Abstract
Unmanned Aircraft System Traffic Management (UTM) is a traffic management system enabling drones to safely and efficiently fly in low-altitude airspace below 120~150m (400~500ft). UTM provides services such as communication, flight route management, location monitoring, and collision avoidance so that drones completing various missions can fly beyond visual line of sight (BVLOS) safely and increase the usability of airspace. In other words, UTM is a new air traffic management for drones with high levels of automation, advanced decision making and control. Many countries around the world are developing UTM systems that systematically manage the traffic of drones flying at low altitude. In Korea, UTM research has been ongoing as an R&D project since 2017. The purpose of this paper is to introduce the Korean UTM system and to apply it to actual flight demonstration through the developed operational procedures. The approach of this article is to establish Korean UTM architecture through existing references and examples from other countries, devise an operational procedure suitable for the system, and describe the results of using it for flight demonstration. In other words, this paper covers Korea’s UTM architecture, operational procedures, and flight demonstration through a macro approach to UTM. In addition, this paper presents policy and technical challenges that UTM must go through and that need to be solved in the future, which are classified into four categories.
1. Introduction
The management of national airspace is directly related to human safety and is a representative public domain for which it is necessary to prepare standards such as technology development, technical standards and domestic and foreign certification systems. However, the current state of traffic management for drones at the national level has room for improvement. The national aviation authorities provide air traffic services and information so that manned aircraft within jurisdiction can fly safely and efficiently, but they do not provide such services for unmanned aerial vehicles such as drones.
The drone industry is expected to grow rapidly, and the need to develop and establish a low-altitude UTM (Unmanned Aircraft System Traffic Management) at the national level is emerging to ensure stable BVLOS (Beyond Visual Line of Sight) flight of many drones and public safety in the future [1,2]. As for the UTM system, there is no standardized system at this time, even though R&D and initial pilot programs are being promoted worldwide. In addition, there are differences in the operating concept and shape of the UTM system according to the situation of each country. ICAO’s (International Civil Aviation Organization) approach to UTM focuses on the part that is linked to ATM where the international standard is set, and only suggests the direction for UTM itself [3].
In Korea, UTM research has been in progress since 2017, with an R&D project funded by the Korean government (MOLIT; Ministry of Land, Infrastructure and Transport). It is led by KIAST (Korea Institute of Aviation Safety Technology), and a total of 10 organizations are participating. Figure 1 shows the operation range and concept of UTM in Korea.
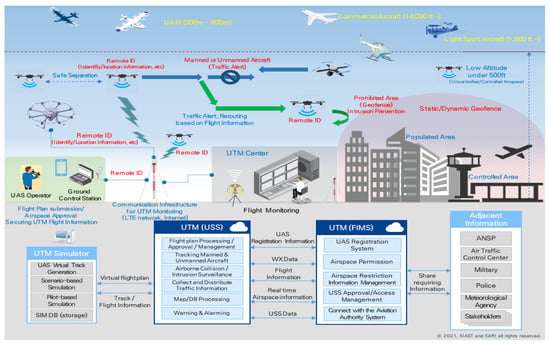
Figure 1.
Operation Range and Concept of UTM in Korea.
There are diverse opinions on how the National Aviation Authority will operate and manage the UTM business. Some argue that one centralized USS is sufficient since Korea is not a large country, while others claim that USSs should be divided by region, or multiple USSs should provide UTM services competitively in one area in the same way as mobile communication businesses [4]. So, the research team set the goal of a Korean UTM system model to enable multiple-USS operation in preparation for the emergence of various potential USSs. In addition, the U.S. UTM system model has a distributed structure, while Europe’s U-Space system model is structured with both centralized and distributed elements. In case of Korea’s UTM system, it has a distributed structure similar to that of the U.S.
In this paper, the current status of UTM R&D in Korea including Concept of Operation (ConOps), which provides functions and services, procedures, operation scenarios, and demonstrations, will be introduced. This concept of UTM in Korea was established in consideration of trend review of other countries around the world that started prior research on UTM and environmental factors (e.g., regulation system, drone flight standards, geographic environment etc.) for flying drones in Korea. Flight demonstrations were carried out and verified through defined architecture, function and services, operational procedures, and scenario, and continuous supplementation was performed through a total of 10 flight demonstrations. In addition, the direction in which Korea’s UTM should develop in the future is presented as four categories through the results derived from the demonstration. It is considered that all contents presented in this paper are limited to R&D rather than the Korean UTM at the national level.
2. UTM Trend Review
2.1. USA
From 2015 to 2021, NASA (National Aeronautics and Space Administration) and FAA (Federal Aviation Administration) conducted UTM R&D and demonstration in four stages for the efficient and safe use of airspace below 400 ft [5,6,7]. Twenty-four companies and institutions, including Amazon, participated in the research, and technology verification was conducted by dividing it into four TCLs (Technical Capability Levels). In 2019, TCL 4 was demonstrated in Reno, Nevada and Corpus Christi, Texas [8,9]. In addition, academic research on UTM-based autonomy, deconfliction, geo-fencing and contingency was also conducted by NASA [10,11,12,13,14,15,16].
The concept of operation and system structure of the UTM model in the U.S., where UTM research was first initiated, has been updated several times, and its framework has been added to by other countries [17,18]. In the U.S. UTM system, multiple private operators, or USSs (UAS Service Providers), develop UTM and provide it to pilots, and the government, FAA, sets the regulatory environment and manages the USSs through the FIMS (Flight Information Management System). FIMS is a gateway that manages USSs and flight information, and provides a national standard interface to the USSs. The flight information that FIMS manages may include manned and unmanned aircrafts’ location information, drone registration information, pilot qualification information, airspace information, national security facility location information and illegal drone information, etc.
In March 2020, the FAA announced “UTM Concept of Operation v2.0” following version 1.0 in 2018. This ConOps v2.0 continues to focus on UTM operation less than 400ft AGL (Above Ground Level) to the ground, but unlike the previous version that focused on G airspace, not only uncontrolled G airspace, but also controlled airspace (Class B, increasingly complex operating environment in Class C, D, and E) were also covered. In addition, the FAA has announced that ConOps v3.0, which has been updated to v2.0, will be released in 2022 [19].
2.2. Europe
In Europe, SESAR leads UTM research and uses the term U-Space instead of UTM. U-Space is a set of services and specific procedures designed to support safe, efficient and secure access to airspace for large numbers of drones [20,21,22]. In September 2017, a U-Space blueprint for UTM development in Europe was presented in four stages which are from U1 to U4. In October 2019, version 2 of the U-Space concept of operation was announced.
U1, which is the first stage in U-Space, aims to provide three basic services: e-registration including registration of drone and drone pilots, e-identification, and geo-fencing. U2 is a stage of providing initial services, such as flight planning and approval, tracking and traffic information. U3 provides enhanced services such as dynamic capacity management and tactical conflict resolution, and U4 is a full-service stage which includes a collaborative interface with ATC etc. Unlike the U.S. UTM model, which is a decentralized system, Europe’s U-Space model is a structured hybrid rendering both centralized and decentralized systems possible.
2.3. Japan
From 2017, the METI (Ministry of Economy, Trade and Industry) and NEDO (New Energy and Industrial Technology) of the Japanese government led a UTM project named DRESS (Drones and Robots for Ecologically Sustainable Societies) with private companies and research institutions [23]. The UTM demonstration of the DRESS project consists of four stages. Stages 1 and 2 consist of visual line of sight (VLOS) drone flight with remote control and automatic flight, and stages 3 and 4 include BVLOS flight operating in urban areas and areas of low population density such as islands and mountains, etc. In Japan’s UTM model, FIMS acts as a UTM general control tower and UASSPs (UAS Service Providers) are in charge of receiving and approving flight plans. The follow-up project of the DRESS project is scheduled for 2022 to 2026.
The UTM flight demonstration in Japan was conducted in 2019 at Fukushima Robot Test Field in Minami-Soma City. During the test, 29 UAS operators were connected to the UTM system and flew a total of 46 drones in a shared airspace, completing a total of 146 flights. Furthermore, in 2021, drones with missions such as coastal surveillance, illegal fishing surveillance, airport delivery, and emergency medicine delivery demonstrated BVLOS flight using a UTM system in Wakkanai City [24].
2.4. China
In China, a total of eight operators are providing the “UAS Cloud” service, a dynamic database management system that monitors flight data including drone operation information, location, altitude and speed in real time. According to the classification criteria of drones, it is stipulated that the system accesses the cloud at least every second, every 30 s, and once every minute to report the location. In addition, when a drone connected to the cloud flies to a no-fly zone, it has a function that activates a notification in the cloud. In Shenzhen, a UTM pilot service named UTMISS (UTM Information Service System) has been in progress since December 2018 [25,26].
2.5. Australia
Australia’s CASA (Civil Aviation Safety Authority) has approved the provision of an air mobility platform service that allows drone pilots to safely operate drones while complying with relevant laws and systems [27]. Furthermore, Australia’s ANSP (Air Navigation Service Provider) Air services released an RFI (Request For Information) for the development of a prototype of FIMS in 2020, and an RFP (Request For Proposal) in 2021, through which the business operator was selected in 2022. Four business operators were first selected to develop the FIMS prototype, and at the end of 2022, one final business operator responsible for FIMS development will be selected through testing and demonstration of the prototype [28].
2.6. Singapore
Singapore is promoting the establishment of a UTM system that reflects the city-state environment, and various studies and projects are underway for the operation of drones in the city [29]. A three-year project from 2018 to 2021, supported by the Ministry of Transport and Civil Aviation Authority of Singapore, proposed a solution for an automated UIM system that had just finished its run by private companies OneSky and Nova Systems [30]. Two flight demonstrations occurred in April and December 2019, including a study of the operational suitability of 4G and 5G networks to safely support UAS operations in Singapore. The final demonstration occurred earlier March 2021, when a mix of live flights and simulations showed how to handle the mass deployment of drones flying BVLOS [31].
2.7. GUTMA (Global UTM Association)
In January 2017, GUTMA, a non-profit private association related to UTM, was established with the participation of organizations from 15 countries around the world. GUTMA is open to both private and public organizations, including regulators, that are involved in UTM and drone activities. Furthermore, GUTMA aims to define the core common composition of UTM that can be used in each country, and to develop UTM based on this. GUTMA expects that this ecosystem of companies in the global drone services market will add real value to society and global economies [32,33,34].
3. UTM in Korea (K-UTM)
As mentioned in introduction UTM research in Korea has been started since 2017. When the research project was started, although the concept of UTM existed mostly worldwide, the system itself did not exist. So, in order to keep up with the rapidly improving technological development and to bring it into practical use as soon as possible, the research goal was adjusted to the demonstration of 20 or more drones in the two or three test beds using the developed UTM system, as the former research goal was a demonstration of five or more drones in one test-bed [35,36].
This R&D project is focused on developing a UTM system by splitting it into two phases. The first phase was set in 2017–2018 and the second phase in 2019–2022. In the first phase, a UTM system for testing close to a centralized type was developed. In other words, the focus was placed on system development for single-entity UTM system operation. Afterwards, the concept and direction of the UTM model began to be determined in detail worldwide. In line with this global trend, in the second phase, started in 2020, FIMS, which is a national UTM, and a UTM for USS are being developed separately, similarly to the U.S. UTM model. For reference, in the U.S. UTM model, multiple USSs develop a UTM system and provide it to the users, while the government, the FAA, sets the regulatory environment and manages the USSs through the FIMS.
3.1. Stakeholders
Stakeholders who constitute and participate in K-UTM may include NAA (National Aviation Authority), ANSP (Air Navigation Service Provider), FIMS (Flight Information Management System), USSs (UTM Service Suppliers), SDSP (Supplemental Data Service Provider), drones, drone pilots, managers, and users. The roles of each stakeholder are as follows.
- NAA (National Aviation Authority): the NAA is responsible for all civil air navigation safety in the airspace, prepares relevant safety regulations and policies, and supervises the implementation of those regulations.
- ANSP (Air Navigation Service Provider): ANSP means an ATM provider for navigation safety management and the safe integration of UTM in airspace; in Korea, it is a Regional Office of Aviation.
- FIMS (Flight Information Management System): FIMS manages information, such as drone registration and traffic status operating in accordance with national safety standards, and is a national flight information management network that exists as a gateway for data exchange with the NAA and USS.
- USS (UTM Service Supplier): a USS is a system operator that distributes drone operation systems which have functions such as automatic flight planning and real-time monitoring to users by business models or regionally.
- SDSP (Supplemental Data Service Provider): the SDSP provides additional information concerning factors such as weather, terrain, obstacles, etc.
- Drone: a drone that accesses the UTM system to fly.
- Drone Pilot: the drone pilot refers to the pilot who actually flies the drone connected to the UTM system.
- Manager: the manager responds to requests from users connected to the UTM system, and monitors drone flight through the UTM system.
- User: the user is the entity that using the UTM system, and generally performs procedures such as flight plan establishment and submission, and mission termination through the UTM system.
3.2. UTM Architecture & Concept of Operation
Currently, most drones in Korea are used in the public sector, except for leisure and photography. It is difficult to find a profit business model considering the cost of development, maintenance, operation and infrastructure provided by USS. In other words, the UTM industry market in Korea will be composed mainly of public institutions and private businesses that own and operate large numbers of their own drones. Therefore, many USSs will provide the services scattered throughout the country. For example, on the one hand, the UTM service coverage area of an airport operator is a very local and limited. On the other hand, the coverage of a UTM must be nationwide if an airport operator manages multiple airports nationwide. For the emergence of a large number of USSs in the public and private sectors, the UTM system in Korea has been developed as both a distributed type and a centralized type. Figure 2 shows the UTM architecture in Korea.
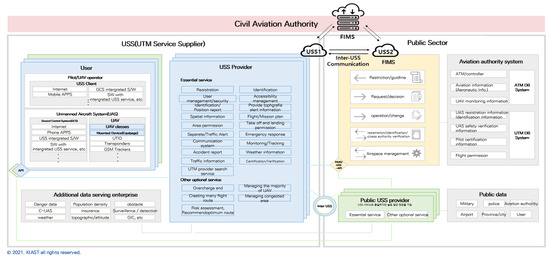
Figure 2.
Korea UTM Architecture.
3.3. Functions and Services
3.3.1. Function and Role of FIMS
FIMS is the national UTM system, and its main role is to provide as a gateway for data exchange with other systems such as ATM and USSs. Through R&D, the system shape of FIMS has been developed rather than the functional implementation, and detailed functions are to be developed and applied in the future. The roles and functions that FIMS should provide are as follows.
- Establishment and Provision of Regulation & Restrictions: Provision of aviation-related regulations, restrictions and guidelines, drone class, safety inspection, pilot requirements, special flight approval, rules of the air etc.
- Approval, Update and Verification of Registration, Qualification and License: FIMS secures a database of related information, such as drones and pilots, and can validate it.
- Define and Update Airspace Conditions: Provision of prohibited area, restricted area, UAS Volume Reservation (UVR), aeronautical information etc.
- Integrated Flight Information Management (Real-time Monitoring): Management of manned aircraft information, USS linkage information, access to active drone and UTM operation, etc.
- Airspace Management: Managing and providing related information such as drones entering and exiting the controlled airspace, link with ATM/USS etc.
- Noticing Information such as Emergency Situations to the Public or Related Stakeholders: Provision of UTM and ATM emergency situations, military training and related information, etc.
- Flight Information Storage and Accident Management: Provides a means to query and receive archived data of UTM operation for incident or accident investigations.
- USS Management: History/statistical management of USS such as flight plan processing, illegal flight and accident records, license renewal, establish USS requirements, etc.
- Setting Standards for Information Exchange between Stakeholders: Securing USS database and standardizing link protocols including ATM.
- Management of Personal Information Access Rights of Public/Legal Institutions: Setting the scope of information disclosure to relevant organizations due to illegal flight or interference, setting procedures for providing and disposal of information etc.
3.3.2. USS Providing Function and Services
The potential services that the USS can provide may vary depending on the type of airspace and flight, and above all, the business model provided by the USS. Therefore, it can be defined that the essential functions that USS must provide basically and the optional functions that can be provided specialized for each USS. Ultimately, it is thought that the USS should be able to provide the functions presented in the architecture of Figure 2. Detailed descriptions of the essential and optional functions/services are given in Appendix A.
Currently, the functions and services provided by the phase 2 UTM system through R&D include registration, flight plan submission and approval, strategic de-confliction, conformance monitoring, collision advisory and warnings, geo-fencing, weather information, airspace information, messages, takeoff and landing permission, etc. In particular, the research team has developed a device called UTID (UAS Tracking Identification Device) to transmit flight information to the UTM system. UTID transmits the flight information, including longitude, latitude, and altitude information, through the LTE network.
Registration, flight plan submission and approval and takeoff and landing permission through UTM do not reflect the current national policy and regulations of Korea, but are functions at the R&D level. At present, the drone must be registered with the NAA first, and in airspace where a flight permit is required, it must be flown after obtaining a flight permit from the aviation authority.
3.4. Operational Procedures
Operational procedures can be divided into pre-flight, in-flight, and post-flight procedures. This operational procedure is premised on participating in UTM after obtaining the drone special flight approval from the NAA, which is required for night flight and BVLOS flight in Korea. Furthermore, regarding flight approval, since only NAA can grant flight approval in Korea, the flight approval described in this operational procedure assumes that the UTM system has been delegated the authority of flight approval from the NAA. The detailed procedures are as follows.
3.4.1. Pre-Flight
Through the drone registration system, the user registers the drone information, and gets an authentication key for UTM registration. Then, the user proceeds to register the UTM system, and the drone information registered in the registration system is linked to the UTM system through authentication key. The manager checks whether the related information registered in the registration system and the UTM system is linked.
3.4.2. In-Flight
User can establish a flight plan once logged into the UTM system. Then, the user can designate the area, route, and time the user wants to fly, and submit a flight plan to the manager after establishing it. When the user submits the flight plan to the manager through the UTM system, the manager should review the submitted flight plan and approve or reject it. In the case of flight approval rejection, the users should submit the revised flight plan through the UTM system after receiving the rejection message from the manager. The manager should provide a reason for rejection and request resubmission of the flight plan through a message to the user. Reasons for the rejection of submitted flight plan are listed as follows.
- Overlapping and adjoining flight path and mission area with other UAS
- Overlapping and adjoining mission area area/flight route occupancy time with other UAS
- Emergency situation
- Unsatisfied with special flight approvals
The user starts preparing for take-off based on the approved flight plan, turns on the UTID which is equipped on the drone and requests permission for take-off from the manager. The manager permits take-off in consideration of the traffic volume of drones and the congestion level of the take-off area. The user who has received the take-off permission can fly according to the flight plan, and if an emergency situation occurs during the flight, the emergency situation should be resolved through the contingency plan. The manager monitors the drone in flight and provides support for safe drone flight. Methods that managers can support include issuing UVR, sending messages to nearby drones, and giving priority to drones in emergency situations. In addition, the manager should strive to resolve the emergency situation. The following are emergency situations that drones may face.
- UTID or drone itself communication loss
- Drone collision
- Drone crash
- Technical problems such as low battery and mechanical faults
After the emergency situation is resolved, the user reports to the manager through a message, and either resumes the planned mission or returns to the landing site. The manager can provide additional support based on the information reported by the user. The user of a drone approaching the landing site after flying makes a landing request to the manager, and the manager approves the landing in consideration of the surrounding traffic and congestion.
3.4.3. Post-Flight
After safely landing the drone on the landing site, the user should turn off the UTID power and proceed with the flight check of the drone through the pilot. If there is no abnormality in the drone, the user presses the mission termination button on the system to end all flights. The manager confirms that the identification of the UTID has disappeared from the UTM screen and that the flight has ended through the user’s mission termination. Figure 3 is a flowchart of the operational procedures, and left side is for user and right side is for manager.
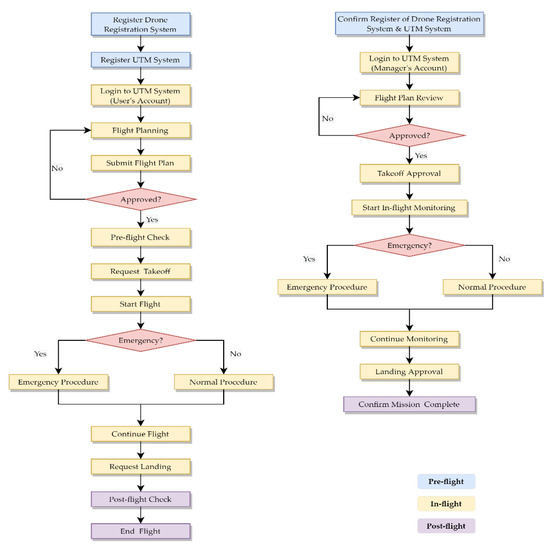
Figure 3.
UTM operational procedures (left: for users, right: for managers).
4. Flight Demonstrations of UTM in Korea
From 2018 to 2022, the Korean UTM research team has given a total of 10 flight demonstrations shown in Table 1. UTM flight demonstration is being conducted not only to verify the system and communication module under development, but also to test ConOps, procedures, and requirements that related to use cases necessary for operation. In this chapter, the test elements necessary for UTM demonstration were identified, and the flight demonstration scenarios necessary for the R&D phase 2 operation were derived in consideration of various flight situations, and the verification results are dealt with through actual flight demonstration [37].

Table 1.
Total of 10 flight demonstrations since 2018.
4.1. Flight Demonstration Scenario
4.1.1. Test Components and Events
The demonstration scenario is constructed by identifying factors that may affect the environment or restrictions in which UTM can operate properly, and considering various flight situations that may change during operation. The identified elements are called Test Components (TC) and items related to the flight situation are called Test Events (TE). The contents of each item are shown on Table 2 and Table 3. For reference, the demonstration of the TEs presented in this paper were all assumed.
Table 2.
Test Components (TC).
Table 3.
Test Events (TE).
4.1.2. Demonstration Scenarios
The demonstration scenarios for the UTM phase 2 operation based on the TC and TE are as follows.
- Scenario 1. Demonstration of overlap of flight plans in low-density airspace
Flights take place in a low-density, secluded area, which is an uncontrolled airspace, and drones of different missions submit simultaneous flight plans with take-off and landing points or routes that overlap. The UTM manager approves or disapproves the flight plan before flight, considering priority, and the operator revises and submits the flight plan after confirmation.
- 2.
- Scenario 2. Mission flight between different types of drones in medium-density airspace
A drone performing a mission using the UTM system in suburban area discovers hobby drones and paragliding that are not registered with UTM, and transmits the information to the UTM system. Other nearby drones participating in the UTM receive the information and prepare for collisions caused by obstacles, and the UTM system identifies and shares information about the different types of drones.
- 3.
- Scenario 3. Demonstration of emergency response including intervention by manned aircraft
While drones are performing different missions in high-density airspace such as an urban area, an emergency situation such as missing person occurs in the same (or nearby) airspace causes an emergency helicopter to fly and a UVR is issued. The drone that was performing the mission immediately performs a maintaining operation, emergency landing, emergency point standby, return to home, etc. according to the priority judgement of the pilot, and transmits the changed flight status to the UTM system. At the same time, the UTM system records flight plans that have been changed due to emergency situations.
- 4.
- Scenario 4. Response to loss of control during flight and information sharing
In a secluded but partially high-density area, a drone that loses control such as communication loss occurs during flight, and the drone attempts a safe landing at a designated point. In order to prepare for a collision between drones, mission information is shared and communicated with the UTM system, and the UTM system approves or disapproves modified flight plans for emergency situations in real time. Loss of control means all cases in which the pilot loses flight ability, communication failure, loss of control of the drone, electromagnetic interference or encounters with severe weather, sudden drone defects, collision with other drones, etc.
Table 4 shows the summary of relevant TCs and TEs for each scenario. Most of the items are reflected, but among the TCs, TC3 requires cooperation with the civil aviation authority (CAA). Furthermore, in the cases of BVLOS flight and night flight, special flight approval from CAA is prerequisite to participate UTM system due to Korean Aviation Safety Law. In the future, operational procedure research regarding cooperation and flight approval from CAA will accompany this.
Table 4.
Relevant TC and TE for each scenario.
4.2. Flight Demonstrations
In this section, there are detailed descriptions about the representative 3 flight demonstrations in Table 1. The three flight demonstrations are: a demonstration with UAM in an urban area, a high-density simultaneous demonstration, and a multi-region simultaneous demonstration. These three flight demonstrations can be expressed in Table 5 if they are applied to the four scenarios described above.
Table 5.
Scenarios used in flight demonstrations.
4.2.1. Demonstration with UAM at Urban Area
In November 2020, the Korean UTM system was used in an urban environment demonstration for verifying traffic management for multiple drones, including a total of eight drones including two UAM vehicles, at Han River Park in Yeouido, Seoul. A total of 37 sorties were flown.
The flight scenario was that drones would be carrying out their mission flights near the Han River (bridge inspection, bridge traffic survey, trail safety monitoring, water pollution survey), and the drone on the mission would make an emergency landing by issuing a UVR due to the UAM flight. The UAM was also equipped with an UTID device that can check flight information in the UTM system and the UAM flew over the Han River for two laps at a cruising altitude of about 50m. The UTM system issues UVR and monitors the real-time flight information of drones and UAM. In addition, through the ADS-B antenna that can receive flight information of manned aircraft, manned aircraft in the vicinity of the area were displayed on the UTM system. Figure 4 shows the identifications of drone and UAM, and the red section in Figure 5 shows the issuance of UVR.

Figure 4.
Identified UAM and drones in UTM system.

Figure 5.
Issuance of UVR (red section).
This demonstration was significant in that several drones and the UAMs performed flight demonstrations and the UTM system was used in an urban area, providing an opportunity to check the status of altitude and communication quality.
4.2.2. High-density Simultaneous Demonstration
In June 2021, 15 drones flew 181 sorties at Cheongna, Incheon, and a maximum of 13 drones performed simultaneous flights shown in Figure 6. As a scenario, a total of 15 drones performed each mission in a high-density environment within a radius of 1km of the demonstration area, and attempted a safe landing at a designated point for assumed situations such as UTID communication loss and communication loss with the drone itself.

Figure 6.
13 drones simultaneously flying in their mission regions.
UTID communication loss is a situation in which both the manager and the user are unable to check the flight information of the drone displayed on the UTM screen. At this time, the user reports to the manager, checks the normal operation of the drone through the pilot, the manager monitors the information obtained from the user and, if necessary, notifies users flying nearby using a message. Communication loss with the drone itself refers to cases where automatic flight is impossible, communication loss occurs with the GCS (Ground Control Station) and manual operation is required. In this case, the user reports to the manager and checks the emergency procedures through the pilot, the manager monitors the information obtained from the user through the UTM system, and if necessary, notifies users flying nearby using a message or issues a UVR in case of danger. In particular, the situation where both UTID and drone communication loss occurs at the same time is an urgent situation in which the drone may fall out of control and there is a risk of falling and crashing. In this case, the manager immediately issues a wide range of UVRs to induce emergency landings of drones flying around and notify the users by using a message. The message reporting format shown in Table 6 was used for notification between the manager and the user.
Table 6.
Format and examples of messages.
Through the flight demonstration, the research team achieved the simultaneous flight of more than 10 drones, which was the goal of the demonstration. In addition, there were important research achievements that could establish the operational flow, response plan for abnormal situations, and testing notifications using the message report format. However, new technical problems were discovered, such as instability of the UTM connection in the external environment and the need to correct UTID location information.
4.2.3. Multi-Region Simultaneous Demonstration
In June 2022, 26 drones demonstrated simultaneous flight in eight regions (Incheon, Daejeon, Busan, Daegu, Anyang, Icheon, Gunwi, Gapyeong) in Korea. A total of 84 sorties were flown, and this demonstration was the first time using the second phase of the UTM system developed by the research team. The difference from the first phase UTM system is that FIMS, a national UTM which was developed in early 2022, was applied to the demonstration, and related functions were checked and confirmed by improving the functions and user interface of the UTM system for USS.
The main function applied to the UTM system is that UTTS (UTM Tracking and Traffic monitoring System), the core UTM system module, was applied. As the automatic conformance monitoring of the UTM system is possible, the UTM system itself notifies the user of proximity warnings that may occur to the drones during flight, such as adjacent flights between drones, drones leaving the mission area, and drones crossing the geo-fences. Currently, the distance standards for proximity are 5 m (red), 10 m (orange), 15 m (yellow) and in the future, it will be specifically derived with the consideration of factors such as weather and drone performance that may affect distance standards.
The research team developed a drone registration system for research that mimics the national drone registration system at the end of 2021; the work to link it with the UTM system was carried out in early 2022, and applied in this flight demonstration. Currently, the registration of drones in Korea has to be reported to the NAA. It is difficult to actually link drone registration information managed by the NAA with the UTM system for research because UTM is not yet legislated and linked to national systems. The detailed linkage procedure is described in the operation procedure in Section 3.4.
Figure 7 shows the screen of FIMS, and Figure 8 shows the UTM system for USS. The flight plan submitted by the users is listed on the left side of Figure 8, and through this, the manager can approve or reject the flight plan. Furthermore, in the upper right corner the conformance monitoring notification of UTTS by color is shown.
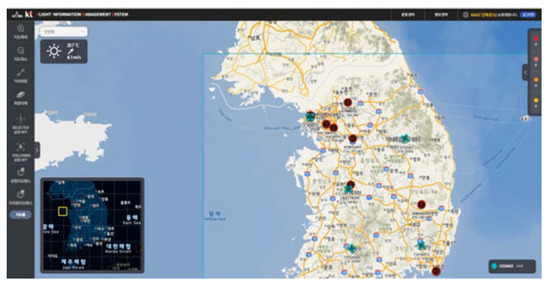
Figure 7.
Drones identified through FIMS.
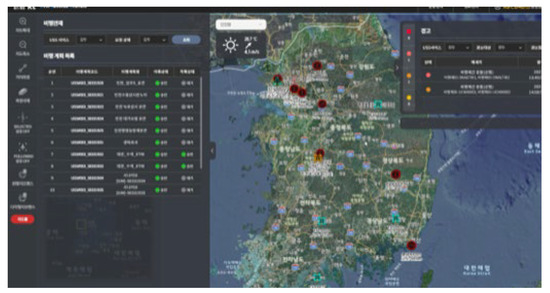
Figure 8.
UTM system for USS.
4.3. K-Drone Demonstration Program (UTM Pilot Program)
In June 2020, the MOLIT of the Republic of Korea announced the “K-Drone System (Korean UTM) Commercialization Promotion Plan” to support an ongoing R&D project, to establish FIMS and to initiate an UTM demonstration program by a separate financial account to commercialize and create demand for drone traffic management technologies. The MOLIT initiated the K-Drone Demonstration Program (UTM pilot program) in 2021 to showcase the UTM operational concepts and UTM capabilities as well as to develop business models for the industry. As shown in Table 7, a total of seven operators were selected and supported in three operational areas: near-airport operation, urban operation, and long distance/marine operation. In 2022, the MOLIT is conducting demonstrations of seven operators in five fields: discovering urban flight routes, near airports and national facilities, operation in public sector, commercial operation, etc.
Table 7.
7 operators in 2021 K-Drone Demonstration Program.
4.4. Results
From 2018, meaningful research results were derived through a total of 10 flight demonstrations in various environments. First, the UTM architecture, provided functions and services were defined, and operational procedures were derived based on this. Through established operational procedures, flight demonstrations were conducted based on the UTM system, and continuous modifications and supplements were made. Secondly, considering the environmental factors of Korea, which has a strong network environment, a flight information module called UTID was developed, and flight demonstration was carried out with it installed in the UAM. It was confirmed that this system can be considered by expanding not only drones, but also the operating environment where the UAM will fly in the future. In addition, when a drone flies through the UTM system, UTTS was developed to provide a service that provides real-time information about drone proximity and geofence approach, as well as leaving the mission area. Lastly, the UTM pilot program was supported using the results of R&D, and it was significant that actual potential USSs participated and received feedback on the utilization of the UTM system to continuously improve the system.
5. Conclusions and Future Challenges
In this paper, the concept and necessity of UTM along with a basic technology for the conversion of drone flights from VLOS to BVLOS were examined. The global UTM trend was examined, and the ConOps, architecture, operational procedure, and flight demonstration were described in detail concerning the current status of UTM R&D in Korea. Korea’s UTM is being developed in two phases. In particular, in the demonstration in June 2022, the FIMS prototype was used as output of the second phase, and it was confirmed that more than 20 drones were flying in multiple regions and monitored by the UTM system.
A UTM architecture was devised in consideration of Korea’s policy, regulation, and geographic environment through a study of UTM trends around the world. In order to test the UTM system developed through R&D, the demonstration was conducted, and the operational procedure for this was established separately for user and manager. Based on the established operational procedure, a scenario was devised to test various cases, and the scenario was verified through a total of 10 flight demonstrations. Flight demonstration was carried out in various environments such as mountain, marine, and urban areas. In particular, a flight demonstration including a UAM was performed in 2020 which was meaningful in that this system can be considered by expanding not only drones, but also the operating environment where the UAM will fly in the future. The operational procedures and system improvements established through flight demonstrations were improved, and supplementation is still in progress.
There are many challenges left for UTM implementation and commercialization, and the following are some challenges that we have to address in the future.
5.1. Government Level UTM ConOps
In the future, a national aviation authority in Korea has to address the government-level UTM ConOps for the practical usage of UTM. While government-level ConOps should offer a goal and be technology-neutral, or a strategy for achieving the goal, UTM ConOps for R&D projects should contain research goals and particular technologies for development. The government must create criteria and standards for at least what type of service USSs provide in order to prepare for the emergence of multiple USSs. Furthermore, it seems necessary to discuss the necessary content and procedures for linking UTM and ATM in the future.
5.2. Regulatory Reform
The Korean government is promoting various policies for the early commercialization of UTM. In 2020, when enacting the Act on Promotion of Drone Utilization and Establishment of Infrastructure, regulations on the definition, establishment and operation of the UTM system were included so that public institutions as well as private operators could build and operate the UTM system. The legal basis for the collection of fees and the designation and operation of drone flight routes was also prepared. In 2021, a new drone classification name system was introduced by reorganizing the classification system based on drone performance and risk. Currently, the Remote ID is not mandatory in Korea; however, it will be implemented in 2024. A standard for the Remote ID communication protocol using the network method is also being proposed.
In addition, in preparation for the commercialization of UTM, regulations for delegating the current standards of UTM operators and the country’s flight approval authority to UTM companies are being prepared. Afterwards, through systematic research and discussion, the reorganization of related systems, such as operation procedures for UTM connected pilots, UTM airspace designation and safety standards, and connection between UTM and UAS Special Flight Permit (COA), which is a special flight approval, is being planned. Furthermore, it is necessary to revise the law to delegate all flight permits, including drones, to private operators from the state which currently has authority.
5.3. Airspace Operation Procedures
In the majority of nations, UTM is being developed with the assumption that it would operate in class G airspace, where there is no traffic service and little manned aircraft activity at low altitude, including operations over populated areas or near airports. Drone operation in locations with high risk and significant active of manned aircraft still needs flight authorization from the aviation authorities, unlike operating in class G airspace where traffic volume is low. Additionally, in order for manned aircraft and drones to share the same airspace, it is necessary for flight approval and real-time traffic information to be shared within the controlled area. It is anticipated that this will be expanded in the future to enable ATM connectivity and urban air transportation.
5.4. AI Technology Convergence
UTM research in Korea is in the development of basic UTM service and FIMS design centered on demonstration sites. At the time of planning the UTM research, the concept of UTM itself was unfamiliar, and rapid technological change was taking place. Due to budget limitations, development of technology using AI such as automatic flight plan generation, risk assessment, flight approval, real-time collision avoidance and rout generation are not included in the research content. Currently, there are many Air Navigation Service Providers (ANSPs), aircraft manufacturers, and USSs based in the IT industry have appeared and are active around the world. In the future, it seems necessary to conduct flexible research in response to rapid technology change.
Author Contributions
Conceptualization, K.J. and S.K. (Songju Kim); investigation, B.J. and S.K. (Seyeon Kim); resources, H.K. and C.K.; writing—original draft preparation, K.J., B.J. and S.K. (Seyeon Kim); writing—review and editing, S.K. (Songju Kim); supervision, H.K. and C.K.; project administration, C.K.; funding acquisition, C.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Korea Agency for Infrastructure Technology Advancement (KAIA) grant funded by the Ministry of Land, Infrastructure and Transport (Grant 22USTR-B127901-06, RS-2017-KA127901).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Appendix A.1. Essential Functions
- USS Registration: Users can register a specific USS to use the UTM service. The user must register the drone, drone owner, pilot and operator with the national aviation authority or USS. According to the granted authority, the USS must verify, maintain, and manage the relevant data such as drone registration information, pilot qualification information, safety certification information and flight approval information.
- Identification and Position Reporting: Users who wish to fly by accessing UTM must report the drone ID that can be identified during flight and the real-time or estimated position of the drone to the USS.
- Geo-Awareness/Geo-fencing: USS can provide information concerning obstacles, no-fly zone, restricted areas and dangerous area around the space to the users for the safe flight of drone. The information may include AIP (Aeronautical Information Publication) or NOTAM (Noticed to Airmen) etc.
- Static Geo-fence: A boundary set in places where drone flight is semi-permanently impossible, such as obstacles on the ground, mountainous terrain, no-fly zones, and restricted areas.
- Dynamic Geo-fence: A boundary that is temporarily set for the flight of a drone with a time interval (the existence of a start time and an end time); UVR is a representative example of a dynamic geo-fence.
- Spatial Information: USS provides users with data information such as topographic maps, buildings, and obstacles for safe operation of drones. Spatial information includes 3-D information of drones connected to the UTM system, and can be the basis for setting geo-fences.
- Flight/Mission Planning: Users can connect to the UTM system and establish flight plans electronically. In this case, the flight plan may include departure and arrival time & location, flight altitude, emergency response plan, emergency landing point, flight purpose, flight pattern, waypoint, means of communication, etc.
- Flight Authorization & Clearance: Aviation authority (or USS if entrusted) may approve flight plans in consideration of meteorological conditions, flight risk, flight of other drones and manned aircraft, flight area, obstacles, etc. In addition, flight clearance can be granted through automatic flight clearance function after automatically evaluating flight route overlap and flight risk for the submitted flight plan.
- Airspace Authorization: If separate approval for airspace is required, the USS may request permission from airspace manager on behalf of the user, and if permission is obtained, it may notify the user.
- Separation and De-confliction: USS can provide users with the following services to prevent collisions with other vehicles and obstacles.
- -
- Strategic Deconfliction: Figure out possible collisions with other flying objects and obstacles, and provide separation information when submitting a flight plan.
- -
- Conformance Monitoring: Real-time monitoring whether the flying drone is properly following the planned flight path and area.
- -
- Collision Advisory and Warning: Provides advice and warnings on the possibility of drone collision and avoidance information through real-time monitoring.
- -
- Tactical Deconfliction: Provides information to check the real-time possibility of collision during the flight and change the speed, altitude and direction as necessary.
- Takeoff & Landing Clearance: USS grants takeoff and landing clearance to drones that wish to fly according to an approved flight plan.
- Emergency Response: When an emergency situation occurs, the USS shall notify the user and relevant stakeholders of the emergency situation and take prompt action. In addition, traffic managers of USS should cooperate and support users in case of emergency, and share and warn users of the surrounding airspace.
- Airspace Capacity Management: For efficient drone flight, the USS calculates the capacity of the airspace in which the user flies in consideration of environmental conditions, and based on this, USS can control the density of drone flight in the airspace.
- Communication Service: The USS must provide a system to communicate with the USS and the pilot and/or other drones.
- Surveillance and Tracking: The USS can provide the real-time location of the drone to other users, USS, FIMS, etc. Where necessary or permitted by law, the USS may provide flight and personal information to relevant stakeholders.
- Accident and Incident Reporting: the USS must report the relevant details to the aviation authorities when an accident occurs while the user’s drone is flying.
- Legal Recording: the USS can collect and store the information generated by users while the user operates the drone to a minimum, in accordance with the Personal Information Protection Act.
- Weather Information: The USS can provide real-time low-altitude weather information and forecasts for the area where the drone intends to fly from an authority that provides weather information to users.
- Traffic Information: the USS can provide information about other flights in nearby airspace that users should be aware of. Traffic information may include related information such as manned aircraft, bird movement, etc.
- USS Network: USS can establish a network that enables mutual information exchange traffic information with other USS and respond to emergency situations.
Appendix A.2. Optional Functions
- Risk Assessment & Route Optimization: USS can provide users with estimates of risks from the ground and air based on their flight plans. In addition, USS can provide an optimal route when a specific user’s flight plan risk is high or when flight plans overlap with other users.
- Digital Logbook: For the convenience of users, the USS can collect and store information on parts replacement, inspection & maintenance, and other matters for drone life-cycle management.
- 3-D Map: the USS can provide users with a 3D map of the space they want to fly in during flight planning.
- Communication Network Map: USS can provide users with a network map that embodies the range and strength of communication services that can be provided while flying a drone in 3D (latitude, longitude, altitude) information.
- Advisory of Law and Rules regarding Air: USS can provide users with law and rule information, and advice for flying drones.
- Emergency Contact Network: USS can provide users with a contact network of all relevant organizations in preparation for an emergency situation.
- Infrastructure Provision: USS can provide users with infrastructure and facility services when flying drones. This refers to infrastructure facilities and services that are additionally provided such as take-off and landing sites and emergency landing points for smooth flight of drones.
- Noise Mitigation Service: the USS can provide users with an acceptable noise level in the time and space the drone is intended to fly.
- Electro-Magnetic Interference Information: For the safe flight of drones, the USS can provide users with electromagnetic interference information due to radio navigation signals or other signals in the relevant area at the stage of flight planning stage or during flight.
- Liability Insurance Service: the USS can act on behalf of users to sign up for insurance services for personal and property damage caused by drones to third parties.
- Discovery Service: the USS can provide services together with other USSs that provide UTM service in the airspace where the user wants to fly.
References
- Unmanned Airspace. The Market for UAV Traffic Management Services-2020–2024 Edition 3.02; Unmanned Publications Ltd.: Hove, UK, 2020. [Google Scholar]
- Jiang, T.; Geller, J.; Ni, D.; Collura, J. Unmanned Aircraft System traffic management: Concept of operation and system architecture. Int. J. Transp. Sci. Technol. 2016, 5, 123–135. [Google Scholar] [CrossRef]
- ICAO (International Civil Aviation Organization). Unmanned Aircraft Systems Traffic Management (UTM)-A Common Framework with Core Principles for Global Harmonization Edition 3; International Civil Aviation Organization: Montreal, QC, Canada, 2021. [Google Scholar]
- Kim, S. The Basis of Future Drone Transportation UTM. ICT Express 2020, 36, 19–23. [Google Scholar]
- Kopardekar, P.; Rios, J.; Prevot, T.; Johnson, M.; Jung, J.; Robinson, J. Unmanned Aircraft System Traffic Management (UTM) Concept of Operations to Safely Enable Low Altitude Flight Operations. In Proceedings of the 16th AIAA Aviation, Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Johnson, M.; Jung, J.; Rios, J.; Mercer, J.; Homola, J.; Prevot, T.; Mulfinger, D.; Kopardekar, P. Flight Test Evaluation of an Unmanned Aircraft System Traffic Management (UTM) Concept for Multiple Beyond-Visual-Line-of-Sight Operations. In Proceedings of the Twelfth USA/Europe Air Traffic Management Research and Development Seminar (ATM2017), Seattle, WA, USA, 27–30 June 2017. [Google Scholar]
- Rios, J.; Mulfinger, D.; Homola, J.; Venkatesan, P. NASA UAS Traffic Management National Campaign Operations across Six UAS Test Sites. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC 2016), Sacramento, CA, USA, 25–29 September 2016. [Google Scholar]
- Rios., J.; Aweiss., A.; Jung., J.; Homola., J.; Johnson., M.; Johnson., R. Flight Demonstration of Unmanned Aircraft System (UAS) Traffic Management (UTM) at Technical Capability Level 4. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event. 15–19 June 2020. [Google Scholar]
- FAA. Unmanned Aircraft Systems (UAS) Traffic Management (UTM) Pilot Program (UPP); Federal Aviation Administration: Washington, DC, USA, 2019. [Google Scholar]
- Gilabert, R.V.; Dill, E.T.; Hayhurst, K.J. SAFEGUARD: Progress and Test Results for A Reliable Independent On-board Safety Net for UAS. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Chakrabarty, A.; Ippolito, C. Autonomous flight for Multi-copters flying in UTM-TCL4+ sharing common airspace. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Jung, J.; Craven, N. Small Unmanned Aircraft System Communications and Navigation Performance (Results and Analysis from NASA′s Unmanned Aircraft System Traffic Management Technical Capability Level 4 Demonstration); NASA: Washington, DC, USA, 2020. [Google Scholar]
- Jung, J.; Nag, S. Automated Management of Small Unmanned Aircraft System Communications and Navigation Contingency. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Jung, J.; Rios, J.; Drew, C.; Modi, H.; Jobe, K. Small Unmanned Aircraft System Off-Nominal Operations Reporting System (Unmanned Aircraft System Traffic Management Technical Capability Level 4 Implementation, Data Collection and Analysis); NASA: Washington, DC, USA, 2020. [Google Scholar]
- Moore, A.; Schubert, M.; Fang, T.; Smith, J.; Rymer, N. Lidar-derived Navigational Geofences for Low Altitude Flight Operations. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020. [Google Scholar]
- Rios, J.; Homola, J.; Craven, N.; Verma, P.; Baskaran, V. Strategic Deconfliction Performance (Results and Analysis from the NASA UTM Technical Capability Level 4 Demonstration); NASA: Washington, DC, USA, 2020. [Google Scholar]
- FAA. Unmanned Aircraft System (UAS) Traffic Management (UTM) Concept of Operations v1.0; Federal Aviation Administration: Washington, DC, USA, 2018. [Google Scholar]
- FAA. Unmanned Aircraft System (UAS) Traffic Management (UTM) Concept of Operations v2.0; Federal Aviation Administration: Washington, DC, USA, 2020. [Google Scholar]
- UTM Field Test (UFT). Available online: https://www.faa.gov/uas/research_development/traffic_management/field_test (accessed on 4 July 2022).
- SJU. U-Space Concept of Operations; SESAR Joint Undertaking: Brussels, Belgium, 2019. [Google Scholar]
- Swiss FOCA. Swiss U-Space ConOps version 1.0; Swiss Federal Office of Civil Aviation: Bern, Switzerland, 2019. [Google Scholar]
- Capitán, C.; Castaño, A.; Capitán, J.; Ollero, A. A framework to handle threats for UAS operating in the U-space. In Proceedings of the 2019 Workshop on RED UAS, Cranfield, UK, 25–27 November 2019. [Google Scholar]
- Development of UAS Traffic Management System (UTM) in Progress. Available online: https://global.jaxa.jp/activity/pr/jaxas/no079/08.html (accessed on 21 July 2022).
- Japanese Pilot Project Tests UTM Environment, Complies with Existing Regulations. Available online: https://www.urbanairmobilitynews.com/utm/japanese-pilot-project-tests-utm-environment-complies-with-existing-regulations/ (accessed on 21 July 2022).
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent Research Progress of Unmanned Aerial Vehicle Regulation Policies and Technologies in Urban Low Altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Shenzhen Hosts Over 2000 Drone Flights a Day after UTM System Launch. Available online: https://www.unmannedairspace.info/urban-air-mobility/shenzhen-hosts-over-2000-drone-flights-a-day-following-introduction-of-city-wide-utm-system/ (accessed on 19 July 2022).
- Australia UTM Commences with Air services Release if its Requirements for a Flight Information Management System. Available online: https://www.airservicesaustralia.com/utm-drones/ (accessed on 18 July 2022).
- Australia UTM Prototype System. Available online: https://dronedj.com/2022/02/01/australia-picks-four-competitors-for-drone-utm-prototype-system/ (accessed on 18 July 2022).
- Singapore UTM Trial. Available online: https://www.onesky.xyz/post/onesky-in-singapore-trialing-a-working-utm-system (accessed on 14 July 2022).
- Singapore UTM Demonstration. Available online: https://insideunmannedsystems.com/singapore-completes-demonstrates-working-utm-system/ (accessed on 14 July 2022).
- Salleh, M.; Chi, W.; Wang, Z.; Huang, S.; Tan, D.; Low, K. Preliminary Concept of Adaptive Urban Airspace Management for Unmanned Aircraft Operations. In Proceedings of the AIAA SciTech Forum, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- GUTMA (Global UTM Association). The Future of Aviation Has Arrived! The Next Steps to Build the Drone Service Ecosystem; GUTMA: Lausanne, Switzerland, 2022. [Google Scholar]
- GUTMA (Global UTM Association). Designing UTM for Global Success (Safe, Secure and Efficient Integration of UAS); GUTMA: Lausanne, Switzerland, 2020. [Google Scholar]
- GUTMA (Global UTM Association). UAS Traffic Management Architecture; GUTMA: Lausanne, Switzerland, 2017. [Google Scholar]
- Oh, K.; Koo, S. UTM Development Trends of Major Countries for Operational Safety of Civil UAV. Curr. Ind. Technol. Trends Aerosp. 2017, 15, 78–83. [Google Scholar]
- Koo, S. Concept of Procedural Work Flow in UAS Traffic Management (UTM). In Proceedings of the 2017 KSAS Fall Conference, Jeju, Korea, 15–18 November 2017. [Google Scholar]
- Jang, J.; Kim, S.; Kang, C. A study on Flight Demonstration Scenario for UTM Phase 2. In Proceedings of the SASE 2021 Spring Conference, Jeju, Korea, 28–31 July 2021. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).