
Optimal Guidance Laws for a Hypersonic Multiplayer Pursuit-Evasion Game Based on a Differential Game Strategy



Abstract
1. Introduction
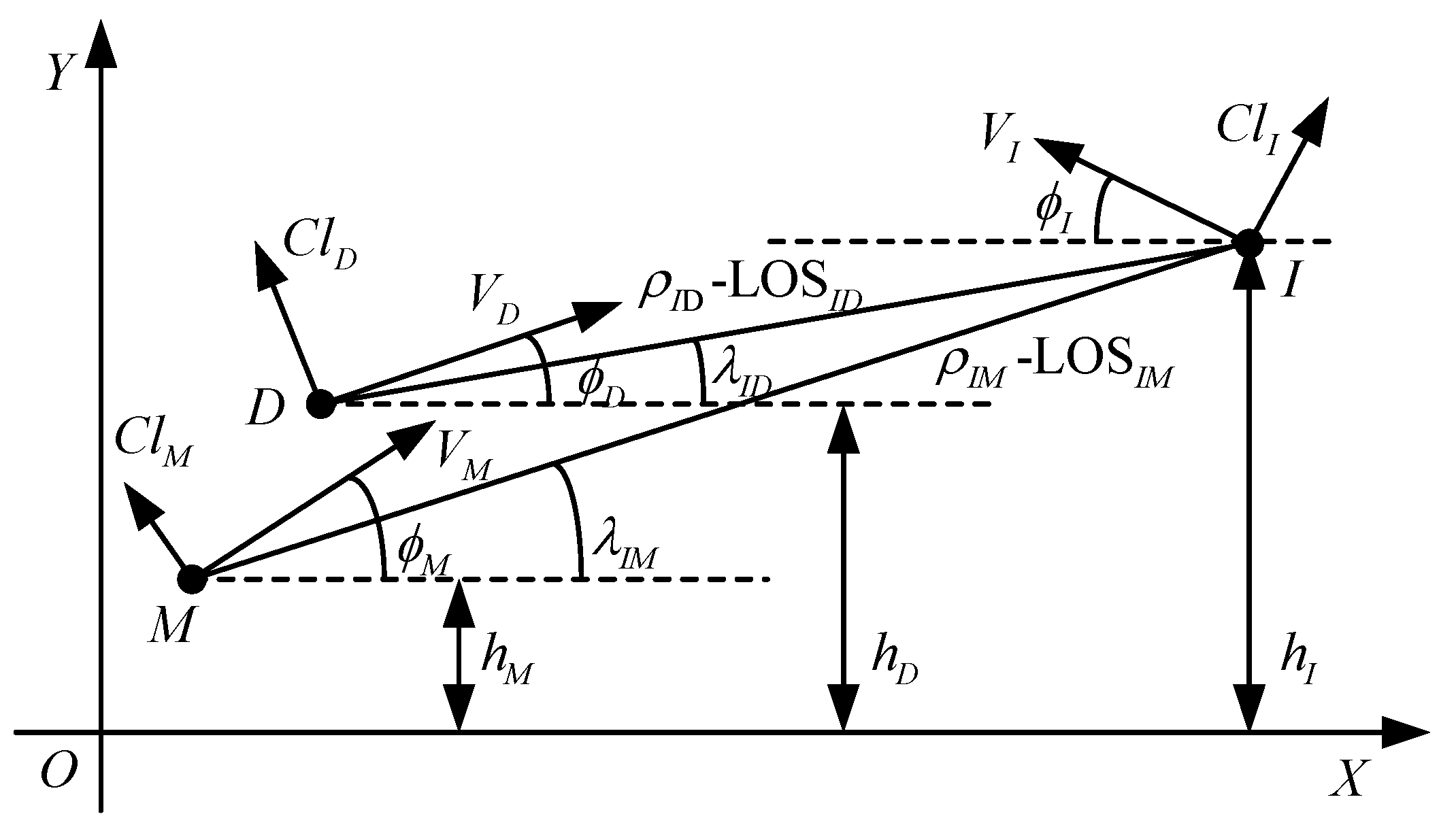
2. Engagement Formulation
2.1. Problem Statement
2.2. Equations of Motion
2.3. Linearized Equations of Motion
2.4. Timeline
3. Guidance Schemes
3.1. Cost Function
3.2. Cost Function
3.3. Proof of Saddle-Point Condition
4. Simulation and Analysis
4.1. Simulation Setup
4.2. Numerical Examples
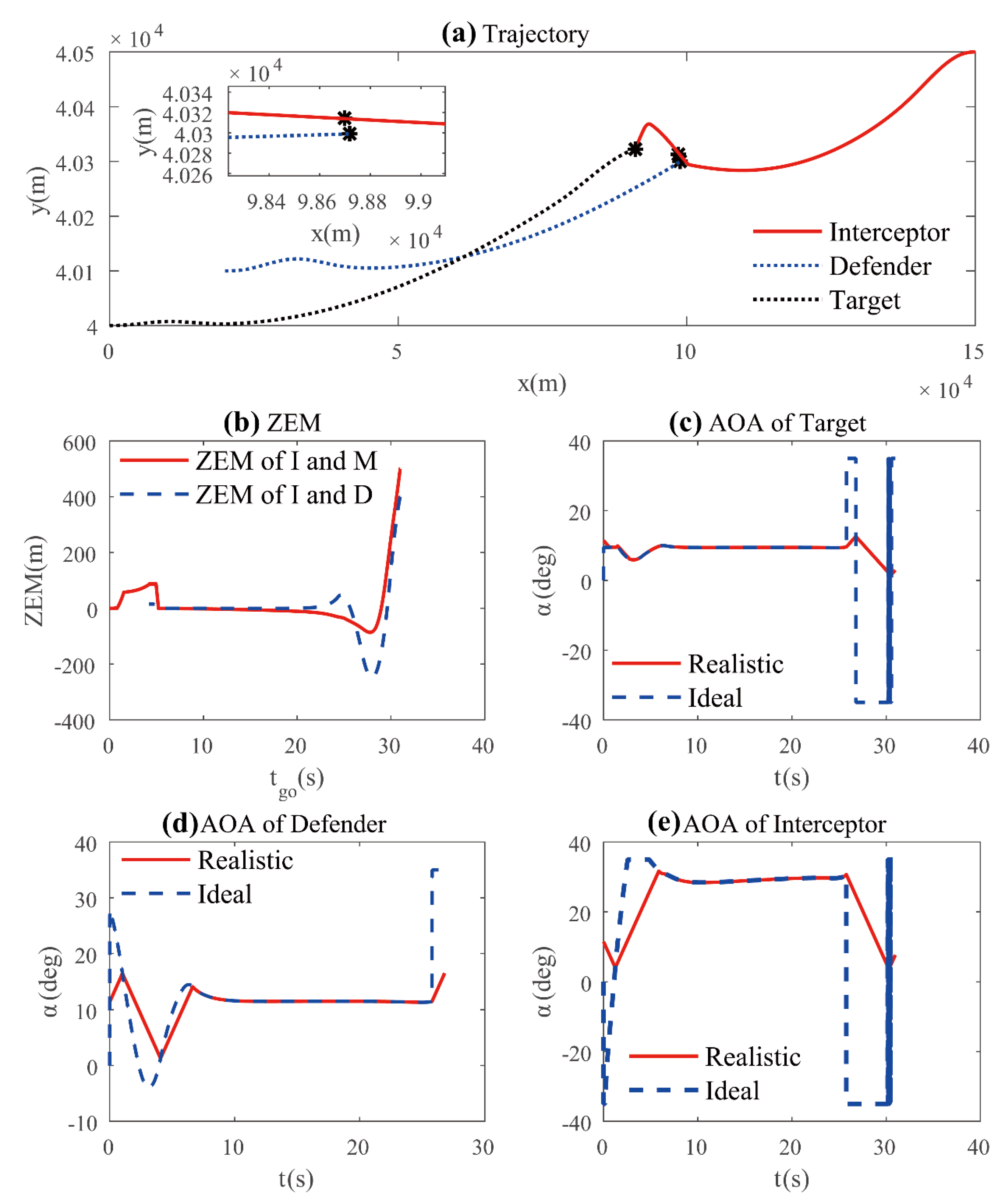
- The interceptor adopts PN guidance law, the defender adopts PN guidance law, and the target adopts LQOGL (PNvPNvLQOGL);
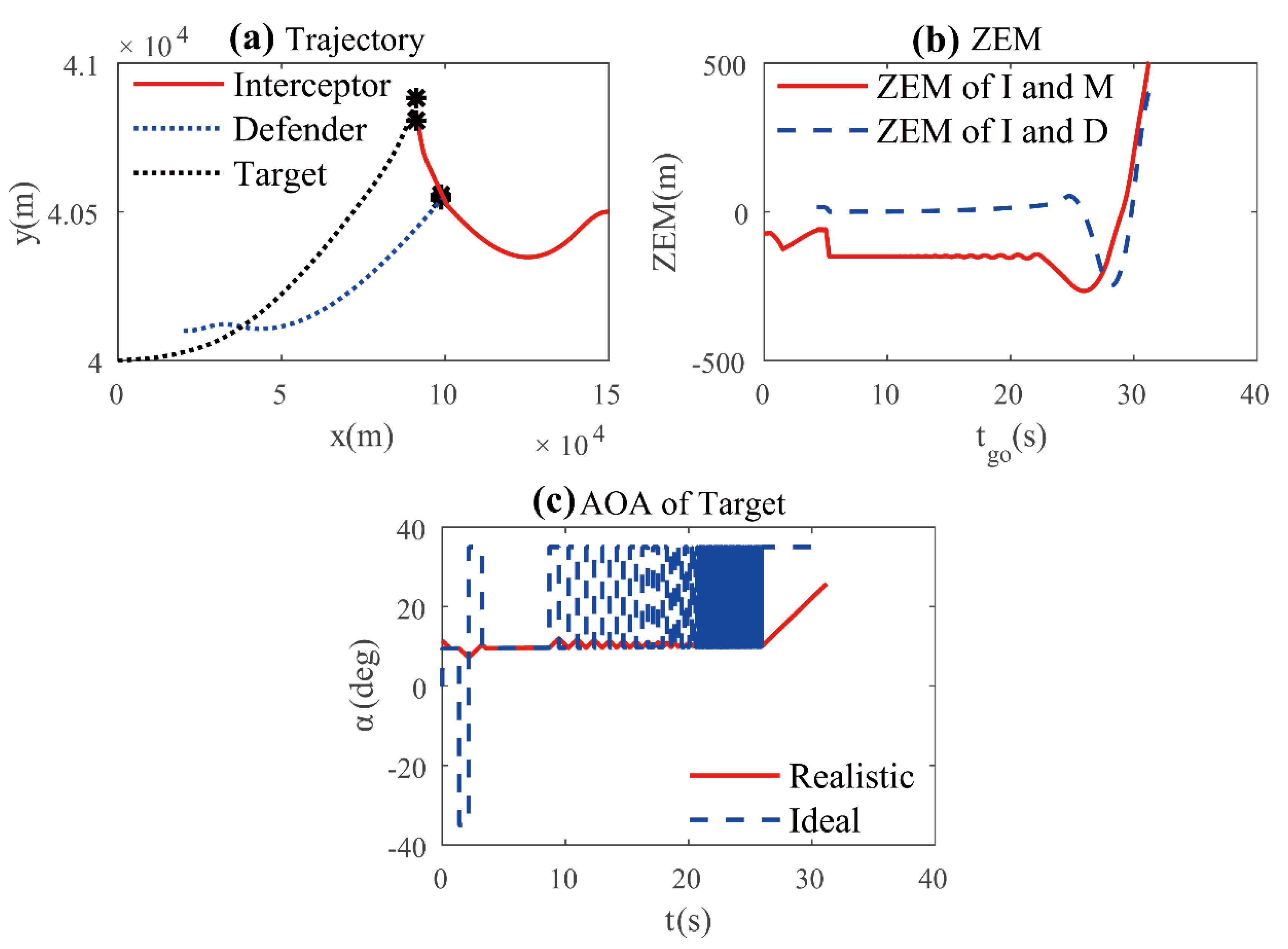
- The interceptor adopts PN guidance law, the defender adopts LQOGL, and the target adopts LQOGL (PNvLQOGLvLQOGL);
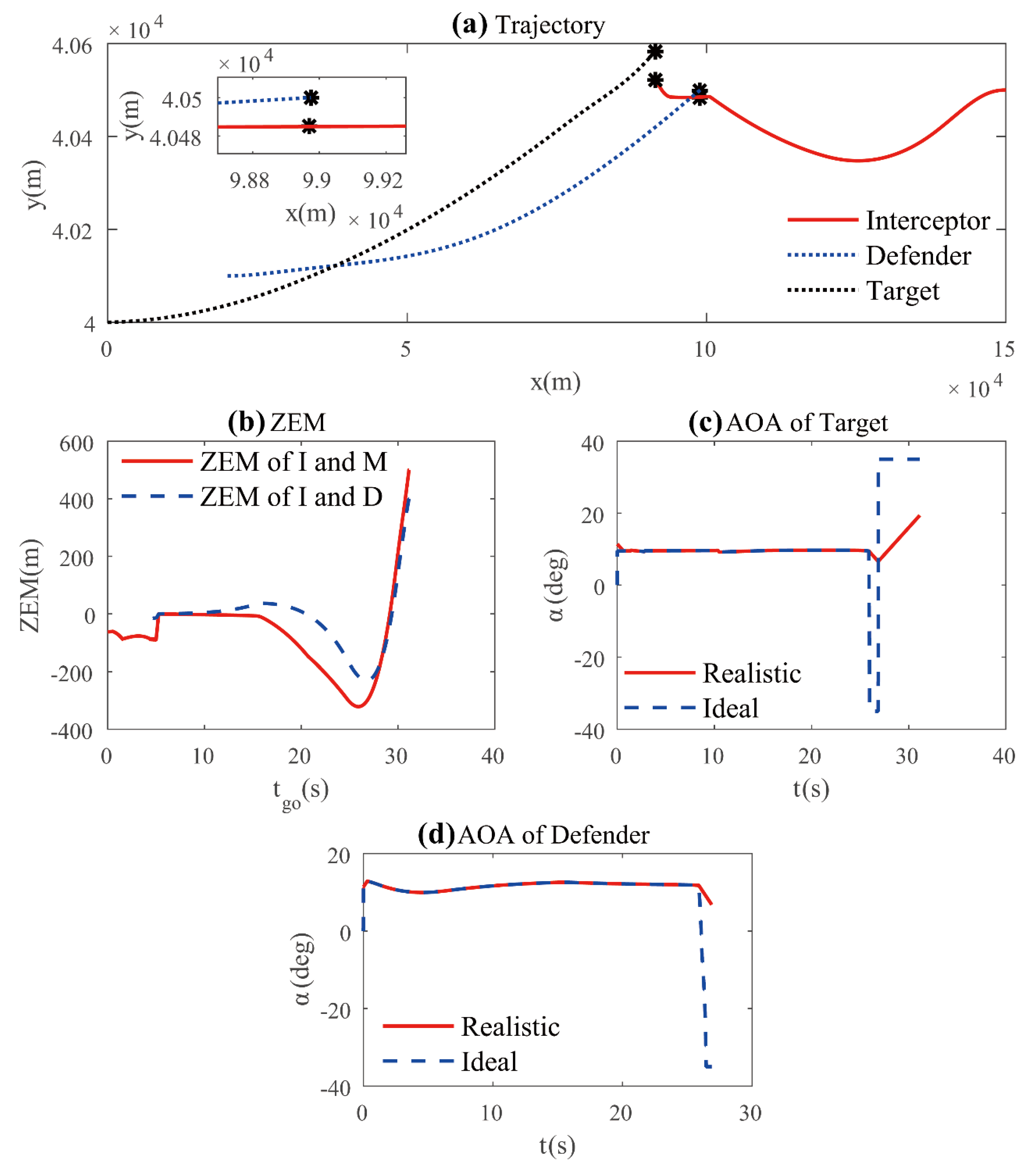
- The interceptor adopts LQOGL, the defender adopts LQOGL, and the target adopts LQOGL (LQOGLvLQOGLvLQOGL).
5. Conclusions
- In this research, a set of guidance laws for a hypersonic multiplayer pursuit-evasion game is derived based on linear-quadratic differential strategy. The energy cost, control saturation, chattering phenomenon, and aerodynamics were considered simultaneously. The satisfaction of saddle-point condition in a differential game was also proven theoretically.
- Nonlinear numerical examples of the multiplayer game were presented to validate the analysis. The advantage and efficiency of the proposed guidance were verified by the results. The LQOGLs exactly reduce the maneuverability requirement of the target in the pursuit-evasion game. Compared with the norm differential strategy, the proposed guidance strategy reduces the energy cost, alleviates the saturation problem, and avoids the chattering phenomenon, which guarantees task accomplishment and increases guidance phase stability.
- The performance of the interceptor showed that the proposed optimal guidance approach is able to complete the intercept mission if the interceptor possesses superior maneuverability. It is important to note that the saturation problem cannot be avoided completely when all the adversaries employ the LQOGL, since maneuverability is the most important factor in determining whether they will win or lose in the game. The interceptor or the target pair should make their best effort to attack or defend by exhaustedly performing maneuvers.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zarchan, P. Tactical and Strategic Missile Guidance; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2012. [Google Scholar]
- Yuan, P.J.; Chern, J.S. Ideal proportional navigation. J. Guid. Control Dyn. 1992, 15, 1161–1165. [Google Scholar] [CrossRef]
- Ryoo, C.-K.; Cho, H.; Tahk, M.-J. Optimal Guidance Laws with Terminal Impact Angle Constraint. J. Guid. Control Dyn. 2005, 28, 724–732. [Google Scholar] [CrossRef]
- Li, Y.; Yan, L.; Zhao, J.-G.; Liu, F.; Wang, T. Combined proportional navigation law for interception of high-speed targets. Def. Technol. 2014, 10, 298–303. [Google Scholar] [CrossRef]
- Ben-Asher, J.Z.; Cliff, E.M. Optimal evasion against a proportionally guided pursuer. J. Guid. Control Dyn. 1989, 12, 598–600. [Google Scholar] [CrossRef][Green Version]
- Shinar, J.; Steinberg, D. Analysis of Optimal Evasive Maneuvers Based on a Linearized Two-Dimensional Kinematic Model. J. Aircr. 1977, 14, 795–802. [Google Scholar] [CrossRef]
- Ye, D.; Shi, M.; Sun, Z. Satellite proximate interception vector guidance based on differential games. Chin. J. Aeronaut. 2018, 31, 1352–1361. [Google Scholar] [CrossRef]
- Fonod, R.; Shima, T. Multiple model adaptive evasion against a homing missile. J. Guid. Control Dyn. 2016, 39, 1578–1592. [Google Scholar] [CrossRef]
- Shaferman, V.; Oshman, Y. Stochastic cooperative interception using information sharing based on engagement staggering. J. Guid. Control Dyn. 2016, 39, 2127–2141. [Google Scholar] [CrossRef]
- Ho, Y.; Bryson, A.; Baron, S. Differential games and optimal pursuit-evasion strategies. IEEE Trans. Autom. Control 1965, 10, 385–389. [Google Scholar] [CrossRef]
- Anderson, G.M. Comparison of optimal control and differential game intercept missile guidance laws. J. Guid. Control Dyn. 1981, 4, 109–115. [Google Scholar] [CrossRef]
- Geng, S.-T.; Zhang, J.; Sun, J.-G. Adaptive back-stepping sliding mode guidance laws with autopilot dynamics and acceleration saturation consideration. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2019, 233, 4853–4863. [Google Scholar] [CrossRef]
- Eun-Jung, S.; Min-Jea, T. Three-dimensional midcourse guidance using neural networks for interception of ballistic targets. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 404–414. [Google Scholar] [CrossRef]
- Shima, T.; Idan, M.; Golan, O.M. Sliding-mode control for integrated missile autopilot guidance. J. Guid. Control Dyn. 2006, 29, 250–260. [Google Scholar] [CrossRef]
- Yang, Q.M.; Zhang, J.D.; Shi, G.Q.; Hu, J.W.; Wu, Y. Maneuver Decision of UAV in Short-Range Air Combat Based on Deep Reinforcement Learning. IEEE Access 2020, 8, 363–378. [Google Scholar] [CrossRef]
- Wang, L.; Yao, Y.; He, F.; Liu, K. A novel cooperative mid-course guidance scheme for multiple intercepting missiles. Chin. J. Aeronaut. 2017, 30, 1140–1153. [Google Scholar] [CrossRef]
- Song, J.; Song, S. Three-dimensional guidance law based on adaptive integral sliding mode control. Chin. J. Aeronaut. 2016, 29, 202–214. [Google Scholar] [CrossRef]
- Perelman, A.; Shima, T.; Rusnak, I. Cooperative differential games strategies for active aircraft protection from a homing missile. J. Guid. Control Dyn. 2011, 34, 761–773. [Google Scholar] [CrossRef]
- Shima, T. Optimal cooperative pursuit and evasion strategies against a homing missile. J. Guid. Control Dyn. 2011, 34, 414–425. [Google Scholar] [CrossRef]
- Shaferman, V.; Shima, T. Cooperative optimal guidance laws for imposing a relative intercept angle. J. Guid. Control Dyn. 2015, 38, 1395–1408. [Google Scholar] [CrossRef]
- Kumar, S.R.; Shima, T. Cooperative nonlinear guidance strategies for aircraft defense. J. Guid. Control Dyn. 2016, 40, 1–15. [Google Scholar] [CrossRef]
- Qi, N.; Sun, Q.; Zhao, J. Evasion and pursuit guidance law against defended target. Chin. J. Aeronaut. 2017, 30, 1958–1973. [Google Scholar] [CrossRef]
- Garcia, E.; Casbeer, D.W.; Fuchs, Z.E.; Pachter, M. Cooperative missile guidance for active defense of air vehicles. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 706–721. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, Q.; Liang, Z.; Li, P.; Ren, Z.; Zheng, Y. Fractional Calculus Guidance Algorithm in a Hypersonic Pursuit-Evasion Game. Def. Sci. J. 2017, 67, 688–697. [Google Scholar] [CrossRef]
- Guelman, M.; Shinar, J. Optimal guidance law in the plane. J. Guid. Control Dyn. 1984, 7, 471–476. [Google Scholar] [CrossRef]
- Zhang, Z.; Man, C.; Li, S.; Jin, S. Finite-time guidance laws for three-dimensional missile-target interception. Proc. IMechE Part G J. Aerosp. Eng. 2016, 230, 392–403. [Google Scholar] [CrossRef]
- Yong, E. Study on trajectory optimization and guidance approach for hypersonic glide-reentry vehicle. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2008. [Google Scholar]
- Sziroczak, D.; Smith, H. A review of design issues specific to hypersonic flight vehicles. Prog. Aerosp. Sci. 2016, 84, 1–28. [Google Scholar] [CrossRef]
- Li, H.; Zhang, R.; Li, Z.; Zhang, R. Footprint Problem with Angle of Attack Optimization for High Lifting Reentry Vehicle. Chin. J. Aeronaut. 2012, 25, 243–251. [Google Scholar] [CrossRef]
- Wang, J.; Liang, H.; Qi, Z.; Ye, D. Mapped Chebyshev pseudospectral methods for optimal trajectory planning of differentially flat hypersonic vehicle systems. Aerosp. Sci. Technol. 2019, 89, 420–430. [Google Scholar] [CrossRef]
- Yunqian, L.; Naiming, Q.; Xiaolei, S.; Yanfang, L. Game space decomposition dtudy of differential game guidance law for endoatmospheric interceptor missiles. Acta Aeronaut. Astronaut. Sin. 2010, 8, 1600–1608. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Adversary | ||
|---|---|---|---|
| Interceptor | Defender | Target | |
| Latitude | 0 | 0 | 0 |
| Longitude | 0 deg | 0.0031 deg | 0.023 deg |
| Altitude | 40.5 km | 40.1 km | 40 km |
| Horizonal velocity | −2000 m/s | 3000 m/s | 3000 m/s |
| Vertical velocity | 0 | 0 | 0 |
| Maximum AOA | 35 deg | 35 deg | 35 deg |
| Rate of AOA change | 6 deg/s | 5 deg/s | 3 deg/s |
| Time constant | 0.005 s | 0.01 s | 0.01 s |
| Killing radius | 0.3 m | 0.5 m | 0.5 m |
| Engagements | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| PNvPNvLQOGL | PNvLQOGLvLQOGL | LQOGLvLQOGLvLQOGL | |
| 15.01 m | −15.03 m | 15.01 m | |
| −0.17 m | −28.07 m | −0.17 m | |
| Result | Target is intercepted by interceptor | Interceptor is expelled by the defender. | Target is intercepted by the interceptor. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Li, Z.; Wu, J.; Zheng, Y.; Chu, H.; Wang, J. Optimal Guidance Laws for a Hypersonic Multiplayer Pursuit-Evasion Game Based on a Differential Game Strategy. Aerospace 2022, 9, 97. https://doi.org/10.3390/aerospace9020097
Liang H, Li Z, Wu J, Zheng Y, Chu H, Wang J. Optimal Guidance Laws for a Hypersonic Multiplayer Pursuit-Evasion Game Based on a Differential Game Strategy. Aerospace. 2022; 9(2):97. https://doi.org/10.3390/aerospace9020097
Chicago/Turabian StyleLiang, Haizhao, Zhi Li, Jinze Wu, Yu Zheng, Hongyu Chu, and Jianying Wang. 2022. "Optimal Guidance Laws for a Hypersonic Multiplayer Pursuit-Evasion Game Based on a Differential Game Strategy" Aerospace 9, no. 2: 97. https://doi.org/10.3390/aerospace9020097
APA StyleLiang, H., Li, Z., Wu, J., Zheng, Y., Chu, H., & Wang, J. (2022). Optimal Guidance Laws for a Hypersonic Multiplayer Pursuit-Evasion Game Based on a Differential Game Strategy. Aerospace, 9(2), 97. https://doi.org/10.3390/aerospace9020097