
Systematic Reliability-Based Multidisciplinary Optimization by Parallel Adaptive Importance Candidate Region




Abstract
:1. Introduction
2. Proposed Methods
2.1. Kriging Model
2.2. Learning Functions in Active Learning Method
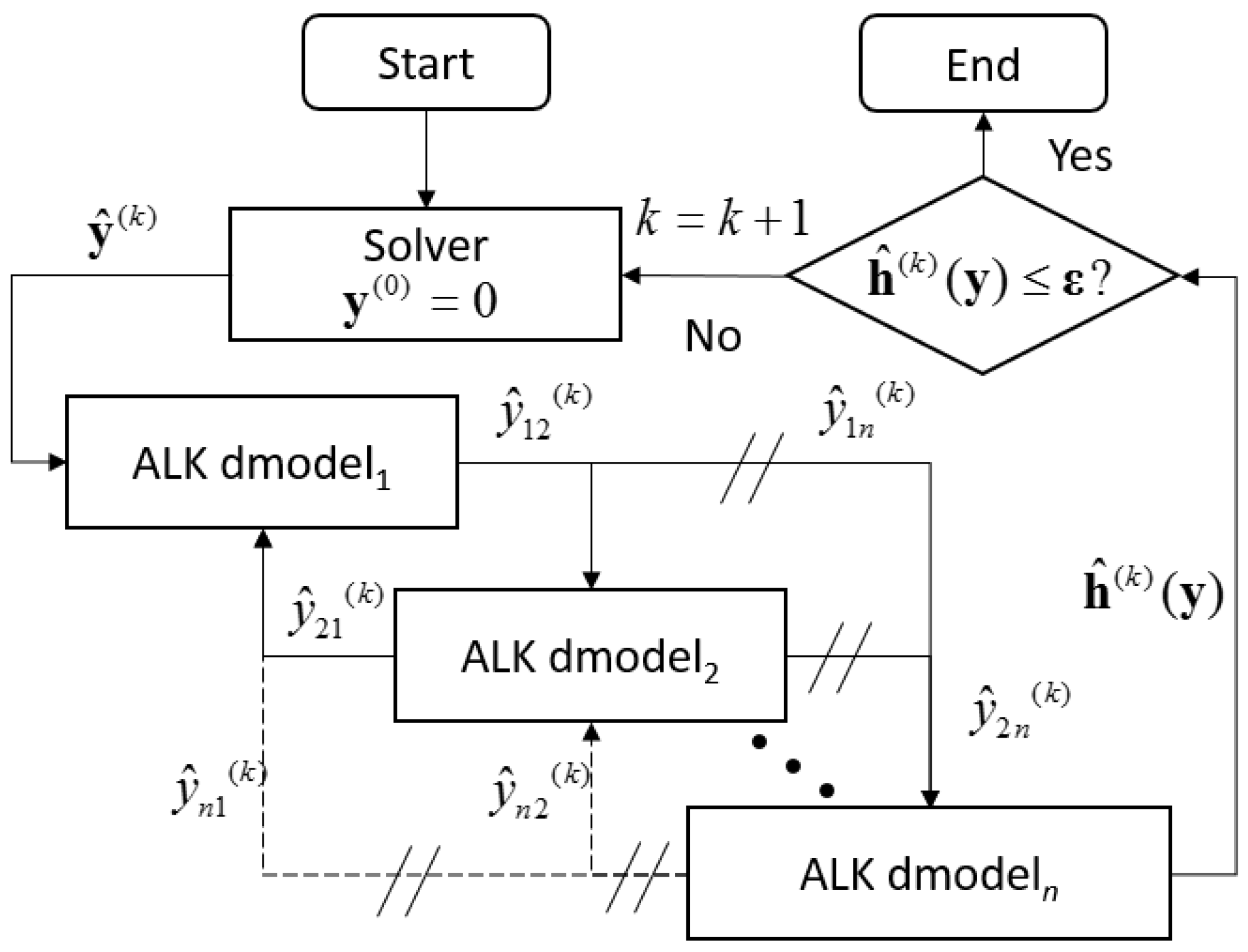
2.3. Coupling Methods for MDO
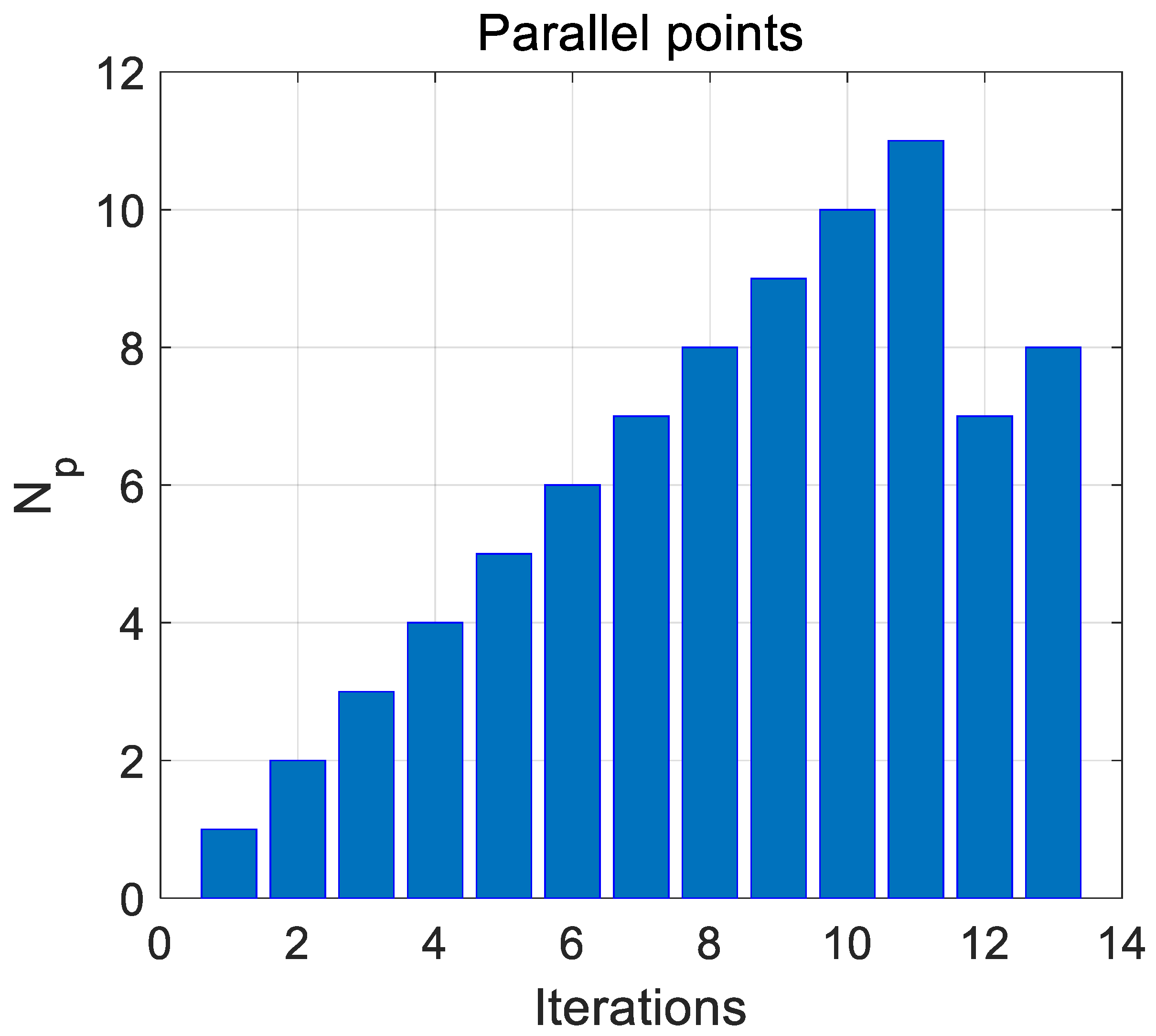
2.4. Parallel Adaptive Importance Candidate Region (PAIC)
- Step (1)
- Build initial ALK for optimization. Use initial smaller size of samples and build ALK for optimization (Optmodeli) with additional p samples to find estimated optimum d(0) by updating LF, where i is the number of OBFs.
- Step (2)
- Find MPPs by ALK. Compute reliability index β by transferring the random parameters to the standard normal distribution. Generate a point set in size j within β, and build ALK for reliability (Relmodelj). The updating by learning function of Relmodelj is used for searching the minimum LSFs of points Gj(xβ). It should be noted that the rough MPP candidate points xβ with lower accuracy are based on IS.
- Step (3)
- Update the initial design by reliability requirements. Add new points xadd for IS(x*, σ*) in parallel to train the Relmodelj with higher accuracy based on formular Equation (24) (j is the number of OBFs and LSFs). The accuracy is related to .
- Step (4)
- Estimated optimum searching under estimated probabilistic constraints. Set initial convergence ε(0) is 1000. Search the optimum by the ALK optimization. The MPP search is based on existing Relmodelj without calling LSF.
- Step (5)
- Judge the real reliability. Search MPP at the estimated optimum based on step (2) and use IS method to calculate the reliability. However, if Gj(xβ) > 0, ALK is unnecessary; otherwise, LF method is used to train points to update the Relmodelj.
- Step (6)
- Use IS to calculate the reliability requirements. If Gj(xβ) < 0, calculate the reliability with IS by ALK. If Gj(xβ) is still below zero, return to step (4), and if all G(xβ) > 0, reliability meets the requirement and optimization convergence is also achieved, then, dopt = d(k) (Equation (29)) and end.
3. Analysis and Results
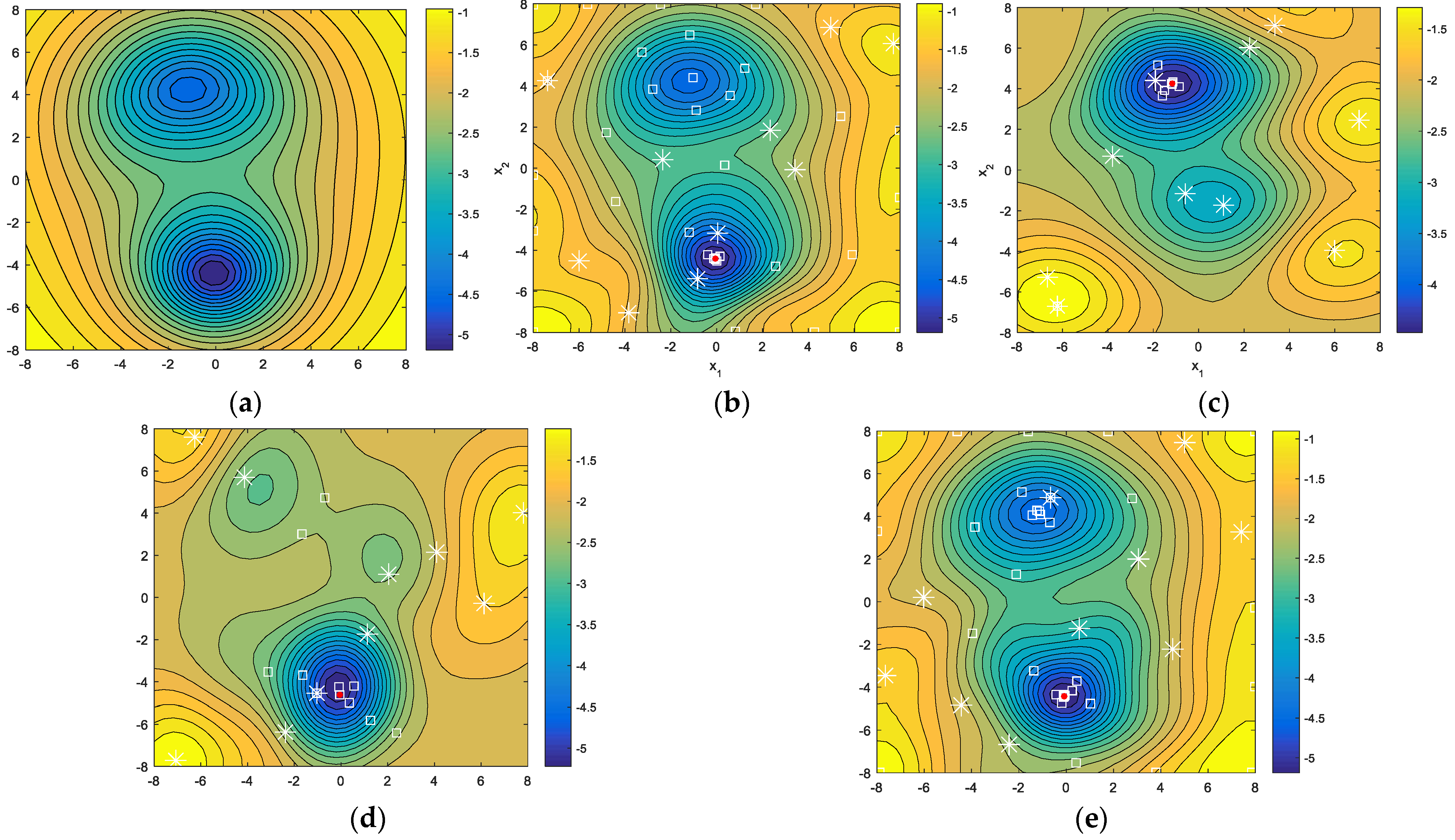
3.1. Optimization of Double-Peak Function
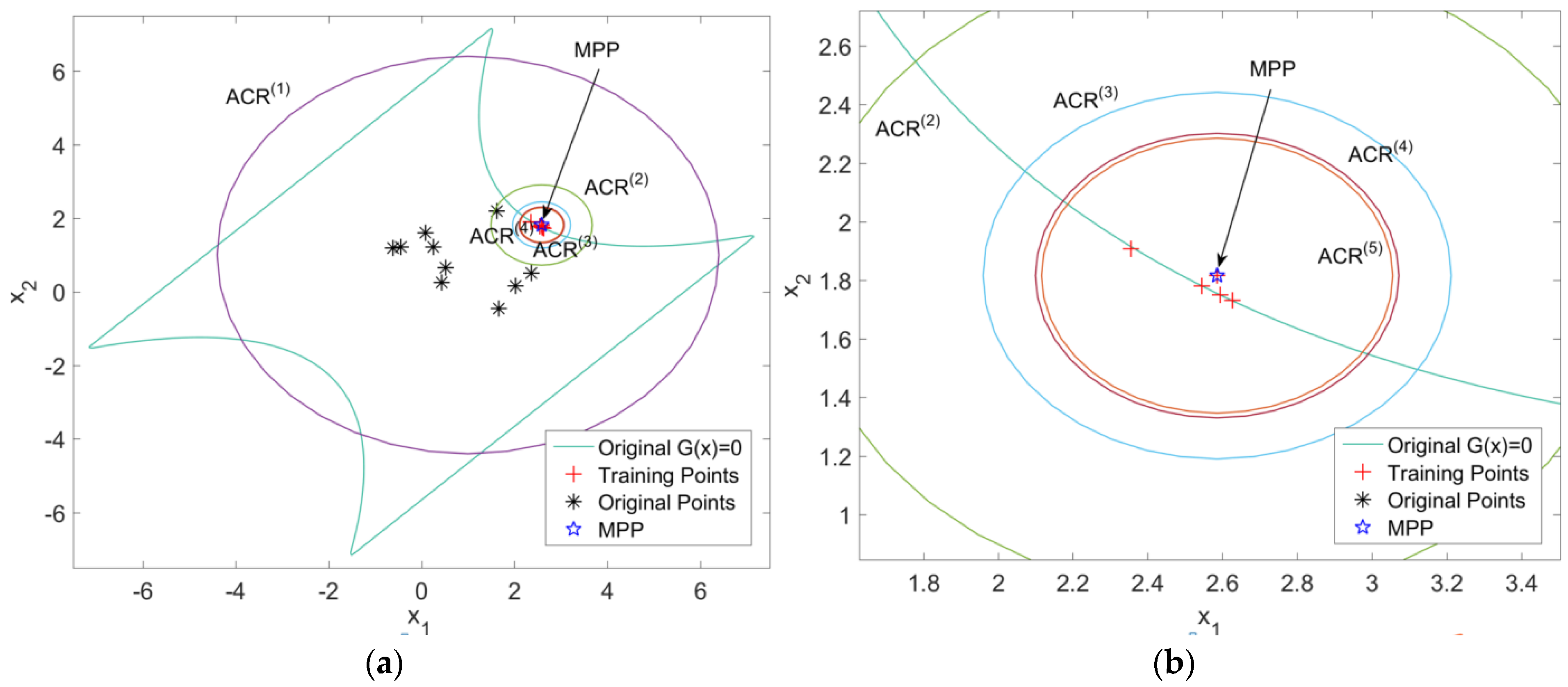
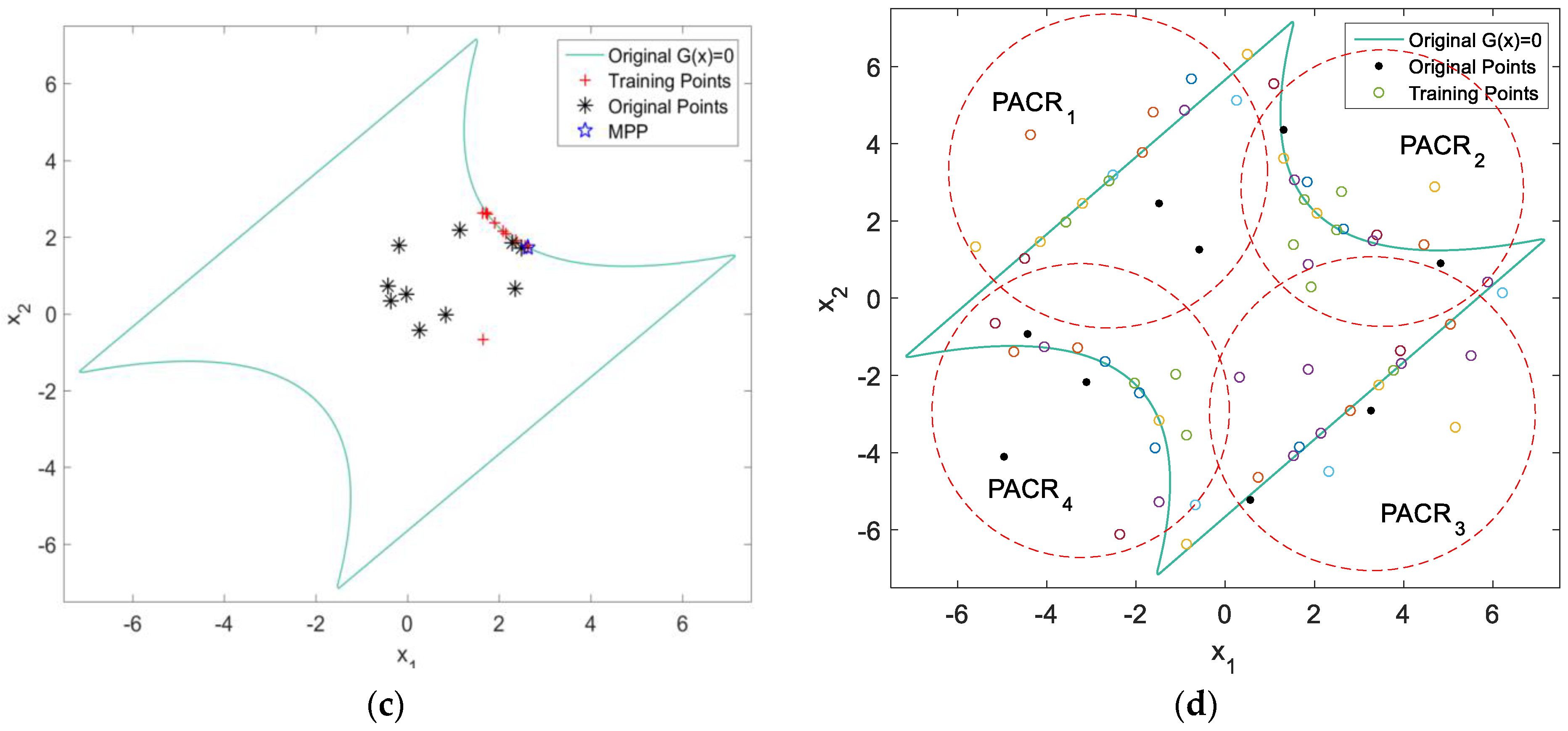
3.2. Multi-Failure Systems with Four Branches
3.3. RBMDO with Three Modes in Failure
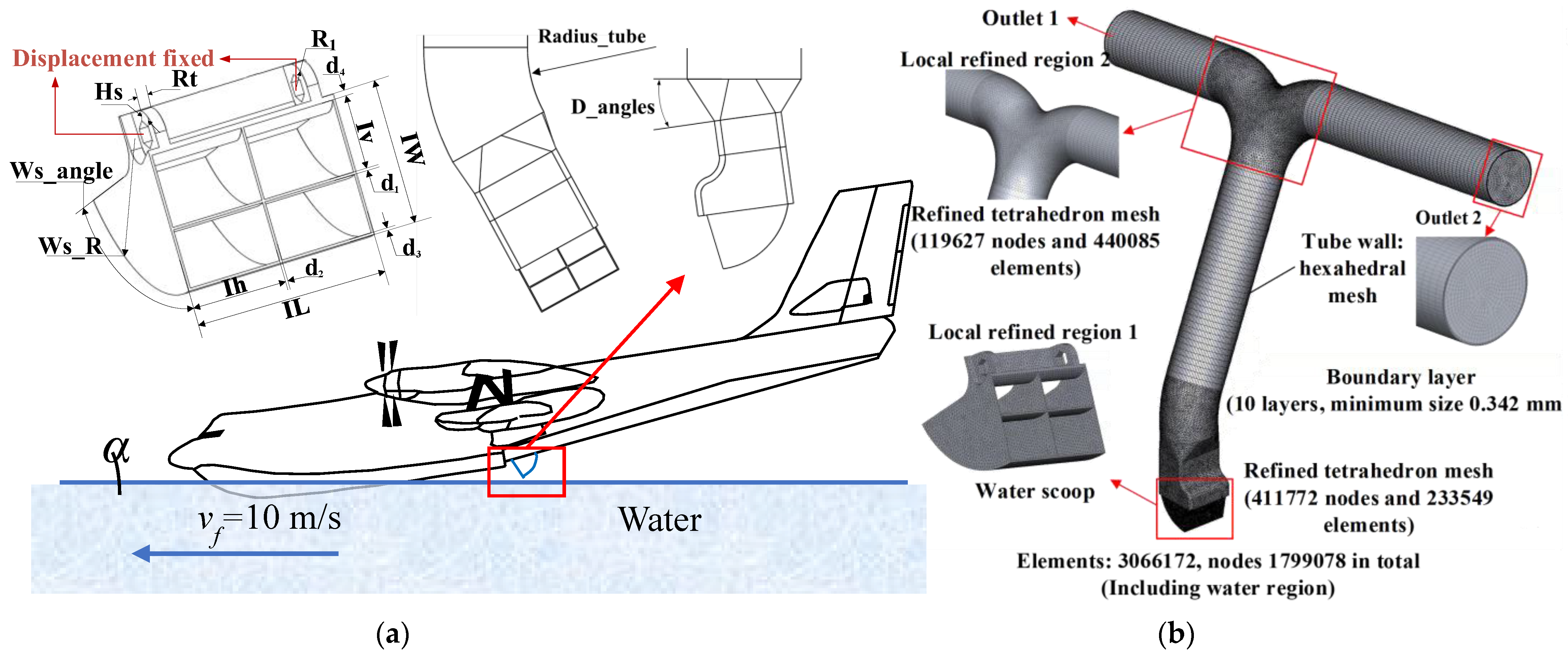
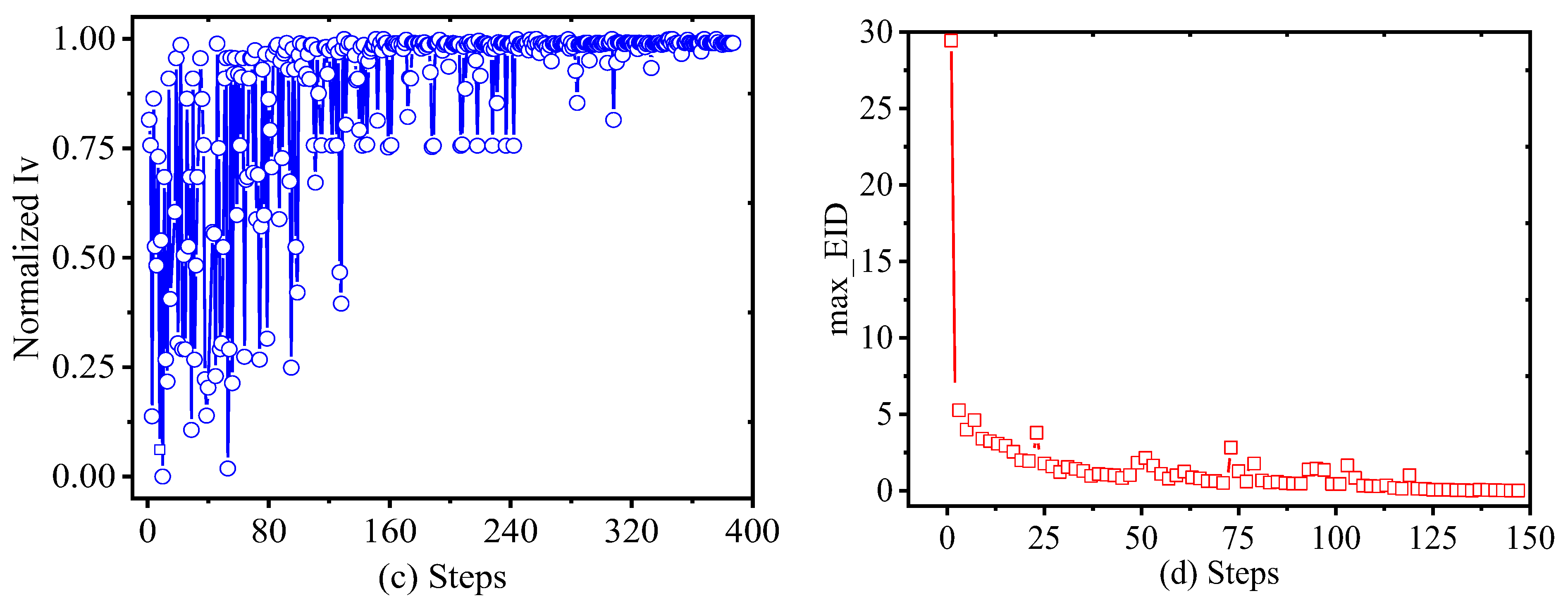
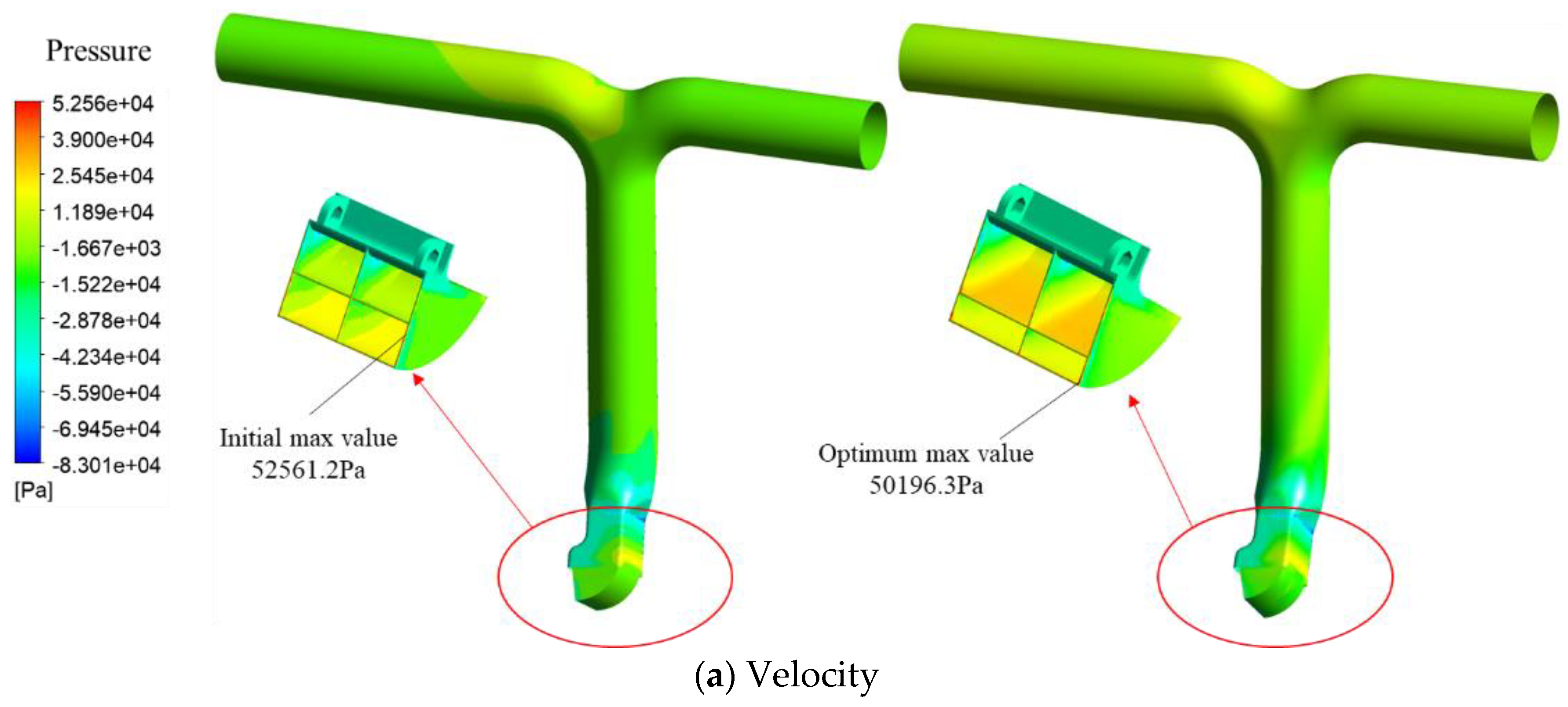
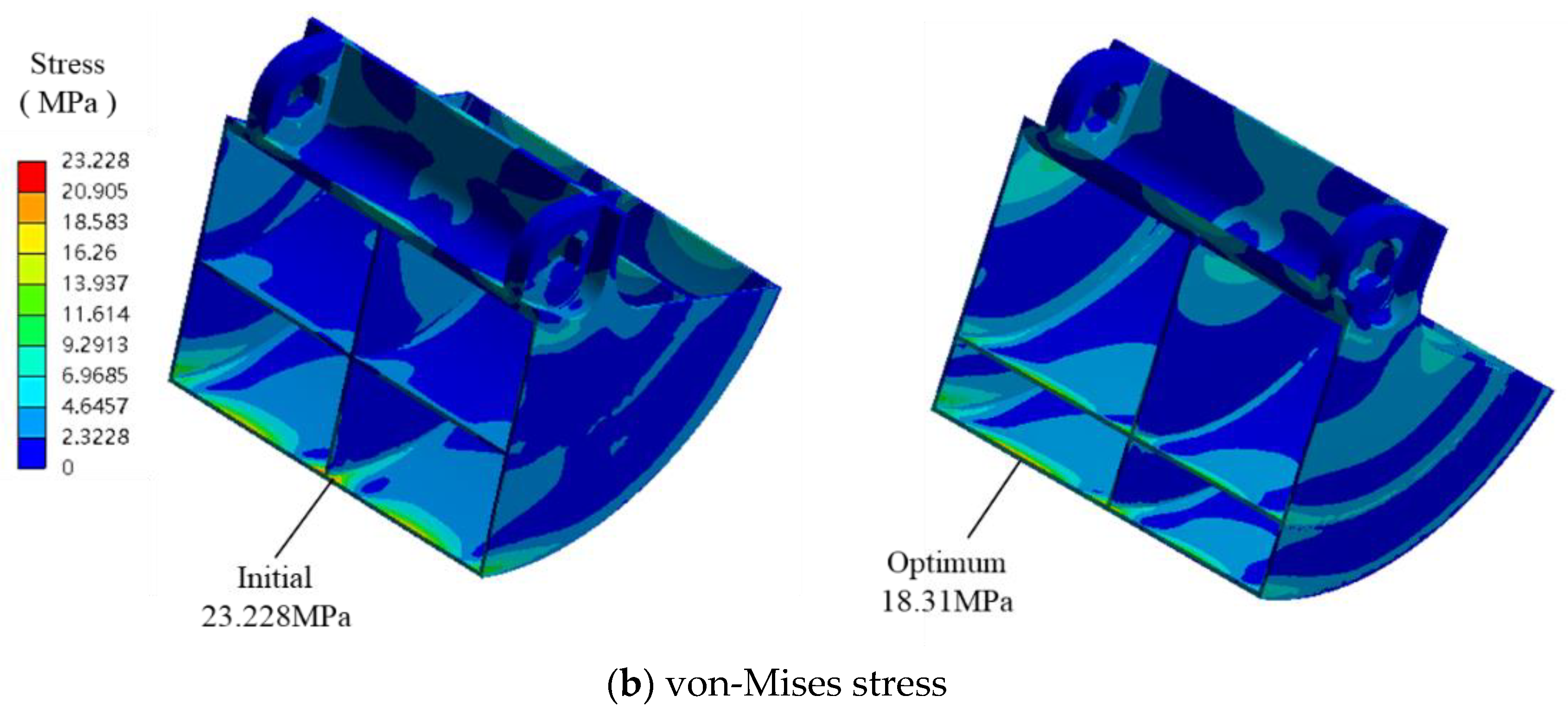
3.4. MDO of a Water-Scooping System in Amphibious Aircraft
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leimeister, M.; Kolios, A. Reliability-based design optimization of a spar-type floating offshore wind turbine support structure. Reliab. Eng. Syst. Saf. 2021, 213, 107666. [Google Scholar] [CrossRef]
- Echard, B.; Gayton, N.; Lemaire, M. AK-MCS: An active learning reliability method combining Kriging and Monte Carlo Simulation. Struct. Saf. 2011, 33, 145–154. [Google Scholar] [CrossRef]
- Roshanian, J.; Ebrahimi, M. Latin hypercube sampling applied to reliability-based multidisciplinary design optimization of a launch vehicle. Aerosp. Sci. Technol. 2013, 28, 297–304. [Google Scholar] [CrossRef]
- Ni, P.; Li, J.; Hao, H.; Yan, W.; Du, X.; Zhou, H. Reliability analysis and design optimization of nonlinear structures. Reliab. Eng. Syst. Saf. 2020, 198, 106860. [Google Scholar] [CrossRef]
- Yang, X.; Mi, C.; Deng, D.; Liu, Y. A system reliability analysis method combining active learning Kriging model with adaptive size of candidate points. Struct. Multidiscip. Optim. 2019, 60, 137–150. [Google Scholar] [CrossRef]
- Zhou, Y.; Lu, Z. An enhanced Kriging surrogate modeling technique for high-dimensional problems. Mech. Syst. Signal Process. 2020, 140, 106687. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, Z.; Cheng, K. AK-DS: An adaptive Kriging-based directional sampling method for reliability analysis. Mech. Syst. Signal Process. 2021, 156, 107610. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Bichon, B.J.; Eldred, M.S.; Swiler, L.P.; Mahadevan, S.; McFarland, J.M. Efficient Global Reliability Analysis for Nonlinear Implicit Performance Functions. AIAA J. 2008, 46, 2459–2468. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Gao, Y.; Zhang, Y.; Gao, Z. An active learning kriging model for hybrid reliability analysis with both random and interval variables. Struct. Multidiscip. Optim. 2014, 51, 1003–1016. [Google Scholar] [CrossRef]
- Meng, Z.; Zhang, D.; Li, G.; Yu, B. An importance learning method for non-probabilistic reliability analysis and optimization. Struct. Multidiscip. Optim. 2019, 59, 1255–1271. [Google Scholar] [CrossRef]
- Song, J.; Wei, P.; Valdebenito, M.A.; Faes, M.; Beer, M. Data-driven and active learning of variance-based sensitivity indices with Bayesian probabilistic integration. Mech. Syst. Signal Process. 2021, 163, 108106. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, L.; Sørensen, J.D. REIF: A novel active-learning function toward adaptive Kriging surrogate models for structural reliability analysis. Reliab. Eng. Syst. Saf. 2019, 185, 440–454. [Google Scholar] [CrossRef]
- Zhang, M.; Yao, Q.; Sun, S.; Li, L.; Hou, X. An efficient strategy for reliability-based multidisciplinary design optimization of twin-web disk with non-probabilistic model. Appl. Math. Model. 2020, 82, 546–572. [Google Scholar] [CrossRef]
- Viana, F.; Haftka, R.T.; Steffen, V. Multiple surrogates: How cross-validation errors can help us to obtain the best predictor. Struct. Multidiscip. Optim. 2009, 39, 439–457. [Google Scholar] [CrossRef]
- Wen, Z.; Pei, H.; Liu, H.; Yue, Z. A Sequential Kriging reliability analysis method with characteristics of adaptive sampling regions and parallelizability. Reliab. Eng. Syst. Saf. 2016, 153, 170–179. [Google Scholar] [CrossRef]
- Yun, W.; Lu, Z.; He, P.; Dai, Y.; Feng, K. Adaptive subdomain sampling and its adaptive Kriging–based method for reliability and reliability sensitivity analyses. Struct. Multidiscip. Optim. 2020, 61, 1107–1121. [Google Scholar] [CrossRef]
- Sóbester, A.; Leary, S.J.; Keane, A.J. A parallel updating scheme for approximating and optimizing high fidelity computer simulations. Struct. Multidiscip. Optim. 2004, 27, 371–383. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, P. A double-loop adaptive sampling approach for sensitivity-free dynamic reliability analysis. Reliab. Eng. Syst. Saf. 2015, 142, 346–356. [Google Scholar] [CrossRef]
- Meng, Z.; Keshtegar, B. Adaptive conjugate single-loop method for efficient reliability-based design and topology optimization. Comput. Methods Appl. Mech. Eng. 2019, 344, 95–119. [Google Scholar] [CrossRef]
- Meng, D.; Li, Y.-F.; Huang, H.-Z.; Wang, Z.; Liu, Y. Reliability-based multidisciplinary design optimization using subset simulation analysis and its application in the hydraulic transmission mechanism design. J. Mech. Des. 2015, 137, 051402. [Google Scholar] [CrossRef]
- Fei, C.-W.; Li, H.; Liu, H.-T.; Lu, C.; Keshtegar, B.; An, L.-Q. Multilevel nested reliability-based design optimization with hybrid intelligent regression for operating assembly relationship. Aerosp. Sci. Technol. 2020, 103, 105906. [Google Scholar] [CrossRef]
- Wang, L.; Xiong, C.; Hu, J.; Wang, X.; Qiu, Z. Sequential multidisciplinary design optimization and reliability analysis under interval uncertainty. Aerosp. Sci. Technol. 2018, 80, 508–519. [Google Scholar] [CrossRef]
- Song, L.-K.; Bai, G.-C.; Li, X.-Q. A novel metamodeling approach for probabilistic LCF estimation of turbine disk. Eng. Fail. Anal. 2021, 120, 105074. [Google Scholar] [CrossRef]
- Melchers, R.; Ahammed, M. A fast approximate method for parameter sensitivity estimation in Monte Carlo structural reliability. Comput. Struct. 2004, 82, 55–61. [Google Scholar] [CrossRef]
- Zhang, M.; Yao, Q.; Sheng, Z.; Hou, X. A sequential reliability assessment and optimization strategy for multidisciplinary problems with active learning kriging model. Struct. Multidiscip. Optim. 2020, 62, 2975–2994. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Avg. N | Avg. Nadd | Avg. Iter | Avg. Np | Avg. Pf | Avg. |εf| |
|---|---|---|---|---|---|---|
| MCS | 1.0 × 109 | / | / | / | 1.218 × 10−5 | / |
| 1.0 × 107 | / | / | / | 1.220 × 10−5 | 1.642 × 10−3 | |
| EGRA | 116.25 | 106.25 | 116.25 | / | 1.275 × 10−5 | 4.680 × 10−2 |
| K-MCS (nMC = 1.0 × 107) | 765.12 | 755.12 | 755.12 | / | 1.240 × 10−5 | 1.806 × 10−2 |
| ALK-MCS (nMC = 1.0 × 107) | 116.25 | 106.25 | 116.25 | / | 1.176 × 10−5 | 3.448 × 10−2 |
| ISKRA (K-m × 10 ans) | 115.8 | 105.8 | 17.63 | 6 | 1.170 × 10−5 | 3.941 × 10−2 |
| ALK-PAIC (nMC = 1.0 × 107) | 86.47 | 76.42 | 11.65 | 6.56 | 1.192 × 10−5 | 2.135 × 10−2 |
| ALK-PAIC (nMC = 1.0 × 105) | 86.47 | 76.42 | 11.65 | 6.56 | 1.165 × 10−5 | 4.351 × 10−2 |
| ALK-PAIC (IS) | 86.47 | 76.42 | 11.65 | 6.56 | 1.158 × 10−5 | 4.926 × 10−2 |
| ALK Methods | NOBF n + (m) | Avg. NLSF n + (m) | Step Length ds | Avg. Iter. | ε | Optimal Value | Optimal Points | |
|---|---|---|---|---|---|---|---|---|
| x1 | x2 | |||||||
| ERF-PAIC | 10 + (10) | 20 + (35.12) | 0.5 | 15.15 | 10−5 | 1.3746 | 4.2613 | 2.8257 |
| ERF-PAIC | 10 + (10) | 20 + (39.65) | 0.5 | 20.94 | 10−8 | 1.3749 | 4.2592 | 2.8281 |
| ERF-PAIC | 10 + (10) | 20 + (26.23) | 1.2 | 10.50 | 10−5 | 1.3748 | 4.2608 | 2.8261 |
| ERF-AIC | 10 + (10) | 20 + (27.45) | 1.2 | 67.45 | 10−5 | 1.3751 | 4.2617 | 2.8251 |
| ERF | 10 + (10) | 20 + (39.10) | 1.2 | 79.10 | 10−5 | 1.3752 | 4.2618 | 2.8249 |
| / | 151 | 151 × 106 | / | / | / | 1.3750 | 4.2615 | 2.8225 |
| Type | Symbol | Description | Unit | Lower Limits | Initial Value | Upper Limits |
|---|---|---|---|---|---|---|
| Parameters P (normal distribution, σ = 0.5%) | Ws_R | Radius of scoop | mm | / | 260 | / |
| R1 | Radius of scoop rotary shaft ribs | mm | / | 20 | / | |
| IW | Inlet height of water scoop | mm | / | 116.8 | / | |
| IL | Length of scoop | mm | / | 166 | / | |
| Rt | Thickness of scoop rotary shaft ribs | mm | / | 10 | / | |
| Hs | Length of the side of hexagon | mm | / | 11.5 | / | |
| d1 | Thickness of horizontal baffle | mm | / | 2 | / | |
| d2 | Thickness of vertical baffle | mm | / | 2 | / | |
| d3 | Thickness of lower border | mm | / | 2 | / | |
| d4 | Thickness of the upper border | mm | / | 2 | / | |
| Design variables d | Radius_tube | Radius of tube bend | mm | 225 | 250 | 275 |
| Iv | Distance from the horizontal baffle to the upper border of scoop | mm | 54.4 | 68 | 81.6 | |
| Ih | Distance from the vertical baffle to the left border of scoop | mm | 64 | 80 | 96 | |
| D_angles | Included angle between section of scooping bucket and tube | ° | −8.547 | −7.77 | −6.216 | |
| Ws_angle | Included angle between inlet and outlet of scoop | ° | 72.9 | 81 | 89.1 | |
| Objectives | m* | Mass flow difference between two outlets | kg/s | / | / | / |
| σmax | Max Mises stress in water scooping | MPa | / | / | / |
| Initial | GA with Direct FEM | RBF-AIC with EGO | Kriging with EGO | Parallel ALK-AIC with EGO | |||||
|---|---|---|---|---|---|---|---|---|---|
| Value | CR (%) | Value | Error (%) | Value | Error (%) | Value | Error (%) | ||
| Radius_tube (mm) | 250 | 225.81 | ↓9.676 | 226.51 | 0.310 | 227.91 | 0.930 | 227.25 | 0.638 |
| Iv (mm) | 68 | 81.328 | ↑19.600 | 81.131 | −0.242 | 81.421 | 0.114 | 81.187 | −0.173 |
| Ih (mm) | 80 | 85.675 | ↑7.094 | 85.761 | 0.100 | 85.733 | 0.068 | 87.576 | 2.219 |
| D_angles (°) | 81 | 74.25 | ↓8.333 | 74.280 | 0.040 | 74.288 | 0.051 | 74.058 | −0.259 |
| Ws_angle (°) | −7.77 | −6.802 | ↓12.458 | −6.945 | 2.102 | −6.928 | 1.852 | −6.8 | −0.029 |
| m* (kg/h) | 70.018 | 12.491 | ↓82.160 | 15.91 | 11.360 | 15.668 | 9.423 | 11.564 | −7.421 |
| Max_stress (MPa) | 23.228 | 17.75 | ↓23.584 | 16.493 | −7.082 | 15.073 | −15.082 | 18.31 | 3.155 |
| Number of iterations | / | 401 (401 samples) | 185 (195 samples) | 374 (384 samples) | 148 (190 samples) | ||||
| Max_EID | / | / | 0.0091 | 0.0100 | 0.0097 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Xia, S.; Li, X.; Yao, Q.; Xu, Y.; Yin, Z. Systematic Reliability-Based Multidisciplinary Optimization by Parallel Adaptive Importance Candidate Region. Aerospace 2022, 9, 240. https://doi.org/10.3390/aerospace9050240
Zhang M, Xia S, Li X, Yao Q, Xu Y, Yin Z. Systematic Reliability-Based Multidisciplinary Optimization by Parallel Adaptive Importance Candidate Region. Aerospace. 2022; 9(5):240. https://doi.org/10.3390/aerospace9050240
Chicago/Turabian StyleZhang, Mengchuang, Shasha Xia, Xiaochuan Li, Qin Yao, Yang Xu, and Zhiping Yin. 2022. "Systematic Reliability-Based Multidisciplinary Optimization by Parallel Adaptive Importance Candidate Region" Aerospace 9, no. 5: 240. https://doi.org/10.3390/aerospace9050240
APA StyleZhang, M., Xia, S., Li, X., Yao, Q., Xu, Y., & Yin, Z. (2022). Systematic Reliability-Based Multidisciplinary Optimization by Parallel Adaptive Importance Candidate Region. Aerospace, 9(5), 240. https://doi.org/10.3390/aerospace9050240