
Landing Performance Study for Four Wheels Twin Tandem Landing Gear Based on Drop Test


Abstract
:1. Introduction
2. Four Wheels Twin Tandem Landing Gear
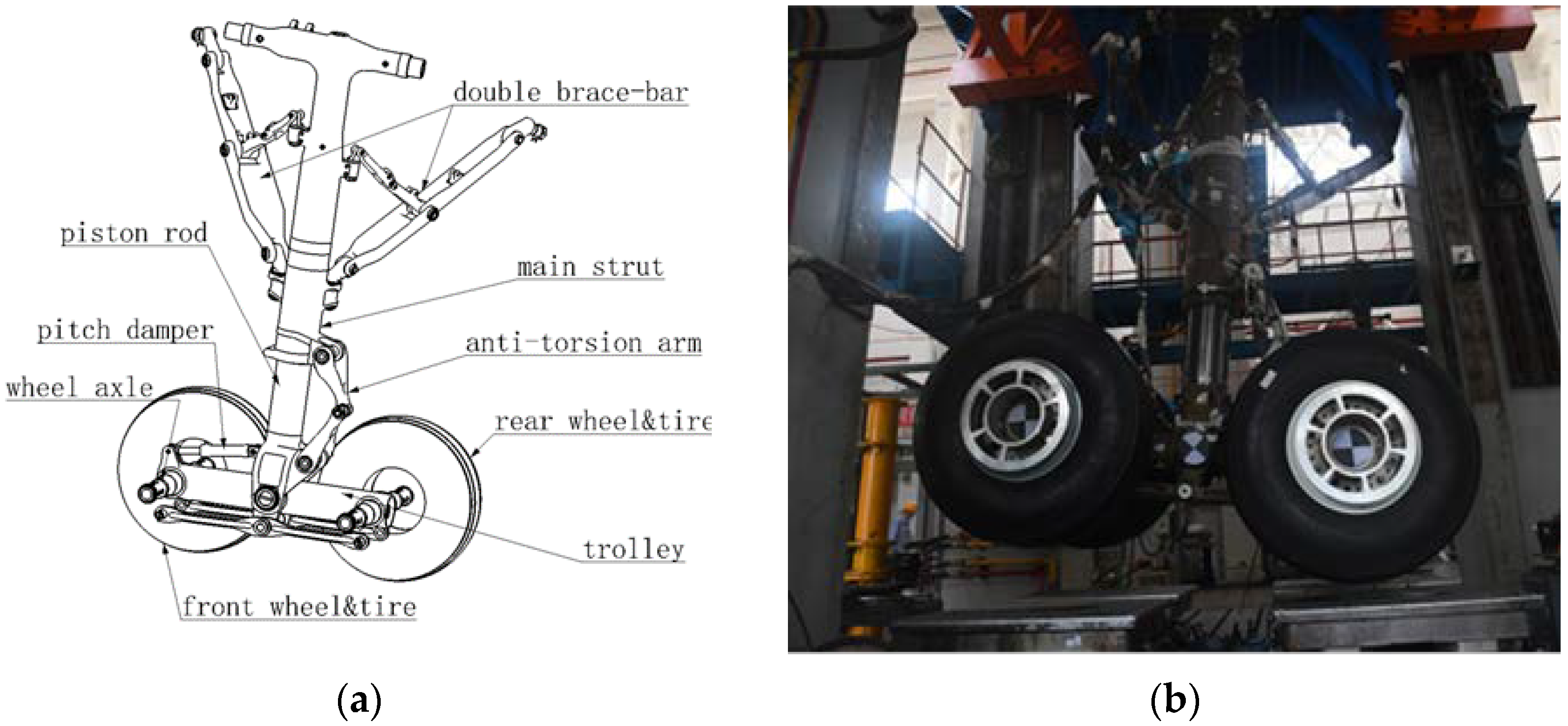
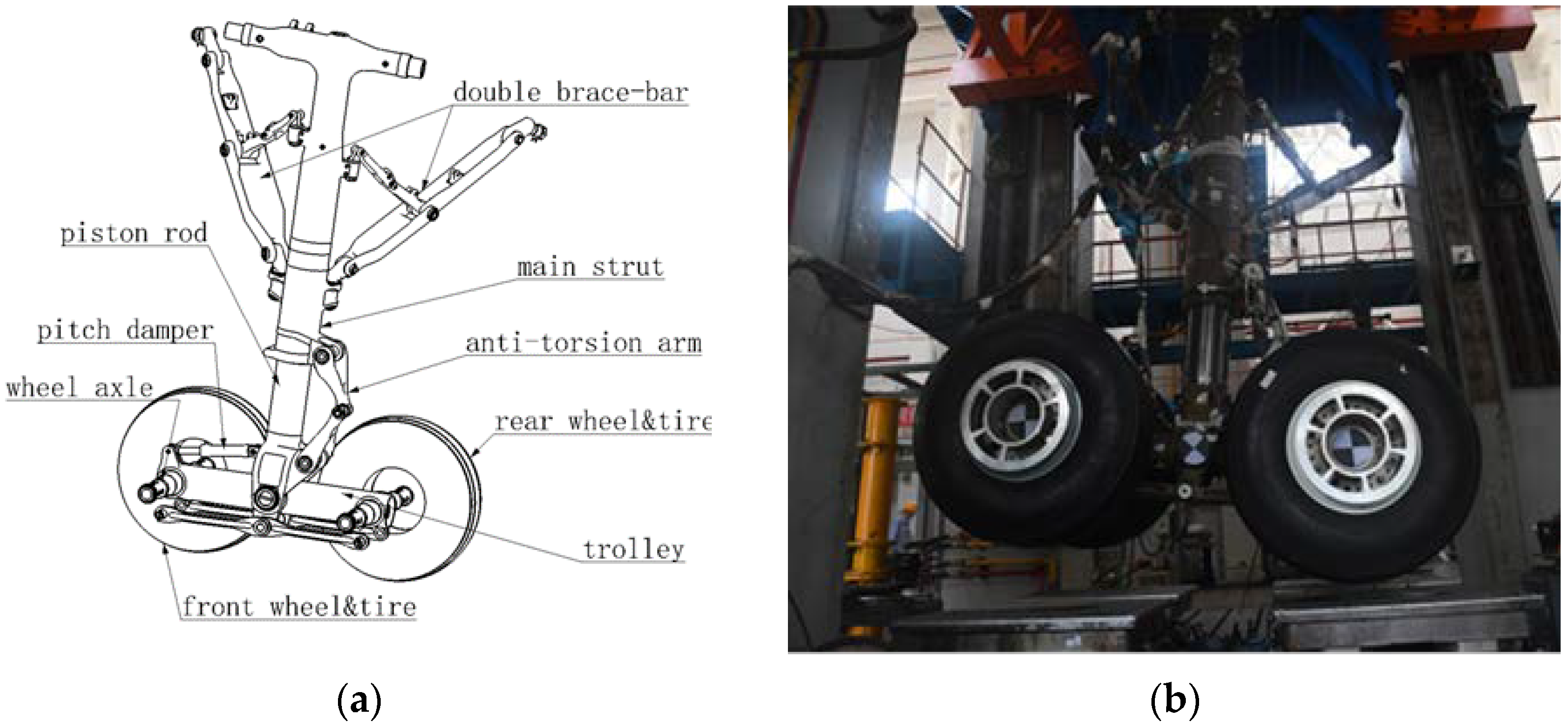
2.1. Structural Layout
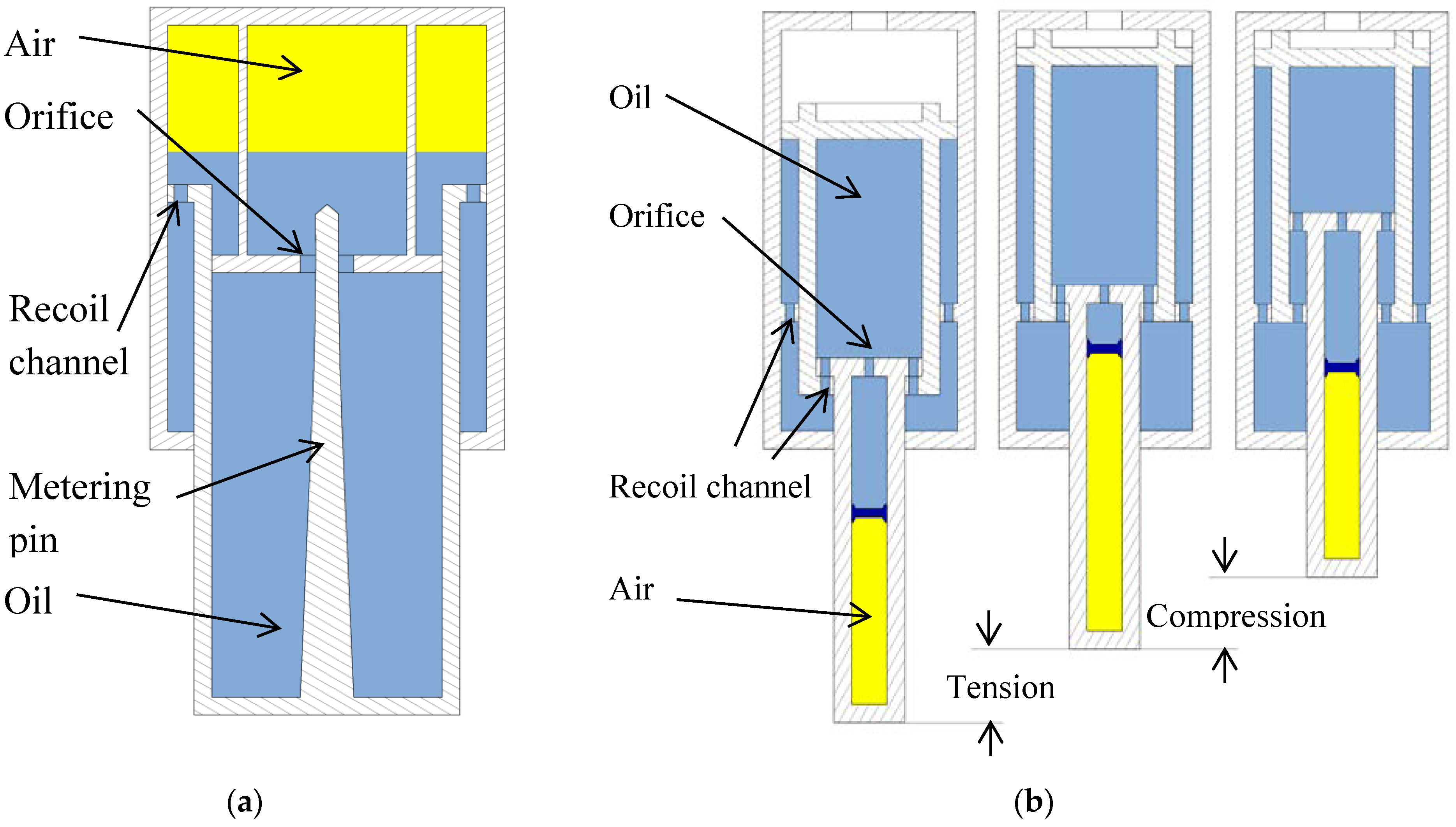
2.2. Main Buffer System
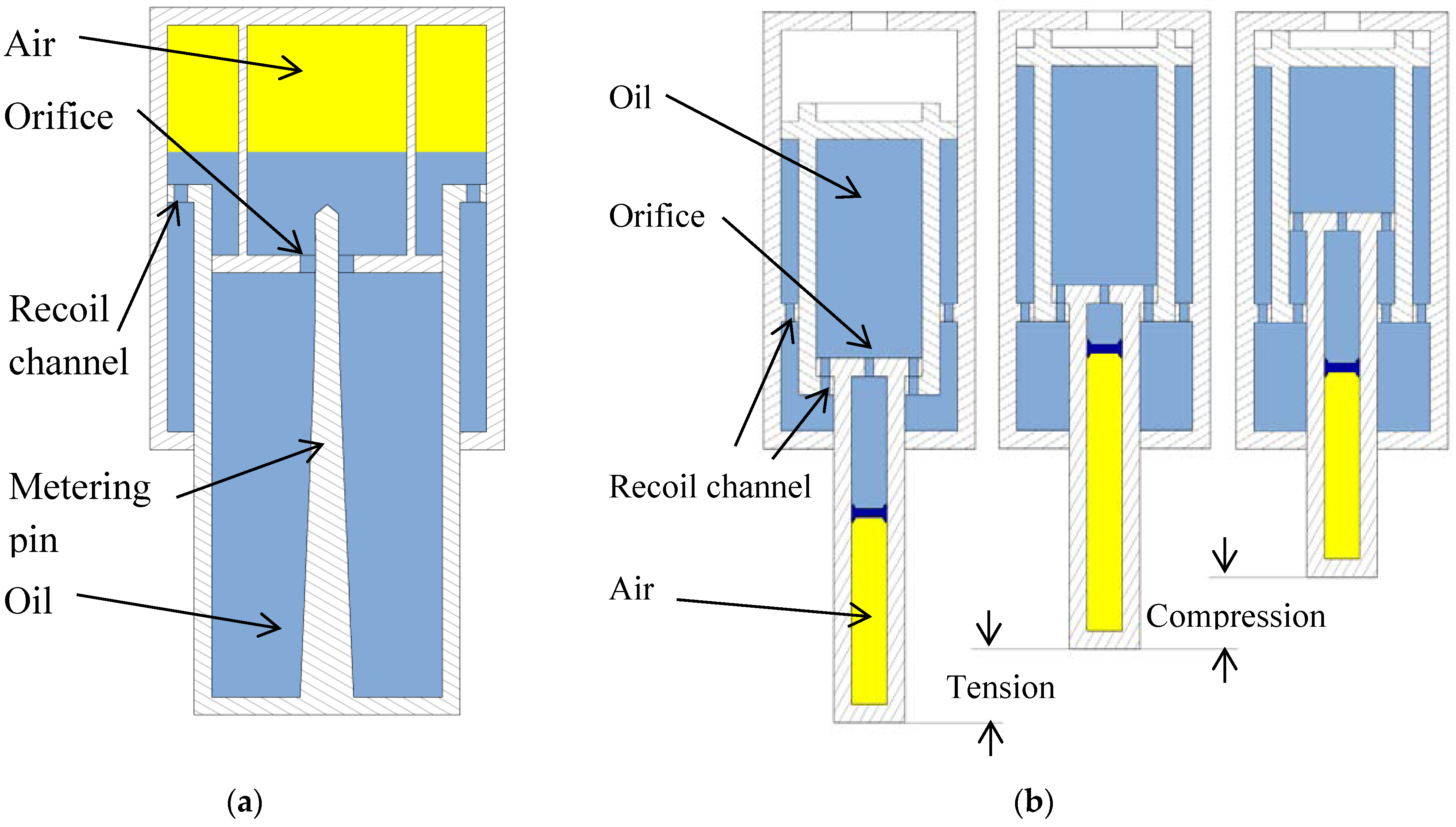
2.3. Pitch Damper
- During aircraft touching down, it stabilizes and keeps the trolley at the designed angle, so that the tires at the lower end can touch the ground first to increase the cushioning distance and decrease the overload.
- During touching down and ground taxiing, it assists to absorb and dissipate the energy caused by the pitching motion of the trolley and slow down this motion to reduce the ground reaction of the tire [12].
3. Introduction of Drop Test
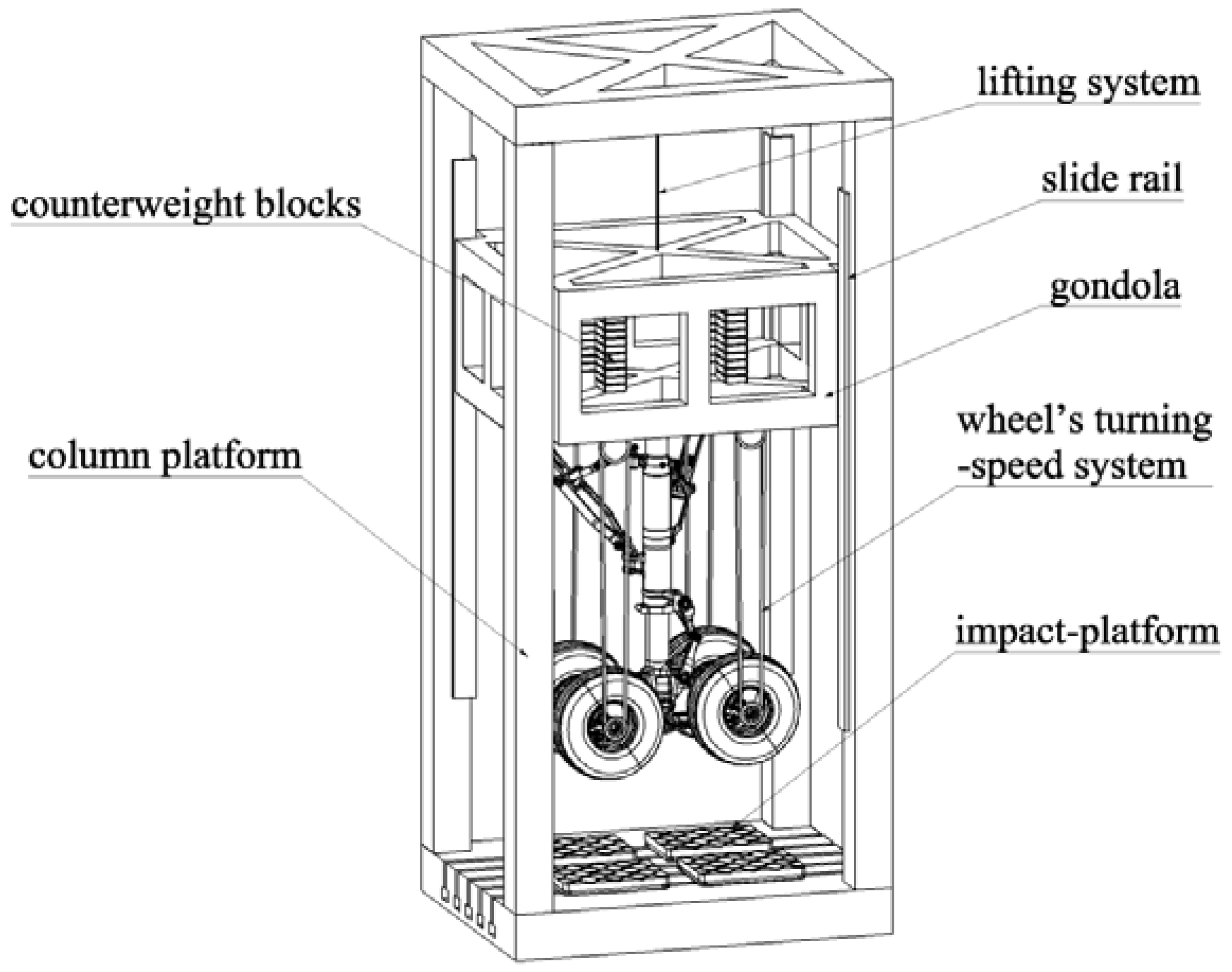
3.1. Drop Test Rig
3.2. Drop Test Working Principle
3.3. Drop Test Cases
- (a)
- Aircraft landing attitude: two types, level, and tail-down, according to the requirements of CCAR 25,479 and 25,481. The tail-down angle is 8° based on the aircraft design requirements.
- (b)
- Aircraft landing weight: two types, landing weight and take-off weight, whose sinking velocities are 3.05 m/s and 1.83 m/s, respectively, following CCAR 25,473.
- (c)
- Pitch damper filling parameters adjusting: due to the lack of development experience, a parameter adjusting test is added for the pitch damper by varying its initial pressure and main throttle diameter as shown in Table 1, which aims at the influence of these parameters on the load for the pitch damper and the overall landing performance for the landing gear. As the pitching rotation of the trolley during tail-down landing is much higher than that during level landing, all the adjusting tests are carried out in the condition of tail-down landing.
3.4. Formulation of Data Processing
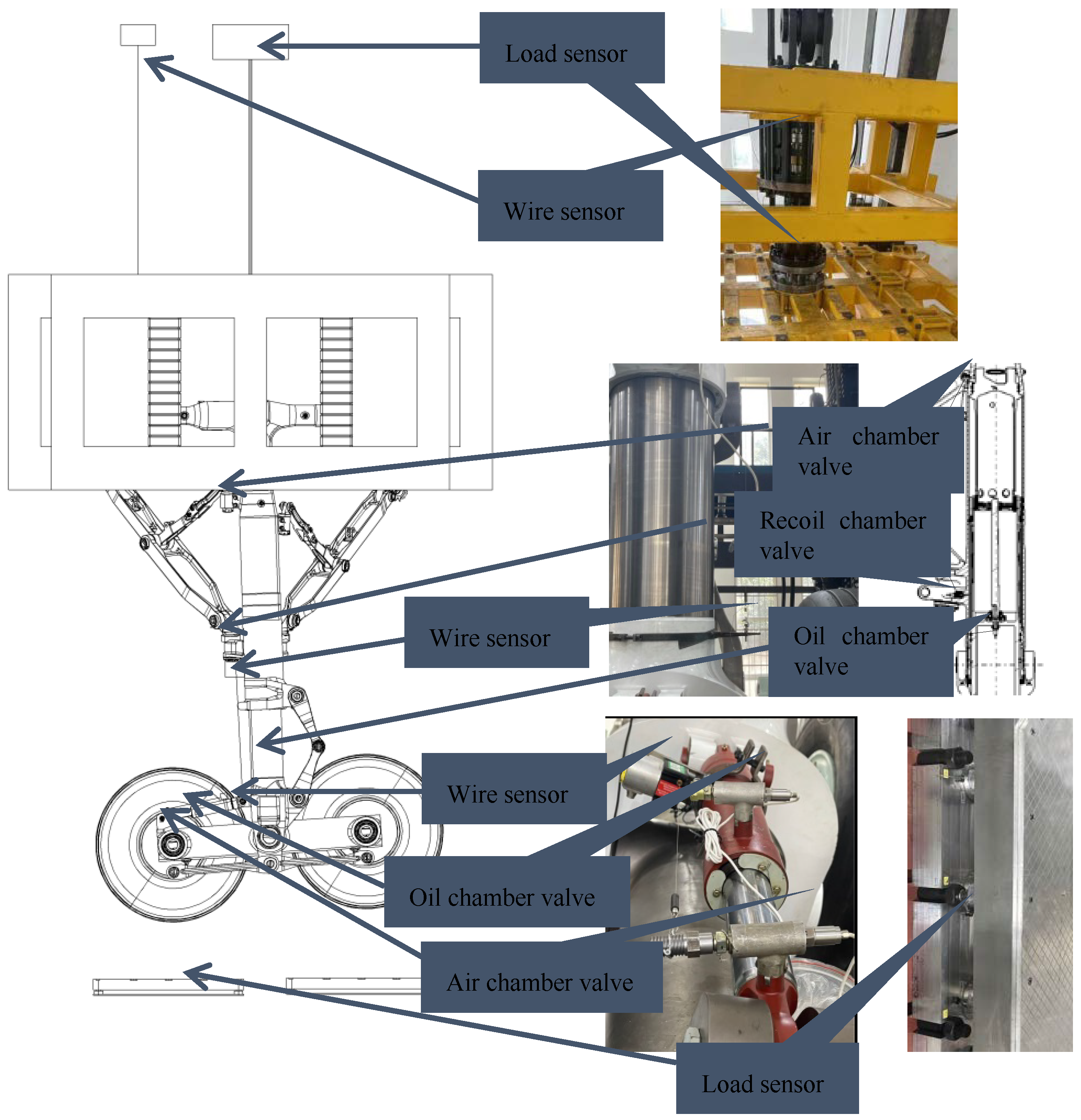
- The drop height : the vertical distance from the impact-platform to the lowest edge of all tires [28], which is determined by,where is the sinking velocity (specified by regulations, see Section 3.3(b)), and is gravitational acceleration. In the experiment, the reading of a wire sensor which measures the vertical displacement of the gondola is checked to ensure the calculated H for each specified V.
- The theoretical work quantity : the kinetic energy of the landing gear before the landing impact, that is,where is the sinking velocity, and is reduced mass.
- The vertical overload coefficient: the ratio of the maximum sum of the vertical load of all tires to the equivalent reduced weight (equivalent reduced mass by gravitational acceleration).
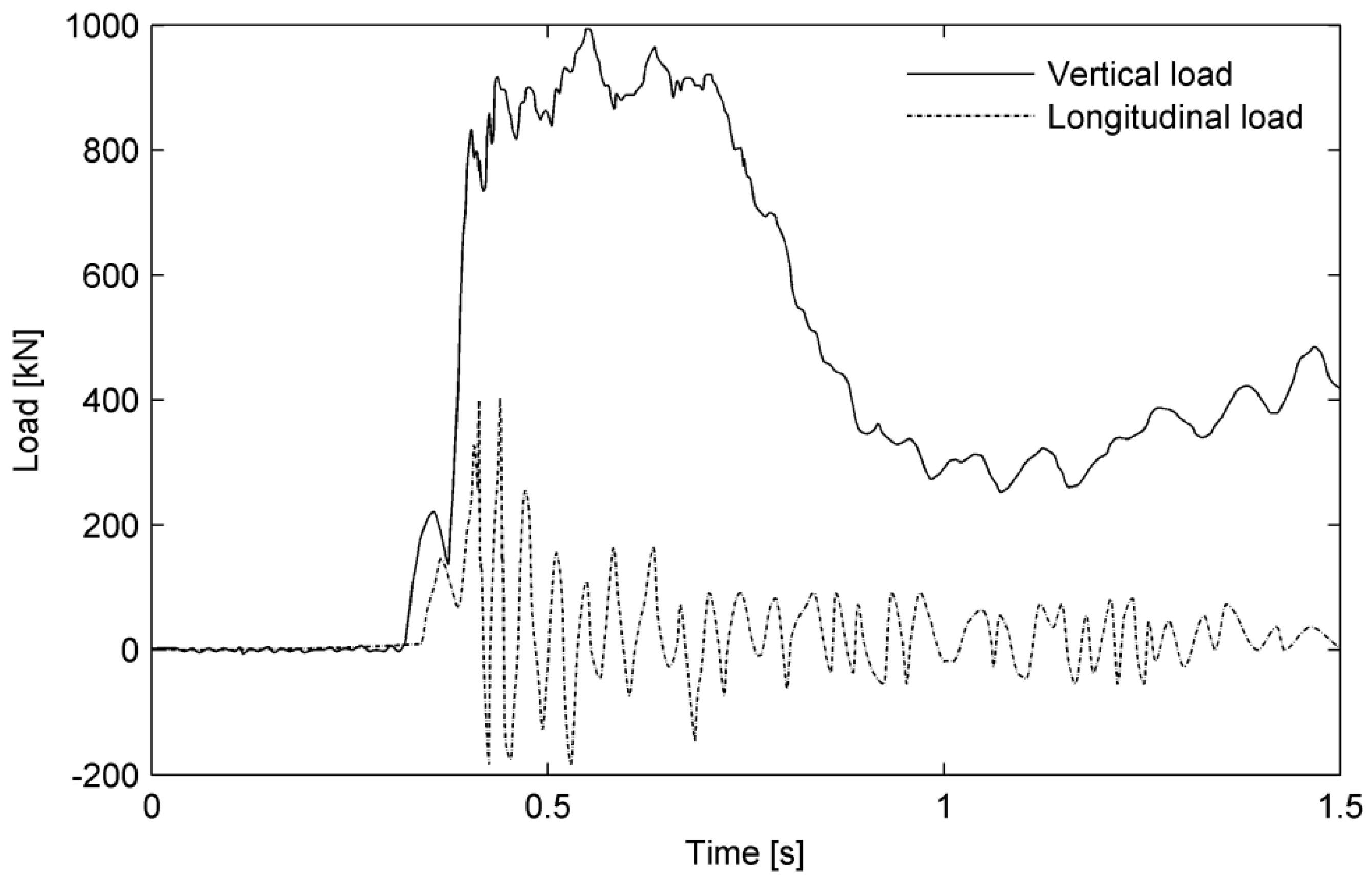
- The longitudinal overload coefficient: the ratio of the maximum sum of the longitudinal load of all tires to the reduced weight. In the test, the time history curves of vertical and longitudinal loads of all tires are measured by the sensors assembled in the impact-platforms.
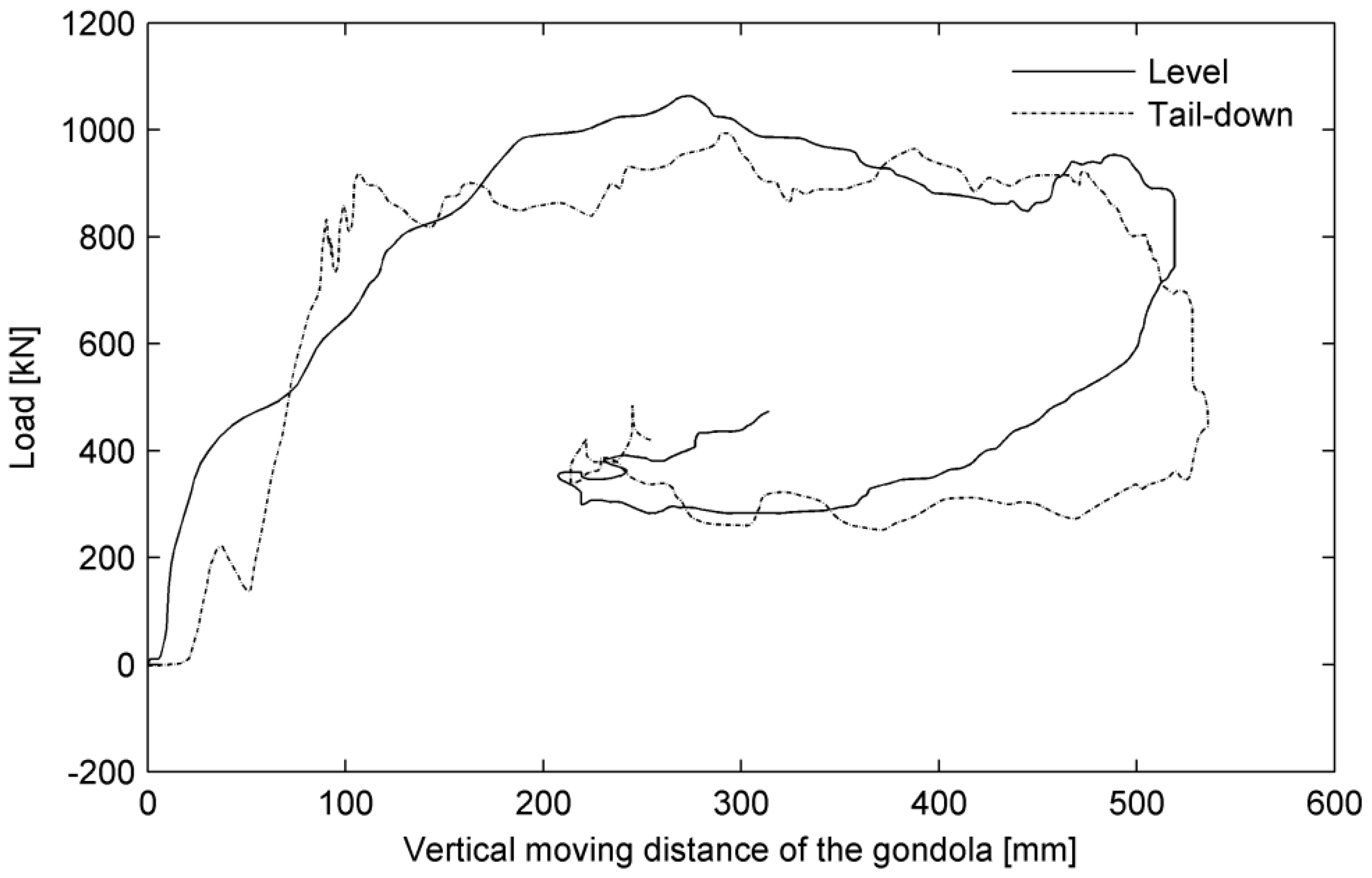
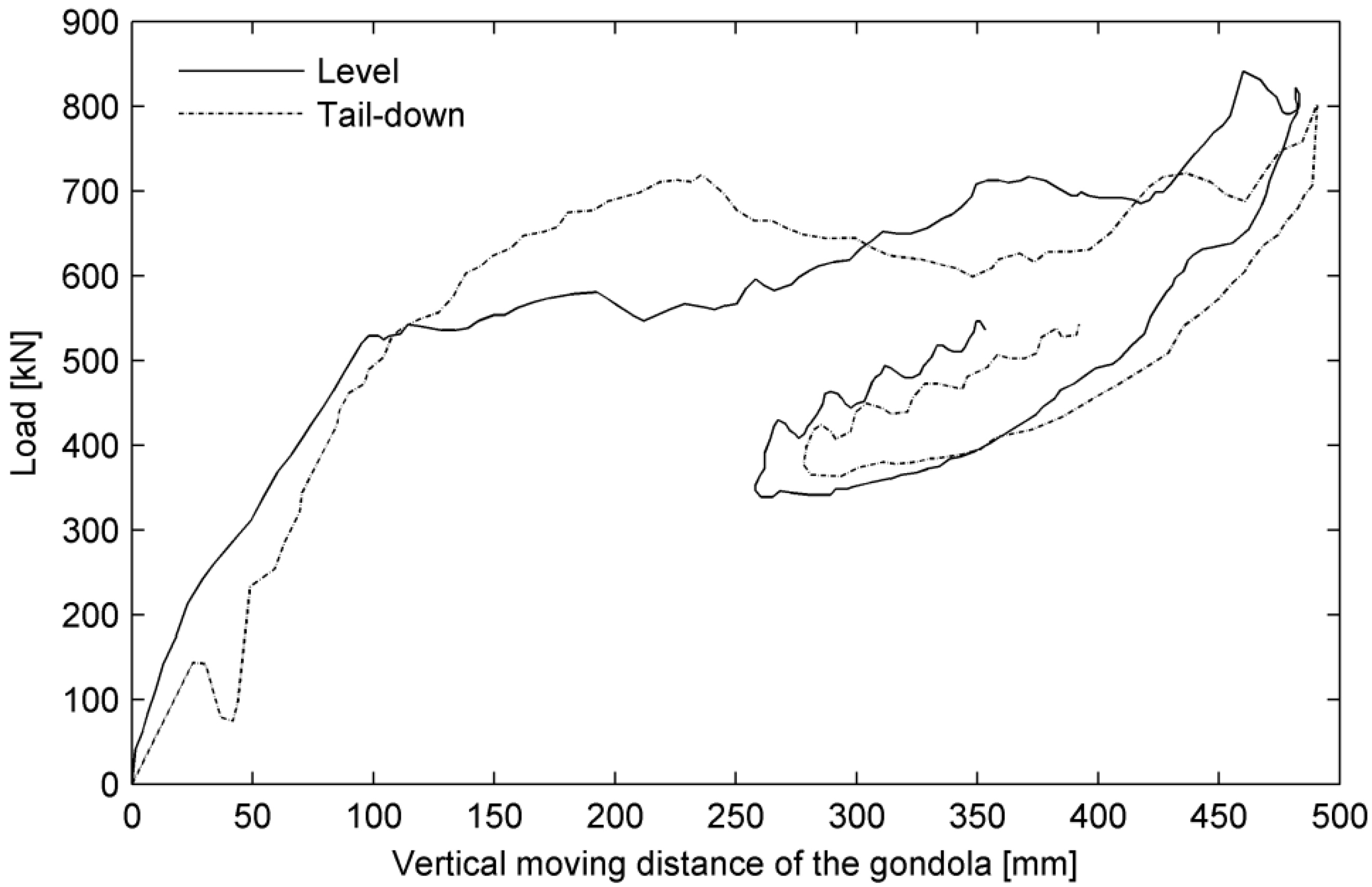
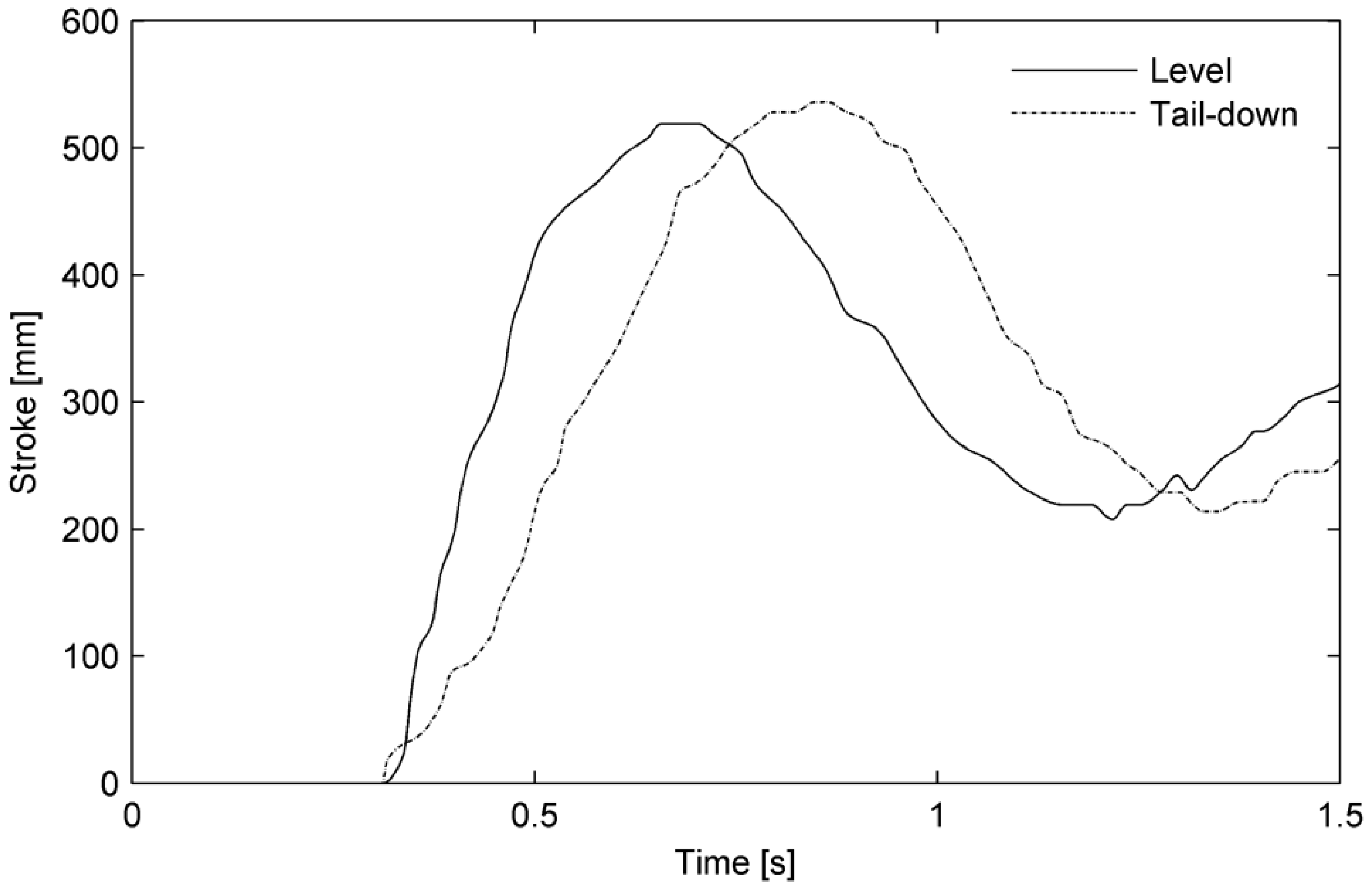
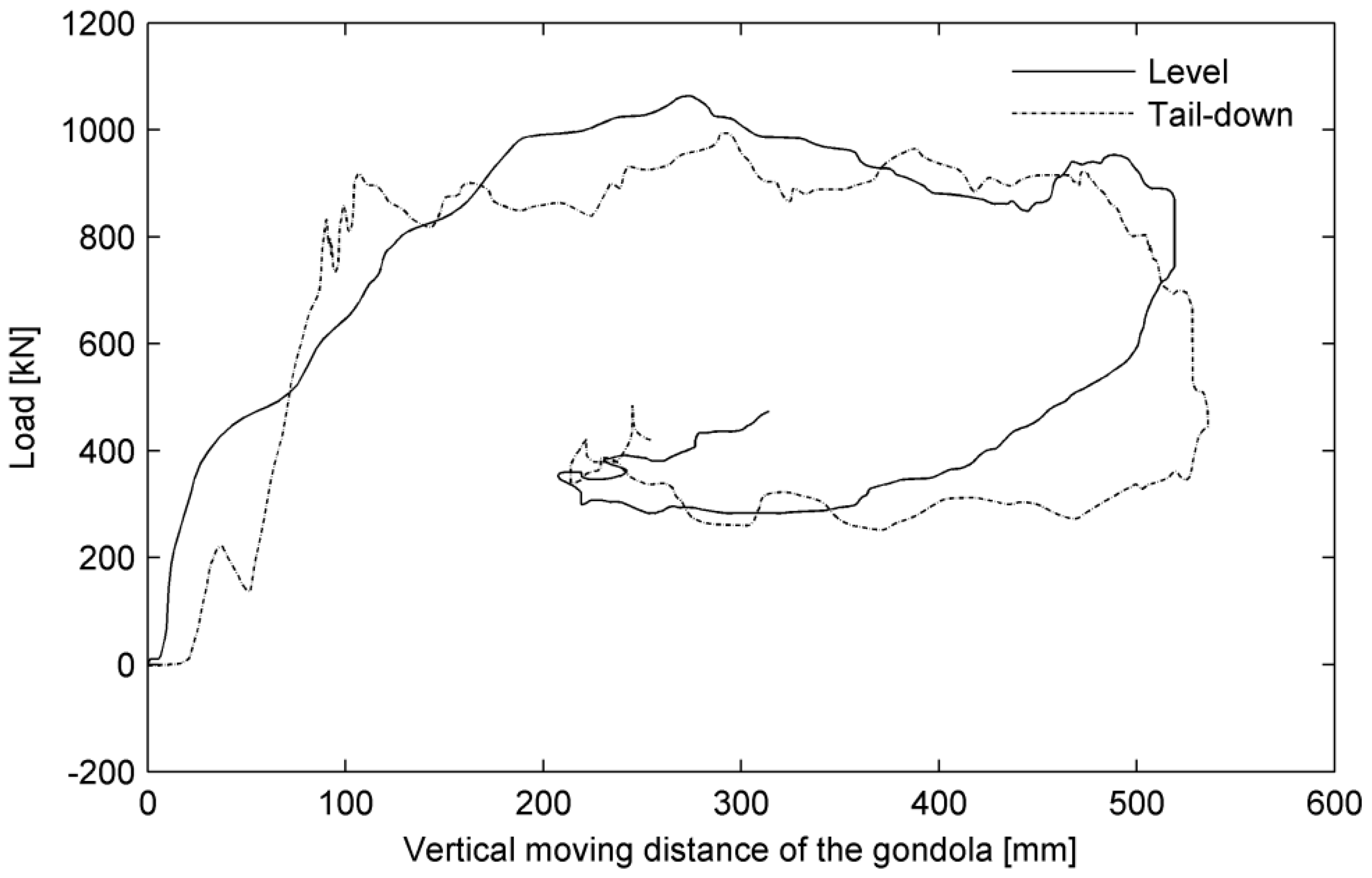
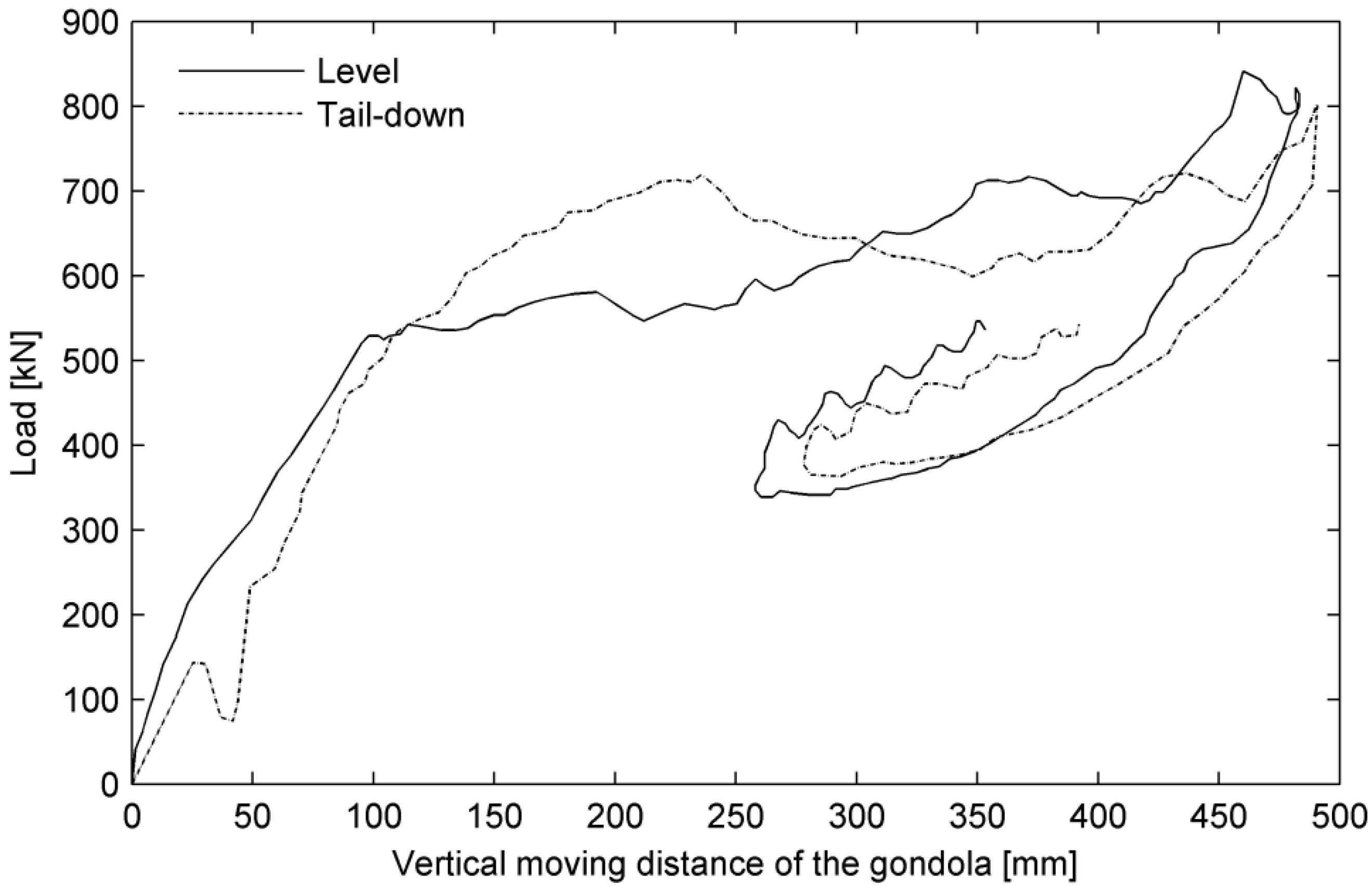
- The total work absorbed by the landing gear : the work done by the vertical reaction force of all tires from the moment that the tire touches the ground until the hanging basket reaches its lowest position, i.e.,where is the sum of the vertical reaction forces of all tires. is the vertical displacement of the gondola measured by the wire sensor (detailed in Figure 4, the tire first touching the ground as zero). is the maximum displacement. For the buffer, its axial force, , is obtained by multiplying the measured pressure (see Figure 4) with the acting area.
- The efficiency of the landing gear buffer system : the ability to absorb energy during the landing impact, which could be calculated by [29]where is the maximum sum of the vertical reaction force on the ground of all tires, and is the maximum displacement.
- The work absorbed by the pitch damper : the work done by the axial force from the damper begins to compress until its maximum compression, i.e.,where, is the axial force of the pitch damper. is the compression amount of the pitch damper, and is the maximum compression amount of the pitch damper.
- The maximum kinetic energy of the trolley pitching rotation could be calculated aswhere is the pitching moment of inertia of the trolley (composited of all mechanisms installed on the trolley such as axles, wheels and brakes, and tires. This value is obtained by measuring the 3D digital model in CATIA V19R5.). is the maximum angular velocity of the trolley in the first compression cycle, which is calculated from the compression speed of the pitch damper.
4. Results and Analysis
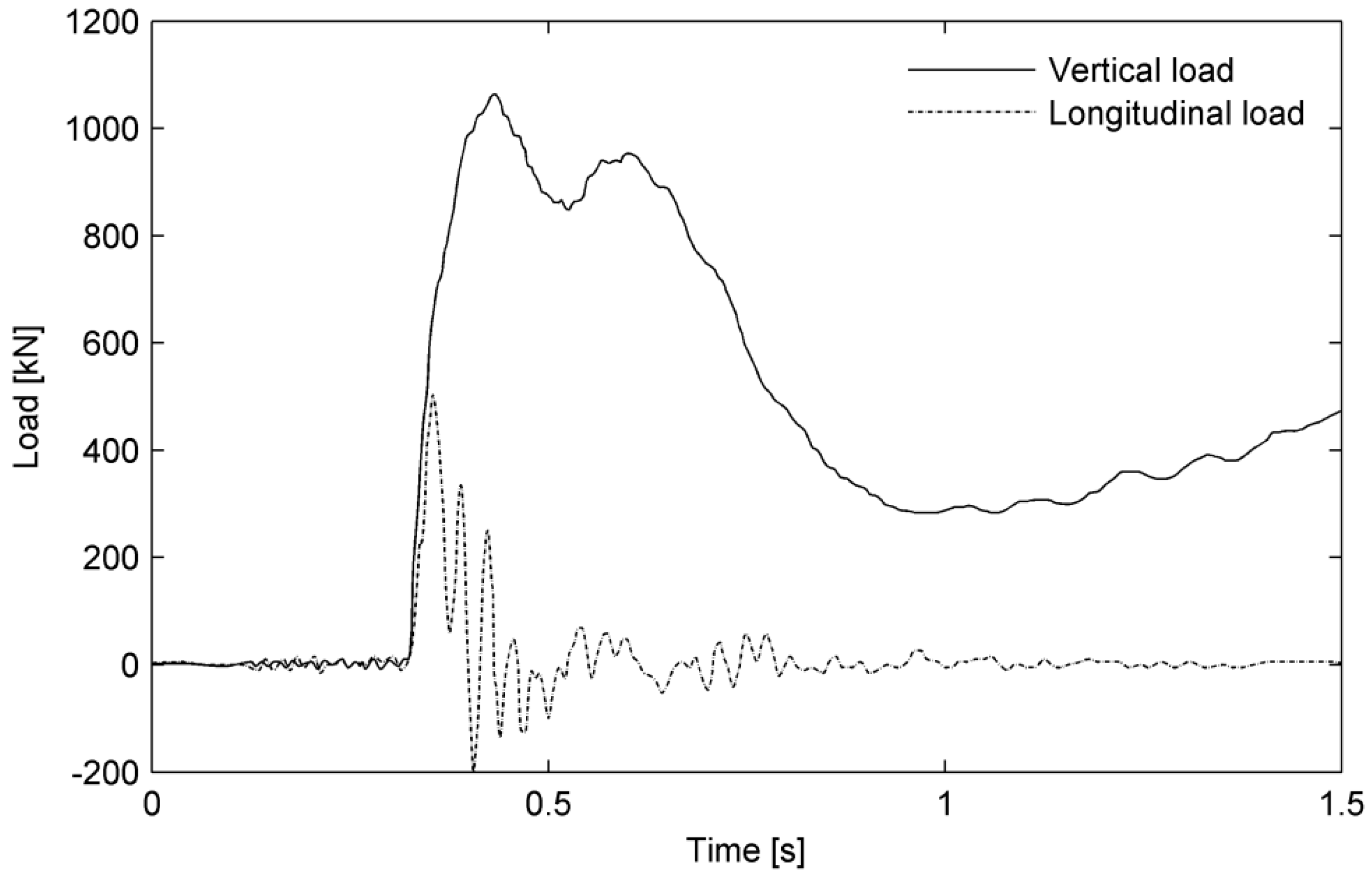
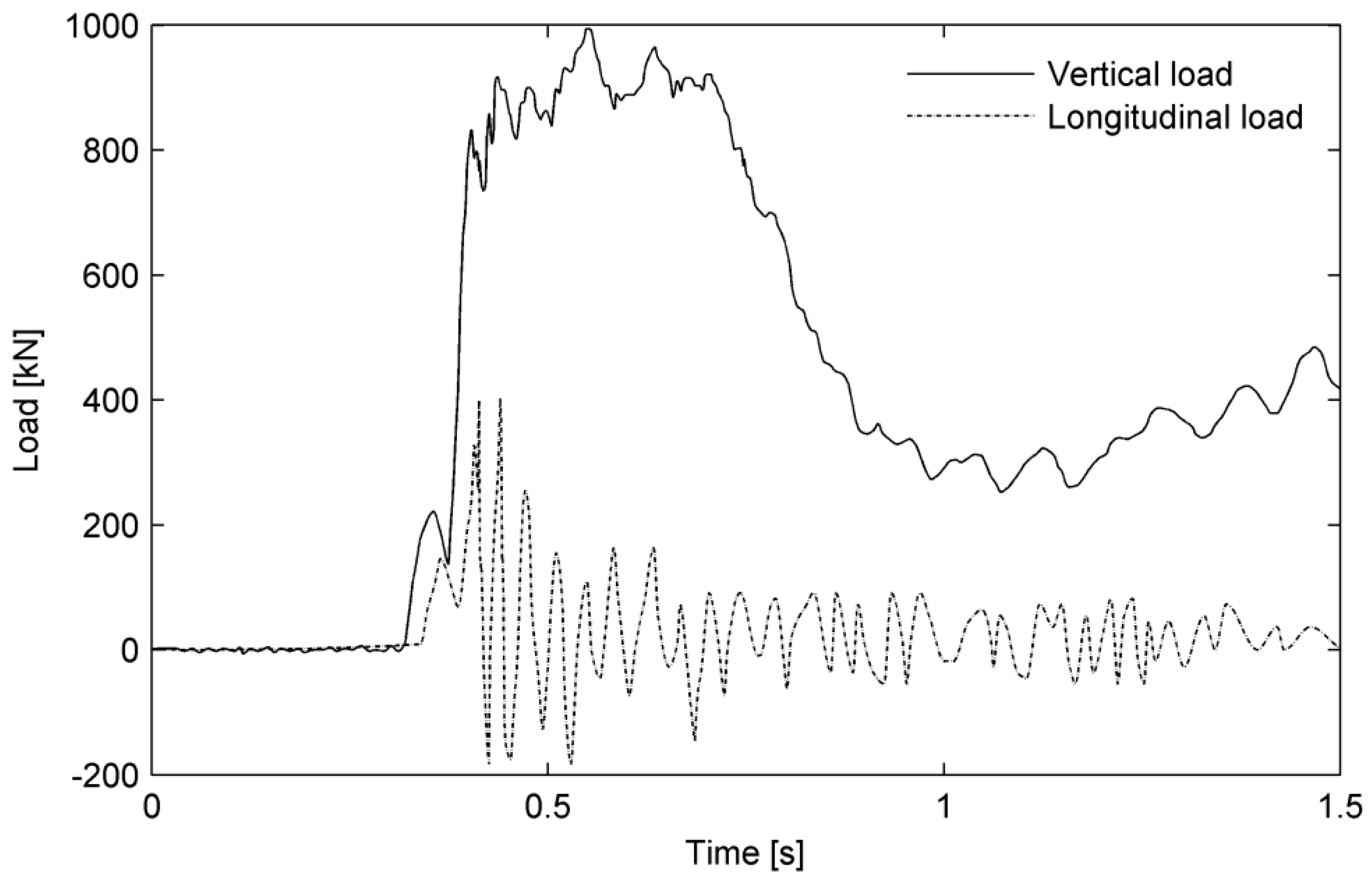
4.1. Landing Weight Test
4.2. Take-Off Weight Test
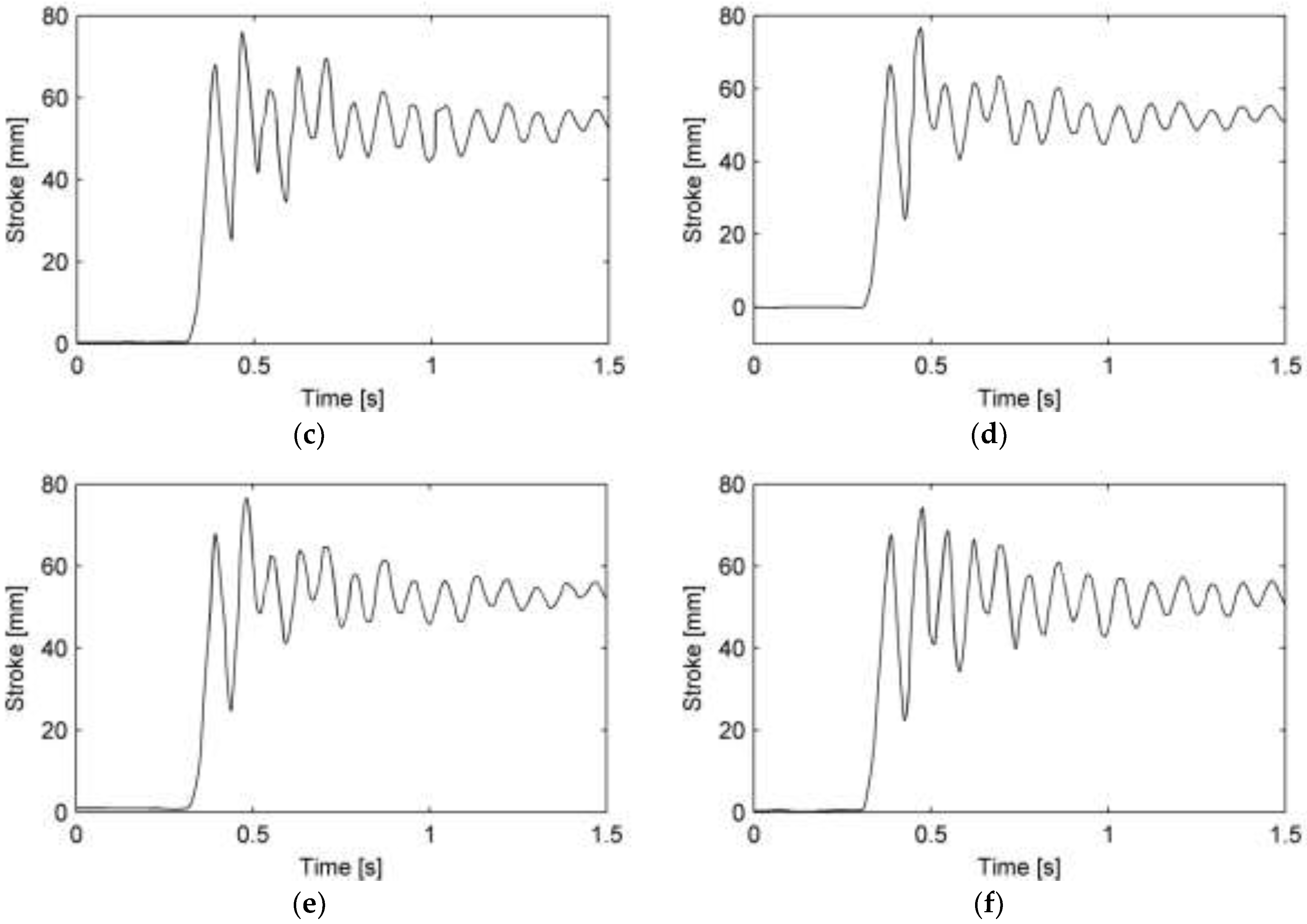
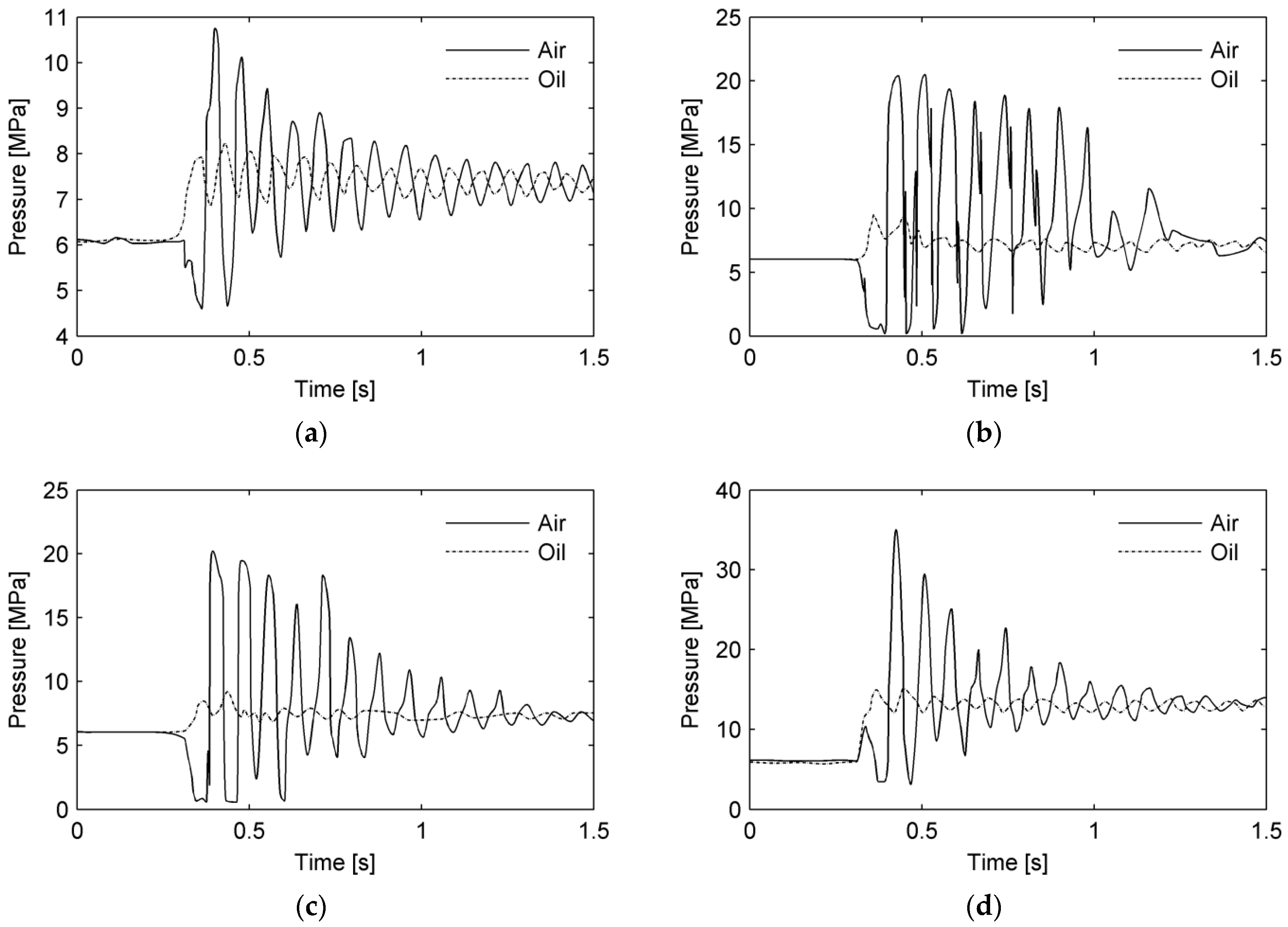
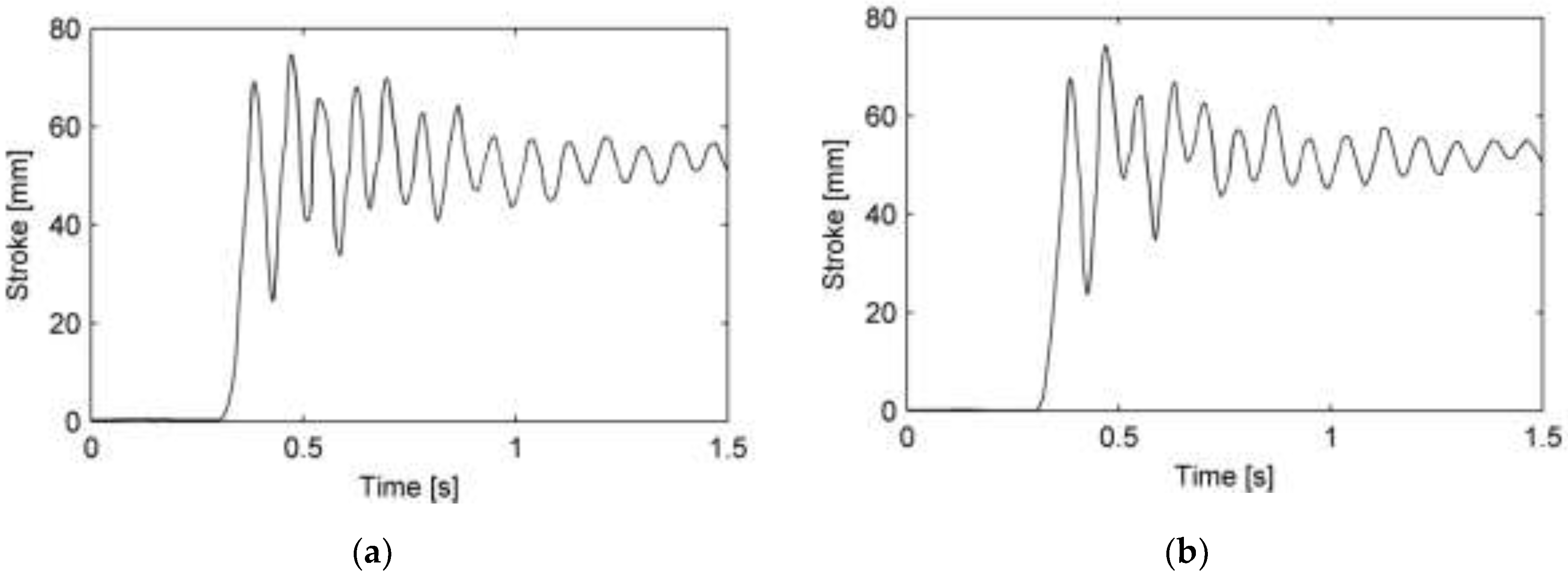
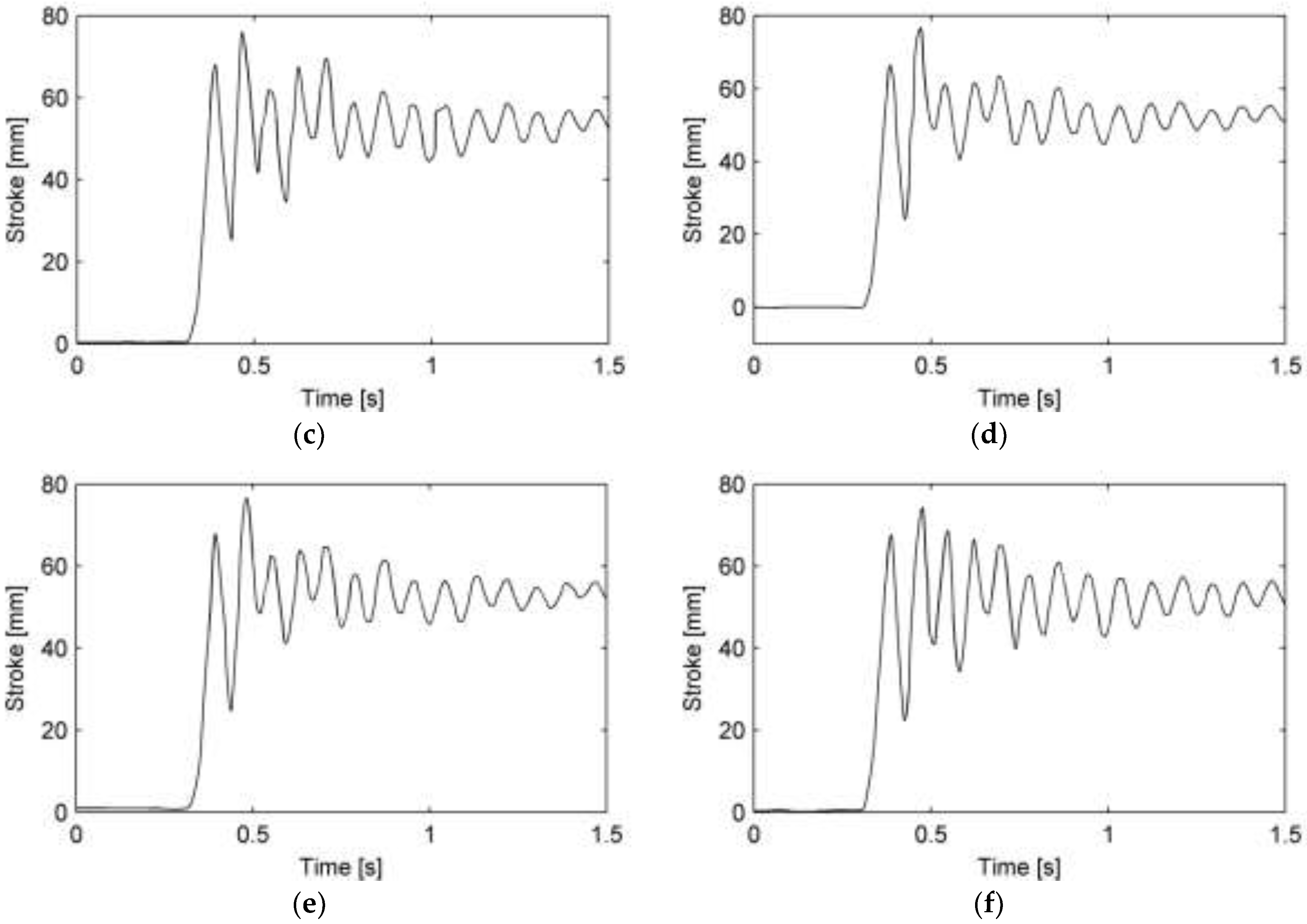
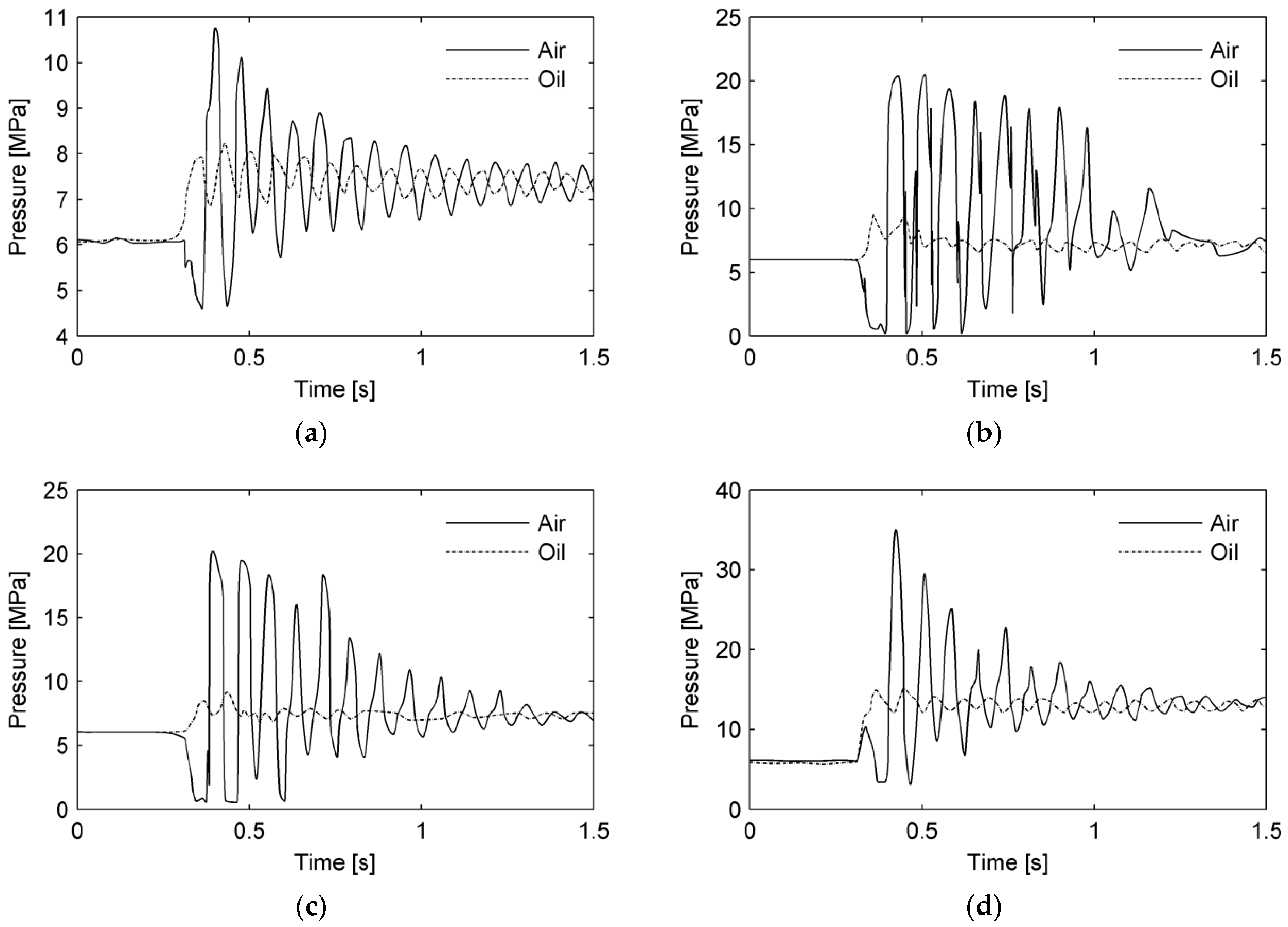
4.3. Parameter Adjusting Test of Pitch Damper
5. Conclusions
- Compared with the pillar landing gear, the vertical and longitudinal overload coefficient of the wheels–trolley landing gear is lower and the efficiency of the buffer system is higher during the landing process, which shows its good ability to absorb the impact power of landing.
- The overload coefficient decreases and the buffer system efficiency of the wheels–trolley landing gear increases during 8° tail-down landing, which shows its good anti-tail-down landing ability.
- The work absorbed by the pitch damper accounts for a small proportion of the total energy of the trolley pitching rotation during the landing process, and the pitch damper is not the chief consumer of the kinetic energy of the trolley during the landing process.
- In the condition of tail-down landing, the initial filling pressure of the pitch damper will not significantly affect the pitching oscillation law of the trolley, nor will it significantly affect the peak axial load. However, it will affect the attenuation rate of the pitching oscillation of the trolley. The appropriate initial inflation pressure can accelerate the attenuation of the oscillation. The increase of the main throttle of the pitch damper or even the absence of damping will not significantly affect the peak axial load; however, the too-small main throttle will lead to a significant increase in the peak pressure of the internal oil chamber and affect the structural safety.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pan, W.; Kuang, A.; Feng, Y. Study on the Wheel Load Distribution of a Four-wheel Aircraft Landing-Gear when Landing at Large Attack Angle. Mech. Sci. Technol. Aerosp. Eng. 2008, 27, 649–651. [Google Scholar]
- Herman, S.; Yang, D. C-5A main landing gear bogie pitching control. J. Aircr. 1971, 8, 912–917. [Google Scholar]
- Nie, H.; Wei, X. Key Technologies for Landing Gear of Large Civil Aircrafts. J. Nanjing Univ. Aeronaut. Astronaut. 2008, 40, 427–432. [Google Scholar]
- Pritchard, J. An Overview of Landing Gear Dynamics; NASA/TM-1999-209143; Langley Research Center: Hampton, VA, USA, 1999. [Google Scholar]
- Hanke, C.R. The Simulation of a Large Jet Transport Aircraft-Vol.1 Mathematical Model; NASA-CR-1756; NASA Center for Aerospace Information: Wichita, KS, USA, 1971. [Google Scholar]
- Hanke, C.R. The Simulation of a Large Jet Transport Aircraft-Vol.2 Modeling Data; US National Technical Information Service N73-10027; NASA Center for Aerospace Information: Wichita, KS, USA, 1970. [Google Scholar]
- Wahi, M.K. Oleopneumatic shock strut dynamic analysis and its real-time simulation. J. Aircr. 1976, 13, 303–308. [Google Scholar] [CrossRef]
- Berg, C.D.; Wellstead, P.E. The application of a smart landing gear oleo incorporating electrothelogical fluid. J. Intell. Mater. Syst. Struct. 1998, 9, 592–600. [Google Scholar] [CrossRef]
- Han, C.; Kim, B.; Choi, S. Design of a New Magnetorheological Damper Based on Passive Oleo-Pneumatic Landing Gear. J. Aircr. 2018, 55, 2510–2520. [Google Scholar] [CrossRef]
- Zhen, L. Conceptual Design of Landing Gear for Heavy Load Aircraft. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2009. [Google Scholar]
- Zhang, M. Research on Some Key Technologies of Aircraft Ground Dynamics. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2009. [Google Scholar]
- Xia, M. Design and Performance Analysis on Bogie Stabilization System of the Four-Wheel Landing Gear. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2020. [Google Scholar]
- Daughetee, C.C. Drop testing naval aircraft and the VSD landing gear dynamic test facility [A]. J. Aircr. 1974, 11, 758–764. [Google Scholar] [CrossRef]
- Shi, H.; Zhang, D. Influence of imitation condition of spin-up and spring back drag loads on drop test result. Acta Aeronaut. Et Astronaut. Sin. 2001, 22, 39–41. [Google Scholar]
- De Martin, A.; Jacazio, G.; Sorli, M. Simulation of Runway Irregularities in a Novel Test Rig for Fully Electrical Landing Gear Systems. Aerospace 2022, 9, 114. [Google Scholar] [CrossRef]
- Giannella, V.; Baglivo, G.; Giordano, R.; Sepe, R.; Citarella, R. Structural FEM Analyses of a Landing Gear Testing Machine. Metals 2022, 12, 937. [Google Scholar] [CrossRef]
- Wong, J.; Ryan, L.; Kim, I. Design optimization of aircraft landing gear assembly under dynamic loading. Struct. Multidisc. Optim. 2018, 57, 1357–1375. [Google Scholar] [CrossRef] [Green Version]
- Ding, Y.W.; Wei, X.H.; Nie, H.; Li, Y.P. Discharge coefficient calculation method of landing gear shock absorber and its influence on drop dynamics. J. Vibroeng. 2018, 20, 2550–2562. [Google Scholar]
- Han, C.; Kim, B.H.; Choi, S.B. Effects of magnetic core parameters on landing stability and efficiency of magnet or heological damper-based landing gear system. J. Intell. Mater. Syst. Struct. 2020, 31, 198–208. [Google Scholar] [CrossRef]
- Ahmad, M.A.; Shah, S.I.A.; Shams, T.A.; Javed, A.; Rizvi, S.T.U.I. Comprehensive design of an oleo-pneumatic nose landing gear strut. Proc. IMechE Part G J. Aerosp. Eng. 2021, 235, 1605–1622. [Google Scholar] [CrossRef]
- Cui, Y.; Cen, G.; Liang, L. Study on the characteristics dynamic load of new aircraft landing. Comput. Simul. 2020, 37, 15–21. [Google Scholar]
- Nie, W.; Lu, J.; Ma, Y.; Chen, X. Analysis on the characteristics of the damping hole of landing gear buffer. Mach. Tool Hydraul. 2021, 49, 151–155. [Google Scholar]
- Hou Ci Wan, X.; Zhao, M.; Zhang, D. Simulation Analysis Technique of Truck-like Landing Gear Based on ADAMS. J. Syst. Simul. 2007, 19, 909–913. [Google Scholar]
- Xu, W. Design and Analysis on Bogie Stabilization System of Multi-Wheel Landing Gear. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2018. [Google Scholar]
- Xue, C.; Han, Y.; Qi, W.; Dai, J. Landing-gear drop-test rig development and application for light airplane. J. Aircr. 2012, 49, 2064–2076. [Google Scholar] [CrossRef]
- Shi, H.W.; Yang, S.X.; Zhang, D.Q.; Fu, Y.H. Parameters Study at Touchdown Instant of the Nose Undercarriage of Fighter Airplane. Acta Aeronaut. Astronaut. Sin. 2003, 24, 517–520. [Google Scholar]
- Jia, Y.; Xia, T.; Song, R. Drop test and analysis of the landing gear of the tube spring. J. Vib. Shock 2017, 36, 218–223. [Google Scholar]
- Schmidt, R.K. Design of Aircraft Landing Gear; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Currey, N.S. Aircraft Landing Gear Design Principles and Practices; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1988. [Google Scholar]
- Tang, A. Analysis of usage landing gears loads spectrum for an aircraft’s landing gears. Struct. Environ. Eng. 2007, 34, 43–48. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Air Chamber Pressure under Unloaded Condition/MPa | Recoil Channel Diameter/mm |
|---|---|---|
| PD1 | 4 | 4.5 |
| PD2 | 6 | 4.5 |
| PD3 | 8 | 4.5 |
| PD4 | 6 | 3.5 |
| PD5 | 6 | 2.5 |
| PD6 | 6 | No damping |
| Case No. | Landing Attitude | Reduced Mass (kg) | Sinking Velocity (m/s) | Parameters of Pitch Damper |
|---|---|---|---|---|
| 1 | Level | 95,000 | 3.05 | PD4 |
| 2 | Tail-down | 95,000 | 3.05 | PD4 |
| 3 | Level | 120,000 | 1.83 | PD4 |
| 4 | Tail-down | 120,000 | 1.83 | PD4 |
| 5 | Tail-down | 95,000 | 3.05 | PD5 |
| 6 | Tail-down | 95,000 | 3.05 | PD2 |
| 7 | Tail-down | 95,000 | 3.05 | PD1 |
| 8 | Tail-down | 95,000 | 3.05 | PD3 |
| 9 | Tail-down | 95,000 | 3.05 | PD6 |
| Parameters | Case 1 | Case 2 |
|---|---|---|
| Release height/mm | 475 | 475 |
| Release mass/kg | 45,673 | 45,673 |
| Tire speed (km/h) | 185.4 | 185.4 |
| Theoretical work/kJ | 441.9 | 441.9 |
| Measured work/kJ | 446.3 | 443.8 |
| Work error/% | 0.996 | 0.430 |
| The maximum vertical moving distance of the gondola/mm | 519 | 536 |
| The efficiency of the buffer system/% | 80.9 | 83.3 |
| The maximum sum of the vertical reaction force of all tires/kN | 1063 | 994 |
| The maximum sum of the longitudinal reaction force of all tires/kN | 504 | 438 |
| The minimum sum of the longitudinal reaction force of all tires/kN | −200 | −183 |
| Vertical overload coefficient | 1.14 | 1.07 |
| Maximum longitudinal overload coefficient | 0.54 | 0.47 |
| Minimum longitudinal overload coefficient | −0.21 | −0.20 |
| Parameters | Case 1 | Case 2 |
|---|---|---|
| Release height/mm | 171 | 171 |
| Release mass/kg | 45,673 | 45,673 |
| Tire speed (km/h) | 185.4 | 185.4 |
| Theoretical work/kJ | 267.9 | 267.9 |
| Measured work/kJ | 274.1 | 275.0 |
| Work error/% | 2.3 | 2.7 |
| The maximum vertical moving distance of the gondola/mm | 483 | 491 |
| The efficiency of the buffer system/% | 67.5 | 69.7 |
| The maximum sum of the vertical reaction force of all tires/kN | 841 | 803 |
| The maximum sum of the longitudinal reaction force of all tires/kN | 388 | 282 |
| The minimum sum of the longitudinal reaction force of all tires/kN | −335 | −242 |
| Vertical overload coefficient | 0.71 | 0.68 |
| Maximum longitudinal overload coefficient | 0.42 | 0.24 |
| Minimum longitudinal overload coefficient | −0.28 | −0.21 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, W.; Zhu, L.; Wang, Y. Landing Performance Study for Four Wheels Twin Tandem Landing Gear Based on Drop Test. Aerospace 2022, 9, 334. https://doi.org/10.3390/aerospace9070334
Fang W, Zhu L, Wang Y. Landing Performance Study for Four Wheels Twin Tandem Landing Gear Based on Drop Test. Aerospace. 2022; 9(7):334. https://doi.org/10.3390/aerospace9070334
Chicago/Turabian StyleFang, Wei, Lingang Zhu, and Youshan Wang. 2022. "Landing Performance Study for Four Wheels Twin Tandem Landing Gear Based on Drop Test" Aerospace 9, no. 7: 334. https://doi.org/10.3390/aerospace9070334
APA StyleFang, W., Zhu, L., & Wang, Y. (2022). Landing Performance Study for Four Wheels Twin Tandem Landing Gear Based on Drop Test. Aerospace, 9(7), 334. https://doi.org/10.3390/aerospace9070334