
A Novel Method for Inverse Kinematics Solutions of Space Modular Self-Reconfigurable Satellites with Self-Collision Avoidance

 , ,
, ,
Abstract
:1. Introduction
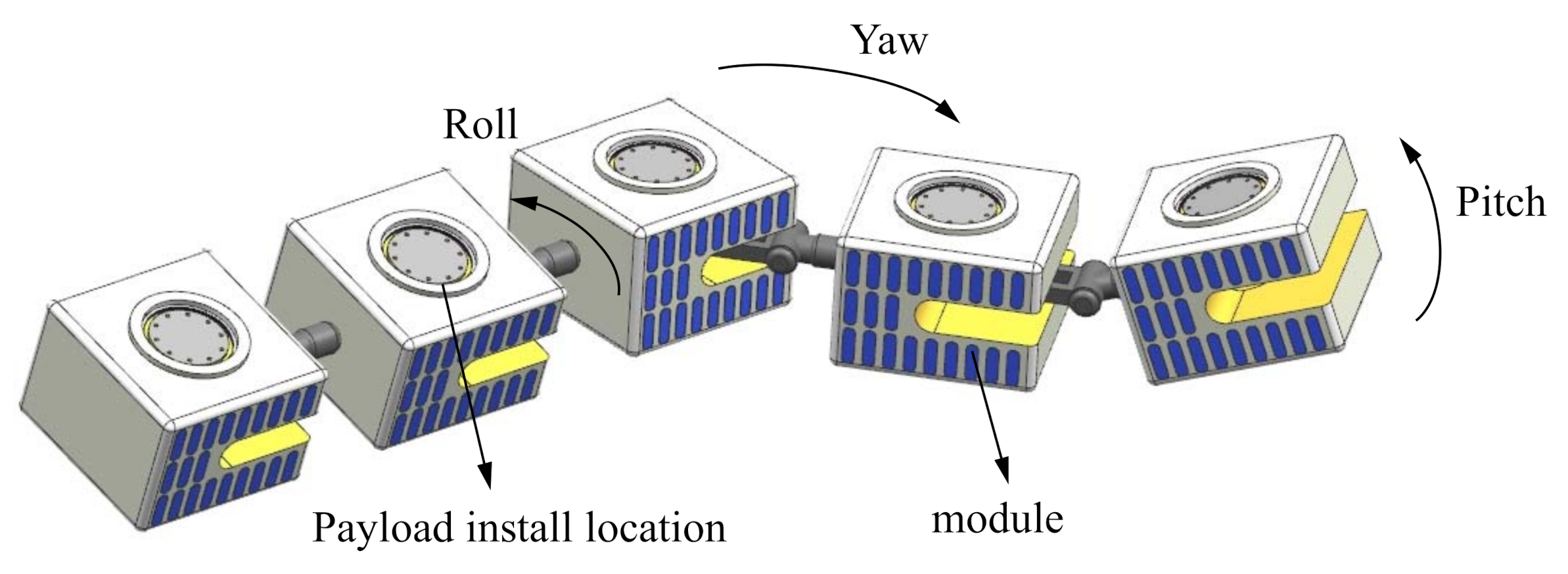
2. Kinematics Modeling of SMSRS
Forward Kinematiccs of SMSRS
3. The Objective Function for Solving Inverse Kinematics of SMSRS
3.1. Pose Error of Single Module
3.2. Pose Error of Multi-Modules
- (1)
- When two adjacent modules are on the same side of : taking the link on a side as an example, their homogeneous transformation matrices relative to are:
- (2)
- When the two adjacent links are located on different sides of , they are link of SMSRS, and their homogeneous transformation matrices relative to are:
3.3. Self-Collision Avoidance
3.4. Objective Function
3.5. How to Solve the Inverse Kinematic Problem
- (1)
- Initialization. Every individual is initialized randomly according to:
- (2)
- Fitness calculation. For every , we compute its forward kinematics using Equations (1)–(3) to obtain , and then calculate the estimated relative homogeneous transformation matrices between two adjacent modules of m task modules by Equations (12) and (15). We use these estimated relative homogeneous matrices that contain estimated relative position and attitude to compute the fitness value in Equation (19).
- (3)
- Stop criteria. The optimization algorithm stops when it achieves the maximum iterations, or the fitness value reaches a value of tolerance.
4. Segmented Hybrid PSO and CMA-ES Algorithm
4.1. PSO Framework
4.2. CMA-ES Framework
- (1)
- Sampling operation: firstly, the CMAES algorithm selects a solution in the solution space at random, which is used as a centroid to generate the population using a normal distribution. As shown in:
- (2)
- Selection and reorganization operation: this operation selects a part of the optimal solution as a subpopulation in the generated population. The new m is as follows:where µ is the subpopulation size. is the ith individual selected among the popsize individuals in the population. is the weight, and the sum of is 1. This rule indicates that the distribution center of the next-generation population will shift to the subpopulation.
- (3)
- Update operation: in this operation, C is updated to guide the population to search for global optimal solutions, including two operation modes: Rank−µ−update and Rank−1−update. The Rank−µ−update uses the deviation between the relative expectations of µ individuals, and the latter uses the deviation between the expectations of two adjacent generations [21].
4.3. SHPC Algorithm
| Algorithm 1. SHCP algorithm |
| Set k:= 0, H = 0, K = 101 |
| Randomly initialize positions and velocities of all particles of PSO |
| WHILE (the termination conditions are not met) |
| WHILE (k < 50 or ) |
| Step1: Exploitation stage (Execute PSO algorithm) |
| FOR (each particle i in the swarm) |
| Calculate fitness: Calculate the fitness value of the current particle: f (xi). |
| Update Pbest: Compare the fitness value of Pbest with f (xi). |
| If f (xi) is better than the fitness value of Pbest, then set Pbest to the current position xi; |
| Update Gbest: If f (xi) is better than the fitness value of Gbest, then Gbest is set to the position of the current particle xi; |
| Update velocities: Calculate velocities vi using Equation (25). If vi > vmax then vi = vmax.If vi < vmin then vi = vmin; |
| Update positions: Calculate positions xi using Equation (26); |
| END FOR |
| ELSE |
| Step 2: Exploitation stage (Execute CMA-ES and PSO algorithm) |
| WHILE (H < 100 & K > 100) (Execute CMA-ES algorithm) |
| Initialize population of CMA-ES (set Gbest as the m at CMA-ES) FOR (each individual i) |
| Update xi: Generating new individuals using the Gaussian distribution by Equation (27). |
| Calculate fitness: Calculate the fitness value of the current individuals: f (xi). |
| If f (xi) is better than the best fitness value, then set best fitness value as f (xi); |
| Update m: Updating m by the best μ individual in Equation (28) |
| Update C and σ: Covariance matrix C and Step σ are updated by Equations (29) and (31). |
| END FOR |
| If |
| H = 0. |
| ELSE |
| H = H + 1. |
| END IF |
| ELSE (Execute PSO algorithm) |
| Initialize positions of all particles as best position obtained by CMA-ES and set K = 0, H = 0 in the first iteration. Execute PSO algorithm same as Step 1 |
| If |
| K = 0. |
| ELSE |
| K = K + 1. |
| END IF |
| END WHILE |
| Set k:= k + 1; |
| END WHILE |
5. Experimental Settings
5.1. Settings of SMSRS
5.2. Cases of Inverse Kinematic Problems
5.2.1. Case 1: Minimum Position and Attitude Error of Two Modules
5.2.2. Case 2: Minimum Position and Attitude Error of Three Modules
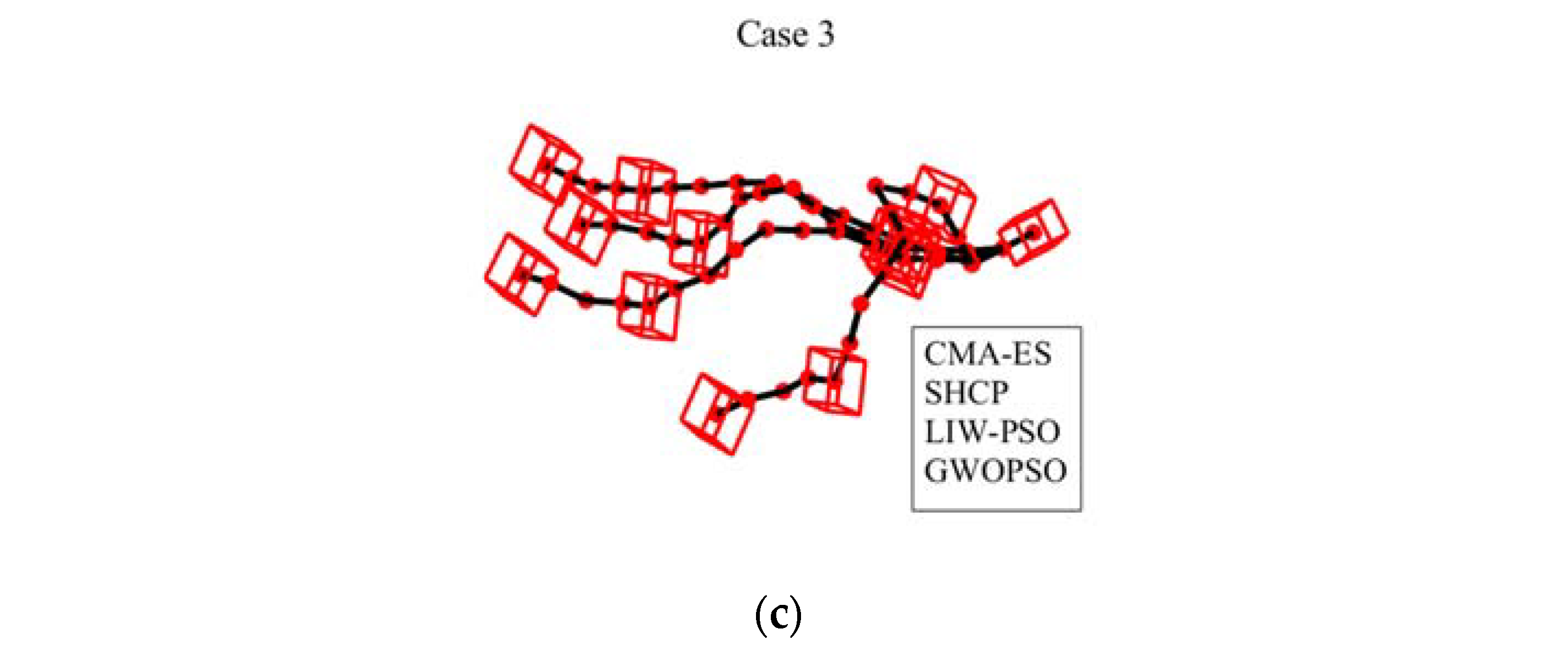
5.2.3. Case 3: Minimum Attitude Error of Four Modules
5.3. Settings of Compared Algorithms
6. Experiments and Comparison Results
6.1. Comparison Results in Solution Accuracy
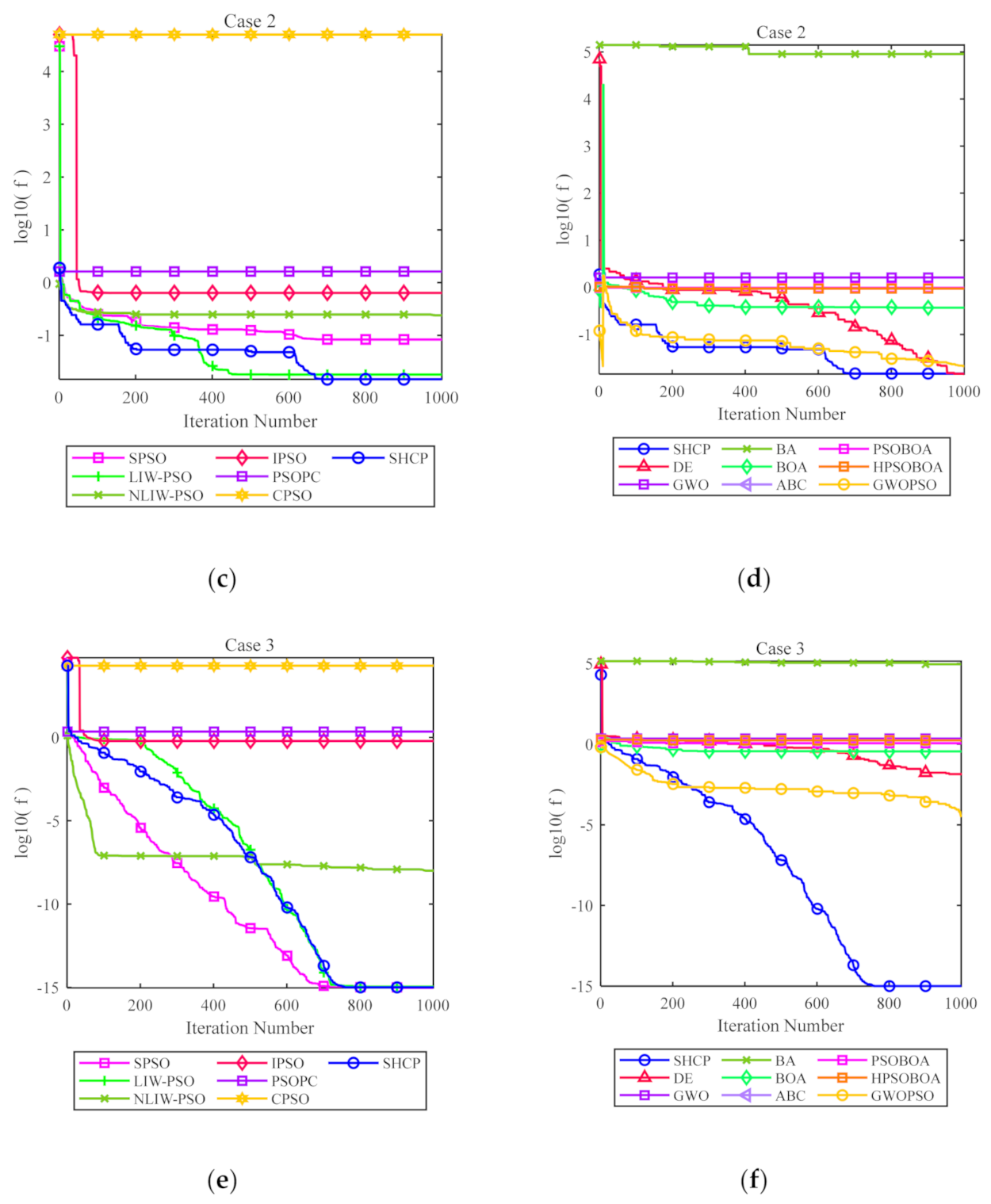
6.2. Result Comparisons on Convergence Curves
6.3. Self-Collision Avoidance
6.4. Feasibility Analysis of the Optimization Method
6.5. Effect Analysis of Segmented Hybrid
- (1)
- Case 1: the first segment in Figure 8a is the global search stage of the SHCP algorithm. At this stage, the curves of SHCP and LIW-PSO algorithms keep decreasing, but CMA-ES has stagnated, verifying that the LIW-PSO algorithm does have advantages in global search. After the continuous decline, the curve of the LIW-PSO algorithm in the fourth segment has gradually stabilized. At this segment, the SHCP algorithm runs the CMA-ES algorithm and its fitness value still fluctuates and decreases, breaking the stagnant trend of the original algorithm.
- (2)
- Case 2: in the first segment, the three curves decrease rapidly. After the SHCP algorithm enters the CMA-ES segment, the fitness value decreases rapidly after a period of the adaptation period, then trends to stagnation like the CMA-ES algorithm, while the curve of the LIW-PSO algorithm continues to decline. Whereas the LIW-PSO algorithm also tends to converge, the SHCP algorithm breaks through the bottleneck in the fifth segment and decreases rapidly until it exceeds the LIW-PSO algorithm. Case 2 indicates that when the convergence speed in the global search stage is unsatisfactory, the SHCP algorithm switches to the CMA-ES algorithm immediately to accelerate the fitness curve decline. It also demonstrates that the SHCP algorithm is constantly activated in the switching between LIW-PSO and CMA-ES algorithms, thus increasing the vitality of the algorithm.
- (3)
- Case 3: in this case, the LIW-PSO algorithm has shown excellent performance from the beginning. Therefore, the SHCP algorithm is always in the LIW-PSO segment until it obtains high-precision solutions, rendering CMA-ES useless. This phenomenon reflects that the SHCP algorithm could make full use of the excellent performance of the LIW-PSO algorithm, where LIW-PSO is applicable. It is also proven that the segmentation strategy can adaptively adjust the boundary of the global exploration stage and local exploitation stage.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Y.; Wang, W.; Sun, J.; Chang, H.; Huang, P. A Self-Reconfiguration Planning Strategy for Cellular Satellites. IEEE Access 2019, 7, 4516–4528. [Google Scholar] [CrossRef]
- An, J.; Li, X.; Zhang, Z.; Man, W.; Zhang, G. Joint Trajectory Planning of Space Modular Reconfigurable Satellites Based on Kinematic Model. Int. J. Aerosp. Eng. 2020, 2020, 8872788. [Google Scholar] [CrossRef]
- Liang, X.; Takeda, Y. An iterative method for the inverse kinematics of lower-mobility parallel mechanism with three RS or SR chains based on kinematically equivalent mechanism. Mech. Mach. Theory 2019, 141, 40–51. [Google Scholar] [CrossRef]
- Lee, C.S.G.; Ziegler, M. Geometric Approach in Solving Inverse Kinematics of PUMA Robots. IEEE Trans. Aerosp. Electron. Syst. 1984, 6, 695–706. [Google Scholar] [CrossRef]
- Nearchou, A.C. Solving the inverse kinematics problem of redundant robots operating in complex environments via a modified genetic algorithm. Mech. Mach. Theory 1998, 33, 273–292. [Google Scholar] [CrossRef]
- Chembuly, V.V.M.J.S.; Voruganti, H.K. An Optimization Based Inverse Kinematics of Redundant Robots Avoiding Obstacles and Singularities. In Proceedings of the Advances in Robotics, New Delhi, India, 28 June–2 July 2017. [Google Scholar]
- Lopez-Franco, C.; Hernandez-Barragan, J.; Alanis, A.Y.; Arana-Daniel, N. A soft computing approach for inverse kinematics of robot manipulators. Eng. Appl. Artif. Intel. 2018, 74, 104–120. [Google Scholar] [CrossRef]
- Jiokou Kouabon, A.G.; Melingui, A.; Mvogo Ahanda, J.J.B.; Lakhal, O.; Coelen, V.; Kom, M.; Merzouki, R. A Learning Framework to inverse kinematics of high DOF redundant manipulators. Mech. Mach. Theory 2020, 153, 103978. [Google Scholar] [CrossRef]
- Ananthanarayanan, H.; Ordóñez, R. Real-time Inverse Kinematics of (2n+1) DOF hyper-redundant manipulator arm via a combined numerical and analytical approach. Mech. Mach. Theory 2015, 91, 209–226. [Google Scholar] [CrossRef]
- Bjoerlykhaug, E. A Closed Loop Inverse Kinematics Solver Intended for Offline Calculation Optimized with GA. Robotics 2018, 7, 7. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, E.-S.; Mostafa, A.E.; Amira, Y.H. A comparative study of soft computing methods to solve inverse kinematics problem. Ain Shams Eng. J. 2018, 9, 2535–2548. [Google Scholar]
- El-Sherbiny, A.; Elhosseini, M.A.; Haikal, A.Y. A new ABC variant for solving inverse kinematics problem in 5 DOF robot arm. Appl. Soft Comput. 2018, 73, 24–38. [Google Scholar] [CrossRef]
- Zhang, L.; Xiao, N. A novel artificial bee colony algorithm for inverse kinematics calculation of 7-DOF serial manipulators. Soft Comput 2017, 23, 3269–3277. [Google Scholar] [CrossRef]
- Dereli, S.; Kker, R. A meta-heuristic proposal for inverse kinematics solution of 7-DOF serial robotic manipulator: Quantum behaved particle swarm algorithm. Artif. Intell. Rev. 2020, 53, 949–964. [Google Scholar] [CrossRef]
- Sancaktar, I.; Tuna, B.; Ulutas, M. Inverse kinematics application on medical robot using adapted PSO method. Eng. Sci. Technol. Int. J. 2018, 21, 1006–1010. [Google Scholar] [CrossRef]
- Fan, B.; Liang, Z. Omnidirectional kick in RoboCup3D simulation. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014. [Google Scholar]
- Nguyen, T.; Nguyen, H.; Dang, K.; Nguyen, P.; Pham, H.; Bui, A. Simulation and Experiment in Solving Inverse Kinematic for Human Upper Limb by Using Optimization Algorithm; Springer International Publishing: Cham, Switzerland, 2021; pp. 556–568. [Google Scholar]
- Zhang, Q.; Wang, D.; Gao, L. Research on the inverse kinematics of manipulator using an improved self-adaptive mutation differential evolution algorithm. Int. J. Adv. Robot. Syst. 2021, 18, 172988142110144. [Google Scholar] [CrossRef]
- Khaled Mohamed, H.E.; Elsharkawy, A. Dynamic analysis with optimum trajectory planning of multiple degree-of-freedom surgical micro-robot. Alex Eng. J 2018, 57, 4103–4112. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No Free Lunch Theorems for Optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Chen, H.; Heidari, A.A.; Wang, M.; Zhang, X.; Chen, Y.; Pan, Z. Orthogonal learning covariance matrix for defects of grey wolf optimizer: Insights, balance, diversity, and feature selection. Knowl.-Based Syst. 2021, 213, 106684. [Google Scholar] [CrossRef]
- Şenel, F.A.; Gökçe, F.; Yüksel, A.S.; Yiğit, T. A novel hybrid PSO–GWO algorithm for optimization problems. Eng. Comput. 2019, 35, 1359–1373. [Google Scholar] [CrossRef]
- Niu, B.; Zhu, Y.; He, X.; Wu, H. MCPSO: A multi-swarm cooperative particle swarm optimizer. Appl. Math. Comput. 2007, 185, 1050–1062. [Google Scholar] [CrossRef] [Green Version]
- Xu, P.; Luo, W.; Lin, X.; Qiao, Y.; Zhu, T. Hybrid of PSO and CMA-ES for Global Optimization. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019. [Google Scholar]
- Xu, Y.; Ye, Q.; Hoorfar, A. Surface Reconstruction of Large Reflector Antennas Based on a Hybrid of CMA-ES and HIO Algorithms. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019. [Google Scholar]
- Chander, A.; Chatterjee, A.; Siarry, P. A new social and momentum component adaptive PSO algorithm for image segmentation. Expert Syst. Appl. 2011, 38, 4998–5004. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, Anchorage, AK, USA, 4–9 May 1998. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Jiao, B.; Lian, Z.; Gu, X. A dynamic inertia weight particle swarm optimization algorithm. Chaos Soliton Fract. 2008, 37, 698–705. [Google Scholar] [CrossRef]
- Clerc, M. The swarm and the queen: Towards a deterministic and adaptive particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Lee, T.-Y.; Chen, C.-L. Unit commitment with probabilistic reserve: An IPSO approach. Energy Convers. Manag. 2007, 48, 486–493. [Google Scholar] [CrossRef]
- He, S.; Wu, Q.; Wen, J.; Saunders, J.; Paton, R. A particle swarm optimizer with passive congregation. Biosystems 2004, 78, 135–147. [Google Scholar] [CrossRef]
- Mao, B.; Xie, Z.; Wang, Y.; Handroos, H.; Wu, H.; Shi, S. A hybrid differential evolution and particle swarm optimization algorithm for numerical kinematics solution of remote maintenance manipulators. Fusion Eng. Des. 2017, 124, 587–590. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Aliyev, R.; Kiani, F.; Gulle, M.U.; Basyildiz, H.; Shah, M.A. Hybrid algorithms based on combining reinforcement learning and metaheuristic methods to solve global optimization problems. Knowl.-Based Syst. 2021, 223, 107044. [Google Scholar] [CrossRef]
- Yang, Q.; Dong, N.; Zhang, J. An enhanced adaptive bat algorithm for microgrid energy scheduling. Energy 2021, 232, 121014. [Google Scholar] [CrossRef]
- Zhang, M.; Long, D.; Qin, T.; Yang, J. A Chaotic Hybrid Butterfly Optimization Algorithm with Particle Swarm Optimization for High-Dimensional Optimization Problems. Symmetry 2020, 12, 1800. [Google Scholar] [CrossRef]
- Yang, J.; Cui, J.; Zhang, Y.-D. Artificial bee colony algorithm with adaptive covariance matrix for hearing loss detection. Knowl.-Based Syst. 2021, 216, 106792. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D-H Parameters of a Side | D-H Parameters of b Side | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Link | Link | ||||||||
| 1 | 0 | 0 | 0 | 0 | v-0 | 90 | 0 | 90 | 0 |
| 2 | 90 | 0 | 90 | 0.198 | 1-v | 0 | −0.243 | 90 | 0 |
| 3 | −90 | 0.243 | −90 | 0 | 2 | −90 | 0 | 90 | 0 |
| 4 | −90 | 0 | −90 | 0 | 3 | 90 | 0 | −90 | 0.198 |
| 5 | 90 | 0 | 90 | 0.198 | 4 | −90 | −0.243 | −90 | 0 |
| 6 | −90 | 0.243 | 90 | 0 | 5 | −90 | 0 | 90 | 0 |
| 7 | −90 | 0 | −90 | 0 | 6 | 90 | 0 | −90 | 0.198 |
| 8 | 90 | 0 | 90 | 0.198 | 7 | −90 | −0.243 | −90 | 0 |
| 9 | −90 | 0.243 | 90 | 0 | 8 | −90 | 0 | 90 | 0 |
| 10 | −90 | 0 | −90 | 0 | 9 | 90 | 0 | −90 | 0.198 |
| 11 | 90 | 0 | 90 | 0.198 | 10 | −90 | −0.243 | −90 | 0 |
| 12 | −90 | 0.243 | 90 | 0 | 11 | −90 | 0 | 90 | 0 |
| - | - | - | - | - | 12 | 90 | 0 | −90 | 0.198 |
| Algorithm | Parameter Setting |
|---|---|
| SPSO | |
| LIW-PSO [28] | |
| NLIW-PSO [29] | |
| CPSO [30] | |
| IPSO [31] | |
| PSOPC [32] | |
| SHCP | |
| DE [33] | |
| GWO [34] | |
| BA [35] | |
| ABC [37] | |
| BOA [36] | |
| PSOBOA [36] | |
| HPSOBOA [36] | |
| PSOGWO [22] |
| FUN | SHPC | SPSO | LIW-PSO | NLIW-PSO | CPSO | IPSO | PSOPC | |
|---|---|---|---|---|---|---|---|---|
| Mean | 8.29 10−3 | 5.00 × 103 | 3.00 × 103 | 1.74 × 10−1 | 6.00 × 104 | 7.16 × 10−1 | 1.31 | |
| Best | 7.21 × 10−12 | 6.52 × 10−12 | 9.40 × 10−7 | 6.25 × 10−3 | 4.00 × 104 | 5.06 × 10−1 | 1.31 | |
| Worst | 4.12 × 10−2 | 3.00 × 104 | 3.00 × 104 | 5.77 × 10−1 | 9.00 × 104 | 1.15 | 1.31 | |
| Std | 1.66 × 10−2 | 1.08 × 104 | 9.49 × 103 | 1.82 × 10−1 | 1.41 × 104 | 2.10 × 10−1 | 2.34 × 10−16 | |
| median | 5.20 × 10−6 | 1.88 × 10−3 | 3.24 × 10−4 | 9.11 × 10−2 | 6.00 × 104 | 7.06 × 10−1 | 1.31 | |
| Mean | 3.92 × 10−2 | 8.00 × 103 | 3.45 × 10−1 | 4.57 × 10−1 | 6.70 × 104 | 2.00 × 103 | 1.62 | |
| Best | 1.48 × 10−2 | 8.39 × 10−2 | 8.13 × 10−2 | 2.41 × 10−1 | 5.00 × 104 | 6.40 × 10−1 | 1.62 | |
| Worst | 8.47 × 10−2 | 3.00 × 104 | 9.02 × 10−1 | 6.69 × 10−1 | 9.00 × 104 | 2.00 × 104 | 1.62 | |
| Std | 1.90 × 10−2 | 1.32 × 104 | 2.75 × 10−1 | 1.55 × 10−1 | 1.57 × 104 | 6.32× 103 | 0.00 | |
| median | 3.97 × 10−2 | 2.36 × 10−1 | 2.62 × 10−1 | 4.13 × 10−1 | 6.50 × 104 | 1.42 | 1.62 | |
| Mean | 1.21 × 10−2 | 1.26 × 10−2 | 1.76 × 10−1 | 1.70 × 10−2 | 4.80 × 104 | 1.45 | 2.22 | |
| Best | 9.97 × 10−16 | 9.35 × 10−16 | 1.10 × 10−15 | 1.02 × 10−8 | 2.00 × 104 | 6.09 × 10−1 | 2.22 | |
| Worst | 6.99 × 10−2 | 1.25 × 10−1 | 1.08 | 6.24 × 10−2 | 7.00 × 104 | 2.61 | 2.22 | |
| Std | 2.58 × 10−2 | 3.96 × 10−2 | 3.58 × 10−1 | 2.18 × 10−2 | 1.69 × 104 | 5.73 × 10−1 | 0.00 |
| FUN | MY-PSO | DE | GWO | BA | ABC | CMA-ES | BOA | |
|---|---|---|---|---|---|---|---|---|
| Mean | 8.29 × 10−3 | 4.38 × 10−2 | 1.31 | 9.50 × 104 | 3.90 × 10−1 | 5.63 × 10−2 | 1.32 × 10−1 | |
| Best | 7.21 × 10−12 | 7.53 × 10−3 | 1.31 | 5.00 × 104 | 2.30 × 10−1 | 1.62 × 10−2 | 4.37 × 10−2 | |
| Worst | 4.12 × 10−2 | 8.67 × 10−2 | 1.31 | 1.40 × 10+05 | 5.09 × 10−1 | 1.63 | 2.33 × 10−1 | |
| Std | 1.66 × 10−2 | 2.57 × 10−2 | 2.34 × 10−16 | 3.81 × 104 | 8.44 × 10−2 | 4.60 × 10−2 | 6.20 × 10−2 | |
| median | 5.20 × 10−6 | 4.85 × 10−2 | 1.31 | 9.00 × 104 | 4.00 × 10−1 | 3.89 × 10−2 | 1.32 × 10−1 | |
| Mean | 3.92 × 10−2 | 3.23 × 10−2 | 1.62 | 9.20 × 104 | 9.93 × 10−1 | 5.82 × 10−2 | 6.16 × 10−1 | |
| Best | 1.48 × 10−2 | 1.45 × 10−2 | 1.62 | 9.00 × 104 | 7.96 × 10−1 | 3.06 × 10−2 | 3.68 × 10−1 | |
| Worst | 8.47 × 10−2 | 7.69 × 10−2 | 1.62 | 1.10 × 105 | 1.15 | 1.06 | 8.09 × 10−1 | |
| Std | 1.90 × 10−2 | 1.78 × 10−2 | 0.00 | 6.32× 103 | 1.25 × 10−1 | 2.06 × 10−2 | 1.40 × 10−1 | |
| median | 3.97 × 10−2 | 2.88 × 10−2 | 1.62 | 9.00 × 104 | 1.03 | 5.63 × 10−2 | 6.26 × 10−1 | |
| Mean | 1.21 × 10−2 | 3.00 × 10−2 | 2.22 | 9.50 × 104 | 1.79 | 7.02 × 10−2 | 9.99 × 10−1 | |
| Best | 9.97 × 10−16 | 1.21 × 10−2 | 2.22 | 5.00 × 104 | 1.57 | 4.27 × 10−2 | 3.56 × 10−1 | |
| Worst | 6.99 × 10−2 | 4.51 × 10−2 | 2.22 | 1.40 × 10+05 | 2.03 | 1.04 × 10−1 | 1.58 | |
| Std | 2.58 × 10−2 | 1.08 × 10−2 | 0.00 | 2.92 × 104 | 1.75 × 10−1 | 2.06 × 10−2 | 4.05 × 10−1 | |
| median | 1.21 × 10−15 | 3.05 × 10−2 | 2.22 | 9.00 × 104 | 1.78 | 6.63 × 10−2 | 9.50 × 10−1 |
| FUN | MY-PSO | PSOBOA | HPSOBOA | PSOGWO | |
|---|---|---|---|---|---|
| Mean | 8.29 × 10−3 | 7.49 × 10−1 | 4.88 × 10−1 | 2.00 × 103 | |
| Best | 7.21 × 10−12 | 5.17 × 10−1 | 4.64 × 10−1 | 1.19 × 10−4 | |
| Worst | 4.12 × 10−2 | 8.84 × 10−1 | 5.48 × 10−1 | 2.00 × 104 | |
| Std | 1.66 × 10−2 | 1.23 × 10−1 | 2.70 × 10−2 | 6.32 × 103 | |
| median | 5.20 × 10−6 | 7.91 × 10−1 | 4.74 × 10−1 | 5.11 × 10−3 | |
| Mean | 3.92 × 10−2 | 1.08 | 9.70 × 10−1 | 2.37 × 10−1 | |
| Best | 1.48 × 10−2 | 9.81 × 10−1 | 9.46 × 10−1 | 2.12 × 10−2 | |
| Worst | 8.47 × 10−2 | 1.34 | 9.93 × 10−1 | 1.39 | |
| Std | 1.90 × 10−2 | 1.03 × 10−1 | 1.26 × 10−2 | 4.23 × 10−1 | |
| median | 3.97 × 10−2 | 1.07 | 9.71 × 10−1 | 6.54 × 10−2 | |
| Mean | 1.21 × 10−2 | 1.55 | 1.85 | 1.74 × 10−1 | |
| Best | 9.97 × 10−16 | 1.12 | 1.72 | 3.05 × 10−4 | |
| Worst | 6.99 × 10−2 | 1.89 | 1.91 | 8.86 × 10−1 | |
| Std | 2.58 × 10−2 | 2.54 × 10−1 | 6.48 × 10−2 | 3.51 × 10−1 | |
| median | 1.21 × 10−15 | 1.59 | 1.87 | 6.73 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, J.; Li, X.; Zhang, Z.; Zhang, G.; Man, W.; Hu, G.; He, J.; Yu, D. A Novel Method for Inverse Kinematics Solutions of Space Modular Self-Reconfigurable Satellites with Self-Collision Avoidance. Aerospace 2022, 9, 123. https://doi.org/10.3390/aerospace9030123
An J, Li X, Zhang Z, Zhang G, Man W, Hu G, He J, Yu D. A Novel Method for Inverse Kinematics Solutions of Space Modular Self-Reconfigurable Satellites with Self-Collision Avoidance. Aerospace. 2022; 9(3):123. https://doi.org/10.3390/aerospace9030123
Chicago/Turabian StyleAn, Jiping, Xinhong Li, Zhibin Zhang, Guohui Zhang, Wanxin Man, Gangxuan Hu, Junwei He, and Dingzhan Yu. 2022. "A Novel Method for Inverse Kinematics Solutions of Space Modular Self-Reconfigurable Satellites with Self-Collision Avoidance" Aerospace 9, no. 3: 123. https://doi.org/10.3390/aerospace9030123
APA StyleAn, J., Li, X., Zhang, Z., Zhang, G., Man, W., Hu, G., He, J., & Yu, D. (2022). A Novel Method for Inverse Kinematics Solutions of Space Modular Self-Reconfigurable Satellites with Self-Collision Avoidance. Aerospace, 9(3), 123. https://doi.org/10.3390/aerospace9030123