
A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications


Abstract
:1. Introduction
2. Classification of UAVs
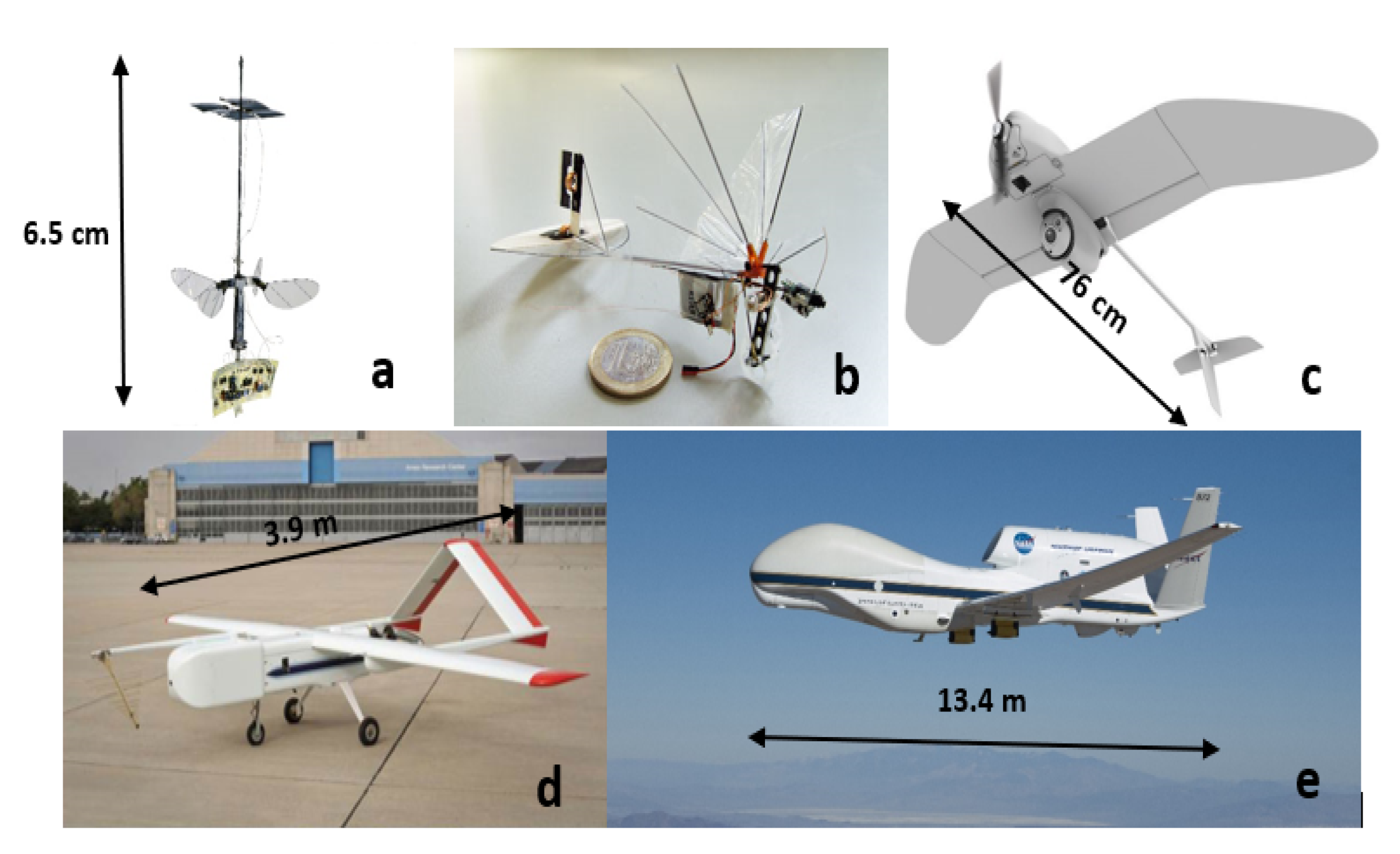
2.1. Size-Based Classification
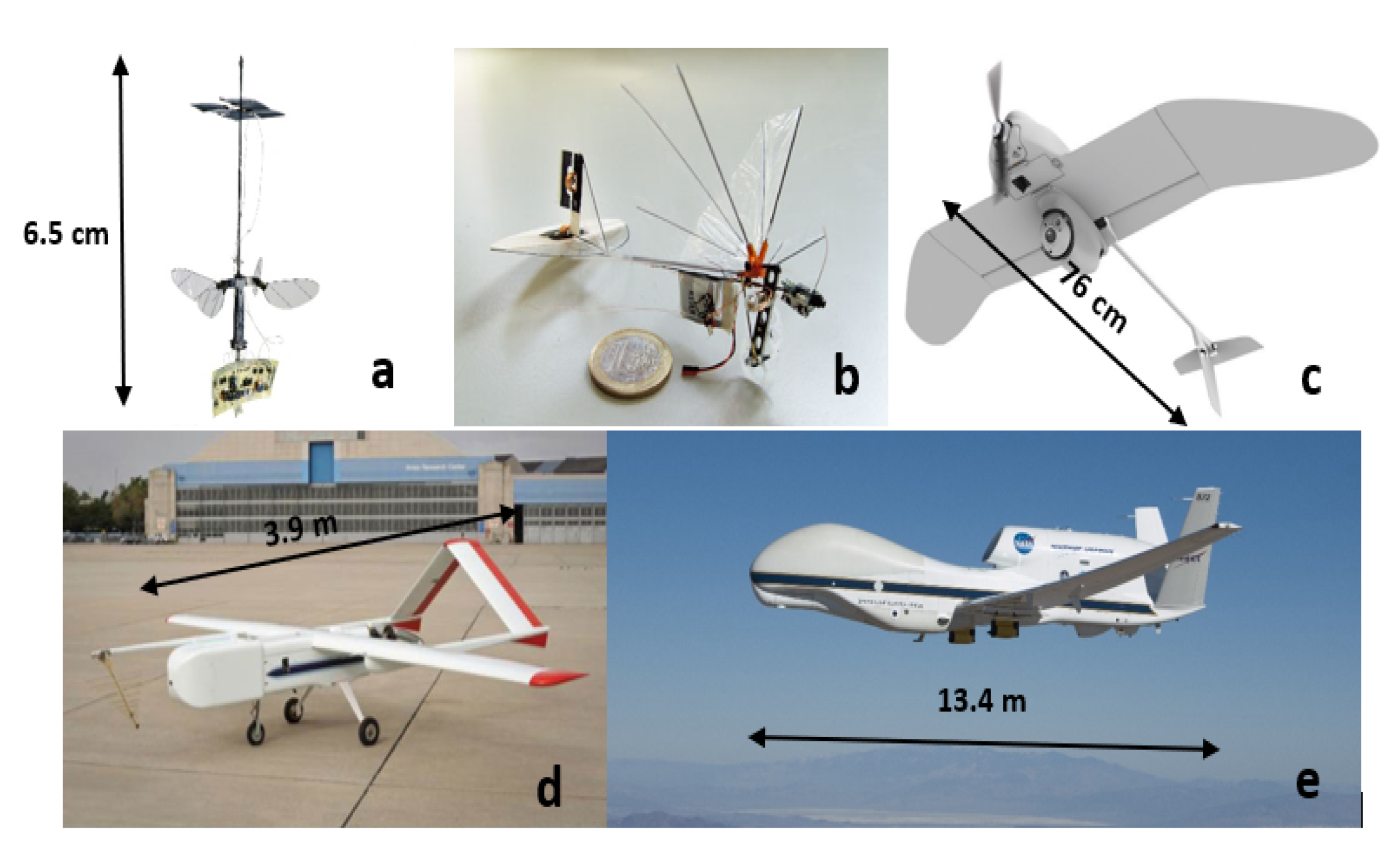
- “Ultra-small UAVs”, which includes NAVs (Nano Aerial Vehicles) with a maximum wingspan length less than 7.5 cm [16]—Robobee X-wing is an example of an NAV with a very small wingspan of 3.5 cm, shown in Figure 2a [17]—and MAVs (Micro Aerial Vehicles) with a length between 7.5 and 15 cm [16]; DelFly Micro is an example of a MAV with a wingspan of 10 cm, shown in Figure 2b [18].
- “Medium UAVs”, which applies to UAVs with a wingspan between 2 and 10 m; NASA SIERRA is an example, with a wingspan of 6.1 m and length of 3.9 m, shown in Figure 2d.
2.2. Range, Endurance, and Altitude
- “Very close-range UAVs” are UAVs with a maximum range of 5 km, usually used by the Marine Corps and the army as a model air vehicle.
- “Tethered UASs” provide power and communication to the UAV through a permanent physical link in the form of a flexible wire or cable. They employ quadcopters or other multicopter UAVs so it can hover. These systems are utilized when the necessary flight endurance is more significant than a free-flying UAV and a small operating area is required. The Orion 2 UAS [22] provides completely automated, continuous airborne surveillance over broad regions during the day and night. It has an endurance length of 24 h per day, which means it can stay in the air indefinitely at altitudes up to 100 m, covering extended ranges to up to 10 km.
- “Close-range UAVs” have a maximum range of 50 km and endurance lengths of 1–6 h depending on the mission; they are mainly required for reconnaissance and surveillance missions.
- “Short-range UAVs” have a maximum range of 150 km and endurance lengths of 8–12 h. They also are required for reconnaissance and surveillance missions.
- “Mid-range UAVs” have a maximum range of 650 km. They are usually required to be ground or air-launched for reconnaissance and surveillance work and the collection of meteorological data.
- “Endurance UAVs” are UAVs that have an endurance of more than 36 h, have a maximum range of 300 km, and can operate from the ground or sea [13].
2.3. Weight-Based Classification
- “Group 1” are hand-launched and portable UAVs. Their missions are reconnaissance, surveillance, and target acquisition. They are lightweight UAVs with MTOW less than 20 pounds and low altitudes less than 396.24 m above ground level (AGL).
- “Group 2” are medium-sized UAVs that can be launched using a catapult, mainly used for reconnaissance, surveillance, and target acquisition. They have MTOW between 20 pounds to 55 pounds, operating at altitudes less than 1066.8 m above ground level. They can carry heavier payloads than “Group 1”, which affects their endurance.
- “Group 3” are larger UAVs than those in “Group 1” and “Group 2”; the majority of these UAVs are used to carry weapons. They do not require an improved runway. Therefore, they are usually used in rough terrains. Their MTOW is less than 1320 pounds, operating at medium altitudes less than 5486.4 m mean sea level (MSL).
- “Group 4” operates at the same altitude as “Group 3”. They are larger than the previous groups. They have MTOW greater than 1320 pounds. They can carry heavier payloads, but they may require improved runways.
- “Group 5” are the largest UAVs, with MTOW greater than 1320 pounds and an altitude of over 5486.4 m mean sea level. They have long range and endurance parameters that allow them to carry out advanced operations, such as wide-area surveillance and penetrating attacks. However, they require enhanced areas for launch and recovery [15].
2.4. Engine Type-Based Classification
2.5. Configuration-Based Classification
2.5.1. Horizontal Take-Off and Landing (HTOL) UAVs
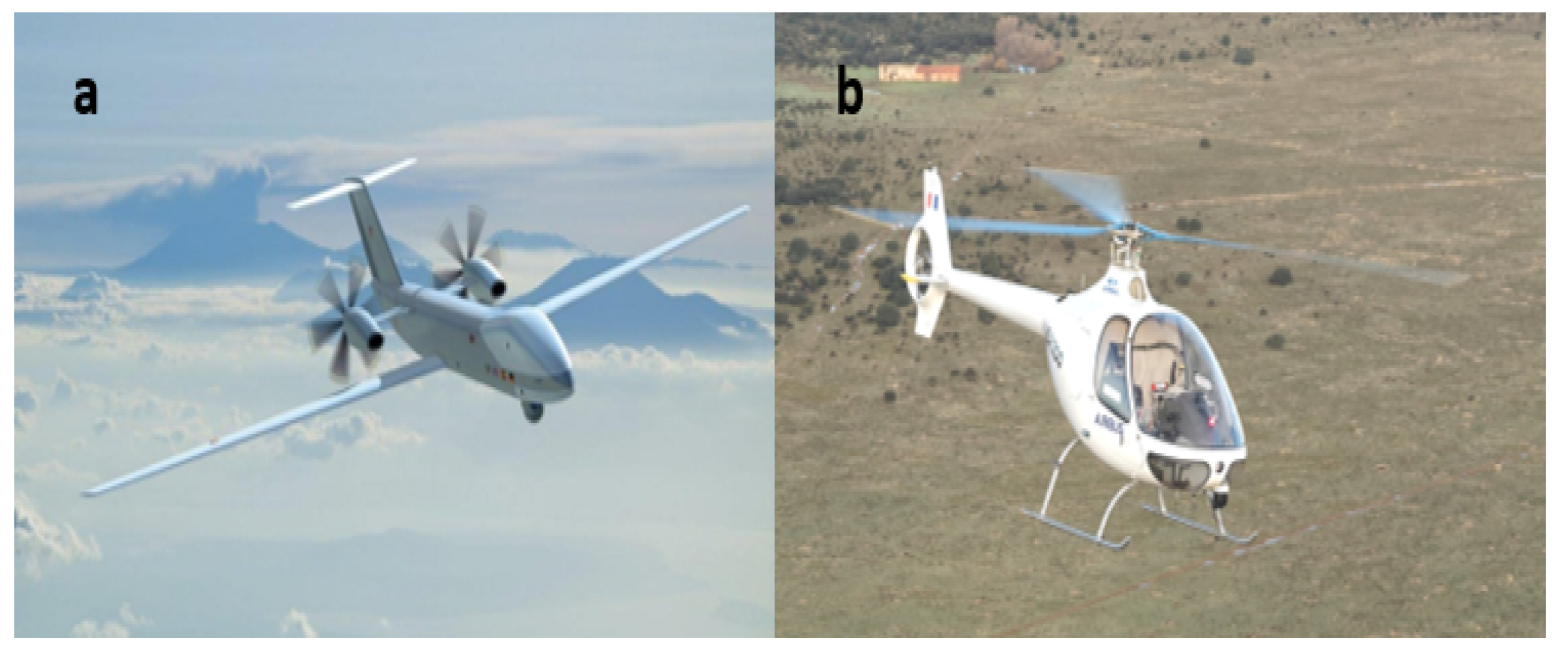
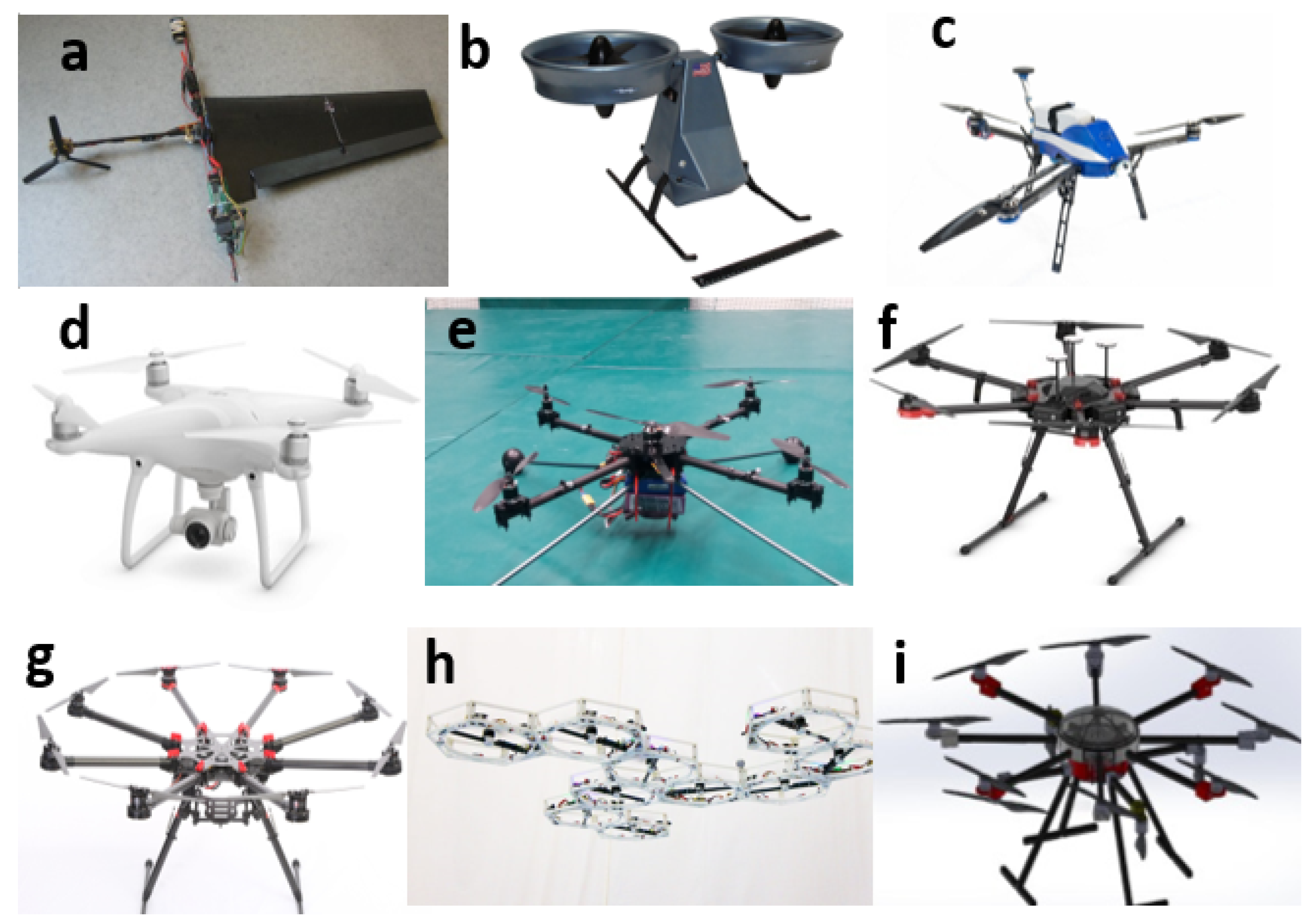
2.5.2. Vertical Take-Off and Landing (VTOL) UAVs
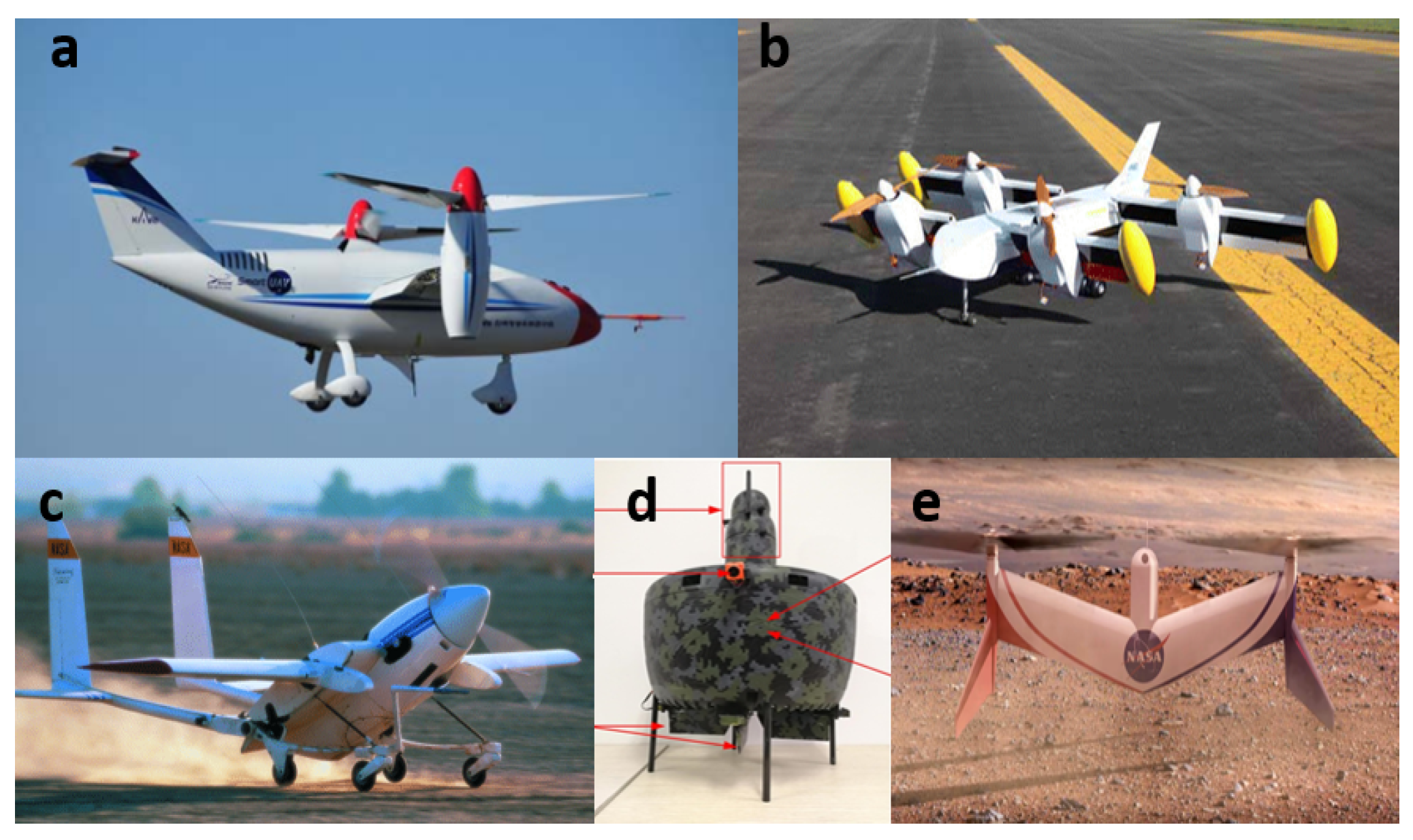
2.5.3. Hybrid UAVs
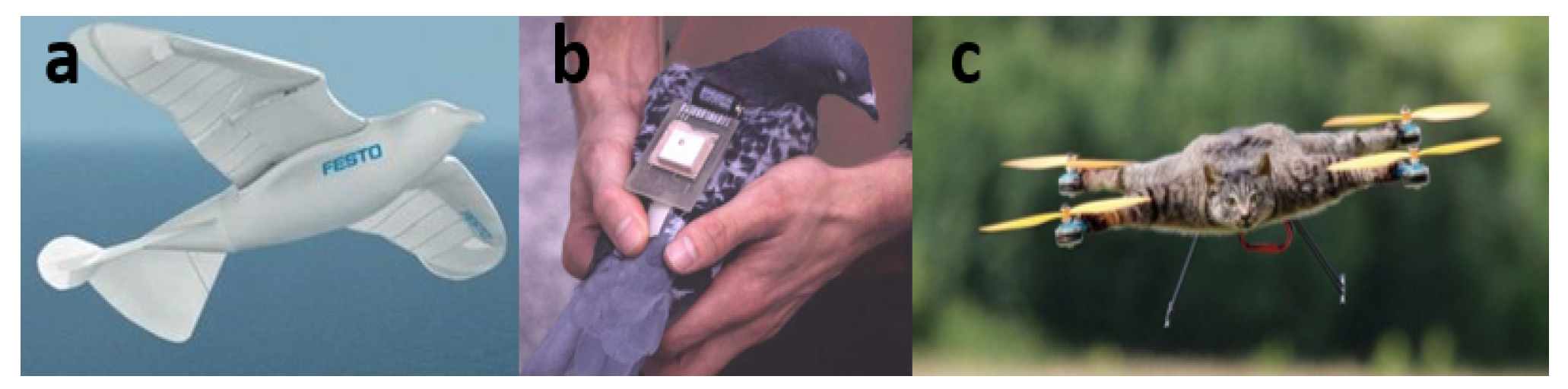
2.5.4. Unconventional UAVs
3. Mechanical Design and Analysis of UAVs
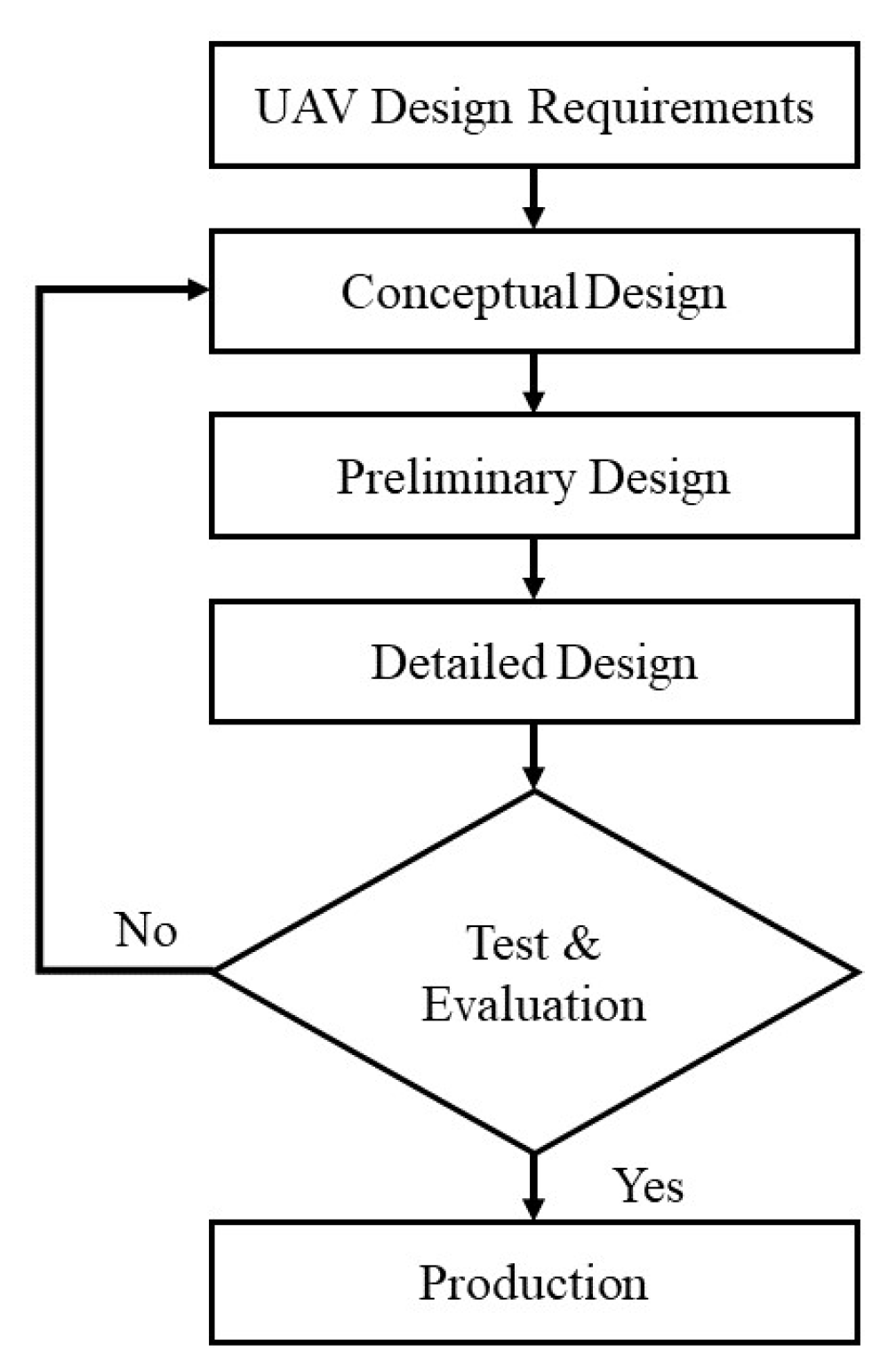
3.1. Design and Analysis of a UAV
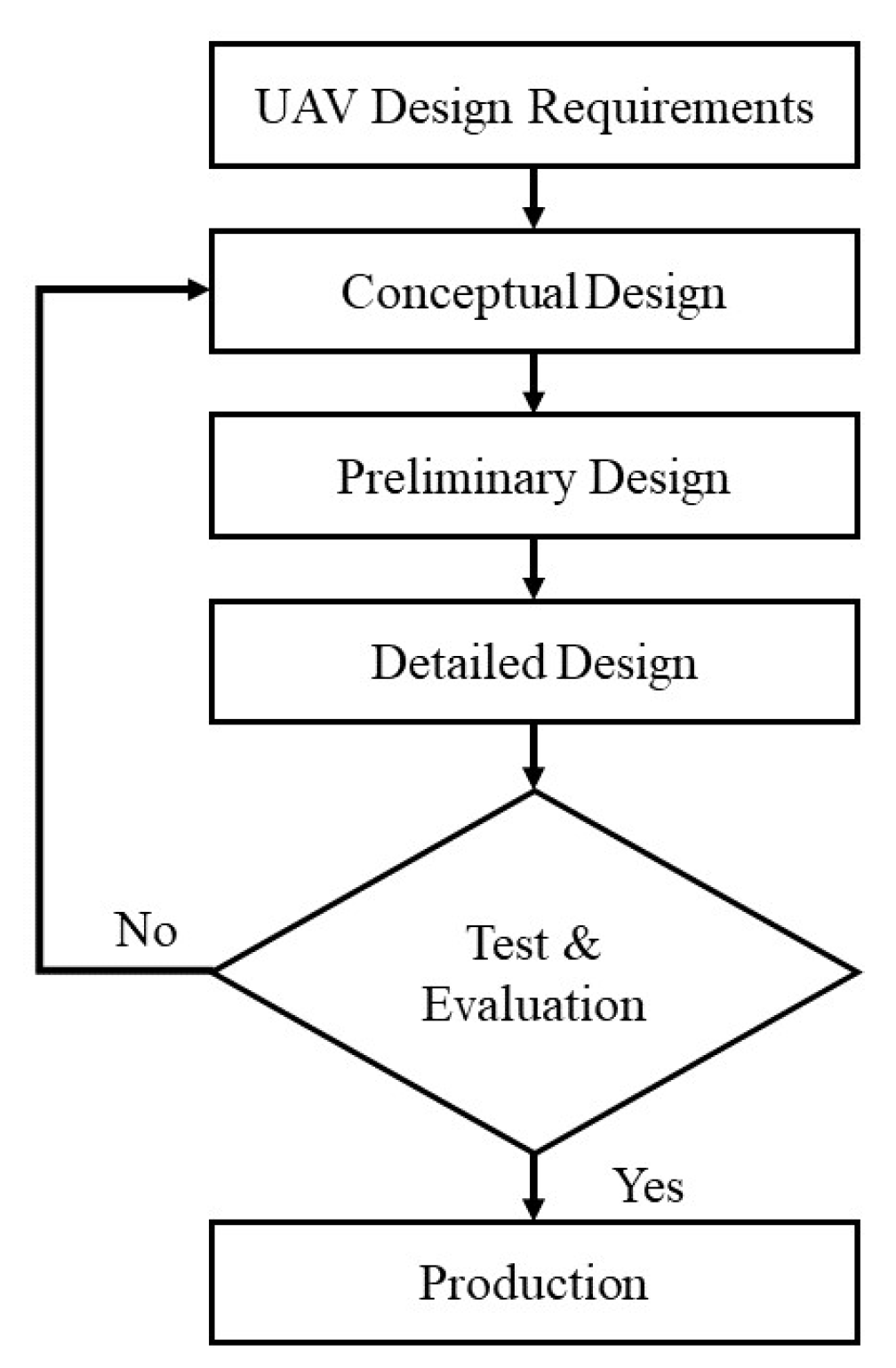
- “Conceptual design”, in which the UAV is designed in the concept of brainstorming ideas and analyzing the advantages and disadvantages of each idea when it comes to implementation without any specific calculations. The design parameters are determined according to the decision-making process and selection technique. A potential design should be presented according to the strengths and weaknesses of each design idea regarding the pre-determined design parameters [21,63].
- “Preliminary design” involves the sketches of the design that should be the outcome of some calculation procedures. Therefore, the parameters determined in this phase are still not final, and they should be adjusted according to the analysis applied and design alteration. However, this step is crucial as the outcome parameters of this step will be used in the detailed design final phase. Therefore, the results of the preliminary design should be accurate.
- “Detailed design” is the final phase in the design process. It involves a detailed overview of every design aspect, including detailed CAD models, simulations, and final characteristics.
3.1.1. Designing a Fixed-Wing UAV
3.1.2. Designing a Rotary-Wing UAV
3.2. Analysis of a UAV
3.2.1. Structural Analysis
3.2.2. Vibration Analysis
3.2.3. Computational Fluid Dynamics Analysis
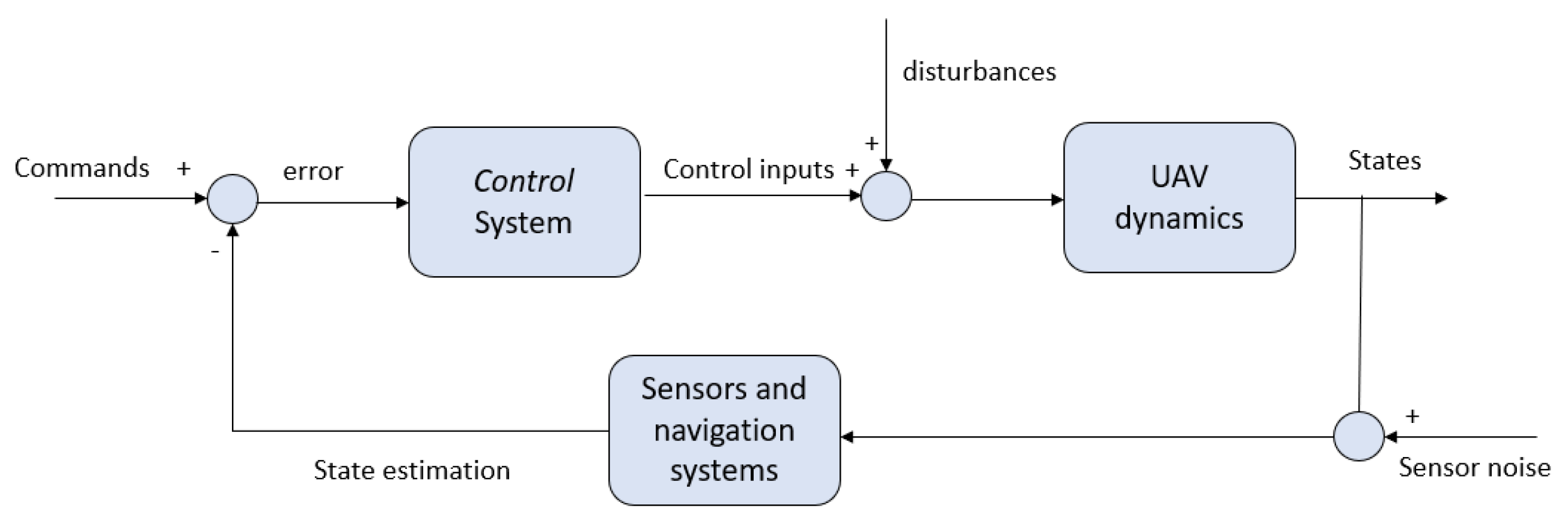
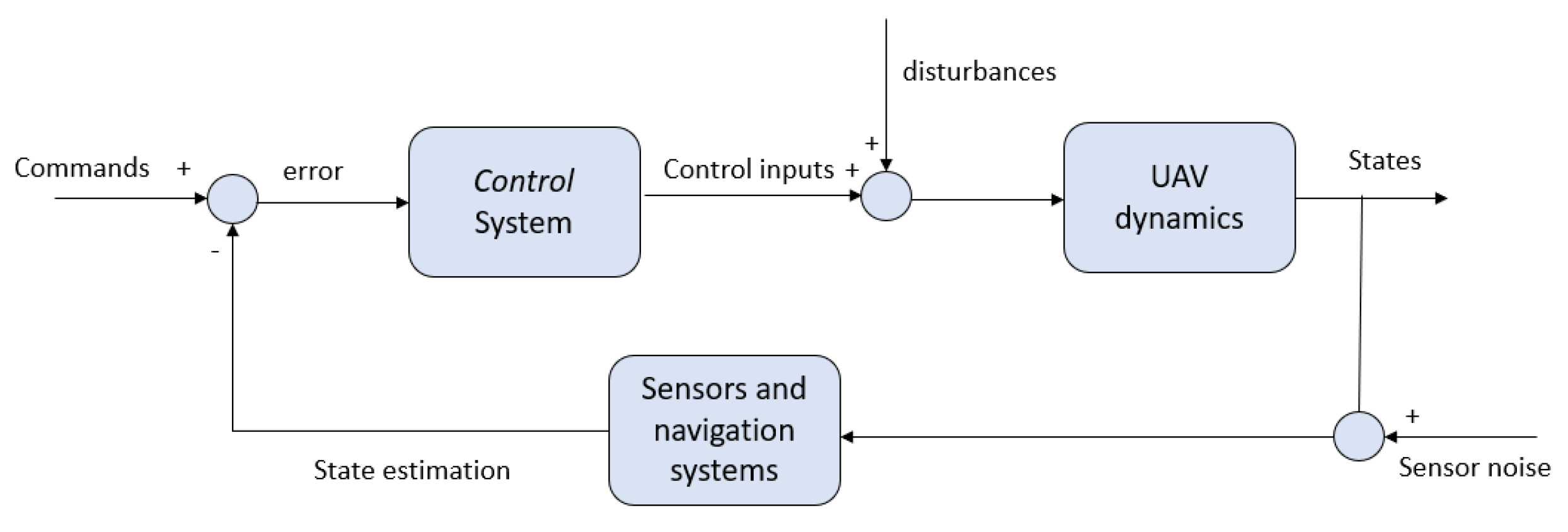
4. Control of UAVS
- A Proportional–Integral–Derivative PID controller, which is one of the most used controllers for UAVs. The controller gains are selected to tune the current state of the UAV to a reference state. Due to their ease of use, they are quite popular for UAVs. However, they have limitations in robustness and optimality [72].
- A Linear Quadratic Regulator LQR controller works in dynamic systems to minimize a suitable cost function. It is considered robust concerning process uncertainty with a substantial stability margin to errors in the loop. However, it requires the full state of the system, which not always possible.
- The H∞ Loop-Forming Method, which integrates robust control with classical loop forming control, has high robustness compared to other methods. However, it can be inefficient for large-scale UAV control.
- The Sliding Mode Controller (SMC) is based on Lyapunov stability principles. It forces the system to slide along a recommended path using a discontinuous control signal. It is insensitive to disturbances, modeling errors, and parametric uncertainties.
- The Backstepping Controller partitions the controller task into several steps to process and gradually stabilize each sub-system. It has a fast convergence of the algorithm, which consumes lower computational resources and deals with external uncertainty.
- Robust Control Algorithms are used to ensure the effectiveness of the controller performance within the acceptable disturbance range.
4.1. Fixed-Wing UAV Controllers
4.2. Muli-Rotor UAV Controllers
5. Applications of UAVS
5.1. Reconnaissance and Surveillance
5.2. Combat
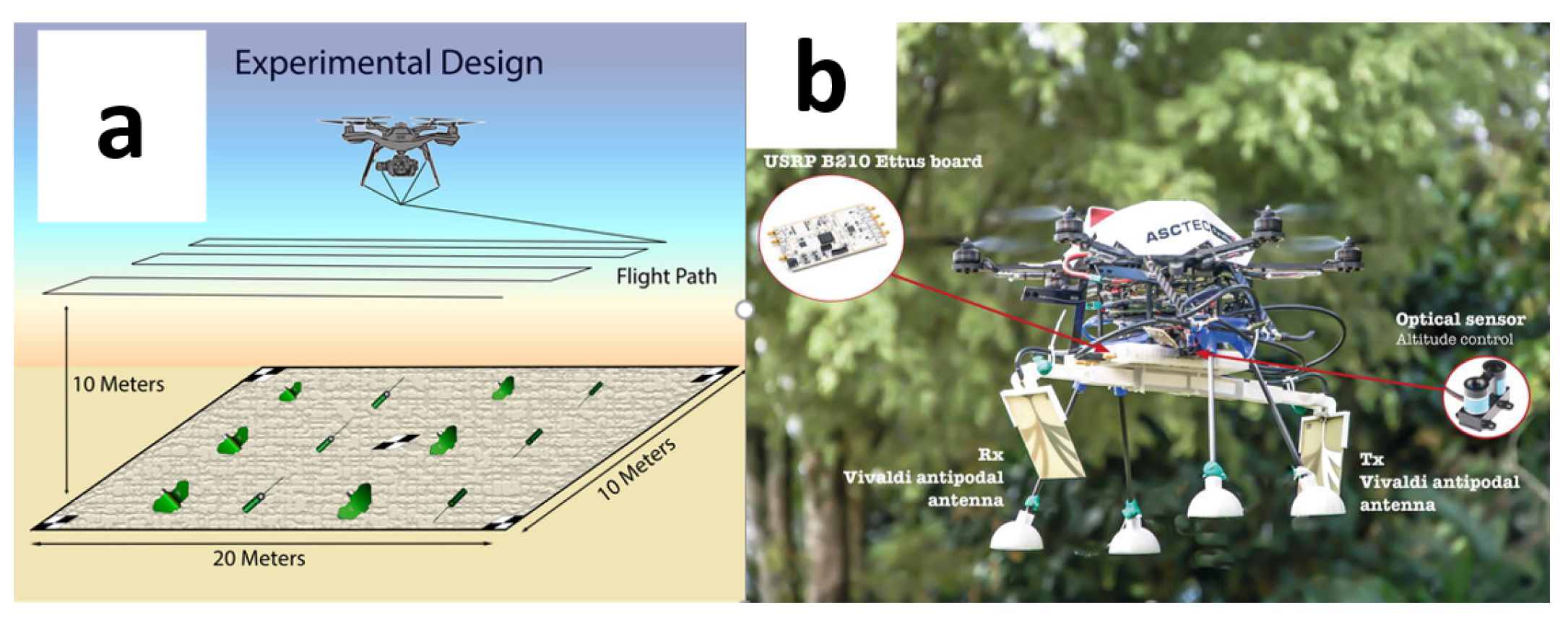
5.3. Humanitarian Demining
5.4. Public Safety
5.5. Construction
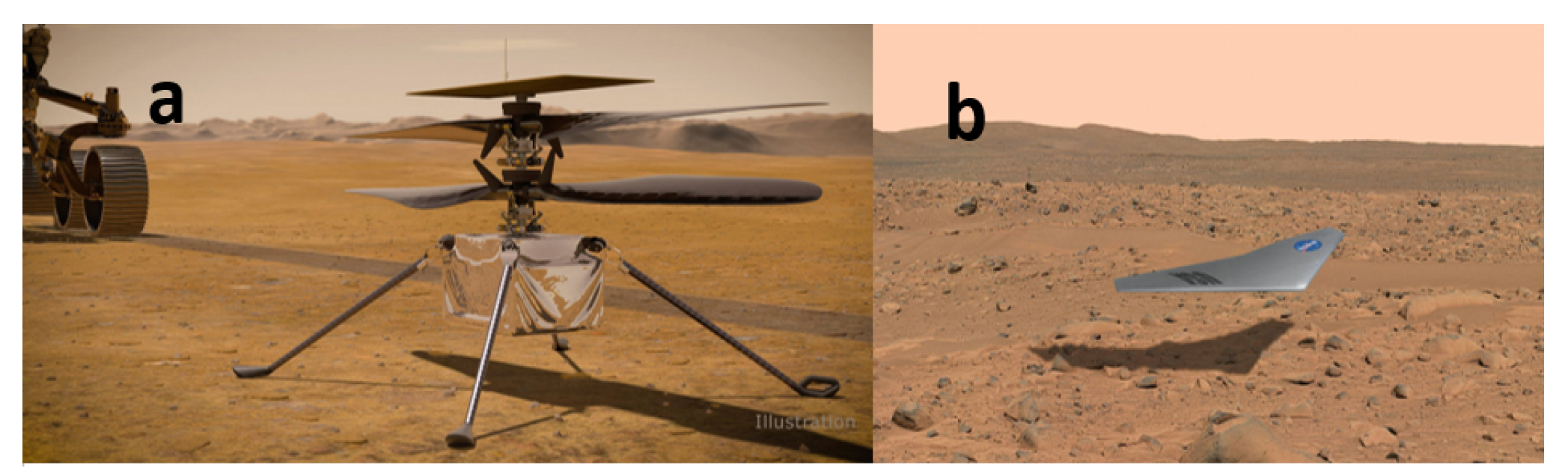
5.6. Planetary Exploration
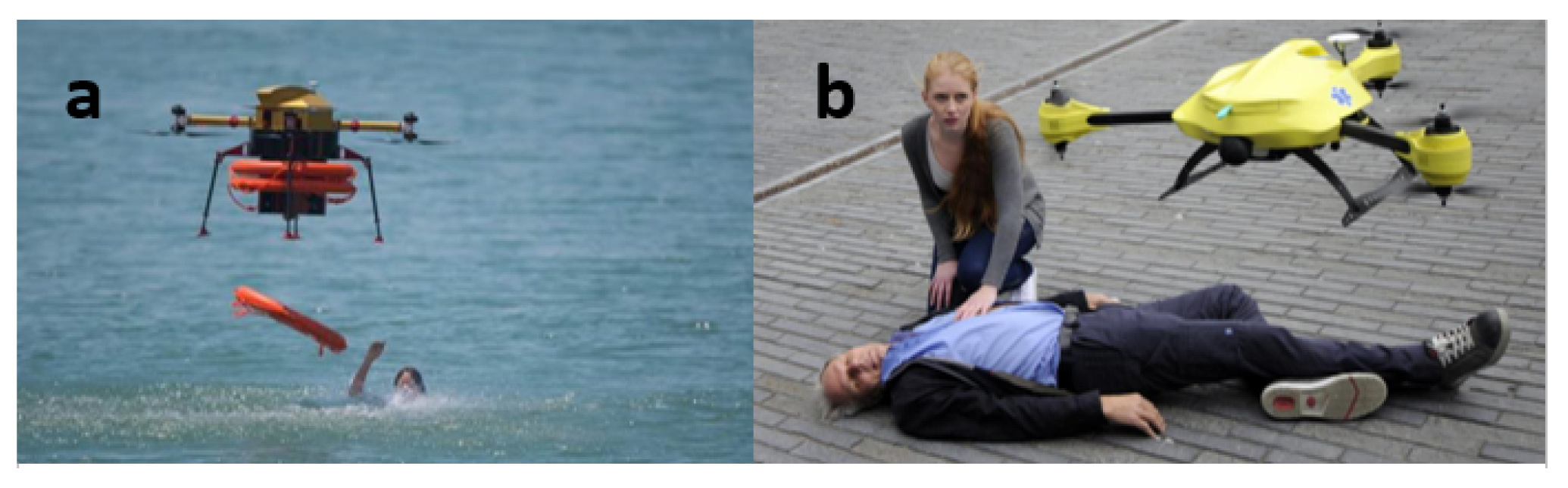
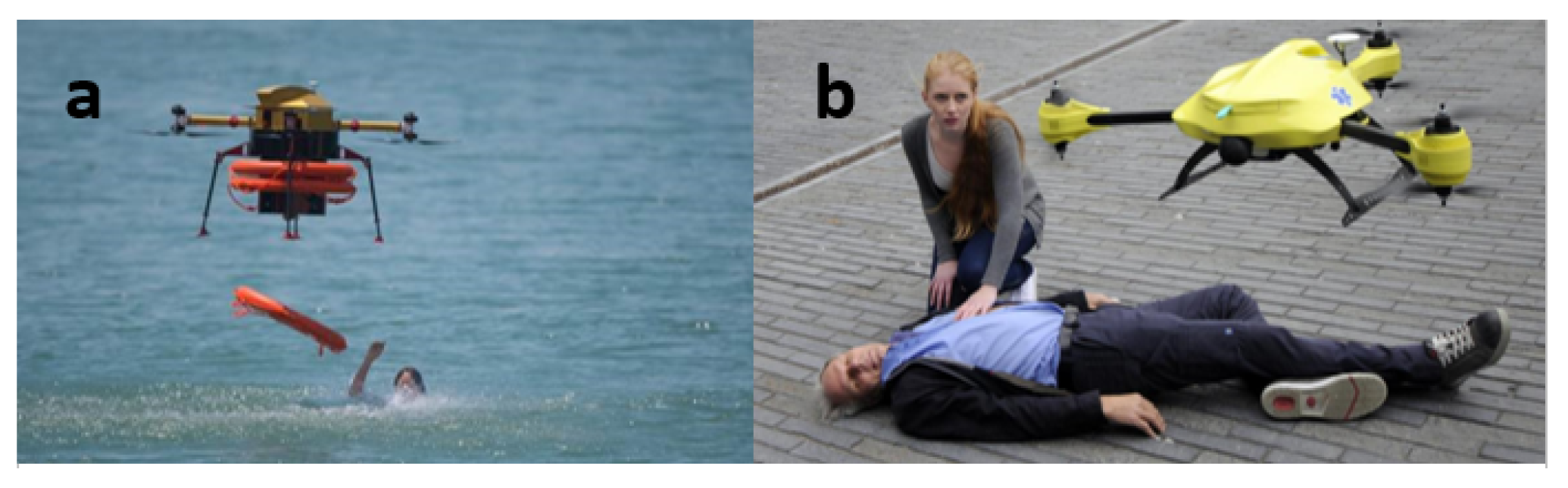
5.7. Search and Rescue
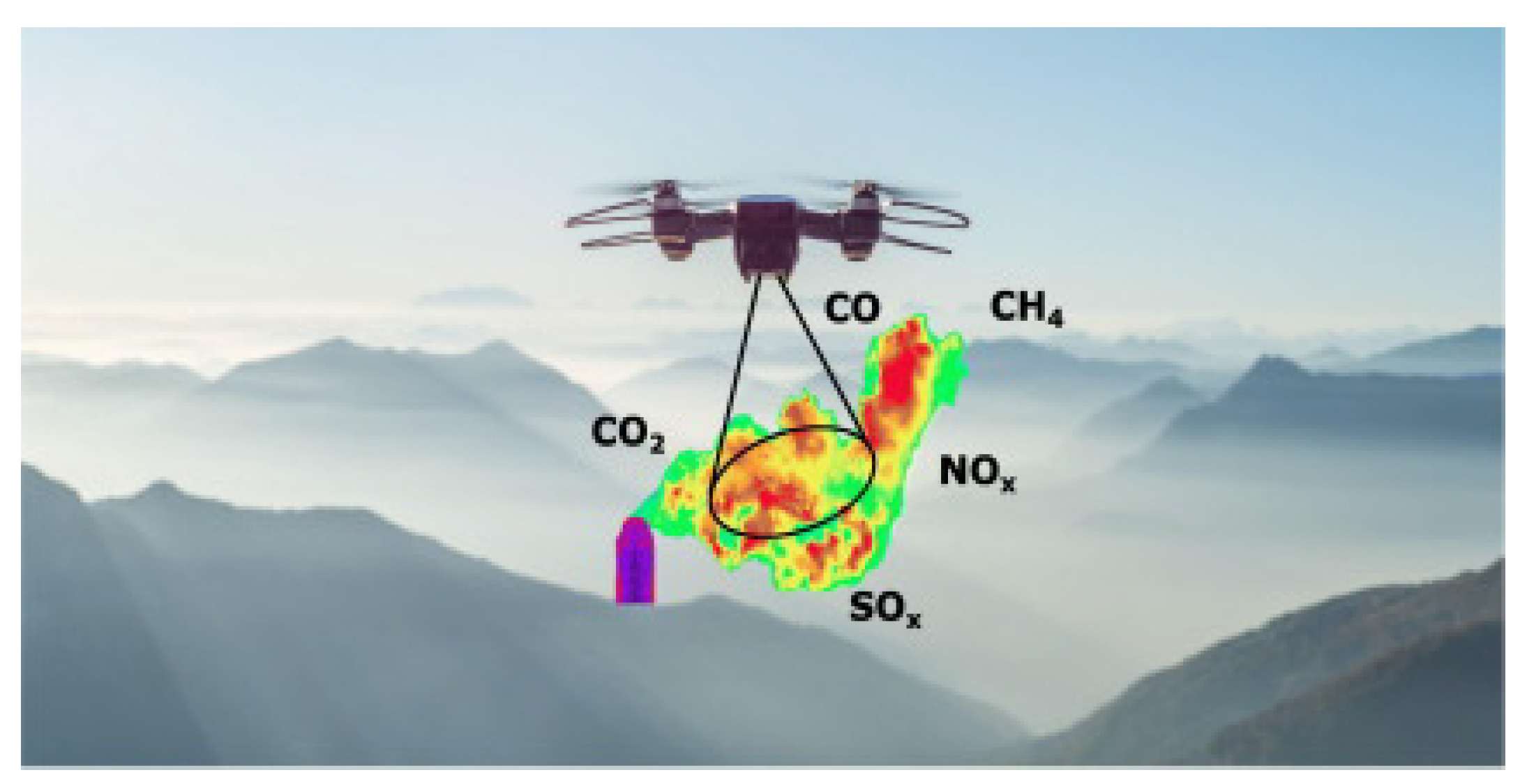
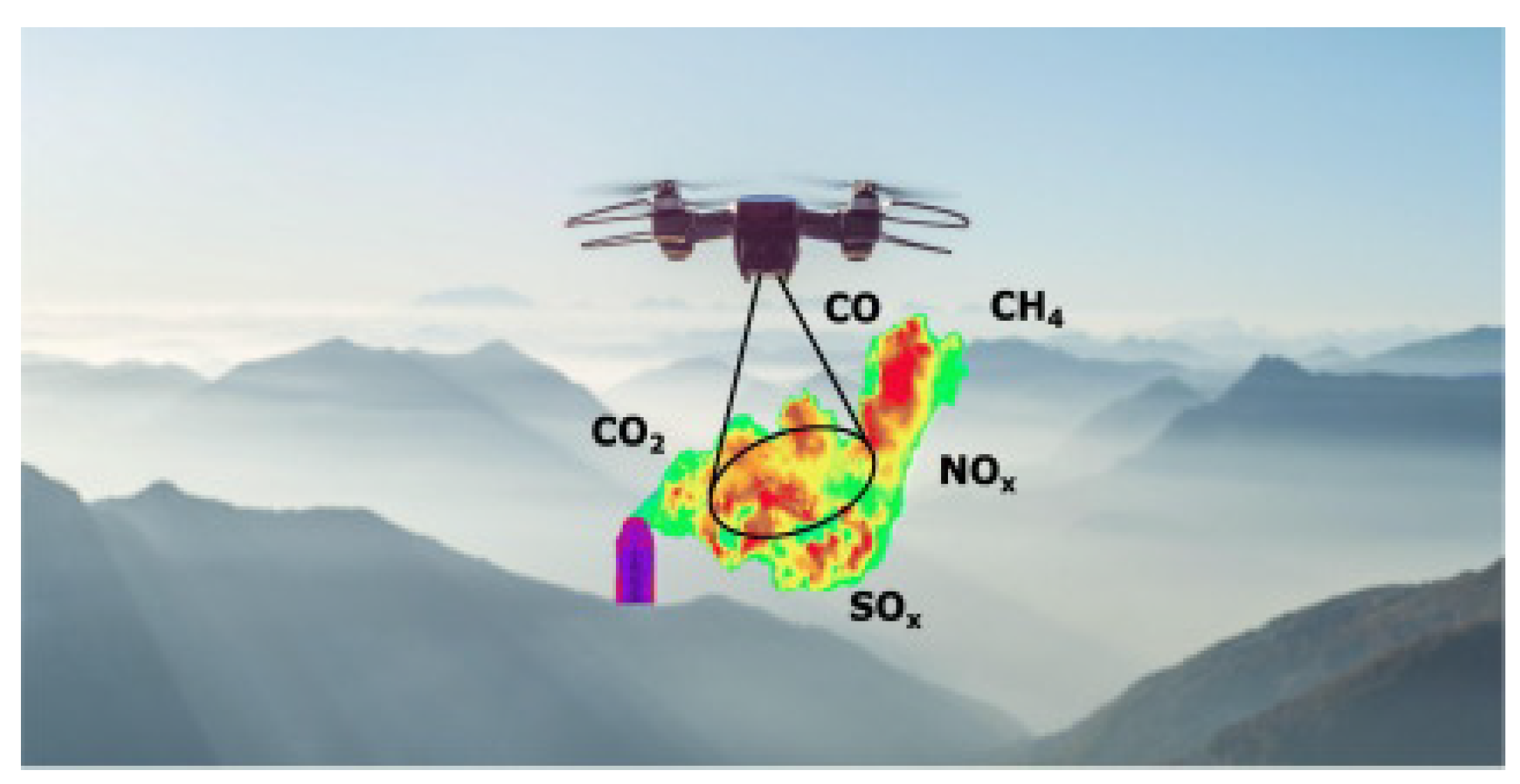
5.8. Remote Sensing
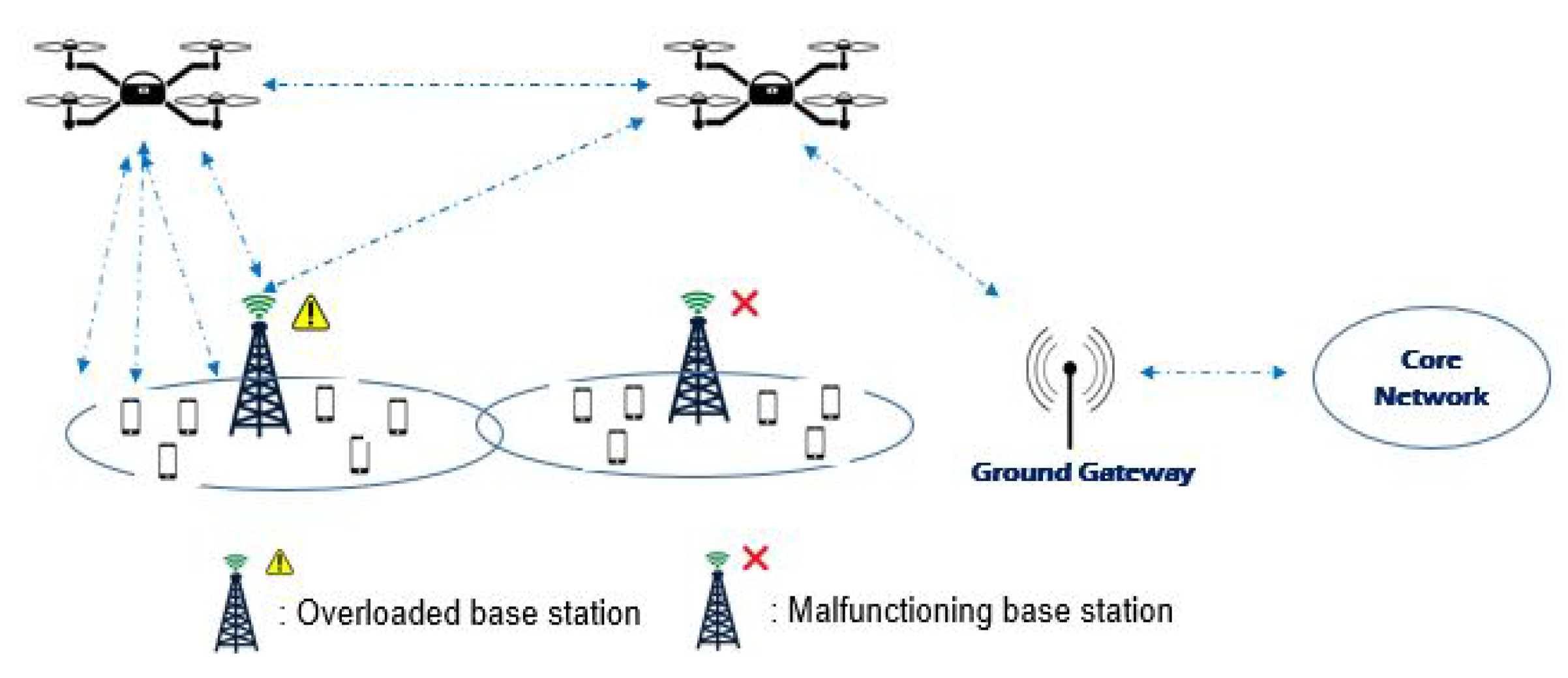
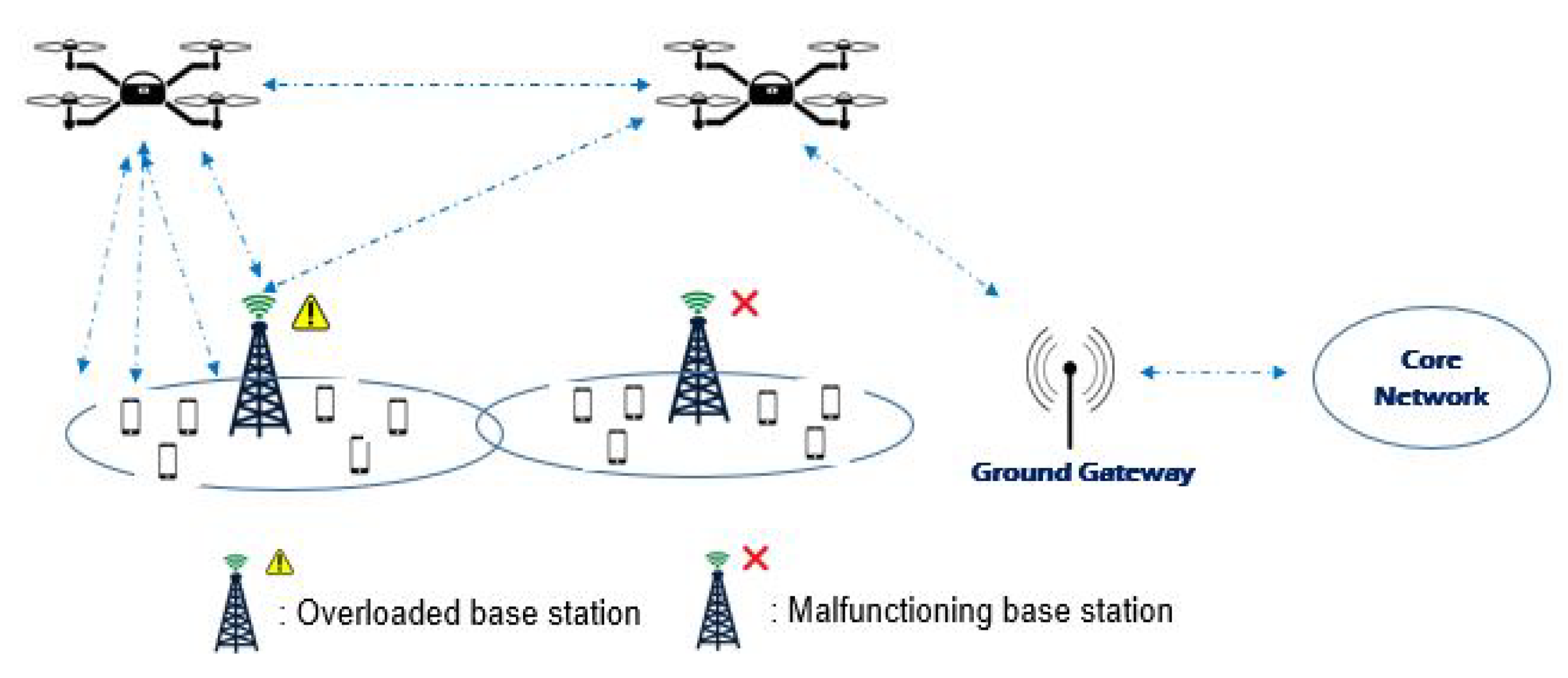
5.9. Wireless Communication
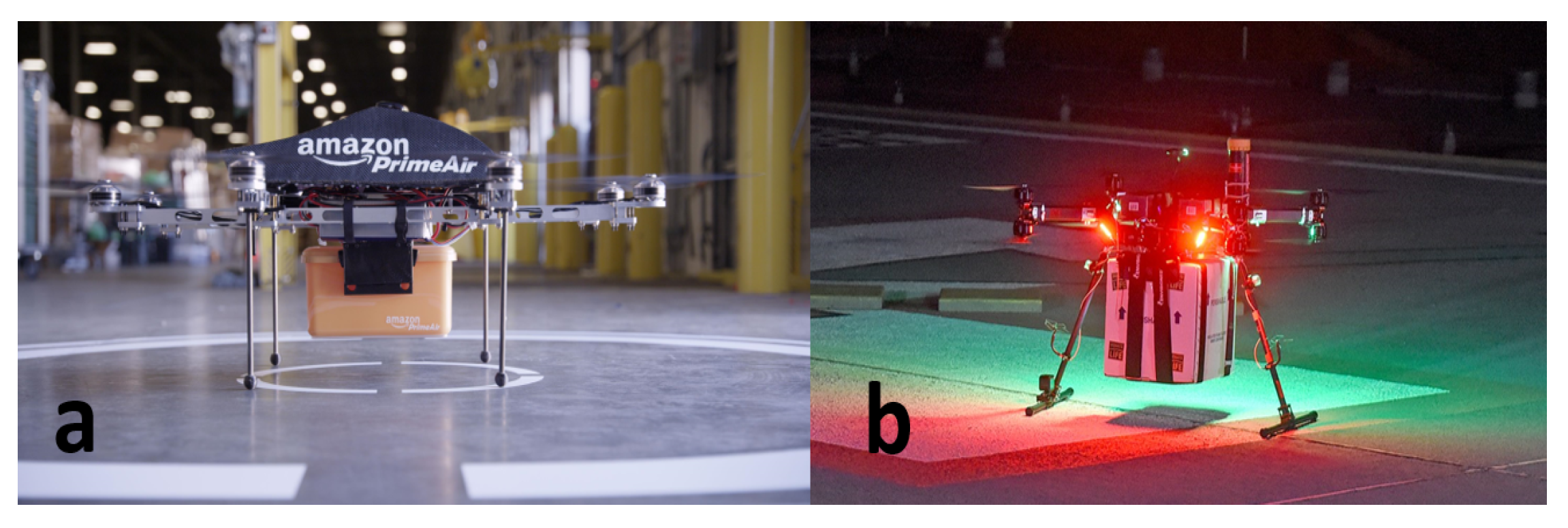
5.10. Delivery
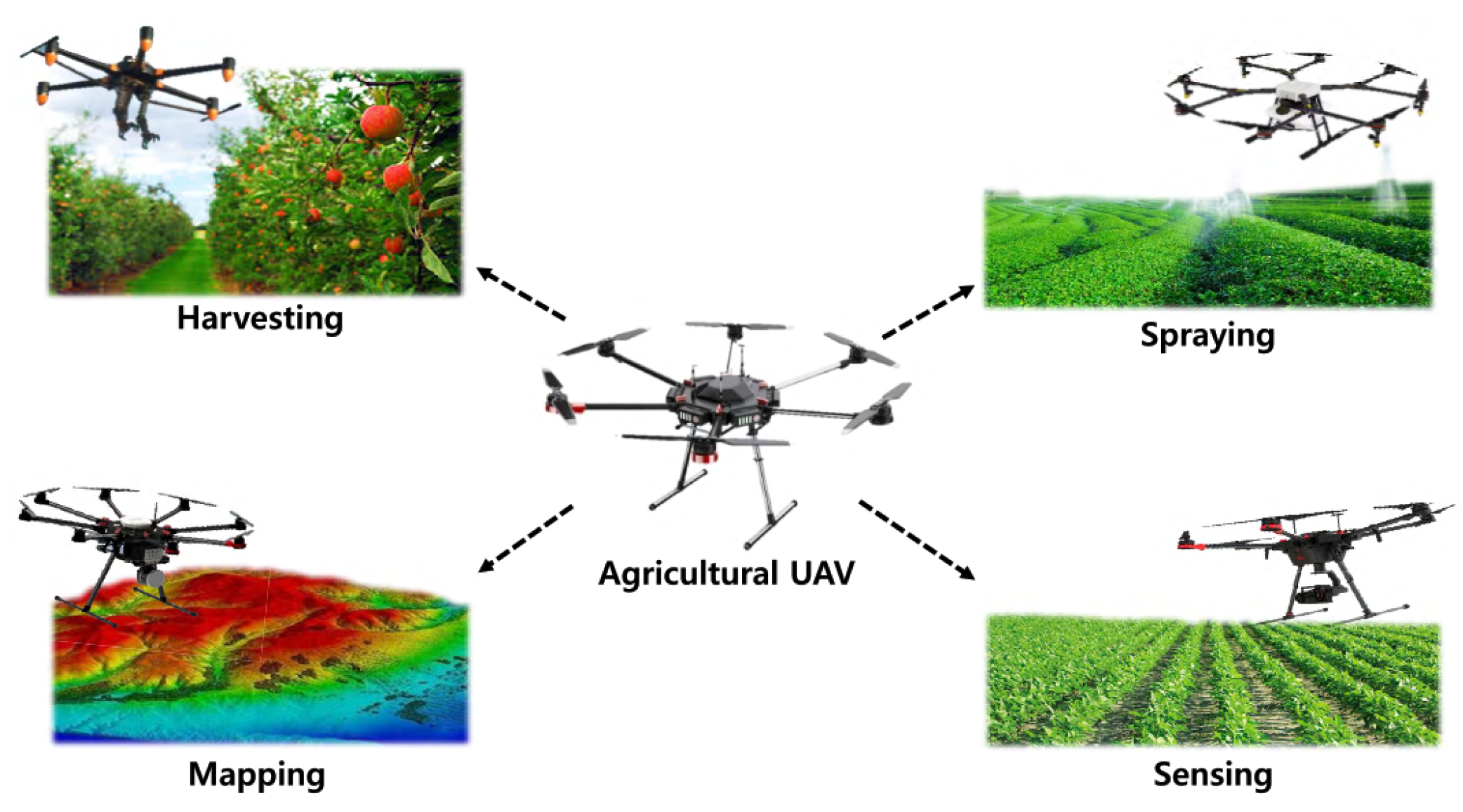
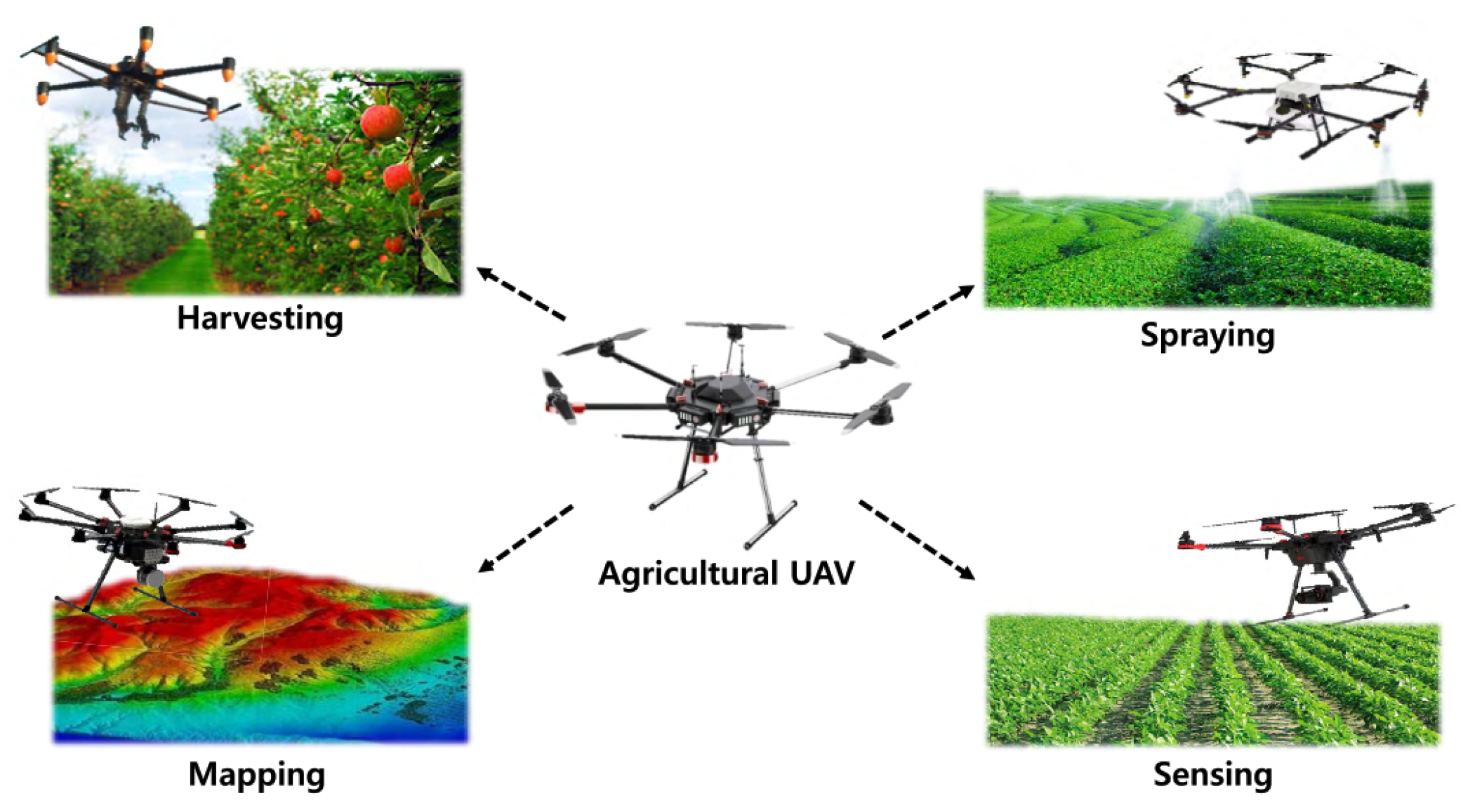
5.11. Precision Agriculture
6. Challenges, Limitations, and Recommendations
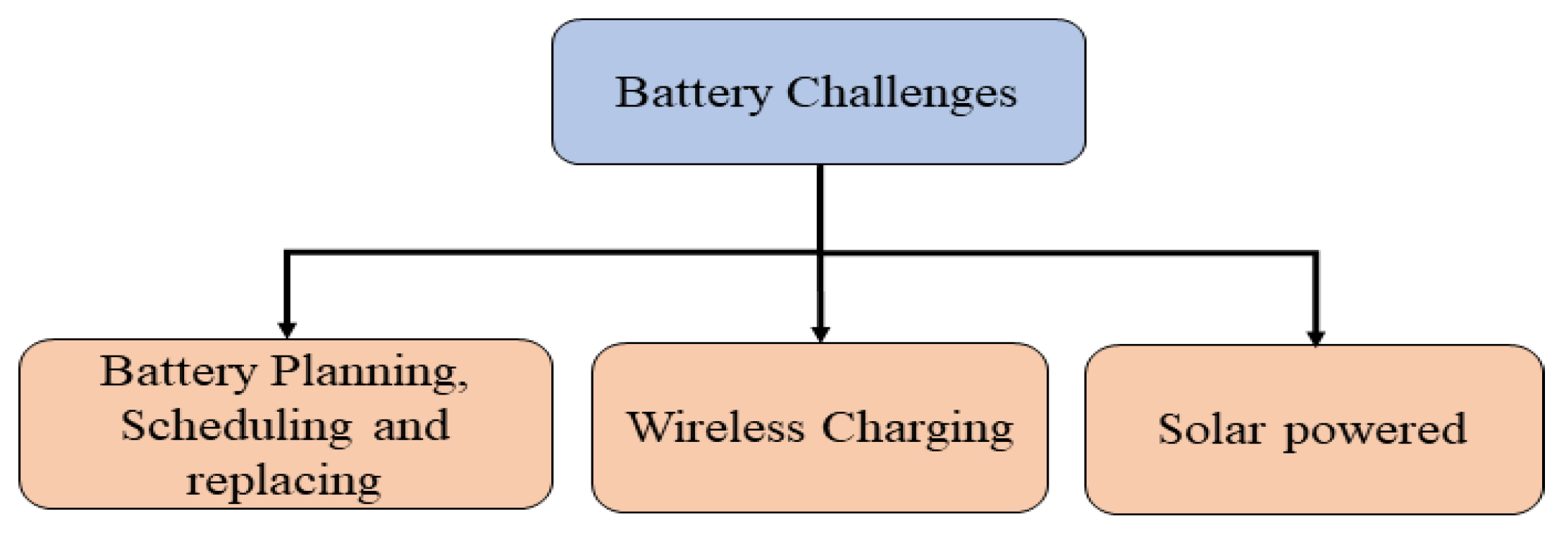
6.1. Battery Challenges
- Battery management involves the planning, scheduling, and replacement of a battery to accomplish required missions. In [124], a battery charge prediction model for UAVs was proposed to predict the end of the battery charge based on the particle filter algorithm. The discharge curve for the Li-Po battery was employed to tune the filter. In order to minimize the drop in battery life, battery assignment and scheduling for UAVs can be carried out. A heuristic algorithm can be used, as in [125], to solve the battery assignment and scheduling problems based on the time between charges and the discharge time. Swapping battery systems is a great solution for autonomous UAVs. These systems consist of a landing platform, battery charger, battery storage, and microcontroller [126]. The hot-swap system is similar to these, which powers the UAV continuously during the battery swapping process as the UAV is connected to an external power source. The swapping process is performed to prevent data loss, and then, the battery swapping action is performed. After that, the UAV is disconnected from the power supply to continue its mission [127].
- Some researchers have presented wireless charging in the literature. One of the proposed studies discussed recharging UAVs from power lines during the inspection process [128]. Another proposed solution is to provide an automatic charging station system for UAVs distributed on the UAV given path. This station system consists of four parts: a solar panel, a wireless charging pad, battery, and a power converter [129].
- Solar-powered UAVs provide high altitudes and long endurance flights, while solar power acts as the primary power source for the propulsion system. At the same time, the batteries are considered as the secondary source to be used at night and in conditions of the total absence of direct sunlight [130].
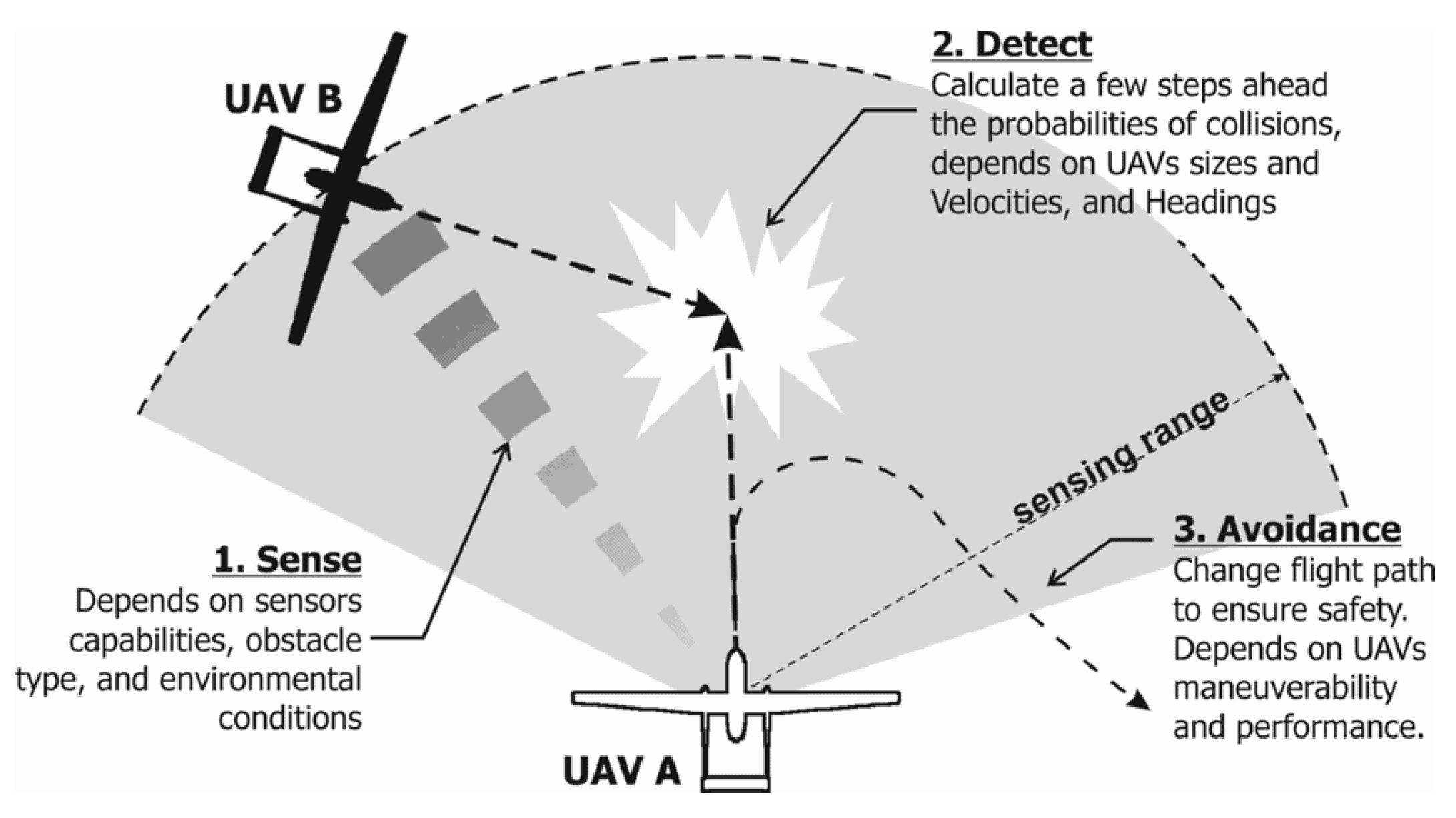
6.2. Collision Avoidance Challenges
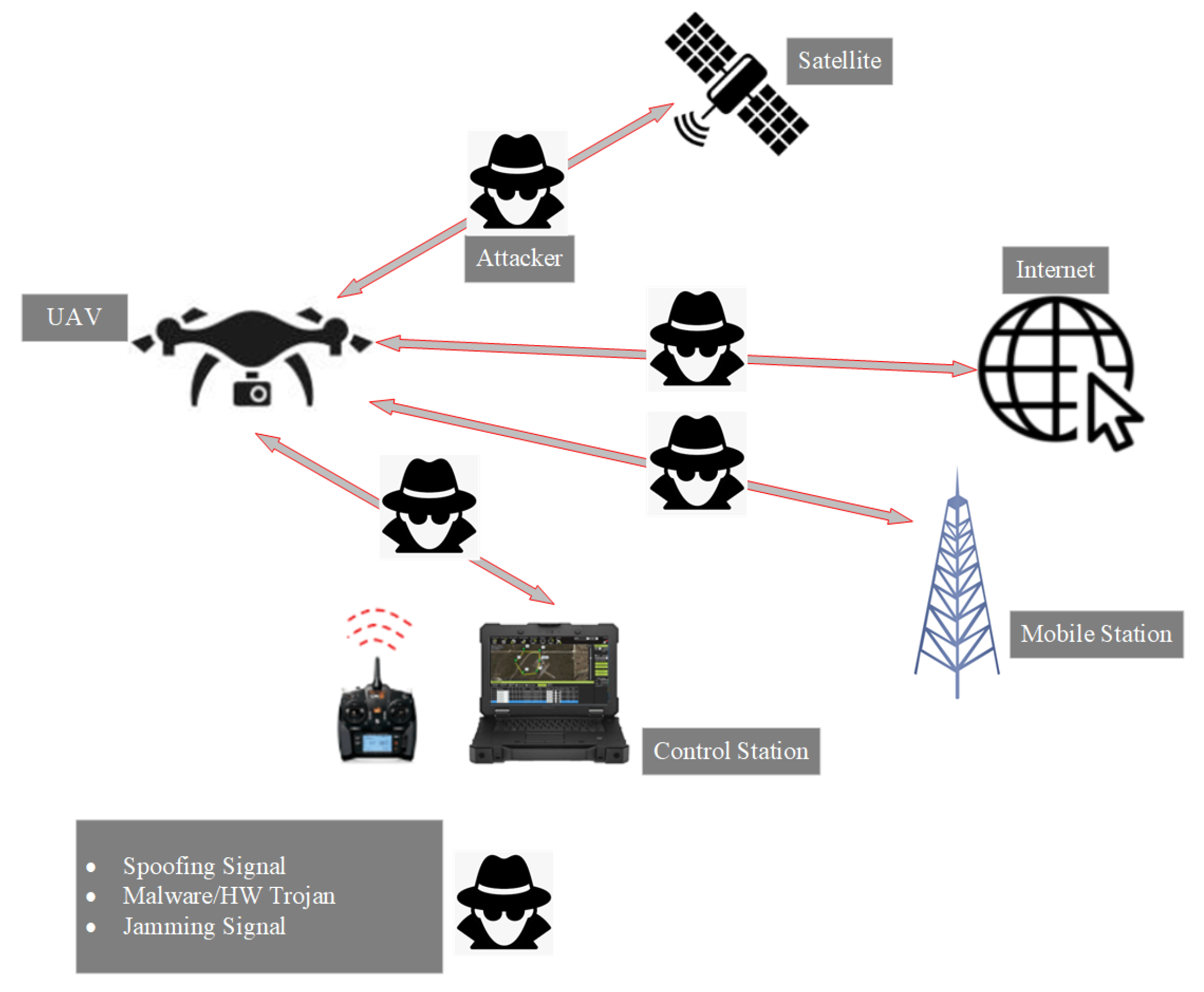
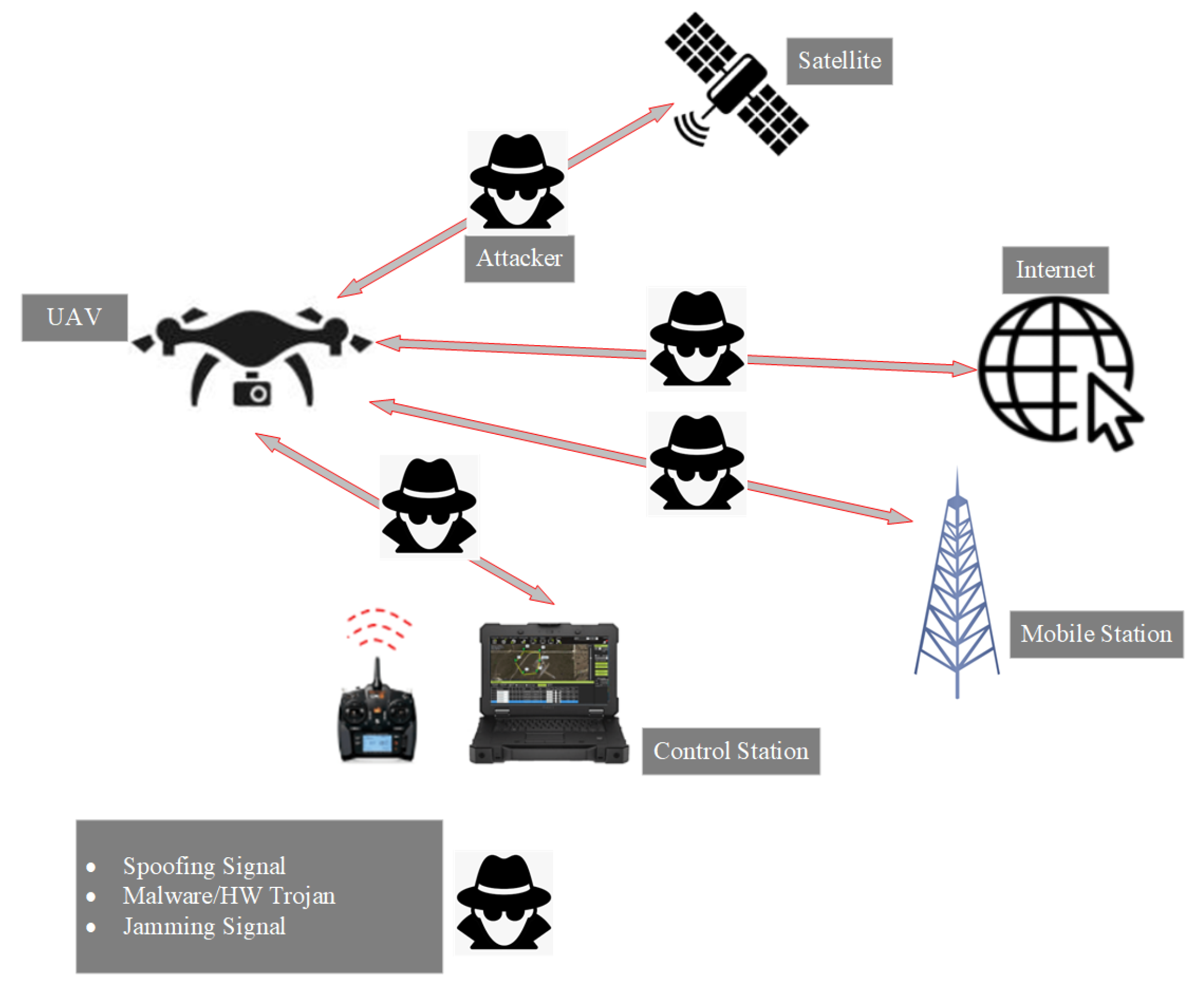
6.3. Security Challenges
6.4. Other Challenges
7. Future Research Trends
7.1. Swarm Uav Systems
7.2. Machine Learning and Deep Learning
7.3. Security and Privacy
7.4. Trajectory and Path Planning
7.5. Energy Charging
7.6. Optical Communication
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Holder, B. Unmanned Air Vehicles: An Illustrated Study of UAVs; Schiffer Publishing: Atglen, PA, USA, 2001. [Google Scholar]
- AUVSI. Association for Unmanned Vehicle Systems International. Available online: https://www.auvsi.org (accessed on 18 March 2021).
- Sadraey, M.H. Design of Unmanned Aerial Systems; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; Volume 1. [Google Scholar]
- Khamsi, M. Design and Analysis of an Unmanned Aerial Vehicle Capable of Carrying the Camera. Univers. J. Mech. Eng. 2019, 7, 87–96. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef] [Green Version]
- NASA. History of Unmanned Aerial Systems. Available online: https://www.slideserve.com/hoshi/history-of-unmanned-aerial-systems (accessed on 18 March 2021).
- Carrillo, L.R.G.; López, A.E.D.; Lozano, R.; Pégard, C. Quad Rotorcraft Control: Vision-Based Hovering and Navigation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Mkiramweni, M.E.; Yang, C.; Li, J.; Zhang, W. A survey of game theory in unmanned aerial vehicles communications. IEEE Commun. Surv. Tutor. 2019, 21, 3386–3416. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned Aerial Vehicles in Smart Agriculture: Applications, Requirements, and Challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Research, G.V. Commercial Drone Market Size, Share & Trends Analysis Report by Product (Fixed-Wing, Rotary Blade, Hybrid), by Application, by End-Use, by Region, and Segment Forecasts, 2021–2028. Available online: https://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market (accessed on 18 March 2021).
- Hassanalian, M.; Quintana, A.; Abdelkefi, A. Morphing and growing micro unmanned air vehicle: Sizing process and stability. Aerosp. Sci. Technol. 2018, 78, 130–146. [Google Scholar] [CrossRef]
- Fahlstrom, P.; Gleason, T. Introduction to UAV Systems; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Dempsey, M.E.; Rasmussen, S. Eyes of the Army–US Army Roadmap for Unmanned Aircraft Systems 2010–2035; US Army UAS Center of Excellence: Ft. Rucker, AL, USA, 2010.
- Doan, L.A. Micro Air Vehicle to Nano Air Vehicle: Theoretical and Experimental Studies of an Artificial Flapping Insect. Ph.D. Thesis, Nanotechnology Department, Universite Polytechnique, Valenciennes, France, 2019. [Google Scholar]
- Jafferis, N.T.; Helbling, E.F.; Karpelson, M.; Wood, R.J. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature 2019, 570, 491–495. [Google Scholar] [CrossRef]
- De Croon, G.; Perçin, M.; Remes, B.; Ruijsink, R.; De Wagter, C. The DelFly; Springer: Dordrecht, The Netherlands, 2016. [Google Scholar]
- PS, R.; Jeyan, M.L. Mini Unmanned Aerial Systems (UAV)-A Review of the Parameters for Classification of a Mini UAV. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 5. [Google Scholar] [CrossRef]
- Conner, M. NASA Armstrong Fact Sheet: Global Hawk High-Altitude Long-Endurance Science Aircraft. Available online: https://www.nasa.gov/centers/armstrong/news/FactSheets/FS-098-DFRC.html (accessed on 6 January 2021).
- Baitlessov, R.; Myrzakhmet, A.; Sharipov, K. Designing and Building a Hybrid (Electric/Ic) UAV; Nazarbayev University Repository: Nur-Sultan city, Republic of Kazakhstan, 2017. [Google Scholar]
- ELISTAIR. Orion 2 Tethered UAS. Available online: https://elistair.com (accessed on 18 October 2021).
- Yaacoub, J.P.; Salman, O. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef] [Green Version]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. On Integrating Unmanned Aircraft Systems into the National Airspace System: Issues, Challenges, Operational Restrictions, Certification, and Recommendations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 54. [Google Scholar]
- Arjomandi, M.; Agostino, S.; Mammone, M.; Nelson, M.; Zhou, T. Classification of Unmanned Aerial Vehicles; Report for Mechanical Engineering Class; University of Adelaide: Adelaide, Australia, 2006. [Google Scholar]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Preprints 2018. [Google Scholar] [CrossRef] [Green Version]
- Wikman, D.; Andersson, O. Propulsion System for a Small Unmanned Aerial Vehicle. 2020. Available online: http://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1438252&dswid=-8320 (accessed on 24 November 2021).
- Çoban, S.; Oktay, T. Unmanned Aerial Vehicles (UAVs) According to Engine Type. J. Aviat. 2018, 2, 177–184. [Google Scholar] [CrossRef]
- Adamski, M. Analysis of propulsion systems of unmanned aerial vehicles. J. Mar. Eng. Technol. 2017, 16, 291–297. [Google Scholar] [CrossRef]
- Avinash, B. Conceptual Design of Hybrid UAV. Int. J. Eng. Res. Technol. 2015, 4, 26–32. [Google Scholar]
- Cevher, L. Control System Design and Implementation of a Tilt Rotor Uav. Ph.D. Thesis, Middle East Technical University, Ankara, Turkey, 2019. [Google Scholar]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Airbus. Airbus, Dassault Aviation and Leonardo Reaffirm Their Total Commitment in the First Fully European MALE Programme. Available online: https://www.airbus.com/newsroom/press-releases/en/2018/04/Airbus-Dassault-Aviation-and-Leonardo-European-MALE-programme.html (accessed on 6 February 2021).
- Airbuss. Airbus, VSR700 The Multi-Mission Naval UAS. Available online: https://www.airbus.com/helicopters/UAS/VSR700.html (accessed on 6 February 2021).
- Safaee, A.; Moussavi, S.Z.; Menhaj, M.B. Design and Construction of Monocopter and its Nonlinear Control Using Photo Diode Array. U. Porto J. Eng. 2018, 4, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Das, M.K.; Kumar, P.M.; Anitha, A. ORBOT—An efficient & intelligent mono copter. In Proceedings of the 2017 IEEE International Conference on Circuits and Systems (ICCS), Thiruvananthapuram, India, 20–21 December 2017; pp. 168–171. [Google Scholar]
- Agarwal, S.; Mohan, A.; Kumar, K. Design Furthermore, Fabrication Of Twinrotor UAV; Department of Mechatronics, Manipal University: Manipal, India, 2013. [Google Scholar]
- Kastelan, D.; Konz, M.; Rudolph, J. Fully actuated tricopter with pilot-supporting control. IFAC-PapersOnLine 2015, 48, 79–84. [Google Scholar] [CrossRef]
- Tuna, T.; Ovur, S.E.; Gokbel, E.; Kumbasar, T. Design and development of FOLLY: A self-foldable and self-deployable quadcopter. Aerosp. Sci. Technol. 2020, 100, 105807. [Google Scholar] [CrossRef]
- Santhosh, L.; Chandrashekar, T. Anti-collision pentacopter for NDT applications. In Proceedings of the 2015 IEEE International Transportation Electrification Conference (ITEC), Chennai, India, 27–29 August 2015; pp. 1–13. [Google Scholar]
- Suprapto, B.Y.; Heryanto, M.A.; Suprijono, H.; Muliadi, J.; Kusumoputro, B. Design and development of heavy-lift hexacopter for heavy payload. In Proceedings of the 2017 International Seminar on Application for Technology of Information and Communication (iSemantic), Semarang, Indonesia, 7–8 October 2017; pp. 242–247. [Google Scholar]
- Er, M.J.; Yuan, S.; Wang, N. Development control and navigation of Octocopter. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; pp. 1639–1643. [Google Scholar]
- Yıldırım, Ş.; Çabuk, N.; Bakırcıoğlu, V. Design and trajectory control of universal drone system. Measurement 2019, 147, 106834. [Google Scholar] [CrossRef]
- Houghton, J.; Hoburg, W. Fly-by-Wire Control of a Monocopter, Project Report; Massachusetts Institute of Technology: Cambridge, MA, USA, 2008. [Google Scholar]
- NASA. Ducted Fan Designs Lead to Potential New Vehicles. Available online: https://spinoff.nasa.gov/Spinoff2010/t_4.html (accessed on 6 February 2021).
- Aerial, V. SwitchBlade-Elite. Available online: https://www.visionaerial.com/platforms/switchblade (accessed on 6 February 2021).
- DJI. PHANTOM 4 RTK. Available online: https://www.dji.com/phantom-4-rtk (accessed on 6 February 2021).
- Lenski, P. Design, Construction and Operation of a Pentacopter. 2017. Available online: http://www.diva-portal.org/smash/get/diva2\protect\leavevmode@ifvmode\kern+.2222em\relax1113858/FULLTEXT01.pdf (accessed on 24 November 2021).
- DJI. MATRICE 600PRO. Available online: https://www.dji.com/matrice600-pro (accessed on 6 February 2021).
- DJIs. Spreading Wings S1000. Available online: https://www.dji.com/spreading-wings-s1000 (accessed on 6 February 2021).
- D’Andrea, R. Distributed Flight Array. Available online: https://raffaello.name/projects/distributed-flight-array/ (accessed on 6 February 2021).
- Hegde, N.T.; George, V.; Nayak, C.G.; Kumar, K. Design, dynamic modelling and control of tilt-rotor UAVs: A review. Int. J. Intell. Unmanned Syst. 2019, 26, 723–745. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.; Sirimoglu, E.; Unel, M.; Aksit, M. Design and construction of a novel quad tilt-wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Deng, S.; Wang, S.; Zhang, Z. Aerodynamic performance assessment of a ducted fan UAV for VTOL applications. Aerosp. Sci. Technol. 2020, 103, 105895. [Google Scholar] [CrossRef]
- Kang, Y. Tilt-Rotor UAV System to Monitor Illegal Fishing. 2015. Available online: https://www.itu.int/en/ITU-D/Regional-Presence/AsiaPacific/Documents/Events/2015/December-YILF2015/day1/S1_KARI.pdf (accessed on 24 November 2021).
- Sato, M.; Muraoka, K. Flight controller design and demonstration of quad-tilt-wing unmanned aerial vehicle. J. Guid. Control. Dyn. 2015, 38, 1071–1082. [Google Scholar] [CrossRef]
- Technology, F. The Pivoting Wing Paradigm. Available online: http://www.freewing.com/PivotingWing/ (accessed on 7 February 2021).
- NASA. Mars Electric Reusable Flyer. Available online: https://flightopportunities.nasa.gov/technologies/153/ (accessed on 7 February 2021).
- FESTO. Smartbird. Available online: https://www.festo.com/group/en/cms/10238.htm (accessed on 7 February 2021).
- The Future of Things. Computer Controlled Pigeon. Available online: https://thefutureofthings.com/5459-computer-controlled-pigeon/ (accessed on 7 February 2021).
- Copter. Orvillecopter. Available online: http://bartjansen.tv/orvillecopter (accessed on 7 February 2021).
- Sadraey, M. A systems engineering approach to unmanned aerial vehicle design. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010; p. 9302. [Google Scholar]
- ElFaham, M.M.; Mostafa, A.M.; Nasr, G. Unmanned aerial vehicle (UAV) manufacturing materials: Synthesis, spectroscopic characterization and dynamic mechanical analysis (DMA). J. Mol. Struct. 2020, 1201, 127211. [Google Scholar] [CrossRef]
- Nicolai, L.M.; Carichner, G.E. Fundamentals of Aircraft and Airship Design, Volume 1–Aircraft Design; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2010. [Google Scholar]
- Singh, R.; Kumar, R.; Mishra, A.; Agarwal, A. Structural analysis of quadcopter frame. Mater. Today Proc. 2020, 22, 3320–3329. [Google Scholar] [CrossRef]
- Gokul Raj, P.; Esakkib, B.; Ganesan, S. Evaluation of Mechanical Strength Characteristics of Double Ducted Unmanned Amphibious Aerial Vehicle using Finite Element Analysis. Int. J. Math. Eng. Manag. Sci. 2019, 4, 420–431. [Google Scholar]
- Bhandari, A.; Ahmad, F.; Kumar, P.; Patil, P.P. Design and Vibration Characteristics Analysis of Quadcopter Body Frame. Int. J. Appl. Eng. Res. 2019, 14, 66–70. [Google Scholar]
- Ahmad, F.; Kumar, P.; Patil, P.P. Vibration characteristics based pre-stress analysis of a quadcopter’s body frame. In Materials Today: Proceedings, ScienceDirect; Elsevier: Amsterdam, The Netherlands, 2021; Volume 46, pp. 10329–10333. [Google Scholar]
- Gupta, M.S.; Venuprasad, M. CFD Analysis of Supersonic flow performance around a scramjet engines. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 455, pp. 12–27. [Google Scholar]
- Peng, K.; Cai, G.; Chen, B.M.; Dong, M.; Lum, K.Y.; Lee, T.H. Design and implementation of an autonomous flight control law for a UAV helicopter. Automatica 2009, 45, 2333–2338. [Google Scholar] [CrossRef]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for small unmanned aerial vehicles: A survey. Int. J. Control. Autom. Syst. 2010, 8, 36–44. [Google Scholar] [CrossRef]
- Nourmohammadi, A.; Jafari, M.; Zander, T.O. A survey on unmanned aerial vehicle remote control using brain–computer interface. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 337–348. [Google Scholar] [CrossRef]
- Zhou, H.; Xiong, H.L.; Liu, Y.; Tan, N.D.; Chen, L. Trajectory planning algorithm of UAV based on system positioning accuracy constraints. Electronics 2020, 9, 250. [Google Scholar] [CrossRef] [Green Version]
- Meng, B.B. UAV path planning based on bidirectional sparse A* search algorithm. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010; Volume 3, pp. 1106–1109. [Google Scholar]
- Chen, X.; Chen, X.M.; Zhang, J. The dynamic path planning of UAV based on A* algorithm. In Applied Mechanics and Materials; Trans Tech Publications: Bach, SZ, Switzerland, 2014; Volume 494, pp. 1094–1097. [Google Scholar]
- Wang, H.; Zhou, H.; Yao, H. Research on Autonomous Planning Method Based on Improved Quantum Particle Swarm Optimization for Autonomous Underwater Vehicle; OCEANS 2016 MTS/IEEE Monterey: Monterey, CA, USA, 2016; pp. 1–7. [Google Scholar]
- Shiri, H.; Park, J.; Bennis, M. Massive autonomous UAV path planning: A neural network based mean-field game theoretic approach. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Shorakaei, H.; Vahdani, M.; Imani, B.; Gholami, A. Optimal cooperative path planning of unmanned aerial vehicles by a parallel genetic algorithm. Robotica 2016, 34, 823–836. [Google Scholar] [CrossRef]
- Espinoza, T.; Dzul, A.; Llama, M. Linear and nonlinear controllers applied to fixed-wing uav. Int. J. Adv. Robot. Syst. 2013, 10, 33. [Google Scholar] [CrossRef]
- Mobarez, E.N.; Sarhan, A.; Ashry, M.M. Comparative robustness study of multivariable controller of fixed wing Ultrastick25-e UAV. In Proceedings of the 2018 14th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 29–30 December 2018; pp. 146–150. [Google Scholar]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a quadcopter platform. In Proceedings of the 2013 International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013; pp. 1–6. [Google Scholar]
- Imanberdiyev, N.; Fu, C.; Kayacan, E.; Chen, I.M. Autonomous navigation of UAV by using real-time model-based reinforcement learning. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar]
- Sheet of U.A.F.F. MQ-1 PREDATOR. US Airforce Web Page. May 2008. Available online: http://www.af.mil/library (accessed on 24 November 2021).
- Fulghum, D.A. Boeing Redesigns X-45 At the orders of Darpa, the unmanned X-45C strike aircraft will offer increased size, range and payload. Aviat. Week Space Technol. 2003, 158, 38. [Google Scholar]
- Rosenfeld, J.V. Landmines: The human cost. ADF Health J. Aust. Def. Force Health Serv. 2000, 1, 93–98. [Google Scholar]
- Castiblanco, C.; Rodriguez, J.; Mondragon, I.; Parra, C.; Colorado, J. Air drones for explosive landmines detection. In ROBOT2013: First Iberian Robotics Conference; Springer: Berlin/Heidelberg, Germany, 2014; pp. 107–114. [Google Scholar]
- Baur, J.; Steinberg, G.; Nikulin, A.; Chiu, K.; de Smet, T.S. Applying deep learning to automate UAV-based detection of scatterable landmines. Remote Sens. 2020, 12, 859. [Google Scholar] [CrossRef] [Green Version]
- Šipoš, D.; Gleich, D. A lightweight and low-power UAV-borne ground penetrating radar design for landmine detection. Sensors 2020, 20, 22. [Google Scholar]
- Cantelli, L.; Mangiameli, M.; Melita, C.D.; Muscato, G. UAV/UGV cooperation for surveying operations in humanitarian demining. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linköping, Sweden, 21–26 October 2013; pp. 1–6. [Google Scholar]
- Nikulin, A.; De Smet, T.S.; Baur, J.; Frazer, W.D.; Abramowitz, J.C. Detection and identification of remnant PFM-1 ‘Butterfly Mines’ with a UAV-based thermal-imaging protocol. Remote Sens. 2018, 10, 1672. [Google Scholar] [CrossRef] [Green Version]
- Cerquera, M.R.P.; Montaño, J.D.C.; Mondragón, I.; Canbolat, H. UAV for Landmine Detection Using SDR-Based GPR Technology. In Robots Operating in Hazardous Environments; IntechOpen: London, UK, 2017; pp. 26–55. [Google Scholar]
- Chung, Y.S.; Kim, S.H.; Moon, J.H.; Kim, Y.J.; Lim, J.M.; Lee, J.H. Source identification and long-term monitoring of airborne particulate matter (PM2. 5/PM10) in an urban region of Korea. J. Radioanal. Nucl. Chem. 2005, 267, 35–48. [Google Scholar] [CrossRef]
- Lushi, E.; Stockie, J.M. An inverse Gaussian plume approach for estimating atmospheric pollutant emissions from multiple point sources. Atmos. Environ. 2010, 44, 1097–1107. [Google Scholar] [CrossRef] [Green Version]
- Hutchinson, M.; Oh, H.; Chen, W.H. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef] [Green Version]
- Melamed, M.L.; Solomon, S.; Daniel, J.; Langford, A.; Portmann, R.; Ryerson, T.; Nicks, D., Jr.; McKeen, S. Measuring reactive nitrogen emissions from point sources using visible spectroscopy from aircraft. J. Environ. Monit. 2003, 5, 29–34. [Google Scholar] [CrossRef]
- Hirst, B.; Jonathan, P.; del Cueto, F.G.; Randell, D.; Kosut, O. Locating and quantifying gas emission sources using remotely obtained concentration data. Atmos. Environ. 2013, 74, 141–158. [Google Scholar] [CrossRef] [Green Version]
- Sanada, Y.; Torii, T. Aerial radiation monitoring around the Fukushima Dai-ichi nuclear power plant using an unmanned helicopter. J. Environ. Radioact. 2015, 139, 294–299. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Chen, B.; Qiu, S.; Zhu, Z.; Ma, L.; Qiu, X.; Duan, W. Real-Time data driven simulation of air contaminant dispersion using particle filter and UAV sensory system. In Proceedings of the 2017 IEEE/ACM 21st International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Rome, Italy, 18–20 October 2017; pp. 1–4. [Google Scholar]
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef] [PubMed]
- Qiu, S.; Chen, B.; Wang, R.; Zhu, Z.; Wang, Y.; Qiu, X. Estimating contaminant source in chemical industry park using UAV-based monitoring platform, artificial neural network and atmospheric dispersion simulation. RSC Adv. 2017, 7, 39726–39738. [Google Scholar] [CrossRef] [Green Version]
- Jenkins, D.; Vasigh, B. The Economic Impact of Unmanned Aircraft Systems Integration in the United States; Association of Unmanned Vehicle Systems International: Arlington, VA, USA, 2013. [Google Scholar]
- Molitch-Hou, M. Ai Build to Bring Artificial Intelligence to Additive Construction. Engineering.com. 26 October 2016. Available online: https://www.engineering.com/story/ai-build-to-bring-artificial-intelligence-to-additive-construction (accessed on 24 November 2021).
- Borgobello, B. Flying Robots to Build a 6-m Tower. New Atlas. 28 November 2011. Available online: https://newatlas.com/flying-robots-to-build-6-meter-tower/20639/ (accessed on 24 November 2021).
- Knight, W. New Boss on Construction Sites Is a Drone; MIT Technology Review: Cambridge, MA, USA, 2015. [Google Scholar]
- Irizarry, J.; Costa, D.B. Exploratory study of potential applications of unmanned aerial systems for construction management tasks. J. Manag. Eng. 2016, 32, 05016001. [Google Scholar] [CrossRef]
- Watson, M. Ways to Use Drones in Construction! BIM News, 23 June 2016. Available online: https://blogs.cdc.gov/niosh-science-blog/2017/10/23/drones-construction/ (accessed on 24 November 2021).
- Choi, S.s.; Kim, E.k. Design and implementation of vision-based structural safety inspection system using small unmanned aircraft. In Proceedings of the 2015 17th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Korea, 1–3 July 2015; pp. 562–567. [Google Scholar]
- Tom, N.M.F. Crashed! Why Drone Delivery Is Another Tech Idea not Ready to Take Off. Int. Bus. Res. 2020, 13, 251. [Google Scholar] [CrossRef]
- Hassanalian, M.; Rice, D.; Abdelkefi, A. Evolution of space drones for planetary exploration: A review. Prog. Aerosp. Sci. 2018, 97, 61–105. [Google Scholar] [CrossRef]
- NASA. Mars Helicopter. Available online: https://mars.nasa.gov/technology/helicopter/#Media (accessed on 25 February 2021).
- NASAs. Preliminary Research Aerodynamic Design to Land on Mars (PrandtlM). Available online: https://www.nasa.gov/centers/armstrong/multimedia/imagegallery/PRANDTL_Wing/prandtl-m-wing.html (accessed on 25 February 2021).
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- SOOMVI. S-200. Available online: http://www.soomvi.com/en/?c=215 (accessed on 25 February 2021).
- Delft, T. Ambulance Drone. Available online: https://www.tudelft.nl/en/ide/research/research-labs/applied-labs/ambulance-drone/ (accessed on 25 February 2021).
- Bailon-Ruiz, R.; Lacroix, S. Wildfire remote sensing with UAVs: A review from the autonomy point of view. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 412–420. [Google Scholar]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-connected UAV: Potential, challenges, and promising technologies. IEEE Wirel. Commun. 2018, 26, 120–127. [Google Scholar] [CrossRef]
- Amazon. Amazon Prime Air. Available online: https://www.amazon.com/Amazon-Prime-Air/ (accessed on 7 March 2021).
- Company, D. Unmanned Aerial Vehicles. Available online: https://www.dhl.com/global-en/home/insights-and-innovation/thought-leadership/trend-reports/unmanned-aerial-vehicles.html (accessed on 18 March 2021).
- MACH. A Drone Just Flew a Kidney to a Transplant Patient for the First Time Ever. Available online: https://www.nbcnews.com/mach/science/drone-just-flew-kidney-transplant-patient-first-time-ever-it-ncna1001396 (accessed on 7 March 2021).
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Radoglou–Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery health management system for electric UAVs. In Proceedings of the 2011 Aerospace Conference, Hangzhou, China, 12–14 June 2011; pp. 1–9. [Google Scholar]
- Park, S.; Zhang, L.; Chakraborty, S. Battery assignment and scheduling for drone delivery businesses. In Proceedings of the 2017 IEEE/ACM International Symposium on Low Power Electronics and Design (ISLPED), Taipei, Taiwan, 24–26 July 2017; pp. 1–6. [Google Scholar]
- Swieringa, K.A.; Hanson, C.B.; Richardson, J.R.; White, J.D.; Hasan, Z.; Qian, E.; Girard, A. Autonomous battery swapping system for small-scale helicopters. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3335–3340. [Google Scholar]
- Michini, B.; Toksoz, T.; Redding, J.; Michini, M.; How, J.; Vavrina, M.; Vian, J. Automated battery swap and recharge to enable persistent UAV missions. In Proceedings of the Infotech@Aerospace 2011; American Institute of Aeronautics and Astronautics: Reston, VI, USA, 2011; pp. 1–10. [Google Scholar]
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Ma, Z. Design of wireless power transfer device for UAV. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2449–2454. [Google Scholar]
- Lee, J.S.; Yu, K.H. Optimal path planning of solar-powered UAV using gravitational potential energy. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1442–1451. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Sampling-based path planning for UAV collision avoidance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3179–3192. [Google Scholar] [CrossRef]
- Blakeney, R.A. Air to Air Sense and Avoid on Unmanned Aircraft Systems. Available online: https://ryanblakeney.com/air-to-air-sense-and-avoid-on-uas/ (accessed on 25 October 2021).
- Shvetsova, S.V.; Shvetsov, A.V. Ensuring safety and security in employing drones at airports. J. Transp. Secur. 2021, 14, 41–53. [Google Scholar] [CrossRef]
- Sun, X.; Ng, D.W.K.; Ding, Z.; Xu, Y.; Zhong, Z. Physical layer security in UAV systems: Challenges and opportunities. IEEE Wirel. Commun. 2019, 26, 40–47. [Google Scholar] [CrossRef] [Green Version]
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.T.; Plosila, J. Swarms of unmanned aerial vehicles—A survey. J. Ind. Inf. Integr. 2019, 16, 100–106. [Google Scholar] [CrossRef]
- Noorwali, A.; Javed, M.A.; Khan, M.Z. Efficient UAV Communications: Recent Trends and Challenges. CMC-Comput. Mater. Contin. 2021, 67, 463–476. [Google Scholar] [CrossRef]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A review of deep learning methods and applications for unmanned aerial vehicles. J. Sens. 2017, 2017, 3296874. [Google Scholar] [CrossRef]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design challenges of multi-UAV systems in cyber-physical applications: A comprehensive survey and future directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Oubbati, O.S.; Atiquzzaman, M.; Ahanger, T.A.; Ibrahim, A. Softwarization of UAV networks: A survey of applications and future trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Maximum Dimension |
|---|---|
| Ultra-Small (NAV) | <7.5 cm |
| Very Small (MAV) | 7.5–15 cm |
| Small | 15–200 cm |
| Medium | 2–10 m |
| Large | >10 m |
| Category | Maximum Range | Maximum Endurance |
|---|---|---|
| Very Close Range | 5 km | <6 h |
| Tethered UAS | 10 km | 24 h |
| Close Range | 50 km | 6 h |
| Short Range | 150 km | 12 h |
| Mid-Range | 650 km | 12–36 h |
| Endurance | 300 km | 36 h |
| Class | Maximum Weight | Maximum Range |
|---|---|---|
| Nano | 200 g | 5 km |
| Micro | 2 kg | 25 km |
| Mini | 20 kg | 40 km |
| Light | 50 kg | 70 km |
| Small | 150 kg | 150 km |
| Tactical | 600 kg | 150 km |
| MALE | 1000 kg | 200 km |
| HALE | 1000 kg | 250 km |
| Heavy | 2000 kg | 1000 km |
| Super heavy | 24,950 kg | 1500 km |
| Category | MTOW | Altitude (m) | Airspeed |
|---|---|---|---|
| Group 1 | >20 pounds | <365.76 AGL | <100 knots |
| Group 2 | 21–55 pounds | <1066.8 AGL | <250 knots |
| Group 3 | <1320 pounds | <5486.4 MSL | <250 knots |
| Group 4 | >1320 pounds | <5486.4 MSL | Any airspeed |
| Group 5 | >1320 pounds | >5486.4 MSL | Any airspeed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elmeseiry, N.; Alshaer, N.; Ismail, T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace 2021, 8, 363. https://doi.org/10.3390/aerospace8120363
Elmeseiry N, Alshaer N, Ismail T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace. 2021; 8(12):363. https://doi.org/10.3390/aerospace8120363
Chicago/Turabian StyleElmeseiry, Nourhan, Nancy Alshaer, and Tawfik Ismail. 2021. "A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications" Aerospace 8, no. 12: 363. https://doi.org/10.3390/aerospace8120363
APA StyleElmeseiry, N., Alshaer, N., & Ismail, T. (2021). A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace, 8(12), 363. https://doi.org/10.3390/aerospace8120363