
Short-Arc Association and Orbit Determination for New GEO Objects with Space-Based Optical Surveillance

 , , ,
, , ,
Abstract
:1. Introduction
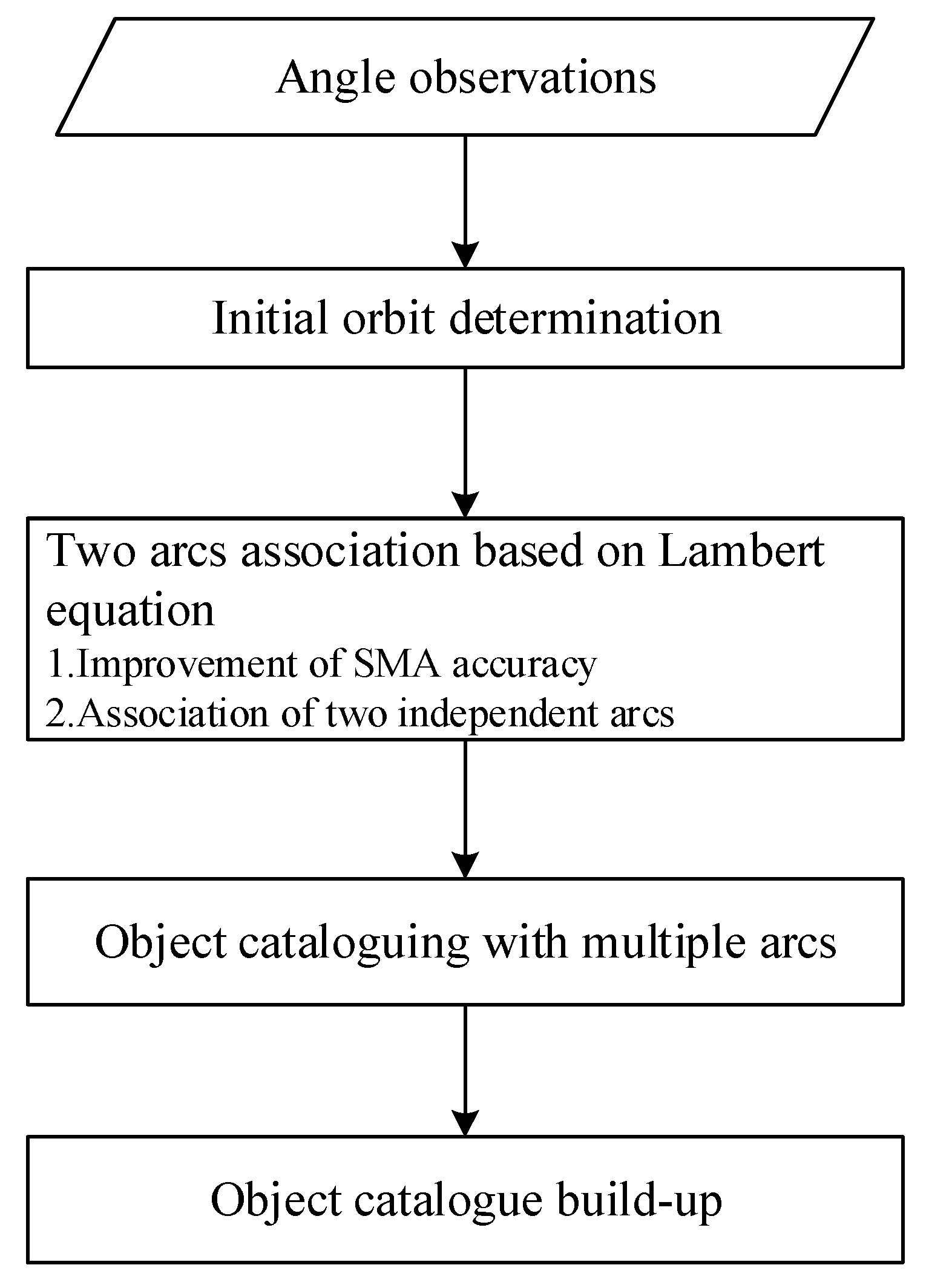
2. Computation Scheme
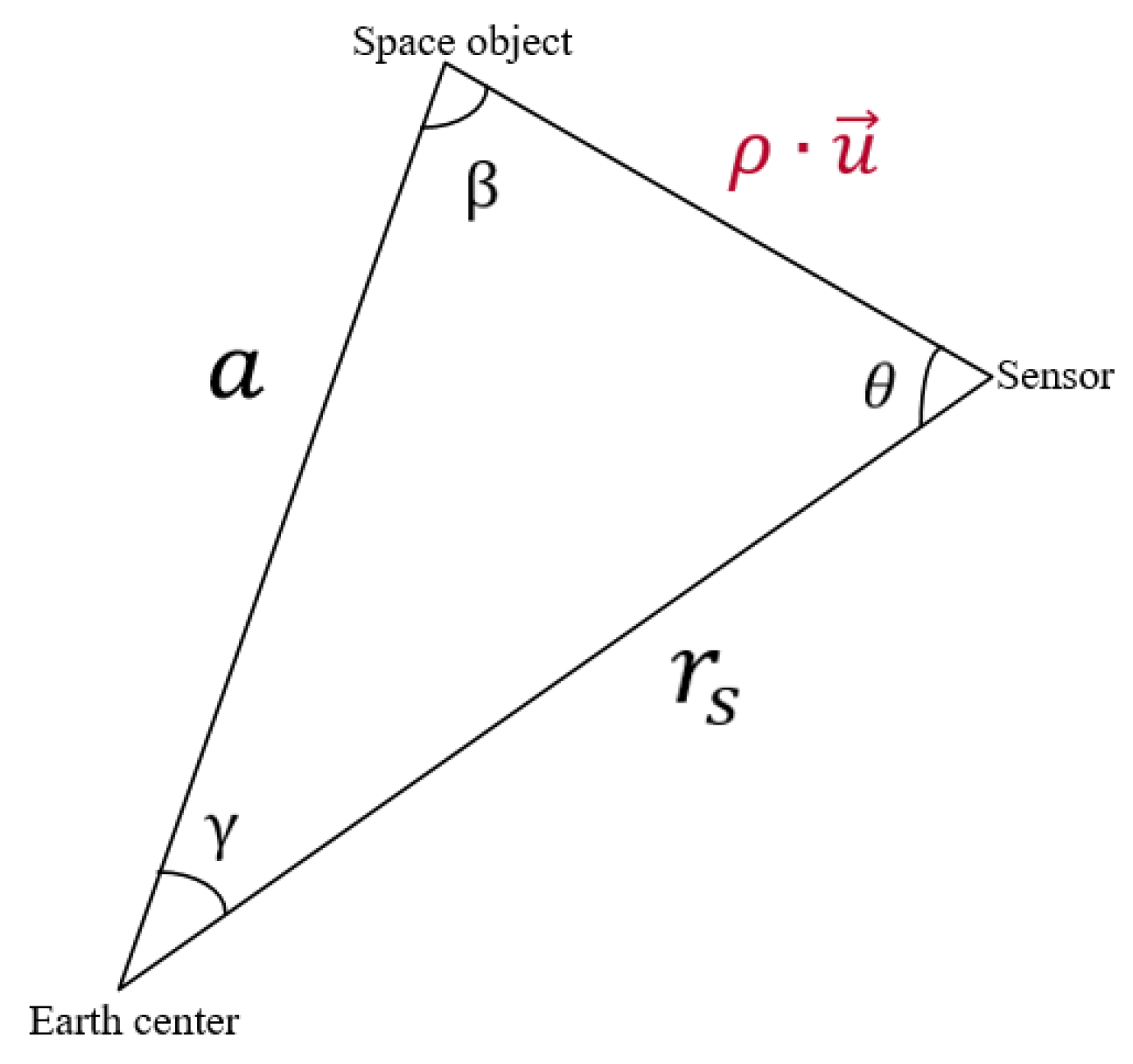
2.1. A Multipoint Optimal Angles-Only IOD Method for Near-Circular GEO Orbit
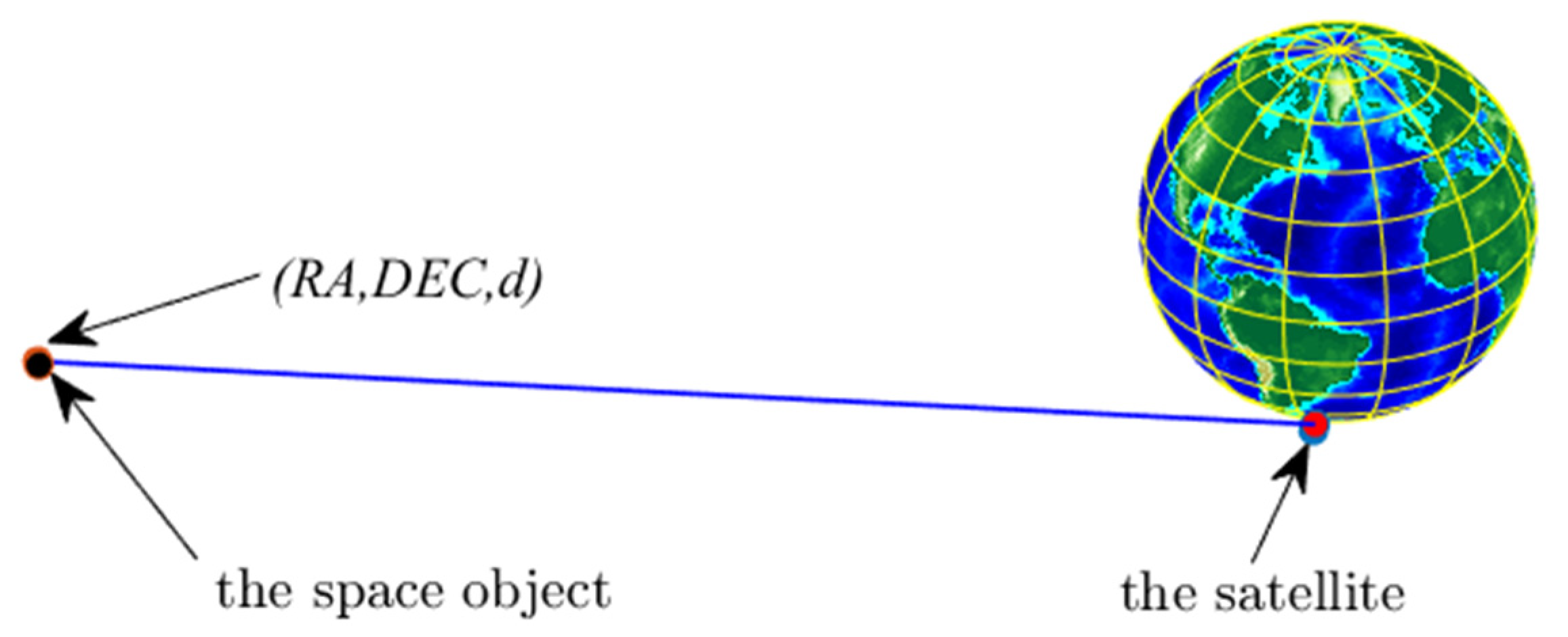
2.1.1. IOD with Angular Observations at Two Arbitrary Epochs
- (1)
- Assume the SMA is in the range , and divide this range into N sub-ranges each having a length . The sub-range is then . For an object in the GEO orbit region, , , and may be set to 40,000 km, 44,000 km, and 50 km, respectively.
- (2)
- For each sub-range, compute the objective function values at its lower and upper boundary SMAs, and , respectively, which results in and .
- (3)
- If the two function values have the same sign, then the true SMA is not in this sub-range; return to Step 2 to assess the next sub-range;
- (4)
- Otherwise, if the two function values have the opposite sign, this sub-range is divided into two segments of equal length; then, return to Step 2 to assess the new sub-ranges.
- (5)
- Step 4 is terminated when the function values at the lower and upper boundaries of a SMA sub-range are close to each other within the preset threshold, and the mean of the two boundary values of the sub-range is an estimate of the SMA of the object orbit.
2.1.2. Quality Assessment of IOD Orbit Elements Using Observation Sequence
2.1.3. Determination of an Optimal Orbit Element Set
2.2. Association of Two Arcs Based on Lambert Equation
2.2.1. Improvement of SMA Accuracy by Application of the Lambert Equation to Two Arcs
2.2.2. Association of Two Independent Arcs
2.3. Object Cataloguing with Multiple Arcs
2.4. Algorithm Implementation
- Apply the IOD method in Section 2.1 to each single arc to obtain a set of IOD elements for the arc.
- Given two arcs, denoted as Arc1 and Arc2, if the two arcs are apart by less than a preset time interval threshold (e.g., 3 days), and the difference in the SMAs of the two arcs and the angle between the two normal vectors of the two IOD orbit planes are less than the preset thresholds, the two arcs will be further assessed for their correlation using Steps 3 and 4.
- Apply the Lambert problem method in Section 2.2.1 to the two arcs to determine a set of orbit elements, denoted as .
- Apply the method in Section 2.2.2 to determine a new set of orbit elements from the use of all data of the two arcs, in which are used as the initial values in the least-squares orbit determination. If the quality test in Equation (14) passes, Arc1 and Arc2 are very likely from the same object; their association is declared, and the resulting orbit elements are denoted .
- For another arc, denoted as Arc3, if it is associated to either Arc1 or Arc2, the three arcs are processed using the method in Section 2.3. If it is successful, they can be declared to be from the same object, and the determined orbit elements are more accurate than .
- Repeat Step 5 to process a fourth, fifth, …, arc. When a new arc is included in the orbit determination, and the quality test passes, the new arc is successfully associated, and accurate orbit elements are determined from the use of data of all arcs.
3. Results
3.1. Angle Data and Threshold Settings
3.2. IOD Experiments
3.3. Two-Arc Association
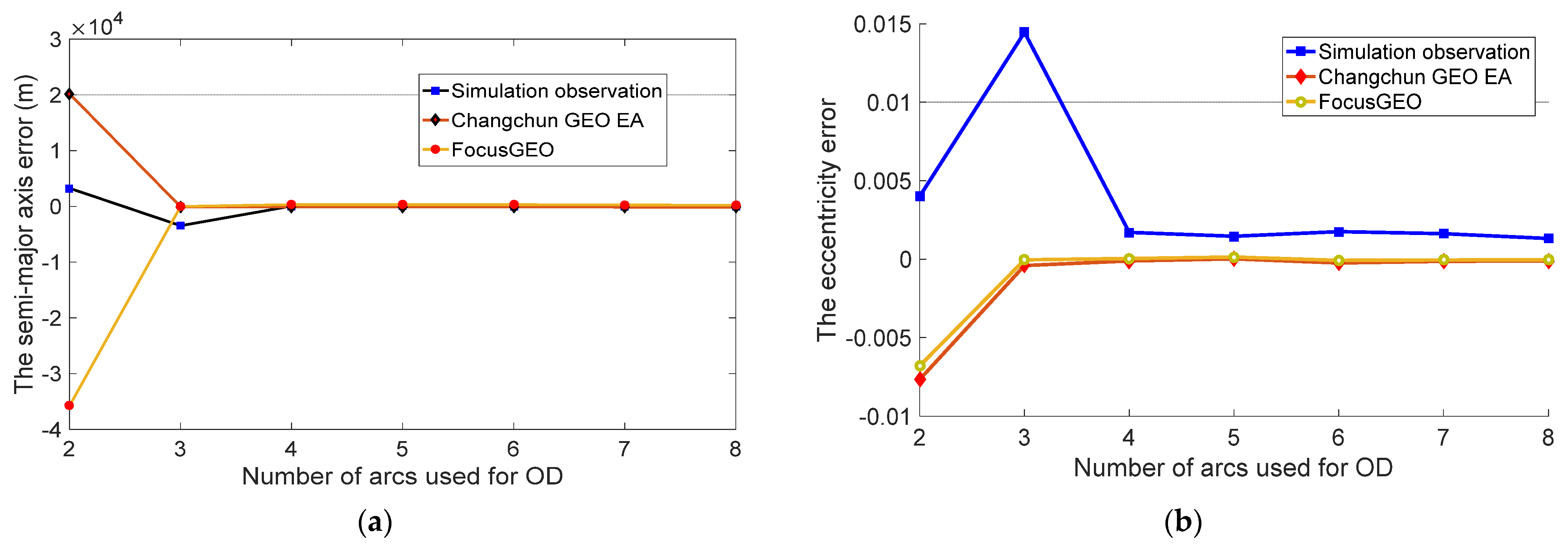
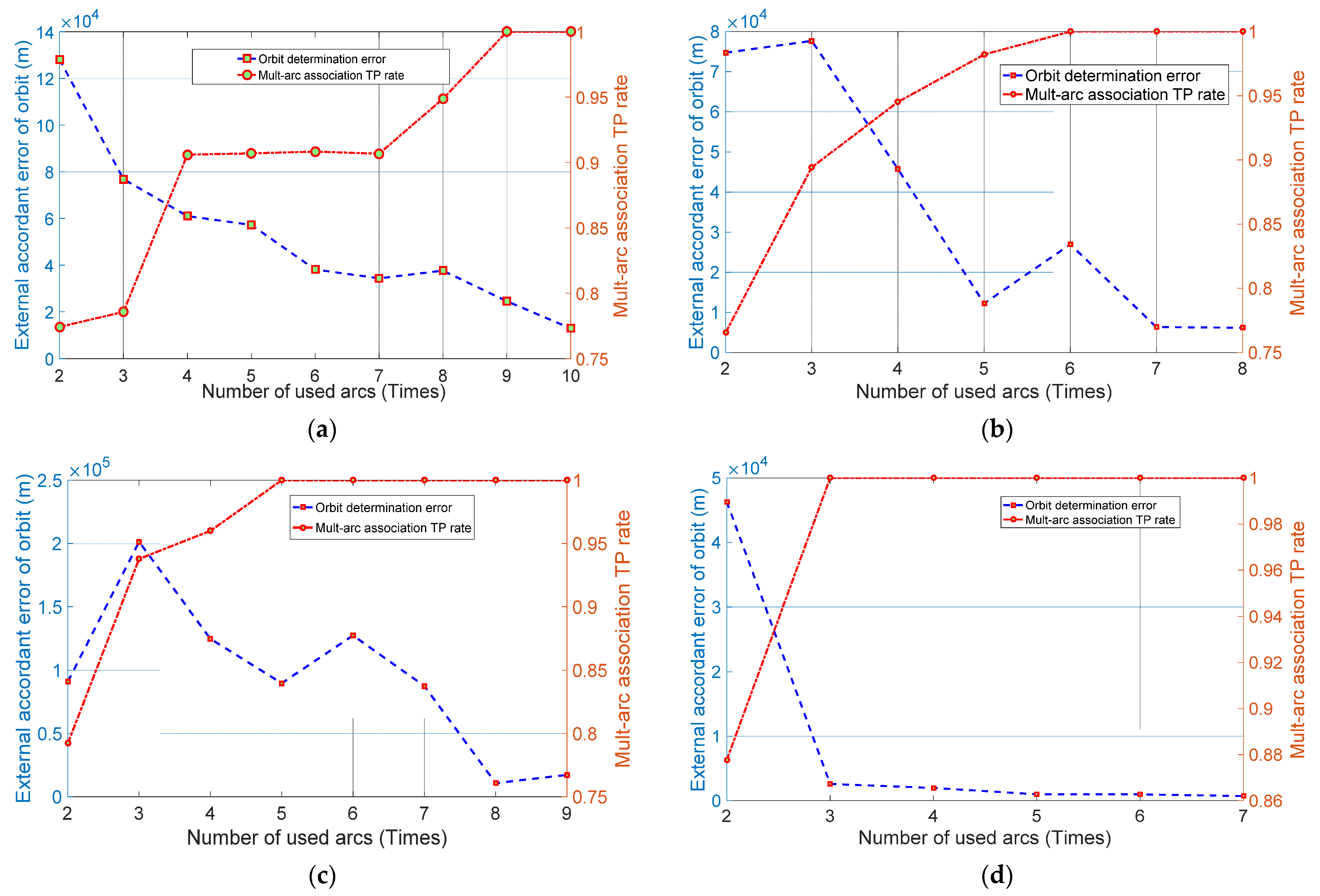
3.4. Object Cataloguing
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Agapov, V.M. Space objects data catalogue. Eur. Space Agency Publ. ESA SP 2001, 473, 759–764. [Google Scholar]
- Henize, K.G.; Stanley, J.F.; O’Neill, C.A.; Barbara, S.N. Detection of orbital debris with GEODSS telescopes//Space Debris Detection and Mitigation. Int. Soc. Opt. Photonics 1993, 1951, 76–84. [Google Scholar]
- Nakajima, A.; Kurosaki, H.; Fukaya, T. Space Debris Optical Observation System in JAXA/IAT. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Wailea, Maui, Hawaii, 10–14 September 2006; p. E67. [Google Scholar]
- Herzog, J.; Schildknecht, T.; Hinze, A.; Ploner, M.; Vananti, A. Space surveillance observations at the AIUB Zimmerwald observatory. In Proceedings of the 6th European Conference on Space Debris, Darmstadt, Germany, 22–25 April 2013. [Google Scholar]
- Chun, F.K.; Tippets, R.D.; Strong, D.M.; Della-Rose, D.J.; Polsgrove, D.E.; Gresham, K.C.; Reid, J.A.; Christy, C.P.; Korbitz, M.; Gray, J.; et al. A new global array of optical telescopes: The falcon telescope network. Publ. Astron. Soc. Pac. 2018, 130, 095003. [Google Scholar] [CrossRef]
- Shin, B.; Lee, E.; Park, S.Y. Determination of Geostationary Orbits (GEO) Satellite Orbits Using Optical Wide-Field Patrol Network (OWL-Net) Data. J. Astron. Space Sci. 2019, 36, 169–180. [Google Scholar]
- Luo, H.; Mao, Y.D.; Yu, Y.; Tang, Z.H. FocusGEO observations of space debris at Geosynchronous Earth Orbit. Adv. Space Res. 2019, 64, 465–474. [Google Scholar] [CrossRef]
- Hossein, S.H.; Acernese, M.; Cardona, T.; Cialone, G.; Curiano, F.; Mariani, L.; Marini, V.; Marzioli, P.; Parisi, L.; Piergentili, F.; et al. Sapienza Space debris Observatory Network (SSON): A high coverage infrastructure for space debris monitoring. J. Space Saf. Eng. 2020, 7, 30–37. [Google Scholar] [CrossRef]
- Piergentili, F.; Zarcone, G.; Parisi, L.; Mariani, L.; Hossein, S.H.; Santoni, F. LEO Object’s Light-Curve Acquisition System and Their Inversion for Attitude Reconstruction. Aerospace 2021, 8, 4. [Google Scholar] [CrossRef]
- Šilha, J.; Krajčovič, S.; Zigo, M.; Tóth, J.; Žilková, D.; Zigo, P.; Kornoš, L.; Šimon, J.; Schildknecht, T.; Flohrer, T.; et al. Space debris observations with the Slovak AGO70 telescope: Astrometry and light curves. Adv. Space Res. 2020, 65, 2018–2035. [Google Scholar] [CrossRef]
- Guo, X.; Gao, P.; Shen, M.; Yang, D.; Yu, H.; Liu, T.; Li, J.; Zhao, Y. Introduction to APOSOS project: 15 cm aperture electro-optical telescopes to track space objects. Adv. Space Res. 2020, 65, 1990–2002. [Google Scholar] [CrossRef]
- Fujimoto, K.; Scheeres, D.J.; Alfriend, K.T. Analytical nonlinear propagation of uncertainty in the two-body problem. J. Guid. Control Dyn. 2012, 35, 497–509. [Google Scholar] [CrossRef]
- Wang, X.-H.; Li, J.-F.; Wang, Y.-R. Orbit determination and precision analysis of space object with space-based camera. Opt. Precis. Eng. 2013, 21, 1394–1403. [Google Scholar] [CrossRef]
- Tommei, G.; Milani, A.; Rossi, A. Orbit determination of space debris: Admissible regions. Celest. Mech. Dyn. Astron. 2007, 97, 289–304. [Google Scholar] [CrossRef] [Green Version]
- Escobal, P.R. Methods of Orbit Determination; Krieger Publishing Company: Malabar, FL, USA, 1965. [Google Scholar]
- Gooding, R.H. A new procedure for the solution of the classical problem of minimal orbit determination from three lines of sight. Celest. Mech. Dyn. Astron. 1996, 66, 387–423. [Google Scholar] [CrossRef]
- Stauch, J.; Bessell, T.; Rutten, M.; Baldwin, J.; Jah, M.; Hill, K. Joint Probabilistic Data Association and Smoothing Applied to Multiple Space Object Tracking. J. Guid. Control Dyn. 2018, 41, 19–33. [Google Scholar] [CrossRef]
- DeMars, K.J.; Jah, M.K. Probabilistic initial orbit determination using Gaussian mixture models. J. Guid. Control Dyn. 2013, 36, 1324–1335. [Google Scholar] [CrossRef]
- Gim, D.W.; Alfriend, K.T. State transition matrix of relative motion for the perturbed noncircular reference orbit. J. Guid. Control Dyn. 2003, 26, 956–971. [Google Scholar] [CrossRef]
- DeMars, K.J.; Jah, M.K.; Schumacher, P.W. The use of short-arc angle and angle rate data for deep-space initial orbit determination and track association. In Proceedings of the Eighth US/Russian Space Surveillance Workshop, Wailea, HI, USA, 10 February 2009. [Google Scholar]
- Choi, J.; Choi, Y.J.; Yim, H.S.; Jo, J.H.; Han, W.Y. Two-site optical observation and initial orbit determination for geostationary earth orbit satellites. J. Astron. Space Sci. 2010, 27, 337–343. [Google Scholar] [CrossRef] [Green Version]
- Weisman, R.M.; Majji, M.; Alfriend, K.T. Analytic characterization of measurement uncertainty and initial orbit determination on orbital element representations. Celest. Mech. Dyn. Astron. 2014, 118, 165–195. [Google Scholar] [CrossRef]
- Maruskin, J.M.; Scheeres, D.J.; Alfriend, K.T. Correlation of optical observations of objects in earth orbit. J. Guid. Control Dyn. 2009, 32, 194–209. [Google Scholar] [CrossRef]
- Sciré, G.; Santoni, F.; Piergentili, F. Analysis of orbit determination for space based optical space surveillance system. Adv. Space Res. 2015, 56, 421–428. [Google Scholar] [CrossRef]
- Tao, X.; Li, Z.; Gong, Q.; Zhang, Y.; Jiang, P. Uncertainty Analysis of the Short-Arc Initial Orbit Determination. IEEE Access 2020, 8, 38045–38059. [Google Scholar] [CrossRef]
- Porfilio, M.; Piergentili, F.; Graziani, F. Two-site orbit determination: The 2003 GEO observation campaign from Collepardo and Mallorca. Adv. Space Res. 2006, 38, 2084–2092. [Google Scholar] [CrossRef]
- Sang, J.; Lei, X.; Zhang, P.; Pan, T.; Li, H. Orbital solutions to LEO-to-LEO angles-only very short-arc tracks. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017. [Google Scholar]
- Stoker, K.; Johnson, J.; Abercromby, K.; Liam, S.; Morgan, Y.; Andrew, Z. Angles-Only Orbit Determination Accuracies with Limited Observational Arc. Advanced Maui Optical and Space Surveillance Technologies Conference. 2020. Available online: https://amostech.com/TechnicalPapers/2020/Poster/Stoker.pdf (accessed on 12 October 2021).
- Ansalone, L.; Curti, F. A genetic algorithm for initial orbit determination from a too short arc optical observation. Adv. Space Res. 2013, 52, 477–489. [Google Scholar] [CrossRef]
- Hill, K.; Alfriend, K.T.; Sabol, C. Covariance-based uncorrelated track association. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Lei, X.; Wang, K.; Sang, J.; Zhang, P.; Pan, T.; Li, H. A geometrical approach to association of space-based very short-arc LEO tracks. Adv. Space Res. 2018, 62, 542–553. [Google Scholar] [CrossRef]
- Fujimoto, K.; Alfriend, K.T. Optical Short-Arc Association Hypothesis Gating via Angle-Rate Information. J. Guid. Control Dyn. 2015, 38, 1602–1613. [Google Scholar] [CrossRef]
- Wu, L. Orbit and Detection of Satellites and Space Debris; Chinese Science and Technology Press: Beijing, China, 2011. (In Chinese) [Google Scholar]
- Fadrique, F.M.; Maté, A.; Grau, J.J.; Sanchez, J.F.; Garcia, L.A. Comparison of angles only initial orbit determination algorithms for space debris cataloguing. J. Aerosp. Eng. 2012, 4, 39. [Google Scholar] [CrossRef]
- Liu, L.; Tang, J. Theory and Applications of Satellite Orbit; Publishing House of Electronics Industry: Beijing, China, 2015. (In Chinese) [Google Scholar]
- Wu, L.; Xiong, J.; Niu, Z.; Xiao, W. Space-Based Detection of Space Target; China Science Publishing: Beijing, China, 2017. (In Chinese) [Google Scholar]
- Vallado, D.A.; Mcclain, W.D. Fundamentals of Astrodynamics and Applications; Springer Science: Berlin, Germany, 2013. [Google Scholar]
- Fujimoto, K.; Scheeres, D.J. Correlation of Optical Observations of Earth-Orbiting Objects and Initial Orbit Determination. J. Guid. Control Dyn. 2012, 5, 208–221. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, K.; Scheeres, D.J.; Herzog, J.; Schildknecht, T. Association of optical tracklets from a geosynchronous belt survey via the direct Bayesian admissible region approach. Adv. Space Res. 2014, 53, 295–308. [Google Scholar] [CrossRef] [Green Version]
- Cordelli, E.; Vananti, A.; Schildknecht, T. Covariance study to evaluate the influence of optical follow-up strategies on estimated orbital parameters. Acta Astronaut. 2016, 122, 76–89. [Google Scholar] [CrossRef] [Green Version]
- Hussein, I.I.; Roscoe, C.W.; Mercurio, M.; Wilkins, M.P.; Schumacher, P.W. Probabilistic Admissible Region for Multihypothesis Filter Initialization. J. Guid. Control Dyn. 2018, 41, 710–724. [Google Scholar] [CrossRef]
- Huang, J.; Hu, W.; Xin, Q.; Guo, W. A novel data association scheme for LEO space debris surveillance based on a double fence radar system. Adv. Space Res. 2012, 50, 1451–1461. [Google Scholar] [CrossRef]
- Milani, A.; Gronchi, G.F.; Vitturi, M.M.; Knežević, Z. Orbit determination with very short arcs. I admissible regions. Celest. Mech. Dyn. Astron. 2004, 90, 57–85. [Google Scholar] [CrossRef]
- Liu, L. Orbital Mechanics of Artificial Earth Satellite; Higher Education Publishing: Beijing, China, 1992. (In Chinese) [Google Scholar]
- Armellin, R.; Di Lizia, P.; Zanetti, R. Dealing with uncertainties in angles-only initial orbit determination. Celest. Mech. Dyn. Astron. 2016, 125, 435–450. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Li, Z.; Cai, H.; Zhang, H. Single-/Multiple-Revolution Lambert’s Problem Constraints for Optical Track-to-Track Association. AAS 21-671. 2021. Available online: https://www.researchgate.net/profile/Yang_Yang345/publication/353826657_Preprint_AAS_21-671_SINGLE-MULTIPLE-REVOLUTION_LAMBERT’S_PROBLEM_CONSTRAINTS_FOR_OPTICAL_TRACK-TO-TRACK_ASSOCIATION/links/6113ca451ca20f6f86152cc6/Preprint-AAS-21-671-SINGLE-MULTIPLE-REVOLUTION-LAMBERTS-PROBLEM-CONSTRAINTS-FOR-OPTICAL-TRACK-TO-TRACK-ASSOCIATION.pdf (accessed on 12 October 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | SMA Errors | Success Rate | |||
|---|---|---|---|---|---|
| ≤20 km | ≤50 km | ≤100 km | ≤200 km | ||
| i-Laplace method [33] | 12.38% | 26.97% | 43.44% | 61.14% | 85.98% |
| RS method [27] | 38.36% | 64.60% | 75.73% | 79.75% | 86.26% |
| Proposed method | 41.24% | 72.15% | 86.25% | 93.11% | 98.25% |
| Sensor | SMA Errors | Success Rate | |||
|---|---|---|---|---|---|
| ≤20 km | ≤50 km | ≤100 km | ≤200 km | ||
| Changchun GEO EA | 34.64% | 74.93% | 90.23% | 98.79% | 99.66% |
| SAO FocusGEO | 15.27% | 34.78% | 59.75% | 85.99% | 98.08% |
| Changchun LEO EA | 48.39% | 87.40% | 96.45% | 100.00% | 95.81% |
| Two Arcs of | Separation Time (h) | SMA Difference (km) |
|---|---|---|
| The same object | (0, 12) | 1.27 |
| (12, 24) | −1.40 | |
| (36, 48) | 1.35 | |
| Different objects | (0, 12) | −2529.70 |
| (12, 24) | −2793.73 | |
| (36, 48) | −2282.68 |
| SMA Difference (km) | ||||
|---|---|---|---|---|
| Two Arcs of | Separation Time (h) | Changchun GEO EA | SAO FocusGEO | Changchun LEO EA |
| The same object | (0, 12) | 18.70 | 32.86 | 2.98 |
| (12, 24) | 0.86 | 4.03 | 4.20 | |
| (36, 48) | 1.44 | −1.35 | 4.49 | |
| Different objects | (0, 12) | −1144.99 | −1974.79 | −27.51 |
| (12, 24) | 296.63 | −118.82 | −285.05 | |
| (36, 48) | −330.71 | −394.09 | −368.00 | |
| Method | Interval ≤ 0.5 d | 0.5 d < Interval ≤ 1.5 d |
|---|---|---|
| Method in Wang et al. [13] | 85.66% | 63.89% |
| Proposed method | 93.10% | 73.57% |
| Sensor | Interval ≤ 0.5 d | 0.5 d < Interval ≤ 1.5 d |
|---|---|---|
| Changchun GEO EA | 78.45% | 99.84% |
| SAO FocusGEO | 90.90% | 85.76% |
| Changchun LEO EA | 80.97% | 100.00% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Lei, X.; Zhao, G.; Liu, L.; Li, Z.; Luo, H.; Sang, J. Short-Arc Association and Orbit Determination for New GEO Objects with Space-Based Optical Surveillance. Aerospace 2021, 8, 298. https://doi.org/10.3390/aerospace8100298
Huang J, Lei X, Zhao G, Liu L, Li Z, Luo H, Sang J. Short-Arc Association and Orbit Determination for New GEO Objects with Space-Based Optical Surveillance. Aerospace. 2021; 8(10):298. https://doi.org/10.3390/aerospace8100298
Chicago/Turabian StyleHuang, Jian, Xiangxu Lei, Guangyu Zhao, Lei Liu, Zhenwei Li, Hao Luo, and Jizhang Sang. 2021. "Short-Arc Association and Orbit Determination for New GEO Objects with Space-Based Optical Surveillance" Aerospace 8, no. 10: 298. https://doi.org/10.3390/aerospace8100298
APA StyleHuang, J., Lei, X., Zhao, G., Liu, L., Li, Z., Luo, H., & Sang, J. (2021). Short-Arc Association and Orbit Determination for New GEO Objects with Space-Based Optical Surveillance. Aerospace, 8(10), 298. https://doi.org/10.3390/aerospace8100298