1. Introduction
At present, countries around the world are actively exploring space. Therefore, the invention of safe and reliable transportation system that can realize the round-trip between space and land has become a primary task. It is also an important premise for human beings to make large-scale use of space [
1,
2,
3]. In recent years, the research of aerospace vehicles has gradually become popular. An aerospace vehicle is a kind of reusable aircraft with horizontal take-off and landing. It can fly in the two spaces of aviation and aerospace, so it can reduce the cost of round-trip transportation between space and earth significantly, which has high application value. As countries around the world regard aerospace as a new generation of strategic development field, the research of aerospace vehicles will also be paid attention to by countries all over the world.
Different from traditional aircrafts, aerospace vehicles break through the limitations of traditional aircrafts. They have the characteristics of multiple mission, multiple working modes, and high-speed maneuvering. At the same time, they also have the advantages of reuse and rapid launch [
4]. At present, the representative achievements in the field of aerospace vehicle research include the United States’ X-37B, Russia’s “multi-purpose aerospace system”, Germany’s “Sanger”, Britain’s “Skylon”, and so on [
5]. Among them, except that the US X-37B has completed the scheduled mission and returned successfully, most of the other research are still in the stage of research and development. The main bottleneck restricting the development of this technology is the complex motion characteristics of aerospace vehicles. In the whole flight process from take-off to landing, aerospace vehicles must go through five main stages: take-off, orbit entry, in orbit, flexible orbit change, and high-speed re-entry [
6]. Complex motion characteristics bring a great challenge to the existing navigation, guidance, and control technology. As an important part of GNC technology, navigation technology directly affects the accuracy of guidance and control loop. Therefore, advanced navigation technology has become one of the key technologies that need to be broken through urgently, and it is also a prerequisite for the safe execution of missions with aerospace vehicles.
To realize the cross-space flight of aerospace vehicle and measure its navigation parameters in each flight stage accurately, it is necessary to use multiple types of navigation sensors [
7]. Therefore, build a high-precision, highly reliable, and resilient multi-source fusion navigation system architecture is the primary way to solve the problem. Public information shows that the aerospace vehicle navigation system adopts multi-source redundancy configuration scheme to meet its system fault tolerance requirements. Therefore, based on inertial navigation system, according to the environmental characteristics of different flight stages, different types of auxiliary navigation sensors [
8] are used to improve the reliability of the navigation system has become the consensus of researchers, such as satellite navigation system [
9], celestial navigation system [
10], atmospheric altitude measurement system, synthetic aperture radar, and so on [
11]. The key of aerospace vehicle navigation system to meet its high-precision and reliable measurement requirements lies in: How to fuse multi-source navigational information that has significant spatiotemporal heterogeneity. Different navigation sensors in aeronautical and astronautics flight environment have significant differences in the measurement principles and mathematical modelling methods, and the output navigation parameters are also in different coordinate systems. It reflects the heterogeneity in spatial measurements. At the same time, different navigation sensors also have heterogeneous characteristics in time. Their sampling interval varies with different flight phases and environments. In addition, the harsh flight environment such as high speed and high dynamics of aerospace vehicle also brings challenges to the reliable measurement of navigation sensors. Compared with traditional aircraft, the flight environment faced by aerospace vehicles is more complex and harsher. The conventional single combination mode is difficult to correct the navigation system error reliably and difficult to obtain high-precision navigation information.
Therefore, in the multi-modal flight process of aerospace vehicles, advanced and effective information processing algorithms need to build a resilient multi-source navigation sensor fusion architecture and fuse heterogeneous navigation information to meet the needs of autonomous and reliable navigation. “Resilient” is a frequent concept in the field of PNT in the United States in recent years. Different departments in the United States regard “Resilient” as an important PNT capability from different aspects. This capability is juxtaposed with the capability characteristics of precision, rapid development, reliability, complementarity, and robustness. Academician Yang Yuanxi of China believes that resilient frame must have redundant information at first, otherwise, there can be no “resilient” choice [
12]. The basic starting point of resilient PNT is that any single PNT information source may have risks. Therefore, the utilization of “redundant” PNT information sources by other means is very important. It can be seen that integrating the resilient design idea into the architecture design of aerospace vehicle navigation system can well meet the characteristics of redundant configuration of its navigation sensors.
In terms of existing navigation system integration architecture design, Gao has proposed the two-level structure for the fusion of local state estimates and then to obtain the global optimal state estimation [
13]. Mostafa has proposed that the adaptive data sharing factor combined filter (DSFCF) is used as integrated navigation method [
14]. At present, the design of fusion architecture is mainly considered from one of the aspects of accuracy or reliability, which leads to the fact that the fusion architecture does not have resilient ability and is difficult to adapt to the complex flight environment of aerospace vehicles. In recent years, Virginia Tech designed the Virginia Tech Formation Flying Testbed (VTFFTB), a GPS-based hardware-in-the-loop (HIL) simulation testbed for dual-satellite formation flying [
15]. The platform provides a new idea for the verification of redundant architecture. In addition, different navigation sensors have different statistical characteristics of noise, which makes it difficult for the existing fusion methods to realize the high-precision fusion of multiple types of navigation sensors information. At the same time, sensors that output the same type of navigation parameters, such as GPS and SAR, they can all output position information, but the accuracy of their output navigation parameters are also different due to the different working principles. Therefore, the existing federated filter composed of fixed coefficients cannot meet the accuracy requirements of aerospace vehicle navigation system. In addition to the architecture design, many researchers have also recently studied the algorithm of multi-source fusion navigation. Zhou has proposed a new algorithm, the so-called constrained adaptive robust integration Kalman filter (CARIKF) is presented, which implements adaptive integration upon the robust direct fusion solution [
16]. Wang has proposed the algorithms of the navigation data fusion and the obstacle avoidance [
17]. As can be seen from the above analysis, according to different practical application scenarios, selecting different navigation sensors to build a multi-source fusion navigation system is becoming an important way to improve the reliability and accuracy of the system. However, the current fusion algorithms generally take the single configuration of navigation sensors as the research object. When the carrier is configured with redundant navigation sensors, the above algorithms need to build multiple navigation subsystems and filters, resulting in complex system calculation and low efficiency.
The flight range of aerospace vehicle is wide and the diverse flight environment will cause complex motion characteristics undoubtedly. At the same time, the bad flight environment such as “Black-out” area during flight may lead to the failure of the navigation sensor of the aerospace vehicle. Therefore, the design of aerospace vehicle multi-source fusion navigation system must also meet the requirements of fault tolerance. This is also an important performance that the navigation system has the ability of resilient integration. In this field, many scholars have also carried out corresponding research. Xu has proposed a method called Isolation and Repair Plan Failures (IRPF) for a spaceship with durable, concurrent, and resource-dependent actions [
18]. Xu has proposed that extracts the features with various scales, which contain both the local and the general information of the signal sequence, for making a comprehensive and precise classification and realize fault detection [
19]. Li has designed a fault detection architecture applied to INS/ADS with a time-offset, which solves the problem of the high PFA of INS/ADS fault detection under a time-offset [
20]. Lyu has proposed that use the knowledge of the thrust model to generate an analytical redundancy-based fault diagnosis approach for altitude estimation [
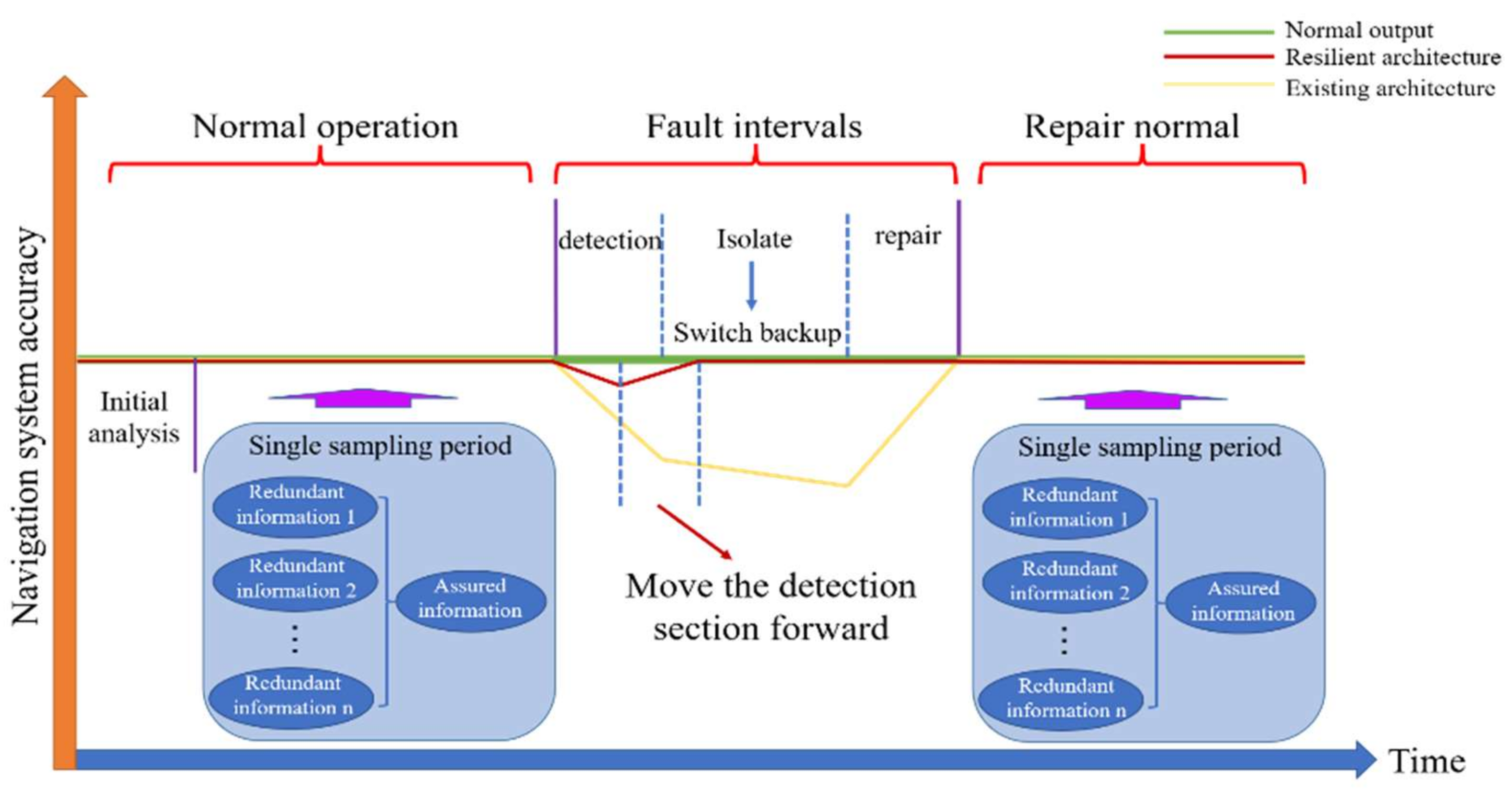
21]. From the above research, the fault-tolerant design is an important way to improve the reliability of the navigation system. However, the current fault-tolerant algorithm of navigation system mainly depends on the navigation subsystem composed of inertial navigation and other navigation sensors, and constructs the fault detection equation on this basis, which will lead to the efficiency reduction in the whole multi-source fusion navigation system. At the same time, the above algorithm usually has time delay when detecting the soft fault of navigation sensor, resulting in the fault polluting the main fusion system, and further polluting other healthy navigation subsystems through the feedback of the main fusion system to reduce the reliability of the whole system. Different from the general aircraft, the navigation sensor configuration of aerospace vehicle is not only multi-source, but also redundant on the same kind of navigation sensor. Therefore, how to make full use of the redundant navigation sensors information is very important. This paper combines of sensor fault-tolerant design and navigation subsystem fault-tolerant design to make the fault detection interval move forward and improve the reliability and robustness of multi-source redundant navigation system.
Aiming at the problems of complex flight environment and changeable motion characteristics of aerospace vehicle, which lead to the decline of accuracy, low fault tolerance and poor robustness of existing multi-source fusion navigation algorithms. This paper has proposed a resilient multi-source integrated navigation method for aerospace vehicles based on on-line evaluation of redundant information. The main innovations of this paper are as follows:
- (a)
We have designed a multi-level evaluation method of redundant information and use the information disorder analysis theory to carry out the quantitative analysis of redundant information of navigation sensor. The online adaptive weight allocation of the same type of redundant navigation sensors is realized, which solves the problem of filter instability caused by switching backup navigation sensors when the primary sensor fails, the navigation system realizes the “non-stop” work at the sensor level and improves the reliability.
- (b)
Secondly, the output effectiveness evaluation system of navigation subsystem has been established. According to the working principle, working characteristics and other factors of different types of navigation sensors, qualitative analysis of subsystem layer has been carried out, which solve the problem that different types of navigation sensors are difficult to unify the evaluation criteria for information fusion due to different accuracy.
- (c)
Finally, through the mutual correction of multi-level information evaluation results, the error decoupling between the output parameters of heterogeneous navigation sensors is realized to improve the robustness of the system.
Based on the existing multi-source fusion navigation system design ideas, the fusion architecture and algorithm has been proposed in this paper is combined with the characteristics of multi-source redundant navigation sensor configuration of aerospace vehicle and improve the fusion architecture with resilient ability. On this basis, a quantitative evaluation framework is designed for the output of the same type of navigation sensors in the sensor layer. According to use the redundant sensor information and the theory of information disorder analysis, different weights are given to the same type of navigation sensor outputs and the navigation parameters output of this type of sensors is weighted calculation. At the subsystem layer, the navigation subsystem is constructed by using the navigation parameters output from the sensor layer. The hierarchical analysis is carried out for the working characteristics of heterogeneous navigation sensors and the initial weights of heterogeneous navigation sensors that output the same type of navigation parameters are given. At the same time, combined with quantitative analysis, the quantitative analysis weights and qualitative analysis weights are fused to realize the adaptive adjustment of the fusion weights of each sub filter in the main fusion layer. Finally, the design of resilient multi-source redundant navigation system is completed. This paper designs the fusion algorithm from the dimensions of navigation system accuracy, reliability and fault tolerance. The method can meet the requirements of high precision and high reliability of aerospace vehicle navigation system, and is of great significance to the further engineering of aerospace vehicle research.
2. Multi Source Navigation Information Resilient Fusion Architecture
Measuring resilient is a key component of designing resilient architecture. Quantitative evaluation theory is needed to evaluate the effectiveness of various resilient architecture designs and compare them with each other [
22]. In the multi-source navigation system of aerospace vehicles, due to the difference of the applicable objects of the resilient architecture, quantitative evaluation cannot meet the needs of reliable measurement of heterogeneous information. Therefore, it is also necessary to carry out qualitative evaluation of the resilient architecture design according to the working characteristics of heterogeneous navigation sensors, to meet the reliable output of aerospace vehicle navigation system in complex flight environment.
As shown in
Figure 1, the system architecture is an open architecture, so, the redundant and diversified navigation information sources must be ensured in the architecture to further improve the robustness of the system.
2.1. Resilient Fusion Architecture Design
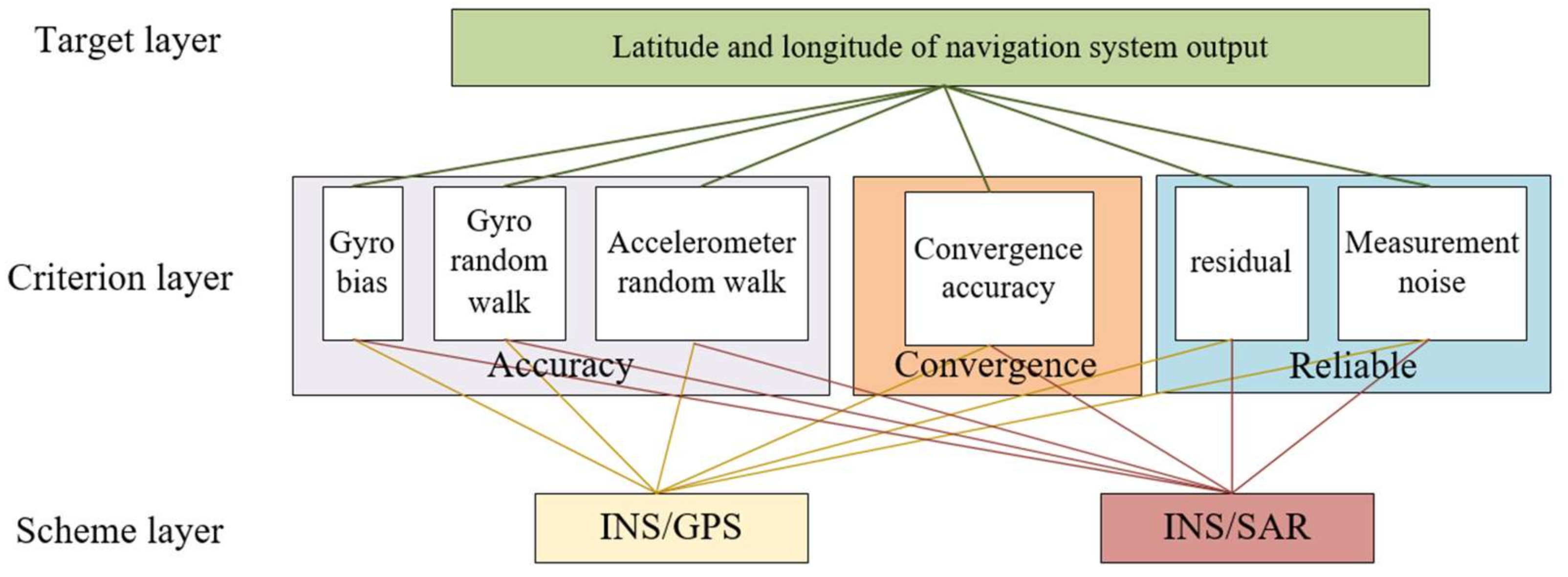
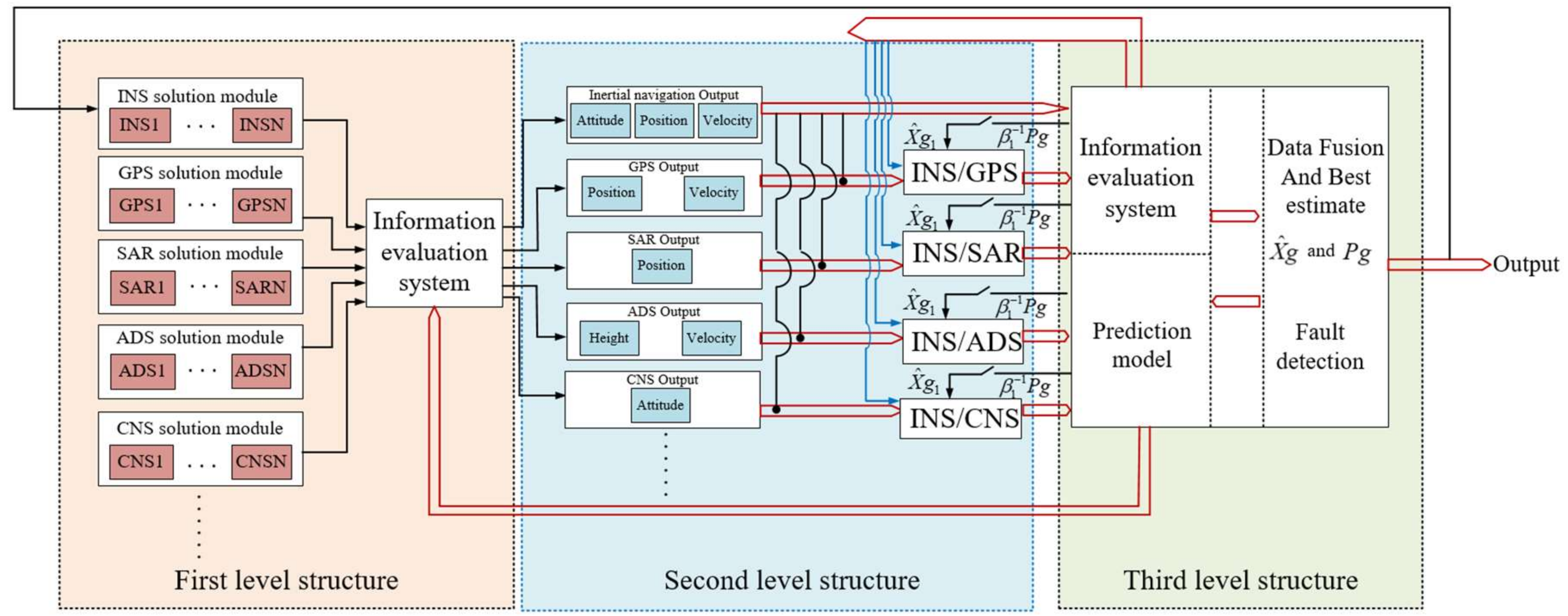
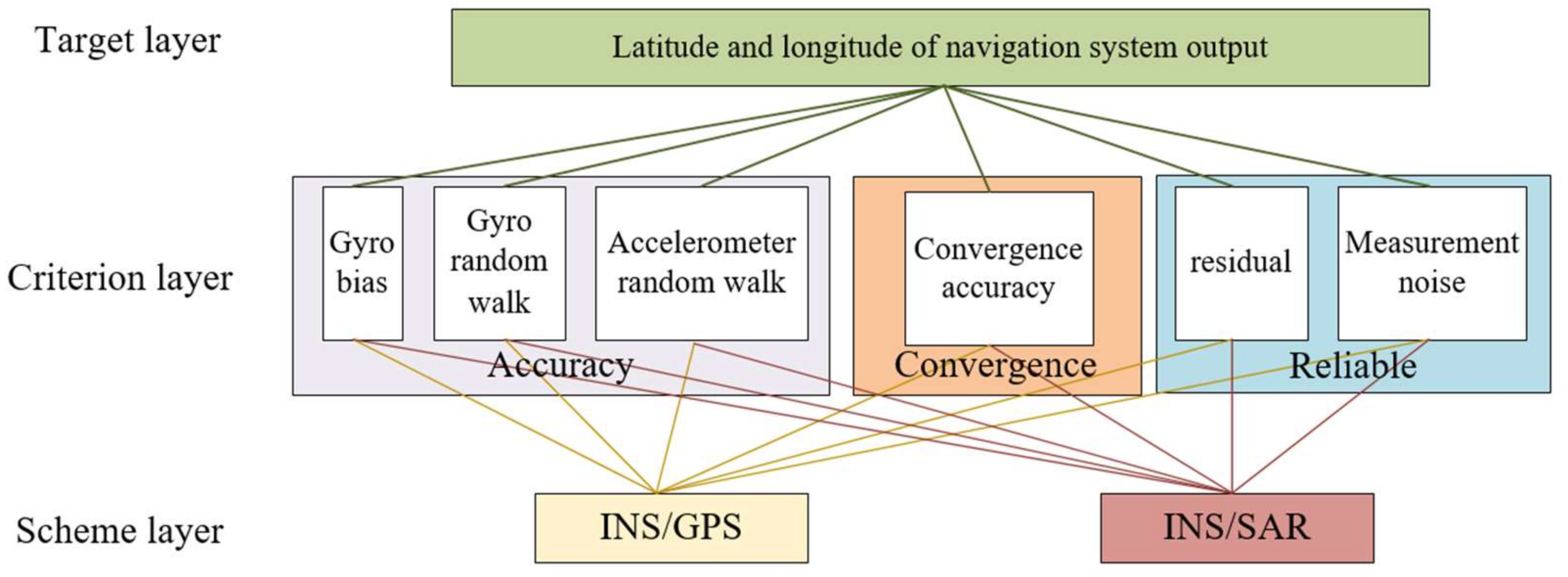
Due to the differences in the measurement principle and application scope of different navigation sensors, and considering the complex flight characteristics of aerospace vehicles, it is very easy to bring navigation sensor faults. Therefore, the architecture design of multi-source navigation system for aerospace vehicle must fully consider the output characteristics of various navigation sensors in different flight stages, deeply mine the information characteristics of navigation parameters. According to integrate the idea of resilient design and carry out quantitative evaluation to enable the navigation system have resilient self-repair capability in case of some sensor failures and realize the optimal output of navigation parameters. On this basis, the performance of different navigation sensors is qualitatively evaluated, at the same time, we have established the effectiveness evaluation system of navigation subsystem. Finally, a high-precision and reliable fusion architecture has been built. The architecture design diagram of resilient multi-source integrated navigation system for aerospace vehicle based on on-line evaluation of redundant information designed in this paper is shown in
Figure 2.
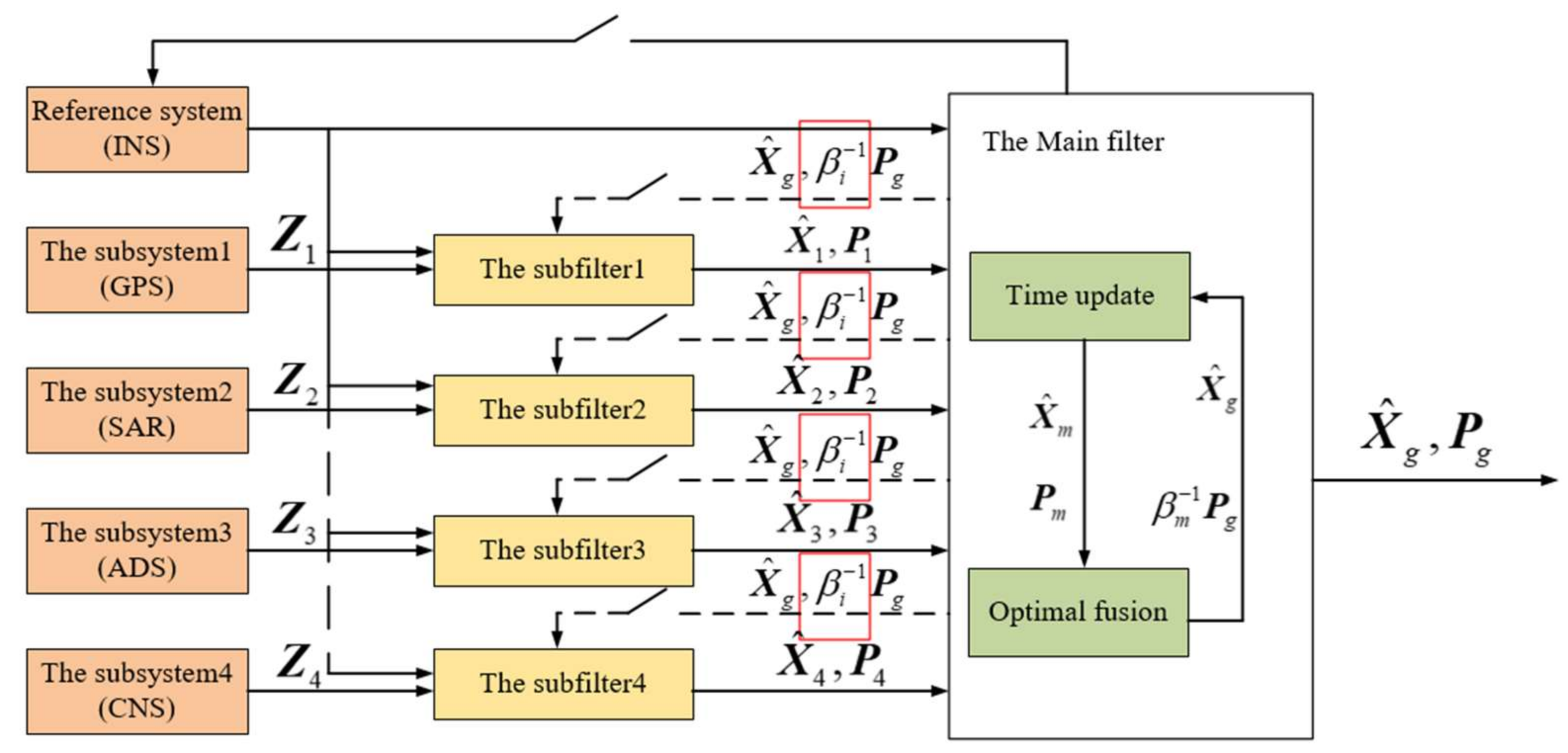
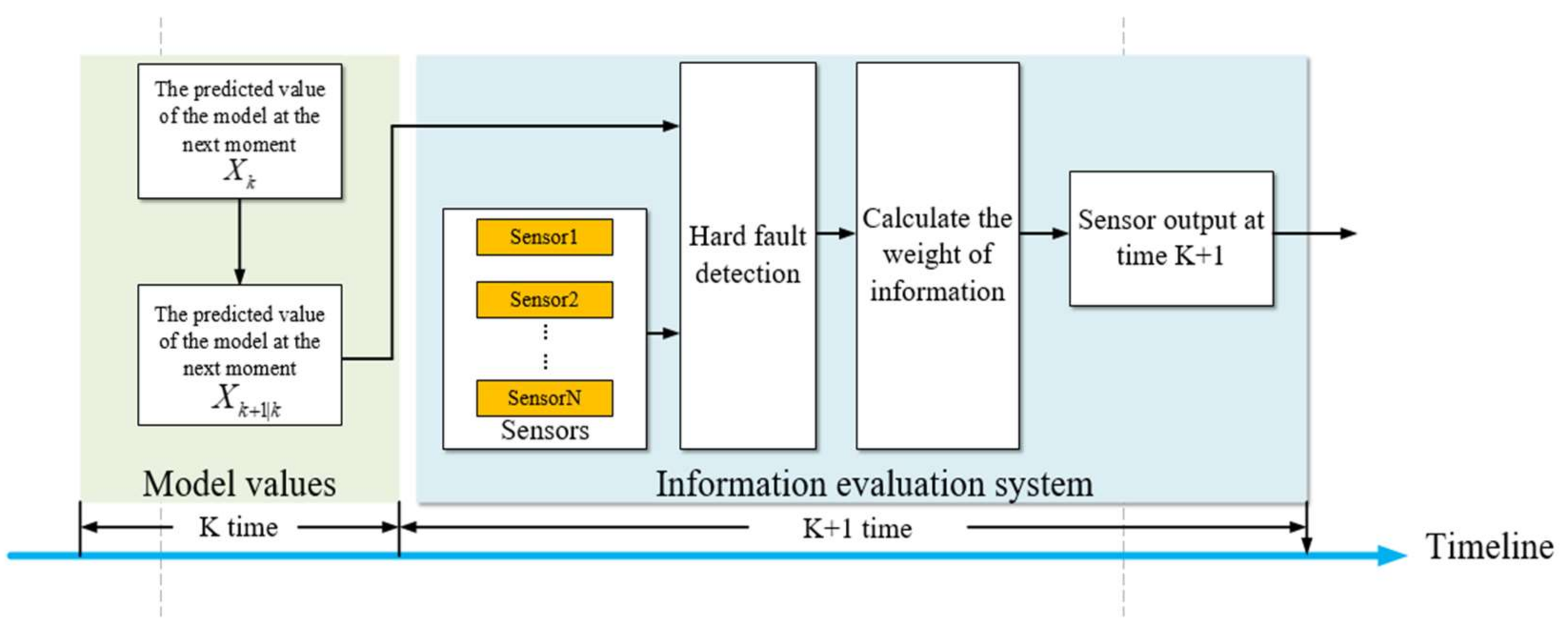
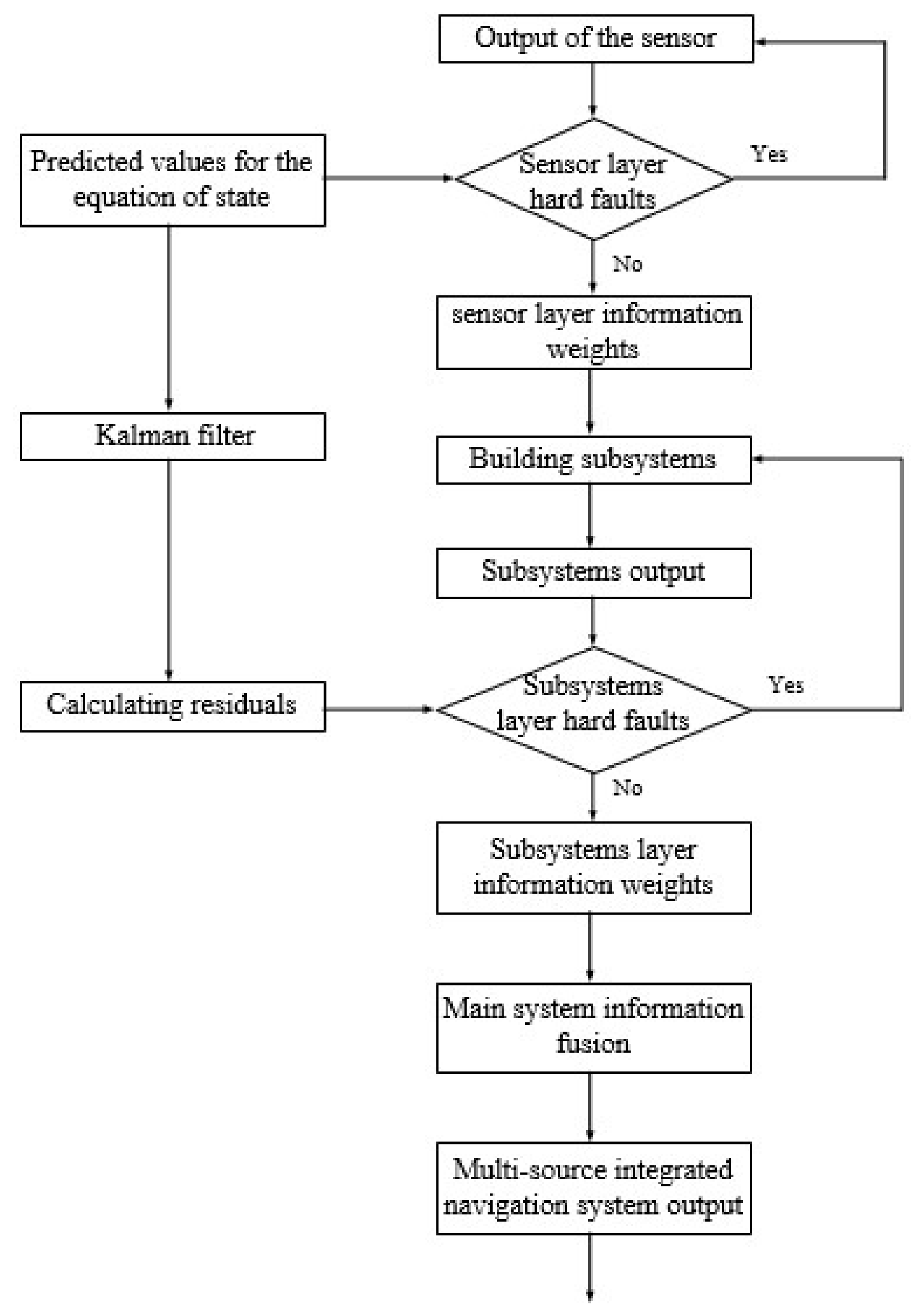
The above structure divides the aerospace vehicle navigation system into three levels. The first level structure is composed of various redundantly configured navigation sensors. Among them, taking inertial navigation as the reference navigation system to outputs the complete navigation parameters. Other navigation sensors output a part of navigation parameters and input the parameters to the on-line information evaluation system. In this system, combining with the output of navigation sensor and the one-step prediction value calculated by the state equation of navigation subsystem, hard fault detection is carried out. Then, according to the information disorder degree analysis theory, different weights are given to the navigation information contained in it, to realize the quantitative evaluation of sensor level information and fuse it to the second level navigation subsystem level.
The second level structure consists of different navigation subsystem. Similarly, the quantitative evaluation of the navigation subsystem shall be carried out first. Different from the sensor level, the redundant information here refers to the navigation parameters output by different navigation subsystems, such as attitude, position, and velocity. Therefore, on the basis of quantitative evaluation, the effectiveness evaluation system of navigation results and the qualitative evaluation shall be researched in combination with the characteristics of different navigation sensors. Finally, the comprehensive information evaluation weight coefficient is formed, and the complete navigation parameters are calculated and output to the third level fusion architecture.
The third level structure is data master fusion. The optimal fusion is carried out according to the filtering results of each subsystem and its own filtering value. At the same time, the error decoupling between the attitude and position of the navigation system is realized by using the evaluation system, and the global optimal estimation value is obtained.
2.2. Establish System Model
In this paper, the east-north-up geographic coordinate system is used as the reference coordinate system for navigation calculation, which is recorded as
coordinate system. It is assumed that the gyroscope drift error is composed of random walk and white noise, the accelerometer error is random walk. The three-dimensional platform error angle
, three-dimensional velocity error
, three-dimensional position error
, three-dimensional random walk of gyroscope
and three-dimensional random walk of accelerometer
. The above 15 variables constitute the state quantity of Kalman filter.
In (1), subscripts respectively indicate east, north, and up directions.
The system state equation is constructed as follows:
In (2) , is the system matrix; is the system noise matrix; is the system noise vector.
According to the error equation of inertial navigation system and the error model of inertial instruments in geographical coordinate system, the corresponding system matrix can be obtained as follows:
In (3),
is the
-dimensional basic navigation parameter matrix,
is the conversion matrix between the 9-dimensional basic navigation parameters and the 6-dimensional inertial device errors. Its specific form is as follows:
In (4), is the attitude conversion matrix from body coordinate system to the geographic coordinate system.
The system noise matrix
is:
The system noise vector
is:
After discretizing (2), the discrete state equation of the system can be obtained as follows:
In (7),
is the state quantity at moment
,
is the state quantity at moment
,
is the system state transfer matrix from moment
to moment
,
is the corresponding discrete system noise matrix, and
is the system noise at moment
.
is the iteration period.
State one-step prediction:
Under the current navigation technology conditions, the sensor configuration of aerospace vehicle navigation system is based on inertial navigation system (INS), assisted by variety of navigation measurement sensors, such as global satellite navigation system (GNSS), celestial navigation system (CNS), automatic dependent surveillance (ADS), synthetic aperture radar (SAR), etc. Combining with the above analysis, the measurement equations of each navigation subsystem are established:
In (11), The measurement information in the measurement equation consists of the difference in velocity, position, and attitude between the INS output and other sensors output. is the measurement noise matrix.
5. Conclusions
In the research, we have found that the sensors of the aerospace vehicle navigation system adopt redundant configuration, but the existing integrated navigation fusion architecture is difficult to make efficient use of redundant information, which leads to the problem that the fusion architecture does not have the resilient. So, a resilient multi-source integrated navigation method for aerospace vehicles based on on-line evaluation of redundant information has been proposed to improve the fault tolerance and robustness of the navigation system.
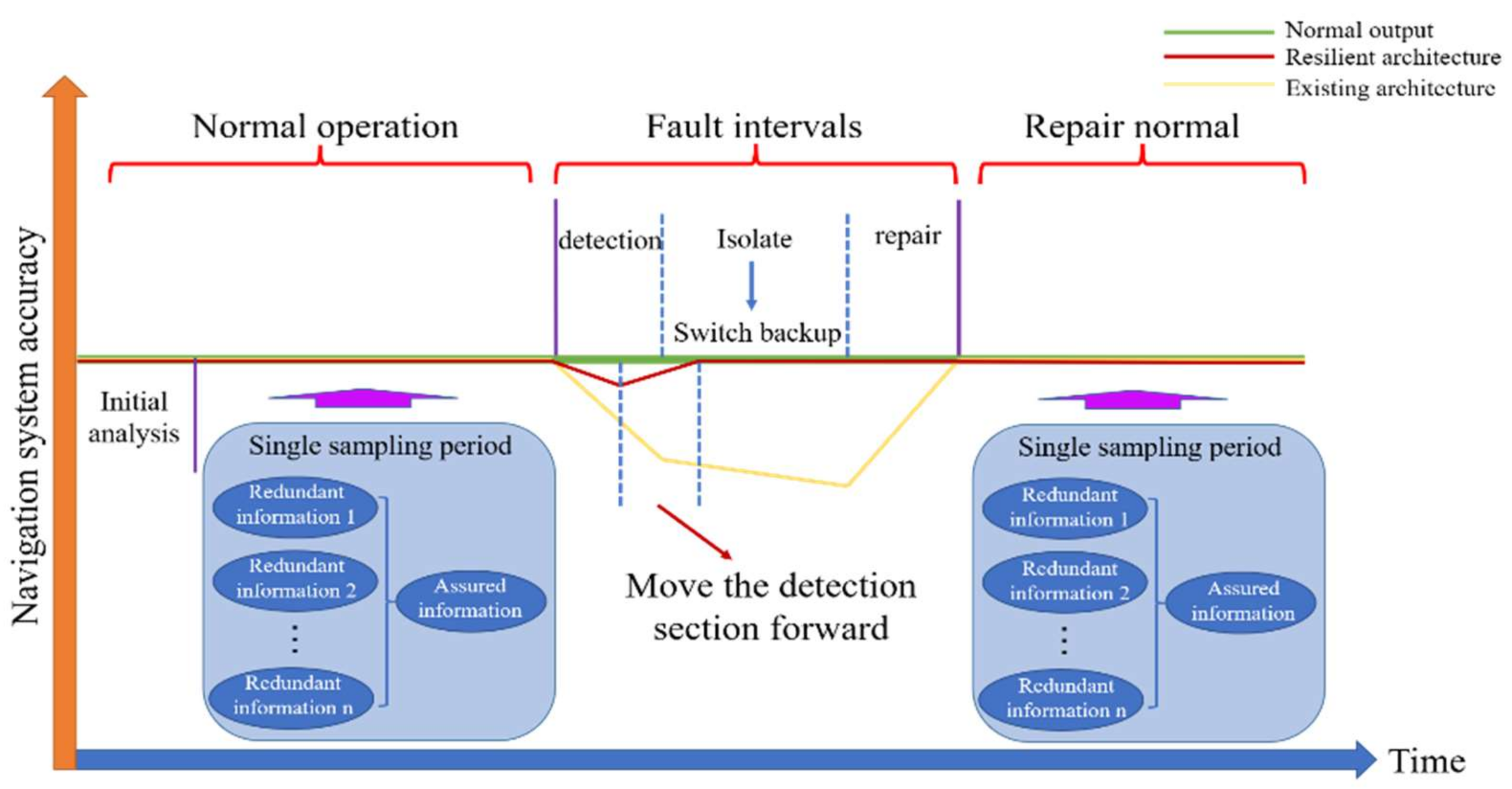
Firstly, this paper designs a multi-level and resilient redundant navigation information fusion architecture. According to the characteristics of the aerospace vehicle navigation system, the whole system has been divided into sensor level, subsystem level and main fusion level. The traditional navigation system outlier detection time interval is moved forward through the idea of hierarchical, so as to improve the reliability of the whole navigation system and realize the “non-stop” operation of its navigation system under abnormal conditions of some sensors.
Secondly, this paper integrates quantitative analysis and qualitative analysis. At the sensor level, quantitative analysis is realized through the theory of information disorder. At the subsystem level, an initial effectiveness evaluation system is formed according to the working principles and characteristics of heterogeneous navigation sensors and in combination with the expert system. During the flight of aerospace vehicles, the evaluation system is improved online according to the quantitative analysis results, then, the weight distribution coefficient of the federated filter is adaptively adjusted to improve the accuracy of the navigation system.
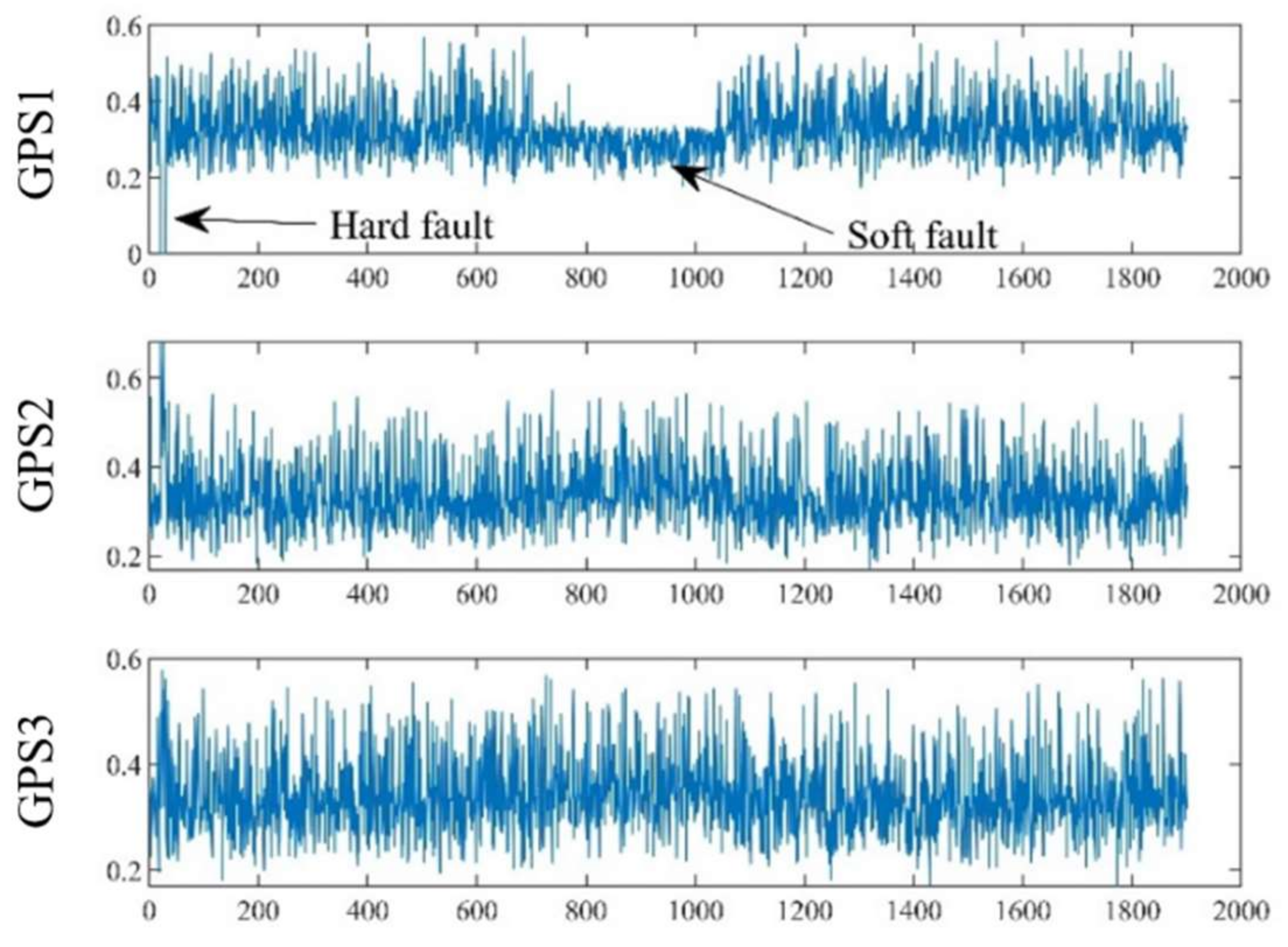
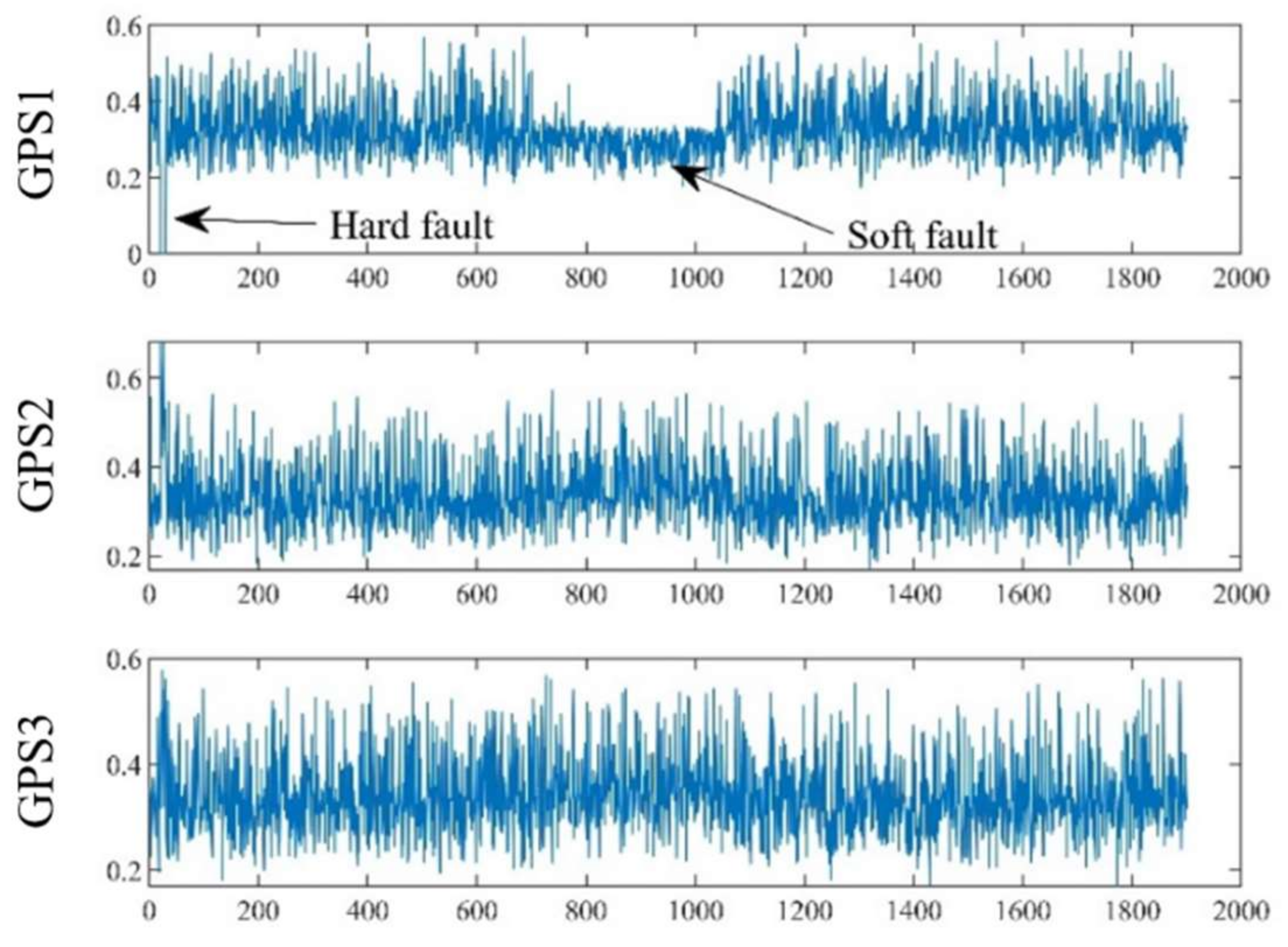
Finally, this paper uses the coupling relationship between the output parameters of heterogeneous navigation sensors and corrects each other through multi-level information evaluation to improve the robustness of aerospace vehicle navigation system. Particularly attention worthy is that the algorithm proposed in this paper can decouple the attitude error and position error in the configuration of multi-source redundant navigation system, which greatly reduces the probability of navigation system invalidation caused by various types of faults. The experimental results show that this algorithm can timely adjust the information output weight of each level in case of navigation sensor hard fault and soft fault, realize the “non-stop” operation of the navigation system in case of fault, and the accuracy is improved compared with the existing fault detection algorithms, which reflects the reliability and robustness of this algorithm.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}