Electric Propulsion Methods for Small Satellites: A Review



Abstract
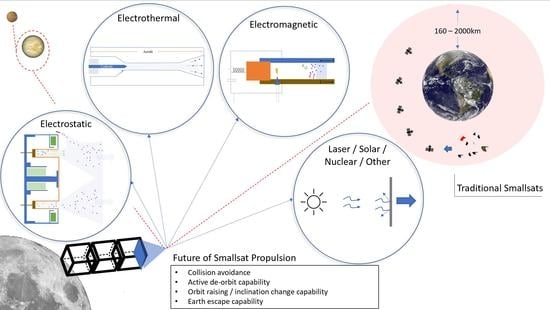
1. Introduction
2. Performance Characteristics
Range and Application
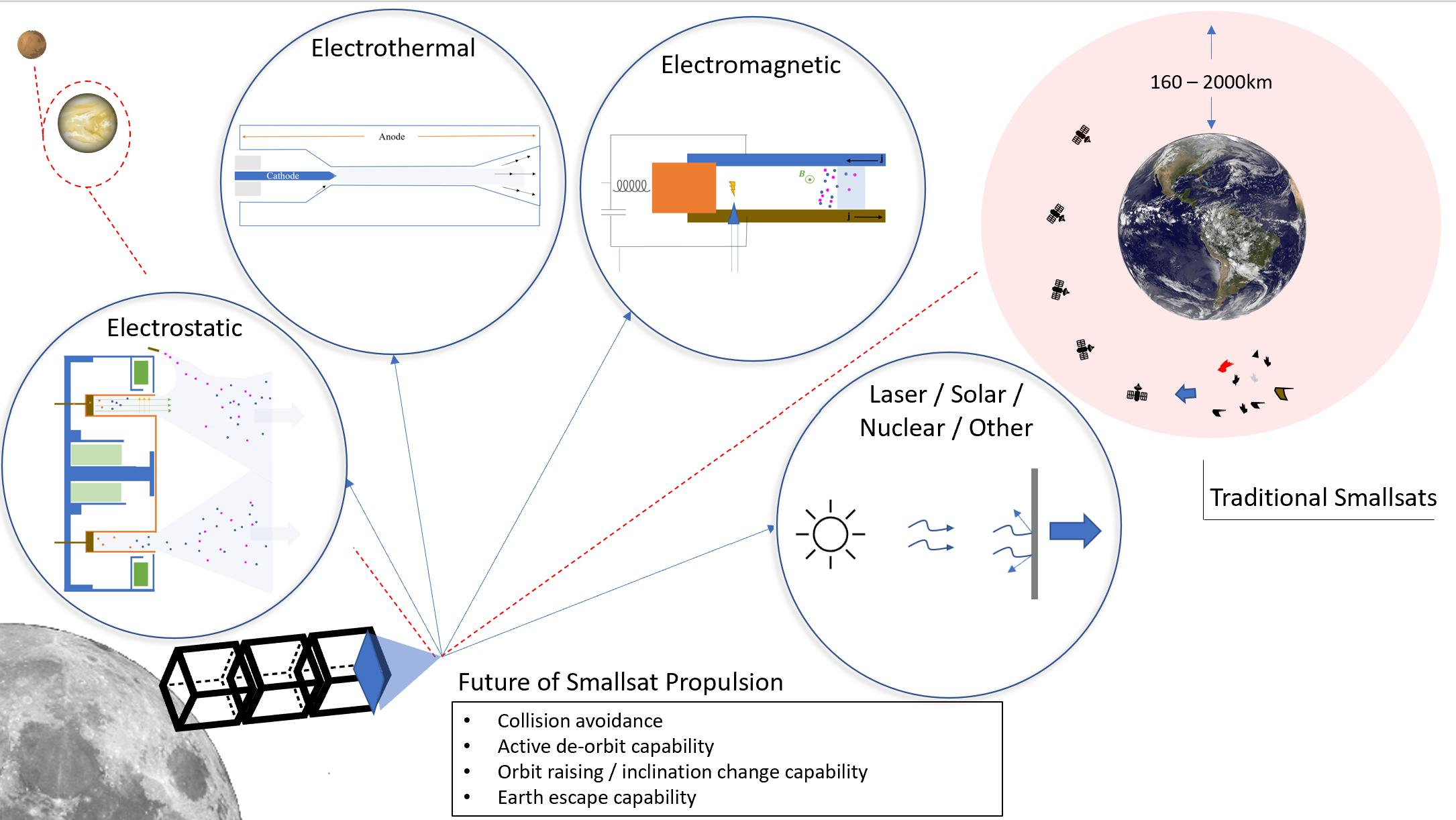
3. Electrostatic
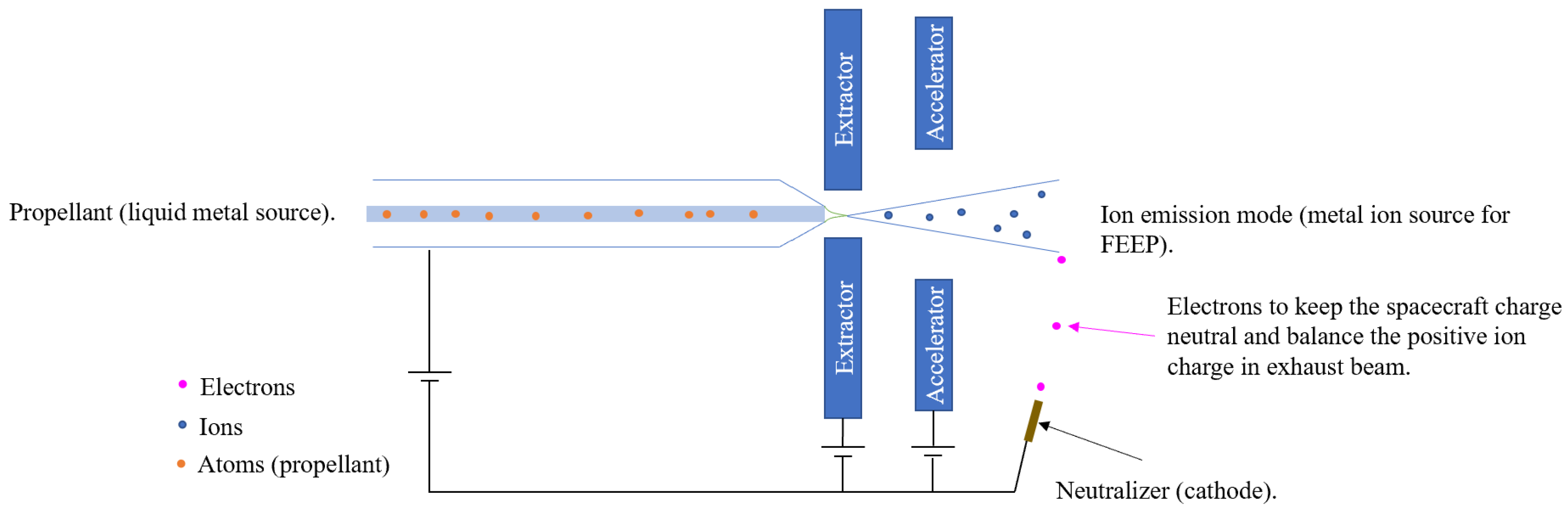
3.1. Electrospray Thrusters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Specific Impulse (s) | Thrust (N) | Power (W) | Propellant | Mission Demo | Manufacturer |
|---|---|---|---|---|---|---|---|
| Electrostatic Thrusters | |||||||
| ST7 | Colloid | >150 | 5–36 µ | ∼2 | Ionic liquid | LISA Pathfinder | Busek [30] |
| pet-100-mk2 | Colloid | >7500 | 220 µ | ∼14 | EMIM | Experimental | UoSH [31] |
| S-iEPS/ TILE | ILIS | 1150 | 0.1 m | <0.15 | EMI-BF4 | AeroCube 8 | MIT/Accion [27] |
| nanoFEEP | FEEP | 6000 | 8 µ | 50–150 m | Ga | UWE-4 | Dresden [7] |
| AIS ILIS1 | ILIS | 4500 | 3 µ | <0.1 | Molten Salts | Experimental | Applied Ion [32] Systems |
| PPS-1350 G | Hall thruster | 1660 | 90 m | 1500 | Xe, Kr, Ar | SMART - 1 | Safran [33] |
| PPSRX00 | Hall thruster | 1450 | 40 m | 650 | - | Experimental | Safran [34] |
| SPT-50M | Hall thruster | 1200 | 18 m | 300 | Xe | Canopus-V | Fakel [35] |
| HT100 | Hall thruster | 1300 | 9 m | 175 | Xe | Experimental | SITAEL [36] |
| BHT-200 | Hall thruster | 1390 | 13 m | 200 | Xe, Ar | Falconsat-5 | Busek [29] |
| NSTAR Ion | GIT | 3100 | 92 m | 2.3 k | Xe | Deep Space 1 | NASA [37] |
| BIT-3 | RF GIT | 1400 | 0.66 m | 56 | I | SLS EM-1 | Busek [38] |
| MiXi | GIT | 3000 | 1.43 m | 30 | Xe | Experimental | UCLA [22,39] |
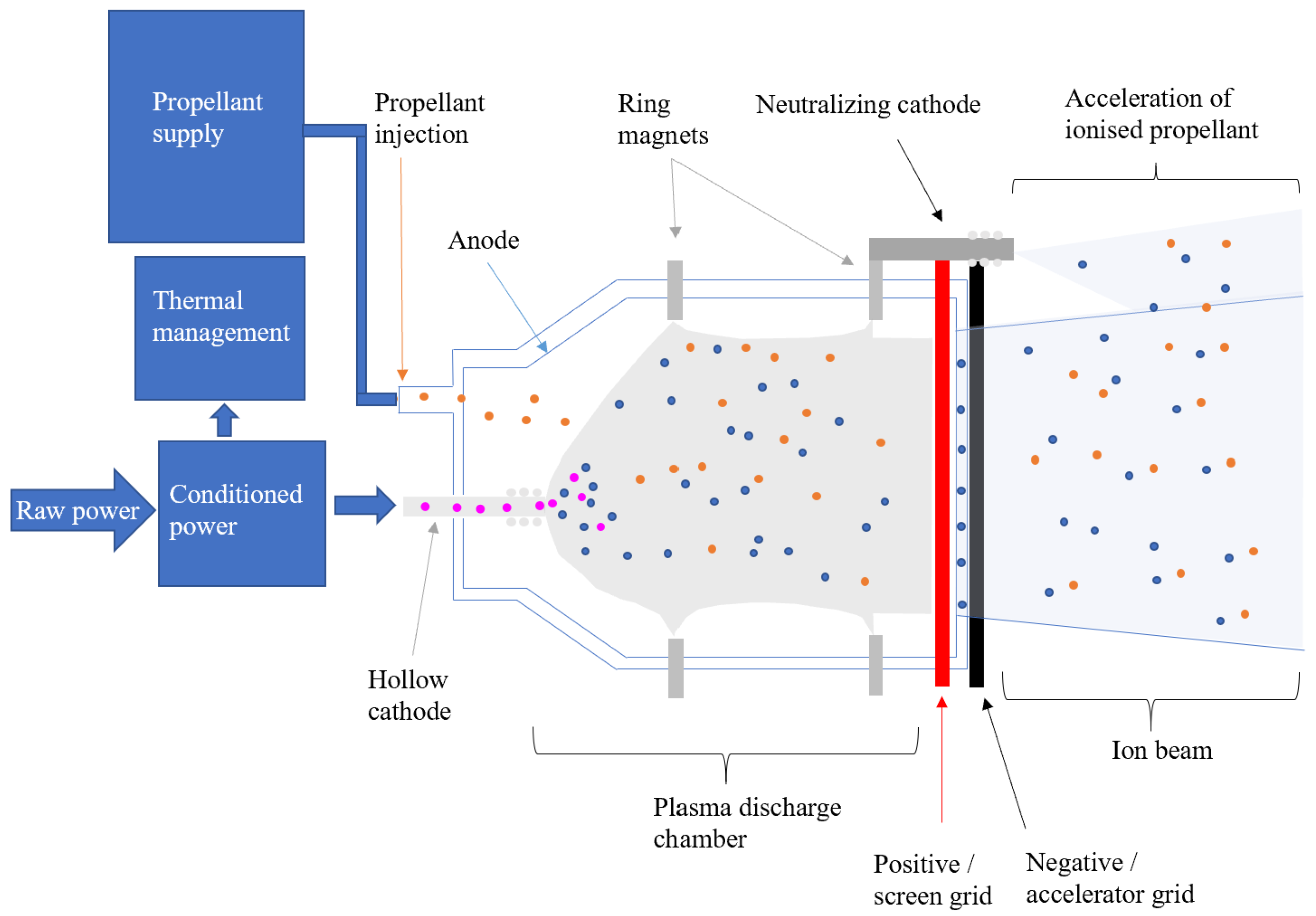
3.2. Gridded Ion Thruster
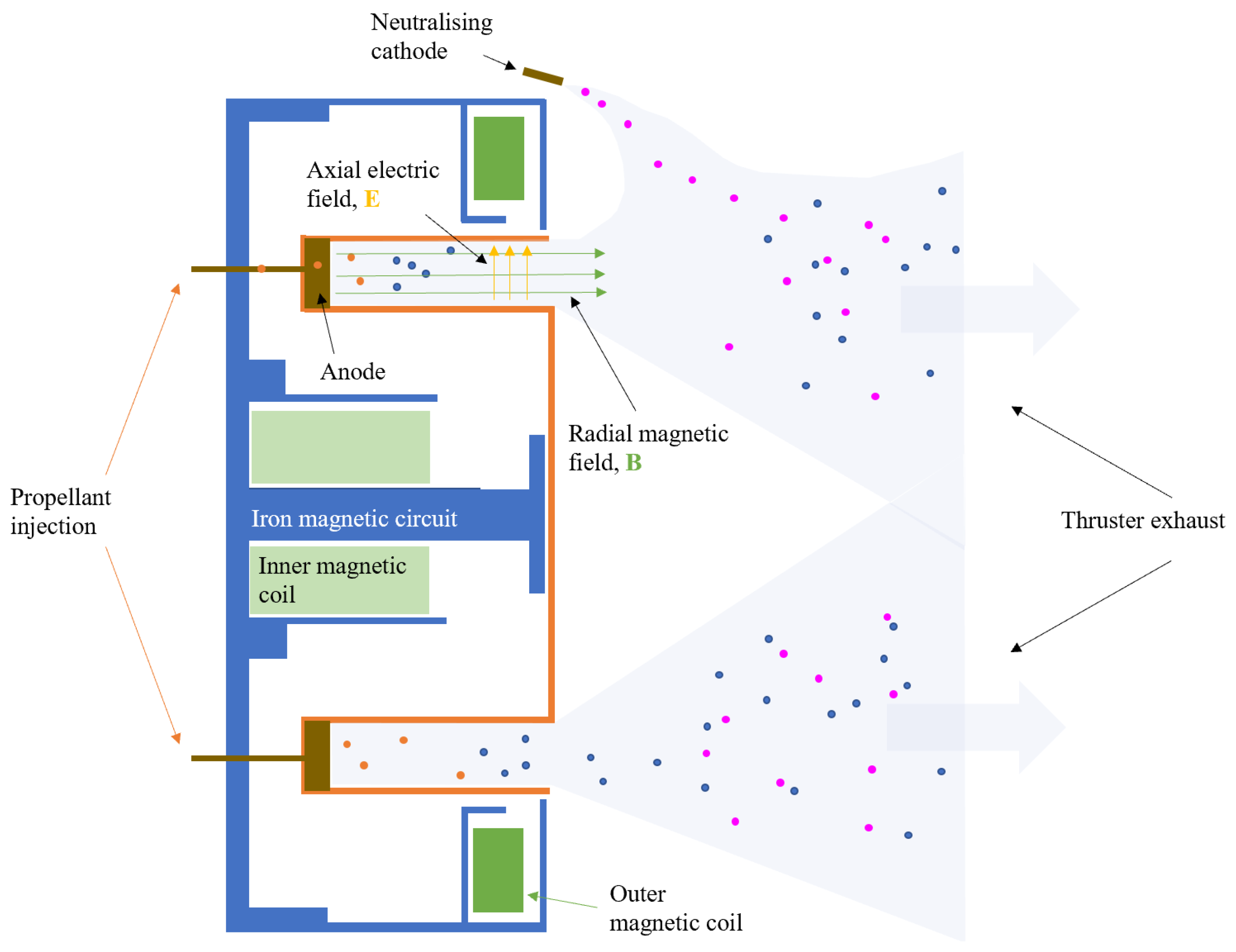
3.3. Hall Thruster
4. Electrothermal
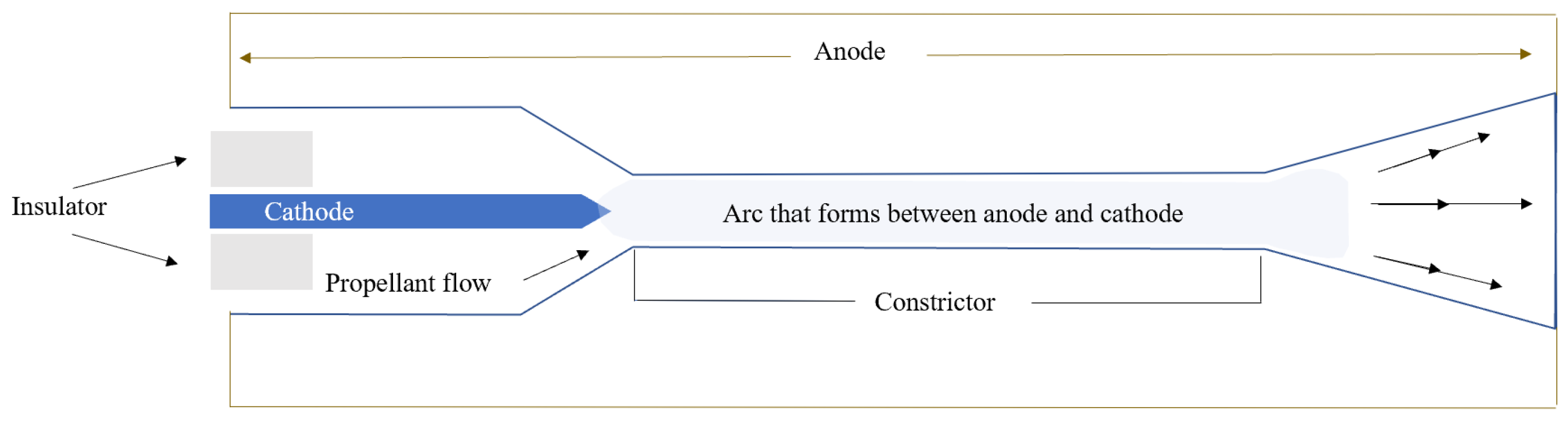
4.1. Arcjet
| Name | Type | Specific Impulse (s) | Thrust (N) | Power (W) | Propellant | Mission Demo | Manufacturer |
|---|---|---|---|---|---|---|---|
| Electrothermal Thrusters | |||||||
| MR-512 | Arcjet | 502 | 254 m | 1.8 kW | NH | Flight Proven | Aerojet [77] |
| MR-502 | Resistojet | 304 | 0.5 | 840 | NH | Flight proven | Aerojet [77] |
| ATOS | Arcjet | 400 | 0.1 | 750 | NH | Flight Proven | IRS, Stuttgart [78] |
| VELARC | Arcjet | 865 | 22.5 | 365 | H | Experimental | IRS, Stuttgart [79] |
| FMMR | Resistojet | 65 | 1.2 | <6 | HO | Experimental | Uni. of S. California [80] |
| AQUARIUS | Resistojet | 70 | 4 m | <20 | HO | SLS EM-1 (2021) | Uni. of Tokyo [81] |
| STAR | Resistojet | 79.42 | 29.8 | 28.55 | Ar | Experimental | Uni. of Southampton [82] |
| Sagami 3 | Arcjet | 480 | <50 m | 300 | NH | Flight Proven | ISAS [83] |
4.2. Resistojet
5. Electromagnetic
5.1. Pulsed Plasma Thrusters
| Name | Type | Specific Impulse (s) | Thrust (N) | Power (W) | Propellant | Mission Demo | Manufacturer |
|---|---|---|---|---|---|---|---|
| Electromagnetic Thrusters | |||||||
| APPT-250 | APPT | 1900 | 1.2 m | 60–120 | Teflon | Experimental | RIAME MAI [96] |
| ADD-SIMPLEX | iMPD | 2761 | 1.373 | <100 | PTFE | Validated | IRS, Stuttgart [98] |
| PETRUS | iMPD | 1567 | 41.46 µ | 5–8 | PTFE | Green Cube | IRS, Stuttgart [98] |
| BmP 220 | PPT | 536 | 0.14 m | <3 | PTFE | FalconSat-3 | Busek [14] |
| MPACS | PPT | 827 | 0.144 m | <10 | PTFE | Falconsat-3 | Busek [14] |
5.2. Magneto-Plasma-Dynamic
6. Alternative Approaches
6.1. Light Sails
6.2. Nuclear
6.3. Other
7. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AM | Additive Manufacturing |
| ALM | Additive Layer Manufacturing |
| BM | Bidirectional Mosfet |
| CAT | Micro Cathode Arc Thruster |
| CEPS | Compact ECR Plasma Source |
| CGS | Cold Gas Thrusters |
| CNC | Computer Numerical Control |
| DAB | Dual Active Bridge |
| DART | Double Asteroid Redirection Test |
| EOL | End of Life |
| EP | Electric Propulsion |
| ESU | Energy Storage Unit |
| ETFE | Ethylene Tetrafluoroethylene |
| FFEP | Field Emission Electric Propulsion |
| GEO | Geostationary Earth Orbit |
| GIT | Gridded Ion Thruster |
| HET | Hall Effect Thruster |
| HTPB | Hydroxl-terminated polybutadiene |
| IGBT | Insulated Gate Bi-Polar Transistor |
| LEO | Low Earth Orbit |
| LRP | Laser Radiation Pressure |
| LPM | Low Power Micro-Resistojet |
| MEO | Middle Earth Orbit |
| ML | Machine Learning |
| MPD | Magnetoplasmadynamic |
| TAL | Thruster with Anode Layer |
| PPT | Pulsed Plasma Thruster |
| PFPE | Liquid perfluoropolyethers |
| PPU | Power Processing Unit |
| RLC | Resistor, Inductor, Capacitor |
| RUL | Remaining Useful Lifetime |
| SLS | Space Launch System |
| SPT | Stationary Plasma Thruster |
| STAR | Super High Temperature Additive Resistojet |
| TEG | Thermal Electric Generator |
| VAT | Vacuum Arc Thruster |
References
- Krejci, D.; Lozano, P. Space Propulsion Technology for Small Spacecraft. IEEE Xplore 2018, 106, 362–376. [Google Scholar] [CrossRef]
- Staehle, R.L.; Anderson, B.; Betts, B.; Blaney, D.; Chow, C.; Friedman, L.; Hemmati, H.; Jones, D.; Klesh, A.; Liewer, P.; et al. Interplanetary CubeSats: Opening the Solar System to a Broad Community at Lower Cost. JoSS 2012, 2, 161–186. Available online: https://jossonline.com/Papers1441.html (accessed on 2 October 2020).
- Lubin, P. A Roadmap to Interstellar Flight. JBIS 2016, 69, 40–72. Available online: https://www.jbis.org.uk/paper/2016.69.40 (accessed on 4 October 2020).
- Levchenko, I.; Xu, S.; Teel, G.; Mariotti, D.; Walker, M.L.R.; Keidar, M. Recent Progress and perspectives of space electric propulsion systems based on smart nanomaterials. Nat. Commun. 2018, 9, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Levchenko, I.; Xu, S.; Mazouffre, S.; Lev, D.; Pedrini, D.; Goebel, D.; Garrigues, L.; Taccogna, F.; Bazaka, K. Perspectives, frontiers, and new horizons for plasma-based space electric propulsion. Phys. Plasmas 2020, 27, 1–18. [Google Scholar] [CrossRef]
- Lev, D.R.; Emsellem, G.D.; Hallock, A.K. The Rise of the Electric Age for Satellite Propulsion. New Space 2017, 5, 4–14. [Google Scholar] [CrossRef]
- Kramer, A.; Bangert, P.; Schilling, K. UWE-4: First Electric Propulsion on a 1U CubeSat—In-Orbit Experiments and Characterization. Aerospace 2020, 7, 98. [Google Scholar] [CrossRef]
- Bonnal, C.; Phipps, D.M.C.; Dupont, C.; Missonnier, S.; Lequette, L.; Merle, M.; Rommelaere, S. Just in time collision avoidance – A review. Acta Astronaut. 2020, 170, 637–651. [Google Scholar] [CrossRef]
- Levchenko, I.; Keidar, M.; Cantrell, J.; Wu, Y.L.; Kuninaka, H.; Bazaka, K.; Xu, S. Explore space using swarms of tiny satellites. Nature 2018, 562, 185–187. [Google Scholar] [CrossRef]
- Racca, G.; Marina, A.; Stagnaro, L. SMART-1 mission description and development status. Planet. Space Sci. 2002, 50, 1323–1337. [Google Scholar] [CrossRef]
- Sternberg, D.; Sternberg, D.; Essmiller, J.; Colley, C.; Klesh, A.; Krajewski, J. Attitude Control System for the Mars Cube One Spacecraft. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Block, D.J.; Astrom, K.J.; Spong, M.W. The Reaction Wheel Pendulum. Synth. Lect. Control Mech. 2007. [Google Scholar] [CrossRef]
- Malphrus, B.K.; Freeman, A.; Staehle, R.; Klesh, A.T.; Walk, R. 4—Interplanetary CubeSat missions. Cubesat Handb. Mission Des. Oper. 2021, 1, 85–111. [Google Scholar] [CrossRef]
- Tummala, A.R.; Dutta, A. An Overview of Cube-Satellite Propulsion Technologies and Trends. Aerospace 2017, 4, 58. [Google Scholar] [CrossRef]
- Lev, D.; Myers, R.; Lemmer, K.; Kolbeck, J.; Koizumi, H.; Polzin, K. The technological and commercial expansion of electric propulsion. Acta Astronaut. 2019, 159, 213–227. [Google Scholar] [CrossRef]
- Hudson, J.; Spangelo, S.; Hine, A.; Kolosa, D.; Lemmer, K. Mission Analysis for CubeSats with Micro propulsion. Spacecr. Rocket. 2016, 53, 5. [Google Scholar] [CrossRef]
- McDowell, J.C. The Low Earth Orbit Satellite Population and Impacts of the SpaceX Starlink Constellation. Astrophys. J. Lett. 2020, 892, 1. [Google Scholar] [CrossRef]
- Levchenko, I.; Xu, S.; Wu, Y.; Bazaka, K. Hopes and concerns for astronomy of satellite constellations. Nat. Astron. 2020, 4, 1012–1014. [Google Scholar] [CrossRef]
- Levchenko, I.; Bazaka, K.; Ding, Y.; Raitses, Y.; Mazouffre, S.; Henning, T.; Klar, P.J.; Shinohara, S.; Schein, J.; Garrigues, L.; et al. Space micropropulsion systems for Cubesats and small satellites: From proximate targets to furthermost frontiers. Appl. Phys. Rev. 2018, 5, 011104. [Google Scholar] [CrossRef]
- Messerschmitt, D.G.; Lubin, P.; Morrison, I. Challenges in Scientific Data Communication from Low-mass Interstellar Probes. Astrophys. J. 2020, 249, 2–10. [Google Scholar] [CrossRef]
- Turner, M.J. Rocket and Spacecraft Propulsion; Astronautical Engineering Springer: Berlin/Heidelberg, Germany, 2006; pp. 14–17. [Google Scholar] [CrossRef]
- Conversano Ryan, W.; Wirz Richard, E. Mission Capability Assessment of CubeSats Using a Miniature Ion Thruster. J. Spacecr. Rocket. 2013, 50, 1036–1037. [Google Scholar] [CrossRef]
- Spangelo, S.; Dalle, D.; Longmier, B. Integrated Vehicle and Trajectory Design of Small Spacecraft with Electric Propulsion for Earth and Interplanetary Missions. In Proceedings of the 29th Annual AIAA/USUConference on Small Satellites, Logan, UT, USA, 8–13 August 2015; pp. 1–16. [Google Scholar]
- Mazouffre, S. Electric propulsion for satellites and spacecraft: Established technologies and novel approaches. Plasma Sources Sci. Technol. 2016, 25, 033002. [Google Scholar] [CrossRef]
- Liu, B.; Li, X.; Yang, J.; Gao, G. Recent Advances in MEMS-Based Microthrusters. Aerospace 2019, 10, 818. [Google Scholar] [CrossRef] [PubMed]
- Thuppul, A.; Wright, P.L.; Collins, A.L.; Ziemer, J.K.; Wirz, R.E. Lifetime Considerations for Electrospray Thrusters. MDPI Aerosp. 2020, 7, 108. [Google Scholar] [CrossRef]
- Krejci, D.; Mier-Hicks, F.; Thomas, R.; Haag, T.; Lozano, P. Emission Characteristics of Passively Fed Electrospray Microthrusters with Propellant Reservoirs. J. Spacecr. Rocket. 2017, 54, 447–458. [Google Scholar] [CrossRef]
- Guerra-Garcia, C.; Krejci, D.; Lozano, P. Spatial uniformity of the current emitted by an array of passively fed electrospray porous emitters. J. Phys. D Appl. Phys. 2016, 49, 1. [Google Scholar] [CrossRef]
- Tsay, M.; Model, J.; Barcroft, C.; Frongillo, J.; Zwahlen, J.; Feng, C. Integrated Testing of Iodine BIT-3 RF Ion Propulsion System for 6U CubeSat Applications. In Proceedings of the 35th International Electric Propulsion Conference Georgia Institute of Technology, Atlanta, GA, USA, 8–12 October 2017; p. 1. [Google Scholar]
- Demmons, N.; Hruby, V.; Spence, D.; Roy, T.; Ehrbar, E.; Zwahlen, J.; Martin, R.; Ziemer, J.; Randolph, T. ST7-DRS Mission Colloid Thruster Development. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Hartford, CT, USA, 21–23 July 2008. [Google Scholar] [CrossRef]
- Chengyu, M.; Charles N, R. The Design and Characterization of a Porous-emitter Electrospray Thruster (PET-100) for Interplanetary CubeSats. In Proceedings of the 7th Interplanetary Cubesat Workshop, Paris, France, 29–30 May 2018; p. 1. Available online: https://icubesat.org/wp-content/uploads/2018/06/b-2-3-201805301309-paper.pdf (accessed on 23 October 2020).
- Bretti, M. AIS-ILIS1 Ionic Liquid Ion Source Electrospray Thruster. Applied Ion Systems LLC. 2020. Available online: https://appliedionsystems.com/portfolio/ais-ilis1-ionic-liquid-ion-source-electrospray-thruster/ (accessed on 2 November 2020).
- Koppel, C.R.; Marchandise, F.; Prioul, M.; Estublier, D.; Darnon, F. The SMART-1 Hall Effect Thruster Around the Moon: In Flight Experience. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Tucson, AZ, USA, 10–13 July 2005. [Google Scholar] [CrossRef]
- Vaudolon, J.; Vial, V.; Cornu, N.; Habbassi, I. PPSR©X00 Thruster Development Status at Safran. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019; Available online: https://www.cheops-h2020.eu/wp/wp-content/uploads/IEPC-2019-241_SAFRAN_Vaudolon.pdf (accessed on 23 October 2020).
- Saevets, P.; Semenenko, D.; Albertoni, R.; Scremin, G. Development of a Long-Life Low-Power Hall Thruster. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017; p. 2. [Google Scholar]
- Misuri, T.; Ducci, C.; Gregucci, S.; Pedrini, D.; Cannelli, F.; Cesari, U.; Nania, F.; Vicini, A.; Pace, G.; Magistro, F.; et al. Recent Advances in Low-Current Hollow Cathodes at SITAEL. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019; p. 8. [Google Scholar]
- Brophy John, R. NASA’s Deep Space 1 ion engine (plenary). Rev. Sci. Instruments 2002, 73, 1075. [Google Scholar] [CrossRef]
- Szabo, J.; Pote, B.; Paintal, S.; Robin, M.; Hillier, A.; Branam, R.D.; Huffmann, R.E. Performance Evaluation of an Iodine-Vapor Hall Thruster. J. Propuls. Power 2012, 28, 848–857. [Google Scholar] [CrossRef]
- Wirz, R.; Sullivan, R.; Przybylowski, J.; Silva, M. Hollow Cathode and Low-Thrust Extraction Grid Analysisfor a Miniature Ion Thruster. Int. J. Plasma Sci. Eng. 2008, 2008, 693825. [Google Scholar] [CrossRef]
- Ziemer, J.; Merkowitz, S. Microthrust Propulsion for the LISA Mission. In Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar] [CrossRef]
- Thuppul, A.; Wright, P.; Wirz, R.E. Lifetime Considerations and Estimation for Electrospray Thrusters. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar] [CrossRef]
- Krejci, D.; Mier-Hicks, F.; Fucetola, C.; Lozano, P. Design and Characterization of a Scalable ion Electrospray Propulsion System. In Proceedings of the 34th International Electric Propulsion Conference and 6th Nano-satellite Symposium, Hyogo-Kobe, Japan, 4–10 July 2015. [Google Scholar]
- Jorns, B.A.; Gorodetsky, A.; Lasky, I.; Kimber, A.; Dahl, P. Uncertainty Quantification of Electrospray Thruster Array Lifetime. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Huh, H.; Wirz, R.E. Numerical Simulation of Electrospray Thruster Extraction. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Ziemer, J.; Marrese-Reading, C.; Dunn, C. Colloid Microthruster Flight Performance Results from Space Technology 7 Disturbance Reduction System. In Proceedings of the The 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Block, D.; Tajmar, M. Highly miniaturized FEEP propulsion system (NanoFEEP) for attitude and orbit control of CubeSats. Acta Astronaut. 2018, 144, 422–428. [Google Scholar] [CrossRef]
- Dale, E.; Jorns, B.; Gallimore, A. Future Directions for Electric Propulsion Research. Aerospace 2020, 7, 120. [Google Scholar] [CrossRef]
- Akhmetzhanov, R.; Bogatyi, A.V.; Kashirin, D.A.; Obukhov, V.A.; Popov, G.A.; Svotina, V.V.; Khartov, S. A Low-Power Ion Thrusters. State of Development at Research Institute of Applied Mechanics and Electrodynamics, MAI. Mater. Sci. Eng. 2020, 927, 1–5. [Google Scholar] [CrossRef]
- Dietz, P.; Gärtner, W.; Koch, Q.; Köhler, P.E.; Teng, Y.; Schreiner, P.R.; Holste, K.; Klar, P.J. Molecular propellants for ion thrusters. Plasma Sources Sci. Technol. 2019, 28, 084001. [Google Scholar] [CrossRef]
- Bekemans, M.; Bronchart, F.; Scalais, T.; Franke, A. Configurable High Voltage Power Supply for Full Electric Propulsion Spacecraft. In Proceedings of the 2019 European Space Power Conference, Juan-les-Pins, France, France, 30 September–4 October 2019. [Google Scholar] [CrossRef]
- Bontempo, J.J.; Brigeman, A.N.; Fain, H.B.; Gonzalez, M.C.; Birchenough, L.R.P.A.G.; Aulisio, M.V.; Fisher, J.; Ferraiuolo, B. The NEXT-C Power Processing Unit: Lessons Learned from the Design, Build, and Test of the NEXT-C PPU for APL’s DART Mission. In Proceedings of the AIAA Propulsion and Energy 2020 Forum, Virtual Event, 24–28 August 2020. [Google Scholar] [CrossRef]
- Yuan, T.; Ren, J.; Zhang, J.Z.Z.; Wang, Y.; Tang, H. The effects of numerical acceleration techniques on PIC-MCC simulations of ion thrusters. AIP Adv. 2020, 10, 045115. [Google Scholar] [CrossRef]
- Lozano, P.; Krejci, D.; Jia-Richards, O. Staging of Ion Propulsion Thrusters. International Patent Application ID PCT/US2019/053784, 30 September 2019. [Google Scholar]
- Krejci, D.; Jenkins, M.G.; Lozano, P. Staging of electric propulsion systems: Enabling an interplanetary Cubesat. Acta Astronaut. 2019, 160, 175–182. [Google Scholar] [CrossRef]
- Rafalskyi, D.; Aanesland, A. A Neutralizer-Free Gridded Ion Thruster Embedded Into A 1U Cubesat Module. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Yang, J.; Jia, S.; ZHANG, Z.; Zhang, X.; LI, T.J.L.; Cai, Y.; Cai, J. Performance of a 4-cm iodine-fueled radio frequency ion thruster. Plasma Sci. Technol. 2020, 22, 094006. [Google Scholar] [CrossRef]
- Nakagawa, Y.; Koizumi, H.; Kawahara, H.; Komurasaki, K. Performance characterization of a miniature microwave discharge ion thruster operated with water. Acta Astronaut. 2019, 157, 294–299. [Google Scholar] [CrossRef]
- Hall, E. On a new action of the magnet on electric currents. Am. J. Math. 1879, 2, 287–292. [Google Scholar] [CrossRef]
- Goebel, D.M.; Katz, I. Fundamentals of Electric Propulsion: Ion and Hall Thrusters; John Wiley & Sons Publishing: Hoboken, NJ, USA, 2008. [Google Scholar] [CrossRef]
- Choueiri, E.Y. Fundamental Difference between the Two Variants of Hall Thrusters: SPT and TAL. In Proceedings of the 37th Joint Propulsion Conference and Exhibit, Salt Lake City, UT, USA, 8–11 July 2001. [Google Scholar] [CrossRef]
- Shcherbanev, V.D.S.; Charoy, T.; Clément, N.; Deltel, C.; Richard, P.; Vincent, S.; Chabert, P.; Bourdon, A. Fast Camera Analysis of Plasma Instabilities in Hall Effect Thrusters Using a POD Method under Different Operating Regimes. Aerospace 2020, 11, 518. [Google Scholar] [CrossRef]
- Greve, C.; Thomas, A.; Majji, M.; Hara, K. Real-time Estimation of Electron Dynamics in Hall Effect Thrusters using an Extended Kalman Filter. In Proceedings of the AIAA Propulsion and Energy 2020 Forum, Virtual Event, 24–28 August 2020. [Google Scholar] [CrossRef]
- Brown, N.P.; Walker, M.L.R. Review of Plasma-Induced Hall Thruster Erosion. MDPI Appl. Sci. 2020, 10, 3775. [Google Scholar] [CrossRef]
- Taccogna, F.; Garrigues, L. Latest Progress in Hall Thrusters Plasma Modelling. Rev. Mod. Plasma Phys. 2019, 3, 1–52. [Google Scholar] [CrossRef]
- Boeuf, J.P. Physics and modelling of Hall thrusters. J. Appl. Phys. 2017, 121, 011101. [Google Scholar] [CrossRef]
- Kinefuchi, K.; Cho, S.; Fukatsu, T.; Tsukizaki, R.; Funaki, I.; Hirano, Y.; Tashiro, Y.; Shiiki, T. Keeper Ignition and Discharge Characteristics of Hollow Cathode Center-Mounted on Hall Thruster. Propuls. Power 2020, 876, 1–8. [Google Scholar] [CrossRef]
- Lev, D.R.; Mikellides, I.G.; Pedrini, D.; Goebel, D.M.; Jorns, B.A.; McDonald, M.S. Recent progress in research and development of hollow cathodes for electric propulsion. Rev. Mod. Plasma Phys. 2019, 3, 6. [Google Scholar] [CrossRef]
- Becatti, G.; Conversano, R.W.; M.Goebel, D. Demonstration of 25,000 ignitions on a proto-flight compact heaterless lanthanum hexaboride hollow cathode. Acta Astronaut. 2020, 178, 181–191. [Google Scholar] [CrossRef]
- Mazouffre, S.; Tsikata, S.; Vaudolon, J. Development and experimental characterisation of a wall-less Hall thruster. J. Appl. Phys. 2014, 116, 3–10. [Google Scholar] [CrossRef]
- Gildea, S.R.; Matlock, T.S.; Martínez-Sánchez, M.; Hargus, W.A., Jr. Erosion Measurements in a Low-Power Cusped-Field Plasma Thruster. Propuls. Power 2013, 29, 906–917. [Google Scholar] [CrossRef]
- Dragnea, H.C.; Ortega, A.L.; Kamhawi, H.; Boyd, I.D. Simulation of a Hall Effect Thruster Using Krypton Propellant. Propuls. Power 2020, 36, 1–8. [Google Scholar] [CrossRef]
- Kamhawi, H. Performance Evaluation of the NASA-300M 20 kW Hall Thruster. In Proceedings of the 47th AIAA/ASME/SAE/ ASEE Joint Propulsion Conference & Exhibit, San Diego, CA, USA, 31 July–3 August 2011. [Google Scholar]
- Blinov, V.; Vavilov, I.S.; Fedynin, V.V.; Shalay, V.V.; Yachmenev, P.S.; Ruban, V.I. Experimental investigations of nitrogen arcjet thruster with control unit for small spacecrafts. J. Phys. 2019, 1210, 1–6. [Google Scholar] [CrossRef]
- Wollenhaupt, B.; Le, Q.H.; Herdrich, G. Overview of thermal arcjet thruster development. Aircr. Eng. Aerosp. Technol. 2018, 90, 280–301. [Google Scholar] [CrossRef]
- Vavilov, I.; Fedynin, V.V.; Yachmenev, P.S.; Zharikov, K.I.; Lukyanchik, A.I.; Stepen, P.V. Review of electric thrusters with low consumption power for corrective propulsion system of small space vehicles. J. Phys. 2020, 1546, 1–10. [Google Scholar] [CrossRef]
- Tang, H.B.; Zhang, X.A.; Liu, Y.; Wang, H.X. Numerical and Experimental Study of a 1-kW Hydrazine Engineering Design Model Arcjet Thruster. J. Aerosp. Eng. 2014, 27, 16–23. [Google Scholar] [CrossRef]
- Zube, D.; Fye, D.; Masuda, I.; Gotoh, Y. Low bus voltage hydrazine arcjet system for geostationary satellites. In Proceedings of the 34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Cleveland, OH, USA, 13–15 July 1998. [Google Scholar] [CrossRef]
- Dropmann, M.; Ehresmann, M.; Pagan, A.S.; Le, Q.H.; Romano, F.; Montag, C.; Herdrich, G. Low Power Arcjet Application for End of Life Satellite Servicing. In Proceedings of the 7th European Conference on Space Debri, Darmstadt, Germany, 18–21 April 2017; Available online: http://spacedebris2017.sdo.esoc.esa.int (accessed on 17 October 2020).
- Herdrich, G.; Bauder, U.; Boxberger, A.; Eichhorn, C.; Lau, M.; Pfeiffer, M.; Stindl, T.; Syring, C.; Wollenhaupt, B.; Röser, H.P.; et al. Overview on Electric Propulsion Development at IRS. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Lee, R.; Lilly, T.; Muntz, E.; Ketsdever, A. Free Molecule Micro-Resistojet: Nanosatellite Propulsion. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Tucson, AZ, USA, 10–13 July 2005. [Google Scholar] [CrossRef]
- Asakawa, J.; Koizumi, H.; Nishii, K.; Takeda, N.; Murohara, M.; Funase, R.; Komurasaki, K. Fundamental Ground Experiment of a Water Resistojet Propulsion System: AQUARIUS Installed on a 6U CubeSat: EQUULEUS. Trans. Jpn. Soc. Aeronaut. Space Sci. Aerosp. Technol. Jpn. 2018, 16, 427–431. [Google Scholar] [CrossRef]
- Romei, F.; Grubišić, A.; Lasagna, D.; Gibbon, D. Multiphysics Model Validation of Resistojets with Concentric Tubular Heat Exchanger. In Proceedings of the 7th European Conference for Aeronautics and Space Science, Milan, Italy, 4–7 December 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Wollenhaupt, B.L.; Hammer, A.; Herdrich, G.; Fasoulas, S.; Röser, H.-P. A Very Low Power Arcjet (VELARC) for Small Satellite Missions. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Shen, Y.; Tong, Y.; Wei, F.; Yao, Z.; HU, D. Influences of characteristic parameters on starting-up process of an arcjet thruster. Chin. J. Aeronaut. 2020, 34, 7. [Google Scholar] [CrossRef]
- Kaminska, A.; Bialek, A.; Dudeck, M. Performances of an argon arc-jet thruster for satellites. J. Phys. 2014, 60, 549–559. Available online: http://www.nipne.ro/rjp/2015_60_3-4/RomJPhys.60.p549.pdf (accessed on 12 October 2020).
- Skalden, J.; Herdrich, G.; Ehresmann, M.; Fasoulas, S. Development Progress of an Adaptable Deorbit System for Satellite Constellations. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Rovey, J.L.; Lyne, C.T.; Mundahl, A.J.; Rasmont, N.; Glascock, M.S.; Wainwright, M.J.; Berg, S.P. Review of multimode space propulsion. Prog. Aerosp. Sci. 2020, 118, 2–10. [Google Scholar] [CrossRef]
- Cervone, A.; Zandbergen, B.; Guerrieri, D. Green micro-resistojet research at Delft University of Technology: New options for Cubesat propulsion. CEAS Space J. 2017, 9, 111–125. [Google Scholar] [CrossRef]
- Evans, M.E.; Graham, L.D. A Flexible Lunar Architecture for Exploration (FLARE) supporting NASA’s Artemis Program. Acta Astronaut. 2016, 177, 351–372. [Google Scholar] [CrossRef]
- Koizumi, H.; Asakawa, J.; Nakagawa, Y.; Nishii, K.; Takao, Y.; Nakano, M.; Funase, R. Assessment of Micropropulsion System Unifying Water Ion Thrusters and Water Resistojet Thrusters. Spacecr. Rocket. 2019, 56, 2–7. [Google Scholar] [CrossRef]
- Kim, H.S.; Young-Shin, L. Optimization design technique for reduction of sloshing by evolutionary methods. Mech. Sci. Technol. 2007, 22, 25–33. [Google Scholar] [CrossRef]
- Romei, F.; Grubišić, A.N. Validation of an additively manufactured resistojet through experimental and computational analysis. Acta Astronaut. 2017, 167, 14–22. [Google Scholar] [CrossRef]
- Woodruff, C. Monofilament Vaporization Propulsion Systems. U.S. Patent Application 10,724,480, 28 July 2020. [Google Scholar]
- Webber, C.R. Plasma, Ion-Thrusters, and VASIMR; ASEN 5053; University of Colorado Boulder: Boulder, CO, USA, 2011; pp. 1–9. [Google Scholar]
- MITOpenCourseWare2015. Plasma Accelerators/Magnetoplasmadynamic (MPD)Thrusters; Massachusetts Institute of Technology: Cambridge, MA, USA, 2015; pp. 1–14. [Google Scholar]
- Antropov, N.; Bogaty, A.; Boykachev, V. Development of Russian Next-generation Ablative Pulsed Plasma Thrusters. Procedia Eng. 2017, 185, 56. [Google Scholar] [CrossRef]
- Montag, C.; Burghaus, H.; Herdrich, G.; Schönherr, T. Developmemnt of a new pulsed plasma thruster and a brief introduction of a planned test facility. In Proceedings of the 67th International Astronautical Congress, Guadalajara, Mexico, 26–30 September 2016. [Google Scholar]
- Herdrich, G.; Binder, T.; Boxberger, A.; Chadwick, A.; Chan, Y.A.; Ehresmann, M.; Harmansa, N.; Montag, C.; Romano, F.; Skalden, J.; et al. Research and Development on Electric and Advanced Propulsion at IRS. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017; p. 4. [Google Scholar]
- Lau, M.; Herdrich, G. Pulsed Plasma Thruster Endurance Operation Stress Testing at IRS. In Proceedings of the 33rd International Electric Propulsion Conference, Washington, DC, USA, 6–10 October 2013. [Google Scholar]
- Chan, Y.A.; Montag, C.; Herdrich, G.; Schönherr, T. Review of Thermal Pulsed Plasma Thruster-Design, Characterisation, and Application. In Proceedings of the 34th International Electric Propulsion Conference and 6th Nano-satellite Symposium, Hyogo-Kobe, Japan, 4–10 July 2015. [Google Scholar]
- Ling, W.Y.L.; ZHANG, S.; FU, H.; Huang, M.; Quansah, J.; Liu, X.; Wang, N. A brief review of alternative propellants and requirements for pulsed plasma thrusters in micropropulsion applications. Chin. J. Aeronaut. 2020, 1000-9361, 1–12. [Google Scholar] [CrossRef]
- Polzin, K.; Martin, A.; Little, J.; Promislow, C.; Jorns, B.; Woods, J. State-of-the-Art and Advancement Paths for Inductive Pulsed Plasma Thrusters. Aerospace 2020, 7, 105. [Google Scholar] [CrossRef]
- Lau, M.; Herdrich, G.; Grabe, M. Experimental Characterization of a Scalable Pulsed Magnetoplasmadynamic Propulsion System. In Proceedings of the European Space Propulsion Conference, Cologne, Germany, 19–22 May 2014. [Google Scholar]
- Montag, C.; Herdrich, G.; Schönherr, T. Modifications and Experimental Analysis towards an Update of the Pulsed Plasma Thruster PETRUS. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Montag, C.; Herdrich, G.; del Amo, J.G.; Bauer, P.; Feyhl, D. PETRUS 2.0 PPT and its CubeSat-size PPU: Testing and Characterization. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Wang, B.; Yang, W.; Tang, H.; Li, Z.; Kitaeva, A.; Chen, Z.; Cao, J.; Herdrich, G.; Zhang, K. Target thrust measurement for applied-field magnetoplasmadynamic thruster. Meas. Sci. Technol. 2018, 29, 1–10. [Google Scholar] [CrossRef]
- Choueiri, E.Y. New Dawn for Electric Propulsion. Sci. Am. 2009, 300, 58–65. [Google Scholar] [CrossRef] [PubMed]
- Coogan, W.J.; Choueiri, E. A Critical Review of Thrust Models for Applied-Field Magnetoplasmadynamic Thrusters. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017; pp. 1–27. [Google Scholar]
- Coletti, M. A thrust formula for an MPD thruster with applied-magnetic field. Acta Astronaut. 2012, 81, 667–674. [Google Scholar] [CrossRef]
- Wartelski, M.; Xavier, S. Method for Controlling the Temperature of an Electric Propulsion System. U.S. Patent Application No. WO/2018/007540, 1 November 2018. [Google Scholar]
- Verma, A.; Ganguli, A.; Sahu, D.; Narayanan, R.; Tarey, R.D. Thrust evaluation of Compact ECR Plasma Source using 2-Zone global model and plasma measurements. Plasma Sources Sci. Technol. 2020, 29, 8–16. [Google Scholar] [CrossRef]
- Ou, Y.; Wu, J.; Zhang, Y. Design and experimental results of a laser-ignited solid-propellant-fed magnetoplasmadynamic thruster. Rev. Sci. Instruments 2020, 91, 1. [Google Scholar] [CrossRef]
- Wu, P.; Wang, Y.; Li, Y.; Wang, B.; Zhang, K.; Tang, H.; Cao, J. Cathode erosion site distributions in an applied-field magnetoplasmadynamic thruster. Plasma Sci. Technol. 2020, 22, 7. [Google Scholar] [CrossRef]
- Zolotukhin, D.; Daniels, K.; Keidar, M. Discharge characteristics of two-stage micro-cathode arc MPD thrusters with a permanent magnet and a pulsed magnetic field. J. Appl. Phys. 2020, 54, 1. [Google Scholar] [CrossRef]
- List, M.; Bremer, S.; Rievers, B.; Selig, H. Modelling of Solar Radiation Pressure Effects: Parameter Analysis for the MICROSCOPE Mission. Int. J. Aerosp. Eng. 2015, 2015, 3–11. [Google Scholar] [CrossRef]
- Spencer, D.A.; Betts, B.; Bellardo, J.M.; Diaz, A.; Plante, B.; R.Mansell, J. The LightSail 2 solar sailing technology demonstration. Adv. Space Res. 2020, 1–8. [Google Scholar] [CrossRef]
- Atwater, H.A.; Davoyan, A.R.; Ilic, O.; Jariwala, D.; Sherrott, M.C.; Went, C.M.; Whitney, W.S.; Wong, J. Materials challenges for the Starshot lightsail. Nat. Mater. 2018, 17, 861–867. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Fan, W.; Jin, Y.; Wang, D.; Liu, T. Free-standing flexible graphene-based aerogel film with high energy density as an electrode for supercapacitors. Nano Mater. Sci. 2020, 1–15. [Google Scholar] [CrossRef]
- Heller, R.; Anglada-Escudé, G.; Hippke, M.; Kervella, P. Low-cost precursor of an interstellar mission. Astron. Astrophys. 2020, 641, 1. [Google Scholar] [CrossRef]
- Parker, J.; Peterson, C.W.; Yifat, Y.; Rice, S.A.; Yan, Z.; Gray, S.K.; Scherer, N.F. Optical matter machines: Angular momentum conversion by collective modes in optically bound nanoparticle arrays. Optica 2020, 7, 1341. [Google Scholar] [CrossRef]
- Phipps, C.; Birkan, M.; Bohn, W.; Horisawa, H.A.E.A.H.; Lippert, T.; Michaelis, M.; Rezunkov, Y.; Sasoh, A.; Schall, W.; Scharring, S.; et al. Review: Laser-Ablation Propulsion. J. Propuls. Power 2010, 26, 611–632. [Google Scholar] [CrossRef]
- Voss, S.S. Nuclear Security Considerations for Space Nuclear Power: A Review of Past Programs with Recommendations for Future Criteria. Nucl. Technol. 2019, 206, 1097–1108. [Google Scholar] [CrossRef]
- Lin, C.S.; Youinou, G.J. Design and Analysis of a 250 MW Plate-Fuel Reactor for Nuclear Thermal Propulsion; U.S. Department of Energy Office of Scientific and Technical Information: Oak Ridge, TN, USA, 2020.
- Tenneti, A.; Hampika, G.; Rohit, V.; Guduri, M. Interstellar Space Travel Using Nuclear Propulsion. Energy Syst. Drives Autom. 2019, 664, 331. [Google Scholar] [CrossRef]
- Bahmani, J. Reduction in inertial confinement fusion ignition energy of3He-3He plasma by laser-accelerated deuterons. Hydrog. Energy 2020, 45, 16672–16676. [Google Scholar] [CrossRef]
- Giuffrida, L.; Belloni, F.; Margarone, D.; Petringa, G.; Milluzzo, G.; Scuderi, V.; Velyhan, A.; Rosinski, M.; Picciotto, A.; Milan, K.; et al. High-current stream of energetic α particles from laser-driven proton-boron fusion. Phys. Rev. E. 2020, 101, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Vyas, A.C.; Cassibry, J.T. Numerical modelling of compact toroid formation and propagation for magneto-inertial fusion research. In Proceedings of the AIAA Propulsion and Energy 2020 Forum, Virtual Event, 24–28 August 2020. [Google Scholar] [CrossRef]
- Litchford, R.J. Prospects for Interstellar Propulsion; Space Technology Mission Directorate, NASA: Washington, DC, USA, 2020.
- White House. A New Era for Deep Space Exploration and Development; National Space Council: Huntsville, AL, USA, 26 March 2020.
- Raj, J.K.; Parks, G. Development of a deep space nuclear electric propulsion (NEP)system –a NuAER plasma NEP reactor. In Proceedings of the AIAA Propulsion and Energy 2020 Forum, Virtual Event, 24–28 August 2020; pp. 1–14. [Google Scholar] [CrossRef]
- Torres, A.S. Radioisotope Power Systems for Space Applications. Appl. Phys. Sci. 2010, 12, 457–471. [Google Scholar] [CrossRef]
- Howe, T.M.H.S.; Miller, J.R. Advanced Thermoelectric Power Generation System for Low Enriched Uranium Fuel Reactors. Int. Conf. Environ. Syst. 2020, 1–11. Available online: https://ttu-ir.tdl.org/bitstream/handle/2346/86284/ICES-2020-180.pdf?sequence=1 (accessed on 3 November 2020).
- Lappas, V.; Tsourdos, A.; Kindylides, S.; Kostopoulos, V. A Low Cost Thermoelectric Generator for Small Satellites. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- He, S.; Xia, Y.; Xu, F.; Zhou, L.; Quyang, X. A Nuclear Decay Micropropulsion Technology Based on Spontaneous Alpha Decay. Nucl. Sci. Eng. 2020, 1–6. [Google Scholar] [CrossRef]
- Musinski, L.; Liu, T.; Gilchrist, B.; Gallimore, A.; Keidar, M. Experimental Results and Modeling Advances in the Study of the Nanoparticle Field Extraction Thruster. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Cincinnati, OH, USA, 8–11 July 2007. [Google Scholar] [CrossRef]
- Sullivan, D.; Kline, J.; Philippe, C.; Micci, M. Current status of the microwave arcjet thruster. In Proceedings of the 31st Joint Propulsion Conference and Exhibit, San Diego, CA, USA, 10–12 July 1995; pp. 1–8. [Google Scholar] [CrossRef]
- Yildiz, M.S. Experimental Performance Analysis of the BUSTLab Microwave Electrothermal Thruster. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar] [CrossRef]
- Squire, J.P.; Carter, M.; Diaz, F.R.C.; Corrigan, A.; Dean, L.; Farrias, J.; Giambusso, M.; McCaskill, G.; Yao, T. Steady-state Testing at 100 kW in the VASIMR®VX-200SS Project. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Bathgate, S.; BILEKD, M.M.M.; MCKENZIE, R. Electrodeless plasma thrusters forspacecraft: A review. Plasma Sci. Technol. 2017, 19, 24. [Google Scholar] [CrossRef]
- Frisbee, R.H.; Mikellides, I.G. The Nuclear-Electric Pulsed Inductive Thruster (NuPIT):Mission Analysis for Prometheus. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Tucson, AZ, USA, 10–13 July 2005. [Google Scholar]
- West, J.L.M.D.; Lafleur, T.; Charles, C.; Boswell, R.W. Thrust measurements in a low-magnetic field high-density mode in the helicon double layer thruster. J. Phys. D Appl. Phys. 2010, 43, 2–8. [Google Scholar] [CrossRef]
- Romano, F.; Chan, Y.A.; Herdrich, G.; Traub, C.; Fasoulas, S.; Roberts, P.C.E.; Smith, K.; Edmondson, S.; Haigh, S.; Crisp, N.H.; et al. RF Helicon-based Inductive Plasma Thruster (IPT) Design for an Atmosphere-Breathing Electric Propulsion system (ABEP). Acta Astronaut. 2020, 176, 476–483. [Google Scholar] [CrossRef]
- Churaman, W.; Morris, C.J.; Currano, L.J.; Bergbreiter, S. On-chip porous silicon microthruster for robotic platforms. In Proceedings of the 17th International Conference on Solid-State Sensors, Actuators and Microsystems, Barcelona, Spain, 16–20 June 2013; pp. 1599–1602. [Google Scholar] [CrossRef]
- Manchester, Z.R.; Peck, M. Stochastic Space Exploration with Microscale Spacecraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, Oregon, 8–11 August 2011. [Google Scholar] [CrossRef]
- Hu, W.; Welch, C.; Ancona, E. A Minimal Chipsat Interstellar Mission: Technology and Mission Architecture. In Proceedings of the 69th International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Liu, J.; Li, G.; Zhu Zheng, H.; Zhan, X. Orbital boost characteristics of spacecraft by electrodynamic tethers with consideration of electric-magnetic-dynamic energy coupling. Acta Astronaut. 2020, 171, 196–207. [Google Scholar] [CrossRef]
- Liu, J.; Li, G.; Zhu Zheng, H.; Liu, M.; Zhan, X. Automatic orbital maneuver for mega-constellations maintenance with electrodynamic tethers. Aerosp. Sci. Technol. 2020, 105, 1–8. [Google Scholar] [CrossRef]
- Pietzka, M. Development and Characterization of a Propulsion System for CubeSats Based on Vacuum Arc Thrusters. Ph.D. Thesis, Munich University, Munich, Germany, 2016; pp. 2–16. Available online: http://d-nb.info/1115728423 (accessed on 3 November 2020).
- Li, Y.H.; Pan, J.Y.; Herdrich, G. Design and demonstration of micro-scale vacuum cathode arc thruster with inductive energy storage circuit. Acta Astronaut. 2020, 172, 33–46. [Google Scholar] [CrossRef]
- Kolbeck, J.; Anders, A.; Beilis, I.I.; Keidar, M. Micro-propulsion based on vacuum arcs. J. Appl. Phys. 2019, 125, 1–10. [Google Scholar] [CrossRef]
- Chan, Y.A.; Herdrich, G. Influence of Cathode Dimension on Discharge Characteristics of Inertial Electrostatic Confinement Thruster. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019; pp. 1–8. [Google Scholar]
- Chan, Y.A.; Herdrich, G. Inertial Electrostatic Confinement: Innovation for Electric Propulsion and Plasma Systems. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017; pp. 1–9. [Google Scholar]
- Bok, C.B.; Comeau, A.; Dolgopolov, A.; Halt, T.; Juang, C.; Smith, P. SmallSats by the Numbers. Bryce and Space Technology. 2020, pp. 5–10. Available online: https://brycetech.com/reports/report-documents/Bryce_Smallsats_2020.pdf (accessed on 4 November 2020).














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
O’Reilly, D.; Herdrich, G.; Kavanagh, D.F. Electric Propulsion Methods for Small Satellites: A Review. Aerospace 2021, 8, 22. https://doi.org/10.3390/aerospace8010022
O’Reilly D, Herdrich G, Kavanagh DF. Electric Propulsion Methods for Small Satellites: A Review. Aerospace. 2021; 8(1):22. https://doi.org/10.3390/aerospace8010022
Chicago/Turabian StyleO’Reilly, Dillon, Georg Herdrich, and Darren F. Kavanagh. 2021. "Electric Propulsion Methods for Small Satellites: A Review" Aerospace 8, no. 1: 22. https://doi.org/10.3390/aerospace8010022
APA StyleO’Reilly, D., Herdrich, G., & Kavanagh, D. F. (2021). Electric Propulsion Methods for Small Satellites: A Review. Aerospace, 8(1), 22. https://doi.org/10.3390/aerospace8010022