
Experimental Study into Optimal Configuration and Operation of Two-Four Rotor Coaxial Systems for eVTOL Vehicles


Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
2. Materials and Methods
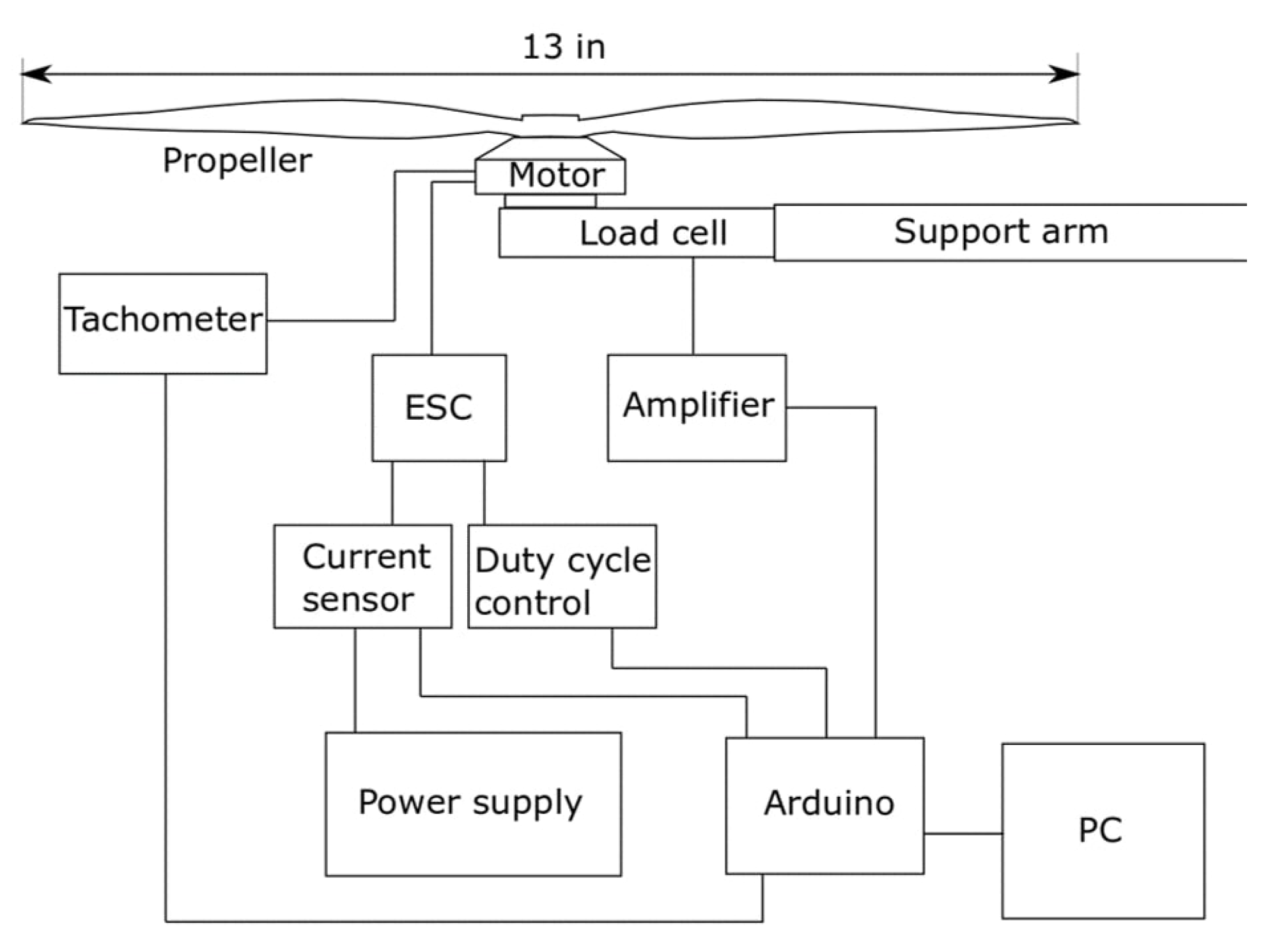
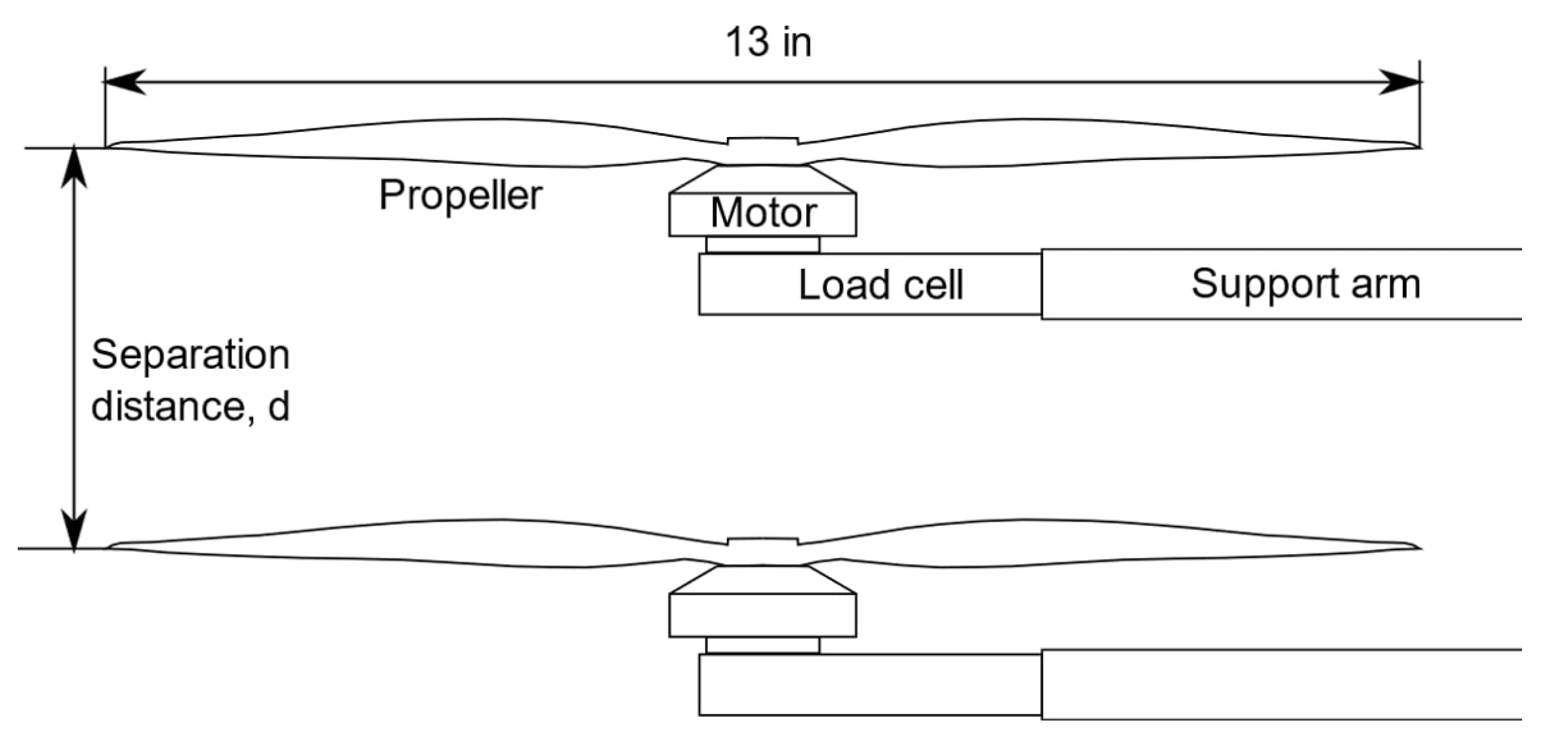
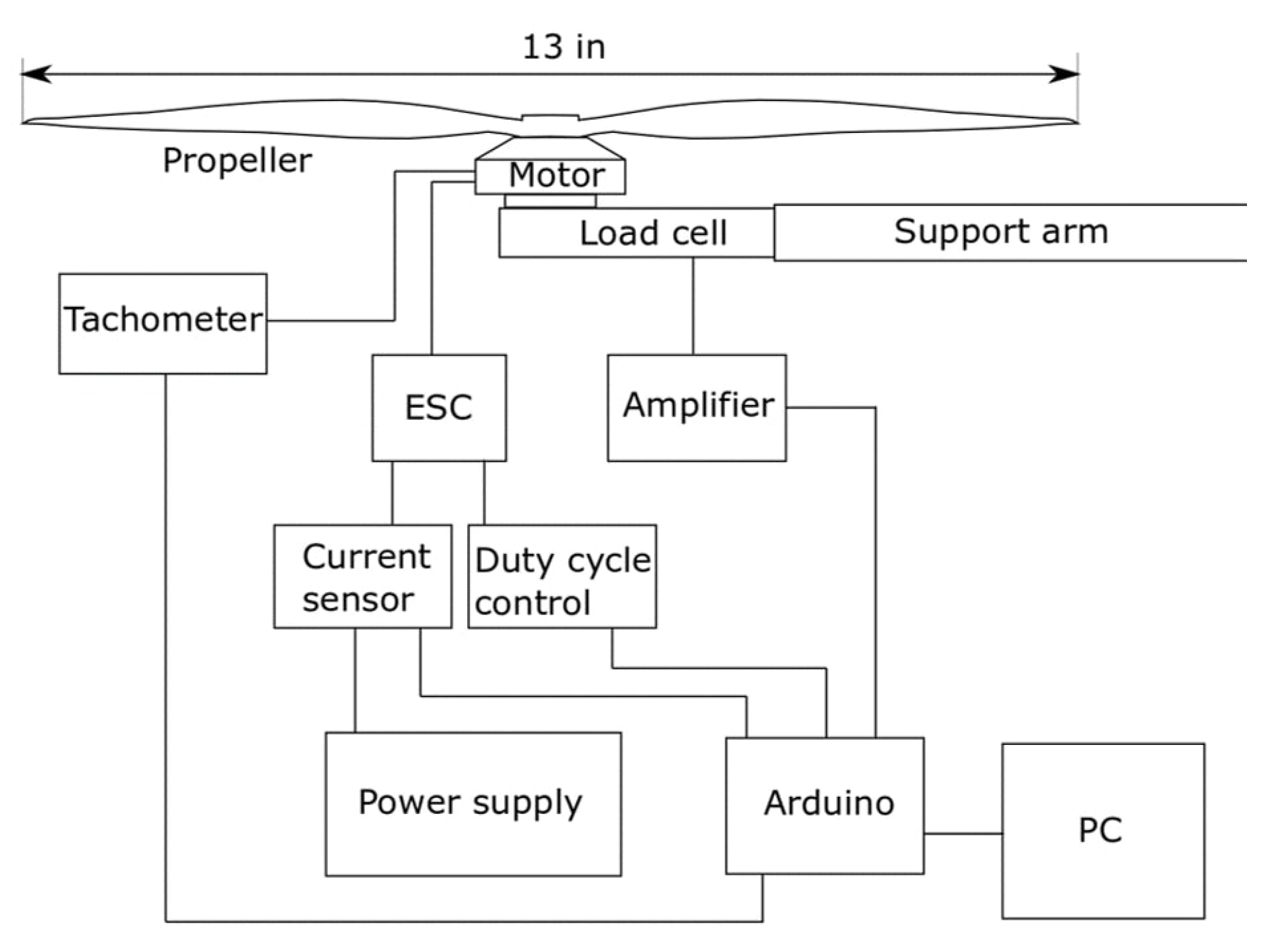
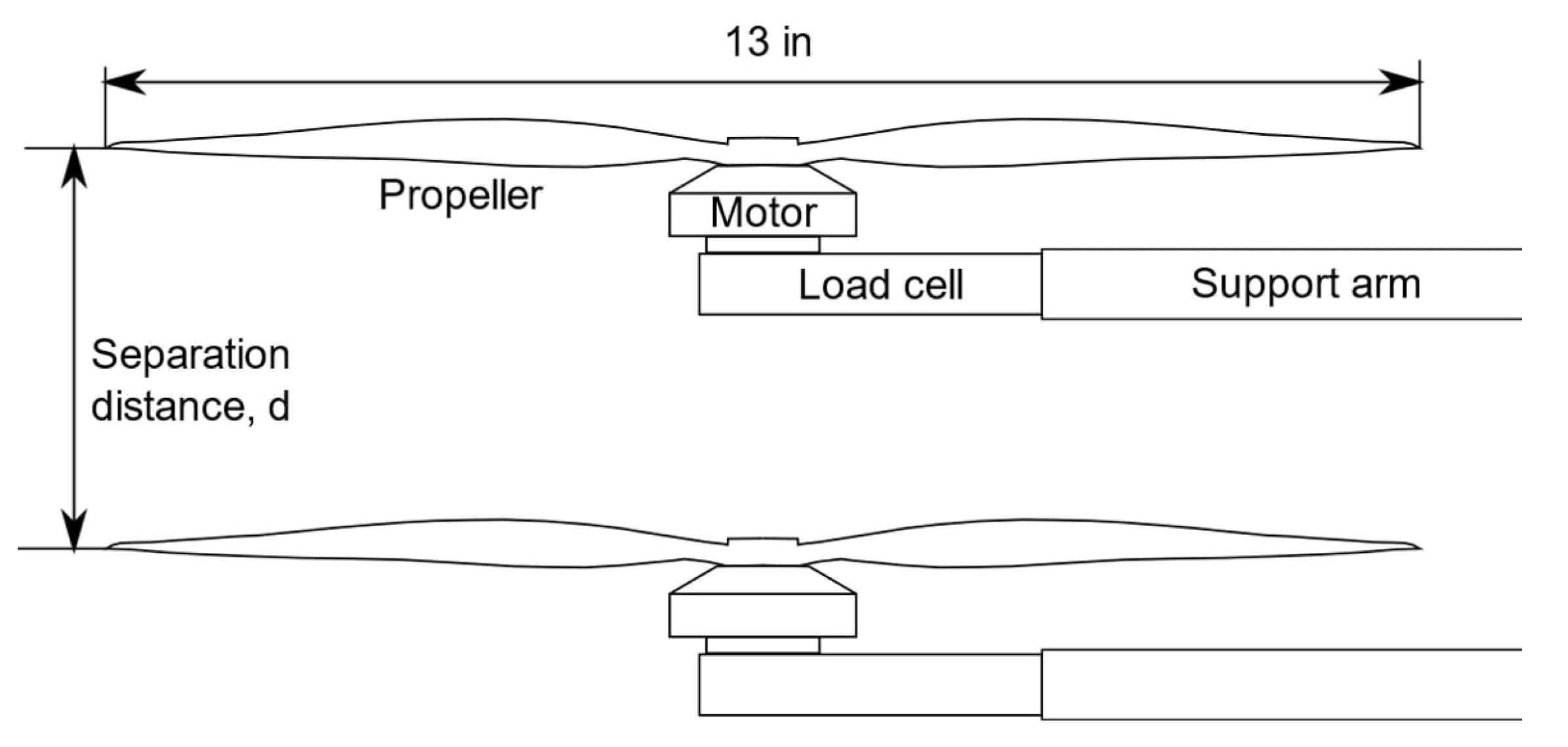
2.1. Experimental Test-Bed
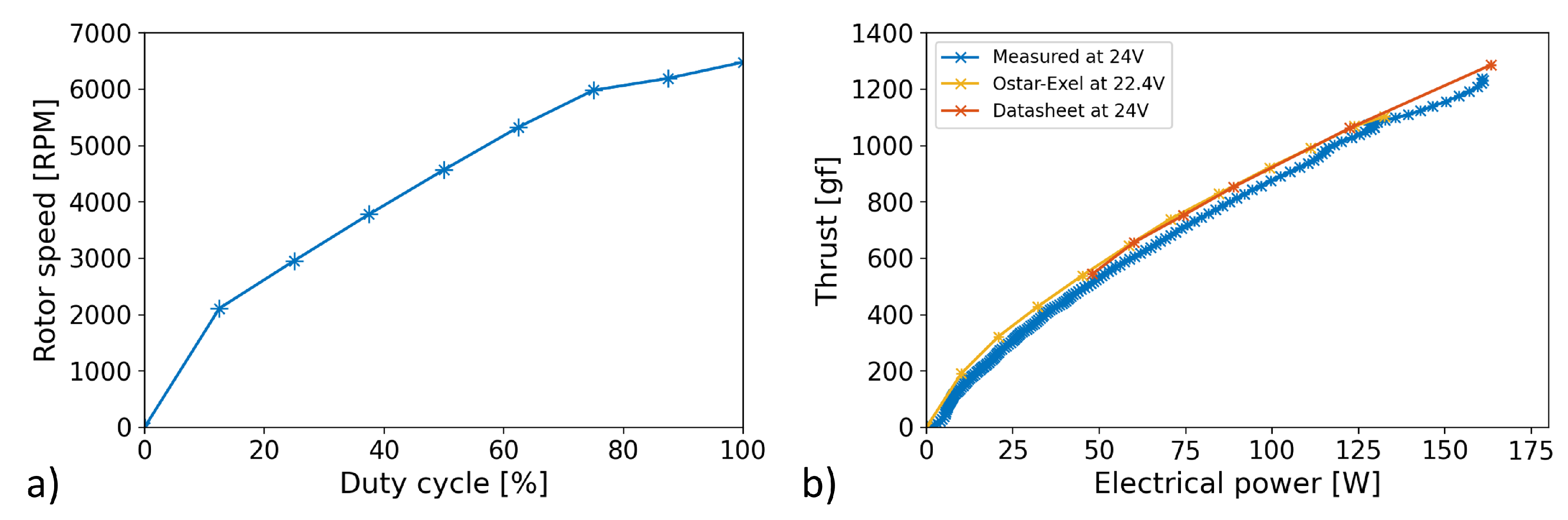
2.2. Accuracy of Measurements
3. Results and Discussion
3.1. Two-Rotor Coaxial System
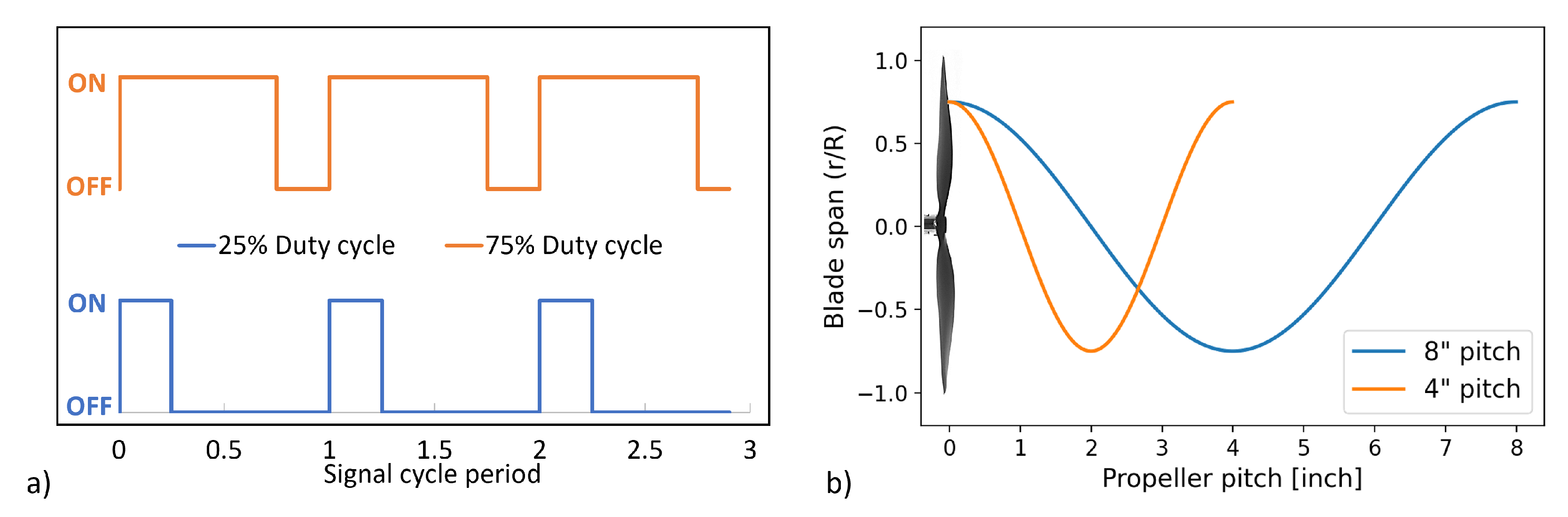
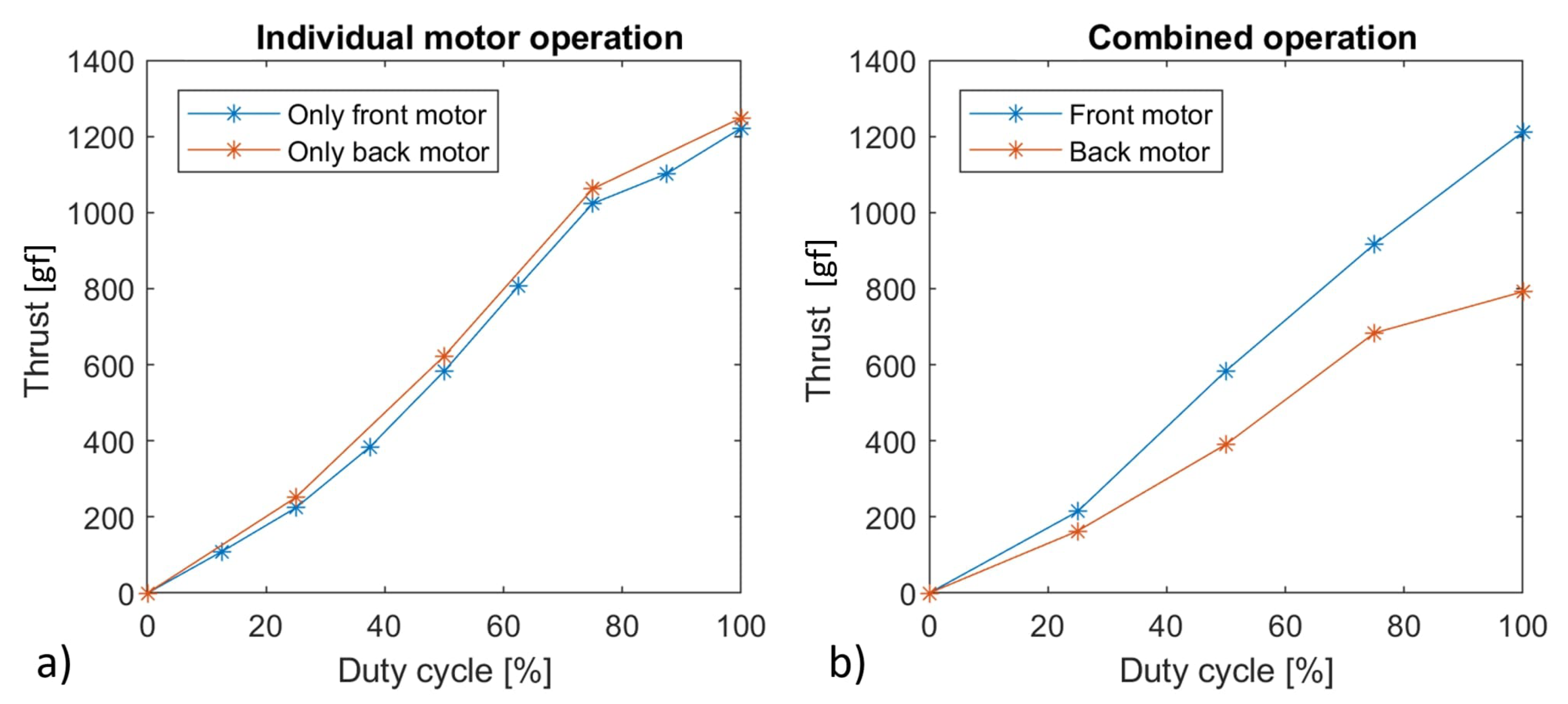
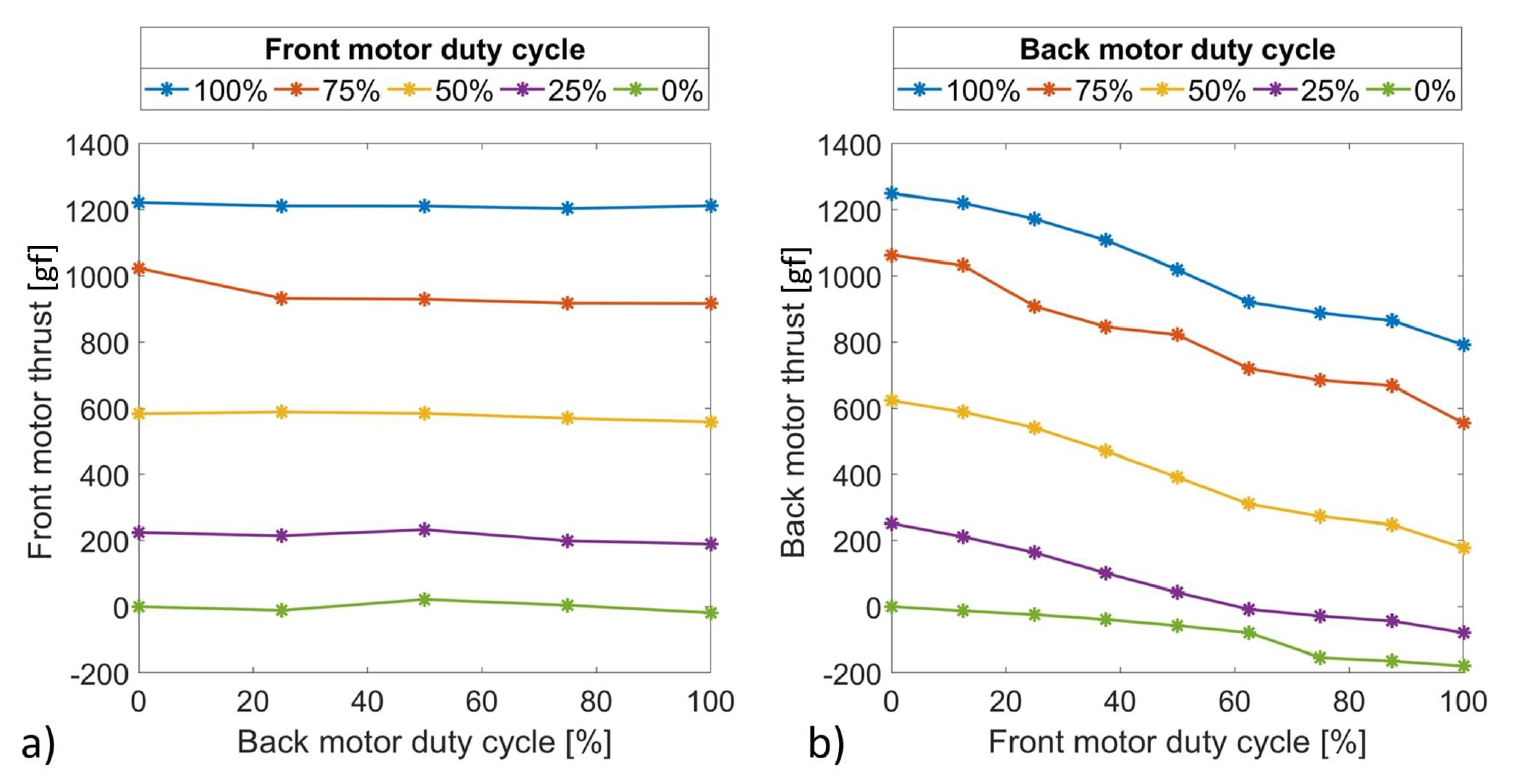
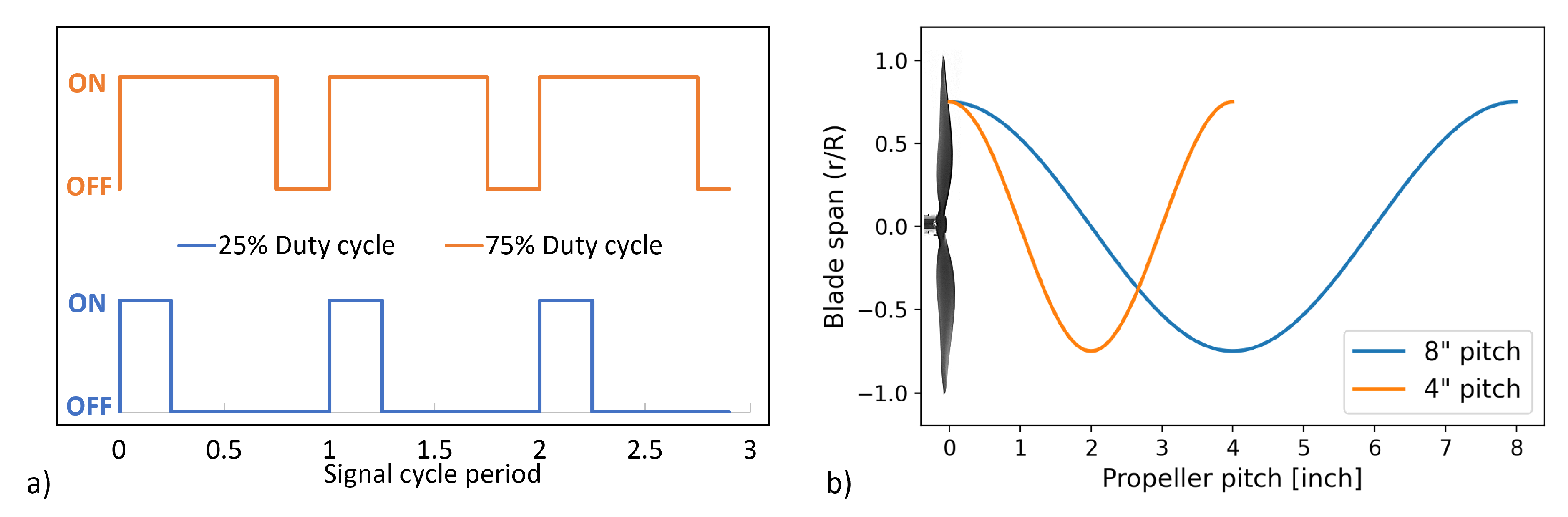
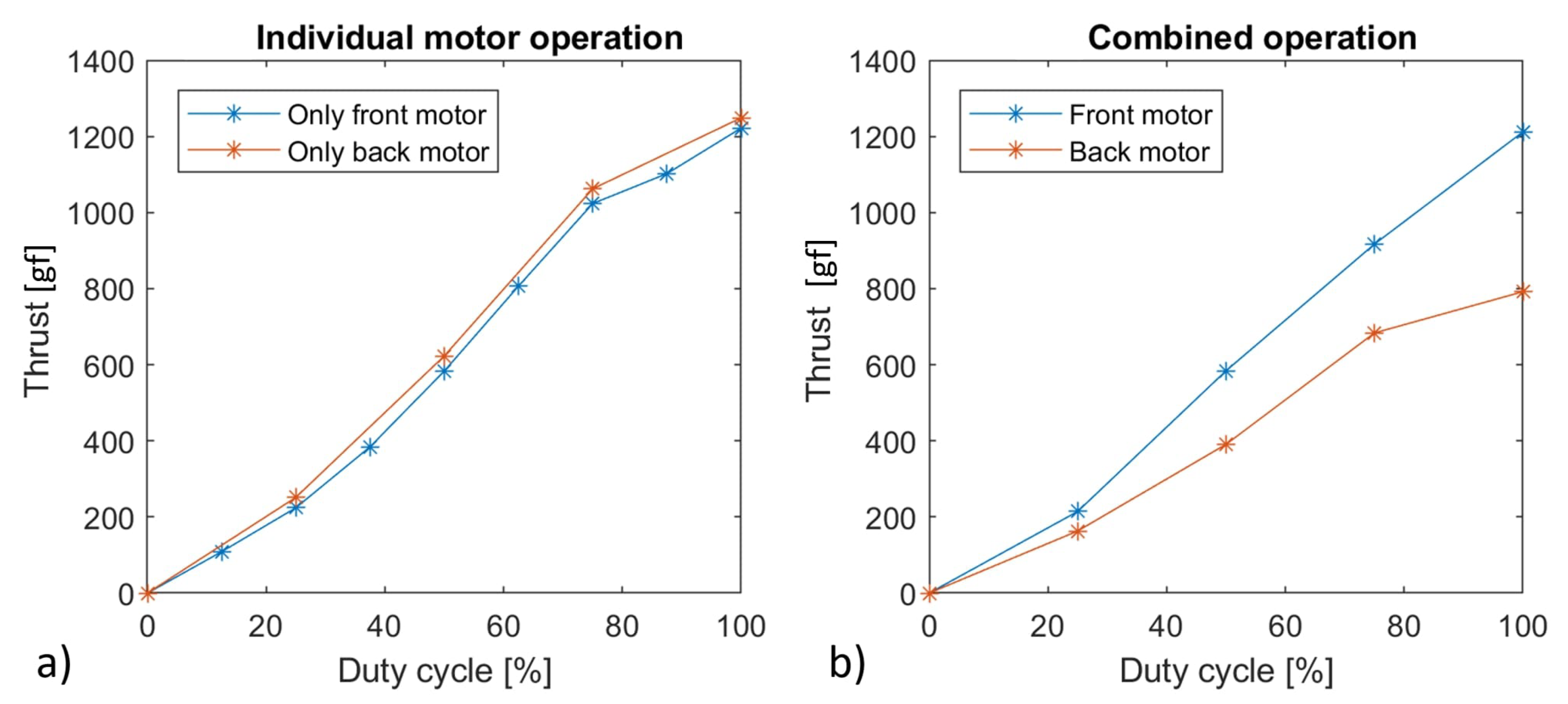
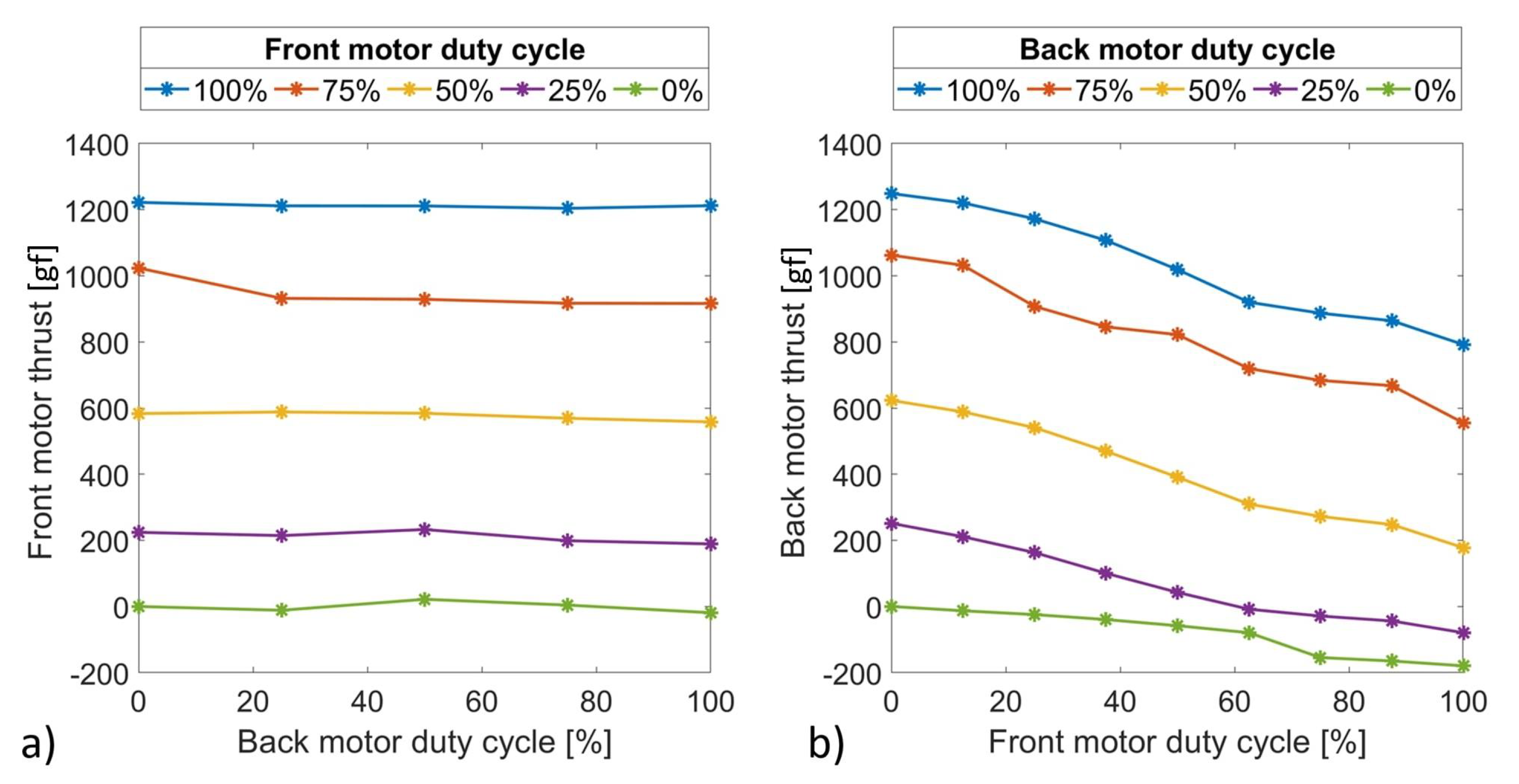
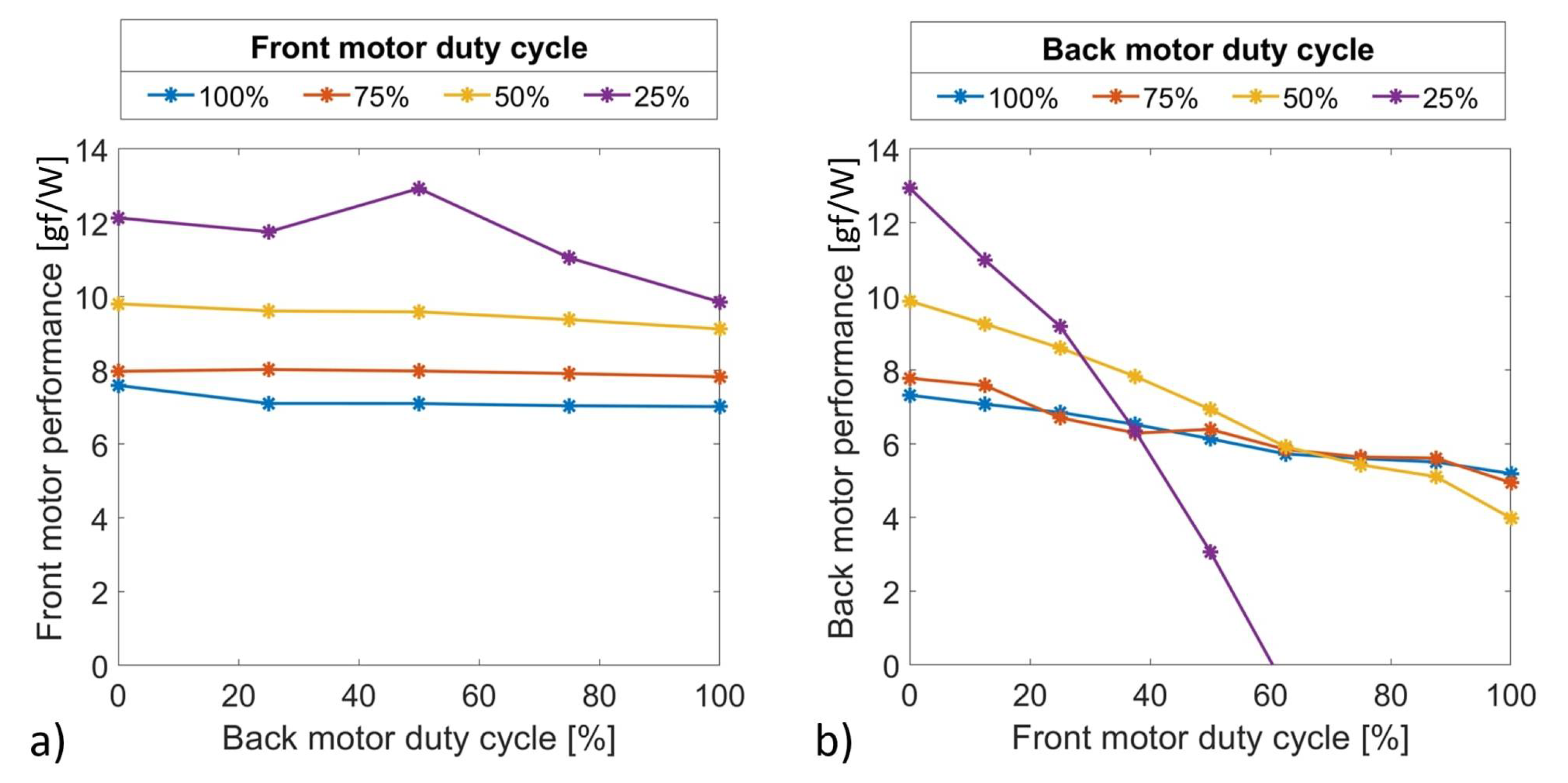
3.1.1. Duty Cycle Effects on the Individual Rotors in a Two-Rotor Coaxial Setup
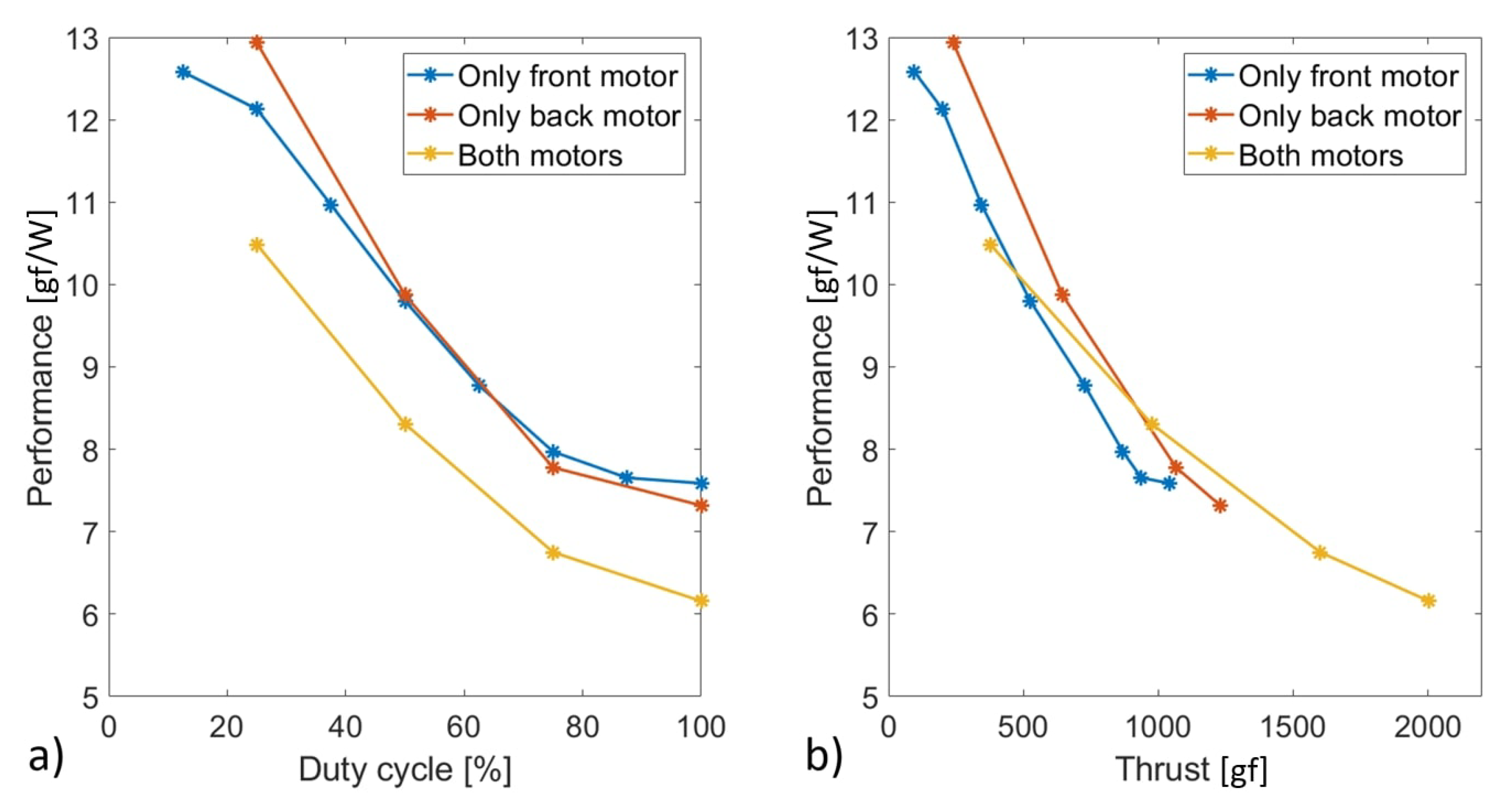
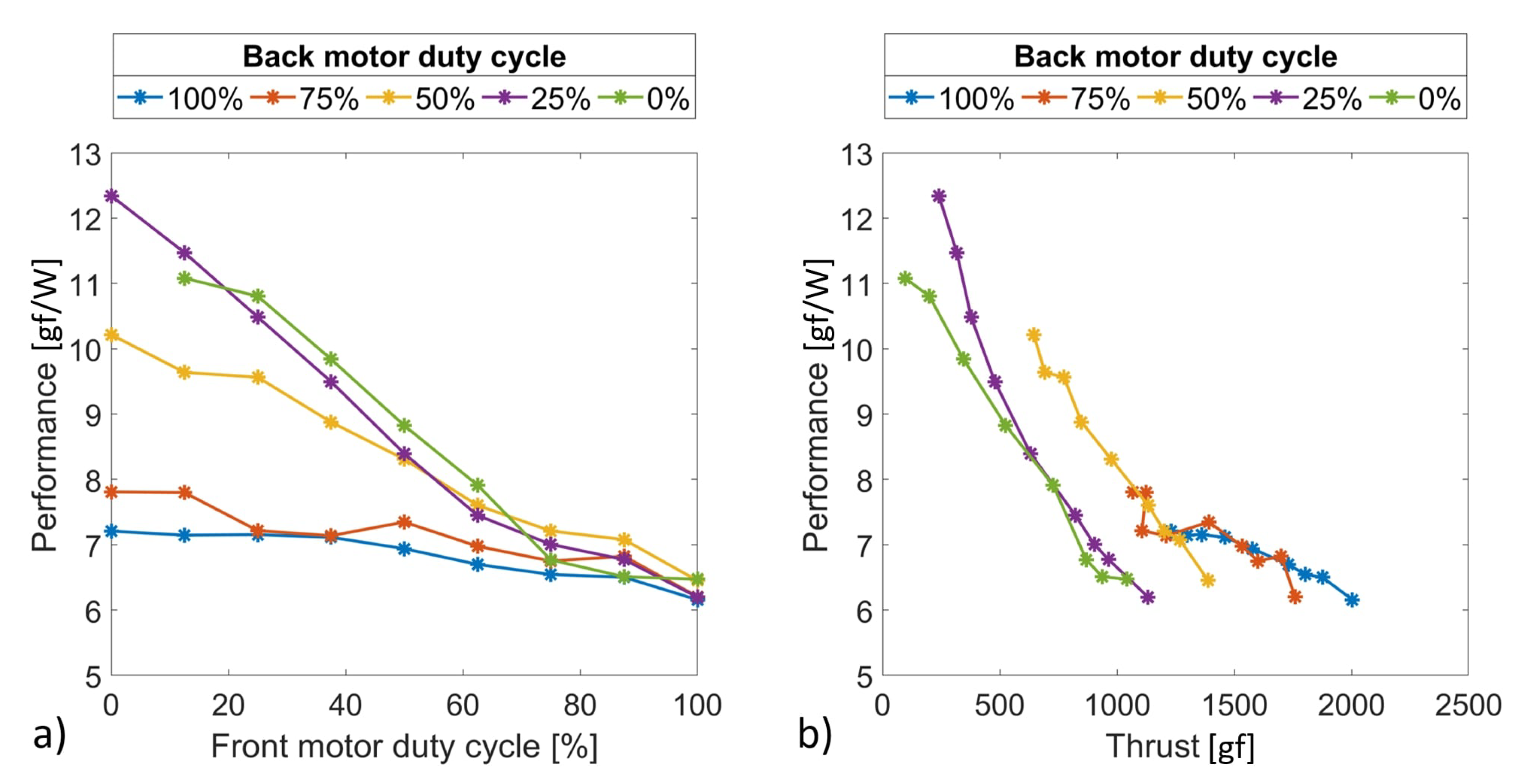
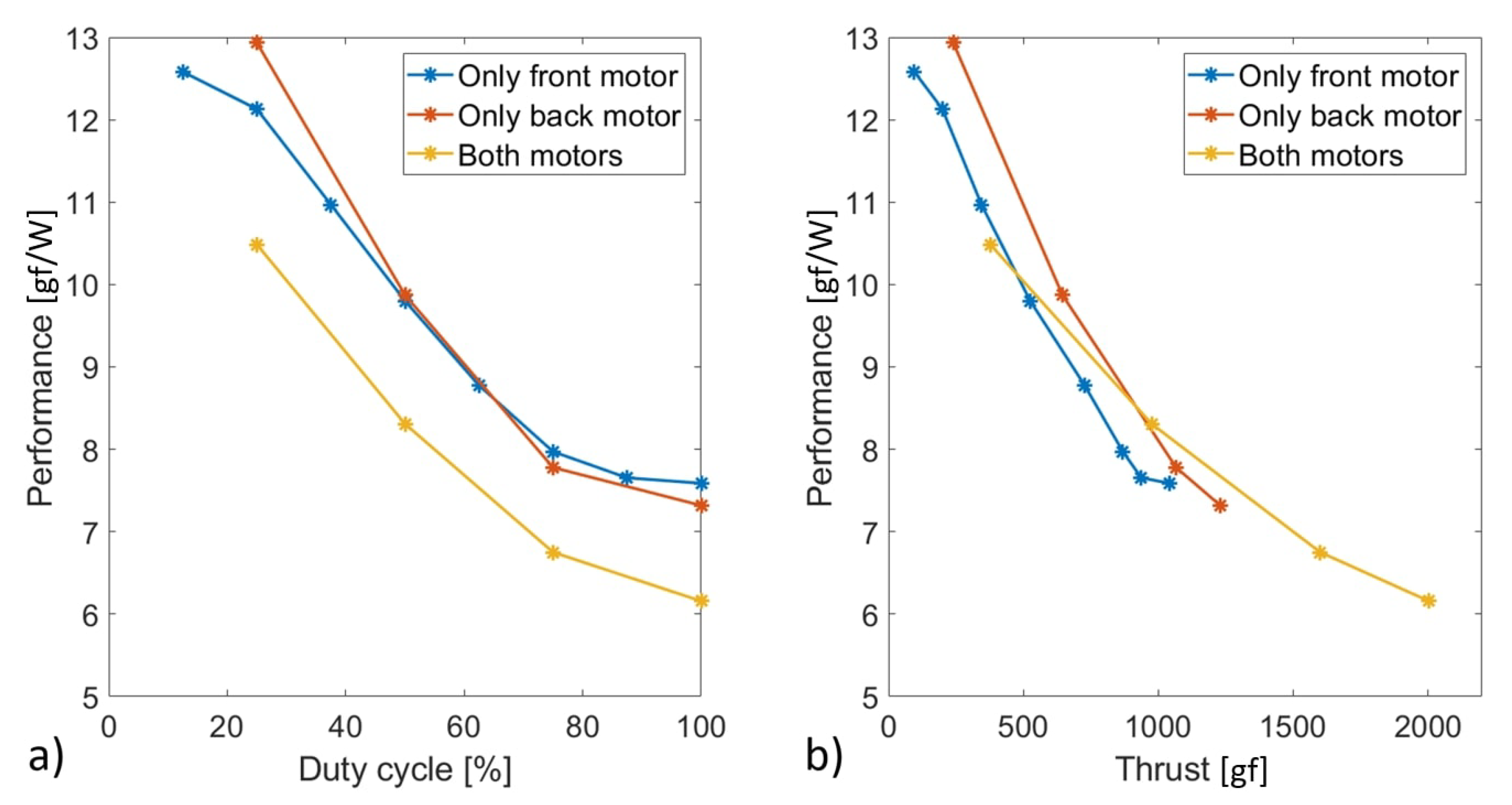
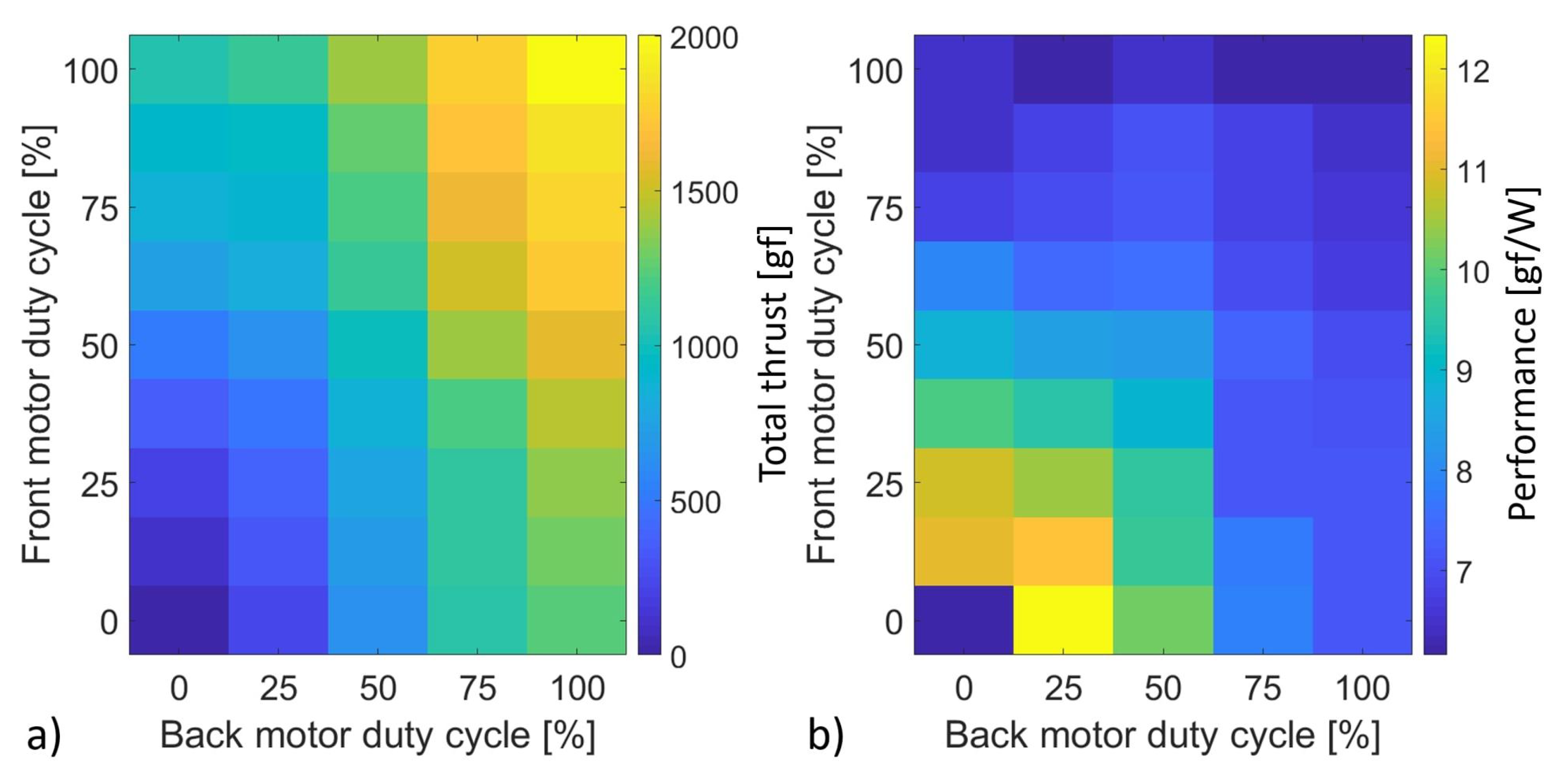
3.1.2. Duty Cycle Effects on the Combined System in a Two-Rotor Coaxial Setup
3.2. Additional Coaxial Rotors
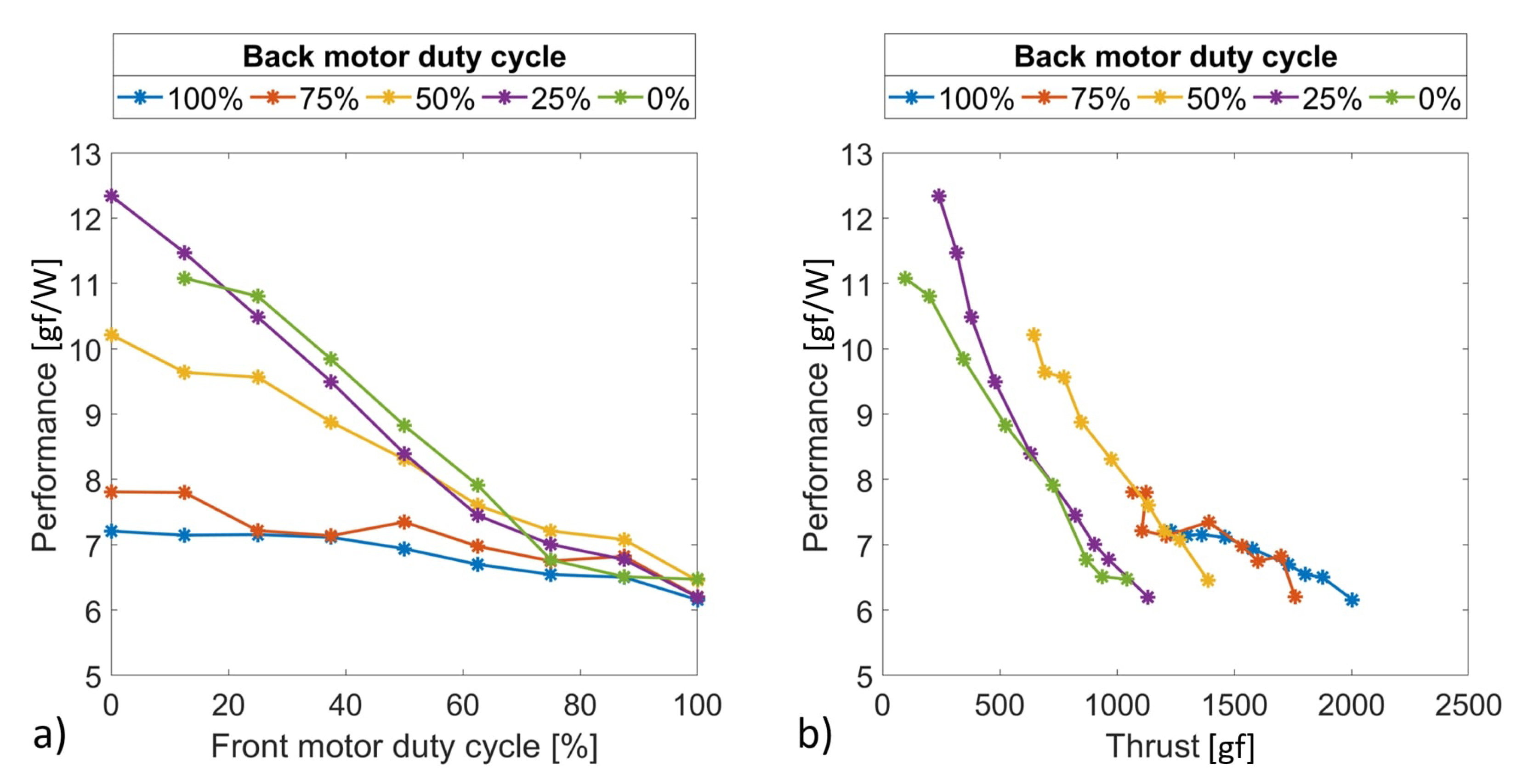
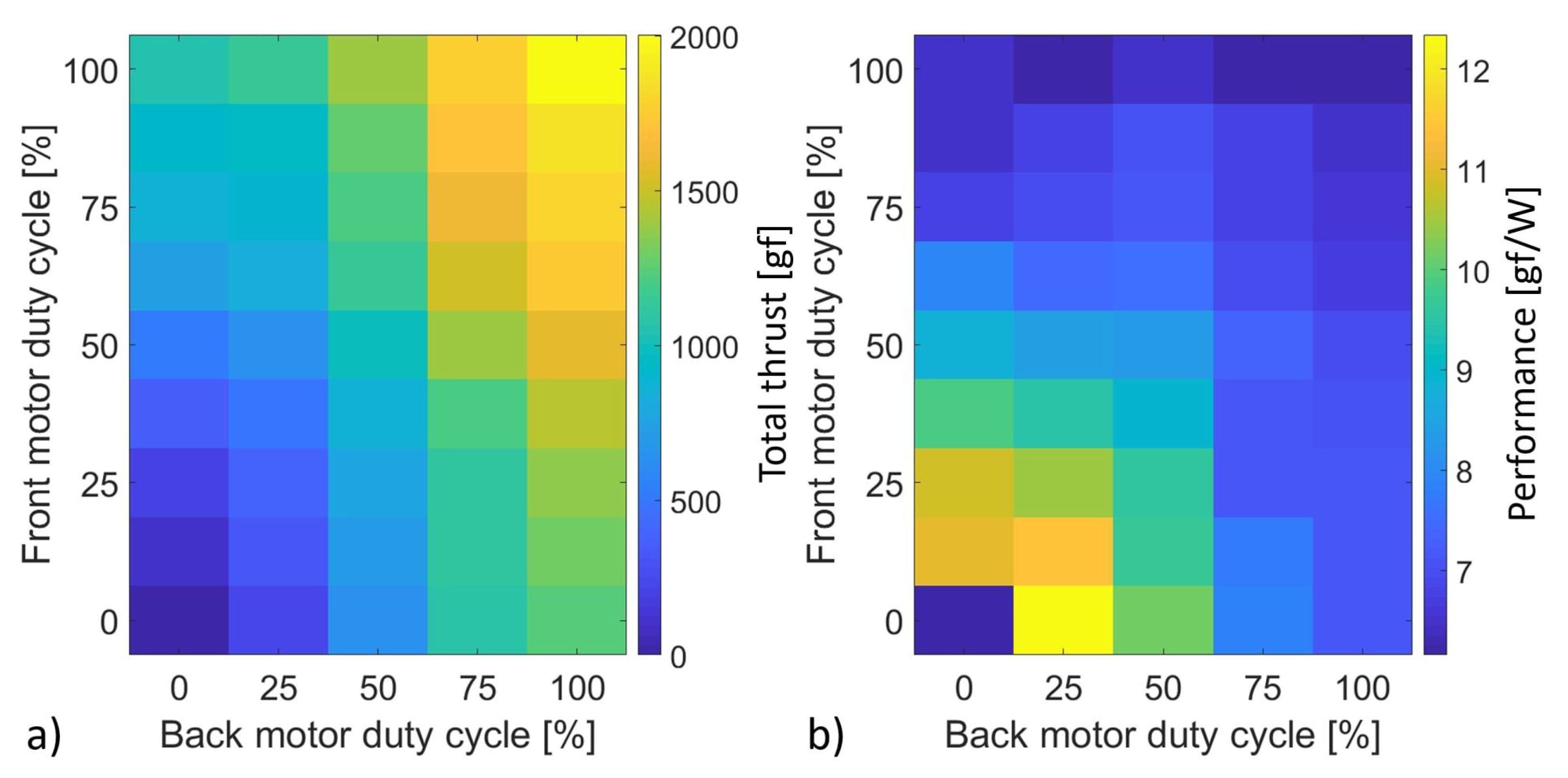
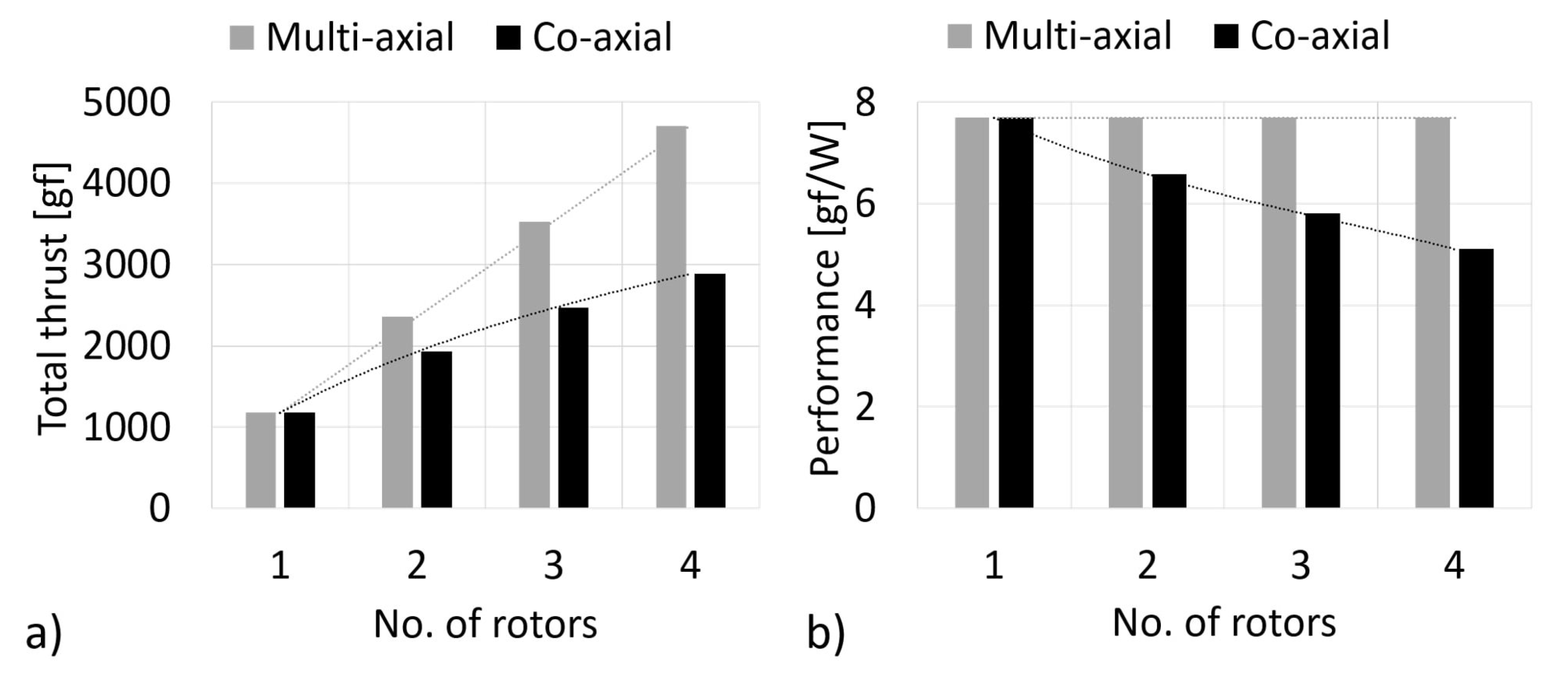
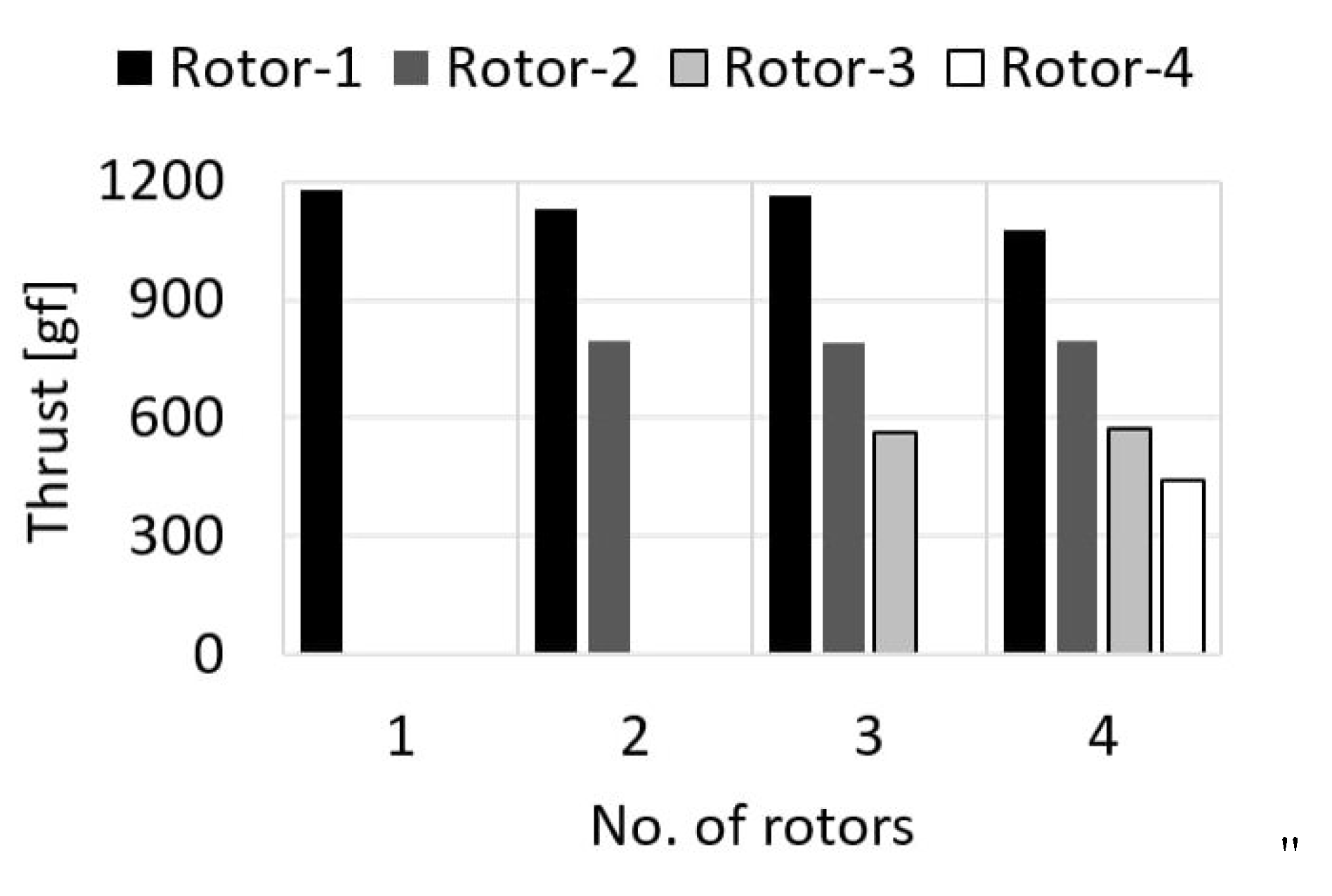
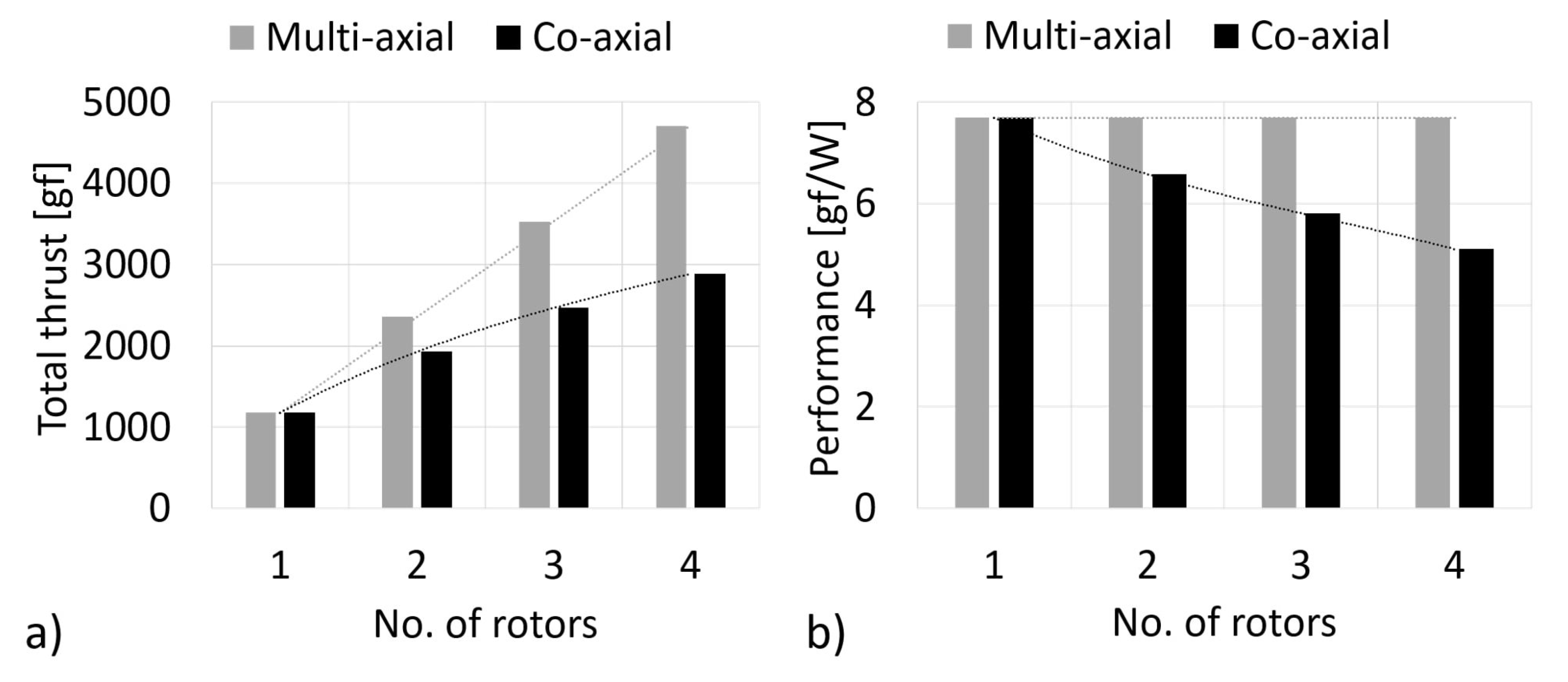
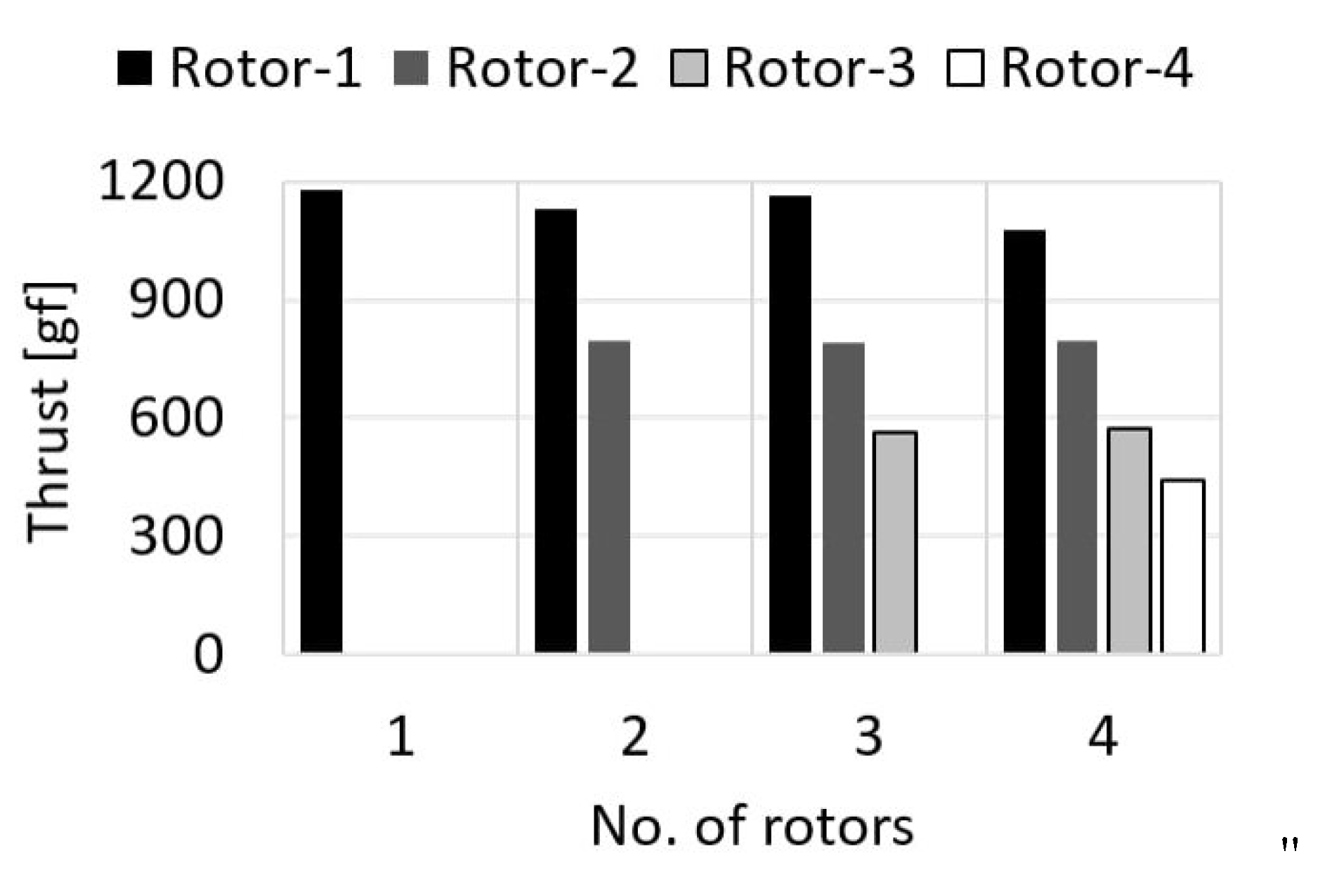
3.2.1. Thrust and Performance Variations
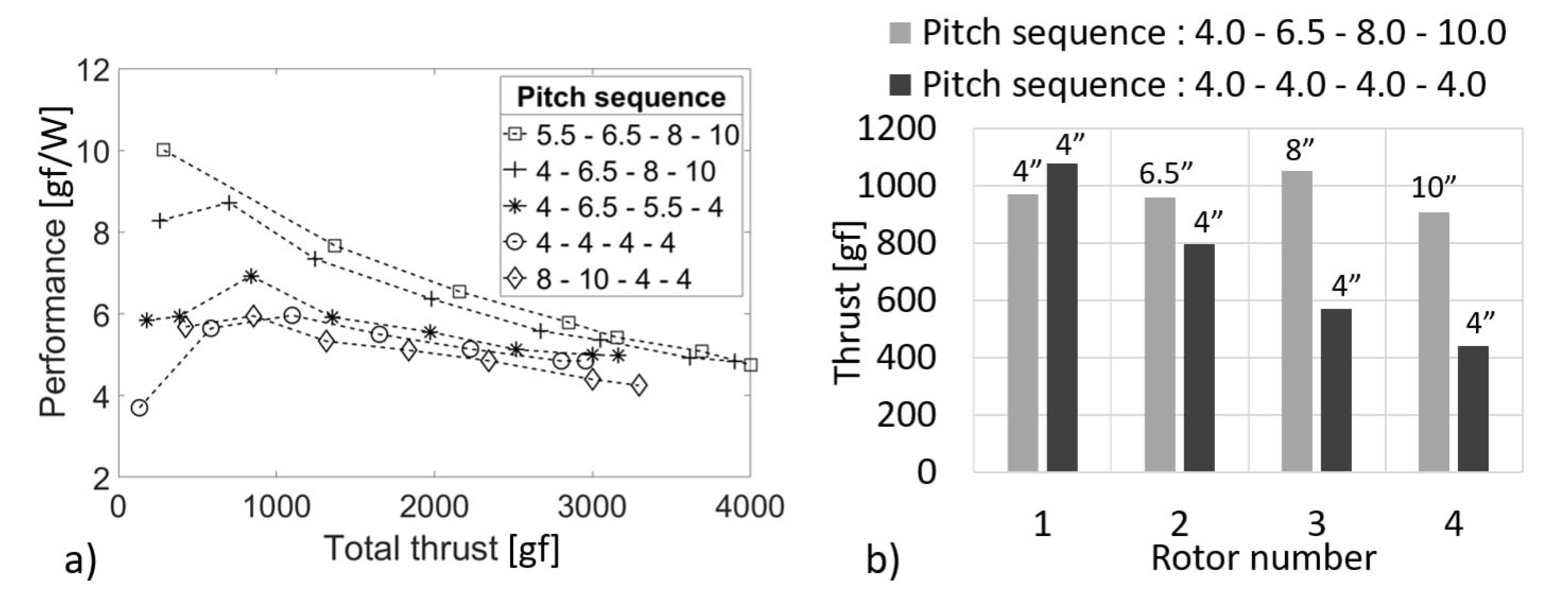
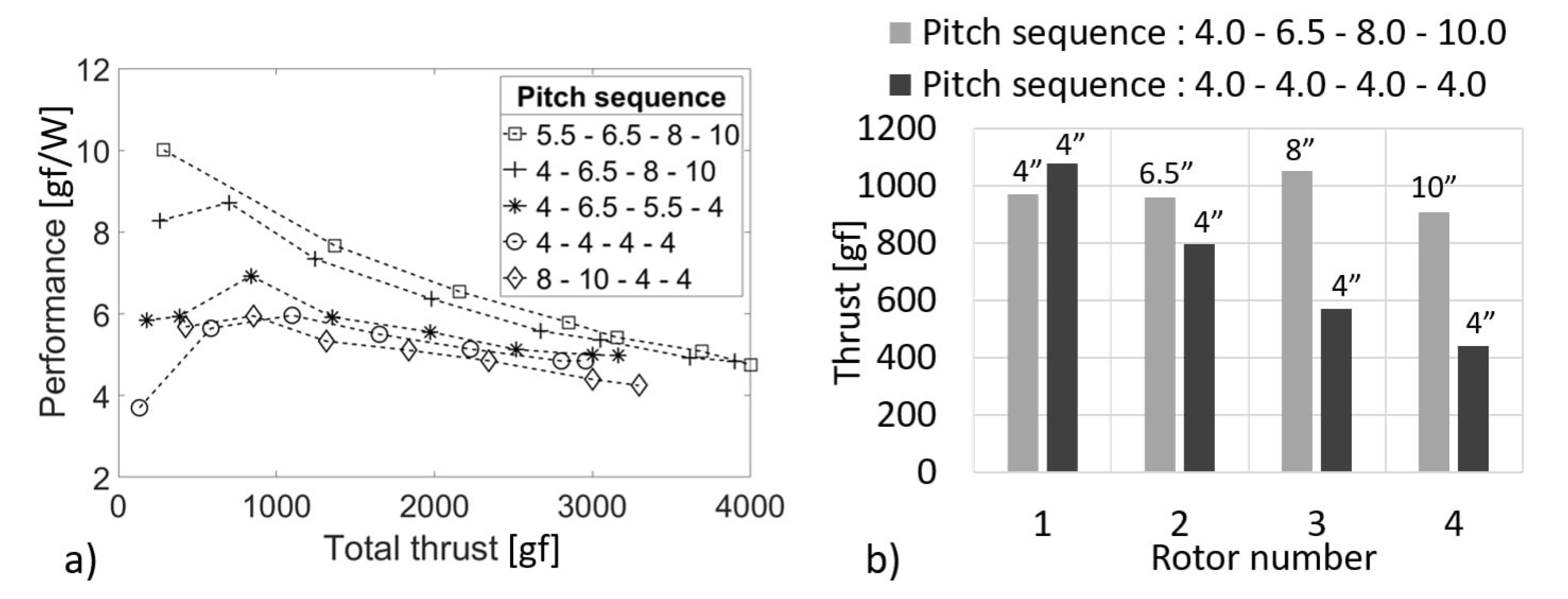
3.2.2. Pitch Variation in a Four-Rotor Coaxial System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BLDC | Brush-Less Direct Current |
| DC | Direct Current |
| eVTOL | Electric Vertical Take-Off and Landing |
| UAV | Unmanned Aerial Vehicle |
| PWM | Pulse Width Modulation |
| DAQ | Data Acquisition |
| RPM | Rotation Per Minute |
References
- Leishman, J.G. The Bréguet-Richet Quad-Rotor Helicopter of 1907. Vertiflite 2001, 47, 58–60. [Google Scholar]
- Wang, Q. The Current Research Status and Prospect of Multi-rotor UAV. IOSR J. Mech. Civ. Eng. 2017, 14, 31–35. [Google Scholar] [CrossRef]
- Puttock, A.; Cunliffe, A.; Anderson, K.; Brazier, R.E. Aerial photography collected with a multirotor drone reveals impact of Eurasian beaver reintroduction on ecosystem structure. J. Unmanned Veh. Syst. 2015, 3, 123–130. [Google Scholar] [CrossRef]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-based and UAV-based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Velusamy, P.; Rajendran, S.; Mahendran, R.K.; Naseer, S.; Shafiq, M.; Choi, J.G. Unmanned Aerial Vehicles (UAV) in precision agriculture: Applications and challenges. Energies 2021, 15, 217. [Google Scholar] [CrossRef]
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C. Unmanned Aerial Aircraft Systems for transportation engineering: Current practice and future challenges. Int. J. Transp. Sci. Technol. 2016, 5, 111–122. [Google Scholar] [CrossRef]
- Yeong, S.; King, L.; Dol, S. A Review on Marine Search and Rescue Operations Using Unmanned Aerial Vehicles. Int. J. Mech. Aerosp. Ind. Mechatron. Manuf. Eng. 2015, 9, 396–399. [Google Scholar] [CrossRef]
- Ollero, A.; Merino, L. Unmanned aerial vehicles as tools for forest-fire fighting. For. Ecol. Manag. 2006, 234, 263–274. [Google Scholar] [CrossRef]
- Thiels, C.A.; Aho, J.M.; Zietlow, S.P.; Jenkins, D.H. Use of Unmanned Aerial Vehicles for Medical Product Transport. Air Med J. 2015, 34, 104–108. [Google Scholar] [CrossRef]
- Li, Y.; Liu, C. Applications of multirotor drone technologies in construction management. Int. J. Constr. Manag. 2019, 19, 401–412. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A detailed survey and future directions of unmanned aerial vehicles (uavs) with potential applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Vas, E.; Lescroël, A.; Duriez, O.; Boguszewski, G.; Grémillet, D. Approaching birds with drones: First experiments and ethical guidelines. Biol. Lett. 2015, 11, 20140754. [Google Scholar] [CrossRef] [PubMed]
- Johnson, W.; Silva, C. NASA concept vehicles and the engineering of advanced air mobility aircraft. Aeronaut. J. 2022, 126, 59–91. [Google Scholar] [CrossRef]
- Maia, M.M.; Soni, P.; Diez, F.J. Demonstration of an aerial and submersible vehicle capable of flight and underwater navigation with seamless air-water transition. arXiv 2015, arXiv:1507.01932. [Google Scholar]
- Villegas, A.; Mishkevich, V.; Gulak, Y.; Diez, F.J. Analysis of key elements to evaluate the performance of a multirotor unmanned aerial–aquatic vehicle. Aerosp. Sci. Technol. 2017, 70, 412–418. [Google Scholar] [CrossRef]
- Ramasamy, M. Hover Performance Measurements Toward Understanding Aerodynamic Interference in Coaxial, Tandem, and Tilt Rotors. J. Am. Helicopter Soc. 2015, 60, 1–17. [Google Scholar] [CrossRef]
- Ravell, D.A.M.; Maia, M.M.; Diez, F.J. Modeling and Control of Unmanned Aerial/Underwater Vehicles using Hybrid Control. Control Eng. Pract. 2018, 76, 112–122. [Google Scholar] [CrossRef]
- Bondyra, A.; Gardecki, S.; Gasior, P.; Giernacki, W. Performance of Coaxial Propulsion in Design of Multi-rotor UAVs. In Proceedings of the Challenges in Automation, Robotics and Measurement Techniques, Warsaw, Poland, 2–4 March 2016; pp. 523–531. [Google Scholar] [CrossRef]
- Harrington, R.D. Full-Scale-Tunnel Investigation of the Static-Thrust Performance of a Coaxial Helicopter Rotor; Technical Note NACA-TN-2318; National Advisory Committee for Aeronautics, Langley Aeronautical Lab: Langley Field, VA, USA, 1951. [Google Scholar]
- Coleman, C.P. A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic Research; Technical Report NASA-TP-3675; NASA Ames Research Center: Moffett Field, CA, USA, 1997.
- Taylor, M.K. A Balsa-Dust Technique for Air-Flow Visualization and Its Application to Flow through Model Helicopter Rotors in Static Thrust; Technical Note NACA-TN-2220; National Advisory Committee for Aeronautics, Langley Aeronautical Lab: Langley Field, VA, USA, 1950. [Google Scholar]
- McAlister, K.; Tung, C.; Rand, O.; Khromov, V.; Wilson, J. Experimental and numerical study of a model coaxial rotor. In Proceedings of the American Helicopter Society 62nd Annual Forum, Phoenix, AZ, USA, 9–11 May 2006. [Google Scholar]
- Jinghui, D.; Feng, F.; Huang, S.; Lin, Y. Aerodynamic characteristics of rigid coaxial rotor by wind tunnel test and numerical calculation. Chin. J. Aeronaut. 2019, 32, 568–576. [Google Scholar] [CrossRef]
- Lim, J.W.; McAlister, K.W.; Johnson, W. Hover Performance Correlation for Full-Scale and Model-Scale Coaxial Rotors. J. Am. Helicopter Soc. 2009, 54, 1–14. [Google Scholar] [CrossRef]
- Wang, C.; Huang, M.; Peng, X.; Zhang, G.; Tang, M.; Wang, H. Wind Tunnel Studies on Hover and Forward Flight Performances of a Coaxial Rigid Rotor. Aerospace 2021, 8, 205. [Google Scholar] [CrossRef]
- Zimmer, H. The Aerodynamic Calculation of Counter Rotating Coaxial Rotors. In Proceedings of the Eleventh European Rotorcraft Forum, London, UK, 10–13 September 1985. [Google Scholar]
- Leishman, J.G.; Ananthan, S. An Optimum Coaxial Rotor System for Axial Flight. J. Am. Helicopter Soc. 2008, 53, 366–381. [Google Scholar] [CrossRef]
- Xu, H.; Ye, Z. Numerical Simulation of Unsteady Flow Around Forward Flight Helicopter with Coaxial Rotors. Chin. J. Aeronaut. 2011, 24, 1–7. [Google Scholar] [CrossRef]
- Bolandi, H.; Rezaei, M.; Mohsenipour, R.; Nemati, H.; Smailzadeh, S.M. Attitude control of a quadrotor with optimized PID controller. Intell. Control. Autom. 2013, 4, 342–349. [Google Scholar] [CrossRef]
- Brandt, J.; Selig, M. Propeller Performance Data at Low Reynolds Numbers. In Proceedings of the 49th AIAA Aerospace Sciences Meeting, Orlando, FL, USA, 4–7 January 2011. [Google Scholar] [CrossRef]
- Merchant, M.; Miller, L.S. Propeller Performance Measurement for Low Reynolds Number UAV Applications. In Proceedings of the 44th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 2006; AIAA Paper 2006-1127. p. 1127. [Google Scholar] [CrossRef]
- Brazinskas, M.; Prior, S.D.; Scanlan, J.P. An Empirical Study of Overlapping Rotor Interference for a Small Unmanned Aircraft Propulsion System. Aerospace 2016, 3, 32. [Google Scholar] [CrossRef]
- Buzzatto, J.; Liarokapis, M. A Benchmarking Platform and a Control Allocation Method for Improving the Efficiency of Coaxial Rotor Systems. IEEE Robot. Autom. Lett. 2022, 7, 5302–5309. [Google Scholar] [CrossRef]
- Simões, C.M. Optimizing a Coaxial Propulsion System to a Quadcopter; Technical Report; Instituto Superior Técnico: Lisboa, Portugal, 2015. [Google Scholar]
- Lakshminarayan, V.K.; Baeder, J.D. Computational Investigation of Microscale Coaxial-Rotor Aerodynamics in Hover. J. Aircr. 2010, 47, 940–955. [Google Scholar] [CrossRef]
- Lei, Y.; Bai, Y.; Xu, Z.; Gao, Q.; Zhao, C. An experimental investigation on aerodynamic performance of a coaxial rotor system with different rotor spacing and wind speed. Exp. Therm. Fluid Sci. 2013, 44, 779–785. [Google Scholar] [CrossRef]
- Uehara, D.; Sirohi, J.; Bhagwat, M.J. Hover Performance of Corotating and Counterrotating Coaxial Rotors. J. Am. Helicopter Soc. 2020, 65, 1–8. [Google Scholar] [CrossRef]
- Lee, Y.B.; Park, J.S. Hover Performance Analyses of Coaxial Co-Rotating Rotors for eVTOL Aircraft. Aerospace 2022, 9, 152. [Google Scholar] [CrossRef]
- Biber, K. Determination of propeller pitch stops for a turboprop airplane. In Proceedings of the 38th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2000; p. 497. [Google Scholar] [CrossRef]
- Ostar-Exel, L. The Effects of Varying Diameter on Coaxial Propellers for the Propulsion of Multirotor Systems. Ph.D. Thesis, Rutgers University-School of Graduate Studies, Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Ong, W.; Srigrarom, S.; Hesse, H. Design methodology for heavy-lift unmanned aerial vehicles with coaxial rotors. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 2095. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameter (in) | Pitch (in) | Material | Factor k |
|---|---|---|---|
| 13 | 4.0 | Glass fiber | 7.758 |
| 13 | 4.4 | Carbon fiber | 6.180 |
| 13 | 5.5 | Glass fiber | 6.570 |
| 13 | 6.5 | Glass fiber | 5.959 |
| 13 | 8.0 | Glass fiber | 5.605 |
| 13 | 10.0 | Glass fiber | 4.608 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prasad Rao, J.; Holzsager, J.E.; Maia, M.M.; Diez, J.F. Experimental Study into Optimal Configuration and Operation of Two-Four Rotor Coaxial Systems for eVTOL Vehicles. Aerospace 2022, 9, 452. https://doi.org/10.3390/aerospace9080452
Prasad Rao J, Holzsager JE, Maia MM, Diez JF. Experimental Study into Optimal Configuration and Operation of Two-Four Rotor Coaxial Systems for eVTOL Vehicles. Aerospace. 2022; 9(8):452. https://doi.org/10.3390/aerospace9080452
Chicago/Turabian StylePrasad Rao, Jubilee, Jonathan E. Holzsager, Marco M. Maia, and Javier F. Diez. 2022. "Experimental Study into Optimal Configuration and Operation of Two-Four Rotor Coaxial Systems for eVTOL Vehicles" Aerospace 9, no. 8: 452. https://doi.org/10.3390/aerospace9080452
APA StylePrasad Rao, J., Holzsager, J. E., Maia, M. M., & Diez, J. F. (2022). Experimental Study into Optimal Configuration and Operation of Two-Four Rotor Coaxial Systems for eVTOL Vehicles. Aerospace, 9(8), 452. https://doi.org/10.3390/aerospace9080452