
Spaceborne Atom-Interferometry Gravity Gradiometry Design towards Future Satellite Gradiometric Missions


Abstract
1. Introduction
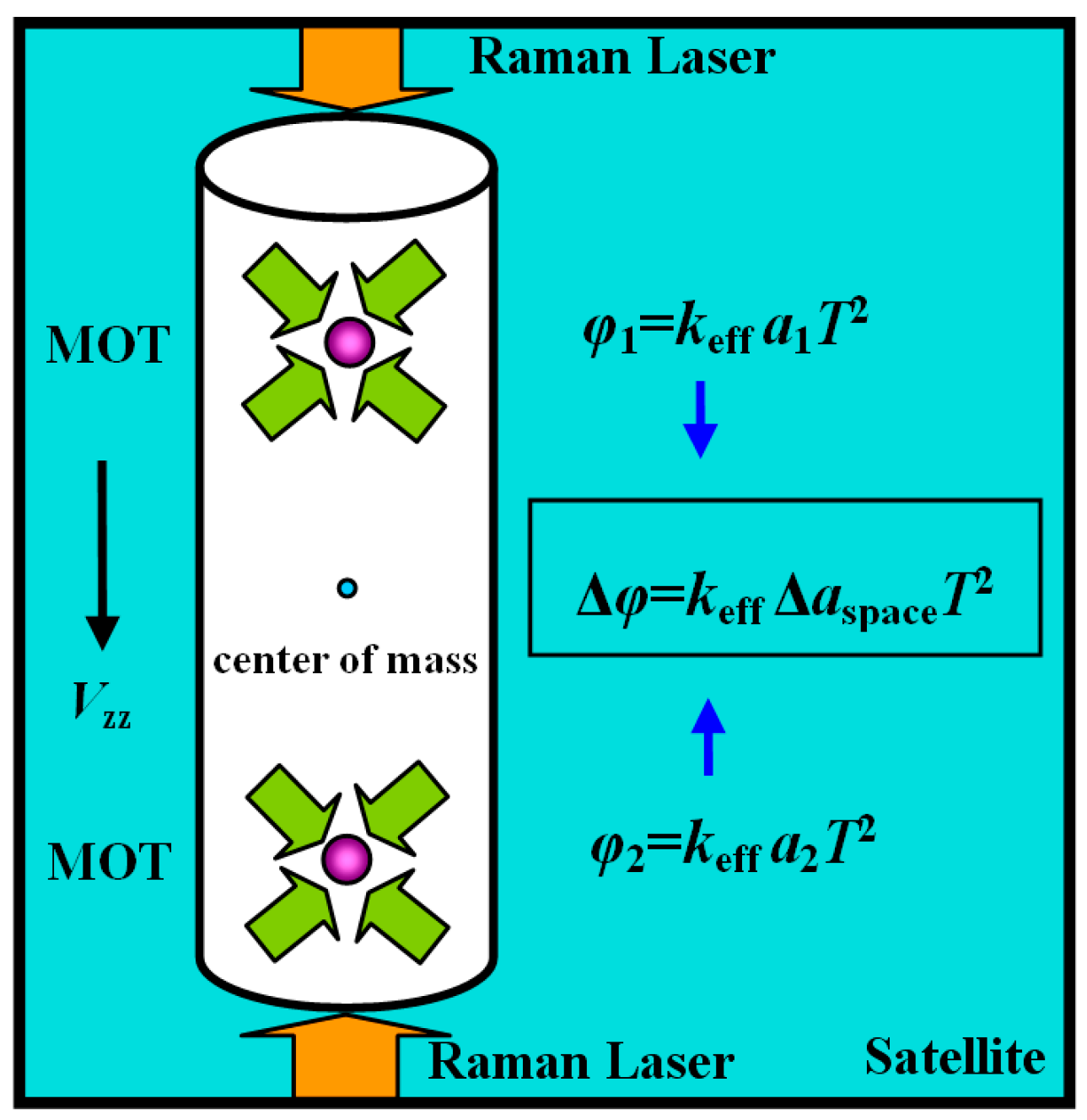
2. Principle of Atom-Interferometry Gravity Gradiometry in Space
3. SGG Mission Concept Based on Atom-Interferometry Gravity Gradiometry
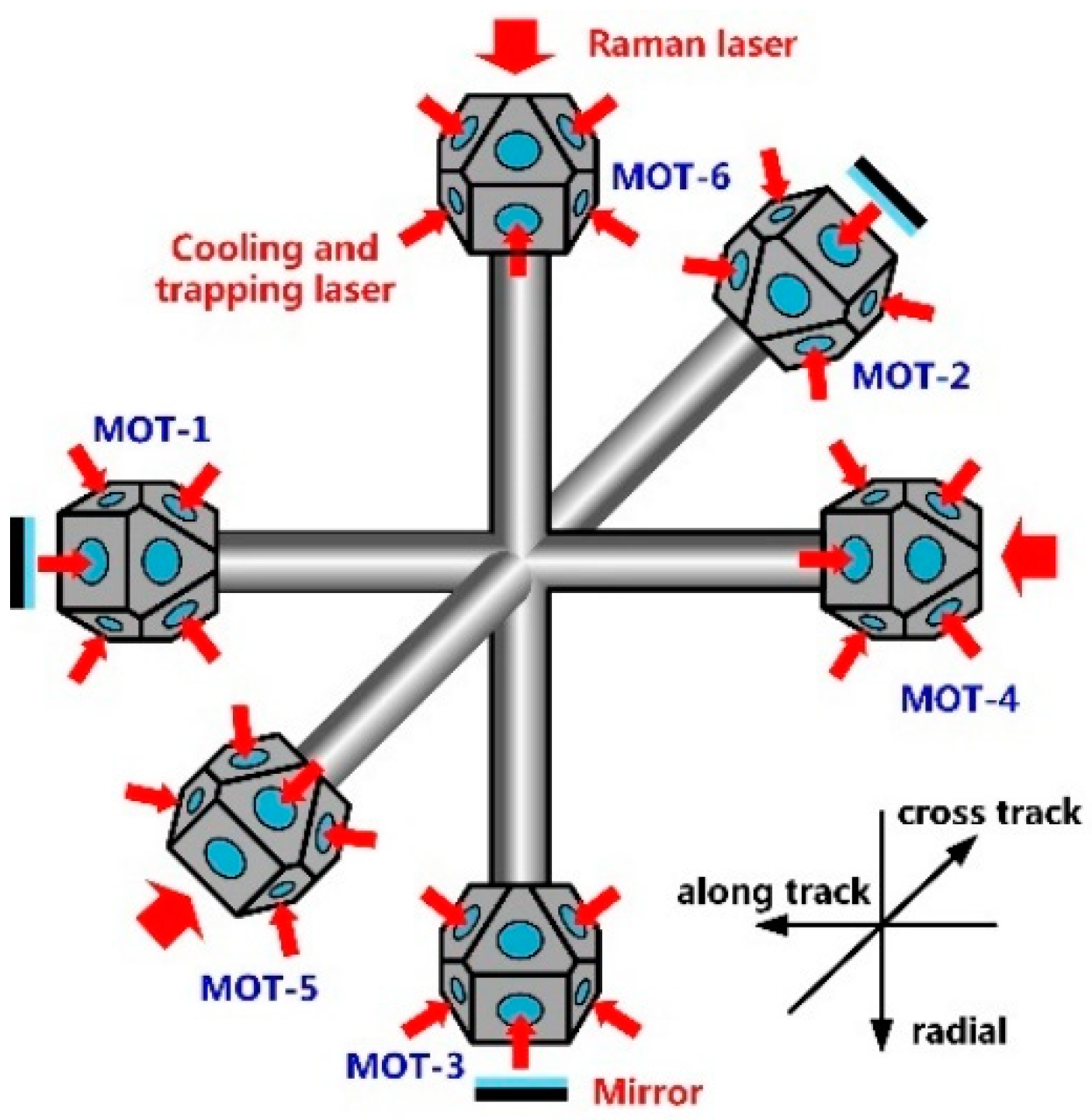
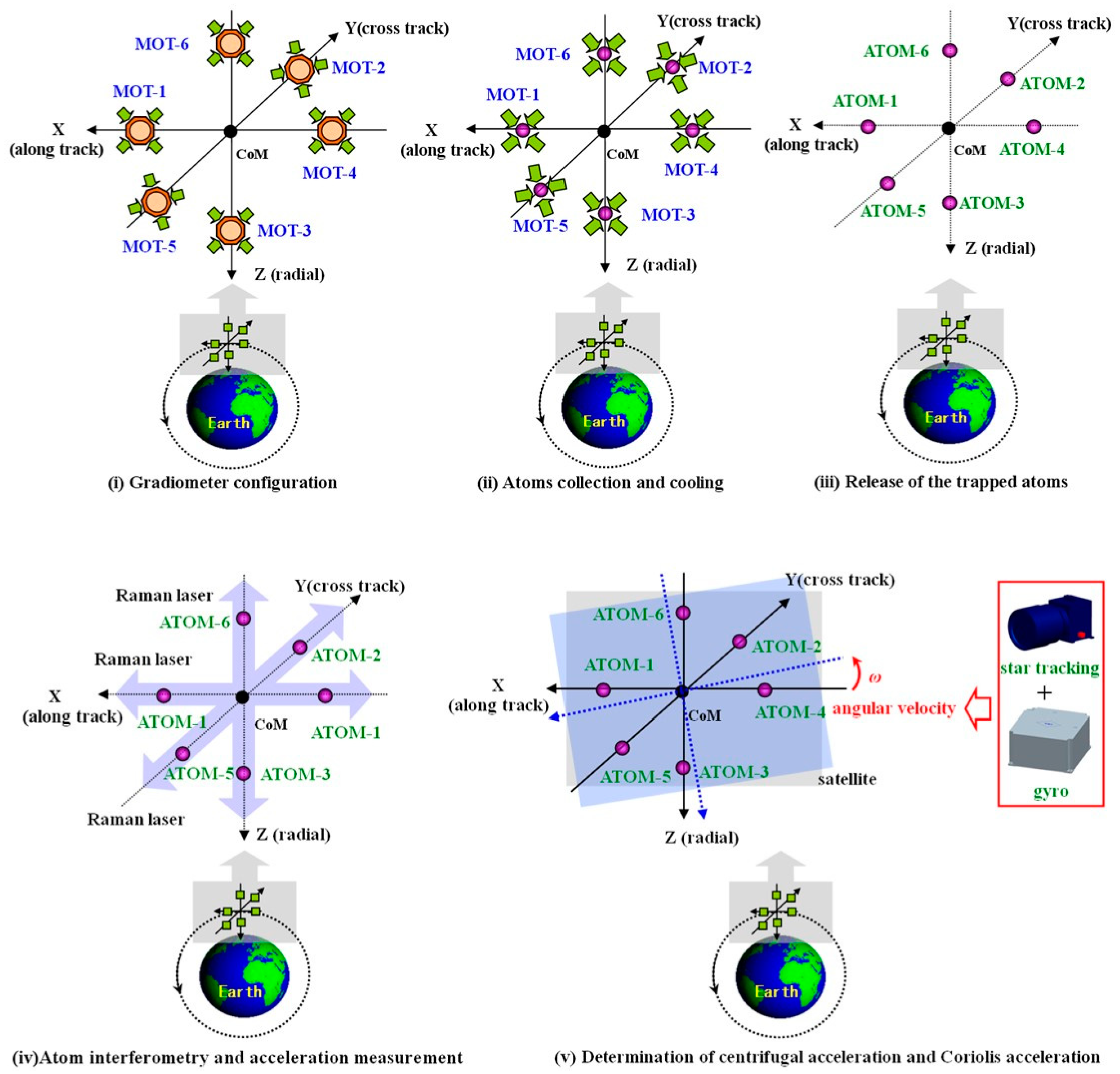
3.1. Measurement Concept for Spaceborne Atom-Interferometry Gravity Gradiometer
3.2. Optimization of Basic Parameters for Atom-Interferometry-Based SGG
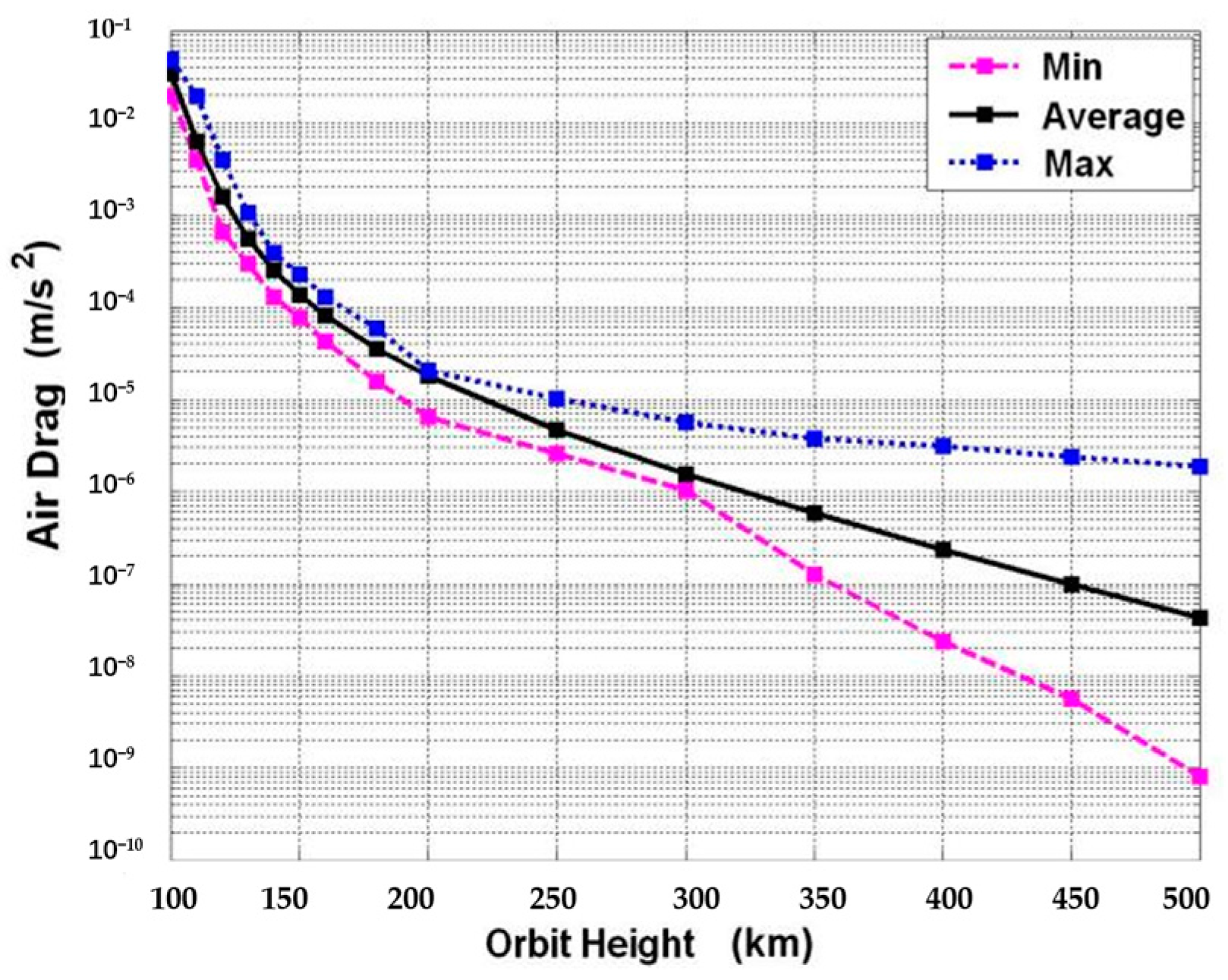
3.2.1. Optimization of Orbital Parameters
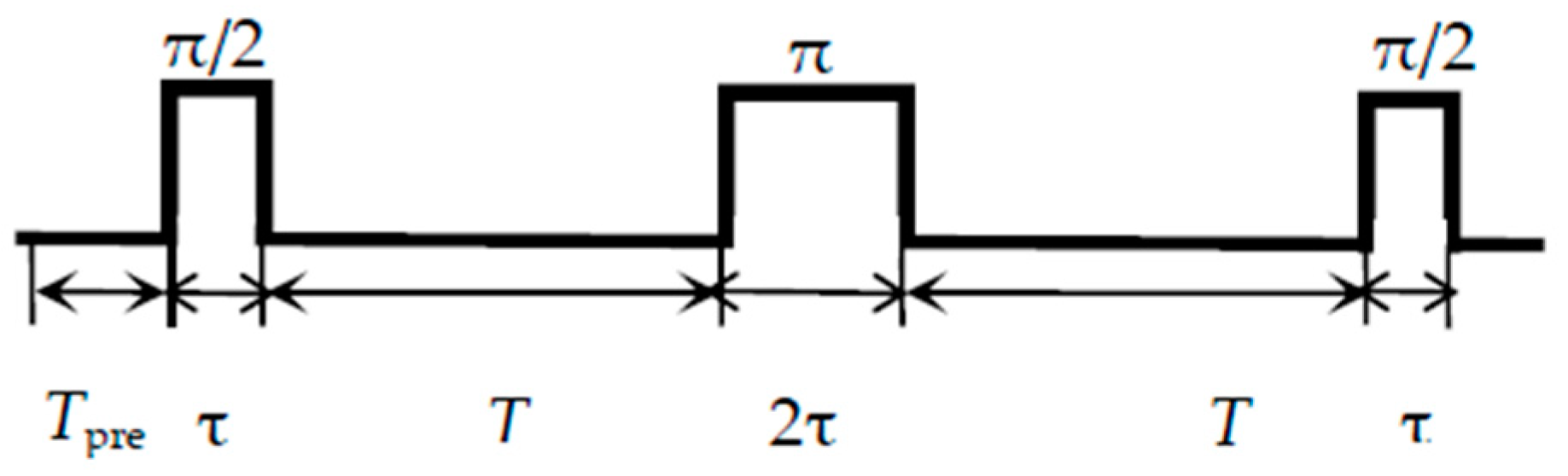
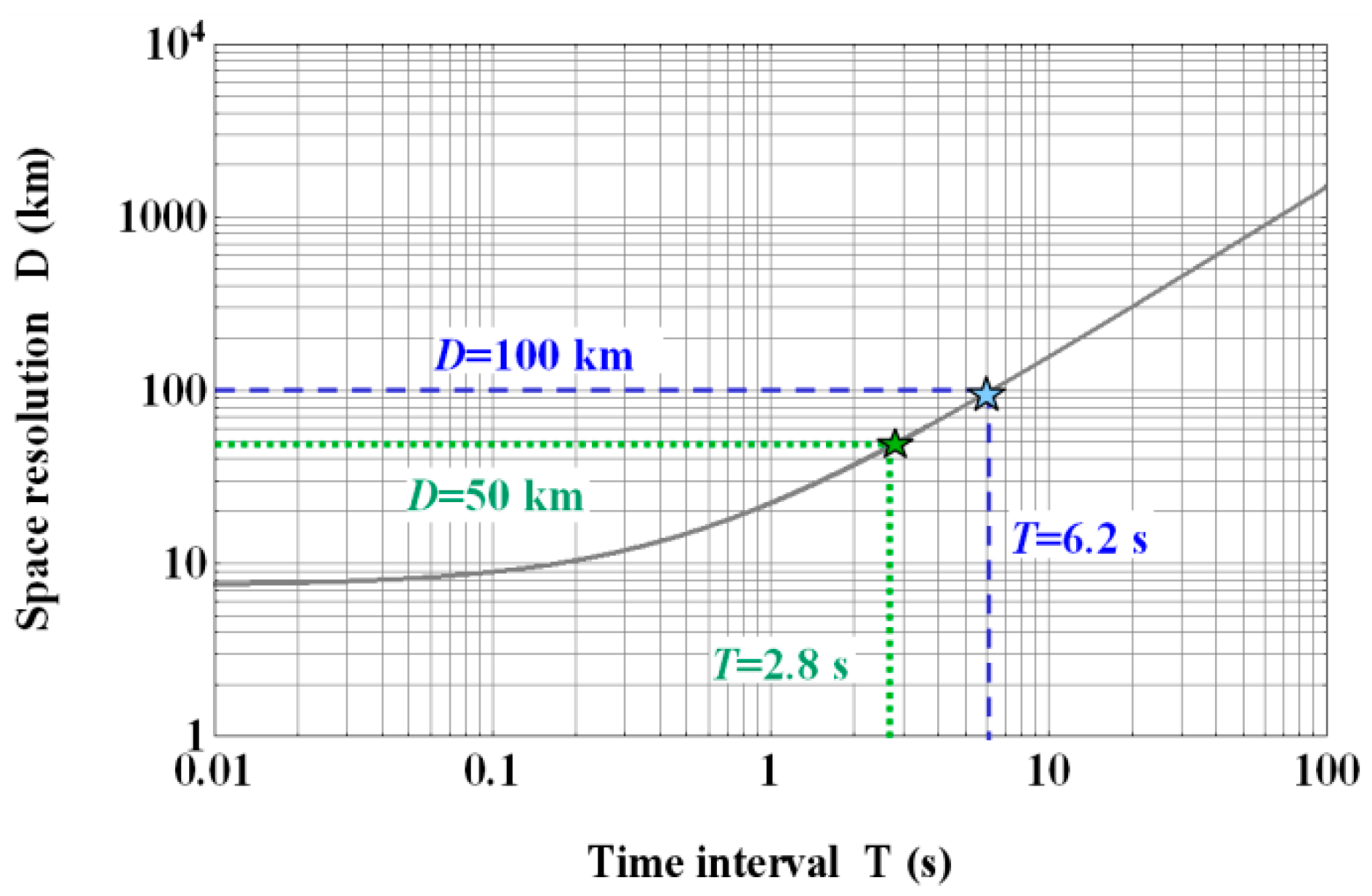
3.2.2. Optimization of Interrogation Time for Atom Interferometry
3.3. Expected Sensitivity of the Spaceborne Atom-Interferometry Gravity Gradiometry
3.3.1. Differential Acceleration Measurement
3.3.2. Recovery of the Satellite Angular Effects
3.3.3. External Disturbances
3.3.4. Summary of Noise Contribution
3.4. Feasibility for Implementation of the Atom-Interferometry-Based SGG
3.5. Summary of the Measuring Characteristics and Requirements
4. Improvements of the Earth’s Gravity Field Determination
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Floberghagen, R.; Fehringer, M.; Lamarre, D.; Muzi, D.; Frommknecht, B.; Steiger, C.; Piñeiro, J.; da Costa, A. Mission design, operation and exploitation of the Gravity Field and Steady-state Ocean Circulation Explorer mission. J. Geod. 2011, 85, 749–758. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhou, Z.B.; Cai, L.; Bai, Y.Z. Electrostatic gravity gradiometer design for the future mission. Adv. Space Res. 2013, 51, 2269–2276. [Google Scholar] [CrossRef]
- Rummel, R.; Yi, W.Y.; Stummer, C. GOCE gravitational gradiometry. J. Geod. 2011, 85, 777–790. [Google Scholar] [CrossRef]
- Drinkwater, M.R.; Haagmans, R.; Muzi, D.; Popescu, A. The GOCE mission: ESA’s first core Earth explorer. In Proceedings of the International GOCE User Workshop, Rome, Italy, 6–8 November 2006. [Google Scholar]
- Sorrentino, F.; Bodart, Q.; Cacciapuoti, L.; Lien, Y.H.; Prevedelli, M.; Rosi, G.; Salvi, L.; Tino, G.M. Sensitivity limits of a Raman atom interferometer as a gravity gradiometer. Phys. Rev. Appl. 2014, 89, 023607. [Google Scholar] [CrossRef]
- Wang, Y.P.; Zhong, J.Q.; Song, H.W.; Zhu, L.; Li, Y.M.; Chen, X.; Li, R.; Wang, J.; Mingsheng, Z. Location-dependent Raman transition in gravity-gradient measurements using dual atom interferometers. Phys. Rev. Appl. 2017, 95, 053612. [Google Scholar] [CrossRef]
- Silvestrin, P.; Aguirre, M.; Massotti, L.; Leone, B. The future of the satellite gravimetry after the GOCE mission. In Geodesy for Planet Earth; Kenyon, S., Ed.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 223–230. [Google Scholar]
- Tino, G.M.; Sorrentino, F.; Aguilera, D.; Battelier, B.; Bertoldi, A.; Bodart, Q.; Bongs, K.; Bouyer, K.; Braxmaier, C.; Cacciapuoti, L.; et al. Precision Gravity Tests with Atom Interferometry in Space. Nucl. Phys. B 2013, 243–244, 203–217. [Google Scholar] [CrossRef]
- Carraz, O.; Siemes, C.; Massotti, L.; Haagmans, R. A spaceborne gravity gradiometer concept based on cold atom interferometers for measuring Earth’s gravity field. Microgravity Sci. Technol. 2014, 26, 139–145. [Google Scholar] [CrossRef]
- Sorrentino, F.; Bongs, K.; Bouyer, P.; Cacciapuoti, L. The space atom interferometer project: Status and prospects. J. Phys. 2011, 327, 012050. [Google Scholar] [CrossRef]
- Bidel, Y.; Carraz, O.; Charrière, R.; Cadoret, M.; Zahzam, N.; Bresson, A. Compact cold atom gravimeter for field applications. Appl. Phys. Lett. 2013, 102, 144107. [Google Scholar]
- Wu, X. Gravity Gradient Survey with a Mobile Atom Interferometer. Master’s Dissertation, Stanford University, Stanford, CA, USA, 2009. [Google Scholar]
- Sorrentino, F.; Bongs, K.; Bouyer, P.; Cacciapuoti, L.; Angelis, M.D.; Dittus, H.; Ertmer, W.; Giorgini, A.; Hartwig, J.; Hauth, M.; et al. A compact atom interferometer for future space missions. Microgravity Sci. Technol. 2010, 22, 551–561. [Google Scholar] [CrossRef]
- Yu, N.; Kogel, J.M.; Kellogg, J.R.; Maleki, L. Development of an atom-interferometer gravity gradiometer for gravity measurement from space. Appl Phys B 2006, 84, 647–652. [Google Scholar] [CrossRef]
- Könemann, T.; Brinkmann, W.; Göklü, E.; Lämmerzahl, C.; Dittus, H.; van Zoest, T.; Rasel, E.M.; Ertmer, W.; Lewoczko-Adamczyk, W.; Schiemangk, M.; et al. A freely falling magneto-optical trap drop tower experiment. Appl. Phys. B 2007, 89, 431–438. [Google Scholar] [CrossRef]
- Müntinga, H.; Ahlers, H.; Krutzik, M.; Wenzlawski, A.; Arnold, S.; Becker, D.; Bongs, K.; Dittus, H.; Duncker, H.; Gaaloul, N.; et al. Interferometry with Bose-Einstein condensates in microgravity. Phys. Rev. Lett. 2013, 110, 093602. [Google Scholar] [CrossRef] [PubMed]
- Geiger, R.; Ménoret, V.; Stern, G.; Zahzam, N.; Cheinet, P.; Battelier, B.; Villing, A.; Moron, F.; Lours, M.; Bidel, Y.; et al. Detecting inertial effects with airborne matter-wave interferometry. Nat. Commun. 2011, 2, 474. [Google Scholar] [CrossRef] [PubMed]
- Rummel, R.; Balmino, G.; Johannessen, J.; Visser, P.N.A.M.; Woodworth, P. Dedicated gravity field missions—Principles and aims. J. Geodyn. 2002, 33, 3–20. [Google Scholar] [CrossRef]
- Kasevich, M.; Chu, S. Measurement of the gravitational acceleration of an atom with a light pulse atom interferometer. Appl. Phys. B 1992, 54, 321–332. [Google Scholar] [CrossRef]
- Stummer, C.; Fecher, T.; Pail, R. Alternative method for angular rate determination within the GOCE gradiometer processing. J. Geod. 2011, 85, 585–596. [Google Scholar] [CrossRef]
- Canuto, E.; Molano, A.; Massotti, L. Drag-free control of the GOCE satellite: Noise and observer design. IEEE Trans. Control Syst. Technol. 2010, 18, 501–509. [Google Scholar] [CrossRef]
- Sechi, G.; Buonocore, M.; Cometto, F.; Saponara, M.; Tramutola, A.; Vinai, B. In-ight results from the drag-free and attitude control of GOCE satellite. In Proceedings of the 18th International Federation of Automatic Control (IFAC) World Congress, Milano, Italy, 28 August–2 September 2011; pp. 733–740. [Google Scholar]
- Steiger, C.; Romanazzo, M.; Emanuelli, P.P.; Floberghagen, R. Flying at the edge-extremely low altitude operations for ESA’s drag-free gravity mission GOCE. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Willson, R.C.; Gulkis, S.; Janssen, M.; Hudson, H.S.; Chapamn, G.A. Observations of Solar irradiance variability. Science 1981, 211, 700–702. [Google Scholar] [CrossRef]
- Zoest, T.V.; Gaaloul, N.; Singh, Y. Bose-Einstein Condensation in Microgravity. Science 2010, 328, 1540–1543. [Google Scholar] [CrossRef]
- Landau, H.J. Sampling, data transmission, and the Nyquist rate. Proc. IEEE 1967, 55, 1701–1706. [Google Scholar] [CrossRef]
- ESA. The Four Candidate Earth Explorer Core Missions-Gravity Field and Steady-State Ocean Circulation Mission; ESA SP-1233(1); ESA Publications Division: Noordwijk, The Netherlands, 1999. [Google Scholar]
- Barrett, B.; Gominet, P.A.; Cantin, E.; Antoni-Micollier, L.; Landragin, A. Mobile and remote inertial sensing with atom interferometers. In Proceedings of the International School of Physics “Enrico Fermi”: Atom interferometry, Varena, Italy, 1–6 July 2013; pp. 493–555. [Google Scholar]
- Canuel, B.; Leduc, F.; Holleville, D.; Gauguet, A.; Fils, J.; Virdis, A.; Clairon, A.; Dimarcq, N.; Borde, J.; Bouyer, P.; et al. 6-axis inertial sensor using cold-atom interferometry. Phys. Rev Lett. 2006, 97, 010402. [Google Scholar] [CrossRef] [PubMed]
- Maleki, L.; Yu, N.; Kohel, J. Quantum gravity gradiometer for sub-surface imaging. In Proceedings of the Space 2004 Conference and Exhibit, AIAA, San Diego, CA, USA, 28–30 September 2004; p. 5906. [Google Scholar]
- Rudolph, J.; Herr, W.; Grzeschik, C.; Sternke, T.; Grote, A.; Popp, M.; Becker, D.; Müntinga, H.; Ahlers, H.; Peters, A.; et al. A high-flux BEC source for mobile atom interferometers. New J. Phys. 2015, 17, 065001. [Google Scholar] [CrossRef]
- Stedman, G.E.; Schreiber, K.U.; Bilger, H.R. On the detectability of the Lense-Thirring field from rotating laboratory masses using ring laser gyroscope interferometers. Cl. Quantum Grav. 2003, 20, 2527–2540. [Google Scholar] [CrossRef]
- Lan, S.Y.; Kuan, P.C.; Estey, B.; Haslinger, P.; Mller, H. Influence of the Coriolis Force in Atom Interferometry. Phys. Rev. Lett. 2012, 108, 090402. [Google Scholar] [CrossRef]
- Louchet-Chauvet, A.; Farah, T.; Bodart, Q.; Clairon, A.; Landragin, A.; Merlet, S. The influence of transverse motion within an atomic gravimeter. New J. Phys. 2011, 13, 065025. [Google Scholar] [CrossRef]
- Jennrich, O.; Heinzel, G. Laser Requirements for a Gravitational Wave Mission, Version 0.1. 2013. Available online: https://asd.gsfc.nasa.gov/Jordan.Camp/eLISA_laser_reqs.pdf (accessed on 7 February 2022).
- Coq, Y.; Retter, J.A.; Richard, S.; Aspect, A.; Bouyer, P. Coherent matter wave inertial sensors for precision measurements in space. Adv. Space Res. 2012, 49, 365–372. [Google Scholar] [CrossRef]
- Yu, N.; Kogel, J.M.; Romans, L.; Maleki, L. Quantum gravity gradiometer sensor for Earth science applications. In Proceedings of the NASA Earth Science and Technology Conference 2002, Pasadena, CA, USA, 11–13 July 2003; p. B3P5. [Google Scholar]
- Zhou, M.K.; Hu, Z.K.; Duan, X.C.; Sun, B.L.; Chen, L.L.; Zhang, Q.Z. Performance of a cold-atom gravimeter with an active vibration isolator. Phys. Rev. A. 2012, 86, 043630. [Google Scholar] [CrossRef]
- Cheinet, P.; Canuel, B.; Santos, F.P.D.; Gauguet, A.; Yver-Leduc, F.; Landragin, A. Measurement of the sensitivity function in time-domain atomic interferometer. IEEE Trans. Instrum. Meas. 2008, 57, 1141–1148. [Google Scholar] [CrossRef]
- Stern, G.; Battelier, B.; Geiger, R.; Varoquaux, G.; Villing, A.; Moron, F.; Carraz, O.; Zahzam, N.; Bidel, Y.; Chaibi, W.; et al. Light-pulse atom interferometry in microgravity. Eur. Phys. J. D 2008, 53, 353–357. [Google Scholar] [CrossRef]
- Duan, X.C. Principle Experiment of Measuring Gravity Gradient by Atom Interferometry. Master’s Dissertation, Huazhong University of Science and Technology, Wuhan, China, 2011. [Google Scholar]
- D’Amico, G.; Rosi, G.; Zhan, S.; Cacciapuoti, L.; Fattori, M.; Tino, G.M. Canceling the Gravity Gradient Phase Shift in Atom Interferometry. Phys. Rev. Lett. 2017, 119, 253201. [Google Scholar] [CrossRef] [PubMed]
- McGuinness, H.J.; Rakholia, A.V.; Biedermann, G.W. High data-rate atom interferometer for measuring acceleration. Appl. Phys. Lett. 2012, 100, 011106. [Google Scholar] [CrossRef]
- Pail, R.; Bruinsma, S.; Migliaccio, F.; Förste, C.; Goiginger, H.; Schuh, W.D. First GOCE gravity field models derived by three different approaches. J. Geod. 2011, 85, 819–843. [Google Scholar] [CrossRef]
- Pail, R.; Goiginger, H.; Schuh, W.; Höck, E.; Brockmann, J.M.; Fecher, T.; Mayrhofer, R.; Krasbutter, I.; Mayer-Gürr, T. GOCE-only gravity field model derived from 8 months of GOCE data. In Proceedings of the 4th International GOCE User Workshop, Munich, Germany, 31 March–1 April 2011; p. SP-696. [Google Scholar]
- Brockmann, J.M.; Zehentner, N.; Höck, E.; Pail, R.; Loth, I.; Mayer-Gurr, T.; Schuh, W.-D. EGM_TIM_RL05: An independent geoid with centimeter accuracy purely based on the GOCE mission. Geophys. Res. Lett. 2014, 41, 8089–8099. [Google Scholar] [CrossRef]
- Cai, L.; Zhou, Z.; Xu, H.; Gao, F.; Zhu, Z.; Luo, J. Analytical error analysis for satellite gravity field determination based on two-dimensional Fourier method. J. Geod. 2013, 87, 417–426. [Google Scholar] [CrossRef][Green Version]
- Rakholia, A.; Sugarbaker, A.; Black, A.; Kasevich, M.; Saif, B.; Luthcke, S.; Callahan, L.; Seery, B.D.; Lee, F.; Mather, J.C.; et al. Development of an atom interferometer gravity gradiometer for earth sciences. In Proceedings of the 48th Annual Meeting of the APS Division of Atomic, Molecular and Optical Physics, Sacramento, CA, USA, 5–9 June 2017; Volume 62, p. K1.00010. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Source | Noise Contribution |
|---|---|
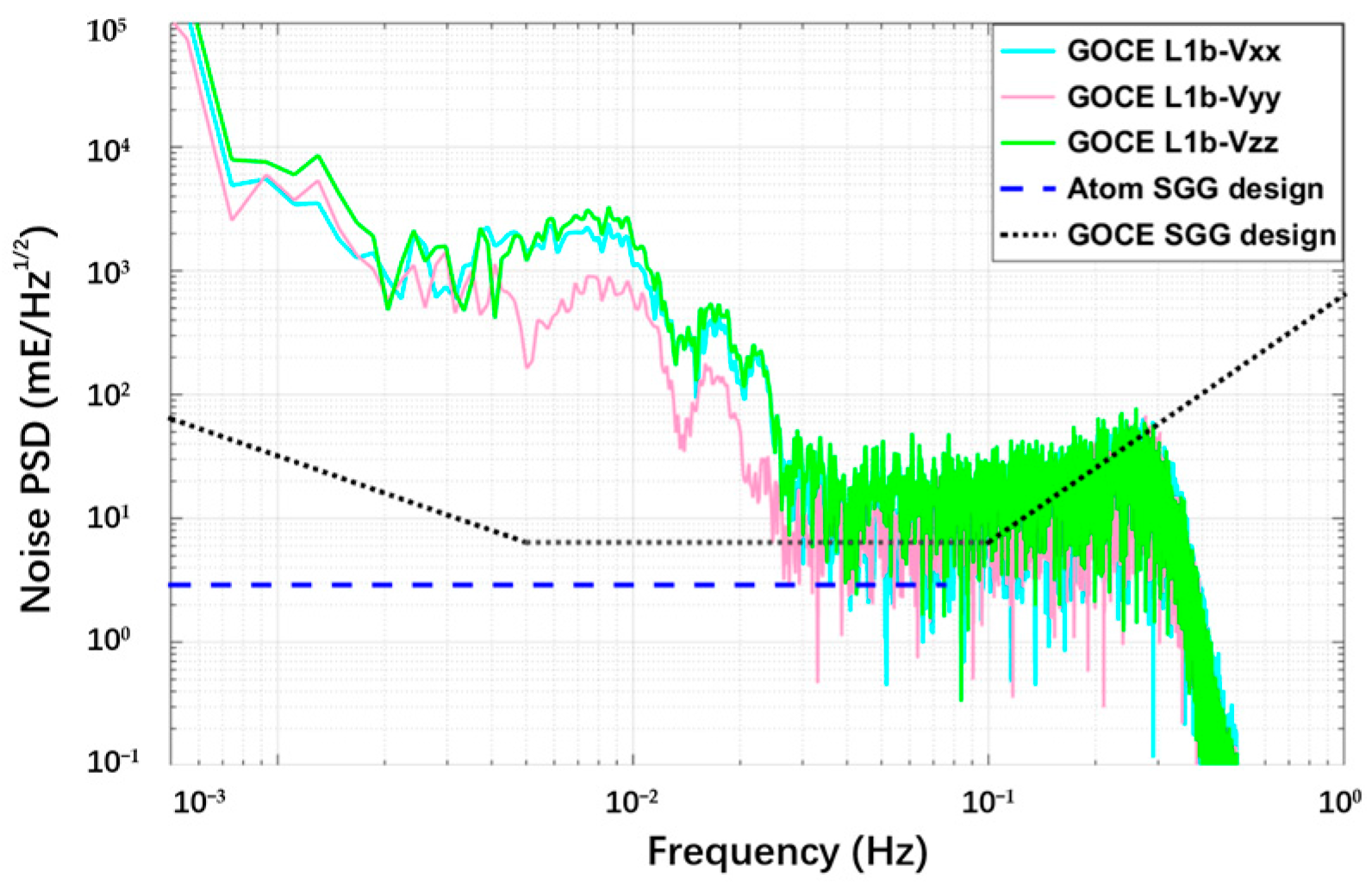
| Differential acceleration measurement | 1.2 mE/Hz1/2 |
| Centrifugal acceleration | 0.5 mE/Hz1/2 |
| Coriolis acceleration | 1.2 mE/Hz1/2 |
| External disturbances | 0.7 mE/Hz1/2 |
| Total | 1.9 mE/Hz1/2 |
| Source | Measuring Characteristics and Requirements |
|---|---|
| Orbit | Mean altitude: 229 km Eccentricity: 0.001 Inclination: 96.5° Measurement duration: ≥6 months Satellite operating mode: drag-free mode Suggested launch time: May 2029~May 2031 |
| Satellite attitude | Attitude pointing mode: Earth-pointing Angular velocity: ωy ≈ 1.17 × 10−3 rad/s, ωx ≈ ωz ≈ 6 × 10−5 rad/s |
| Different acceleration measurement | Measurement bandwidth: 0~75 mHz Interrogation time T: 2.8 s BEC atoms preparation: 105 atoms at 1 Hz rate Sampling rate: 0.15 Hz Baseline separation: 50 cm Ultimate sensitivity: 4 × 10−13 m/s2/Hz1/2 |
| Recovery of satellite angular effects | Gyro resolution: 2.2 × 10−10 rad/s/Hz1/2 Coriolis compensation factor: abefore/aafter = 60 Relative velocity disturbance requirement: 10 nm/s/Hz1/2 Laser intensity difference requirement: 5 × 10−6/Hz1/2 |
| External disturbances | Vibration suppression: 140~155 dB Magnetic field B: 0.3 mG Magnetic fluctuation δB: B/100 |
| GOCE Gradiometry | Atom-Interferometry Gradiometry | |
|---|---|---|
| Operational principle | Electrostatic servo-control (Newtonian mechanics) | Atom interferometry (Quantum mechanics) |
| Test mass | PtRh10 | 87Rb atoms |
| Gradient components to be measured | Diagonal components Vxx, Vyy, Vzz Non-diagonal components Vxz, Vyz, Vxy | Diagonal components Vxx, Vyy, Vzz |
| Data Length | Data Source | Maximum Degree and Order | Cumulative Geoid Height Errors | Cumulative Gravity Anomaly Errors |
|---|---|---|---|---|
| 71 days | GOCE | 224 | 10 cm@100 km | 3 mGal@100 km |
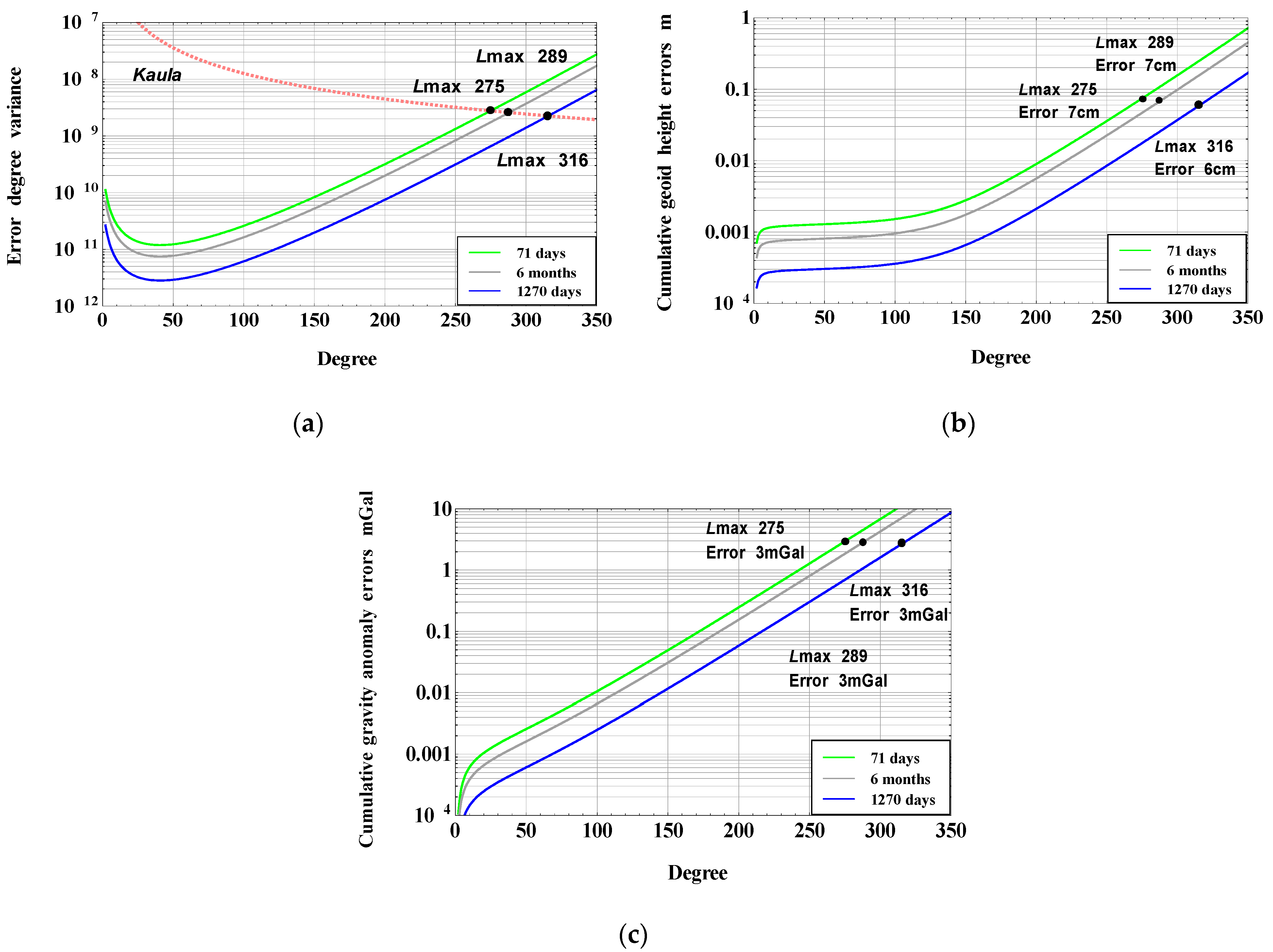
| 71 days | Atom SGG | 275 | 0.9 cm@100 km 3.5 cm@80 km | 0.24 mGal@100 km 1.2 mGal@80 km |
| 6 months | GOCE | 250 | 6 cm@100 km 10 cm@80 km | 1.8 mGal@100 km 3.4 mGal@80 km |
| 6 months | Atom SGG | 289 | 0.55 cm@100 km 2.1 cm@80 km | 0.16 mGal@100 km 0.8 mGal@80 km |
| 1270 days | GOCE | 280 | 2.4 cm@100 km 10 cm@80 km | 0.7 mGal@100 km 3.37 mGal@80 km |
| 1270 days | Atom SGG | 316 | 0.2 cm@100 km 0.85 cm@80 km | 0.06 mGal@100 km 0.3 mGal@80 km |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Liao, H.; Tu, H.; Duan, X.; Zhao, Y. Spaceborne Atom-Interferometry Gravity Gradiometry Design towards Future Satellite Gradiometric Missions. Aerospace 2022, 9, 253. https://doi.org/10.3390/aerospace9050253
Zhu Z, Liao H, Tu H, Duan X, Zhao Y. Spaceborne Atom-Interferometry Gravity Gradiometry Design towards Future Satellite Gradiometric Missions. Aerospace. 2022; 9(5):253. https://doi.org/10.3390/aerospace9050253
Chicago/Turabian StyleZhu, Zhu, He Liao, Haibo Tu, Xiaochun Duan, and Yanbin Zhao. 2022. "Spaceborne Atom-Interferometry Gravity Gradiometry Design towards Future Satellite Gradiometric Missions" Aerospace 9, no. 5: 253. https://doi.org/10.3390/aerospace9050253
APA StyleZhu, Z., Liao, H., Tu, H., Duan, X., & Zhao, Y. (2022). Spaceborne Atom-Interferometry Gravity Gradiometry Design towards Future Satellite Gradiometric Missions. Aerospace, 9(5), 253. https://doi.org/10.3390/aerospace9050253