
Design and Verification of Flush Air Data Sensing Module with Navigation and Temperature Information

Abstract
1. Introduction
2. Whole Scheme Design
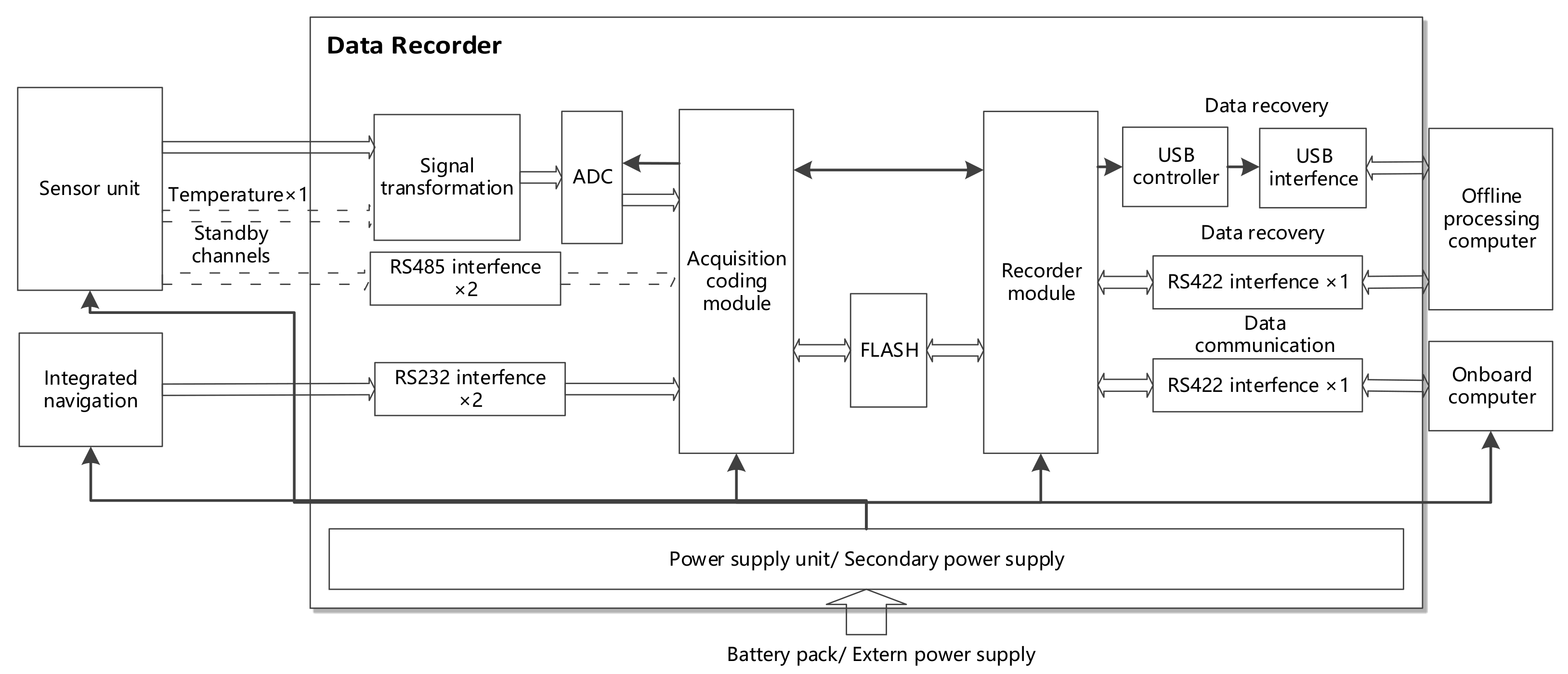
2.1. Hardware Structure
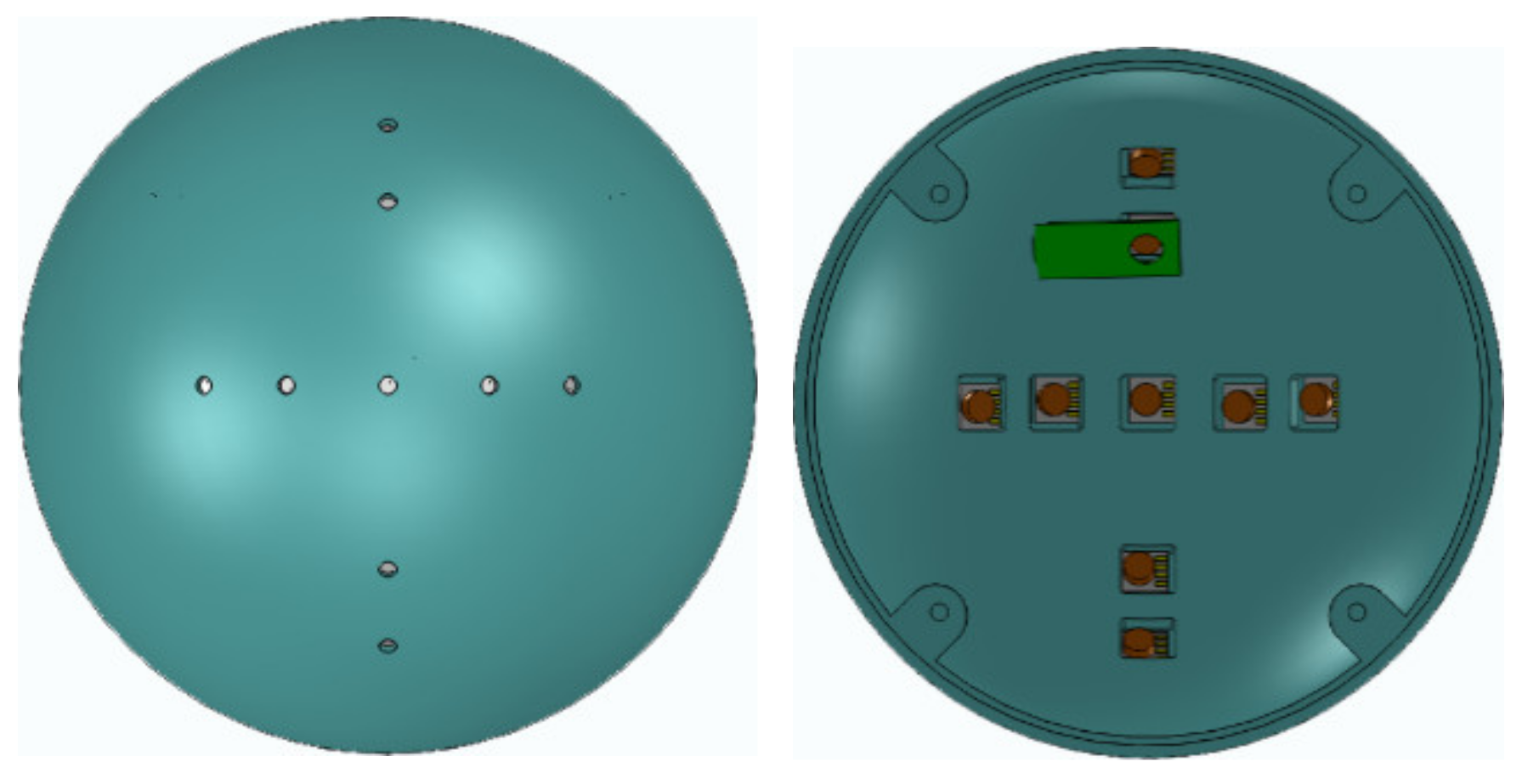
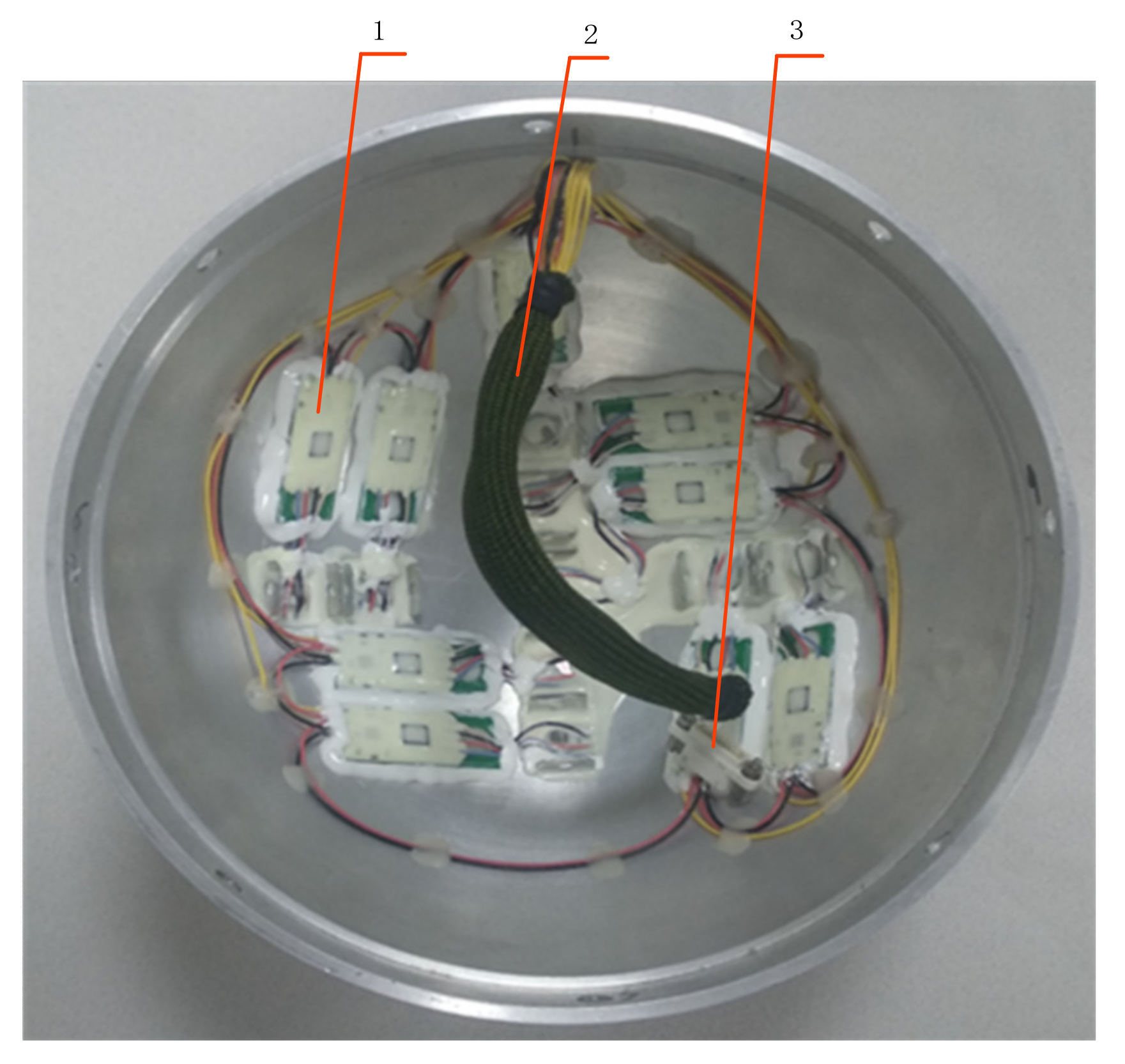
2.2. Pressure Sensors Layout Design
2.3. Electrical Scheme Design
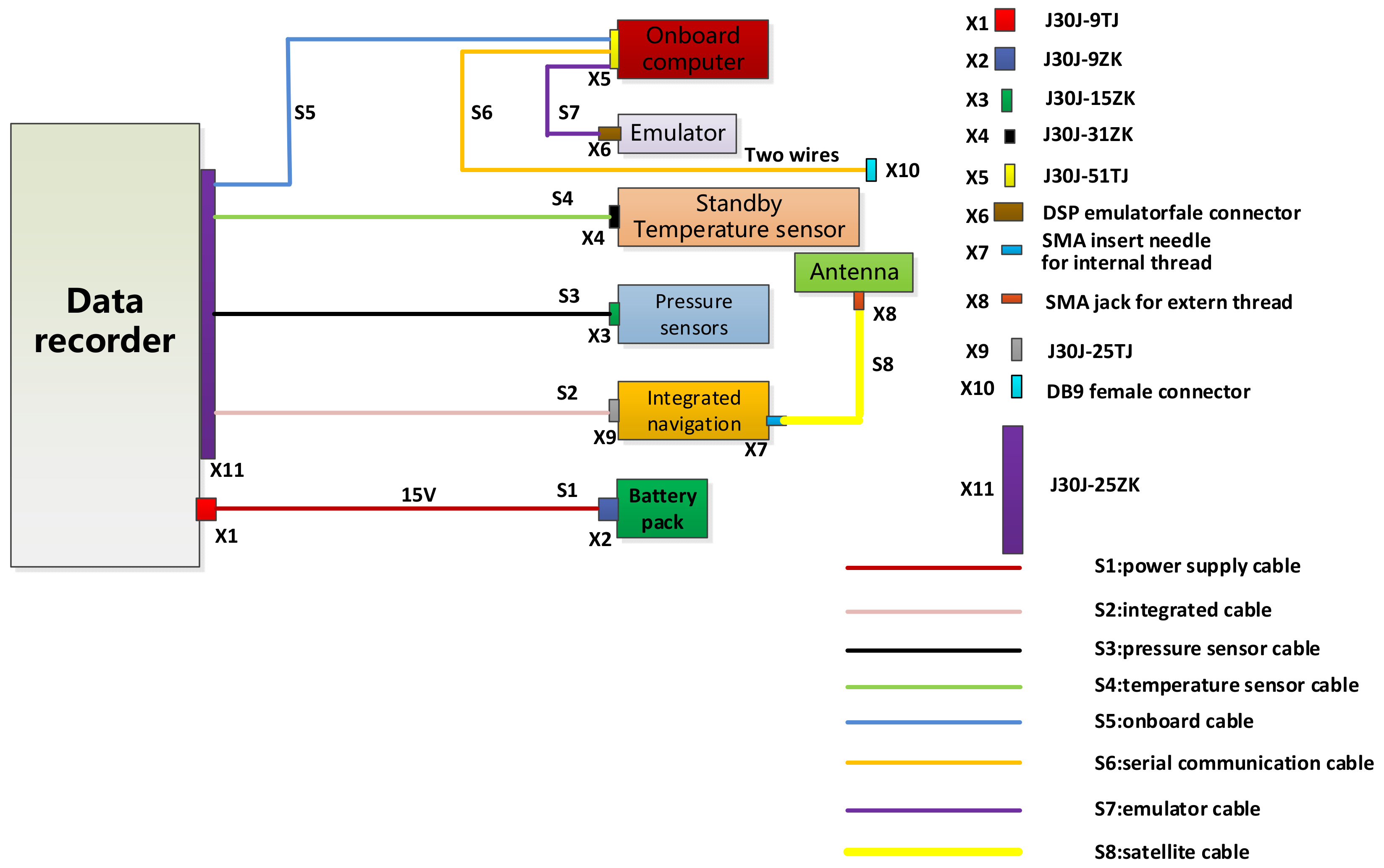
2.4. Cable Network Design
2.5. System Workflow
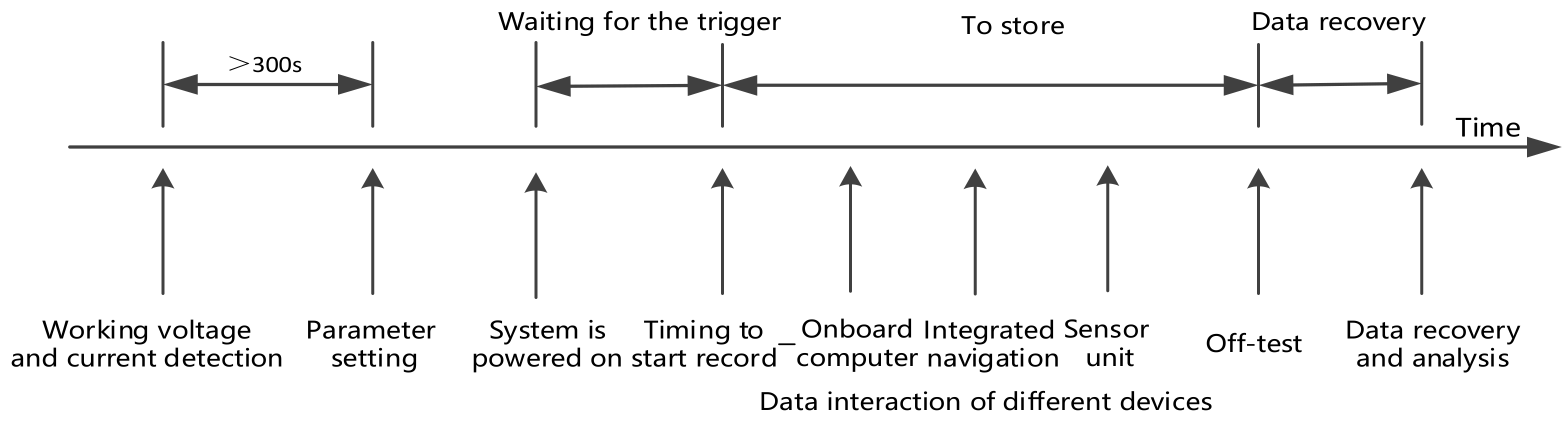
- (1)
- To check working voltage, current and set initial working parameters;
- (2)
- To start the timer and wait for its trigger;
- (3)
- When the timer triggers, the data recorder starts to collect and record data and supply power to the onboard computer, sensors and integrated navigation unit;
- (4)
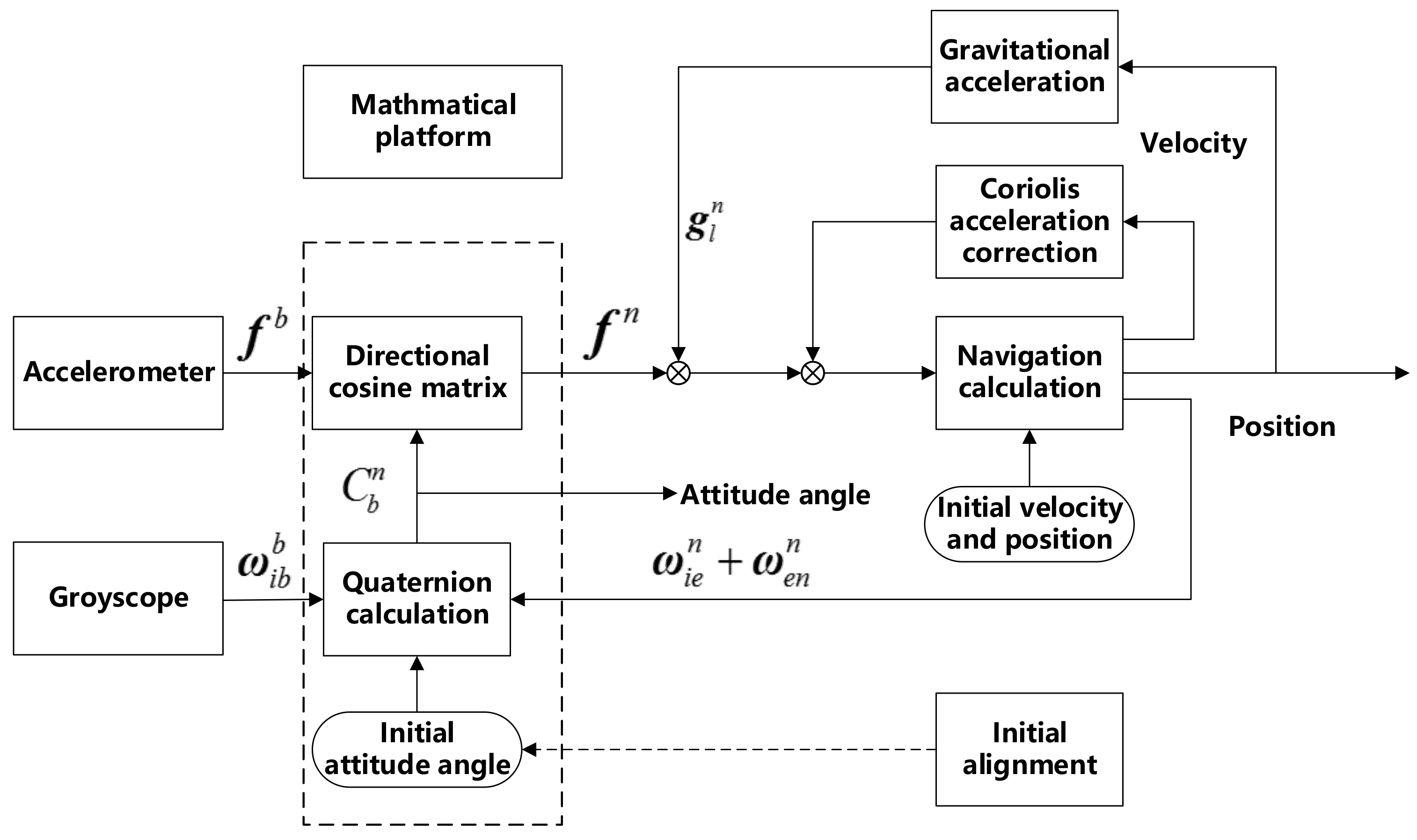
- When the whole system begins to work, the pressure sensors measure the atmospheric pressure and the temperature sensor measures the atmospheric temperature with analog signals in real time. The data recorder will convert these analog signals from the sensors into digital signals, which are divided into two channels, one channel of data is connected to the onboard computer, while another channel of data is stored in the flash memory of the data recorder. The navigation system will get navigation information and transmit it to the onboard computer and data recorder. The onboard computer will mix data from the various devices together and calculate the angle of attack, angle of sideslip, dynamic pressure, static pressure, Mach number and so on, and the calculated data is transmitted to the data recorder for storage in real time;
- (5)
- When an experiment is finished, the data from the data recorder is recovered by the processing software in the offline processing computer. Recovered data can be analyzed to optimize the system iteratively. The system workflow is shown in Figure 8.
3. Atmospheric Parameter Calculation Algorithm
3.1. Calculation of the Angle of Attack and Angle of Sideslip
3.2. Calculation of the Mach Number
3.3. Calculation of the Dynamic Pressure and Static Pressure
3.4. Calculation of the Shape Coefficient and Atmospheric Density
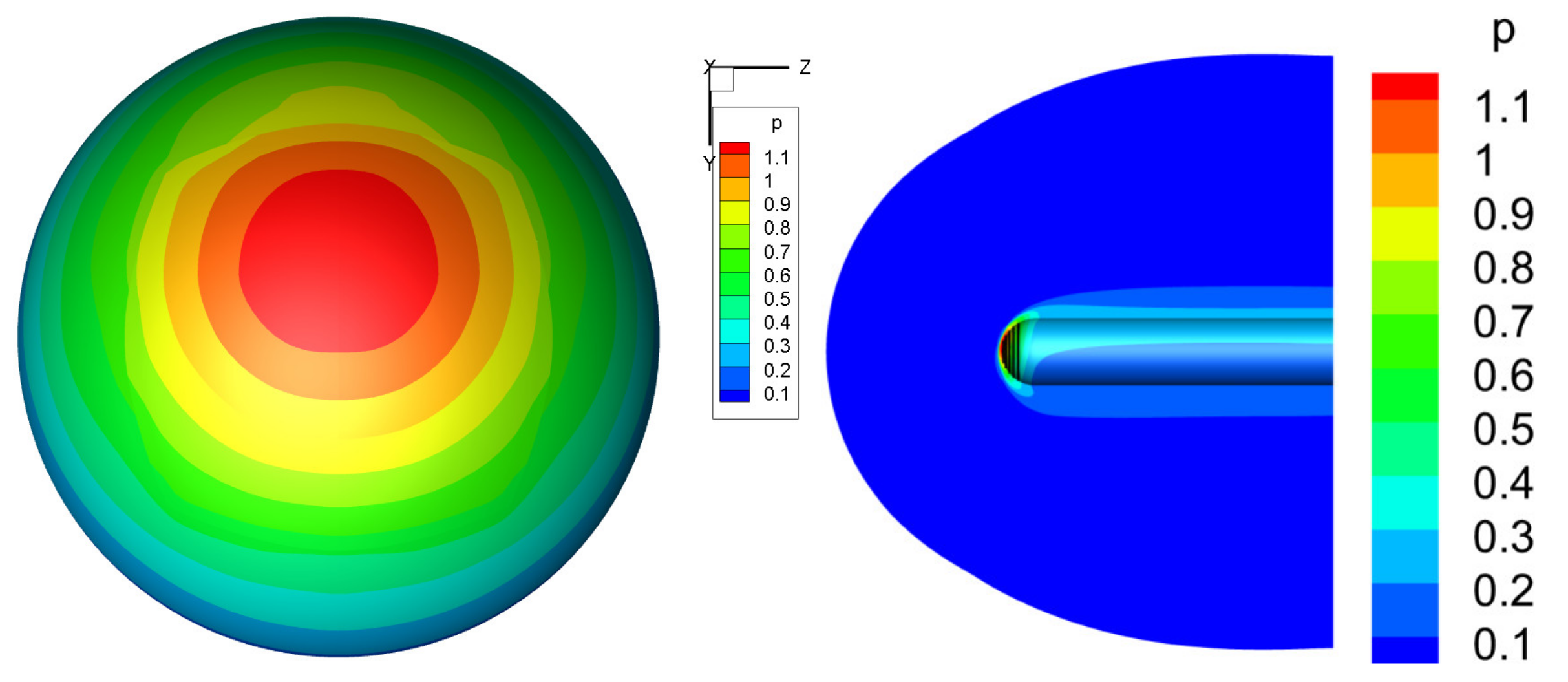
4. Flow Field Simulation Analysis
5. Experimental Verification
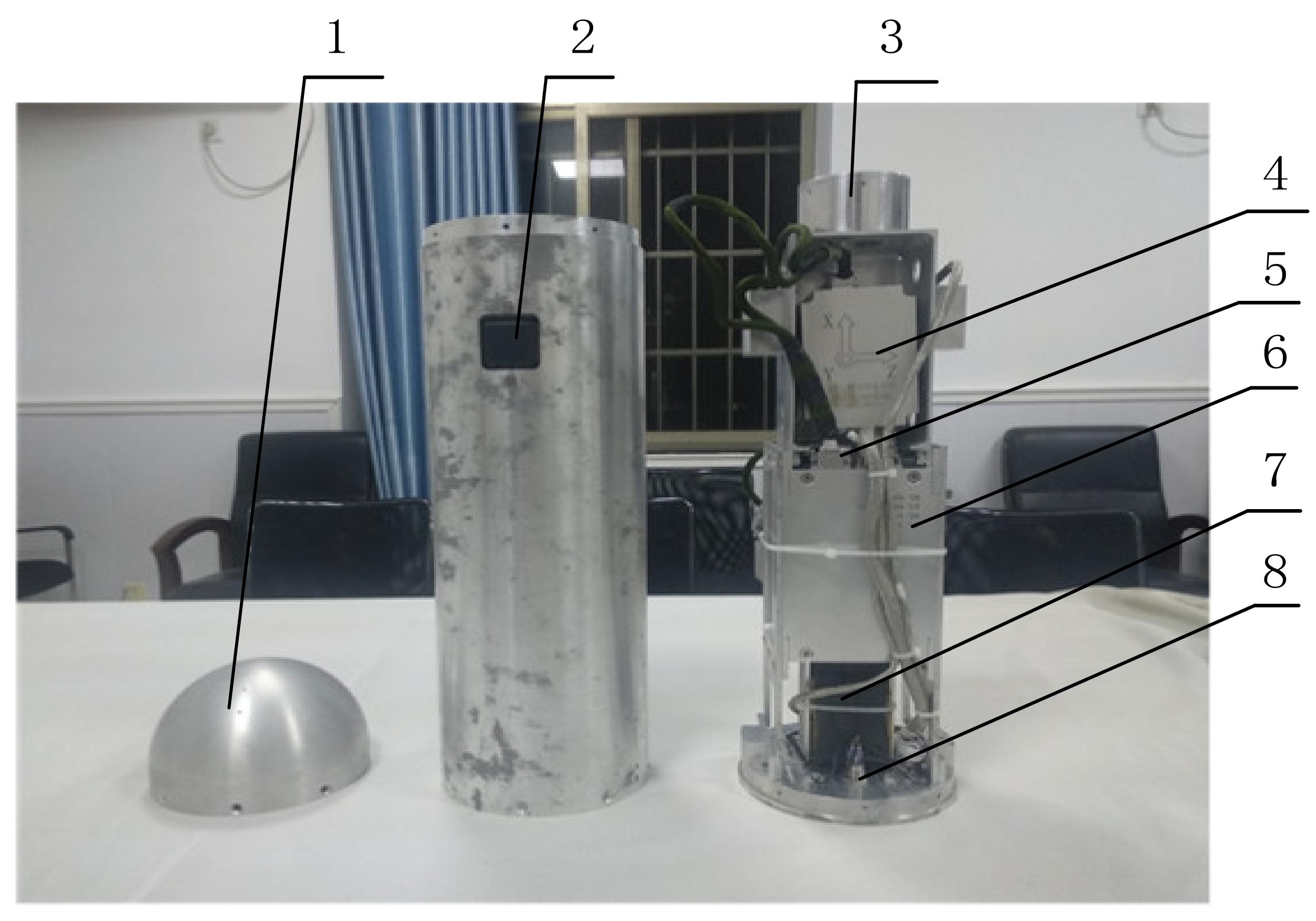
5.1. Physical Assembly
5.2. Test Workflow
5.3. Static Calculation Test
5.4. Dynamic Calculation Test
5.5. Engineering Application
6. Conclusions
- (1)
- The traditional three-point method is improved to integrate navigation information and temperature information for parameter calculation. The classical three-point algorithm uses pressure sensors and determines the shape coefficient through wind tunnel experiments to calculate the dynamic pressure, static pressure and Mach number. Wind tunnel experiments require high precision devices and costly operations. A new algorithm is proposed with pressure sensors, temperature sensors and an integrated navigation system to calculate the angle of attack, angle of sideslip, dynamic pressure, static pressure, Mach number, atmospheric density and shape coefficient. It is more convenient for calculating the required parameters with good real-time performance relative to the classic three-point algorithm. The proposed algorithm can obtain more useful parameters relative to the classic three-point algorithm with bright prospects. The proposed algorithm is verified by flow field simulation analysis and experimental tests, in which it can be seen that the simulated and experimental results are consistent with the theoretical analysis. It can provide a reference for prospective wind tunnel experiments and flight tests, and better calculation results can be obtained by the fusion of various data;
- (2)
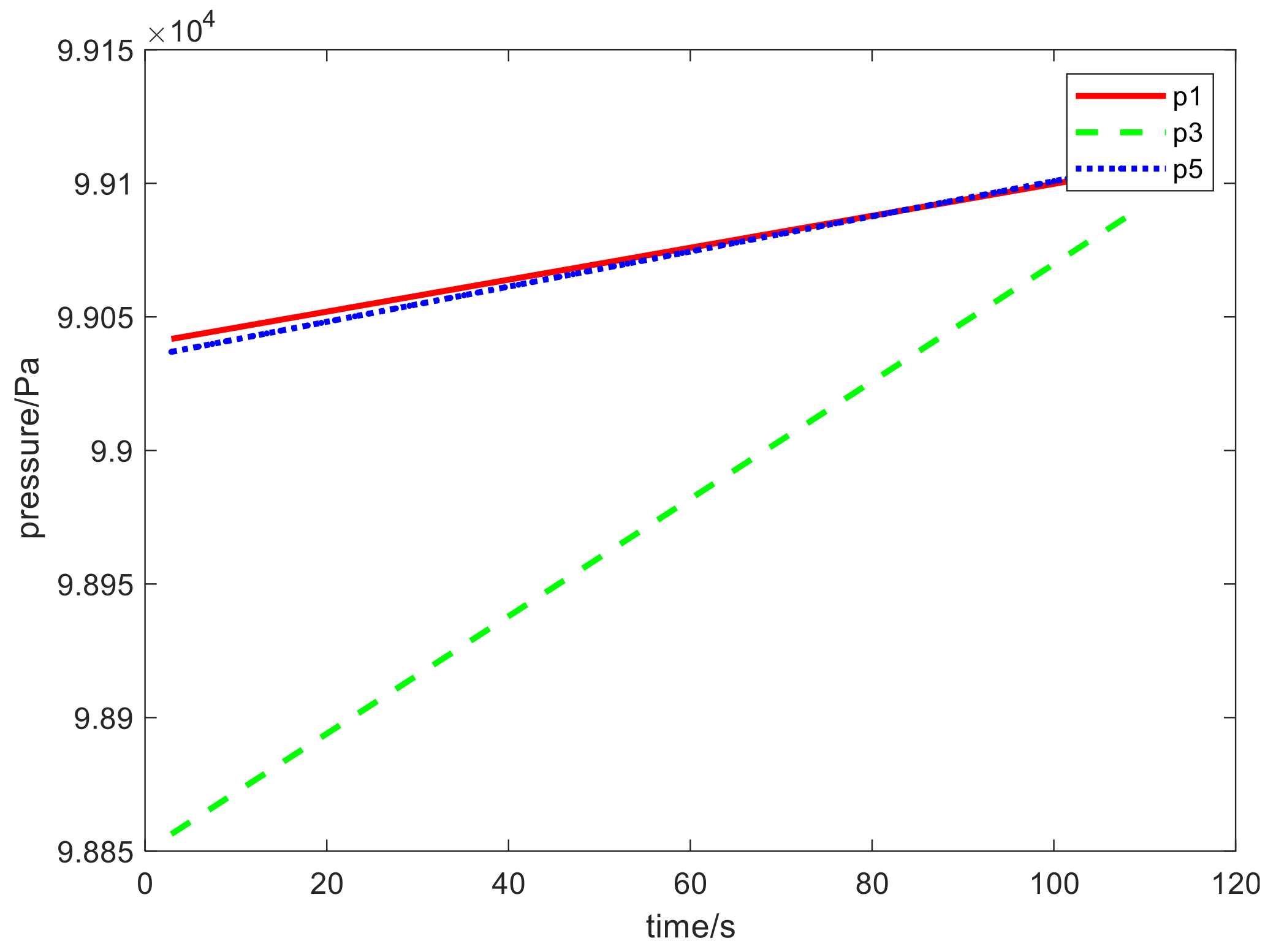
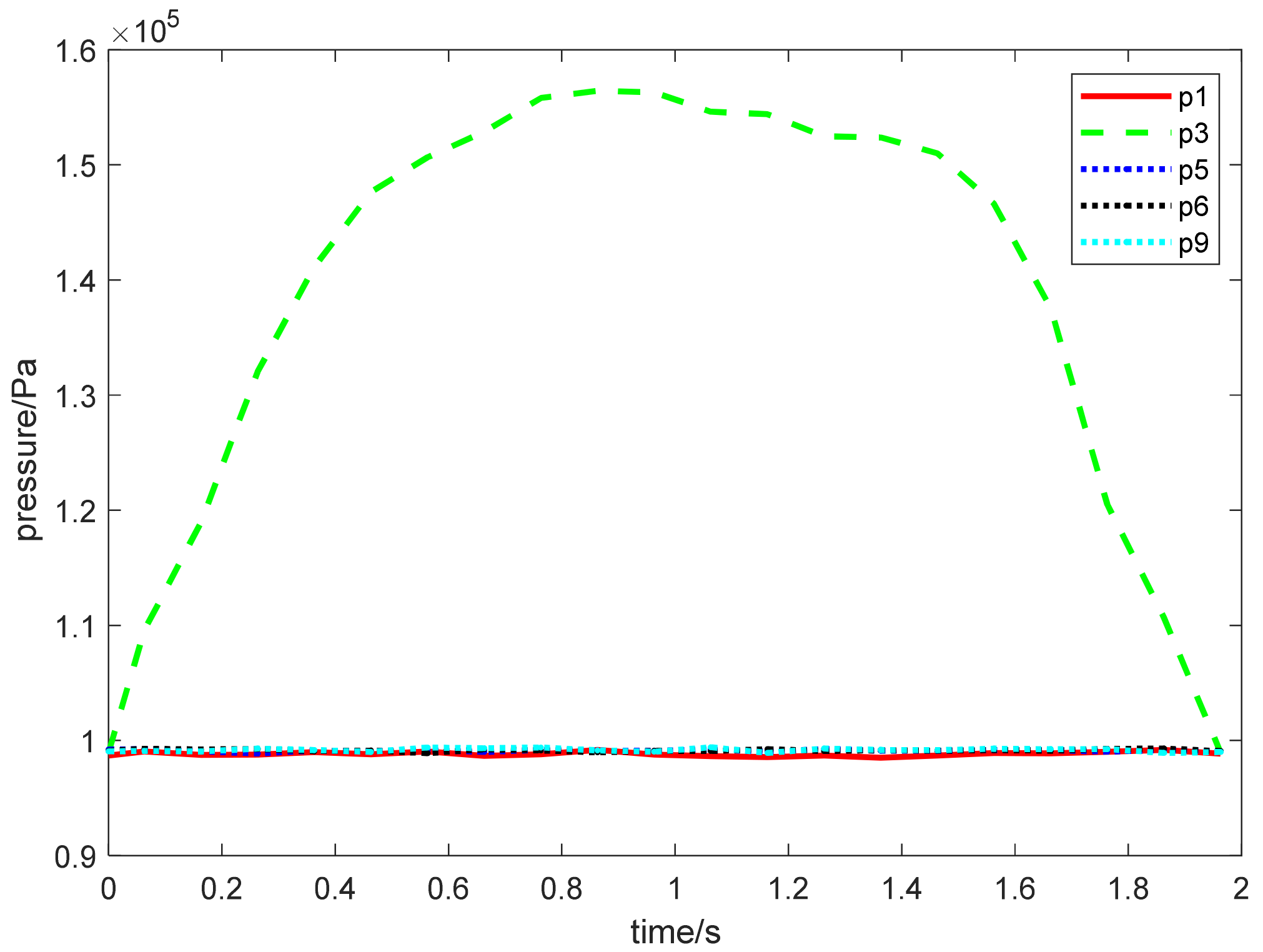
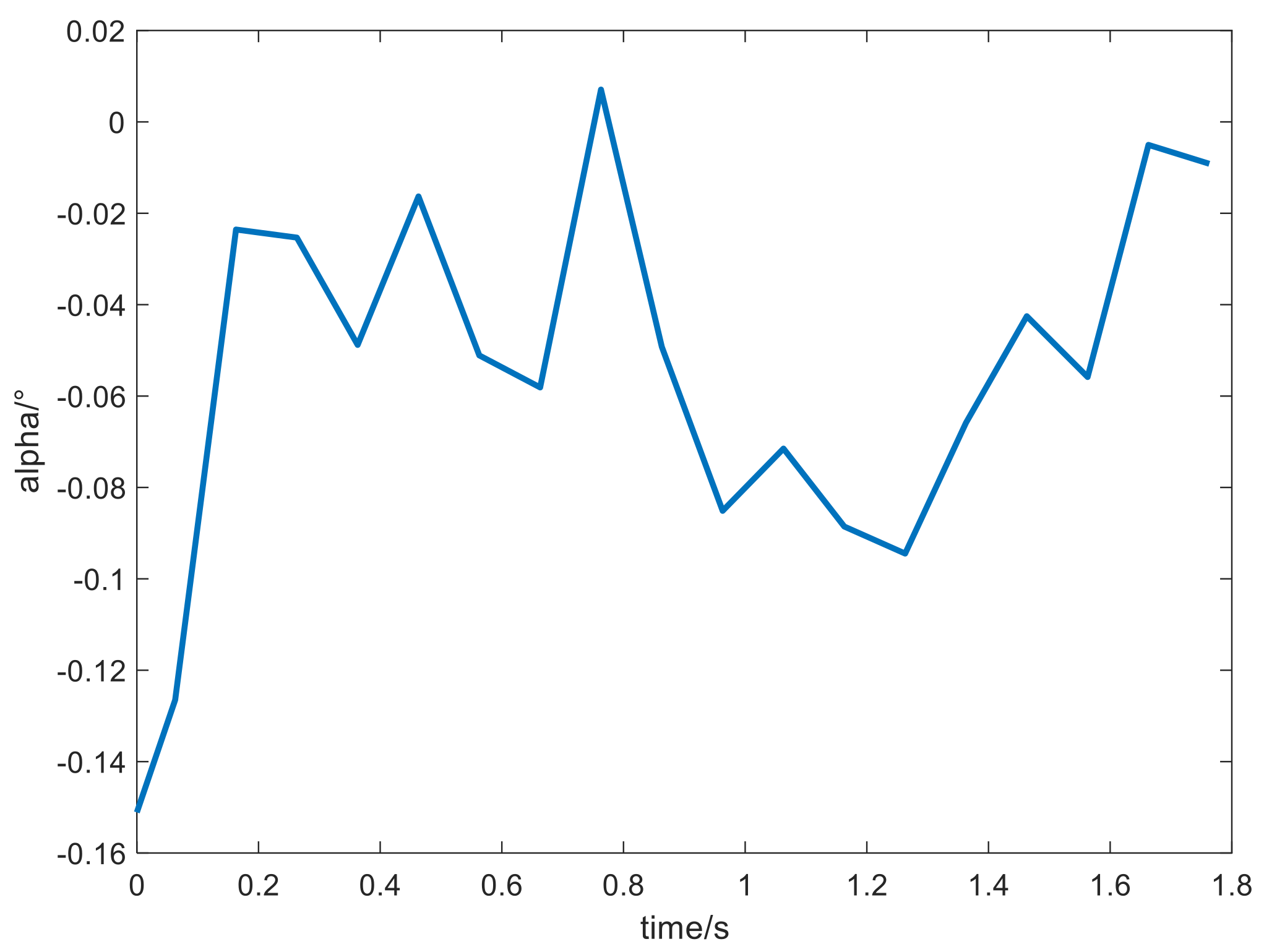
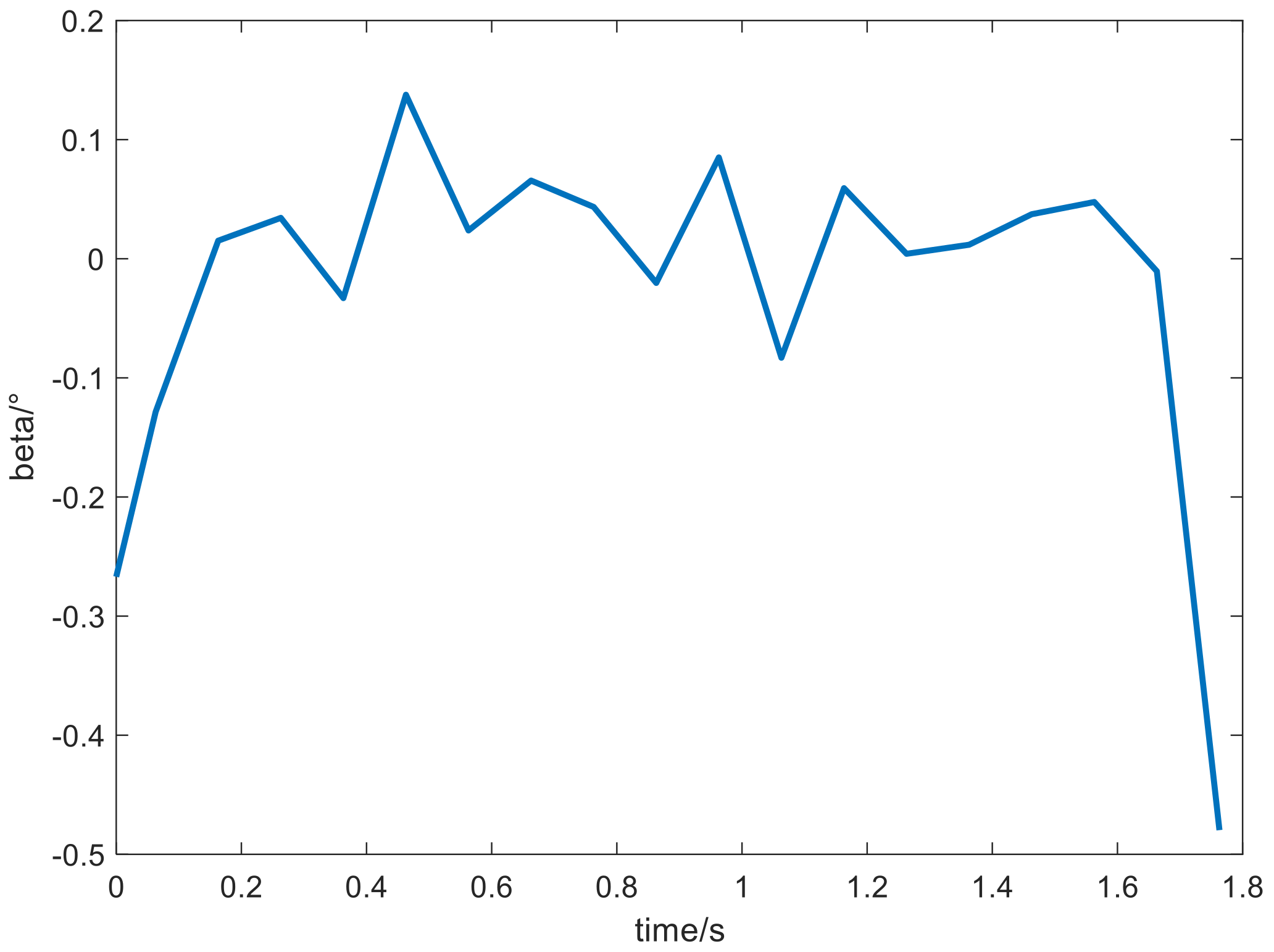
- Proposing an intuitive function between the angle of attack, angle of sideslip and measured pressure. The analysis shows that a zero bias of the angle of attack is related to the difference between p1 and p5, and a zero bias of the angle of sideslip is related to p6 and p9, so pressure sensors 1, 5 are symmetrically distributed, and pressure sensors 6, 9 are also symmetrically distributed to reduce the zero bias in the flush air data sensing module. In order to improve the calculation precision, it is necessary to eliminate the zero bias as much as possible with analysis, so this has high significance for improving the installation precision of pressure sensors 1, 5, 6, 9. We can select high precision pressure sensors to reduce noise fluctuations and try to ensure consistency of fitted lines at symmetrical positions with measured data. The calculation precision of the angle of attack and angle of sideslip can be improved by reducing the zero bias, and the precision of other parameters will improve in the meanwhile, then the overall performance will be improved.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khankalantary, S.; Sheikholeslam, F. Robust extended state observer-based three dimensional integrated guidance and control design for interceptors with impact angle and input saturation constraints. ISA Trans. 2020, 104, 299–309. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.X.; Gong, Z.F.; Cai, G.B. Reentry tracking control of hypersonic vehicle with complicated constraints. J. Ordnance Equip. Eng. 2019, 40, 1–6. [Google Scholar]
- Lyu, T.; Guo, Y.; Li, C.; Ma, G.; Zhang, H. Multiple missiles cooperative guidance with simultaneous attack requirement under directed topologies. Aerosp. Sci. Technol. 2019, 89, 100–110. [Google Scholar] [CrossRef]
- Tang, Y.; Zhu, X.; Zhou, Z.; Yan, F. Two-phase guidance law for impact time control under physical constraints. Chin. J. Aeronaut. 2020, 33, 126–138. [Google Scholar] [CrossRef]
- Palmer, C. The boeing 737 max saga: Automating failure. Engineering 2020, 6, 2–3. [Google Scholar] [CrossRef]
- Alvarez-Montoya, J.; Carvajal-Castrillón, A.; Sierra-Pérez, J. In-flight and wireless damage detection in a UAV composite wing using fiber optic sensors and strain field pattern recognition. Mech. Syst. Signal Process. 2020, 136, 106526. [Google Scholar] [CrossRef]
- Li, G.; Lee, H.; Rai, A.; Chattopadhyay, A. Analysis of operational and mechanical anomalies in scheduled commercial flights using a loga-rithmic multivariate Gaussian model. Transp. Res. C Emerg. Technol. 2020, 110, 20–39. [Google Scholar] [CrossRef]
- Jia, Q.; Hu, J.; He, Q.; Zhang, W. An Algorithm to Improve Accuracy of Flush Air Data Sensing. IEEE Sens. J. 2021, 21, 14987–14996. [Google Scholar] [CrossRef]
- Sankaralingam, L.; Ramprasadh, C. A comprehensive survey on the methods of attack angle measurement and estimation in UAVs. Chin. J. Aeronaut. 2020, 33, 749–770. [Google Scholar] [CrossRef]
- Marina, G.D.; Marcos; Haya. Attack angle and true airspeed failure sensor detection and recovery based on unscented Kalman filters for the alpha vehicle. In Proceedings of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; pp. 1197–1202. [Google Scholar]
- Zeng, J.; Dou, L.; Xin, B. A joint mid-course and terminal course cooperative guidance law for multi-missile salvo attack. Chin. J. Aeronaut. 2018, 31, 1311–1326. [Google Scholar] [CrossRef]
- Zhao, Q.; Dong, X.; Song, X.; Ren, Z. Cooperative time-varying formation guidance for leader-following missiles to intercept a maneuvering target with switching topologies. Nonlinear Dyn. 2019, 95, 129–141. [Google Scholar] [CrossRef]
- Hua, Y.; Dong, X.; Li, Q.; Ren, Z. Distributed time-varying formation robust tracking for general linear multiagent systems with parameter uncertainties and external disturbances. IEEE Trans. Cybern. 2017, 47, 1959–1969. [Google Scholar] [CrossRef] [PubMed]
- Calia, A.; Denti, E.; Galatolo, R.; Schettini, F. Air data computa-tion using neural networks. J. Aircr. 2008, 45, 2078–2083. [Google Scholar] [CrossRef]
- Beck, R.; Karlgaard, C.; O’Keefe, S.; Siemers, P.; White, B.; Engelund, W.; Munk, M. Mars entry atmospheric data system modeling and algorithm development. In Proceedings of the AIAA Thermophysics Conference, San Antonio, TX, USA, 22–25 June 2009; pp. 1–21. [Google Scholar]
- Wang, P. Rbf neural network modeling and validation for fads system applied to the vehicle with sharp wedged fore-bodies. Phys. Gases. 2019, 4, 23–33. [Google Scholar]
- Liu, Y.; Xiao, D.B. Trade-off design of measurement tap configuration and solving model for a flush air data sensing system. Measurement 2016, 90, 278–285. [Google Scholar] [CrossRef]
- Chen, G.; Chen, B.; Li, P.; Bai, P.; Ji, C. Study on algorithms of flush air data sensing system for Hypersonic Vehicle. Procedia Eng. 2015, 99, 860–865. [Google Scholar] [CrossRef][Green Version]
- Baumann, E.; Pahle, J.W.; Davis, M.C.; White, J.T. X-43A flush airdata sensing system flight-test results. J. Spacecr. Rocket. 2013, 47, 48–61. [Google Scholar] [CrossRef]
- Zhao, L. Research on Integrated Online Identification and Prediction Method of Missile Aerodynamic/Atmospheric Parameters. M.D. Thesis, National University of Defense Technology, Changsha, China, 2018; pp. 47–50. [Google Scholar]
- Li, Q.C.; Liu, J.F.; Liu, X.; Yang, Y.C.; Chen, J.C.; Tian, P.Z.; Yang, J.; Kang, H.B.; Zhu, S.M. The primary study of 3-point calculation method for the flush air data system. Acta Aerodyn. Sin. 2014, 32, 360–363. [Google Scholar] [CrossRef]
- Huang, Z.X. Research on Environmental Parameters Online Identification and Adaptive Control Method of Missile. M.D. Thesis, National University of Defense Technology, Changsha, China, 2017; pp. 15–16. [Google Scholar]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Real Value | Calculated Value |
|---|---|---|
| Angle of attack | −13° | −13.714° |
| Angle of sideslip | 0° | −0.66076° |
| Dynamic pressure | 5025.01021 Pa | 6543.43605 Pa |
| Static pressure | 287.144 Pa | 206.807 Pa |
| Mach number | 5 | 5.00263 |
| Atmospheric density | 0.00399568 kg/m3 | 0.00520369 kg/m3 |
| Shape coefficient | 0.01140587 | 0.03528756 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Jiang, Z.; Bai, X.; Zhang, S.; Liu, L. Design and Verification of Flush Air Data Sensing Module with Navigation and Temperature Information. Aerospace 2021, 8, 336. https://doi.org/10.3390/aerospace8110336
Fan X, Jiang Z, Bai X, Zhang S, Liu L. Design and Verification of Flush Air Data Sensing Module with Navigation and Temperature Information. Aerospace. 2021; 8(11):336. https://doi.org/10.3390/aerospace8110336
Chicago/Turabian StyleFan, Xiaoshuai, Zhenyu Jiang, Xibin Bai, Shifeng Zhang, and Longbin Liu. 2021. "Design and Verification of Flush Air Data Sensing Module with Navigation and Temperature Information" Aerospace 8, no. 11: 336. https://doi.org/10.3390/aerospace8110336
APA StyleFan, X., Jiang, Z., Bai, X., Zhang, S., & Liu, L. (2021). Design and Verification of Flush Air Data Sensing Module with Navigation and Temperature Information. Aerospace, 8(11), 336. https://doi.org/10.3390/aerospace8110336