
Coordinated Formation Guidance Law for Fixed-Wing UAVs Based on Missile Parallel Approach Method



Abstract
1. Introduction
2. Motion Analysis
2.1. Planar Kinematics of a UAV
2.2. Virtual Target Point of Later Plane
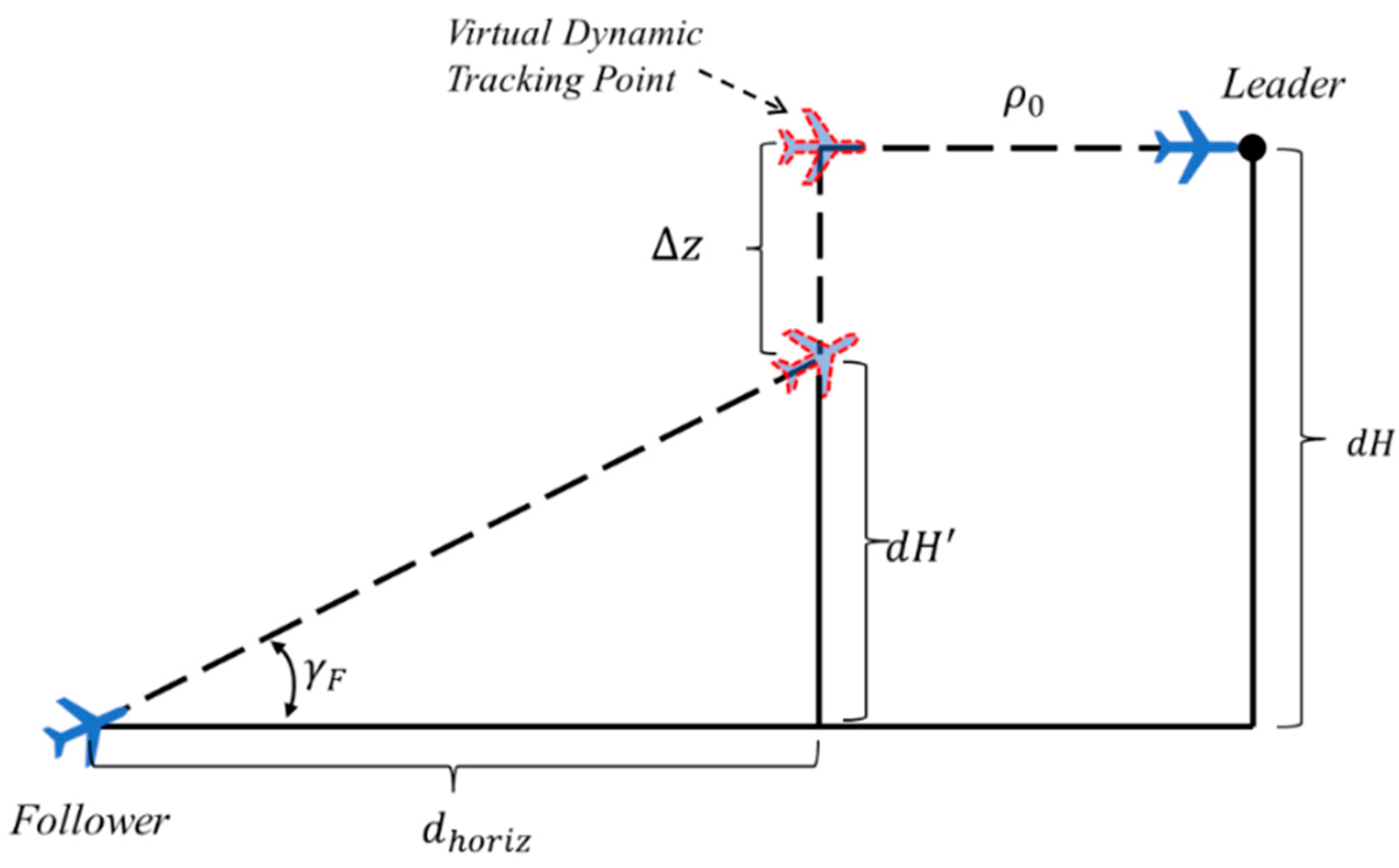
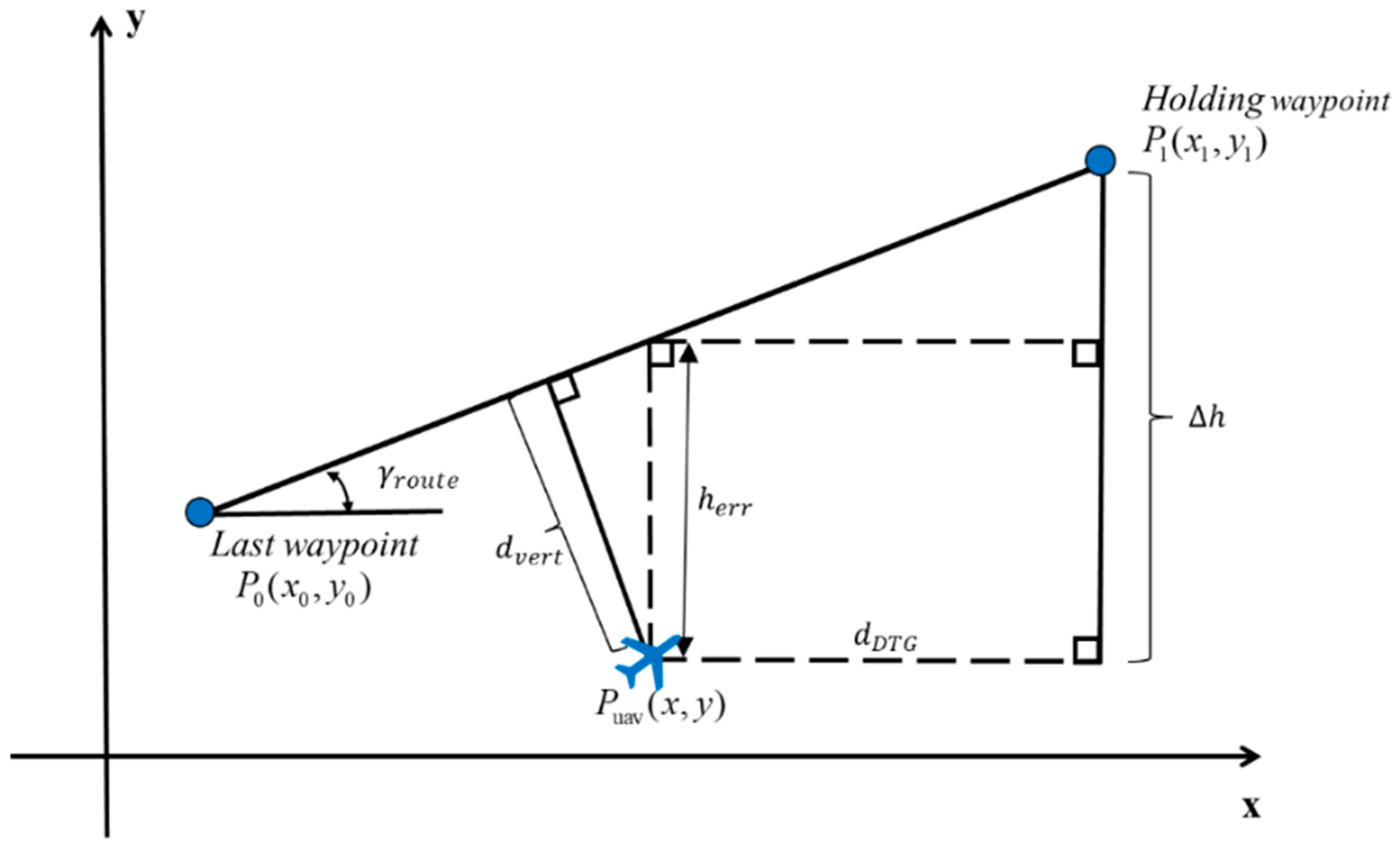
2.3. Longitudinal Motion Analysis
3. Guidance Law Design
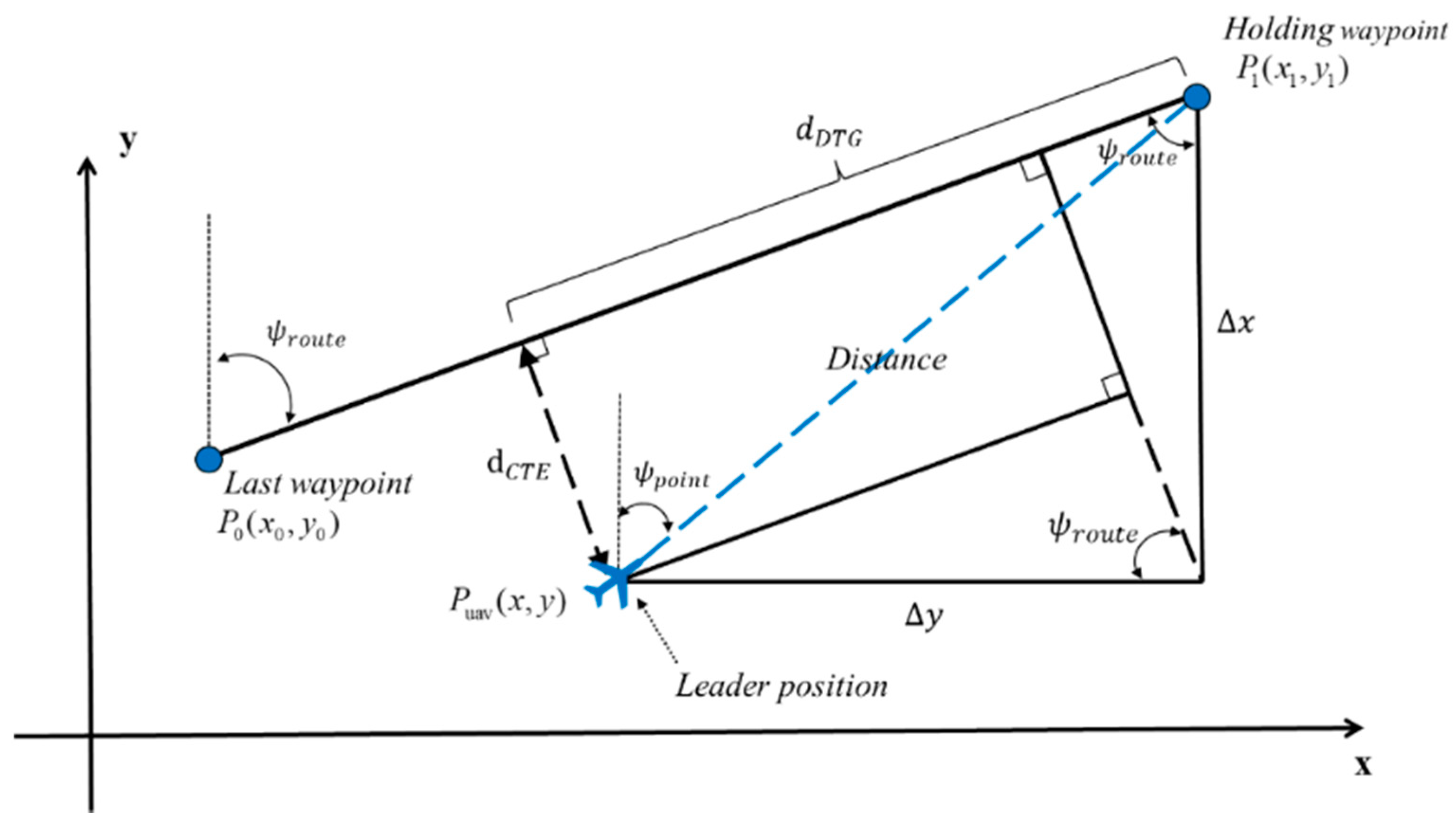
3.1. Leader Guidance Law
- Linear navigation mode
- 2.
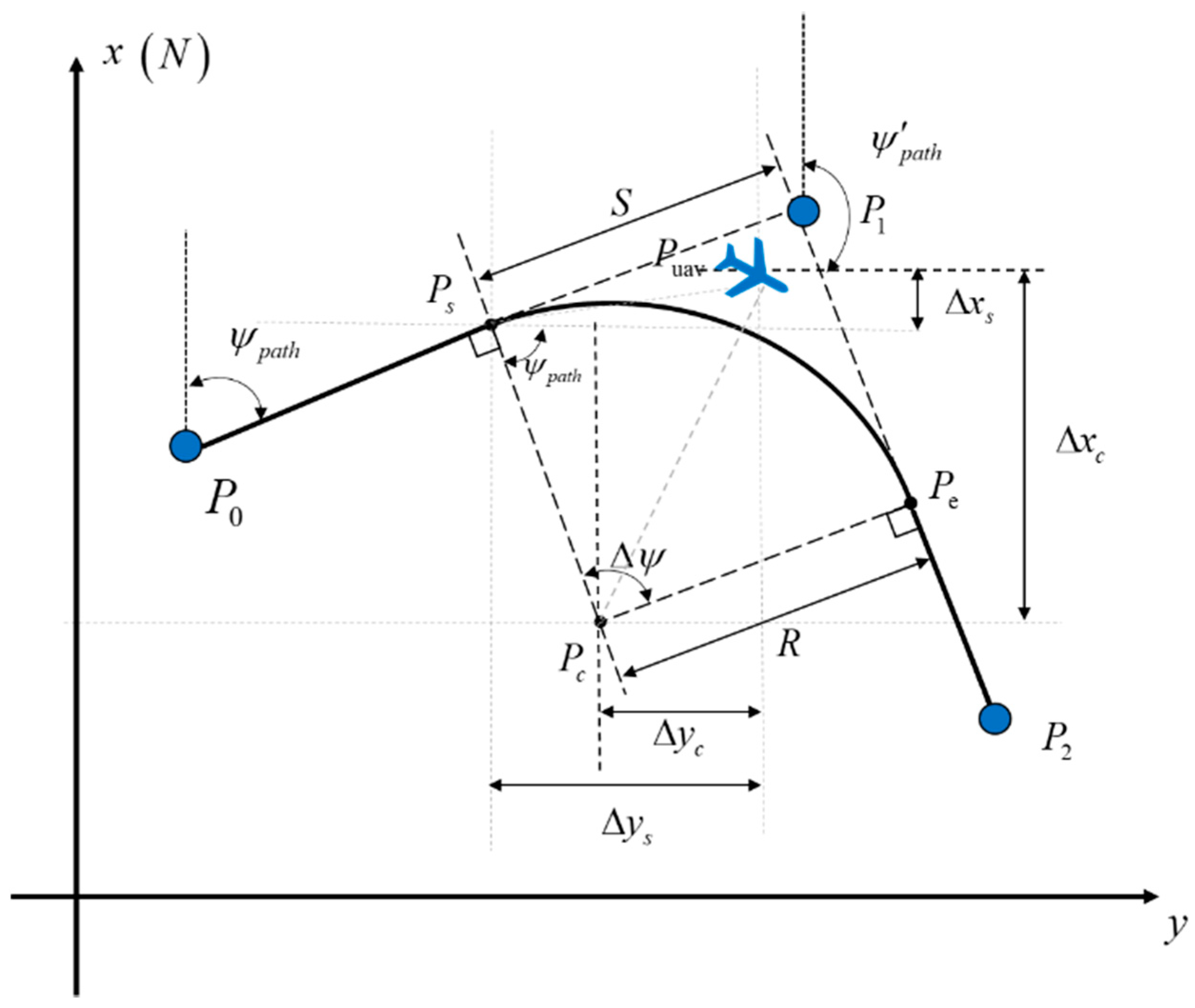
- Turn navigation mode
- 3.
- Hovering mode
3.2. Follower Guidance Law
- Calculation of lateral virtual dynamic tracking points
- 2.
- Collaborative guidance law design
3.3. Guidance Law Simulation Verification Results
4. Flight Verification
4.1. Hardware-in-the-Loop Simulations
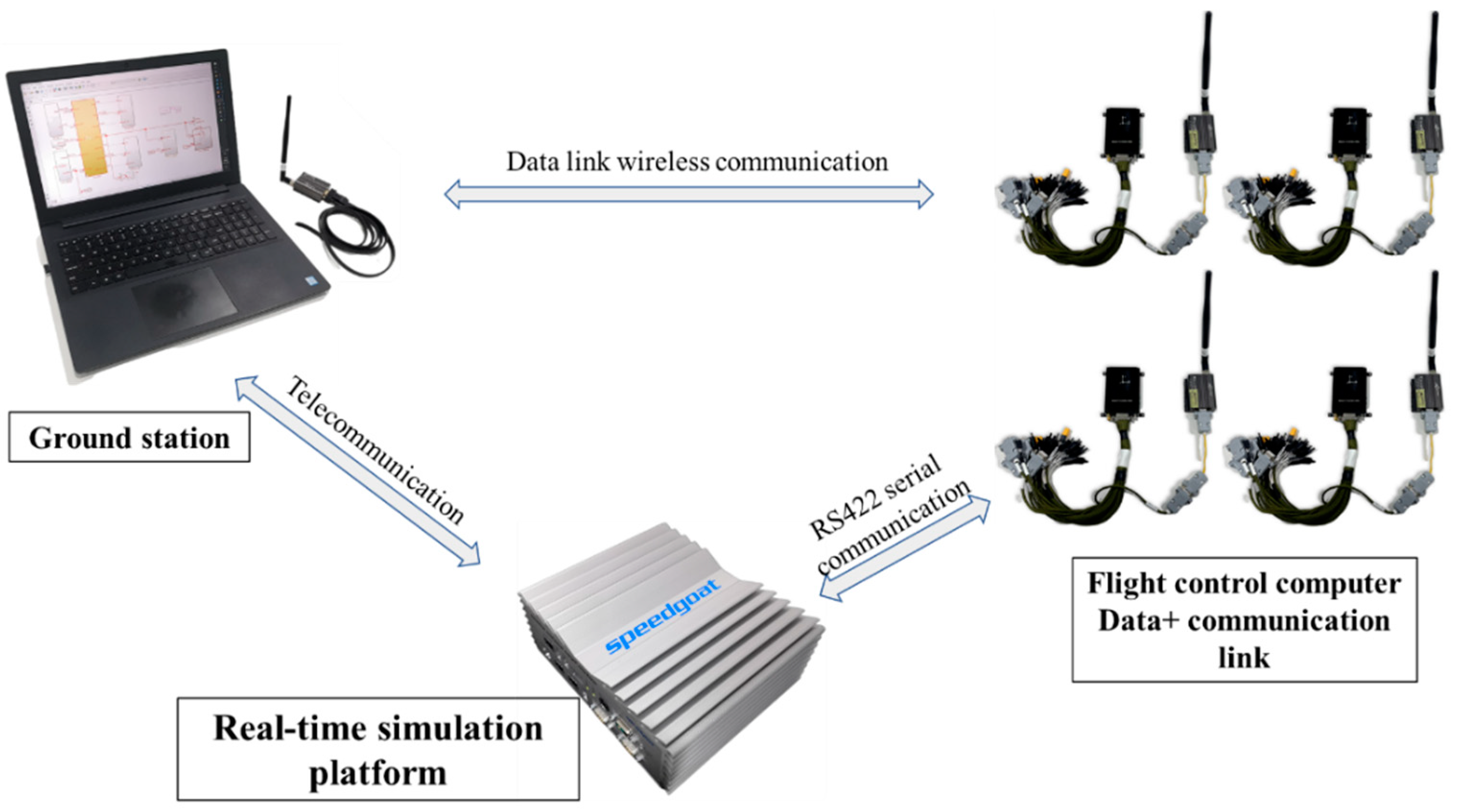
4.1.1. Simulation System Composition
4.1.2. Semi-Physical Simulation Process
- Case 1: Waypoint flight simulation of the lead aircraft
- Case 2: Flight simulation information mode
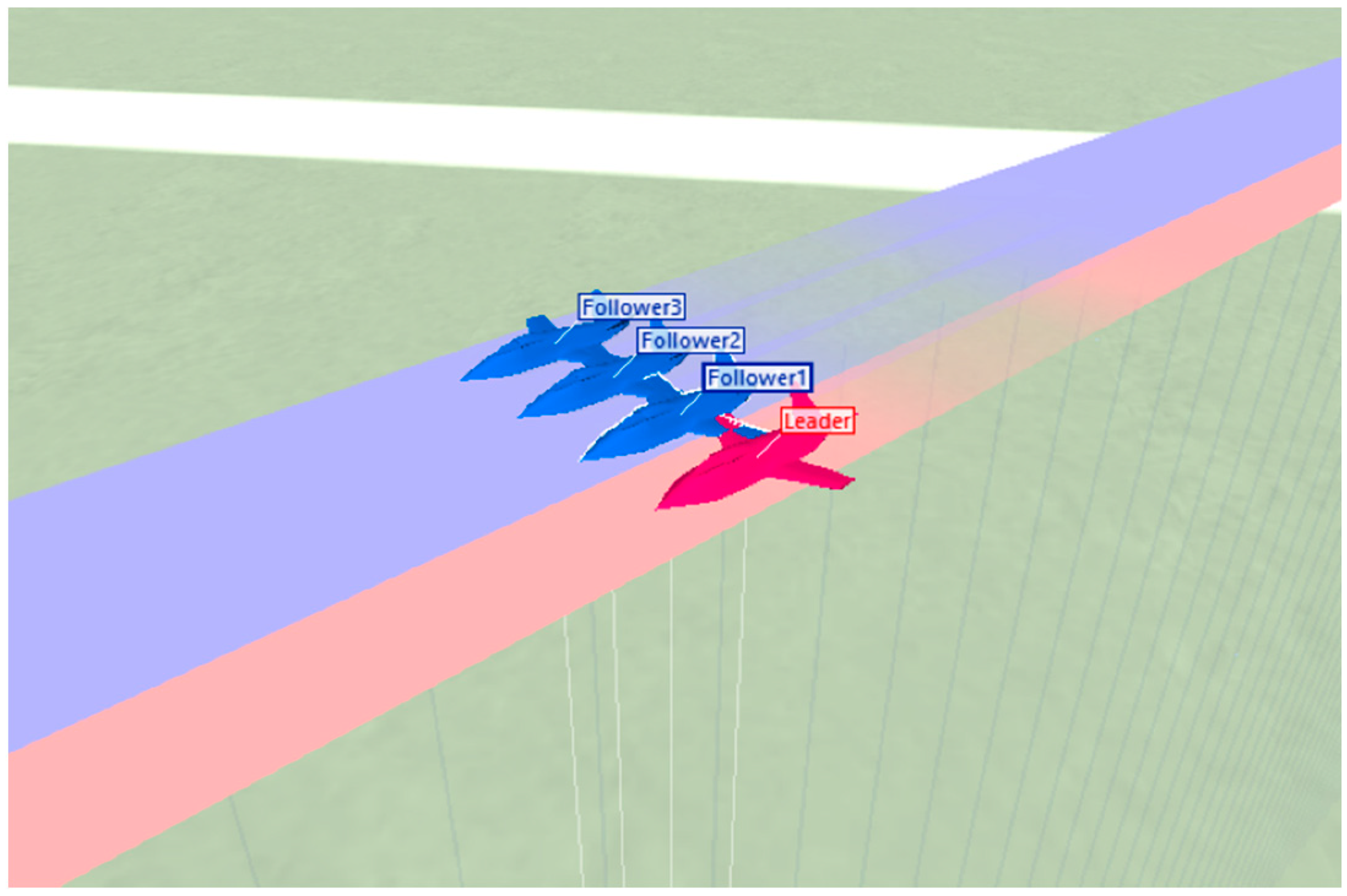
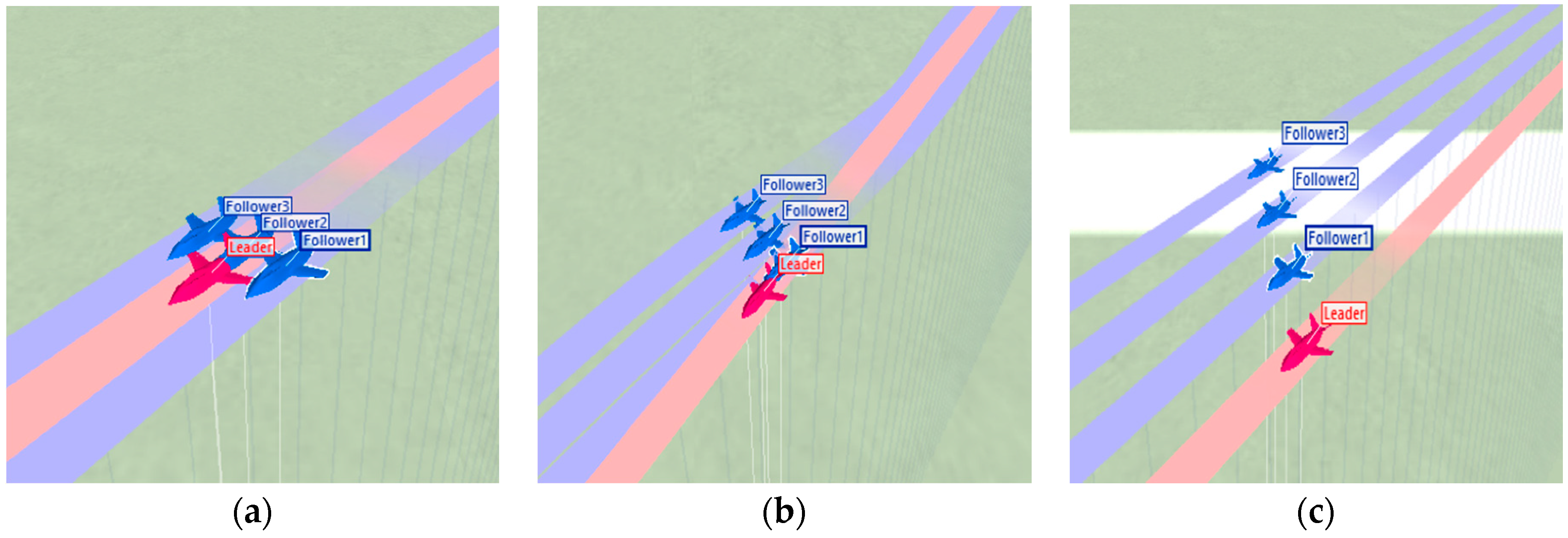
- Case 3: Formation transformation simulation
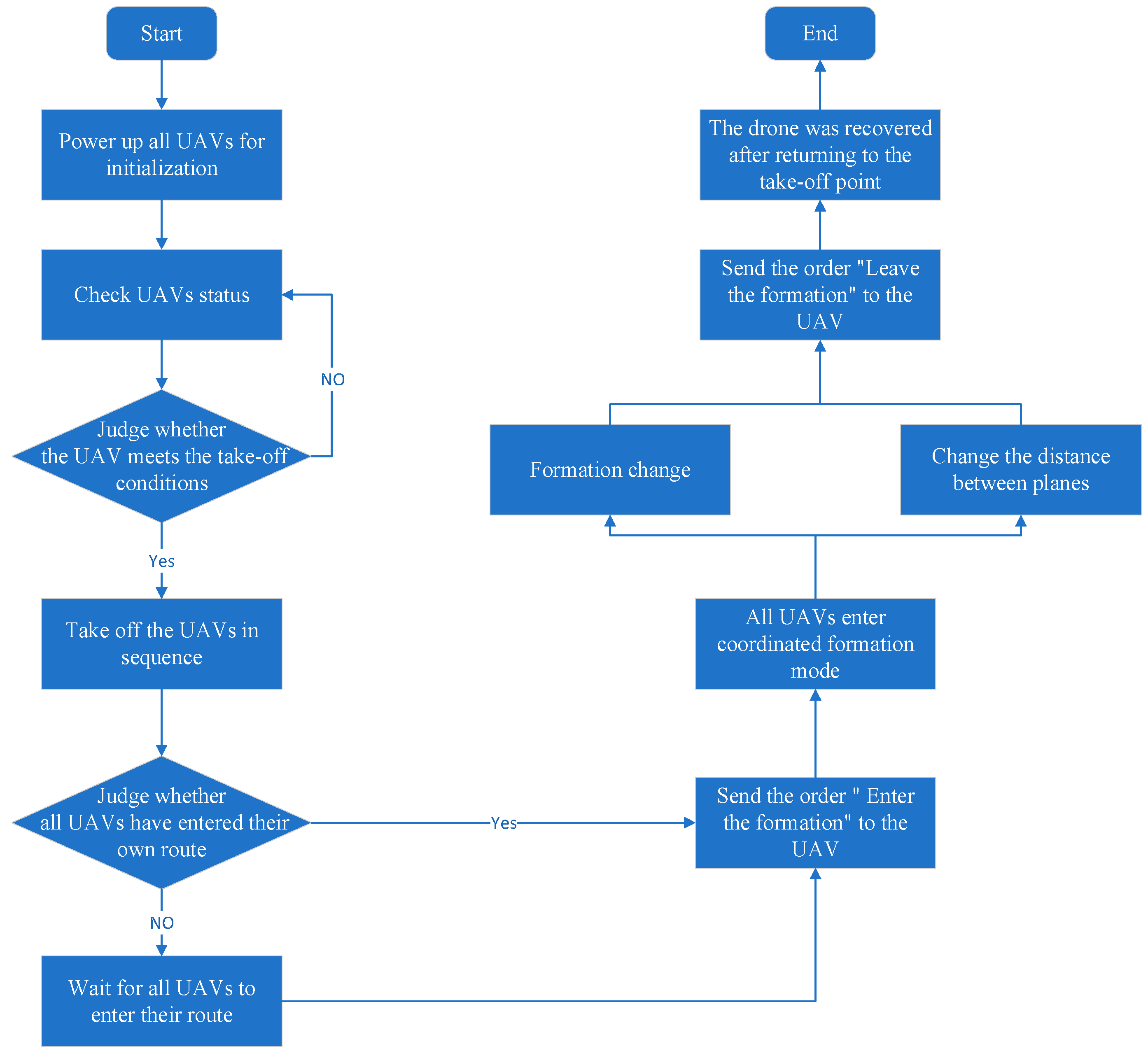
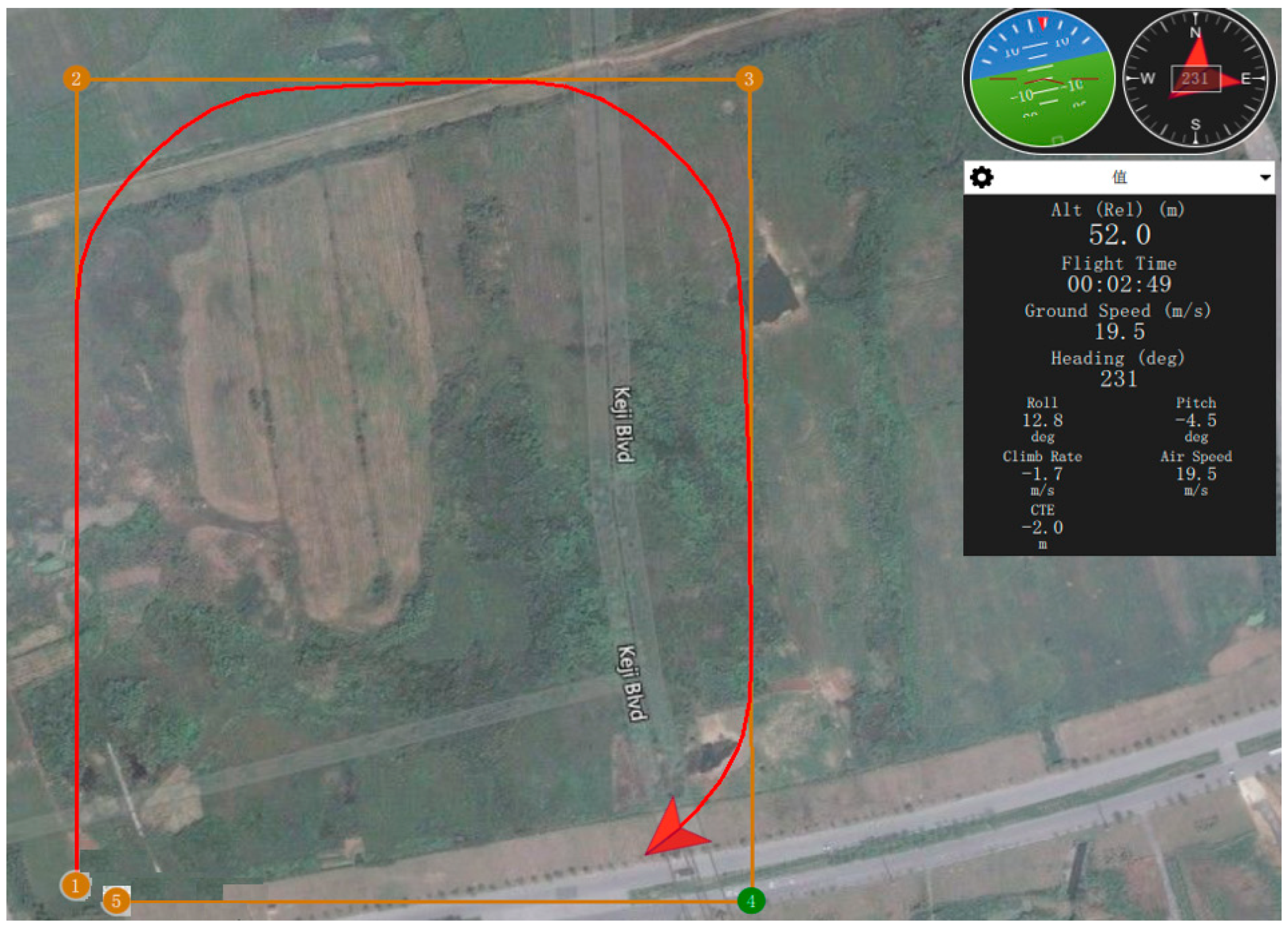
4.2. Results of Real Flight Test
4.3. Flight Data Analysis
5. Conclusions
- Commonly used guidance laws were studied, and the characteristics of each rule were compared and analyzed. Finally, the parallel approach method was chosen as the guidance law. The parallel approach method itself has no concept of bandwidth in theory, it is a geometric expression. Since there is no integral controller, there must be an error, which is caused by the control bandwidth of the inner loop, but it must converge at low frequencies and converge to zero. The advantage of using the parallel approach method for formations is that since the position is known, there is no need to observe the line-of-sight angular velocity, and there is no observer or differentiator argument. The accuracy and refresh rate of the observed position and velocity is much higher than that of hitting an unknown target through the seeker. A formation management method based on cooperative waypoint tracking was proposed, and several common formations were given as examples. The method of harmonious formation transformation will be considered in future studies.
- The MATLAB/Simulink simulation platform was used to model and simulate the designed cooperative formation control algorithm. Hardware-in-the-loop simulations and actual flight tests have demonstrated the practicality of the collaborative formation guidance algorithm. The control algorithm developed in this paper can also perform specific formation tasks. It is worth mentioning that the parallel approach method in the flight test is mainly applied to the follower tracking the lead vehicle, but the idea of tracking the virtual target point can also be applied to the lead vehicle tracking the reference route.
- Using the parallel approach method as the guidance method of the leader-follower mode not only increases the flexibility of the formation reorganization, but also can be applied to the formation guidance of high-speed vehicle.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gai, W.; Zhang, N.; Zhang, J.; Li, Y. A constant guidance law-based collision avoidance for unmanned aerial vehicles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 233, 1204–1216. [Google Scholar] [CrossRef]
- No, T.S.; Kim, Y.; Tahk, M.-J.; Jeon, G.-E. Cascade-type guidance law design for multiple-UAV formation keeping. Aerosp. Sci. Technol. 2011, 15, 431–439. [Google Scholar] [CrossRef]
- Sullivan, J.M. Evolution or revolution? The rise of UAVs. IEEE Technol. Soc. Mag. 2006, 25, 43–49. [Google Scholar] [CrossRef]
- Sanders, R. An Israeli Military Innovation: UAVs. JFQ Jt. Force Q. 2002, 33, 114–118. [Google Scholar]
- Isby, D.C. Us military vtol uavs. Air Int. 2016, 91, 22. [Google Scholar]
- Fan, Q.J.; Yang, Z.; Fang, T.; Shen, C. Research Status of Coordinated Formation Flight Control for Multi-UAVs. Acta Aeronaut. Astronaut. Sin. 2009, 30, 683–691. [Google Scholar]
- Xu, Z.D.; Shang, T.; Sun, R.M.; Wang, D.M. A Virtual Environment for Simulation of Formation Flight. Appl. Mech. Mater. 2015, 713–715, 263–266. [Google Scholar] [CrossRef]
- Joongbo, S.; Chaeik, A.; Youdan, K. Controller design for uav formation flight using consensus based decentralized approach. In Proceedings of the Aerospace Conference, Seattle, WA, USA, 6–9 September 2009. [Google Scholar]
- Linorman, N.; Liu, H. Formation UAV flight control using virtual structure and motion synchronization. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 11–13 June 2008. [Google Scholar]
- Zhang, J.M.; Qing, L.I.; Cheng, N.; Liang, B. Nonlinear path-following method for fixed-wing unmanned aerial vehicles. J. Zhejiang Univ. Sci. C Comput. Electron. 2013, 14, 125–132. [Google Scholar] [CrossRef]
- Zhang, M.; Xia, W.; Huang, K.; Chen, X. Guidance law for cooperative tracking of a ground target based on leader-follower formation of UAVs. Acta Aeronaut. Astronaut. Sin. 2018, 39, 230–242. [Google Scholar]
- Park, C.; Kim, Y. Real-time leader-follower UAV formation flight based on modified nonlinear guidance. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences (ICAS), Saint Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Wang, Y.; Shan, M.; Wang, D. Motion Capability Analysis for Multiple Fixed-Wing UAV Formations with Speed and Heading Rate Constraints. IEEE Trans. Control. Netw. Syst. 2019, 7, 977–989. [Google Scholar] [CrossRef]
- Kalra, A.; Anavatti, S.; Padhi, R. Aggressive Formation Flying of Fixed-Wing UAVs with Differential Geometric Guidance. Un. Syst. 2017, 5, 97–113. [Google Scholar] [CrossRef]
- Oh, Y.S.; Park, J.H.; Kim, J.H.; Huh, U.Y. Obstacle Avoidance of Leader-Follower Formation. Trans. Korean Inst. Electr. Eng. 2011, 60, 1761. [Google Scholar] [CrossRef][Green Version]
- Lee, D.; Kim, S.-K.; Suk, J. Design of a Track Guidance Algorithm for Formation Flight of UAVs. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017; pp. 469–482. [Google Scholar]
- Wang, X. A Cooperative Guidance Law for UAVs Target Tracking. WSEAS Trans. Syst. 2021, 19, 324–335. [Google Scholar] [CrossRef]
- Wang, S.; Wei, R.; Guo, Q.; Wei, W. UAV Guidance Law for Coordinated Standoff Target Tracking. Hangkong Xuebao Acta Aeronaut. Astronaut. Sin. 2014, 35, 1684–1693. [Google Scholar]
- Zipfel, P.H. Aerodynamic symmetry of aircraft and guided missiles. J. Aircr. 1976, 13, 470–475. [Google Scholar] [CrossRef]
- Feng, Q.D.; Pei, H.L. The Design of Hardware-in-the-loop Simulation for UAV. Fire Control Command Control 2011, 36, 166–168. [Google Scholar]
- Sun, J.; Li, B.; Wen, C.Y.; Chen, C.K. Design and implementation of a real-time hardware-in-the-loop testing platform for a dual-rotor tail-sitter unmanned aerial vehicle. Mechatronics 2018, 56, 1–15. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Guidance Law | Overload | Trajectory | Mobility |
|---|---|---|---|
| Line-of-sight tracking | Large | Curved | Poor |
| Proportional guidance | Small | Slightly curved | Strong |
| Parallel approach | Small | Straight | Strong |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, Z.; Zhou, Z.; Wang, Z.; Lv, Q.; Xu, J.; Jiang, Y. Coordinated Formation Guidance Law for Fixed-Wing UAVs Based on Missile Parallel Approach Method. Aerospace 2022, 9, 272. https://doi.org/10.3390/aerospace9050272
Gong Z, Zhou Z, Wang Z, Lv Q, Xu J, Jiang Y. Coordinated Formation Guidance Law for Fixed-Wing UAVs Based on Missile Parallel Approach Method. Aerospace. 2022; 9(5):272. https://doi.org/10.3390/aerospace9050272
Chicago/Turabian StyleGong, Zheng, Zan Zhou, Zian Wang, Quanhui Lv, Jinfa Xu, and Yunpeng Jiang. 2022. "Coordinated Formation Guidance Law for Fixed-Wing UAVs Based on Missile Parallel Approach Method" Aerospace 9, no. 5: 272. https://doi.org/10.3390/aerospace9050272
APA StyleGong, Z., Zhou, Z., Wang, Z., Lv, Q., Xu, J., & Jiang, Y. (2022). Coordinated Formation Guidance Law for Fixed-Wing UAVs Based on Missile Parallel Approach Method. Aerospace, 9(5), 272. https://doi.org/10.3390/aerospace9050272