
Stellar Angle-Aided Pulse Phase Estimation and Its Navigation Application


Abstract
1. Introduction
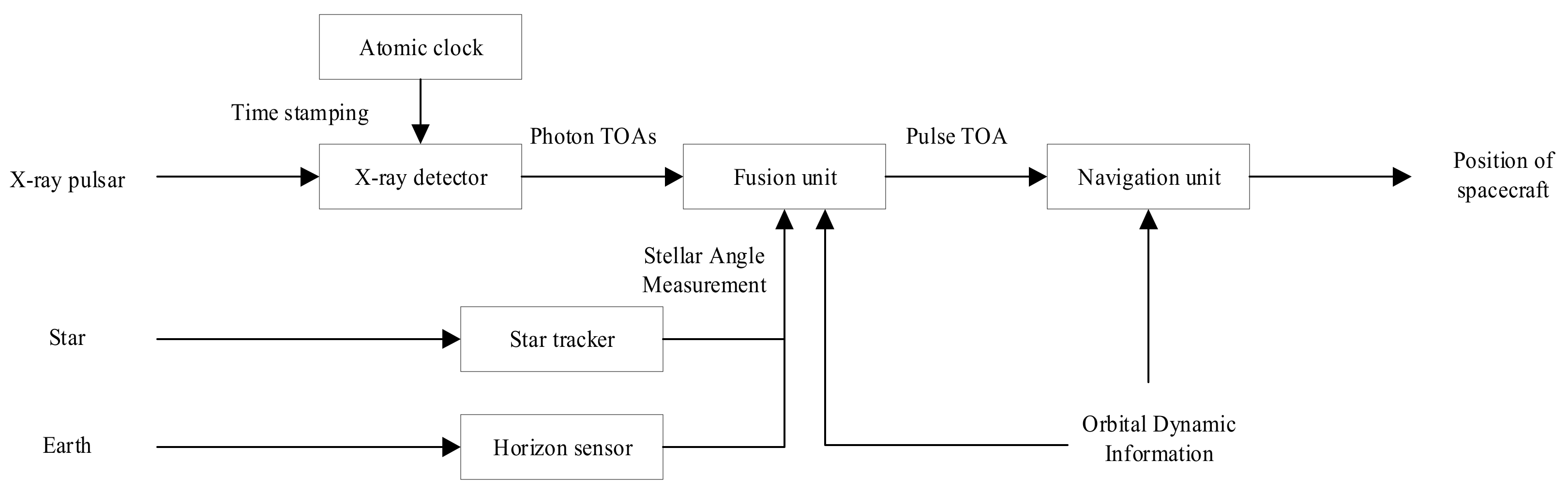
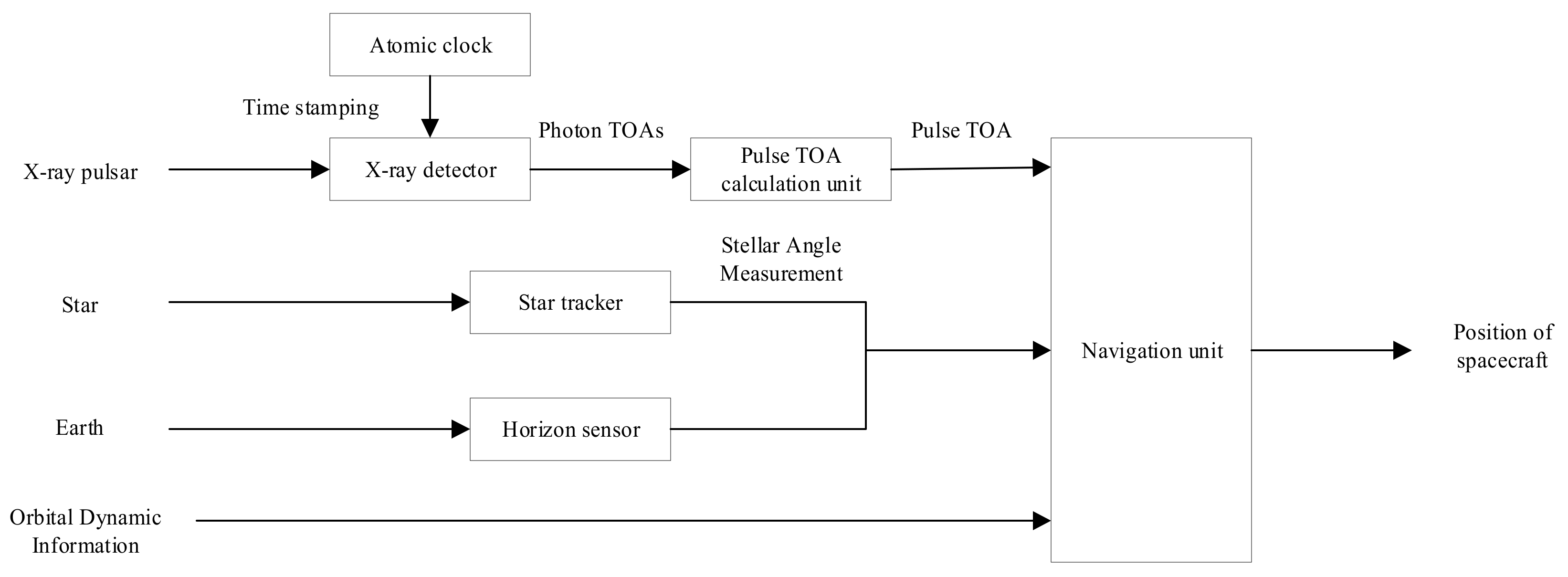
2. Overall Design of the Deeply Integrated Navigation System
3. Relevant Works of Pulse Phase Estimation
3.1. Principle of Pulse Phase Estimation
3.2. Epoch Folding Method
4. Stellar Angle Measurement-Aided Pulse Phase Estimation Method
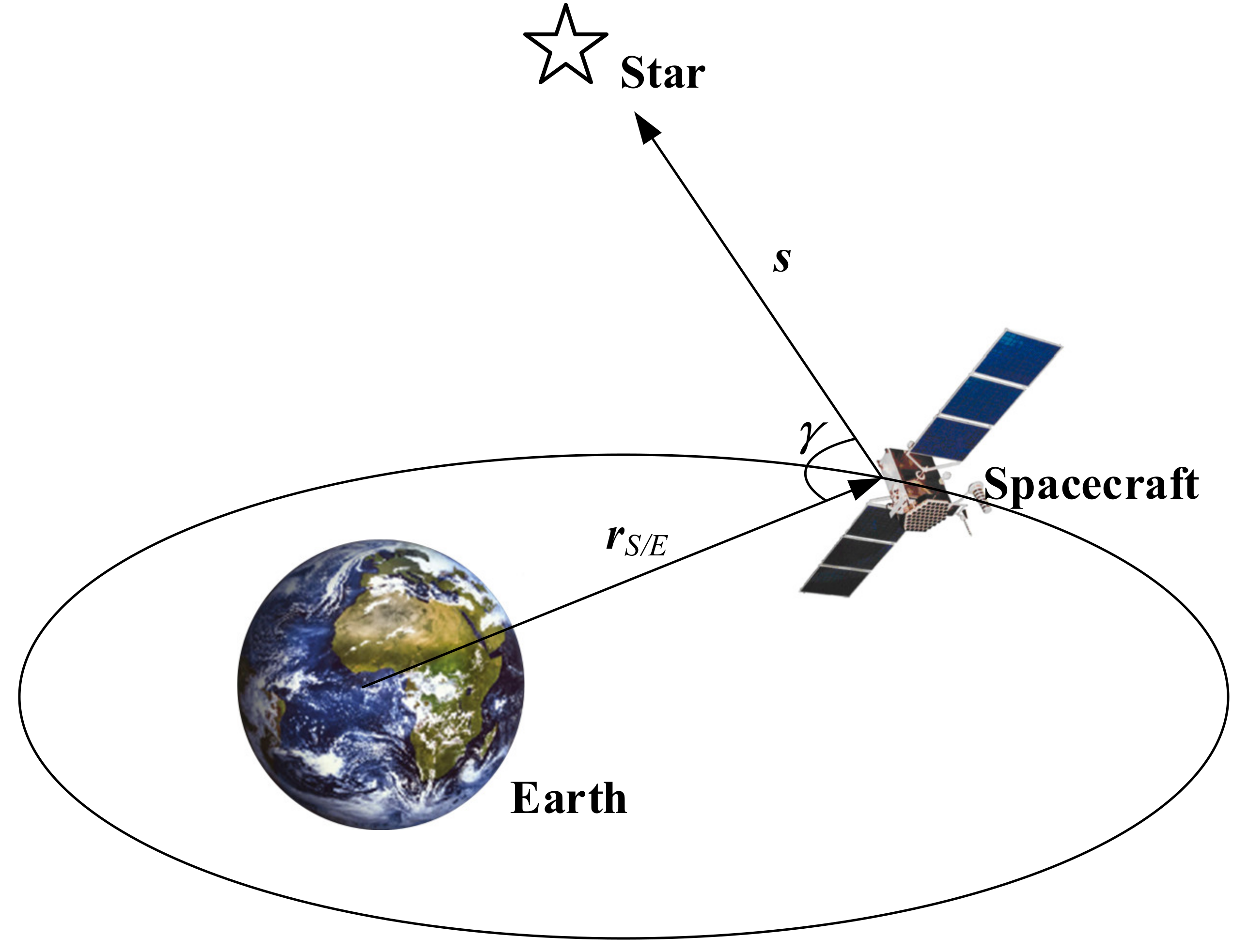
4.1. Position Estimation by Stellar Angle Measurement
4.2. Stellar Angle Measurement-Aided Phase Propagation Model
4.3. Summary of the Stellar Angle Measurement-Aided Pulse Phase Estimation Method
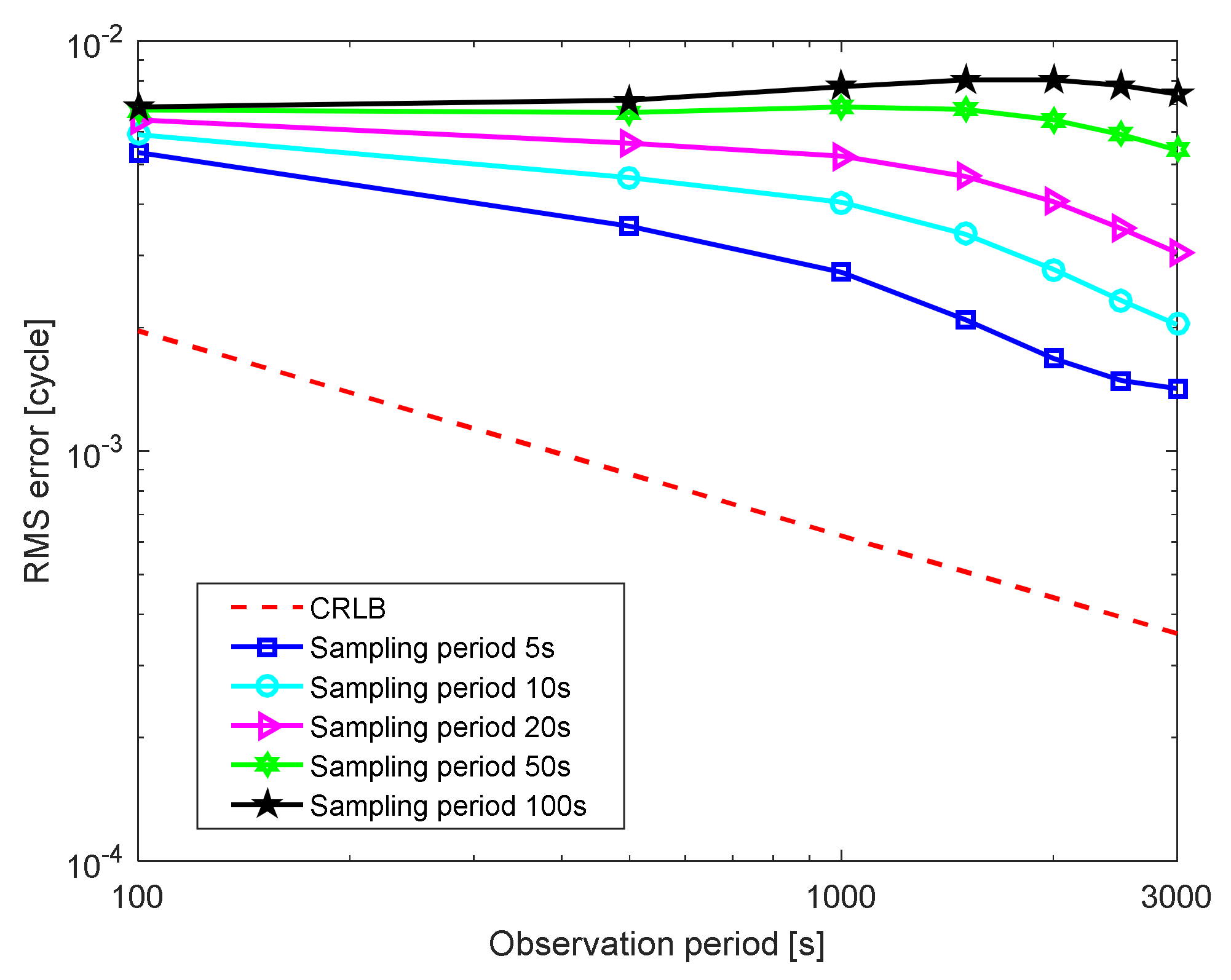
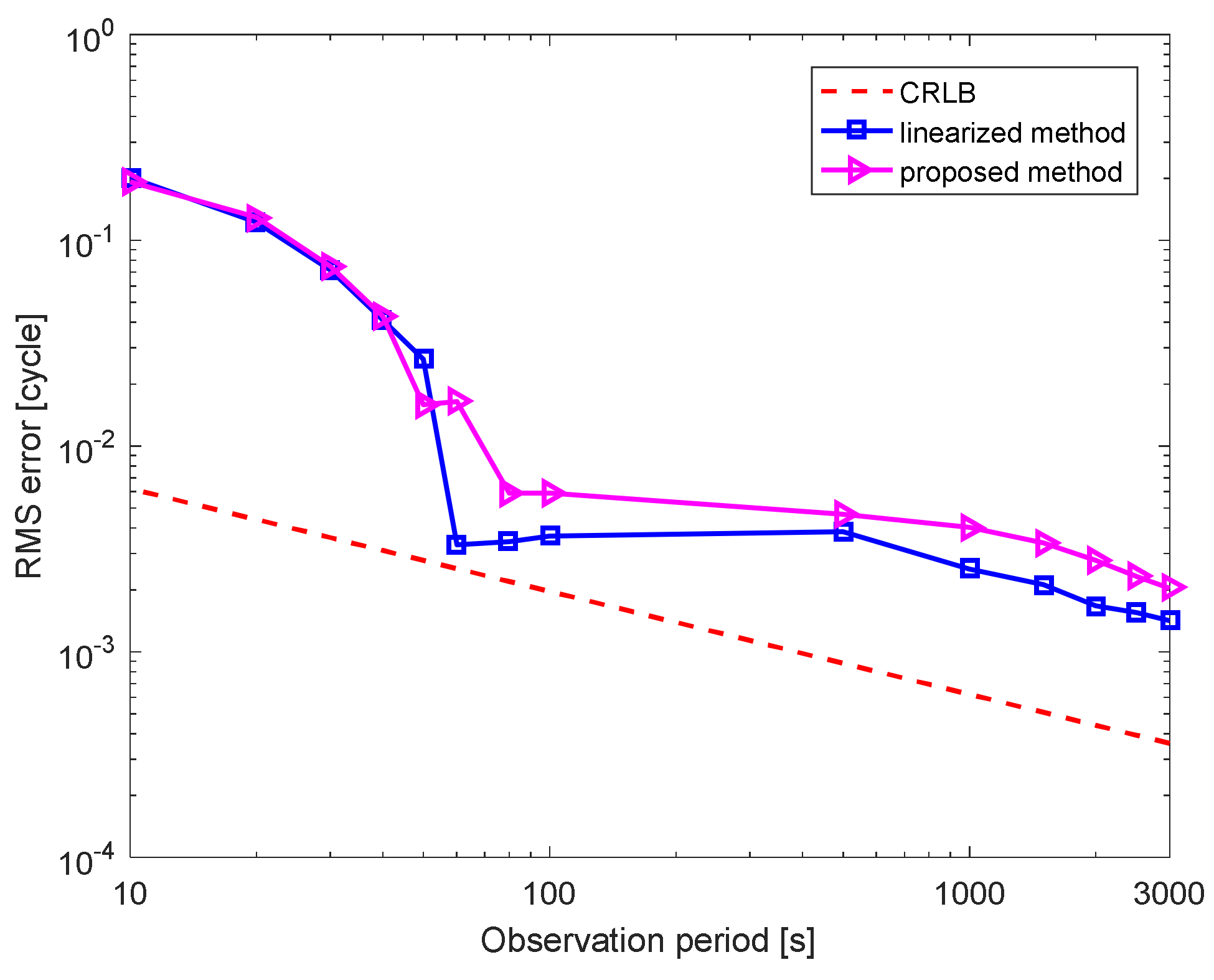
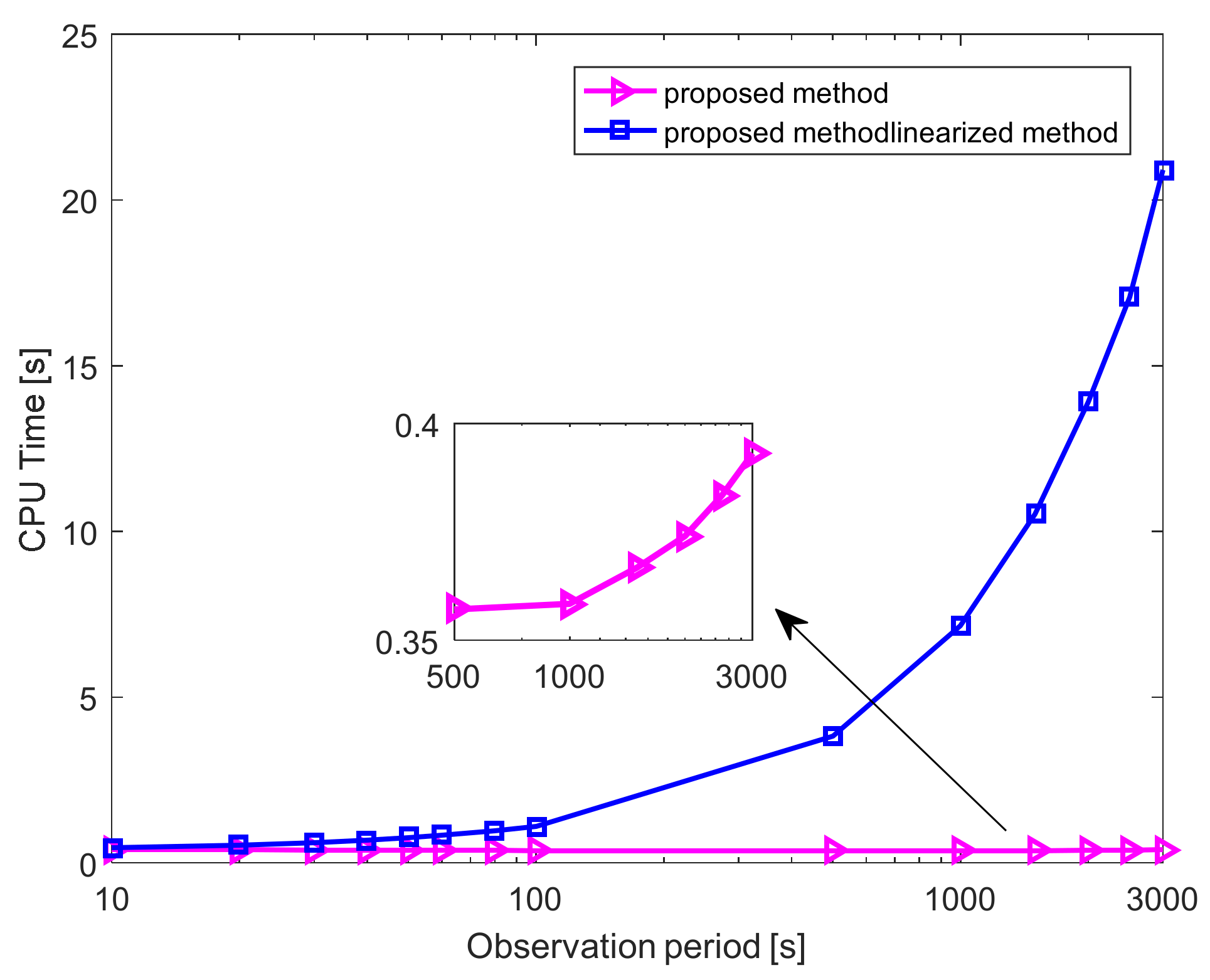
4.4. Accuracy of the Stellar Angle Measurement-Aided Phase Estimation
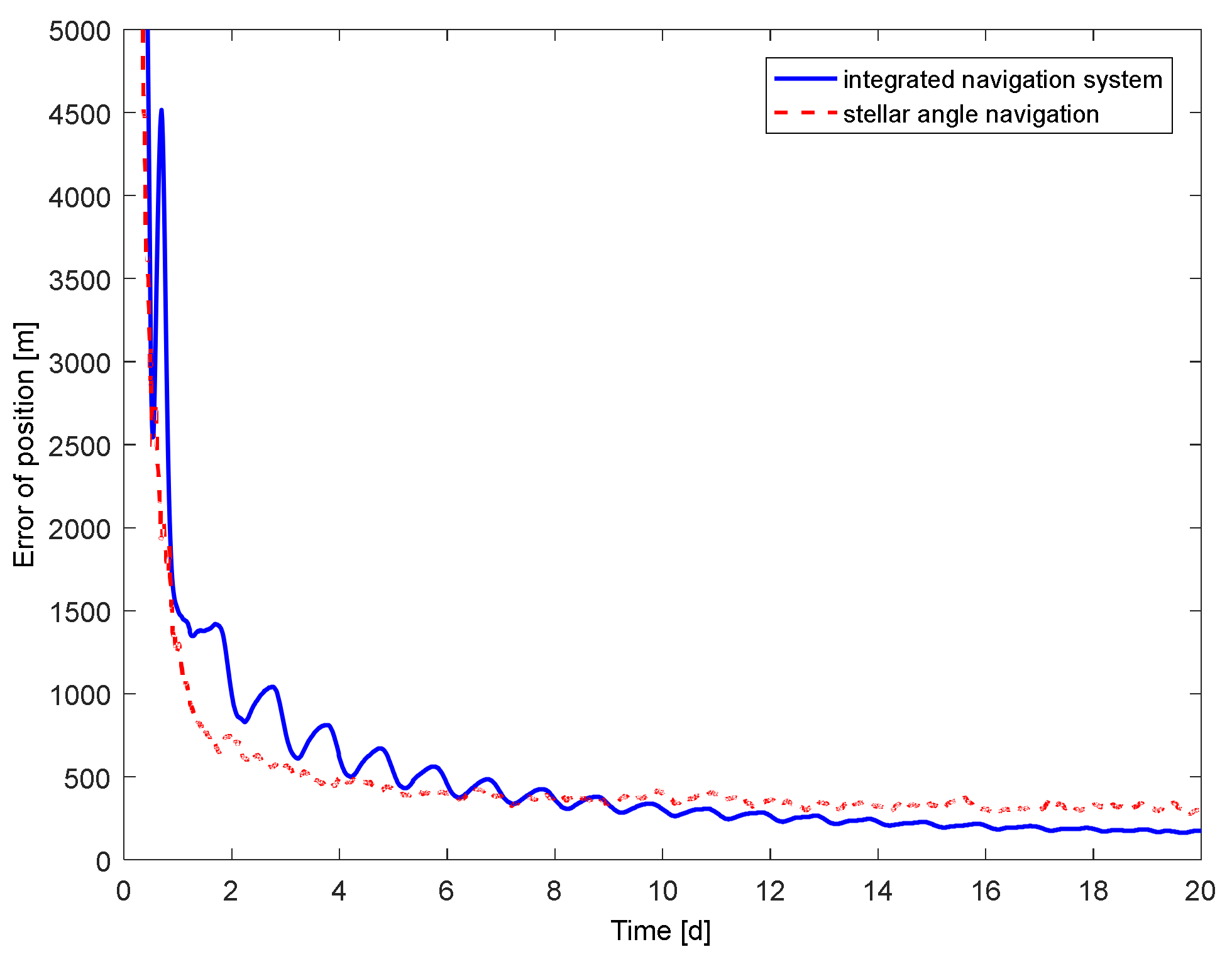
5. Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, W.; Wang, Y. Introduction. In X-ray Pulsar-Based Navigation: Theory and Applications; Springer: Singapore, 2020; pp. 1–24. [Google Scholar] [CrossRef]
- Zhang, X.; Shuai, P.; Huang, L.; Chen, S.; Xu, L. Mission Overview and Initial Observation Results of the X-Ray Pulsar Navigation-I Satellite. Int. J. Aerosp. Eng. 2017, 2017, 8561830. [Google Scholar] [CrossRef]
- Gao, G.X.; Sgammini, M.; Lu, M.; Kubo, N. Protecting GNSS Receivers From Jamming and Interference. Proc. IEEE 2016, 104, 1327–1338. [Google Scholar] [CrossRef]
- Ning, X.; Fang, J. An autonomous celestial navigation method for LEO satellite based on unscented Kalman filter and information fusion. Aerosp. Sci. Technol. 2007, 11, 222–228. [Google Scholar] [CrossRef]
- Schrogl, K.-U. Space traffic management: The new comprehensive approach for regulating the use of outer space—Results from the 2006 IAA cosmic study. Acta Astronaut. 2008, 62, 272–276. [Google Scholar] [CrossRef]
- Marzioli, P.; Gianfermo, A.; Frezza, L.; Amadio, D.; Picci, N.; Curianò, F.; Pancalli, M.G.; Vestito, E.; Schachter, J.; Szczerba, M.; et al. Usage of Light Emitting Diodes (LEDs) for improved satellite tracking. Acta Astronaut. 2021, 179, 228–237. [Google Scholar] [CrossRef]
- McKnight, D. A practical perspective on Space Traffic Management. J. Space Saf. Eng. 2019, 6, 101–107. [Google Scholar] [CrossRef]
- Sheikh, S.I.; Pines, D.J.; Ray, P.S.; Wood, K.S.; Lovellette, M.N.; Wolff, M.T. Spacecraft Navigation Using X-Ray Pulsars. J. Guidance Control Dyn. 2006, 29, 49–63. [Google Scholar] [CrossRef]
- Emadzadeh, A.A.; Speyer, J.L. Celestial-Based Navigation: An Overview. In Navigation in Space by X-ray Pulsars; Springer: New York, NY, USA, 2011; pp. 3–12. [Google Scholar] [CrossRef]
- Chester, T.J.; Butman, S.A. Navigation Using X-Ray Pulsars. Telecommun. Data Acquis. Prog. Rep. 1981, 63, 22. [Google Scholar]
- Winternitz, L.M.B.; Hassouneh, M.A.; Mitchell, J.W.; Valdez, J.E.; Price, S.R.; Semper, S.R.; Yu, W.H.; Ray, P.S.; Wood, K.S.; Arzoumanian, Z.; et al. X-ray Pulsar Navigation Algorithms and Testbed for SEXTANT. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar]
- Wang, Y.; Zheng, W.; Sun, S.; Li, L. X-ray pulsar-based navigation using time-differenced measurement. Aerosp. Sci. Technol. 2014, 36, 27–35. [Google Scholar] [CrossRef]
- Mitchell, J.W.; Winternitz, L.B.; Hassouneh, M.A.; Price, S.R.; Semper, S.R.; Yu, W.H.; Ray, P.S.; Wolff, M.T.; Kerr, M.; Wood, K.S.; et al. Sextant X-ray pulsar navigation demonstration: Initial on-orbit results. In Guidance, Navigation, and Control 2018, Pts I-Ii: Advances in the Astronautical Sciences; Walker, C.A.H., Ed.; Springer: Berlin, Germany, 2018; Volume 164, pp. 1229–1240. [Google Scholar]
- Zheng, S.; Ge, M.; Han, D. Test of pulsar navigation with POLAR on TG-2 spacelab. Sci. Sin. Phys. Mech. Astron. 2017, 47, 120–128. [Google Scholar] [CrossRef]
- Zheng, S.; Zhang, S.; Lu, F.; Wang, W.; Gao, Y.; Li, T.; Song, L.; Ge, M.; Han, D.; Chen, Y. In-orbit Demonstration of X-Ray Pulsar Navigation with the Insight-HXMT Satellite. Astrophys. J. Suppl. Ser. 2019, 244, 1–7. [Google Scholar] [CrossRef]
- Emadzadeh, A.A.; Speyer, J.L. X-Ray Pulsar-Based Relative Navigation using Epoch Folding. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2317–2328. [Google Scholar] [CrossRef]
- Emadzadeh, A.A.; Speyer, J.L.; Golshan, A. Asymptotically Efficient Estimation of Pulse Time Delay for X-Ray Pulsar Based Relative Navigation. In AIAA Guidance, Navigation, and Control Conference; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2009. [Google Scholar] [CrossRef]
- Lin, H.; Xu, B. Improving Pulse Phase Estimation Accuracy with Sampling and Weighted Averaging. J. Navig. 2019, 72, 1007–1020. [Google Scholar] [CrossRef]
- Rao, Y.; Kang, Z.; Liu, J.; Ma, X.; Gui, M. High-accuracy pulsar time delay estimation using an FrFT-based GCC. Optik 2019, 181, 611–618. [Google Scholar] [CrossRef]
- Wu, Y.; Kang, Z.; Liu, J. A fast pulse time-delay estimation method for X-ray pulsars based on wavelet-bispectrum. Optik 2020, 207, 163790. [Google Scholar] [CrossRef]
- Kang, Z.; He, H.; Liu, J.; Ma, X.; Gui, M. Adaptive pulsar time delay estimation using wavelet-based RLS. Optik 2018, 171, 266–276. [Google Scholar] [CrossRef]
- Golshan, A.; Sheikh, S. On Pulse Phase Estimation and Tracking of Variable Celestial X-Ray Sources. In Proceedings of the 63rd Annual Meeting of the Institute of Navigation, Cambridge, MA, USA, 23–25 April 2007. [Google Scholar]
- Tran, N.D.; Renaux, A.; Boyer, R.; Marcos, S.; Larzabal, P. Performance Bounds for the Pulse-Phase Estimation of X-Ray Pulsars. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 786–793. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, W.; Zhang, D. X-ray Pulsar/Starlight Doppler Deeply-integrated Navigation Method. J. Navig. 2017, 70, 829–846. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, W. Pulse Phase Estimation of X-ray Pulsar with the Aid of Vehicle Orbital Dynamics. J. Navig. 2016, 69, 414–432. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, W. Pulsar phase and Doppler frequency estimation for XNAV using on-orbit epoch folding. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2210–2219. [Google Scholar] [CrossRef]
- Xue, M.; Li, X.; Fu, L.; Fang, H.; Sun, H.; Shen, L. X-ray pulsar-based navigation using pulse phase and Doppler frequency measurements. Sci. China Inf. Sci. 2015, 58, 1–14. [Google Scholar] [CrossRef]
- Xue, M.; Peng, D.; Sun, H.; Shentu, H.; Guo, Y.; Luo, J.a.; Zhikun, C. X-ray pulsar navigation based on two-stage estimation of Doppler frequency and phase delay. Aerosp. Sci. Technol. 2021, 110, 106470. [Google Scholar] [CrossRef]
- Liu, J.; Ning, X.; Ma, X.; Fang, J.; Liu, G. Direction/Distance/Velocity Measurements Deeply Integrated Navigation for Venus Capture Period. J. Navig. 2018, 71, 861–877. [Google Scholar] [CrossRef]
- Wang, X.; Ju, M.; Chen, B.; Yang, Y. Design and on-orbit evaluation of autonomous orbit determination for MEO satellite based on star sensors and earth sensors. In Proceedings of the 11th China Satellite Navigation Conference, Chengdu, China, 23–25 November 2020. [Google Scholar]
- Wang, Y.; Zheng, W.; An, X.; Sun, S.; Li, L. XNAV/CNS Integrated Navigation Based on Improved Kinematic and Static Filter. J. Navig. 2013, 66, 899–918. [Google Scholar] [CrossRef]
- Ning, X.; Gui, M.; Fang, J.; Liu, G. Differential X-ray pulsar aided celestial navigation for Mars exploration. Aerosp. Sci. Technol. 2017, 62, 36–45. [Google Scholar] [CrossRef]
- Gui, M.; Ning, X.; Ma, X.; Zhang, J. A Novel Celestial Aided Time-Differenced Pulsar Navigation Method Against Ephemeris Error of Jupiter for Jupiter Exploration. IEEE Sens. J. 2019, 19, 1127–1134. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Zhu, H.; Wang, W. Application of UKF Algorithm in Pulsar Based Autonomous Navigation. Flight Control Detect. 2019, 3, 44–50. [Google Scholar]
- Emadzadeh, A.A.; Speyer, J.L. On Modeling and Pulse Phase Estimation of X-Ray Pulsars. IEEE Trans. Signal Process. 2010, 58, 4484–4495. [Google Scholar] [CrossRef]
- Emadzadeh, A.A.; Speyer, J.L. Pulse Delay Estimation Using Epoch Folding. In Navigation in Space by X-ray Pulsars; Springer: New York, NY, USA, 2011; pp. 49–72. [Google Scholar] [CrossRef]
- Rinauro, S.; Colonnese, S.; Scarano, G. Fast near-maximum likelihood phase estimation of X-ray pulsars. Signal Process. 2013, 93, 326–331. [Google Scholar] [CrossRef]
- Qi, Z.; Yang, Z. Integrated Approach combining Doppler Positioning and Celestial Navigation based on UKF. In Proceedings of the 57th International Astronautical Congress, Valencia, Spain, 2–6 October 2006. [Google Scholar] [CrossRef]
- Wang, Y.S.; Wang, Y.D.; Zheng, W. On-Orbit Pulse Phase Estimation Based on CE-Adam Algorithm. Aerospace 2021, 8, 95. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Elements | Spacecraft 1 | Spacecraft 2 | Spacecraft 3 |
|---|---|---|---|
| Inclination/° | 68.8 | 63.2 | 10.4 |
| Semi-major axis/km | 10,028 | 26,571 | 42,200 |
| Eccentricity | 0.0032 | 0.0472 | 0.00151 |
| Right ascension of the ascending node/° | 174.2 | 136.3 | 322.4 |
| Argument of perigee/° | 351.1 | 211.6 | 201.6 |
| Mean anomaly/° | 2.2 | 44.2 | 184.5 |
| Parameters | Value |
|---|---|
| period/ms | 3.05 |
| /ph·s−1 | 1.93 |
| /ph·s−1 | 50 |
| Star | Sirus | Canpus | Arcturus |
|---|---|---|---|
| Declination/° | −16.72 | −52.70 | 19.18 |
| Right ascension/° | 101.29 | 95.99 | 213.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, Y.; Zheng, W.; Song, M.; Li, G. Stellar Angle-Aided Pulse Phase Estimation and Its Navigation Application. Aerospace 2021, 8, 240. https://doi.org/10.3390/aerospace8090240
Wang Y, Wang Y, Zheng W, Song M, Li G. Stellar Angle-Aided Pulse Phase Estimation and Its Navigation Application. Aerospace. 2021; 8(9):240. https://doi.org/10.3390/aerospace8090240
Chicago/Turabian StyleWang, Yusong, Yidi Wang, Wei Zheng, Minzhang Song, and Guanghua Li. 2021. "Stellar Angle-Aided Pulse Phase Estimation and Its Navigation Application" Aerospace 8, no. 9: 240. https://doi.org/10.3390/aerospace8090240
APA StyleWang, Y., Wang, Y., Zheng, W., Song, M., & Li, G. (2021). Stellar Angle-Aided Pulse Phase Estimation and Its Navigation Application. Aerospace, 8(9), 240. https://doi.org/10.3390/aerospace8090240