
A Time Cooperation Guidance for Multi-Hypersonic Vehicles Based on LSTM Network and Improved Artificial Potential Field Method



Abstract
:1. Introduction
2. Formulation of Time Cooperation Problem
2.1. Dynamic Model
2.2. Multiple Constraints during Glide Phase
2.3. The Framework of Time Cooperative Guidance
3. Time Cooperative Guidance Design
3.1. Predictor–Corrector Algorithm for Longitudinal Guidance
3.2. Cooperative Time Decision Based on LSTM Network
| Algorithm 1: Residual Flight Time Prediction |
| 1: randomly generate 4000 ballistic paths by the prediction—correction guidance law and set up data buffering 2: initial LSTM network weight value W, U, and B 3: set 4: for do 5: for do 6: obtain the ballistic data 7: data feature excludes abnormal and normalization 8: update LSTM network parameters by using the Adam algorithm: 9: end for |
3.3. Cooperative Time Control Based on Time Potential Field
4. Simulation Results
4.1. Generation of the Dataset
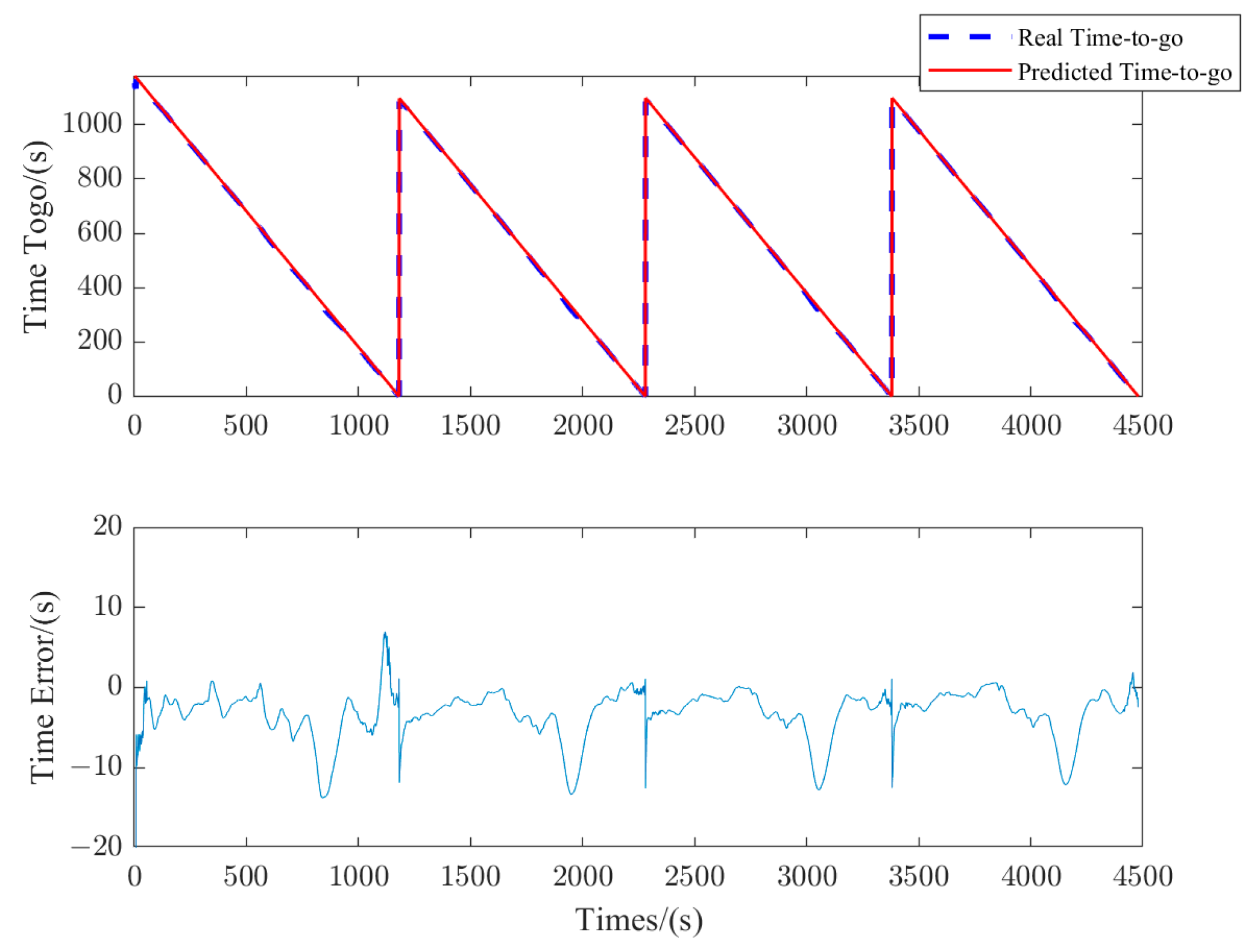
4.2. Training and Testing Process of the LSTM Network
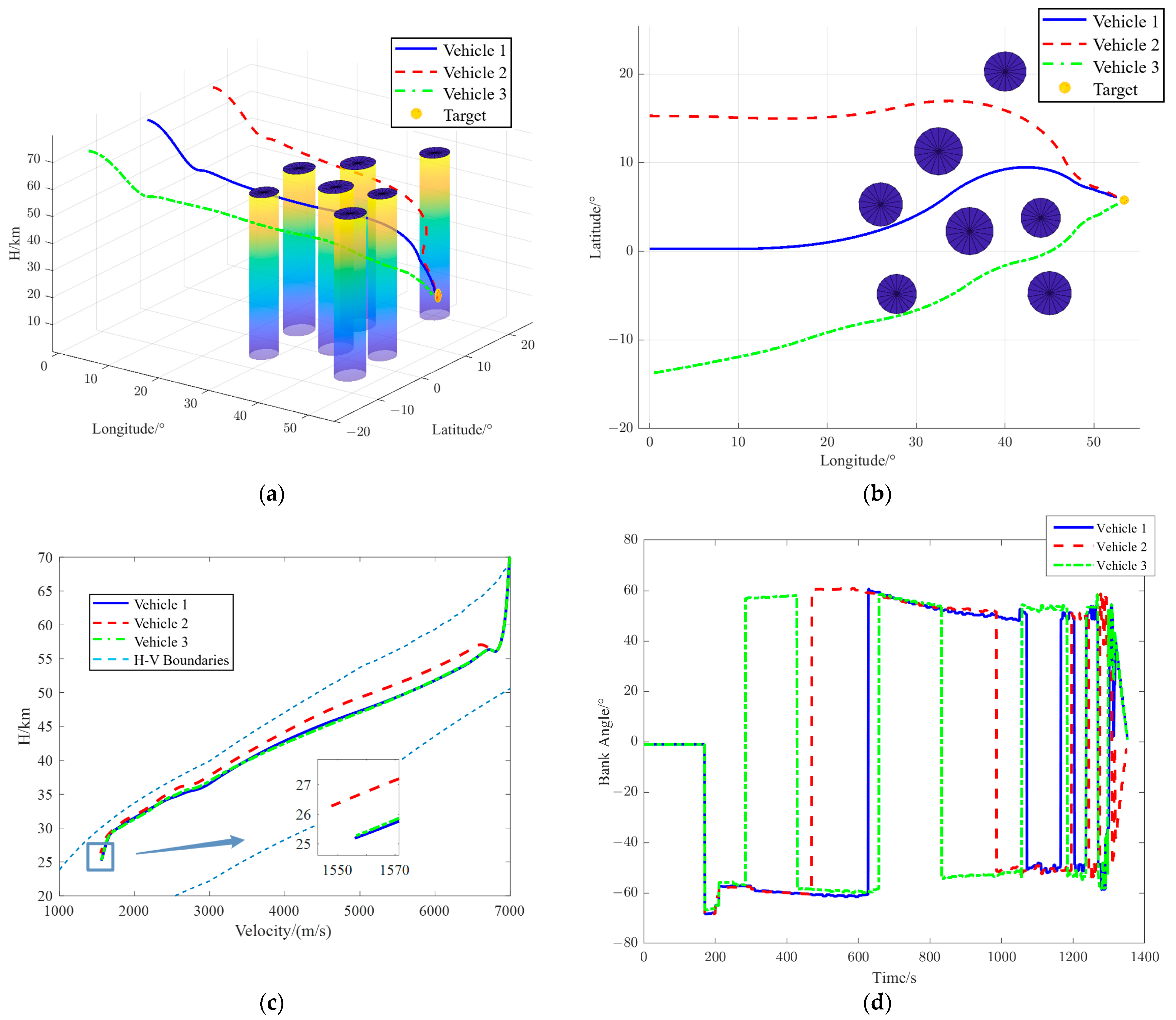
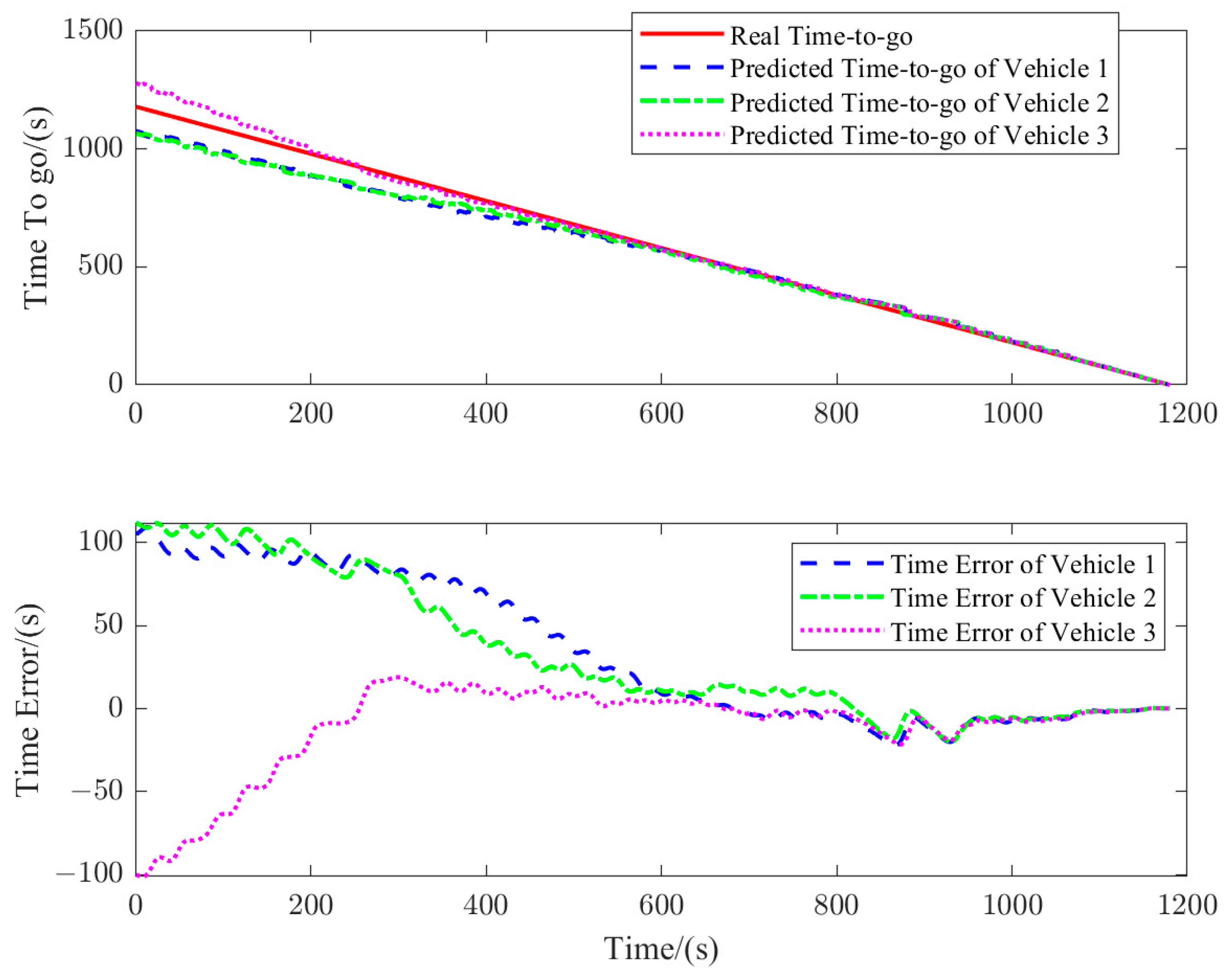
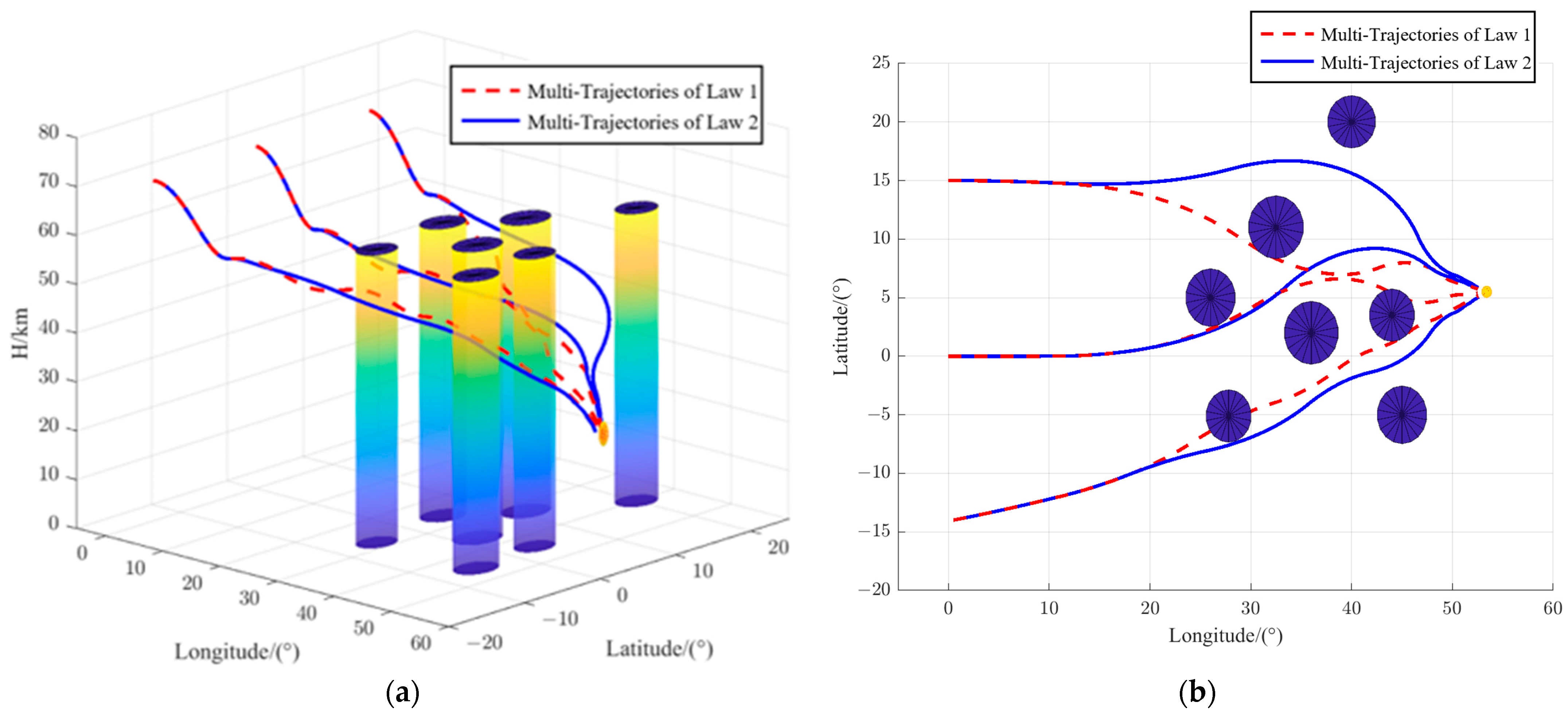
4.3. Multiple Vehicles Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.Z.; Xu, J.L.; Yao, K.J.; Liu, J.L. A new UAV swarm pursuit task scheme driven by DDPG algorithm. Acta Aeronaut. 2020, 41, 32–40. [Google Scholar]
- Luo, Y.; Song, J.; Zhao, K.; Liu, Y. UAV-Cooperative Penetration Dynamic-Tracking Interceptor Method Based on DDPG. Appl. Sci. 2022, 12, 1618. [Google Scholar] [CrossRef]
- Jeon, I.S.; Lee, J.I.; Tahk, M.J. Homing guidance law for cooperative attack of multiple missiles. J. Guid. Control Dyn. 2010, 33, 275–280. [Google Scholar] [CrossRef]
- Yu, J.L.; Dong, X.W.; Li, Q.D.; Ren, Z.; Lv, J.H. Cooperative guidance strategy for multiple hypersonic gliding vehicles system. Chin. J. Aeronaut. 2020, 33, 88–96. [Google Scholar] [CrossRef]
- Yu, W.; Chen, W.; Jiang, Z.; Zhang, W.; Zhao, P. Analytical entry guidance for coordinated flight with multiple no-fly-zone constraints. Aerosp. Sci. Technol. 2018, 84, 273–290. [Google Scholar] [CrossRef]
- Li, Z.; He, B.; Wang, M.; Lin, H.; An, X. Time-coordination entry guidance for multi-hypersonic vehicles. Aerosp. Sci. Technol. 2019, 89, 123–135. [Google Scholar] [CrossRef]
- Li, Z.; Peng, B.; Li, Z.; Chen, H.; Chen, J. Time-coordinated reentry guidance law for reusable launch vehicle. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 7–19 October 2019; IEEE: Beijing, China, 2019. [Google Scholar]
- Cong, M.; Cheng, X.; Zhao, Z.; Li, Z. Studies on Multi-Constraints Cooperative Guidance Method Based on Dis-tributed MPC for Multi-Missiles. Appl. Sci. 2021, 11, 10857. [Google Scholar] [CrossRef]
- Wang, L.; Peng, K.; Zhang, W.; Wang, D. Neural Extended State Observer Based Intelligent Integrated Guidance and Control for Hypersonic Flight. Energies 2018, 11, 2605. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Chai, S.; Xia, Y.; Chen, C.P. Six-DOF Spacecraft Optimal Trajectory Planning and Real-Time Attitude Control: A Deep Neural Network-Based Approach. In IEEE Transactions on Neural Networks and Learning Systems; IEEE: New York, NY, USA, 2019; pp. 5005–5013. [Google Scholar]
- Wang, J.; Wu, Y.; Liu, M.; Yang, M.; Liang, H. A Real-Time Trajectory Optimization Method for Hypersonic Vehicles Based on a Deep Neural Network. Aerospace 2022, 9, 188. [Google Scholar] [CrossRef]
- Sutton, E.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Sagliano, M.; Mooij, E. Optimal drag-energy entry guidance via pseudo-spectral convex optimization. Aerosp. Sci. Technol. 2021, 17, 70–96. [Google Scholar]
- Zhao, K.; Song, J.; Luo, Y.; Liu, Y. Research on Game-Playing Agents Based on Deep Reinforcement Learning. Robotics 2022, 11, 35. [Google Scholar] [CrossRef]
- Harpold, J.C.; Graves, C.A., Jr. Shuttle entry guidance. In Proceedings of the 25th Anniversary Conference, Houston, TX, USA, 30 October–2 November 1978; American Astronautical Society: Houston, TX, USA, 1978; Volume 1, p. 35. [Google Scholar]
- Liang, Z.; Yu, J.; Ren, Z.; Li, Q. Trajectory planning for cooperative flight of two hypersonic entry vehicles. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, China, 6–9 March 2017; AIAA: Reston, VA, USA, 2017; p. 2251. [Google Scholar]
- Zhang, P.; Zhang, X. Multiple missiles fixed-time cooperative guidance without measuring radial velocity for maneuvering targets interception. ISA Trans. 2021, 126, 388–397. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Wang, W.; Lin, D.; Lei, H. Consensus-based two-stage salvo attack guidance. In IEEE Transactions on Aero-Space and Electronic Systems; IEEE: New York, NY, USA, 2018; Volume 54, pp. 1555–1566. [Google Scholar]
- Zhao, J.; Zhou, R.; Dong, Z. Three-dimensional cooperative guidance laws against stationary and maneuvering targets. Chin. J. Aeronaut. 2015, 28, 1104–1120. [Google Scholar] [CrossRef]
- Khatib, O. Real time obstacle Avoidance for manipulation and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Li, Z.; Yang, X.; Sun, X.; Liu, G.; Hu, C. Improved artificial potential field based lateral guidance for waypoints passage and No-fly zones avoidance. Aerosp. Sci. Technol. 2019, 86, 119–131. [Google Scholar] [CrossRef]
- Hu, Y.; Gao, C.; Li, J.; Jing, W.; Chen, W. A novel adaptive lateral reentry guidance algorithm with complex distributed no-fly zones constraints. Chin. J. Aeronaut. 2021, 35, 128–143. [Google Scholar] [CrossRef]
- Fang, K.; Zhang, Q.; Ni, K.; Cheng, L.; Huang, Y. Time-coordinated reentry guidance law for hypersonic vehicle. Acta Aeronaut. Astronaut. Sin. 2018, 39, 321958. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value Range |
|---|---|
| Initial height | 65–75 km |
| Initial velocity | 6500–7500 m/s |
| Initial path angle | −5–5° |
| Initial heading angle | 80–90° |
| Corridor width | 2–20° |
| Initial longitude and latitude [,] | (−20° E–20° E), (−20° N–20° N) |
| Terminal longitude and latitude [,] | (60° E–70° E), (−5° N–5° N) |
| No-Fly Zone | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Position | 36° E, 2° N | 26° E, 5° N | 32.5° E, 11° N | 44° E, 3.5° N | 27.8° E, 5.1° N | 45° E, −5° N | 40° E, 20° N |
| Radius/km | 300 | 275 | 300 | 250 | 250 | 275 | 250 |
| Vehicles | Height (km) | Velocity (m/s) | Longitude (°) | Latitude (°) | Flight Path Angle (°) | Heading Angle (°) | Flight Time Range (s) |
|---|---|---|---|---|---|---|---|
| Vehicle 1 | 70 | 7000 | 0 | 15 | 0 | 90 | 1222–1400 |
| Vehicle 2 | 70 | 7000 | 0 | 0 | 0 | 90 | 1212–1389 |
| Vehicle 3 | 70 | 7000 | 0.5 | −14 | 0 | 80 | 1312–1522 |
| Terminal constraints | 25 | 1550 | 55.4 | 5.5 | - | - | - |
| Vehicle | Vehicle 1 | Vehicle 2 | Vehicle 3 | |||
|---|---|---|---|---|---|---|
| Guidance Law | Law 1 | Law 2 | Law 1 | Law 2 | Law 1 | Law 2 |
| Terminal height (km) | 25.3 | 25.2 | 25.4 | 25.3 | 25.2 | 25.1 |
| Terminal velocity (m/s) | 1554.5 | 1555.2 | 1552.1 | 1553.5 | 1555.0 | 1555.2 |
| Coordinated time (s) | 1325 | 1350 | 1325 | 1350 | 1325 | 1350 |
| Actual arrival time (s) | 1291 | 1351 | 1310 | 1350 | 1338 | 1349 |
| Time error (s) | −34 | +1 | −15 | 0 | +13 | −1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Xu, X.; Tong, X.; Zhao, K. A Time Cooperation Guidance for Multi-Hypersonic Vehicles Based on LSTM Network and Improved Artificial Potential Field Method. Aerospace 2022, 9, 562. https://doi.org/10.3390/aerospace9100562
Song J, Xu X, Tong X, Zhao K. A Time Cooperation Guidance for Multi-Hypersonic Vehicles Based on LSTM Network and Improved Artificial Potential Field Method. Aerospace. 2022; 9(10):562. https://doi.org/10.3390/aerospace9100562
Chicago/Turabian StyleSong, Jia, Xiaowei Xu, Xindi Tong, and Kai Zhao. 2022. "A Time Cooperation Guidance for Multi-Hypersonic Vehicles Based on LSTM Network and Improved Artificial Potential Field Method" Aerospace 9, no. 10: 562. https://doi.org/10.3390/aerospace9100562
APA StyleSong, J., Xu, X., Tong, X., & Zhao, K. (2022). A Time Cooperation Guidance for Multi-Hypersonic Vehicles Based on LSTM Network and Improved Artificial Potential Field Method. Aerospace, 9(10), 562. https://doi.org/10.3390/aerospace9100562