
A Multi-Objective Coverage Path Planning Algorithm for UAVs to Cover Spatially Distributed Regions in Urban Environments



Abstract
:1. Introduction
2. Background and Related Work on CPP
2.1. Single Area of Interest Coverage
2.1.1. Different Types of the Area of Interest Used for the Coverage Missions
2.1.2. Area of Interest Decomposition Techniques Used in the Coverage Path Planning
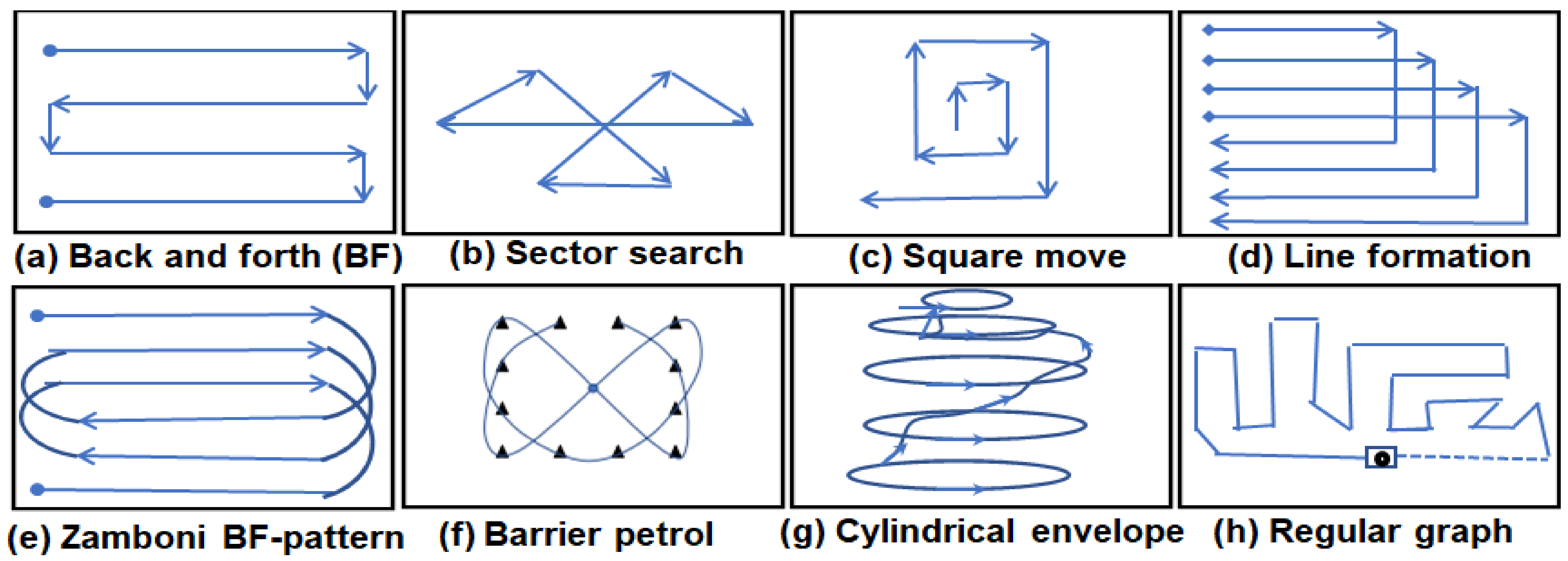
2.1.3. Geometric Flight Patterns Used in the Area of Interest Coverage
2.1.4. Coverage Types Employed in the Practical Scenarios with Unmanned Aerial Vehicle
- Simple coverage: In this type of coverage, the AOI is covered only once. The example of this type of the coverage are imagery, sprays, surveillance, and scans etc.
- Continuous coverage: In this type of coverage, the AOI is covered multiple times. The example of this type of coverage is objects/events detection in the AOI, and periodic readings collection from different parts of the AOI.
2.1.5. Overview of Path Optimization Algorithms Used in the Coverage Path Planning
2.1.6. State-of-the-Art Coverage Path Planning Methods
2.2. Spatially Distributed and Multiple AOI Coverage
2.3. Major Contributions in the Field of UAV CPP for Spatially Distributed Regions Coverage
3. The Proposed Multi-Objective Coverage Flight Path Planning Algorithm
3.1. Modeling of the UAV’s Operating Environment from a Real Urban Environment Map
3.2. Locating All Areas of Interest on a Modelled Map
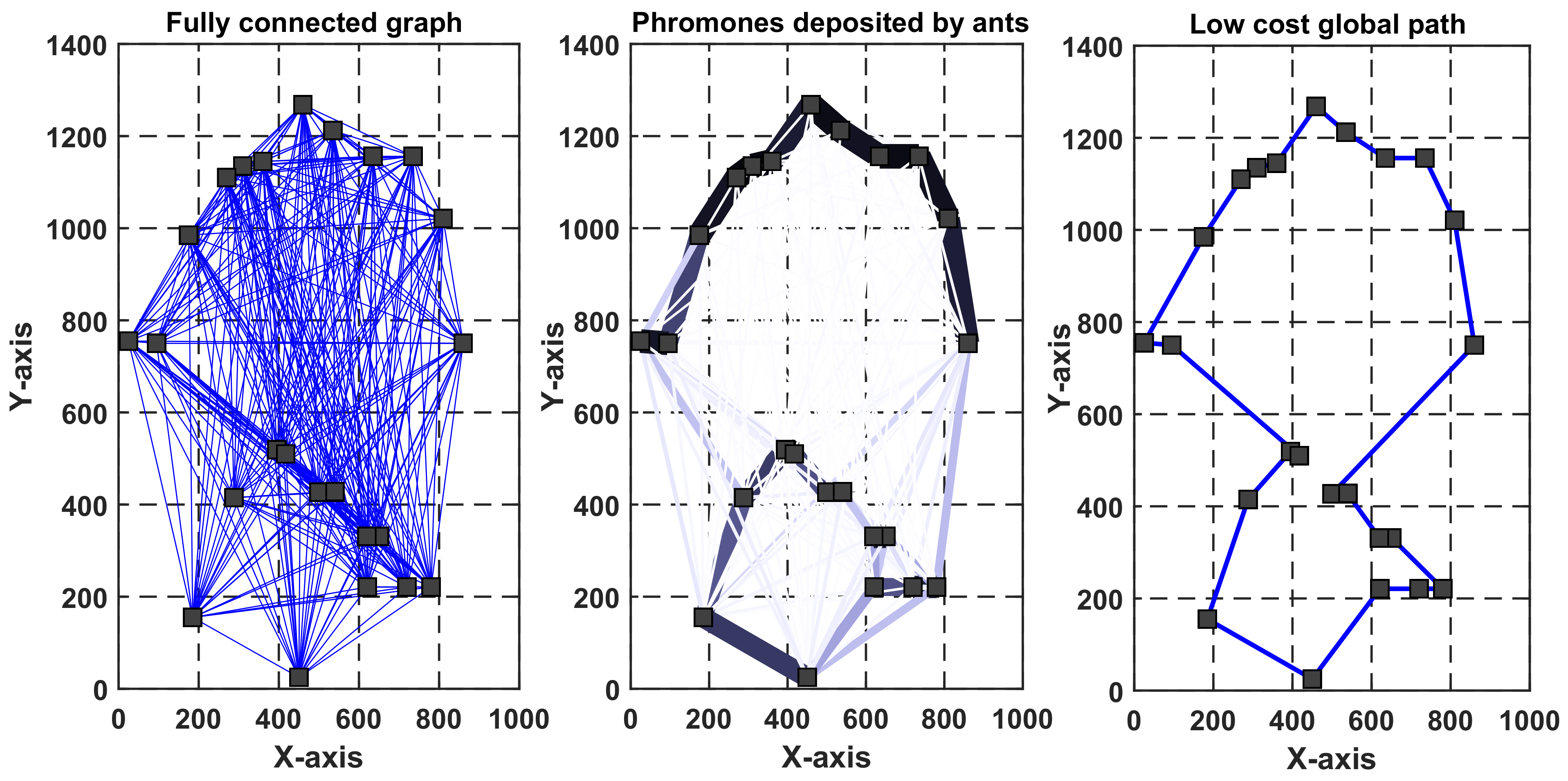
3.3. Computing Low-Cost Traversal Order of the Area of Interests in the Form of a Graph
3.4. Finding an Intra-Regional Coverage Path from an AOI Located in Urban Environments
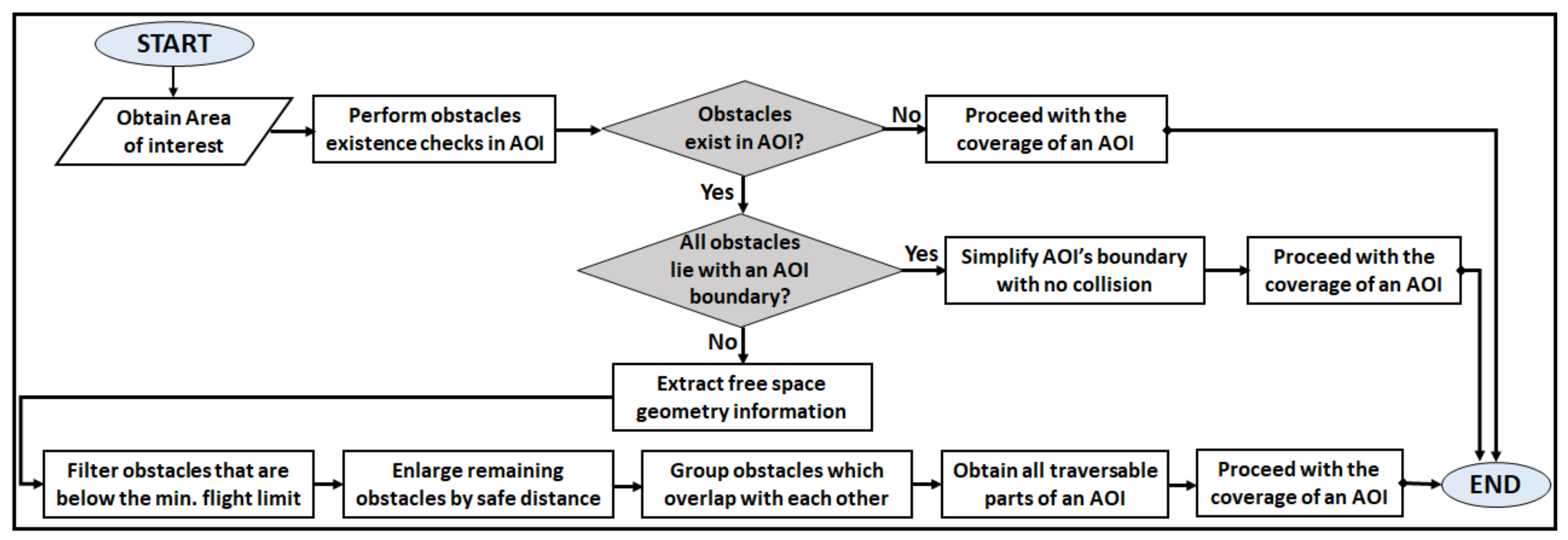
3.4.1. Multi-Criteria-Based Free Space Geometry Information Extraction from an AOI
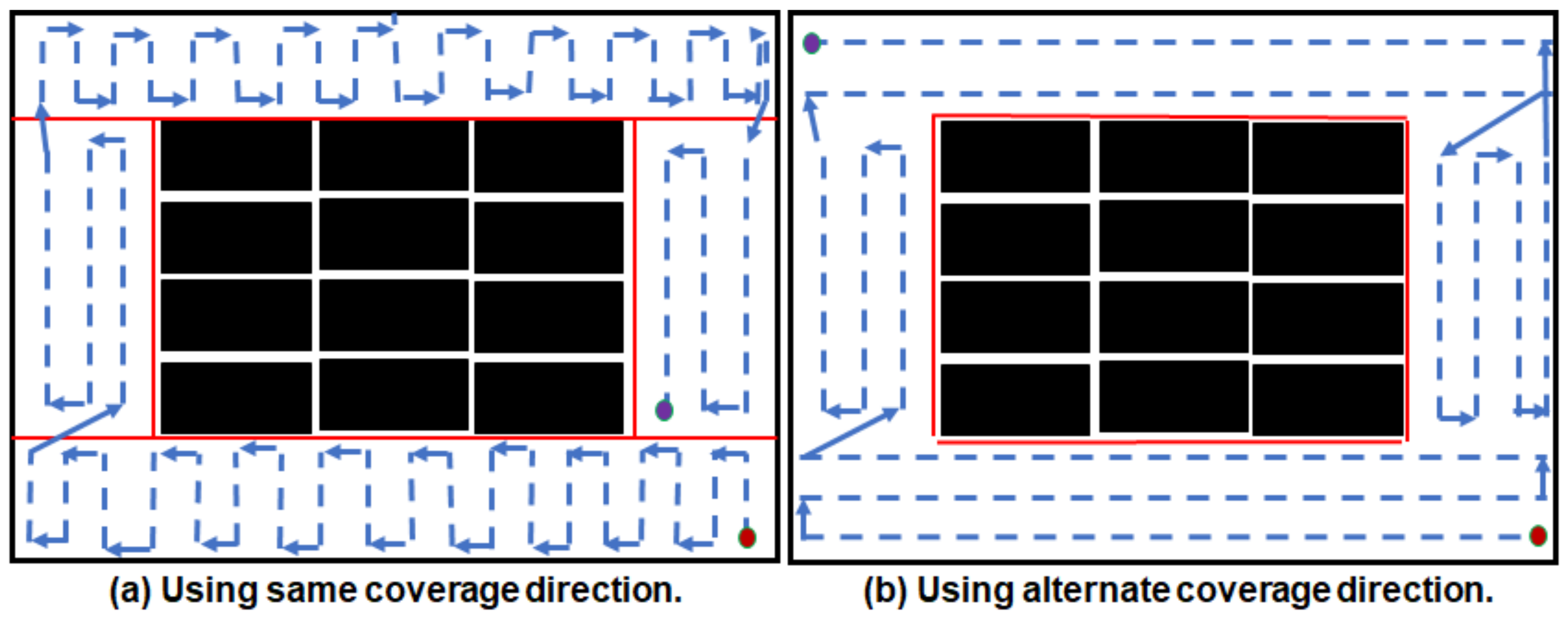
3.4.2. Choosing the Appropriate Coverage Direction(s) by Exploiting Available Free Space Geometry Information and Analyzing the Geometrical Characteristics of the AOI
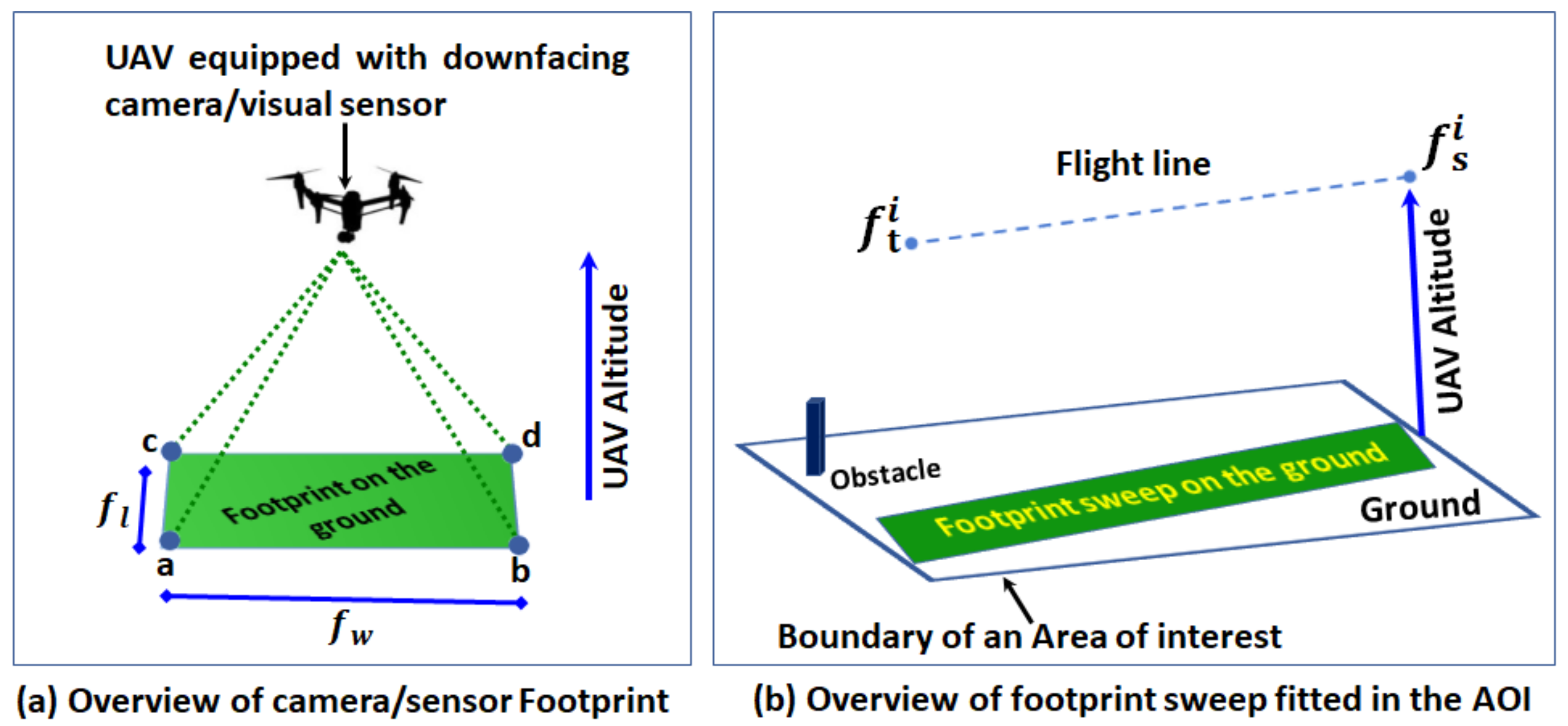
3.4.3. Fitting Sensor/Camera Footprints’ Sweeps in All Traversal Parts of the AOI
3.4.4. Determining the Visiting Sequence of the Footprints’ Sweeps by Formulating and Solving It as TSP
3.4.5. Generation of the Sparse Waypoints Graph by Connecting the Endpoint of Footprints’ Sweeps
| Algorithm 1. Sparse Waypoint Graph Construction from an AOI located in an Urban Environment. |
| Input :(1) inhabiting N obstacles, where and each obstacle has random geometry. (2) Set of sweeps’ visiting sequence, where (3) Set S of the sensor footprints’ sweeps, where and . Output: Sparse waypoints graph Procedure: 1 for every sweep , where = to ∈S do 2 Find the next sweep considering the the optimized visiting sequence (i.e., x values in set ). 3 Figure out the relevant endpoint pair using for the connection 4 if INTERSECTS(,) then 5 Evaluate the obstacle bypassing options values, using the following Equations. 6 Calculate for bypassing from the right: . 7 Calculate for bypassing from the left: . 8 Calculate for bypassing from the top: . 9 Select the appropriate obstacle bypassing option using , where shows the minimum cost required to avoid from the right, left, and top, respectively. 10 Create collision free between sweeps and by acquiring the relevant endpoints. 11 else 12 Create collision free between sweeps and with the relevant endpoints. 13 End if 14 End for 15 return |
3.4.6. Intra-Regional Path Searching over the SWG to Fully Cover an AOI
| Algorithm 2. Coverage pathfinding to fully scan a target area with a UAV-mounted Sensor/Camera. |
| Input :(1) The depot location of the UAV, where . (2) Set of the sweeps’ visiting sequence, where (3) Sparse waypoints graph of the sweeps connections, where . (4) The starting location of the mission in the AOI, where Output :Intra-regional path and mission end location Procedure: 1 Connect the UAV’s depot location with the starting location of the mission in the AOI with a line . 2 for every sweep , where = to ∈ do 3 Find the next sweep considering the the optimized visiting sequence (i.e., x values in set ). 4 Find the connection which connects the and in 5 Traverse all the nodes and lines of the , , and in a BF manner, and record this as . 6 Repeat: steps 3–5 for the next sweep , where is the successor sweep of . 7 Traverse all the nodes and lines of the , , and in a BF manner, and record this as . 8 if lastRound(,) then 9 Traverse all the nodes and lines of the , , and in a BF manner, and record this as . 10 Assign the endpoint of the to the . 11 else 12 Repeat: ∀, find all respective rounds. 13 Assign the endpoint of the to the . 14 End if 15 Add the path information in , where . 16 End for 17 return and |
3.5. Determining the Next Area of Interest to Switch from the Current Area of Interest with the Lowest Possible Cost
3.6. Switching to the Next AOI by Formulating and Solving It as a Traditional Path Planning Problem
3.6.1. Drawing Straight Line from the Exit Location of the Previous AOI to the Beginning Location of the Next AOI
3.6.2. Filtering the Obstacles That Intersect with the Straight Line
| Algorithm 3. Filtering relevant obstacles from the urban environment map. |
| Input :(1) Urban environment map M containing N number of obstacles, where (2) Mission end location () of an AOI (3) Mission beginning location of the AOI Output: Set ℜ of the filtered relevant obstacles Procedure: 1 Initialize:, set ℜ = ∅ 2 Draw straight line between () and () 3 for each , where = to ∈N do 4 if INTERSECTS (, ) then 5 6 End if 7 End for 8 return ℜ |
3.6.3. Finding the Initial Path by Exploiting the Filtered Obstacles’ Geometry Information
3.6.4. Refining the Initial Path by Clustering Nearby Obstacles, and Utilizing the Straight Line’s Point of Intersection Information
3.6.5. Path following for Inter-Region Switching
4. Experimental Evaluation and Discussion
4.1. Performance Comparisons of the Proposed CPP Algorithm in Singular AOI Coverage
4.1.1. Comparisons with the Existing CPP Algorithm Based on Obstacles’ Complexities
4.1.2. Comparisons with the Prior CPP Algorithm Based on the Shape of the Area of Interest
4.1.3. General Comparisons of the Proposed Algorithm with the Existing CPP Algorithms
4.2. Performance Comparisons of the Proposed CPP Algorithm in Multiple AOI Coverage
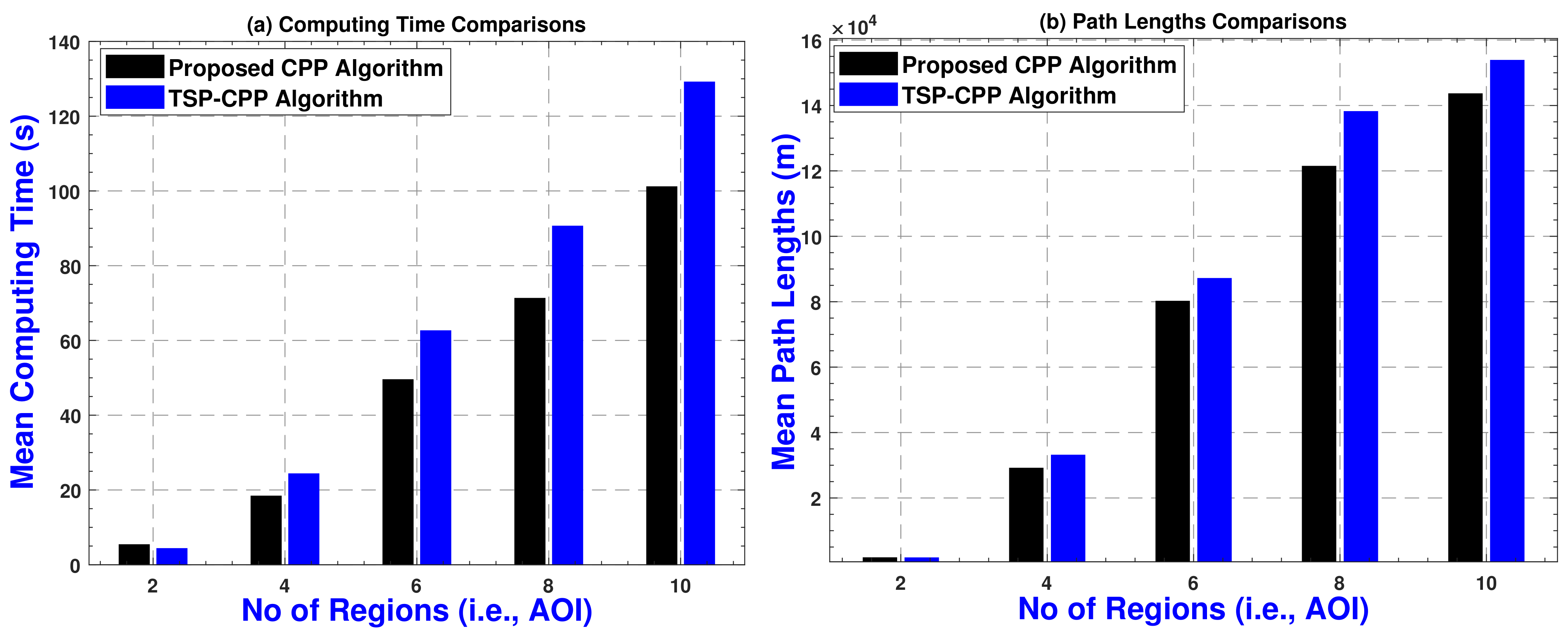
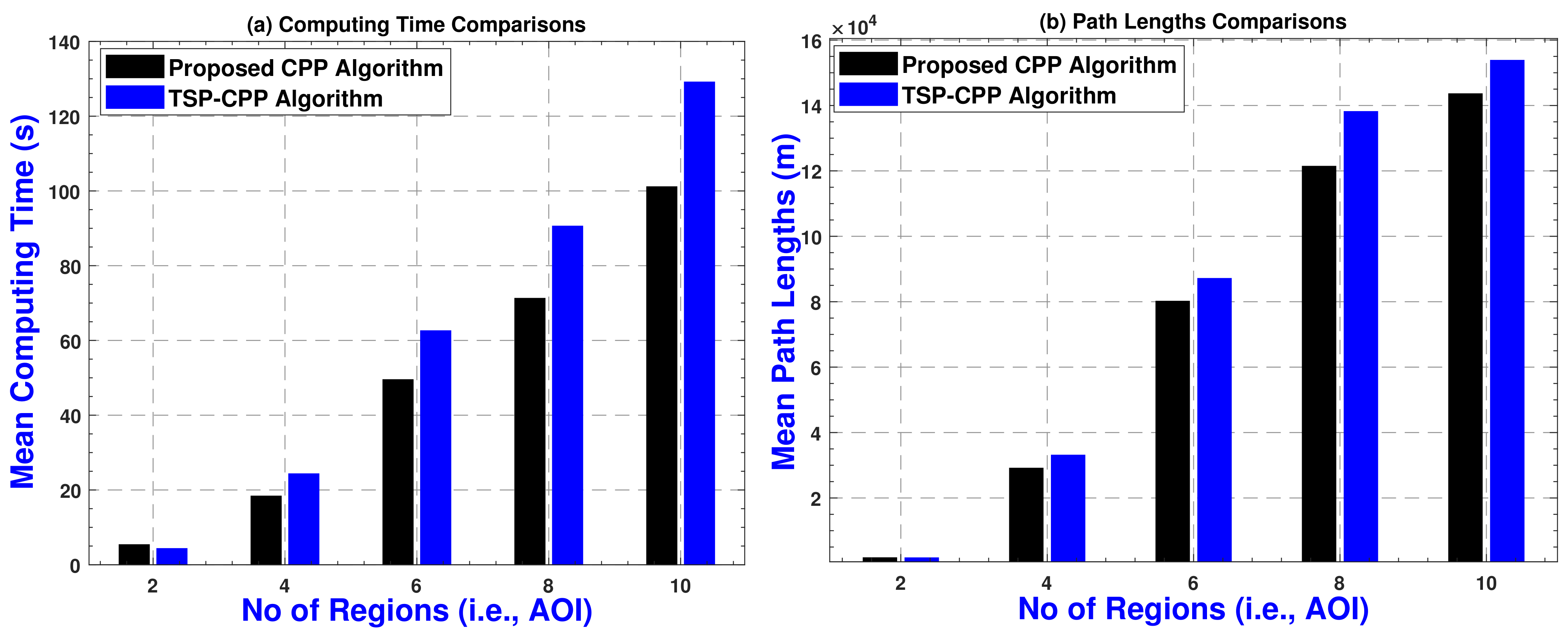
4.2.1. Comparisons with the Prior CPP Algorithm Based on Counts of the Area of Interest
4.2.2. Comparisons with the Prior CPP Algorithm Based on Sizes of the Area of Interest
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, Y.; Qian, Z.; Yang, W. UAV Cluster-Based Video Surveillance System Optimization in Heterogeneous Communication of Smart Cities. IEEE Access 2020, 8, 55654–55664. [Google Scholar] [CrossRef]
- Krishnan, P.S.; Manimala, K. Implementation of optimized dynamic trajectory modification algorithm to avoid obstacles for secure navigation of UAV. Appl. Soft Comput. 2020, 90, 106168. [Google Scholar] [CrossRef]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Qubeijian, W.; Dai, H.; Wang, Q.; Shukla, M.K.; Zhang, W.; Soares, C.G. On Connectivity of UAV-assisted Data Acquisition for Underwater Internet of Things. IEEE Internet Things J. 2020, 7, 5371–5385. [Google Scholar]
- Ullah, S.; Kim, K.I.; Kim, K.H.; Imran, M.; Khan, P.; Tovar, E.; Ali, F. UAV-enabled healthcare architecture: Issues and challenges. Future Gener. Comput. Syst. 2019, 97, 425–432. [Google Scholar] [CrossRef]
- Bognot, J.R.; Candido, C.G.; Blanco, A.C.; Montelibano, J.R.Y. Building construction progress monitoring using unmanned aerial system (UAS), low-cost photogrammetry, and geographic information system (GIS). In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing & Spatial Information Sciences, Riva del Garda, Italy, 4–7 June 2018. [Google Scholar]
- San Juan, V.; Santos, M.; Andújar, J.M. Intelligent UAV Map Generation and Discrete Path Planning for Search and Rescue Operations. Complexity 2018, 2018, 6879419. [Google Scholar] [CrossRef] [Green Version]
- Mansouri, S.S.; Kanellakis, C.; Fresk, E.; Kominiak, D.; Nikolakopoulos, G. Cooperative UAVs as a tool for Aerial Inspection of the Aging Infrastructure. In Field and Service Robotics; Springer: Cham, Switzerland, 2018; pp. 177–189. [Google Scholar]
- Khan, R.; Tausif, S.; Javed Malik, A. Consumer acceptance of delivery drones in urban areas. Int. J. Consum. Stud. 2019, 43, 87–101. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.C. Mobile Solutions to Air Quality Monitoring. In Mobile Solutions and Their Usefulness in Everyday Life; Springer: Cham, Switzerland, 2019; pp. 225–249. [Google Scholar]
- Luo, C.; Miao, W.; Ullah, H.; McClean, S.; Parr, G.; Min, G. Unmanned Aerial Vehicles for Disaster Management. In Geological Disaster Monitoring Based on Sensor Networks; Springer: Singapore, 2019; pp. 83–107. [Google Scholar]
- Hiroyuki, O.; Shibata, H. Applications of UAV Remote Sensing to Topographic and Vegetation Surveys. In Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Springer: Cham, Switzerland, 2020; pp. 131–142. [Google Scholar]
- Maitiniyazi, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar]
- Fu, C.; Lin, F.; Li, Y.; Chen, G. Correlation filter-based visual tracking for UAV with Online multi-feature learning. Remote Sens. 2019, 5, 549. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, S.; Calafate, C.T.; Cano, J.; Manzoni, P.; Toh, C.K. A UAV-based content delivery architecture for rural areas and future smart cities. IEEE Internet Comput. 2018, 1, 29–36. [Google Scholar] [CrossRef]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Yao, P.; Cai, Y.; Zhu, Q. Time-optimal trajectory generation for aerial coverage of urban building. Aerosp. Sci. Technol. 2019, 84, 387–398. [Google Scholar] [CrossRef]
- Dai, R.; Fotedar, S.; Radmanesh, M.; Kumar, M. Quality-aware UAV coverage and path planning in geometrically complex environments. Ad Hoc Netw. 2018, 73, 95–105. [Google Scholar] [CrossRef]
- Bircher, A.; Kamel, M.; Alexis, K.; Burri, M.; Oettershagen, P.; Omari, S.; Mantel, T.; Siegwart, R. Three-dimensional coverage path planning via viewpoint resampling and tour optimization for aerial robots. Auton. Robot. 2016, 40, 1059–1078. [Google Scholar] [CrossRef]
- Kim, D.; Liu, M.; Lee, S.; Kamat, V.R. Remote proximity monitoring between mobile construction resources using camera-mounted UAVs. Autom. Constr. 2019, 99, 168–182. [Google Scholar] [CrossRef]
- Oliveira, R.A.; Tommaselli, A.M.; Honkavaara, E. Generating a hyperspectral digital surface model using a hyperspectral 2D frame camera. ISPRS J. Photogramm. Remote Sens. 2019, 147, 345–360. [Google Scholar] [CrossRef]
- Lingelbach, F. Path planning using probabilistic cell decomposition. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 467–472. [Google Scholar]
- Wong, S. Qualitative Topological Coverage of Unknown Environments by Mobile Robots. Ph.D. Thesis, The University of Auckland, Auckland, New Zealand, 2006. [Google Scholar]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse decompositions for coverage tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Butler, Z.J.; Rizzi, A.A.; Hollis, R.L. Contact sensor-based coverage of rectilinear environments. In Proceedings of the 1999 IEEE International Symposium on Intelligent Control/Intelligent Systems and Semiotics, Cambridge, MA, USA, 17 September 1999; pp. 266–271. [Google Scholar]
- Shivashankar, V.; Jain, R.; Kuter, U.; Nau, D.S. Real-Time Planning for Covering an Initially-Unknown Spatial Environment. In Proceedings of the Twenty-Fourth International Florida Artificial Intelligence Research Society Conference, Palm Beach, FL, USA, 18–20 May 2011. [Google Scholar]
- Xu, L. Graph Planning for Environmental Coverage. Ph.D. Thesis, Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, USA, 2011. [Google Scholar]
- Cabreira, T.M.; Di Franco, C.; Ferreira, P.R.; Buttazzo, G.C. Energy-Aware Spiral Coverage Path Planning for UAV Photogrammetric Applications. IEEE Robot. Autom. Lett. 2018, 3, 3662–3668. [Google Scholar] [CrossRef]
- Li, Y.; Chen, H.; Er, M.J.; Wang, X. Coverage path planning for UAVs based on enhanced exact cellular decomposition method. Mechatronics 2011, 21, 876–885. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N.; Kersten, J.; Taraben, J.; Debus, P.; Helmrich, M.; Rodehorst, V. Framework for automated UAS-based structural condition assessment of bridges. Autom. Constr. 2019, 97, 77–95. [Google Scholar] [CrossRef]
- Nasr, S.; Mekki, H.; Bouallegue, K. A multi-scroll chaotic system for a higher coverage path planning of a mobile robot using flatness controller. Chaos Solitons Fractals 2019, 118, 366–375. [Google Scholar] [CrossRef]
- Coombes, M.; Fletcher, T.; Chen, W.H.; Liu, C. Optimal polygon decomposition for UAV survey coverage path planning in wind. Sensors 2018, 18, 2132. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K.; Jensen, A.L.; Sørensen, C.G.; Busato, P.; Bothtis, D.D. Agricultural operations planning in fields with multiple obstacle areas. Comput. Electron. Agric. 2014, 109, 12–22. [Google Scholar] [CrossRef]
- Montanari, A.; Kringberg, F.; Valentini, A.; Mascolo, C.; Prorok, A. Surveying Areas in Developing Regions Through Context Aware Drone Mobility. In Proceedings of the 4th ACM Workshop on Micro Aerial Vehicle NetworksSystems, and Applications, Munich, Germany, 10–15 June 2018; ACM: New York, NY, USA, 2018; pp. 27–32. [Google Scholar]
- Valente, J.; Del Cerro, J.; Barrientos, A.; Sanz, D. Aerial coverage optimization in precision agriculture management: A musical harmony inspired approach. Comput. Electron. Agric. 2013, 99, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Cabreira, T.; Brisolara, L.; Ferreira, P.R. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.L.; Huang, Y.; Hall, E.L. Region filling operations with random obstacle avoidance for mobile robots. J. Robot. Syst. 1988, 5, 87–102. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Choset, H.M.; Hutchinson, S.; Lynch, K.M.; Kantor, G.; Burgard, W.; Kavraki, L.E.; Thrun, S. Principles of Robot Motion: Theory, Algorithms, and Implementation; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Choset, H. Coverage of known spaces: The boustrophedon cellular decomposition. Auton. Robots 2000, 9, 247–253. [Google Scholar] [CrossRef]
- Milnor, J.W.; Spivak, M.; Wells, R.; Wells, R. Morse Theory; Princeton University Press: Princeton, NJ, USA, 1963. [Google Scholar]
- Nam, L.H.; Huang, L.; Li, X.J.; Xu, J.F. An approach for coverage path planning for UAVs. In Proceedings of the 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016; pp. 411–416. [Google Scholar]
- Bochkarev, S.; Smith, S.L. On minimizing turns in robot coverage path planning. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), FortWorth, TX, USA, 21–25 August 2016; pp. 1237–1242. [Google Scholar]
- Lee, T.K.; Baek, S.H.; Choi, Y.H.; Oh, S.Y. Smooth coverage path planning and control of mobile robots based on high-resolution grid map representation. Robot. Auton. Syst. 2011, 59, 801–812. [Google Scholar] [CrossRef]
- Lin, L.; Goodrich, M.A. Hierarchical heuristic search using a Gaussian Mixture Model for UAV coverage planning. IEEE Trans. Cybern. 2014, 44, 2532–2544. [Google Scholar] [CrossRef]
- Andersen, H.L. Path Planning for Search and Rescue Mission Using Multicopters. Master’s Thesis, Institutt for Teknisk Kybernetikk, Trondheim, Norway, 2014. [Google Scholar]
- Larranaga, P.; Kuijpers, C.M.H.; Murga, R.H.; Inza, I.; Dizdarevic, S. Genetic algorithms for the travelling salesman problem: A review of representations and operators. Artif. Intell. Rev. 1999, 13, 129–170. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Fu, Y.; Ding, M.; Zhou, C.; Hu, H. Route planning for unmanned aerial vehicle (UAV) on the sea using hybrid differential evolution and quantum-behaved particle swarm optimization. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 1451–1465. [Google Scholar] [CrossRef]
- Nash, A.; Daniel, K.; Koenig, S.; Felner, A. Theta*: Any-Angle Path Planning on Grids. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 22–26 July 2007; pp. 1177–1183. [Google Scholar]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.C.; Yuta, S. Planning paths of complete coverage of an unstructured environment by a mobile robot. In Proceedings of the International Conference on Advanced Robotics, Tsukuba, Japan, 8–9 November 1993; Volume 13, pp. 533–538. [Google Scholar]
- Yu, X.; Chen, W.N.; Gu, T.; Yuan, H.; Zhang, H.; Zhang, J. ACO-A*: Ant Colony Optimization Plus A* for 3D Traveling in Environments with Dense Obstacles. IEEE Trans. Evol. Comput. 2018, 23, 617–631. [Google Scholar] [CrossRef]
- Öst, G. Search Path Generation with UAV Applications Using Approximate Convex Decomposition. Master’s Thesis, Linkoping University, Linkoping, Sweden, 2012. [Google Scholar]
- Xu, A.; Viriyasuthee, C.; Rekleitis, I. Optimal complete terrain coverage using an unmanned aerial vehicle. In Proceedings of the 2011 IEEE International Conference On Robotics and automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2513–2519. [Google Scholar]
- Jiao, Y.S.; Wang, X.M.; Chen, H.; Li, Y. Research on the coverage path planning of uavs for polygon areas. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications (ICIEA), Taichung, Taiwan, 15–17 June 2010; pp. 1467–1472. [Google Scholar]
- Levcopoulos, C.; Krznaric, D. Quasi-Greedy Triangulations Approximating the Minimum Weight Triangulation. In Proceedings of the Seventh Annual ACM-SIAM Symposium on Discrete Algorithms, Atlanta, GA, USA, 28–30 January 1996; pp. 392–401. [Google Scholar]
- Coombes, M.; Chen, W.-H.; Liu, C. Boustrophedon coverage path planning for UAV aerial surveys in wind. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1563–1571. [Google Scholar]
- Li, D.; Wang, X.; Sun, T. Energy-optimal coverage path planning on topographic map for environment survey with unmanned aerial vehicles. Electron. Lett. 2016, 9, 699–701. [Google Scholar] [CrossRef]
- Artemenko, O.; Dominic, O.J.; Andryeyev, O.; Mitschele-Thiel, A. Energy-aware trajectory planning for the localization of mobile devices using an unmanned aerial vehicle. In Proceedings of the 2016 25th International Conference on Computer Communication and Networks (ICCCN), Waikoloa, HI, USA, 1–4 August 2016; pp. 1–9. [Google Scholar]
- Ahmadzadeh, A.; Keller, J.; Pappas, G.; Jadbabaie, A.; Kumar, V. An optimization-based approach to time-critical cooperative surveillance and coverage with UAVS. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 491–500. [Google Scholar]
- Forsmo, E.J.; Grøtli, E.I.; Fossen, T.I.; Johansen, T.A. Optimal search mission with unmanned aerial vehicles using mixed integer linear programming. In Proceedings of the 2013 International conference on unmanned aircraft systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 253–259. [Google Scholar]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Xu, A.; Viriyasuthee, C.; Rekleitis, I. Efficient complete coverage of a known arbitrary environment with applications to aerial operations. Auton. Robots 2014, 36, 365–381. [Google Scholar] [CrossRef]
- Acevedo, J.J.; Arrue, B.C.; Diaz-Bañez, J.M.; Ventura, I.; Maza, I.; Ollero, A. One-to-one coordination algorithm for decentralized area partition in surveillance missions with a team of aerial robots. J. Intell. Robot. Syst. 2014, 74, 269–285. [Google Scholar] [CrossRef]
- Vincent, P.; Rubin, I. A Framework and Analysis for Cooperative Search Using UAV Swarms. In Proceedings of the 2004 ACM Symposium on Applied Computing, Nicosia, Cyprus, 14–17 March 2004; pp. 79–86. [Google Scholar]
- Valente, J.; Sanz, D.; Del Cerro, J.; Barrientos, A.; de Frutos, M.Á. Near-optimal coverage trajectories for image mosaicing using a mini quad-rotor over irregular-shaped fields. Prec. Agric. 2013, 14, 115–132. [Google Scholar] [CrossRef]
- Xiao, S.; Tan, X.; Wang, J. A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction. Electronics 2021, 10, 853. [Google Scholar] [CrossRef]
- Sadat, S.A.; Wawerla, J.; Vaughan, R. Fractal trajectories for online non-uniform aerial coverage. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2971–2976. [Google Scholar]
- Sadat, S.A.; Wawerla, J.; Vaughan, R.T. Recursive non-uniform coverage of unknown terrains for uavs. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 1742–1747. [Google Scholar]
- Trujillo, M.M.; Darrah, M.; Speransky, K.; DeRoos, B.; Wathen, M. Optimized Flight Path for 3D Mapping of An Area with Structures Using A Multirotor. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 905–910. [Google Scholar]
- Hayat, S.; Yanmaz, E.; Brown, T.X.; Bettstetter, C. Multi-Objective UAV Path Planning for Search and Rescue. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Piscataway, NJ, USA, 29 May–3 June 2017; pp. 5569–5574. [Google Scholar]
- Rosalie, M.; Dentler, J.E.; Danoy, G.; Bouvry, P.; Kannan, S.; Olivares-Mendez, M.A.; Voos, H. Area Exploration with A Swarm of UAVs Combining Deterministic Chaotic Ant Colony Mobility with Position MPC. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1392–1397. [Google Scholar]
- Majeed, A.; Lee, S. A new coverage flight path planning algorithm based on footprint sweep fitting for unmanned aerial vehicle navigation in urban environments. Appl. Sci. 2019, 9, 1470. [Google Scholar] [CrossRef] [Green Version]
- Bouzid, Y.; Bestaoui, Y.; Siguerdidjane, H. Quadrotor-UAV optimal coverage path planning in cluttered environment with a limited onboard energy. In Proceedings of the Intelligent Robots and Systems (IROS), 2017 IEEE/RSJ International Conference, Vancouver, BC, Canada, 24–28 September 2017; pp. 979–984. [Google Scholar]
- Xie, J.; Jin, L.; Garcia Carrillo, L.R. Optimal Path Planning for Unmanned Aerial Systems to Cover Multiple Regions. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1794. [Google Scholar]
- Li, J.; Chen, J.; Wang, P.; Li, C. Sensor-oriented path planning for multiregion surveillance with a single lightweight UAV SAR. Sensors 2018, 18, 548. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Savkin, A. Towards the Internet of Flying Robots: A Survey. Sensors 2018, 18, 4038. [Google Scholar] [CrossRef] [Green Version]
- Vasquez-Gomez, J.I.; Herrera-Lozada, J.C.; Olguin-Carbajal, M. Coverage Path Planning for Surveying Disjoint Areas. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 899–904. [Google Scholar]
- Xie, J.; Carrillo, L.R.G.; Jin, L. Path Planning for UAV to Cover Multiple Separated Convex Polygonal Regions. IEEE Access 2020, 8, 51770–51785. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Decomposition Type | Shape of the AOI | Detailed Comparison of State-of-the Art Coverage Path Planning Approaches | ||||
|---|---|---|---|---|---|---|
| Evaluation Criteria | CPP for | Approach | Agent Type | Representative Methods | ||
| No decomposition | Polygonal 3D Topology Regular Grids Rectangular Rectangular | Flight time Energy consumption Energy consumption and Mission time Coverage rate and time Flight time | Single UAV Single UAV Single UAV Multiple UAVs Multiple UAVs | Back and forth CPP Three-stage Energy-aware CPP E-MoTA e I-MoTA Dynamic programming MILP approach | Fixed wing Rotary wing Both Fixed wing Fixed wing | Coombes et al. [58] Li et al. [59] Artemenko et al. [60] Ahmadzadeh et al. [61] Forsmo et al. [62] |
| Exact cellular decomposition | Polygonal Irregular Polygonal Irregular Rectangular | Number of turns and path length Path length and coverage time Number of turning maneuvers Interval of visits and information latency Target detection and search time | Single UAV Single UAV Single UAV Multiple UAVs Multiple UAVs | Back-and-Forth CPP Back-and-Forth CPP Back-and-Forth CPP One-to-one coordination Line Formation-based CPP | Rotary wing Fixed wing Both Both Rotary wing | Torres et al. [63] Xu et al. [64] Li et al. [29] Acevedo et al. [65] Vincent et al. [66] |
| Approximate cellular decomposition | Irregular/Regular Grid Regular Grid Square Square Polygonal Rectangular Regular Grid 3D cube (building) | Coverage time Path length Total distance of the coverage Total distance of the coverage Path length Mission completion time Coverage rate and coverage ratio Computing time | Single UAV Single UAV Single UAV Single UAV Single UAV Multiple UAVs Multiple UAVs Single UAV | Gradient-based CPP Simulated annealing Hilbert space-filling curves BFS, DFS, and SH Genetic Algorithm Multi-Objective CPP with GA Chaotic ACO algorithm TOGVF transition | Rotary wing Rotary wing Rotary wing Rotary wing Rotary wing Rotary wing Rotary wing Both | Valente et al. [67] Xiao et al. [68] Sadat et al. [69] Sadat et al. [70] Trujillo et al. [71] Hayat et al. [72] Rosalie et al. [73] Yao et al. [17] |
| Constraints Type | Constraint Name | Constraints Values | |
|---|---|---|---|
| Numerical | Non-Numerical | ||
| Local | Wing span UAV size Steering angle Wind’s affect Available energy/battery Footprint sweep’s width Footprint sweep’s length Maximum UAV flight height limits Minimum UAV flight height limits | 1 m 25 kg radius - - 20 m 30 m 155 m 25 m | - - - No-affect (zero-wind scenarios) Sufficient for whole coverage mission - - - - |
| Global | UAV workspace Obstacle’s geometry information Obstacles’ placement and sizes Safe distance from obstacles | - - - - 10 m | Urban areas Fully-known Random - |
| Map id | Area of Intrest Size | Obstacles Density | CA-CPP Algorithm [63] Results | Proposed-CPP Algorithm Results | ||
|---|---|---|---|---|---|---|
| Avg. Computing Time (s) | Avg. Path Length (m) | Avg. Computing Time (s) | Avg. Path Length (m) | |||
| Map 1 | 500 × 600 × 300 | Low Medium High | 6.07 11.47 20.49 | 9518.08 8460.47 7609.68 | 5.04 9.58 17.01 | 9152.50 8135.40 7317.19 |
| Map 2 | 1000 × 1200 × 300 | Low Medium High | 10.15 20.22 26.32 | 40,665.13 35,753.12 34,278.49 | 8.48 16.53 21.93 | 38,914.02 34,378.51 32,960.98 |
| Map 3 | 1200 × 1400 × 300 | Low Medium High | 13.45 22.40 29.81 | 57,830.31 56,047.68 52,140.4 | 11.24 18.72 24.91 | 55,340.24 53,892.23 50,130.08 |
| Map 4 | 1500 × 1500 × 400 | Low Medium High | 18.09 26.72 35.76 | 76,504.45 72,846.82 72,644.25 | 15.12 22.33 29.88 | 73,210.21 70,040.32 69,840.89 |
| Map 5 | 2000 × 2000 × 400 | Low Medium High | 20.41 33.50 37.92 | 133,866.59 126,360.78 122,304.78 | 17.05 27.88 31.54 | 128,100.45 121,400.11 117,500.92 |
| Coverage Algorithms | Evaluation Criteria | Map id (Area of Interest Size) | ||||
|---|---|---|---|---|---|---|
| 1 (500 × 600 × 300) | 2 (1000 × 1200 × 300) | 3 (1200 × 1400 × 300) | 4 (1500 × 1500 × 400) | 5 (2000 × 2000 × 400) | ||
| CA-CPP Algorithm [63] | Avg. path overlapping (m) Avg. number of turning maneuver | 119.09 116 | 278.07 210 | 1090.15 223 | 1351.08 238 | 2079.11 318 |
| Proposed CPP algorithm | Avg. path overlapping (m) Avg. number of turning maneuver | 160.69 104 | 291.72 199 | 911.85 211 | 1223.02 227 | 1967.05 316 |
| Coverage Algorithms | Shape of the Area of Interest | Evaluation Criteria (s) | |||
|---|---|---|---|---|---|
| Avg. Path Length (m) | Avg. Computing Time (s) | Avg. Path Overlapping (m) | Avg. Turning Maneuvers | ||
| CA-CPP Algorithm [63] | Square Rectangle Polygon (convex) Polygon (non-convex) Irregular | 70,904.37 8451.67 52,000.22 55,824.41 48,762.62 | 28.36 13.84 22.03 32.21 21.205 | 1259.31 179.35 684.88 775.35 988.91 | 51 55 52 95 103 |
| Proposed CPP Algorithm | Square Rectangle Polygon (convex) Polygon (non-convex) Irregular | 67,220.92 7905.12 51,098.11 53,915.78 46,591.09 | 17.15 8.88 15.19 21.91 13.10 | 1041.22 164.09 614.04 701.05 948.31 | 35 45 47 79 84 |
| AOI Sizes | Evaluation Criteria | Coverage Algorithms | Number of the Areas of Interest (i.e., Regions) Located in Urban Environments | ||||
|---|---|---|---|---|---|---|---|
| 2 | 4 | 6 | 8 | 10 | |||
| Small-sized | Computing Time, Path Length | TSP-CPP Algorithm [80] Proposed CPP algorithm | 2.9 s, 1505.32 m 3.27 s, 1519.92 m | 11.76 s, 2039.56 m 8.52 s, 1921.12 m | 18.25 s, 2832.23 m 13.67 s, 2532.23 m | 27.32 s, 3656.23 m 19.32 s, 3023.45 m | 35.81 s, 4123.45 m 25.21 s, 3412.34 m |
| Medium-sized | Computing Time, Path Length | TSP-CPP Algorithm [80] Proposed CPP algorithm | 5.69 s, 1815.12 m 6.27 s, 1829.12 m | 16.61 s, 2409.06 m 12.32 s, 2321.02 m | 26.59 s, 3372.13 m 20.56 s, 3052.23 m | 39.72 s, 4506.21 m 30.92 s, 4003.15 m | 55.01 s, 5313.95 m 41.28 s, 4902.14 m |
| Large-sized | Computing Time, Path Length | TSP-CPP Algorithm [80] Proposed CPP algorithm | 10.19 s, 2319.02 m 11.87 s, 2321.19 m | 25.01 s, 2999.16 m 20.52 s, 2901.12 m | 37.95 s, 4170.03 m 30.51 s, 3852.93 m | 54.02 s, 5500.31 m 44.02 s, 5010.05 m | 76.91 s, 7123.02 m 60.31 s, 6512.24 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majeed, A.; Hwang, S.O. A Multi-Objective Coverage Path Planning Algorithm for UAVs to Cover Spatially Distributed Regions in Urban Environments. Aerospace 2021, 8, 343. https://doi.org/10.3390/aerospace8110343
Majeed A, Hwang SO. A Multi-Objective Coverage Path Planning Algorithm for UAVs to Cover Spatially Distributed Regions in Urban Environments. Aerospace. 2021; 8(11):343. https://doi.org/10.3390/aerospace8110343
Chicago/Turabian StyleMajeed, Abdul, and Seong Oun Hwang. 2021. "A Multi-Objective Coverage Path Planning Algorithm for UAVs to Cover Spatially Distributed Regions in Urban Environments" Aerospace 8, no. 11: 343. https://doi.org/10.3390/aerospace8110343
APA StyleMajeed, A., & Hwang, S. O. (2021). A Multi-Objective Coverage Path Planning Algorithm for UAVs to Cover Spatially Distributed Regions in Urban Environments. Aerospace, 8(11), 343. https://doi.org/10.3390/aerospace8110343