G.; Vikas, R. Identification of a feature selection based pattern recognition scheme for finger movement recognition from multichannel EMG signals. Australas. Phys. Eng. Sci. Med. 2018, 41, 549–559. [Google Scholar] [CrossRef]
- Too, J.; Abdullah, A.; Mohd Saad, N.; Tee, W. EMG feature selection and classification using a pbest-guide binary particle swarm optimization. Computation 2019, 7, 12. [Google Scholar] [CrossRef]
- Sui, X.; Wan, K.; Zhang, Y. Pattern recognition of SEMG based on wavelet packet transform and improved SVM. Optik 2019, 176, 228–235. [Google Scholar] [CrossRef]
- Xiu, K.; Xiafeng, Z.; Le, C.; Dan, Y.; Yixuan, F. EMG pattern recognition based on particle swarm optimization and recurrent neural network. Int. J. Perform. Eng. 2020, 16, 1404. [Google Scholar] [CrossRef]
- Bittibssi, T.M.; Zekry, A.H.; Genedy, M.A.; Maged, S.A. sEMG pattern recognition based on recurrent neural network. Biomed. Signal Process. Control 2021, 70, 103048. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, A.; Li, Z.; Wu, Y. Improvement of EMG pattern recognition model performance in repeated uses by combining feature selection and incremental transfer learning. Front. Neurorobot. 2021, 15, 699174. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, W.; Kan, X.; Yao, W. A novel adaptive mutation PSO optimized SVM algorithm for sEMG-based gesture recognition. Sci. Program. 2021, 2021, 9988823. [Google Scholar] [CrossRef]
- Aviles, M.; Sánchez-Reyes, L.M.; Fuentes-Aguilar, R.Q.; Toledo-Pérez, D.C.; Rodríguez-Reséndiz, J. A novel methodology for classifying EMG movements based on SVM and genetic algorithms. Micromachines 2022, 13, 2108. [Google Scholar] [CrossRef]
- Dhindsa, I.S.; Gupta, R.; Agarwal, R. Binary particle swarm optimization-based feature selection for predicting the class of the knee angle from EMG signals in lower limb movements. Neurophysiology 2022, 53, 109–119. [Google Scholar] [CrossRef]
- Li, X.; Yang, Y.; Chen, H.; Yao, Y. Lower limb motion pattern recognition based on IWOA-SVM. In Proceedings of the Third International Conference on Computer Science and Communication Technology (ICCSCT 2022), Beijing, China, 30–31 July 2022; Lu, Y., Cheng, C., Eds.; SPIE: Bellingham, WA, USA, 2022. [Google Scholar]
- Toledo-Pérez, D.C.; Rodríguez-Reséndiz, J.; Gómez-Loenzo, R.A.; Jauregui-Correa, J.C. Support vector machine-based EMG signal classification techniques: A review. Appl. Sci. 2019, 9, 4402. [Google Scholar] [CrossRef]
- Raez, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG signal analysis: Detection, processing, classification and applications. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar] [CrossRef]
- Bi, L.; Feleke, A.g.; Guan, C. A review on EMG-based motor intention prediction of continuous human upper limb motion for human-robot collaboration. Biomed. Signal Process. Control 2019, 51, 113–127. [Google Scholar] [CrossRef]
- Argatov, I. Artificial neural networks (ANNs) as a novel modeling technique in tribology. Front. Mech. Eng. 2019, 5, 30. [Google Scholar] [CrossRef]
- Zemzami, M.; El Hami, N.; Itmi, M.; Hmina, N. A comparative study of three new parallel models based on the PSO algorithm. Int. J. Simul. Multidiscip. Des. Optim. 2020, 11, 5. [Google Scholar] [CrossRef]
- Jain, M.; Saihjpal, V.; Singh, N.; Singh, S.B. An overview of variants and advancements of PSO algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]
- Nematzadeh, S.; Kiani, F.; Torkamanian-Afshar, M.; Aydin, N. Tuning hyperparameters of machine learning algorithms and deep neural networks using metaheuristics: A bioinformatics study on biomedical and biological cases. Comput. Biol. Chem. 2022, 97, 107619. [Google Scholar] [CrossRef] [PubMed]
- Nanda, S.J.; Panda, G. A survey on nature inspired metaheuristic algorithms for partitional clustering. Swarm Evol. Comput. 2014, 16, 1–18. [Google Scholar] [CrossRef]
- Andonie, R. Hyperparameter optimization in learning systems. J. Membr. Comput. 2019, 1, 279–291. [Google Scholar] [CrossRef]
- Asghari Oskoei, M.; Hu, H. Myoelectric control systems—A survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Fajardo, J.M.; Gomez, O.; Prieto, F. EMG hand gesture classification using handcrafted and deep features. Biomed. Signal Process. Control 2021, 63, 102210. [Google Scholar] [CrossRef]
- Luo, R.; Sun, S.; Zhang, X.; Tang, Z.; Wang, W. A low-cost end-to-end sEMG-based gait sub-phase recognition system. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 267–276. [Google Scholar] [CrossRef]
- Tran, B.; Xue, B.; Zhang, M. Overview of particle swarm optimisation for feature selection in classification. In Lecture Notes in Computer Science; Lecture notes in computer science; Springer International Publishing: Cham, Switzerland, 2014; pp. 605–617. [Google Scholar]
- Dargan, S.; Kumar, M.; Ayyagari, M.R.; Kumar, G. A survey of deep learning and its applications: A new paradigm to machine learning. Arch. Comput. Methods Eng. 2020, 27, 1071–1092. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}