1. Introduction
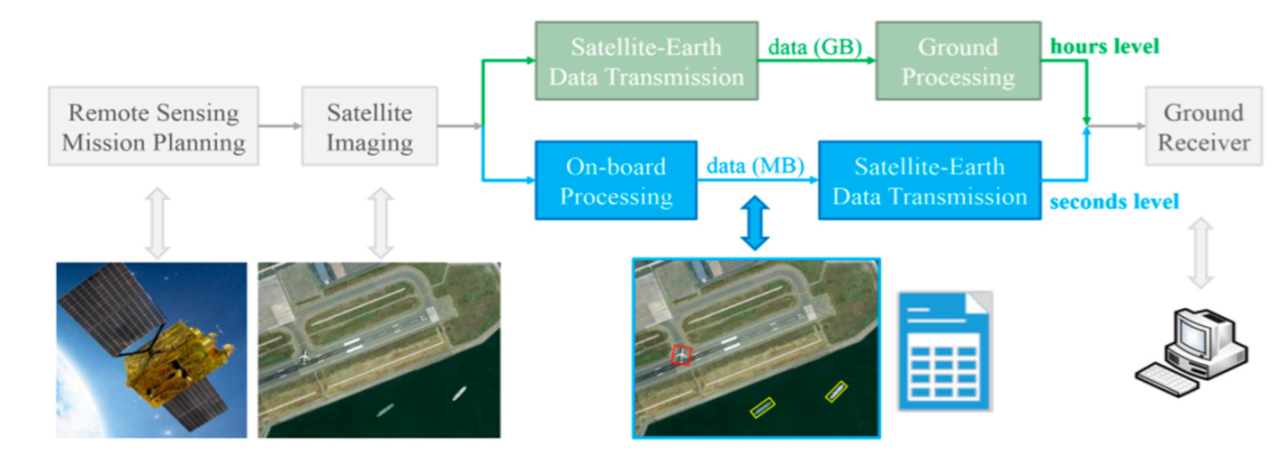
Aircraft activity recognition is of great significance in airport capability assessments and military intelligence acquisition, among other applications. Compared with ground-based monitoring methods, remote-sensing-based aircraft activity recognition can obtain results with wider coverage and more comprehensive information. Video satellites are a new type of earth observation satellite; compared with traditional remote sensing satellites, they can continuously observe a certain area and obtain more dynamic information using a staring mode. They are more suitable for tasks with time-sensitive characteristics, such as the recognition of aircraft activities at airports. However, it is difficult to meet the time requirements of emergency information acquisition with the traditional remote sensing process of detection, downlink transmission, and then processing. As shown in
Figure 1 (green), the traditional method has poor timeliness and brings a lot of pressure on satellite-to-ground data transmission. It can cost hours to acquire remote sensing information, and a huge amount of remote sensing data needs to be downloaded. In addition, due to the constraints of orbital dynamics, a single satellite cannot achieve global monitoring, or all-day monitoring, of a certain area.
To improve the coverage and duration of observations, satellite constellations are a good solution. However, more satellites mean higher budgets. Micro-satellites, on the other hand, have the advantages of low cost, a short development cycle, and the ability to form a network. A remote sensing satellite constellation based on micro-satellites is a better way to construct a global and all-day earth observation system. Additionally, on-board processing is the most straightforward way to improve the timeliness of observation tasks. As shown in
Figure 1 (blue), the remote sensing image was processed on-orbit before the results were downloaded. As a result, the transmission volume is smaller, and the timeliness is improved. In summary, based on the micro-satellite constellations and their on-board processing capabilities, we can build a highly time-efficient global and all-day earth observation system. Therefore, the on-board processing capability of a single video satellite becomes very important.
For the recognition of aircraft activities at airports, the onboard processing of aircraft detection and tracking must be solved first. However, this is not easy, as there are two challenges: the accuracy and efficiency requirements of the algorithm.
In satellite imagery, objects of interest are often small and possibly densely clustered. Typically, the image GSD of video micro-satellites is around one meter. This means that the common civil aircraft will only be approximately 50 × 50 pixels large in extent. Thus, targets have limited details in remote sensing images. Additionally, the objects can have arbitrary orientations when viewed from overhead [
1]. Considering the above aspects, the performance requirement of an aircraft detection algorithm is relatively high. The algorithm should have enough recall rate and precision, as well as good positioning accuracy.
In recent years, deep learning models, especially deep convolutional neural networks (DCNNs), have become state-of-the-art for many practical vision problems [
2,
3]. Many DCNN-based detectors have been proposed in the research field of object detection. DCNN-based detectors can be divided into two types: two-stage object detectors [
4,
5,
6,
7] and single-stage object detectors [
8,
9,
10,
11]. Two-stage object detectors have achieved promising results on common benchmarks; however, their training process is complex and computationally expensive. In contrast, single-stage object detectors are currently state-of-the-art with respect to the trade-off between speed and accuracy. For many practical applications, objects with large aspect ratios, dense distributions, and various orientations need to be detected; for example, in scene text detection or remote sensing object detection, objects can be arbitrarily oriented. The above-mentioned horizontal detectors have fundamental limitations for these applications. Thus, many rotation detectors [
12,
13] based on a general detection framework have been proposed. In remote sensing object detection, many rotation detectors have been proposed [
14,
15,
16,
17] and have achieved promising performances on large-scale public datasets for aerial images, e.g., DOTA [
18], HRSC2016 [
19], and OHD-SJTU [
20]. Among these remote sensing targets, the detection of aircraft achieved almost the best accuracy.
For object tracking, most modern computer vision approaches are based on tracking-by-detection [
21], where a set of possible objects are first identified via object detectors. Based on the detection results from each frame, a Kalman filter, particle filter, and probabilistic model are often used to accomplish accurate and consecutive object tracking. Meanwhile, deep learning methods have also attracted considerable interest in the visual tracking community as robust visual trackers. According to their architectures, state-of-the-art deep learning-based visual tracking methods are categorized as convolutional neural networks (CNNs) [
22,
23], Siamese neural networks (SNNs) [
24,
25], recurrent neural networks (RNNs) [
26], or generative adversarial networks (GANs) [
27]. Although these state-of-the-art methods have achieved significant progress, they are still not reliable for real-world applications.
To achieve on-board detection and tracking of aircraft in a remote sensing video, the usual tracking-by-detection methods are not feasible. This is because each detection procedure is computationally intensive, and the computing and memory resources of micro-satellites are limited. However, the excellent results achieved by rotation detectors in aircraft detection can serve as a good initial input for the tracking procedure. Thus, in this paper, an aircraft target tracking algorithm based on rotation detectors and image matching is proposed. First, aircraft detection was performed on the first incoming remote sensing image using a robust DCNN-based object detection model. Then, a multi-target tracking model based on image matching was proposed for efficient aircraft tracking. Finally, incorporating geospatial information, the aircraft activity was recognized in terms of its motion speed.
The main contributions of this paper are as follows:
Since the high-value activities of aircraft at an airport usually occur on the runway, we focus on detecting aircraft in the area around the runway. The smaller the detection area, the faster the detection procedure. Aircraft detection was implemented using a rotation detector named R3det.
The tracking algorithm can effectively cope with various challenging situations, such as the negative influence of various backgrounds and lighting conditions, self-rotation of aircraft, and aircraft entering and exiting.
Combining the results of aircraft tracking and geospatial information, aircraft activities were divided into parking, taxiing, and flying in terms of the aircraft’s motion speed. The satellite can selectively save and download the video data of interest according to the activity recognition results, reducing the amount of satellite-to-ground data transmission.
The algorithm was verified to be efficient and effective using remote sensing videos from commercial micro-satellites.
The remainder of this paper is organized as follows. In
Section 2, we outline our algorithm. In
Section 3, the deep convolutional neural network (DCNN) based aircraft detection is introduced. Aircraft tracking and activity recognition is introduced in
Section 4. In
Section 5, we evaluate our algorithm on real-world datasets which contain a variety of aircraft activities and provide the experimental results and a discussion. Finally, we present the conclusion in
Section 6.
2. Algorithm Overview
As shown in
Figure 2, the algorithm is mainly composed of two parts: aircraft detection (at the start, highlighted in yellow), and aircraft tracking and activity recognition (highlighted in blue).
A DCNN-based rotation detector, named R3Det, was used for aircraft detection at airports. Considering that the high-value activities of aircraft at airports usually occur on the runway, we focused on detecting aircraft in the area around the end of the runway. For satellites operating in staring mode, the location of the airport runway area in the image can be easily determined by combining satellite orbit, satellite attitude, and ground geographic information. The smaller the detection image size, the faster the detection speed. We can effectively reduce the time-consuming nature of detection in the start frame by focusing on detecting aircraft in the area around the end of the runway.
Due to the powerful rotation detector, the aircraft in the start frame are reliably detected and located with accurate envelopes. An efficient image matching method is then used to track the aircraft in subsequent frame images. The aircraft images detected in the start frame are used as the reference templates. The tracking procedure aims to find a part with the same size and the highest matching similarity as the template image within a certain search area in the current frame image. There are generally two approaches to solve this problem: grey value-based or feature-based matching. Compared with feature-based matching methods, such as edge-based matching [
28], grey-based matching methods can maintain high robustness in the face of changing lighting and background conditions. Thus, the NCC-based [
29] image matching method was used for tracking in this study. The corresponding search area image of each template was rotated within a certain angle range to generate multiple search area images. Matching of the template was then performed within these search area images. This can help find accurate matching results for some rotating aircraft targets, such as those that make turns.
The tracking process obtains the position of each aircraft in the image, as well as its movement over time. Combined with the resolution of the satellite image and the acquisition of time information, we can easily obtain the speed (km/h) of the aircraft. Depending on the speed of each aircraft, its activity can be classified as parking, taxiing, or flying.
Aircraft entry and exit detection is performed around the borders of the image. Aircraft entry detection is performed through background segmentation and under a size constraint. Aircraft exit detection is a comprehensive judgment based on the disappearance of the aircraft, as well as its position and speed when it disappeared.
At the end of each loop, each template image and its corresponding search area are updated. Templates are periodically updated to cope with the influence of a changeable background. The next search area corresponding to each aircraft is instantly updated according to its current tracking result. This cycle continues, completing aircraft target tracking and activity recognition of subsequent images in turn.
3. DCNN-Based Aircraft Detection
DCNN-based rotation detectors have achieved good detection results on existing remote sensing datasets, especially for aircraft object detection. In this study, a rotation detector named R3Det [
14] was used for aircraft detection in the start frame.
Figure 3 shows the flowchart of aircraft detection based on the R3Det detector. The ResNet network [
30] was used as the R3Det detector’s backbone. Upon this, the feature pyramid network (FPN) and the feature refinement module (FRM) were constructed for rotation target prediction. The R3Det detector was fine-tuned with the DOTA1.0 dataset upon the pre-trained ResNet152 model. When detecting aircraft, an input image of an arbitrary size was divided into manageable slices (1100 × 1100 pixels) and each slice underwent the detecting process with our trained model [
1]. Partitioning takes place via a sliding window with the slice’s size and overlap (10% by default), as shown in
Figure 3.
We tested the aircraft detection detectors with 10 remote sensing images of different airports. The main parameters of the remote sensing images used for testing are shown in
Table 1. These remote sensing images have the following characteristics.
Includes multiple ground sampling distance (GSD) metrics from 0.2 m to 1.0 m.
The images contain multi-type aircraft of different sizes. The orientation, distribution, and painting type of the aircraft are arbitrary. Military and civil aircraft are all included.
The image includes areas such as airport runways, apron, etc.
Imaging conditions include no clouds and thin clouds.
The test results are shown in
Table 1. TP (true positive) represents a correct detection result. FN (false negative) represents a missed detection result. FP (false positive) represents false detected results.
Figure 4 shows the recall and precision for each test sample. Through analysis of the results, we concluded that:
- (1)
The smaller the ground sampling distance (GSD), the better the detection performance of aircraft targets.
- (2)
Missed detections mainly occurred in the detection of aircraft parked next to each other on the tarmac.
- (3)
False positives are helicopters wrongly detected as aircraft in low-resolution images.
Figure 5 shows some of the detection results. All aircraft in these images were accurately detected with confidences larger than 0.8. Both military (red dotted ellipse) and civilian aircraft (blue dotted ellipse) were accurately detected. Aircraft were also accurately detected in remote sensing images affected by thin clouds and fog, as in
Figure 5a,b. Aircraft densely parked on the tarmac (blue dotted ellipse), as well as aircraft taxiing on the runway (white dotted ellipses) were also accurately detected. Additionally, partially occluded aircraft in high-resolution remote sensing images were accurately detected (yellow ellipse).
As outlined in
Figure 2, results from the detection procedure were used as the input for the tracking and activity recognition procedure. At airports, high-value activities mainly occur on the runway and its surrounding areas. The tests verified that the algorithm has better detection performance on the runway and its surrounding areas. Therefore, in follow-up research on aircraft target tracking algorithms, we can focus on processing only the runway and its surrounding areas to ensure reliable detection of aircraft targets. This can not only reduce the amount of calculation for remote sensing image processing, but also improve the timeliness of aircraft activity recognition. The aircraft detector output results with high recall and accuracy, providing excellent initial conditions for subsequent aircraft tracking.
4. Aircraft Tracking and Activity Recognition
4.1. Flow of Aircraft Tracking and Activity Recognition
Using the DCNN-based rotation detector to detect the start frame, we identified the aircraft that needed to be tracked. To use the image matching method for aircraft tracking, we first obtained the template image of the aircraft from the rotation detection results. The aircraft in the template image is enveloped by a non-rotating bounding box, as shown in
Figure 6. The width and height of the rotation bounding box (purple rectangle) of the detected aircraft are
and
, respectively. The width and height of its corresponding horizontal bounding box (blue rectangle) are
and
, respectively. Thus, for the aircraft, the width of its template image is
, and the height is
.
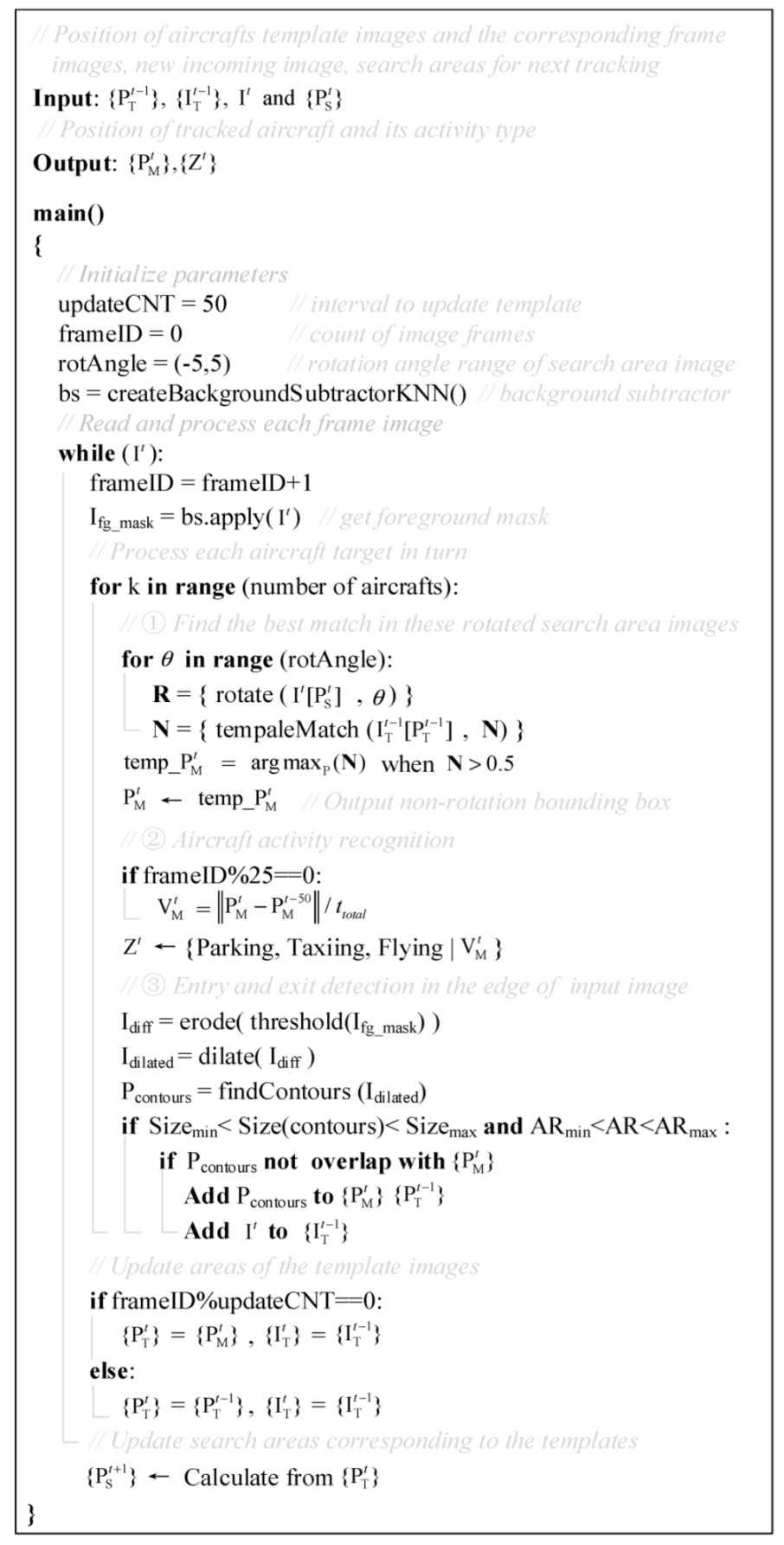
The next process is to locate each aircraft in subsequent images and recognize its activity type.
Figure 7 shows the algorithm for aircraft tracking and activity recognition. The algorithm processes each frame image in turn. In each loop, the algorithm mainly accomplishes four tasks.
Firstly, the algorithm searches for the best matching image for each aircraft within a certain search area. The search area is calculated based on the previous tracking result of the aircraft. The search area is centered on the aircraft and is twice its size. Before matching, the search area image with a certain step size is rotated within a certain angle range to obtain a batch of search area images. The best match for the aircraft target is then identified from this batch of images and the matching result is located. Finally, we identify the position of the matching result in the current input image and achieve tracking for the target aircraft. This matching method is not only suitable for aircraft with translation and turning motion, but can also effectively prevent mistaken tracking of nearby aircraft.
Secondly, the moving speed of each tracked aircraft is calculated using the multi-cycle backward difference method. The recognition result of the aircraft activity is then given according to its movement speed.
Thirdly, detection of newly entering objects at the edge of the field of view is performed based on the background subtraction method and size constraint. If the bounding box of the newly added target does not overlap with all the tracking results, it can be judged as another aircraft that needs to be tracked.
Additionally, the template image of the aircraft is periodically updated using the latest tracking results. Thus, the tracking procedure will have high adaptability to changeable or complex backgrounds.
4.2. NCC-Based Template Matching for Aircraft Tracking
The normalized correlation coefficient (NCC) [
29] based image matching method was used to achieve aircraft tracking. The template matching algorithm consists of two steps. First, both the aircraft template image and the image of the search area were normalized according to the following equations.
Here,
and
are the pixel values in the aircraft template image and search area image, respectively.
and
are the pixel values in the normalized aircraft template image and search area image, respectively.
are the width and height of the aircraft template image, and
are the width and height of the search area image. The normalized correlation coefficients of these two normalized images were then calculated.
Here, are the coordinates in the normalized aircraft template image, are the coordinates of the upper left corner of the square matching area in the normalized search area image, and is the value of the normalized correlation coefficient (NCC). The closer the value is to one, the more similar the template image and the image in the matching area of the search area image are.
On this basis, an aircraft tracking algorithm based on neighborhood search and matching was proposed.
Figure 8 shows the main flow of each tracking procedure, which consists of four steps.
Step 1: To track aircraft in an airport, the matching algorithm needs to be able to adapt to the matching of aircraft in translational and rotational motions. Thus, the search area image was first rotated with a certain step size (2°) within a certain angle range (−10°~10°) to obtain a batch of search area images. Then, NCC-based matching was performed between the aircraft template image T and all obtained search area images. We chose to rotate the search area image instead of rotating the aircraft template image, because rotating the template image generates invalid data at its edges, which seriously affects the matching result.
Step 2: The best match is identified as the matching result with the largest normalized cross-correlation coefficient. The coordinates at the center point of the best matching area in the search area image (the green center point) are identified according to the matching result.
Step 3: The search area image that contains the best match is transformed back to its original (non-rotated) state. Then, the coordinates at the center of the best matching area can be obtained, represented in the coordinate system of the original search area image (the red center point). Finally, the center point and the size of the aircraft template image are combined, and the matching result can be located in the original search area image (the red rectangle).
Step 4: The position of the matching result (the red rectangle) in the current input image is calculated; this is the tracking result of the aircraft in the current frame. According to the current tracking result, the search area for the next tracking procedure (yellow dotted rectangle) can be calculated. As outlined in
Figure 7, the aircraft template image is updated using the tracking result every 50 tracking cycles.
Based on the combination of rotated image matching and a neighborhood search, the tracking process can achieve good performance. On the one hand, based on the design of rotated image matching, the algorithm enables stable tracking of aircraft with translational and turning motions. During the aircraft tracking procedure of our algorithm, the aircraft search area is only twice the size of the currently tracked aircraft. Usually, there is a certain safety distance between aircraft targets in their working state. Therefore, based on the neighborhood search and the safe working distance requirement of aircrafts, nearby aircraft do not enter the search area of the currently tracked aircraft. The algorithm can effectively prevent false tracking of nearby aircraft.
4.3. Aircraft Activity Recognition
The velocity of each tracked aircraft was calculated every 25 frames using the multi-cycle backward difference method. As shown in
Figure 9, the current speed was taken to be the total moving distance over the latest 50 frames divided by the total time,
. The calculation formula is as follows.
Here,
is the current speed,
is position of the tracked aircraft at the current frame,
is the position of the aircraft 50 frames away from the current frame, and
is the time elapsed while the aircraft moved from position
to
. Thus, we can obtain a relatively stable speed measurement of the aircraft every other 25 frames. Finally, the recognition result of the aircraft’s activity can be given based on the speed of the aircraft:
Here, we considered the possible positioning error caused by matching aircraft in the rotated search area image. If the movement of the aircraft is less than two pixels, the aircraft is considered to be in the parking state. If its speed exceeds 230 km/h, the aircraft is considered to be in the flying state. In other cases, it is considered to be in the taxiing state.
4.4. Aircraft Entry and Exit Detection
For satellites operating in staring mode, the airport background changes slightly in the acquired video images. Therefore, we use the background subtraction method [
31] to detect new incoming aircraft. To further reduce the amount of computation, we only detect new incoming aircraft around the edges of the image. The size of the edge range for the detection operation is equal to the size of the largest aircraft in the current field of view. Aircraft entry detection includes the following five operations:
Build a KNN-based background subtractor for background detection.
Obtain the foreground mask image and perform image binarization processing.
Morphologically process candidates in the foreground region based on the rectangular kernel.
Eliminate obviously wrong results within dimensional constraints. A target whose size is smaller than 90% of the smallest aircraft size or larger than 110% of the largest aircraft size in the current field of view is considered to be obviously wrong.
Judge whether the candidate result is the tracked aircraft that has moved into the edge area. This can be easily achieved by judging whether their bounding boxes overlap.
Aircraft exit detection is simpler. If an aircraft fails to be tracked for 25 consecutive frames, and its latest tracked position was in the image boundary area, the aircraft is considered to have exited.
5. Experiments and Results
5.1. Platform and Datasets
The algorithm proposed in this paper is only suitable for video satellites working in staring mode. Thus, we used remote sensing videos from commercial video satellites to perform experimental validation of the proposed algorithm.
From
Section 3 we know that the smaller the GSD (ground sample distance) of remote sensing images, the better the detection performance of the algorithm. Considering the size differences of different types of aircraft, we suggest that the GSD of video remote sensing images should be approximately 1 m or less than 1 m. Therefore, two video instances of high resolution with a GSD of less than 1 m (0.92 m), and low resolution with a GSD of larger than 1 m (1.13 m), are used for verification here.
Table 2 outlines the main parameters of the two remote sensing videos. These two videos have a frame rate of 25 fps but are of different image sizes. The scenes in both videos are at the end of an airport runway and its surrounding environment.
The complete algorithm was deployed and tested on an embedded AI processor called NVIDIA Jetson AGX Xavier.
5.2. Experimental Results
Figure 10 shows some screenshots of the experimental results on test video 1. The image shows the end of an airport runway and its adjacent farmland. There are five aircraft in the image. The three aircraft parked at the top of the picture are relatively small in size. Some of the aircraft have tones similar to their nearby environmental backgrounds and are not clearly visible in the image.
Figure 10a shows the aircraft detection results in the start frame. The aircraft were detected with the DCNN-based rotation detector described in
Section 3. The five aircraft were all correctly detected in the start frame and located with purple bounding boxes. As shown in
Figure 10b, the five detected aircraft were treated as targets that needed to be tracked in the following frames. These aircraft were assigned different identification numbers and were located using different colored bounding boxes. In subsequent frames, the algorithm tracked the five aircraft using image matching and measured their speed to identify the type of activity. The measured speed and recognized activity status of each aircraft were updated every 25 frames. The current activity status of the aircraft was displayed using different colors: parking was displayed in yellow, taxiing was displayed in green, and flying was displayed in blue. As shown in
Figure 10c,d, all five aircraft were continuously and correctly tracked. Three aircraft (Aircraft 2, 3, and 4) that were parked on the tarmac were correctly identified to be parking. Aircraft 0, taxiing on the runway, was correctly recognized to be taxiing. Aircraft 1 was correctly recognized to be flying.
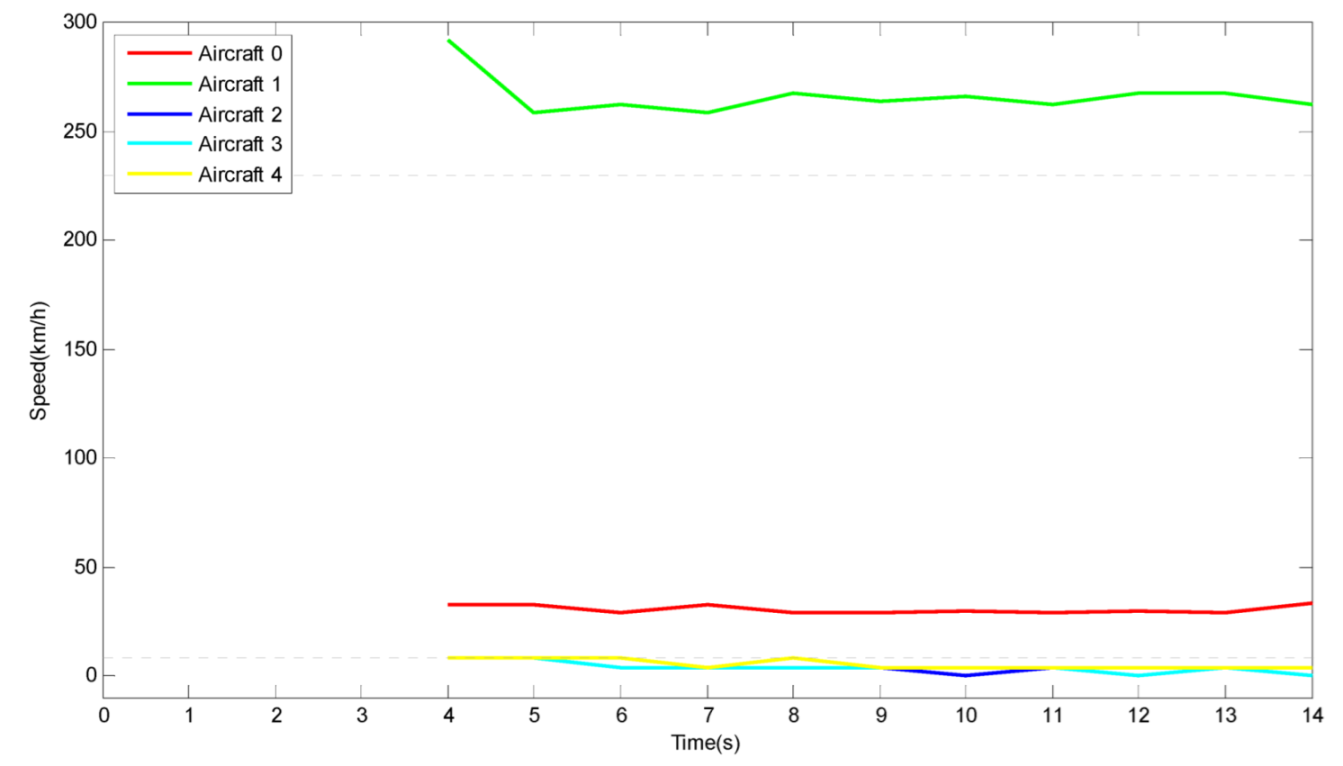
Figure 11 shows the speed vs. time curves for every tracked aircraft in Video 1. Curves of five different colors represent the five different aircraft targets. The two horizontal dashed lines in the figure represent the speed thresholds used to divide the three different aircraft activities. When the aircraft speed is in the lowest zone, the state of the aircraft is parking. When the aircraft speed is in the middle zone, the state of the aircraft is taxiing. When the aircraft speed is in the upper zone, the state of the aircraft is flying.
From the experimental test results in Video 1, the algorithm is identified as having the following advantages. Firstly, the algorithm supports the reliable detection and stable tracking of weak and small aircraft targets (e.g., Aircraft 4). Secondly, the algorithm can stably track aircraft at different speeds. Thirdly, the algorithm can accurately track aircraft targets under complex and changeable backgrounds (e.g., Aircraft 1). Lastly, based on the aircraft tracking and speed measurement, the algorithm can further identify the current activity status of the aircraft.
In
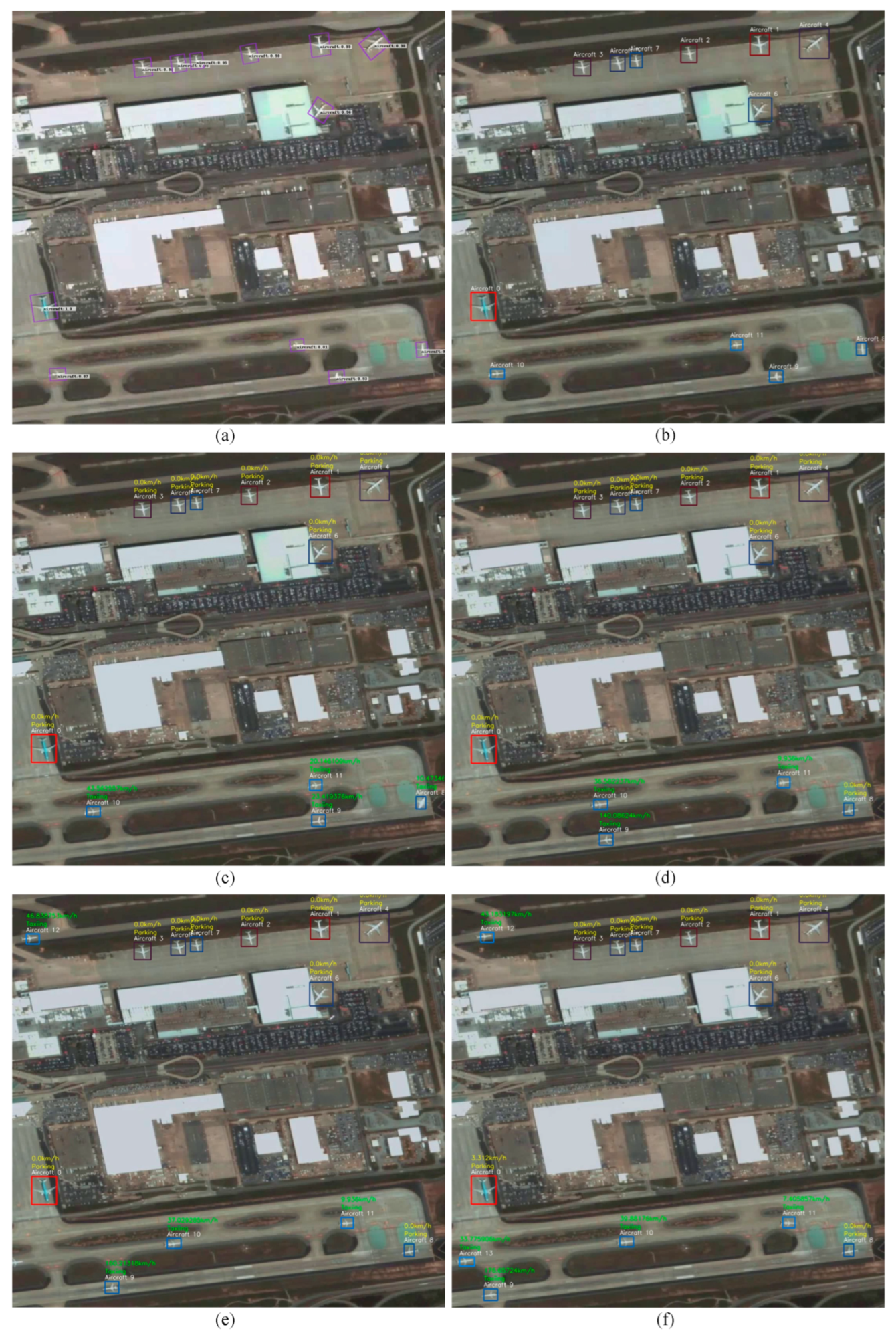
Figure 12, some screenshots of the experimental results from Video 2 are displayed. The images show the end of an airport runway and its adjacent apron. There are more aircraft in the remote sensing images, and they are of various shapes and sizes. In addition, the motion of the aircraft in the remote sensing images is more complex.
Figure 12a shows the aircraft detection results in the start frame. All twelve aircraft in the image were accurately detected and located with purple bounding boxes. As shown in
Figure 12b, the twelve detected aircraft were treated as targets that needed to be tracked in the following frames. They were assigned different identification numbers and were located using different colored bounding boxes. In subsequent frames, each aircraft was tracked, and its activity status was given based on its velocity measurement. At the beginning, the top eight aircraft (Aircraft 0~Aircraft 7) were parked, and the bottom four aircraft (Aircraft 8~Aircraft 11) were queuing to take off (as shown in
Figure 12c). Later, the first aircraft on the runway took off, and the next aircraft turned around and was ready to take off (
Figure 12d). At the end of the video, two taxiing aircraft enter from the left side of the field of view (
Figure 12e,f).
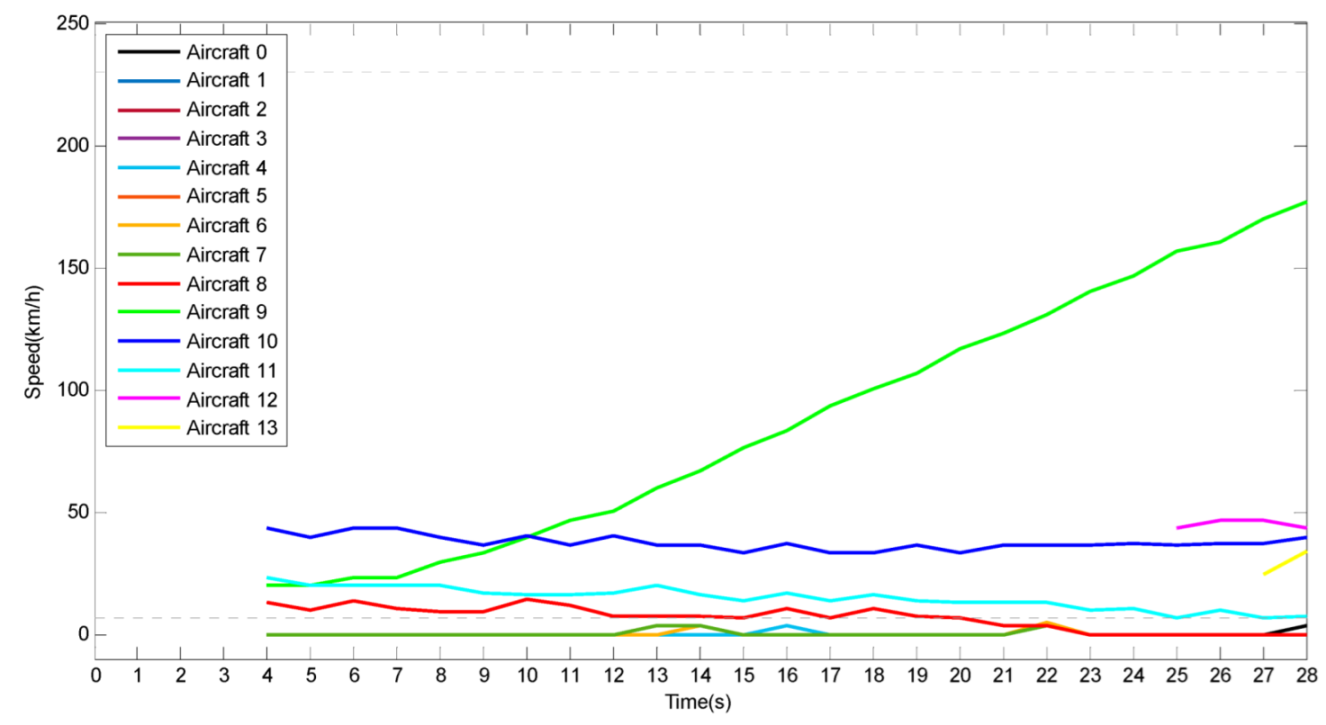
Figure 13 shows the speed vs. time curves for every tracked aircraft in Video 2, similar to
Figure 11. Curves of fourteen different colors represent the fourteen different aircraft targets in Video 2. At the 25th second, the algorithm obtains the speed measurement of the newly entered Aircraft 12. Similarly, the algorithm obtains the speed measurement of the newly entered Aircraft 13 at the 27th second.
From the experimental results in Video 2, we can conclude that the algorithm has the following advantages. Firstly, the algorithm supports the stable tracking of turning aircraft (e.g., Aircraft 8) due to the improved rotation matching method. Secondly, the algorithm has strong robustness, even under complex lighting conditions. As shown in
Figure 12c, there was a great deal of light reflected on the surface of Aircraft 8, but the algorithm can still track it stably. Lastly, the algorithm supports the detection of newly entered aircraft. As shown in
Figure 12e,f, the newly entered Aircraft 12 and 13 were accurately detected. They were then accurately tracked, and their activity status was identified.
We also tested and compared the time-consumption of the algorithm on an RTX2080Ti-based server and on the embedded AI computing unit called Jetson AGX Xavier.
Table 3 outlines the time-consuming statistics of the two experiments on different platforms. We evaluated the time consumption of the two main parts of the algorithm separately. DCNN-based aircraft detection takes approximately 4 s and 20 s on the server and embedded AI unit, respectively. Aircraft tracking and activity recognition takes less than 200 ms on both computing platforms. Video 2, which contains more aircraft targets, consumed more time. Compared with the traditional ground processing methods, the method in this paper significantly improves the efficiency of aircraft activity recognition and reduces the amount of satellite-to-ground data transmission. Although there is a delay of tens of seconds, the method in this paper can serve as an important reference for the exploration of on-board intelligent processing and satellite intelligent decision-making.
5.3. Discussion
The algorithm proposed in this paper offers a solution for the recognition of aircraft activity at airports. By combining the DCNN-based object detection and an improved template matching method, aircraft can be accurately detected and stably tracked, and its activity can be identified based on its speed. The algorithm can process aircraft targets of different sizes, and is equally effective under different complex environmental backgrounds, lighting conditions, and various movements of the aircraft, such as turning, entering, and exiting.
The algorithm’s time consumption has been evaluated on an embedded computing platform, where it exhibited a delay of tens of seconds in the two testing videos. However, compared with tracking-by-detection methods, the algorithm in this paper achieves a relatively efficient performance under the premise of ensuring high accuracy. Nonetheless, the algorithm can still effectively support applications in which short delays are acceptable, such as monitoring whether an airport is operating or not. Based on on-board dynamic event recognition, selective download of segment data of interest can be performed. Compared with traditional ground processing methods, the proposed method significantly improves the efficiency of event acquisition and reduces the amount of satellite-to-ground data transmission.
With appropriate improvements, the algorithm is expected to be used for time-critical tasks, such as real-time detection and tracking of take-off aircraft. These high-value dynamic events usually occur at the end of the runway. Therefore, geographic information can be incorporated to further narrow the range of images processed by the algorithm. By reducing the detection range and the number of aircraft in the field of view, the time consumption of the algorithm can be significantly reduced. Additionally, using satellites with on-board, real-time processing capabilities to form a constellation would enable the continuous real-time tracking of areas of interest and the relay tracking of moving targets.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}