Future Directions for Electric Propulsion Research



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
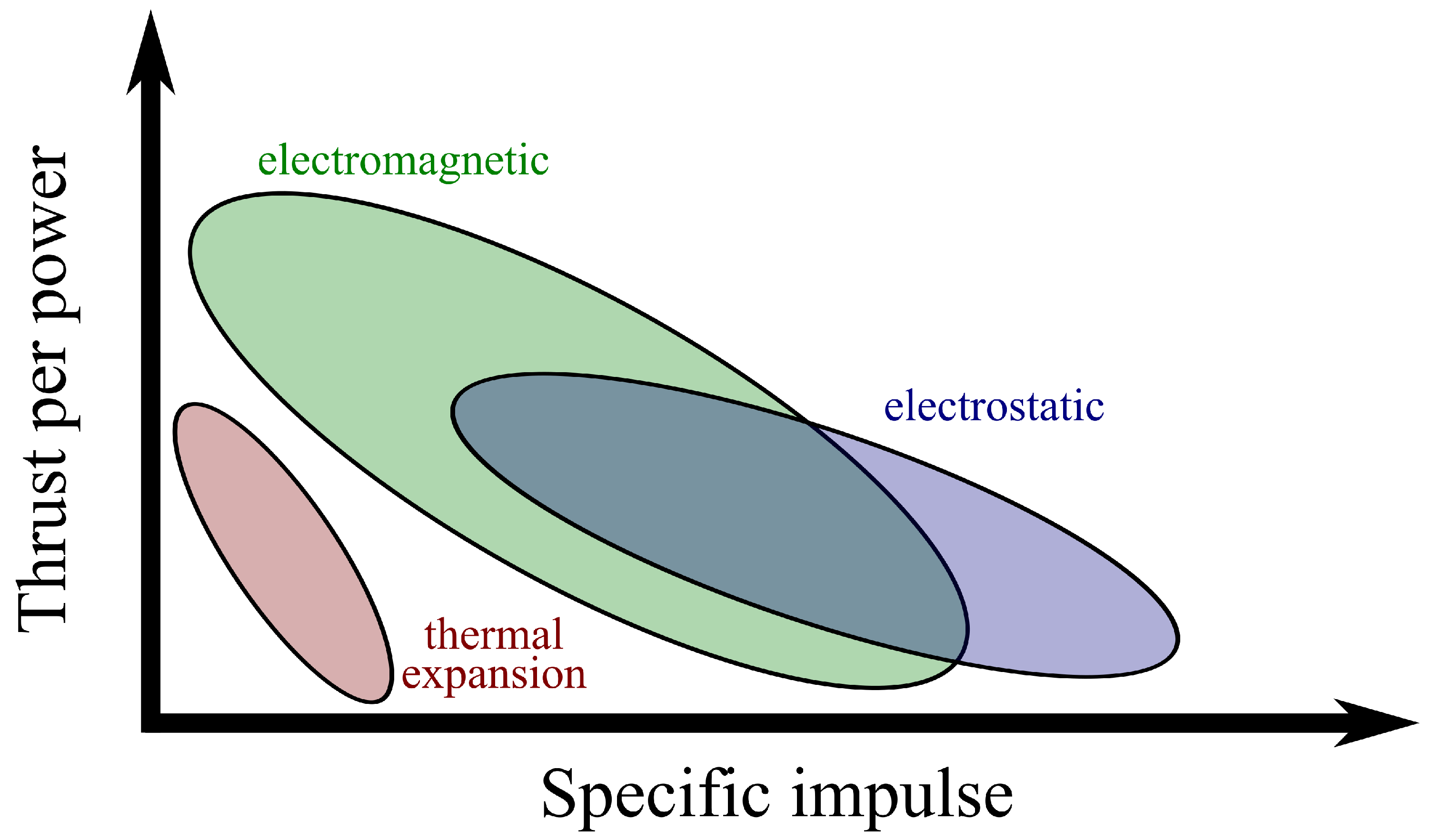
2. Types of Electric Propulsion
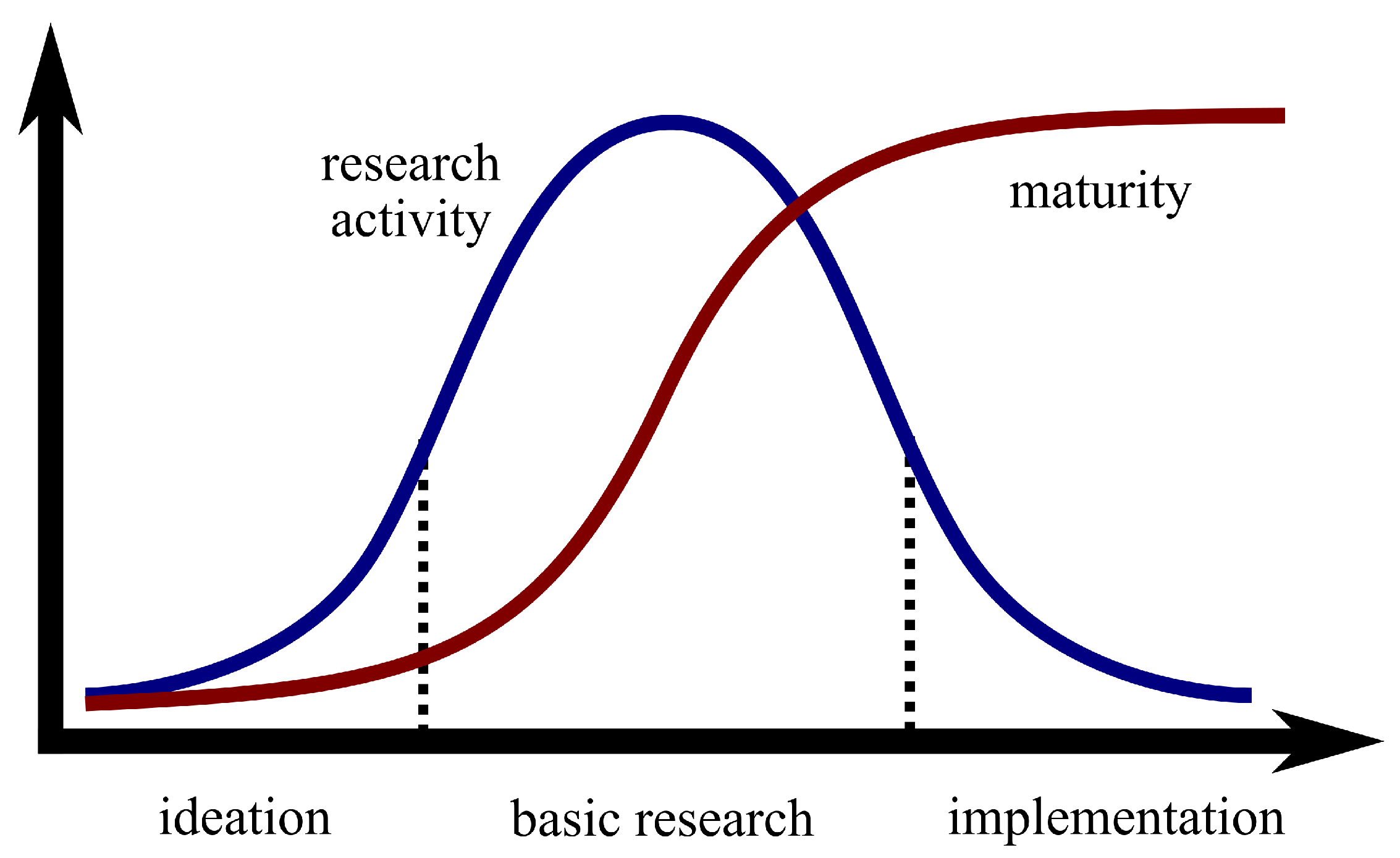
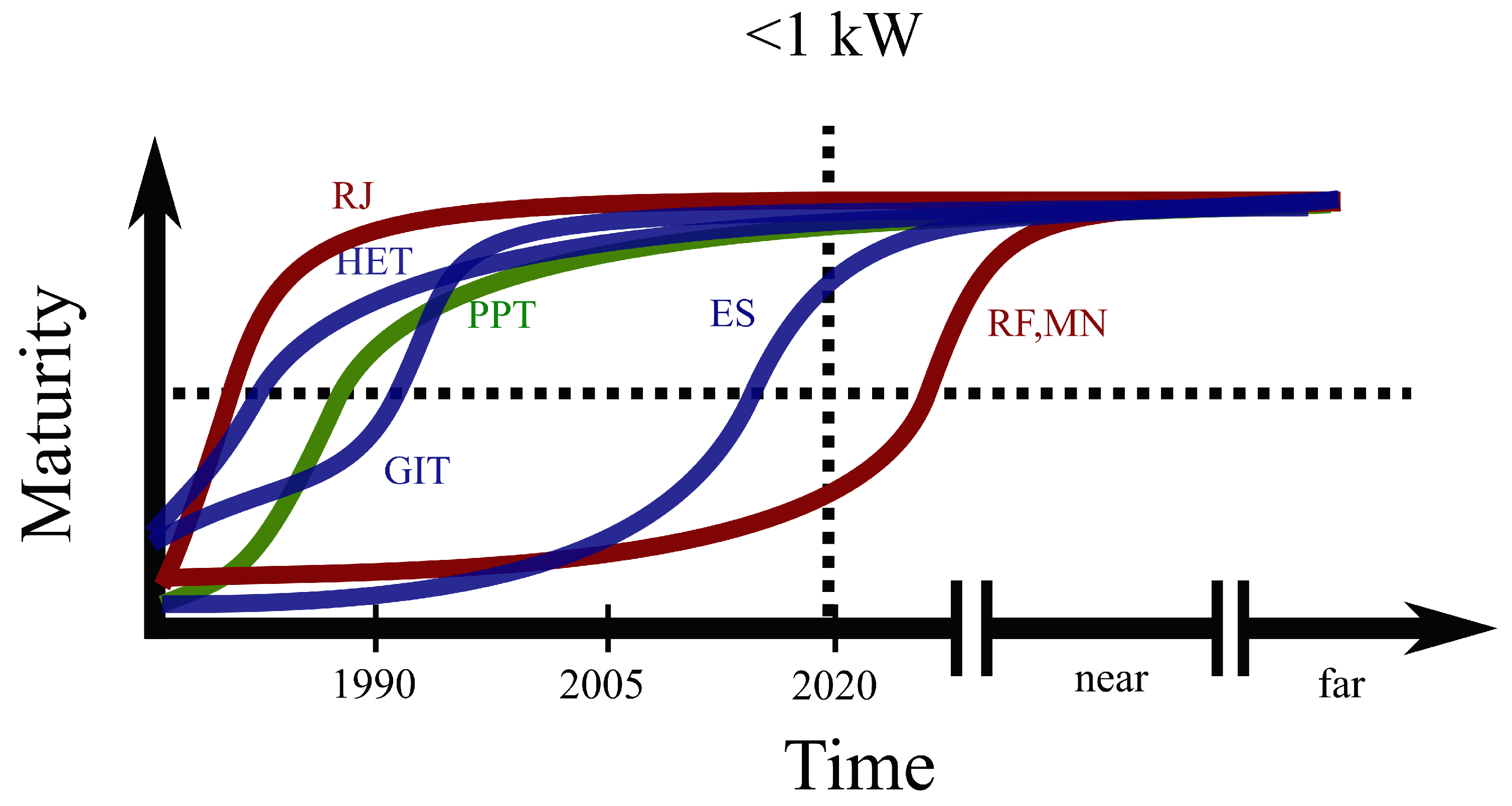
3. Electric Propulsion Development Cycles
4. Challenges for Electric Propulsion Development
4.1. Low-Power Thrusters
4.1.1. Sub-Kilowatt Hall Thrusters
4.1.2. Sub-Kilowatt Gridded Ion Thrusters
4.1.3. Electrosprays
4.1.4. Magnetic Nozzles
4.1.5. Pulsed Plasma Thrusters
4.2. Moderate-Power Thrusters
4.2.1. Hall Effect Thrusters
4.2.2. Gridded Ion Thrusters
4.2.3. Pulsed Inductive Thrusters
4.3. High-Power Thrusters
4.3.1. High-Power Hall Effect Thrusters
4.3.2. High-Power Gridded Ion Thrusters
4.3.3. Magnetoplasmadynamic Thrusters
4.3.4. Large-Scale Electrospray Arrays
4.3.5. Pulsed Inductive Thrusters
4.3.6. Magnetic Nozzles
4.3.7. Nuclear Thermal Propulsion
4.4. Summary of Shared Challenges for Electric Propulsion Technology Development
4.4.1. Technologies High on The S-Curve
- Understanding anomalous processes and instabilities to allow for self-consistent modeling;
- Modeling or mitigating facility effects to allow for more meaningful ground testing;
- Finding alternatives to long-duration testing to characterize reliability, long-term performance, and time-dependent failure mechanisms.
- Requirements for a test environment to adequately represent space-like conditions must be formulated accounting for the unique characteristics of modern mature EP technologies;
- Formulate strategies to make ground facilities more flight-like;
- Improved predictive and validated models for qualification efforts to address problems related to facility interactions and stability.
4.4.2. Technologies Lower on The S-Curve
- Scaling to low power incurs increasing ionization cost;
- Optimal performance is anticipated above practical or economical power levels for laboratory development (typically ≫100 kW);
- Incomplete theoretical understanding of performance or lifetime.
- Establish the theoretical bounds in performance and identify any fundamental limitations;
- Develop techniques for optimization that more rapidly allow the theoretical performance to be realized experimentally.
5. Strategies for Addressing Technical Challenges for Electric Propulsion Development
5.1. Facility Effects
5.2. Lifetime Extension and Qualification
5.3. Predictive Models for Incompletely-Understood Systems
5.4. Power and Propellant Improvements
6. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rogers, E.M. Diffusion of Innovations, 3rd ed.; The Free Press: New York, NY, USA, 1983. [Google Scholar]
- Lev, D.; Myers, R.M.; Lemmer, K.M.; Kolbeck, J.; Koizumi, H.; Polzin, K. The technological and commercial expansion of electric propulsion. Acta Astronaut. 2019, 159, 213–227. [Google Scholar] [CrossRef]
- Arkhipov, B.; Bober, A.; Day, M.; Gnizdor, R.; Kozubsky, K.; Maslennikov, N. Extending the range of SPT operation—Development status of 300 and 4500 W thruster. In Proceedings of the 32nd Joint Propulsion Conference and Exhibit, Lake Buena Vista, FL, USA, 1–3 July 1996; American Institute of Aeronautics and Astronautics: Lake Buena Vista, FL, USA, 1996. [Google Scholar]
- Zakharenkov, L.E.; Semenkin, A.V. Measurement Features and Results of TAL D-55 Plume. In Proceedings of the 29th International Electric Propulsion Conference, Princeton, NJ, USA, 31 October–4 November 2005. [Google Scholar]
- Lyszyk, M.; Klinger, E.; Secheresse, O.; Bugeat, J.; Valentian, D.; Cadiou, A.; Beltan, T.; Gelas, C. Qualification status of the PPS 1350 plasma thruster. In Proceedings of the 35th Joint Propulsion Conference and Exhibit, Los Angeles, CA, USA, 20–24 June 1999; American Institute of Aeronautics and Astronautics: Los Angeles, CA, USA, 1999. [Google Scholar]
- Duchemin, O.B.; Rabin, J.; Balika, L.; Diome, M.; Vuglec, D.; Cavelan, X.; Leroi, V. Development & Qualification Status of the PPS5000 Hall Thruster Unit. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018; American Institute of Aeronautics and Astronautics: Cincinnati, OH, USA, 2018. [Google Scholar]
- Hruby, V.; Monheiser, J.; Pote, B.; Rostler, P.; Kolencik, J.; Freeman, C. Development of low power Hall thrusters. In Proceedings of the 30th Plasmadynamic and Lasers Conference, Norfolk, VA, USA, 28 June 1999; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1999. [Google Scholar]
- Bober, A.; Kozubsky, K.; Komarow, G.; Maslennikov, N.; Kozlov, A.; Romashko, A. Development and Qualification Test of a SPT Electric Propulsion System for “GALS” Spacecraft. In Proceedings of the 23rd AIAA/AIDAA/DGLR/JSASS International Electric Propulsion Conference, Seattle, WA, USA, 13–16 September 1993; p. 8. [Google Scholar]
- Pidgeon, D.; Corey, R.; Sauer, B.; Day, M. Two Years of On-Orbit Performance of SPT-100 Electric Propulsion. In Proceedings of the 24th AIAA International Communications Satellite Systems Conference, San Diego, CA, USA, 11–14 June 2006; American Institute of Aeronautics and Astronautics: San Diego, CA, USA, 2006. [Google Scholar]
- Sommerville, J.D.; Fruncek, C.E.; King, L.B.; Makela, J.M.; Terhune, K.J.; Washeleski, R.L.; Myers, R.M. Performance of the Aurora Low-Power Hall-Effect Thruster. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- VanWoerkom, M.; Gorokhovsky, V.; Pulido, G.; Seidcheck, A.; Williams, J.; Farnell, C. Test Results of ExoTerra’s Halo Micro Electric Propulsion System for Microsatellites. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 9–22 August 2019; American Institute of Aeronautics and Astronautics: Indianapolis, IN, USA, 2019. [Google Scholar] [CrossRef]
- Gurciullo, A.; Jarrige, J.; Lascombes, P.; Packan, D. Experimental performance and plume characterisation of a miniaturised 50W Hall thruster. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Lee, E.; Kim, Y.; Lee, H.; Kim, H.; Doh, G.; Lee, D.; Choe, W. Scaling Approach for Sub-Kilowatt Hall-Effect Thrusters. J. Propuls. Power 2019, 35, 1073–1079. [Google Scholar] [CrossRef]
- Conversano, R.W.; Reilly, S.W.; Kerber, T.V.; Brooks, J.W.; Goebel, D.M. Development of and Acceptance Test Preparations for the Thruster Component of the Ascendant Sub-kW Transcelestial Electric Propulsion System (ASTRAEUS). In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Conversano, R. Low-Power Magnetically Shielded Hall Thrusters. Ph.D. Thesis, University of California, Los Angeles, CA, USA, 2015. [Google Scholar]
- Mikellides, I.; Katz, I.; Hofer, R.; Goebel, D.M. Magnetic shielding of a laboratory Hall thruster. I. Theory and validation. J. Appl. Phys. 2014, 115, 043303. [Google Scholar] [CrossRef]
- Mazouffre, S.; Bourgeois, G.; Dannenmayer, K.; Lejeune, A. Ionization and acceleration processes in a small, variable channel width, permanent-magnet Hall thruster. J. Phys. D Appl. Phys. 2012, 45, 185203. [Google Scholar] [CrossRef]
- Lev, D.R.; Mikellides, I.G.; Pedrini, D.; Goebel, D.M.; Jorns, B.A.; McDonald, M.S. Recent progress in research and development of hollow cathodes for electric propulsion. Rev. Mod. Plasma Phys. 2019, 3, 6. [Google Scholar] [CrossRef]
- Gold, H.; Rulis, R.J.; Maruna, F.A.J.; Hawersaat, W.H. Description and Operation of Spacecraft in SERT I Ion Thrustor Flight Test; Technical report; National Aeronautics and Space Administration: Washington, DC, USA, 1965.
- Groh, K.H.; Loeb, H.W. State of the art of radio-frequency ion sources for space propulsion. Rev. Sci. Instrum. 1994, 65, 1741–1744. [Google Scholar] [CrossRef]
- Nagano, H.; Kajiwara, K.; Hayakawa, Y. Optimization of the Operating Parameters for a 20 mN Class Ion Thruster. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Nishiyama, K.; Kuninaka, H. Discussion on Performance History and Operations of Hayabusa Ion Engines. Trans. Jpn. Soc. Aeronaut. Space Sci. Aerosp. Technol. Jpn. 2012, 10. [Google Scholar] [CrossRef]
- Tsay, M.; Frongillo, J.; Zwahlen, J.; Paritsky, L. Maturation of Iodine Fueled BIT-3 RF Ion Thruster and RF Neutralizer. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2016. [Google Scholar]
- Cara, D.; Massotti, L.; Cesare, S.; Musso, F.; Castorina, G.; Feili, D.; Lotz, B. Performance Verification of the uNRIT-2.5 Thruster on the Nanobalance Facility. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Wirz, R.; Mueller, J.; Gale, M.; Marrese, C. Miniature Ion Thruster for Precision Formation Flying. In Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004; American Institute of Aeronautics and Astronautics: Fort Lauderdale, FL, USA, 2004. [Google Scholar]
- Samples, S.A.; Wirz, R.E. Development Status of the Miniature Xenon Ion Thruster. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Patterson, M.; Haag, T.; Foster, J.; Young, J.A.; Crofton, M.W. Development Status of High-Thrust Density Electrostatic Engines. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Goebel, D.; Katz, I. Fundamentals of Electric Propulsion: Ion and Hall Thrusters; John Wiley & Sons: Hoboken, NJ, USA, 2008; Volume 1. [Google Scholar]
- Tacon, C. Applications and Principles of Electrospray Spacecraft Propulsion. 2019. Available online: https://www.researchgate.net/publication/333449226 (accessed on 20 April 2020).
- Ziemer, J.; Marrese-Reading, C.; Dunn, C.; Romero-Wolf, A.; Cutler, C.; Javidnia, S.; Le, T.; Li, I.; Franklin, G.; Barela, P.; et al. Colloid Microthruster Flight Performance Results from Space Technology 7 Disturbance Reduction System. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Gates, K. AeroCube-8 Orbital Debris Assessment Report; ODAR; The Aerospace Corporation: El Segundo, CA, USA, 2014. [Google Scholar]
- Krejci, D.; Reissner, A.; Seifert, B.; Jelem, D.; Hörbe, T.; Plesescu, F.; Friedhoff, P.; Lai, S. Demonstration of the IFM Nano FEEP Thrusteri n Low Earth Orbit. In Proceedings of the The 4S Symposium—Small Satellites Systems and Services, Sorrento, Italy, 28 May–1 June 2018; p. 13. [Google Scholar]
- Jorns, B.A.; Gorodetsky, A.; Lasky, I.; Kimber, A.; Dahl, P.; St. Peter, B.; Dressler, R. Uncertainty Quantification of Electrospray Thruster Array Lifetime. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Bethke, G.W.; Crimi, G.; Miller, D. Investigation of Plasma Accelerator (Cyclotron Resonance Propulsion System); Technical Report; NASA: Philadelphia, PA, USA, 1965.
- Micci, M.M.; Bilén, S.G.; Clemens, D.E. History and current status of the microwave electrothermal thruster. In Progress in Propulsion Physics; EDP Sciences: Brussels, Belgium, 2009; pp. 425–438. [Google Scholar]
- Cannat, F.; Lafleur, T.; Jarrige, J.; Chabert, P.; Elias, P.Q.; Packan, D. Optimization of a coaxial electron cyclotron resonance plasma thruster with an analytical model. Phys. Plasmas 2015, 22, 053503. [Google Scholar] [CrossRef]
- Siddiqui, U.; Cretel, C. Updated Performance Measurements and Analysis of the Phase Four RF Thruster. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Arefiev, A.V.; Breizman, B.N. Theoretical components of the VASIMR plasma propulsion concept. Phys. Plasmas 2004, 11, 2942–2949. [Google Scholar] [CrossRef]
- Moses, R.W., Jr.; Gerwin, R.A.; Schoenberg, K.F. Resistive plasma detachment in nozzle based coaxial thrusters. AIP Conf. Proc. 2008, 246, 1293. [Google Scholar]
- Olsen, C.; Ballenger, M.; Carter, M.; Diaz, F.; Giambusso, M.; Glover, T.; Ilin, A.; Squire, J.; Longmier, B.; Bering, E.; et al. Investigation of Plasma Detachment From a Magnetic Nozzle in the Plume of the VX-200 Magnetoplasma Thruster. IEEE Trans. Plasma Sci. 2015, 43, 252–268. [Google Scholar] [CrossRef]
- Wachs, B.; Jorns, B. Technique for Two-Frequency Optimization of an ECR Magnetic Nozzle Thruster. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Guarducci, F.; Coletti, M.; Gabriel, S. Design and Testing of a Micro Pulsed Plasma Thruster for Cubesat Application. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Coletti, M.; Guarducci, F.; Gabriel, S.B. A micro PPT for Cubesat application: Design and preliminary experimental results. Acta Astronaut. 2011, 69, 200–208. [Google Scholar] [CrossRef]
- Krejci, D.; Seifert, B.; Scharlemann, C. Endurance testing of a pulsed plasma thruster for nanosatellites. Acta Astronaut. 2013, 91, 187–193. [Google Scholar] [CrossRef]
- Williams, D. Propulsion Solutions for CubeSats and Applications; BUSEK: Natick, MA, USA, 2012. [Google Scholar]
- Burton, R.L.; Turchi, P.J. Pulsed Plasma Thruster. J. Propuls. Power 1998, 14, 716–735. [Google Scholar] [CrossRef]
- Saylor, W.; France, M. Test and On-Orbit Experiences of FalconSAT-3. In Proceedings of the 4S Symposium—Small Satellites Systems and Services, Rhodes, Greece, 26–30 May 2008. [Google Scholar]
- Bui, V.; Tran, Q.; Lew, J.M.; Selvadurai, S.; Tan, B.; Ling, A.; Yang, L.; Seng, L.; Cheng, T.; Cordova Alarcon, J.R.; et al. Design and Development of AOBA VELOX-IV nanosatellite for future Lunar Horizon Glow mission. In Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, 4–9 August 2018. [Google Scholar]
- Hofer, R.R. Development and Characterization of High-Efficiency, High-Specific Impulse Xenon Hall Thrusters. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2004. [Google Scholar]
- Hofer, R.; Goebel, D.; Mikellides, I.; Katz, I. Design of a Laboratory Hall Thruster with Magnetically Shielded Channel Walls, Phase II: Experiments. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar]
- Hoskins, W.A.; Cassady, R.J.; Morgan, O.; Myers, R.M.; Wilson, F.; King, D.Q.; DeGrys, K. 30 Years of Electric Propulsion Flight Experience at Aerojet Rocketdyne. In Proceedings of the 33rd International Electric Propulsion Conference, Washington, DC, USA, 7–10 October 2013. [Google Scholar]
- Snyder, J.S.; Hofer, R.R. Throttled Performance of the SPT-140 Hall Thruster. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Hofer, R.R.; Polk, J.E.; Sekerak, M.J.; Mikellides, I.G.; Kamhawi, H.; Sarver-Verhey, T.R.; Herman, D.A.; Williams, G. The 12.5 kW Hall Effect Rocket with Magnetic Shielding (HERMeS) for the Asteroid Redirect Robotic Mission. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar]
- Zurbach, S.J.; Cornu, N.; Lasgorceix, P. Performance Evaluation of a 20 kW Hall Effect Thruster. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Piragino, A.; Ferrato, E.; Faraji, F.; Reza, M.; Kitaeva, A.; Pedrini, D.; Andrenucci, M.; Andreussi, T. SITAEL’s Magnetically Shielded 20 kW Hall Thruster Tests. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Hall, S.J. Characterization of a 100-kW Class Nested-Channel Hall Thruster. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2017. [Google Scholar]
- Lev, D.; Myers, R.; Lemmer, K.; Kolbeck, J.; Keidar, M.; Koizumi, H.; Liang, H.; Yu, D.; Schönherr, T.; Gonzalez, J.; et al. The Technological and Commercial Expansion of Electric Propulsion in the Past 24 Years. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Koppel, C.; Estublier, D. The Smart-1 Electric Propulsion Subsystem. In Proceedings of the 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, AL, USA, 20–23 July 2003. [Google Scholar]
- Oh, D.Y.; Collins, S.; Goebel, D.; Hart, B.; Lantoine, G.; Snyder, S.; Whiffen, G.; Elkins-Tanton, L.; Lord, P.; Pirkl, Z.; et al. Development of the Psyche Mission for NASA’s Discovery Program. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Randolph, T.; Kim, V.; Kaufman, H.; Kozubsky, K.; Zhurin, V.; Day, M. Facility effects on stationary plasma thruster testing. In Proceedings of the 23rd AIAA/AIDAA/DGLR/JSASS International Electric Propulsion Conference, Seattle, WA, USA, 13–16 September 1993. [Google Scholar]
- Low Earth Orbit Spacecraft Charging Design Handbook; Technical Report NASA-HDBK-4006; NASA: Washington, DC, USA, 2018.
- Diamant, K.; Spektor, R.; Beiting, E.; Young, J.; Curtiss, T. The Effects of Background Pressure on Hall Thruster Operation. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar]
- Walker, M.L.R. Effects of Facility Backpressure on the Performance and Plume of a Hall Thruster. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2005. [Google Scholar]
- Frieman, J.D.; Walker, J.A.; Walker, M.L.R.; Khayms, V.; King, D.Q. Electrical Facility Effects on Hall Thruster Cathode Coupling: Performance and Plume Properties. J. Propuls. Power 2016, 32, 251–264. [Google Scholar] [CrossRef]
- Choueiri, E.Y. Plasma oscillations in Hall thrusters. Phys. Plasmas 2001, 8, 1411–1426. [Google Scholar] [CrossRef]
- Tilinin, G. High-frequency plasma waves in a Hall accelerator with an extended acceleration zone. Sov. Phys. Tech. Phys. 1977, 22, 974–978. [Google Scholar]
- Litvak, A.A.; Fisch, N.J. Resistive instabilities in Hall current plasma discharge. Phys. Plasmas 2001, 8, 648–651. [Google Scholar] [CrossRef]
- Barral, S.; Ahedo, E. Low-frequency model of breathing oscillations in Hall discharges. Phys. Rev. E 2009, 79. [Google Scholar] [CrossRef]
- Romadanov, I.; Smolyakov, A.; Raitses, Y.; Kaganovich, I.; Tian, T.; Ryzhkov, S. Structure of nonlocal gradient-drift instabilities in Hall ExB discharges. Phys. Plasmas 2016, 23, 122111. [Google Scholar] [CrossRef]
- Janhunen, S.; Smolyakov, A.; Chapurin, O.; Sydorenko, D.; Kaganovich, I.; Raitses, Y. Nonlinear structures and anomalous transport in partially magnetized ExB plasmas. Phys. Plasmas 2018, 25, 011608. [Google Scholar] [CrossRef]
- Fife, J.; Martinez-Sanchez, M.; Szabo, J. A numerical study of low-frequency discharge oscillations in Hall thrusters. In Proceedings of the 33rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Seattle, WA, USA, 6–9 July 1997. [Google Scholar]
- Adam, J.C.; Héron, A.; Laval, G. Study of stationary plasma thrusters using two-dimensional fully kinetic simulations. Phys. Plasmas 2004, 11, 295–305. [Google Scholar] [CrossRef]
- Hara, K.; Sekerak, M.J.; Boyd, I.D.; Gallimore, A.D. Mode transition of a Hall thruster discharge plasma. J. Appl. Phys. 2014, 115. [Google Scholar] [CrossRef]
- Powis, A.T.; Carlsson, J.A.; Kaganovich, I.D.; Raitses, Y.; Smolyakov, A. Scaling of spoke rotation frequency within a Penning discharge. Phys. Plasmas 2018, 25, 072110. [Google Scholar] [CrossRef]
- Hara, K.; Mikellides, I.G. Characterization of low frequency ionization oscillations in Hall thrusters using a one-dimensional fluid model. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Dankanich, J.W.; Brophy, J.R.; Polk, J.E. Lifetime Qualification Standard for Electric Thrusters. In Proceedings of the 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Denver, CO, USA, 2–5 August 2009. [Google Scholar]
- Chien, K.R.; Hart, S.L.; Tighe, W.G.; De Pano, M.K.; Bond, T.A.; Spears, R. L-3 Communications ETI Electric Propulsion Overview. In Proceedings of the 29th International Electric Propulsion Conference, Princeton, NJ, USA, 31 October–4 November 2005. [Google Scholar]
- Brophy, J. The Dawn Ion Propulsion System. Space Sci. Rev. 2011, 163, 251–261. [Google Scholar] [CrossRef]
- Kuninaka, H. Microwave Discharge Ion Engines onboard Hayabusa Asteroid Explorer. AIP Conf. Proc. 2008, 997, 572–581. [Google Scholar]
- Randall, P.; Lewis, R.; Clark, S.; Chan, K.; Gray, H.; Steiger, C. BepiColombo—MEPS Commissioning Activities and T6 Ion Thruster Performance During Early Missions Operations. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Polk, J.; Anderson, J.; Brophy, J.; Rawlin, V.; Patterson, M.; Sovey, J.; Hamley, J. An overview of the results from an 8200 hour wear test of the NSTAR ion thruster. In Proceedings of the 35th Joint Propulsion Conference and Exhibit, Los Angeles, CA, USA, 20–24 June 1999. [Google Scholar]
- Shastry, R.; Herman, D.A.; Soulas, G.C.; Patterson, M.J. End-of-test Performance and Wear Characterization of NASA’s Evolutionary Xenon Thruster (NEXT) Long-Duration Test. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Nakano, M. Three-dimensional simulations of grid erosion in ion engines. Vacuum 2008, 83, 82–85. [Google Scholar] [CrossRef]
- Herman, D.; Gallimore, A. Discharge Chamber Plasma Potential Mapping of a 40-cm NEXT-type Ion Engine. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Tucson, AZ, USA, 10–13 July 2005. [Google Scholar]
- Herman, D.; Soulas, G.; Patterson, M. Status of the NEXT Long-Duration Test After 23,300 Hours of Operation. In Proceedings of the 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Denver, CO, USA, 2–5 August 2009. [Google Scholar]
- Mikellides, I.G.; Katz, I.; Goebel, D.M.; Jameson, K.K.; Polk, J.E. Wear Mechanisms in Electron Sources for Ion Propulsion, II: Discharge Hollow Cathode. J. Propuls. Power 2008, 24, 866–879. [Google Scholar] [CrossRef]
- Mikellides, I.G.; Katz, I. Wear Mechanisms in Electron Sources for Ion Propulsion, I: Neutralizer Hollow Cathode. J. Propuls. Power 2008, 24, 855–865. [Google Scholar] [CrossRef]
- Kornfeld, G.D.; Koch, N.; Harmann, H.P. Physics and Evolution of HEMP-Thrusters. In Proceedings of the 30th International Electric Propulsion Conference, Florence, Italy, 17–20 September 2007. [Google Scholar]
- Lazurenko, A.; Genovese, A.; Stalzer, H.; Heidemann, R.; Weis, S.; Holtmann, P.; Wolf, T.; Puttmann, N. Progress in Lifetime Test of HEMP-T Electric Propulsion System. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Liu, H.; Zeng, M.; Yu, D.; Huang, H. Study of channel length effect on low power HEMP Thruster. Vacuum 2019, 163, 328–337. [Google Scholar] [CrossRef]
- Dailey, C.; Lovberg, R. Large diameter inductive plasma thrusters. In Proceedings of the 14th International Electric Propulsion Conference, Princeton, NJ, USA, 30 October–1 November 1979. [Google Scholar]
- Lovberg, R.H.; Dailey, C.L. Large Inductive Thruster Performance Measurement. AIAA J. 1982, 20, 971–977. [Google Scholar] [CrossRef]
- Dailey, C.; Lovberg, R.H. The PIT MkV Pulsed Inductive Thruster; Contractor Report 191155; NASA: Washington, DC, USA; Lewis Research Center: Cleveland, OH, USA, 1993.
- Polzin, K.; Rose, M.; Miller, R.; Best, S.; Owens, T.; Dankanich, J. Design of a Low-Energy FARAD Thruster. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Cincinnati, OH, USA, 8–11 July 2007. [Google Scholar]
- Polzin, K.A.; Martin, A.K.; Eskridge, R.H.; Kimberlin, A.C.; Addona, B.M.; Devineni, A.P.; Dugal-Whitehead, N.R.; Hallock, A.K. Summary of the 2012 Inductive Pulsed Plasma Thruster Development and Testing Program; Technical Report NASA/TP-2013-217488; Marshal Space Flight Center: Huntsville, AL, USA, 2013.
- Blevin, H.A.; Thonemann, P.C. Plasma Confinement Using an Alternating Magnetic Field; Culham Lab.: Abingdon, Berks, UK, 1962. [Google Scholar]
- Kirtley, D.; Gallimore, D.A.D.; Haas, D.J.; Reilly, M. High Density Magnetized Toroid Formation and Translation within XOCOT: An Annular Field Reversed Configuration Plasma Concept. In Proceedings of the 30th International Electric Propulsion Conference, Florence, Italy, 17–20 September 2007. [Google Scholar]
- Hill, C.S. Preliminary Results on an Annular Field ReversedConfiguration Translation Experiment. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Weber, T.E.; Slough, J.T.; Kirtley, D. The electrodeless Lorentz force (ELF) thruster experimental facility. Rev. Sci. Instrum. 2012, 83, 113509. [Google Scholar] [CrossRef] [PubMed]
- Niemala, C.S.; King, L.B. Numerical Optimization of an Annular Field ReversedConfiguration Translation Experiment. In Proceedings of the 31st International Electric Propulsion Conference, Ann Arbor, MI, USA, 20–24 September 2009. [Google Scholar]
- Woods, J.M.; Jorns, B.A.; Gallimore, A.D. Circuit Modeling of Rotating Magnetic Field Field-reversed Configuration Thrusters. In Proceedings of the 54th AIAA/SAE/ASEE Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Polzin, K.A. Scaling and Systems Considerations in Pulsed Inductive Thrusters. In Proceedings of the 30th International Electric Propulsion Conference, Florence, Italy, 17–20 September 2007. [Google Scholar]
- Hofer, R.R.; Randolph, T.M. Mass and Cost Model for Selecting Thruster Size in Electric Propulsion Systems. J. Propuls. Power 2012, 29, 166–177. [Google Scholar] [CrossRef]
- Dankanich, J.; Vondra, B.; Ilin, A. Fast Transits to Mars Using Electric Propulsion. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010. [Google Scholar]
- Spores, R.; Monheiser, J.; Dempsey, B.P.; Wade, D.; Creel, K.; Jacobson, D.; Drummond, G. A Solar Electric Propulsion Cargo Vehicle To Support NASA Lunar Exploration Program. In Proceedings of the 29th International Electric Propulsion Conference, Princeton, NJ, USA, 31 October–4 November 2005. [Google Scholar]
- Beal, B.; Gallimore, A.; Hargus, W. The Effects of Cathode Configuration on Hall Thruster Cluster Plume Properties. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Tucson, AZ, USA, 10–13 July 2005. [Google Scholar]
- Beal, B.E.; Gallimore, A.D.; Haas, J.M.; Hargus, W.A. Plasma Properties in the Plume of a Hall Thruster Cluster. J. Propuls. Power 2004, 20, 985–991. [Google Scholar] [CrossRef][Green Version]
- Jackson, J.; Cassady, J.; Allen, M.; Myers, R.; Tofil, T.; Herman, D.; Pencil, E. Development Of High Power Hall Thruster Systems To Enable The NASA Exploration Vision; Space Propulsion 2018; NASA: Washington, DC, USA, 2018.
- Liang, R. The Combination of Two Concentric Discharge Channels into a Nested Hall-Effect Thruster. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2013. [Google Scholar]
- Cusson, S.; Jorns, B.; Gallimore, A. Impact of Neutral Density on the Magnetic Shielding of Hall Thrusters. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Hall, S.J.; Jorns, B.; Gallimore, A.; Hofer, R.R. Expanded Thruster Mass Model Incorporating Nested Hall Thrusters. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar]
- Su, L.L.; Hall, S.J.; Cusson, S.E.; Jorns, B.A. Model for the Increase in Thruster Efficiency from Cross-Channel Coupling in Nested Hall Thrusters. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Nakanishi, S.; Pawlik, E.V. Experimental investigation of a 1.5-m-diam Kaufman thruster. J. Spacecr. Rocket. 1968, 5, 801–807. [Google Scholar] [CrossRef]
- Brophy, J.R. NASA’s Deep Space 1 ion engine (plenary). Rev. Sci. Instrum. 2002, 73, 1071–1078. [Google Scholar] [CrossRef]
- Schmidt, G.; Jacobson, D.; Patterson, M.; Ganapathi, G.; Brophy, J.; Hofer, R. Electric Propulsion Research and Development at NASA; Space Propulsion 2018; NASA: Washington, DC, USA, 2018.
- Foster, J.E.; Haag, T.; Kamhawi, H.; Patterson, M.; Malone, S.; Elliot, F.; Williams, G.; Sovey, J.; Carpenter, C. The High Power Electric Propulsion (HiPEP) Ion Thruster. In Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conferenceand Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar]
- Sovey, J.; Mantenieks, M. Performance and lifetime assessment of magnetoplasmadynamic arc thruster technology. J. Propuls. Power 1991, 7. [Google Scholar] [CrossRef]
- Herdrich, G.; Bauder, U.; Bock, D.; Eichhorn, C.; Haag, D.; Lau, M.; Schönherr, T.; Stindl, T.; Fertig, M.; Löhle, S.; et al. Activities in Electric Propulsion Development at IRS. Trans. Jpn. Soc. Aeronaut. Space Sci. Space Technol. Jpn. 2009, 7. [Google Scholar] [CrossRef]
- Toki, K.; Shimizu, Y.; Kuriki, K. Application of MPD thruster systems to interplanetary missions. J. Propuls. Power 1986, 2, 508–512. [Google Scholar] [CrossRef]
- Malliaris, A.C.; John, R.R.; Garrison, R.L.; Libby, D.R. Performance of Quasi-Steady MPD Thrusters at High Powers. AIAA J. 1972, 10, 121–122. [Google Scholar] [CrossRef]
- Gorshkov, O.; Shutov, V.; Kozubsky, K.; Ostrovsky, V.; Obukhov, V. Development of High Power Magnetoplasmadynamic Thrusters in the USSR. In Proceedings of the 30th International Electric Propulsion Conference, Florence, Italy, 17–20 September 2007. [Google Scholar]
- Takegahara, H.; Kuninaka, H.; Funaki, I.; Ando, A.; Koizumi, H.; Schönherr, T.; Shinohara, S.; Tanikawa, T.; Nakano, M.; Nakayama, Y.; et al. Overview of Electric Propulsion Research Activities in Japan. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2015. [Google Scholar]
- Boxberger, A.; Behnke, A.; Herdrich, G. Current Advances in Optimization of Operative Regimes of Steady State Applied Field MPD Thrusters. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- LaPointe, M.; Strzempkowski, E.; Pencil, E. High Power MPD Thruster Performance Measurements. In Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar]
- Herdrich, G.; Binder, T.; Boxberger, A.; Chan, Y.A.; Ehresmann, M.; Harmansa, N.; Montag, C.; Romano, F.; Skalden, J.; Fasoulas, S.; et al. Research and Development on Electric and Advanced Propulsion at IRS. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Lev, D.R.; Choueiri, E.Y. Scaling of Efficiency with Applied Magnetic Field in Magnetoplasmadynamic Thrusters. J. Propuls. Power 2012, 28, 609–616. [Google Scholar] [CrossRef]
- Dankanich, J.; Lozano, P. Dual Mode Green Propulsion for Revolutionary Performance Gains with Minimal Recurring Investments; Planetary Science Vision 2050 Workshop: Washington, DC, USA, 2017. [Google Scholar]
- Díaz, F.R. The Vasimr Rocket. Sci. Am. 2000, 283, 90–97. [Google Scholar] [CrossRef]
- Squire, J.P.; Carter, M.; Diaz, F.C.; Corrigan, A.; Dean, L.; Farrias, J.; Giambusso, M.; McCaskill, G.; Yao, T. Run-time Accumulation Testing of the 100 kW VASIMR VX-200SS Device. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Sercel, J.C. An Experimental and Theoretical Study of the ECR Plasma Engine. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 1993. [Google Scholar]
- Cassady, L.; Longmier, B.; Olsen, C.; Ballenger, M.; McCaskill, G.; Illin, A.; Carter, M.; Glover, T.; Squire, J.; Chang Diaz, F.; et al. VASIMR Performance Results. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference& Exhibit, Nashville, TN, USA, 25–28 July 2010. [Google Scholar]
- Corrigan, A.; Carter, M.; Squire, J.; Chang Diaz, F.; Dean, L.; Giambusso, M.; McCaskill, G.; Farrias, J.; Yao, T. Enhancing VASIMR with Maturing Technologies. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Robbins, W.; Finger, H. An historical perspective of the NERVA nuclear rocket engine technology program. In Proceedings of the Conference on Advanced SEI Technologies, Cleveland, OH, USA, 4–6 September 1991. [Google Scholar]
- Hofer, R.R.; Anderson, J.R. Finite Pressure Effects in Magnetically Shielded Hall Thrusters. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- de Grys, K.; Tilley, D.; Aadland, R. BPT Hall thruster plume characteristics. In Proceedings of the 35th Joint Propulsion Conference and Exhibit, Los Angeles, CA, USA, 20–24 June 1999. [Google Scholar]
- Hofer, R.; Peterson, P.; Gallimore, A. Characterizing Vacuum Facility Backpressure Effects on the Performance of a Hall Thruster. In Proceedings of the 27th International Electric Propulsion Conference, Pasadena, CA, USA, 15–19 October 2001; p. 10. [Google Scholar]
- Brown, D.L.; Gallimore, A.D. Evaluation of Facility Effects on Ion Migration in a Hall Thruster Plume. J. Propuls. Power 2011, 27, 573–585. [Google Scholar] [CrossRef]
- Huang, W.; Kamhawi, H.; Lobbia, R.B.; Brown, D.L. Effect of Background Pressure on the Plasma Oscillation Characteristics of the HiVHAc Hall Thruster. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Diamant, K.D.; Liang, R.; Corey, R.L. The Effect of Background Pressure on SPT-100 Hall Thruster Performance. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Huang, W.; Kamhawi, H.; Haag, T. Plasma Oscillation Characterization of NASA’s HERMeS Hall Thruster via High Speed Imaging. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar]
- Tighe, W.G.; Spektor, R.; Diamant, K.D.; Kamhawi, H. Effects of Background Pressure on the NASA 173M Hall Current Thruster Performance. In Proceedings of the 34th International Electric Propulsion Conference, Kobe, Japan, 7–10 July 2015. [Google Scholar]
- Cusson, S.; Hofer, R.; Lobbia, R.; Jorns, B.; Gallimore, A. Performance of the H9 Magnetically Shielded Hall Thrusters. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Byrne, M.P.; Jorns, B.A. Data-driven Models for the Effects of BackgroundPressure on the Operation of Hall Thrusters. In Proceedings of the 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Mikellides, I.G.; Ortega, A.L.; Chaplin, V.H.; Snyder, J.S. Facility pressure effects on a Hall thruster with an external cathode, II: Theoretical model of the thrust and the significance of azimuthal asymmetries in the cathode plasma. Plasma Sources Sci. Technol. 2020, 29, 035010. [Google Scholar] [CrossRef]
- Van Noord, J.; Herman, D. Application of the NEXT Ion Thruster Lifetime Assessment to Thruster Throttling. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Hartford, CT, USA, 21–23 July 2008. [Google Scholar]
- Wachs, B.; Jorns, B. Real-Time Optimization of an Electron Cyclotron Resonance Thruster. In Proceedings of the 2020 AIAA Propulsion and Energy Forum, New Orleans, LA, USA, 24–26 August 2020. [Google Scholar]
- Snyder, J.; Brophy, J.; Hofer, R.; Goebel, D.; Katz, I. Experimental Investigation of a Direct-Drive Hall Thruster and Solar Array System at Power Levels up to 10 kW. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar]
- Brophy, J.R.; Polk, J.E.; Goebel, D.M. Development of a 50,000-s, Lithium-fueled, Gridded Ion Thruster. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Massey, D.; King, L.; Makela, J. Development of a Direct Evaporation Bismuth Hall Thruster. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Hartford, CT, USA, 21–23 July 2008. [Google Scholar]
- Kamhawi, H.; Haag, T.; Benavides, G.; Hickman, T.; Smith, T.; Williams, G.; Myers, J.L.; Polzin, K.A.; Dankanich, J.; Byrne, L.; et al. Overview of Iodine Propellant Hall Thruster Development Activities at NASA Glenn Research Center. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar]
- Sovey, J.S.; Rawlin, V.K.; Patterson, M.J. Ion Propulsion Development Projects in U.S.: Space Electric Rocket Test I to Deep Space 1. J. Propuls. Power 2001, 17, 517–526. [Google Scholar] [CrossRef]
- Gibson, M.A.; Oleson, S.R.; Poston, D.I.; McClure, P. NASA’s Kilopower reactor development and the path to higher power missions. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–14. [Google Scholar]
- Stella, P.M.; DiStefano, S.; Rayman, M.D.; Ulloa-Severino, A. Early mission power assessment of the Dawn solar array. In Proceedings of the 2009 34th IEEE Photovoltaic Specialists Conference (PVSC), Philadelphia, PA, USA, 7–12 June 2009; pp. 001617–001621. [Google Scholar]
- Goddard, R.H.; Robert, H. Goddard: An autobiography. Astronautics 1959, 4, 24. [Google Scholar]
- Nishiyama, K.; Hosoda, S.; Ueno, K.; Kuninaka, H. The Ion Engine System for Hayabusa2. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]




















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dale, E.; Jorns, B.; Gallimore, A. Future Directions for Electric Propulsion Research. Aerospace 2020, 7, 120. https://doi.org/10.3390/aerospace7090120
Dale E, Jorns B, Gallimore A. Future Directions for Electric Propulsion Research. Aerospace. 2020; 7(9):120. https://doi.org/10.3390/aerospace7090120
Chicago/Turabian StyleDale, Ethan, Benjamin Jorns, and Alec Gallimore. 2020. "Future Directions for Electric Propulsion Research" Aerospace 7, no. 9: 120. https://doi.org/10.3390/aerospace7090120
APA StyleDale, E., Jorns, B., & Gallimore, A. (2020). Future Directions for Electric Propulsion Research. Aerospace, 7(9), 120. https://doi.org/10.3390/aerospace7090120