Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems


Abstract
1. Introduction
2. Objectives, Needs and High-Level Requirements
- OBJ1: To design and build a prototype CubeSat Test Platform (CTP) based on COTS technology suitable for hosting and handling miniaturized electric propulsion systems
- OBJ2: To define a procedure for testing the integrated CTP/electric propulsion system in a relevant environment (@ESA/ESTEC EPL)
3. Design
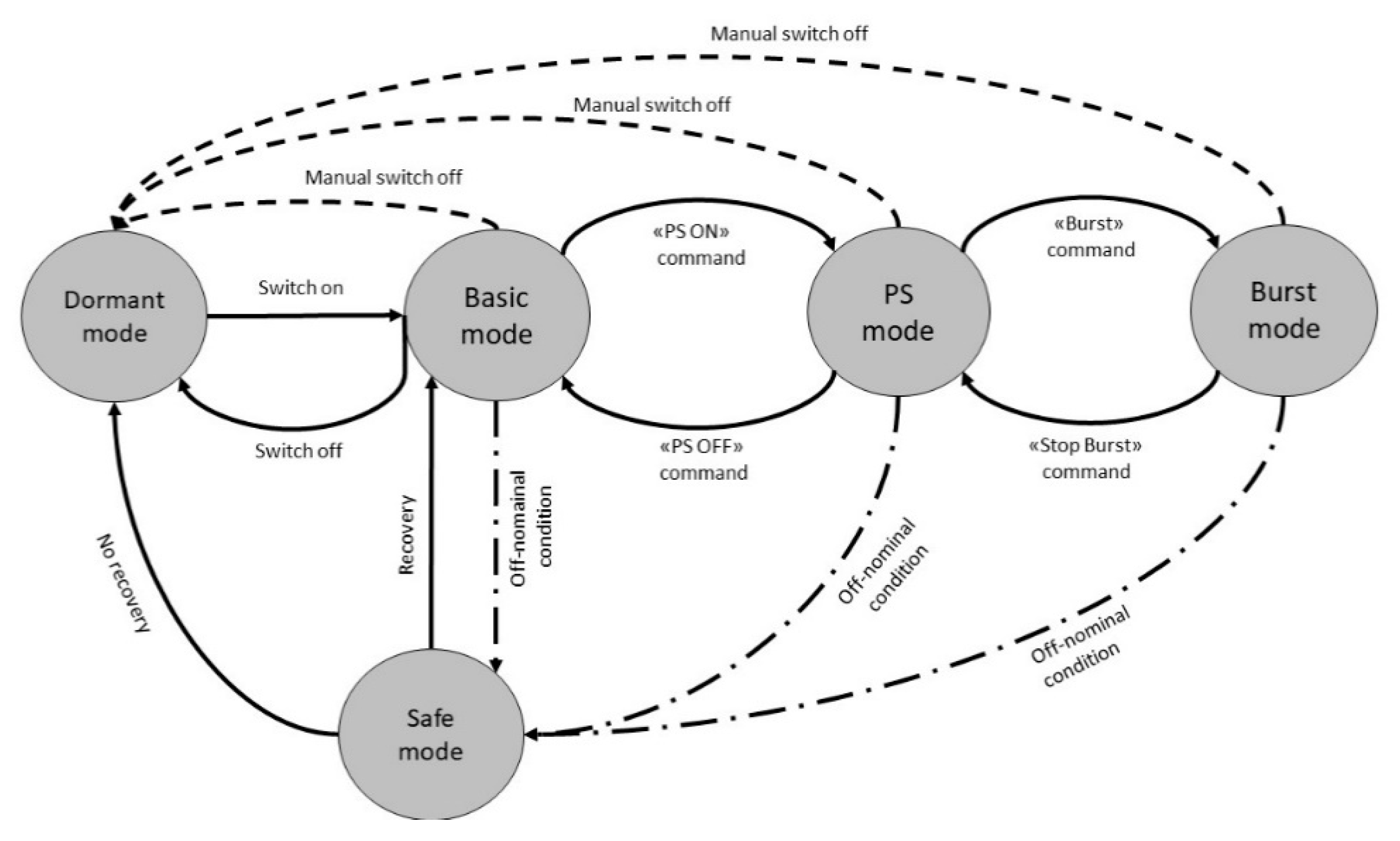
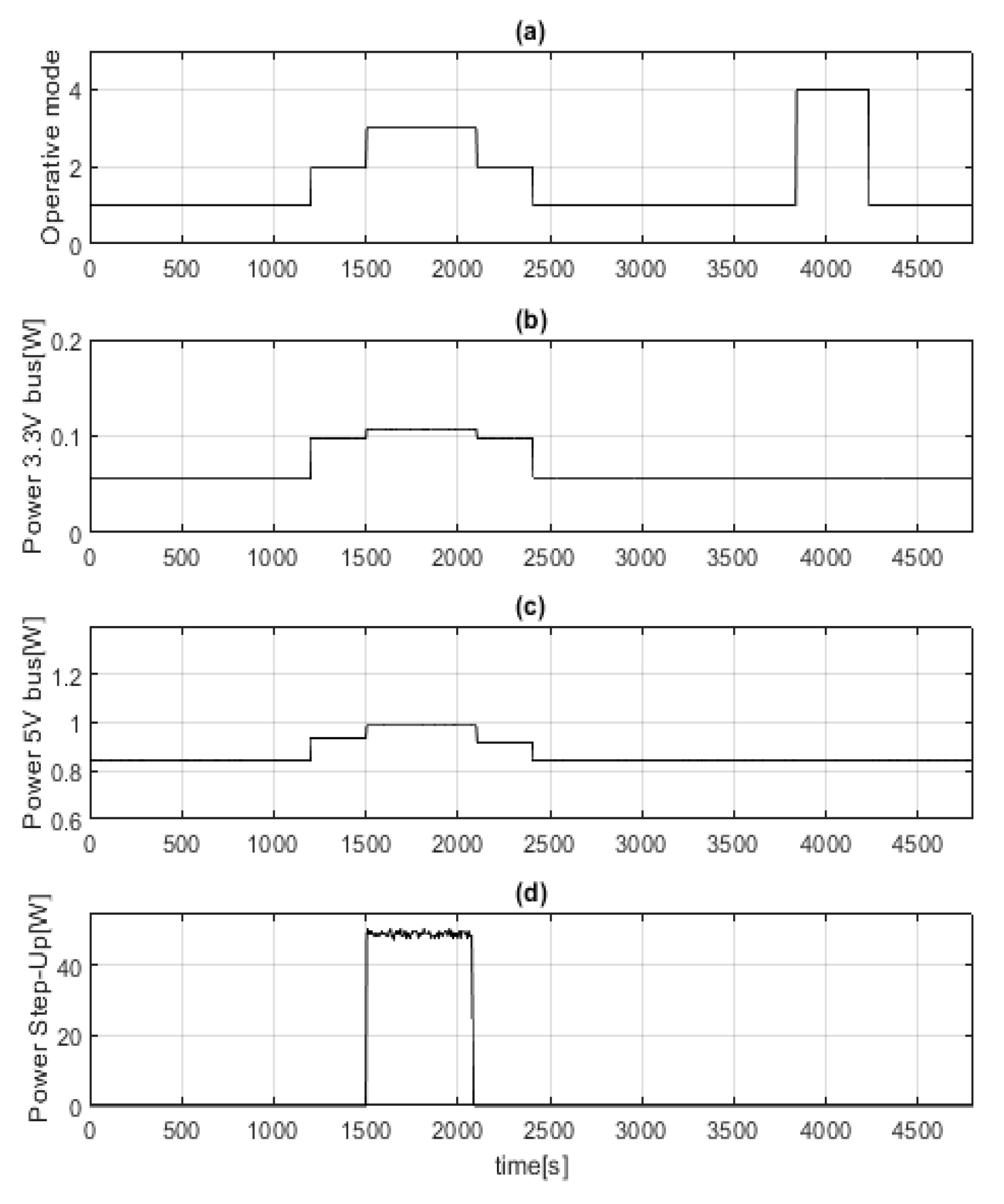
Operative Modes
- Dormant (OM#0): CTP subsystems are switched-off
- Basic mode (OM#1): CTP avionics is active, EP system is off
- PS mode (OM#2): CTP avionics is active, EP system is active, but thruster is off
- Burst mode (OM#3): CTP avionics and the EP system are active, and thruster is activated
- Safe mode (OM#4): CTP avionics is active and recovery operations are performed, while EP system is completely switch-off
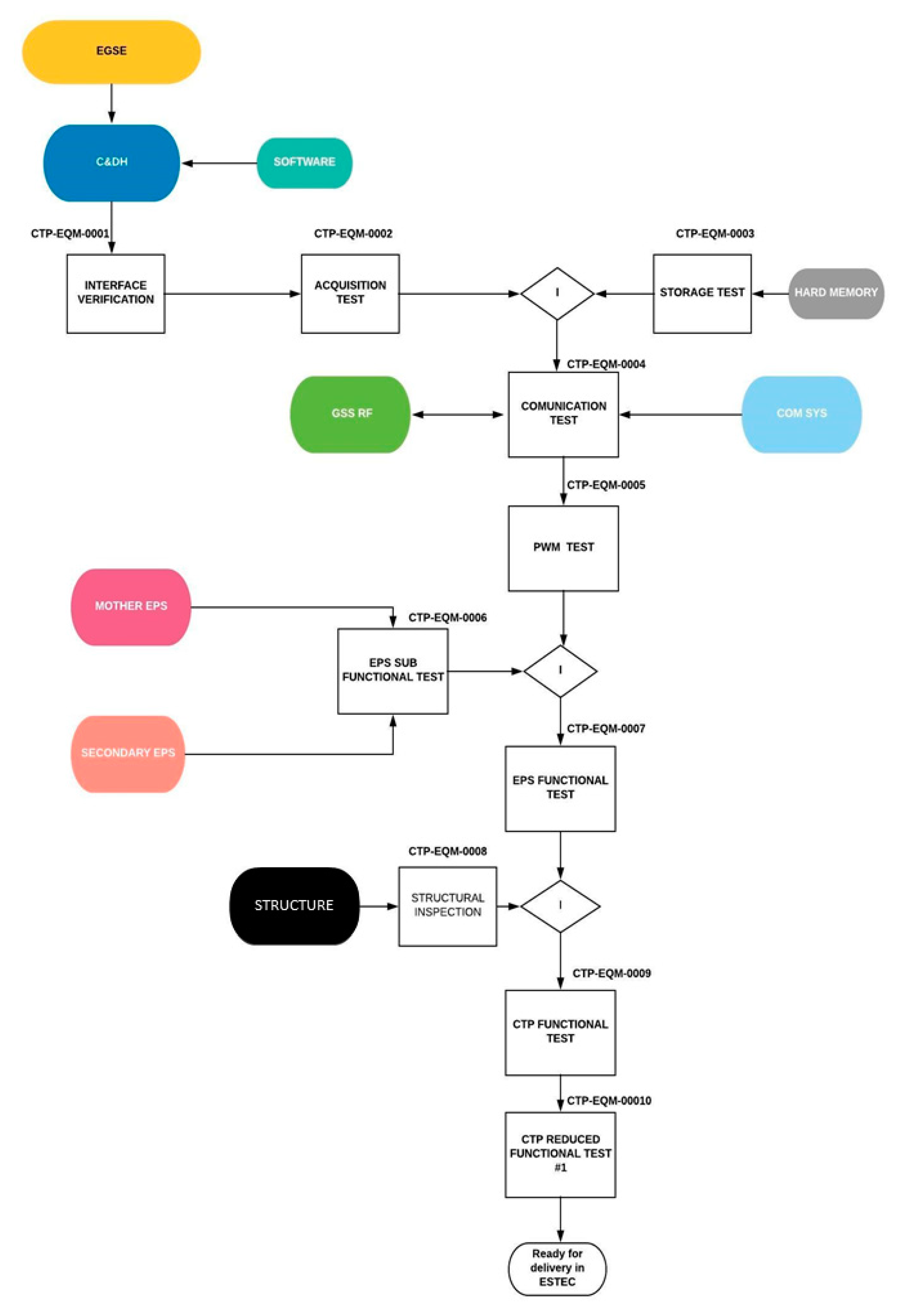
4. Assembly Integration and Verification
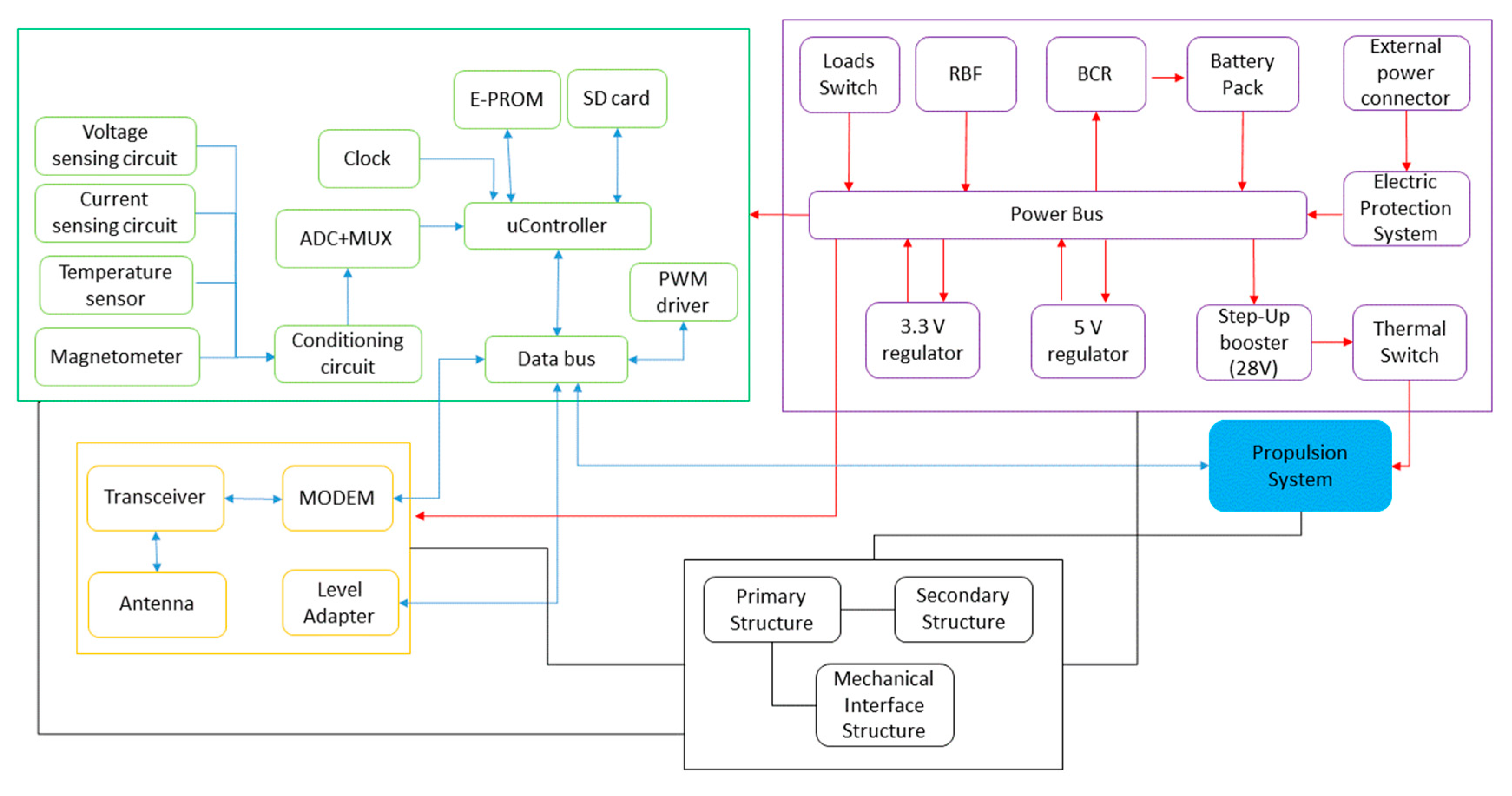
- Interface Test. The test has to verify all the interfaces and protocols. The interfaces are UART (three communication lines set with RS232 protocol–one is the hardline, the second connects the CDH and the COMSYS and the third is optional towards the EP system), SPI bus to communicate with the data acquisition circuits, and I2C bus towards the magnetometer.
- Acquisition test. This test aims at the validation of the software units and hardware circuits taking care of acquiring data from sensors and setting-up the data exchange with EP system. A 16-channel ADC is mounted on the CDH for the acquisition of temperatures and magnetic field.
- After the integration of the SD-card with the CDH board, the Storage test aims at verifying the capability of storing data in the non-volatile memories (both SD-card and an EPROM).
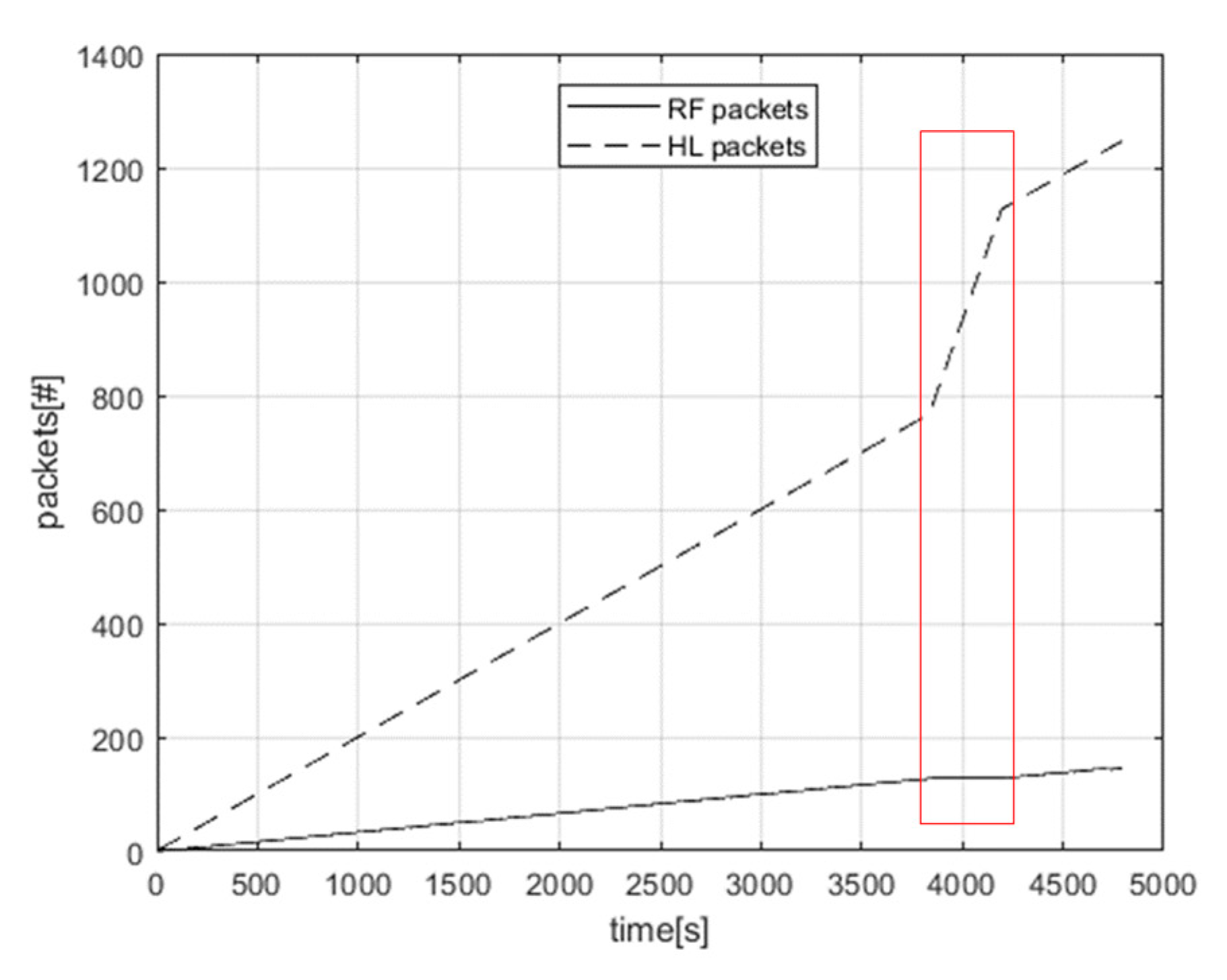
- Communication test. This test deals with the validation of the software units and hardware for communication via hardline and RF link. The COMSYS board is integrated with the CDH and the GSS guarantees the exchange of data and commands. Moreover, the consistency of the packets with the CRC (Cyclical Redundancy Code) is to be confirmed.
- PWM test. This test aims at confirming the CDH capability of communicating with EPS and setting-up the voltage on the power output towards the EP system through the Step-up circuit. The CDH shall demonstrate the capability to control the voltage according to the request of the EP system under test.
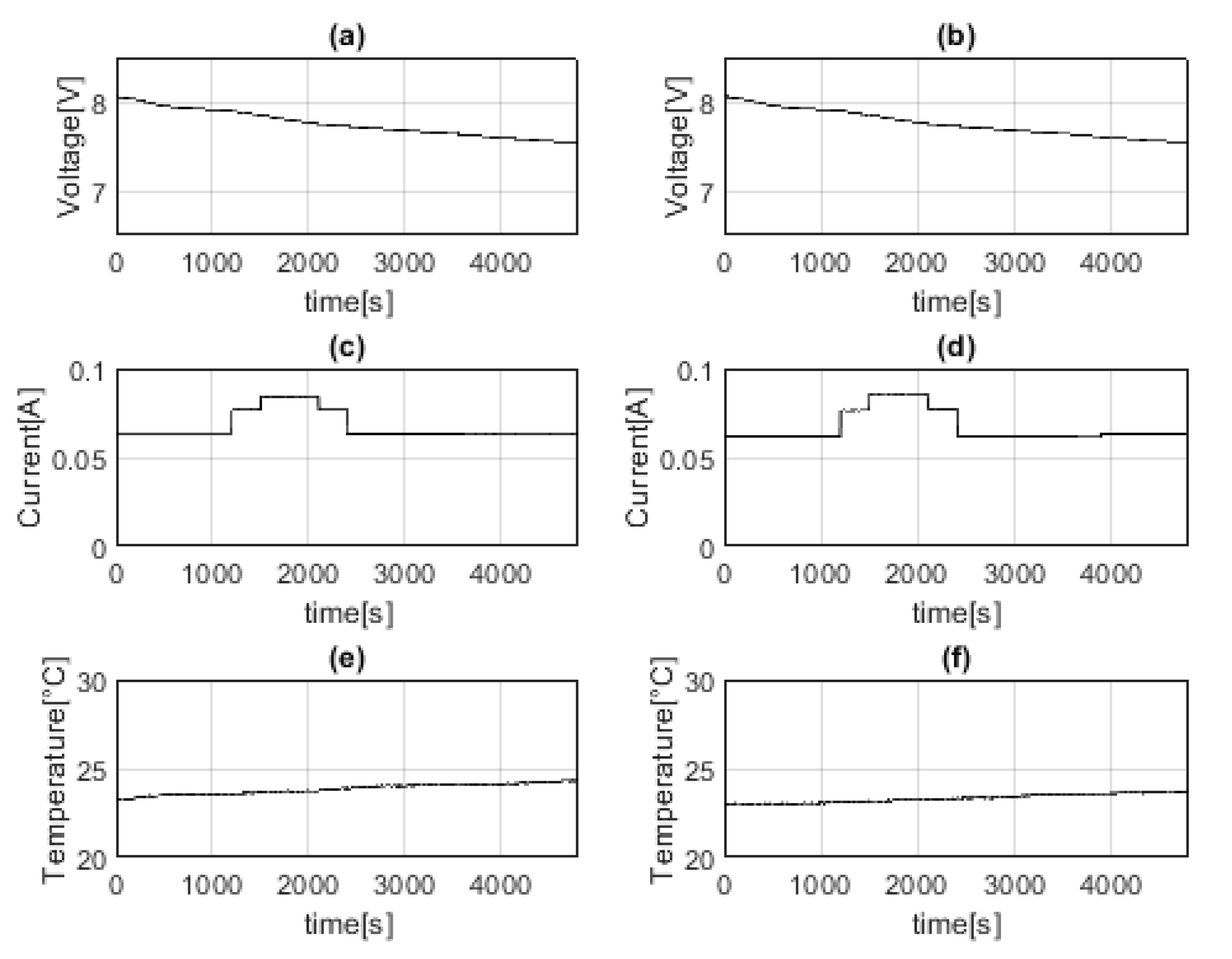
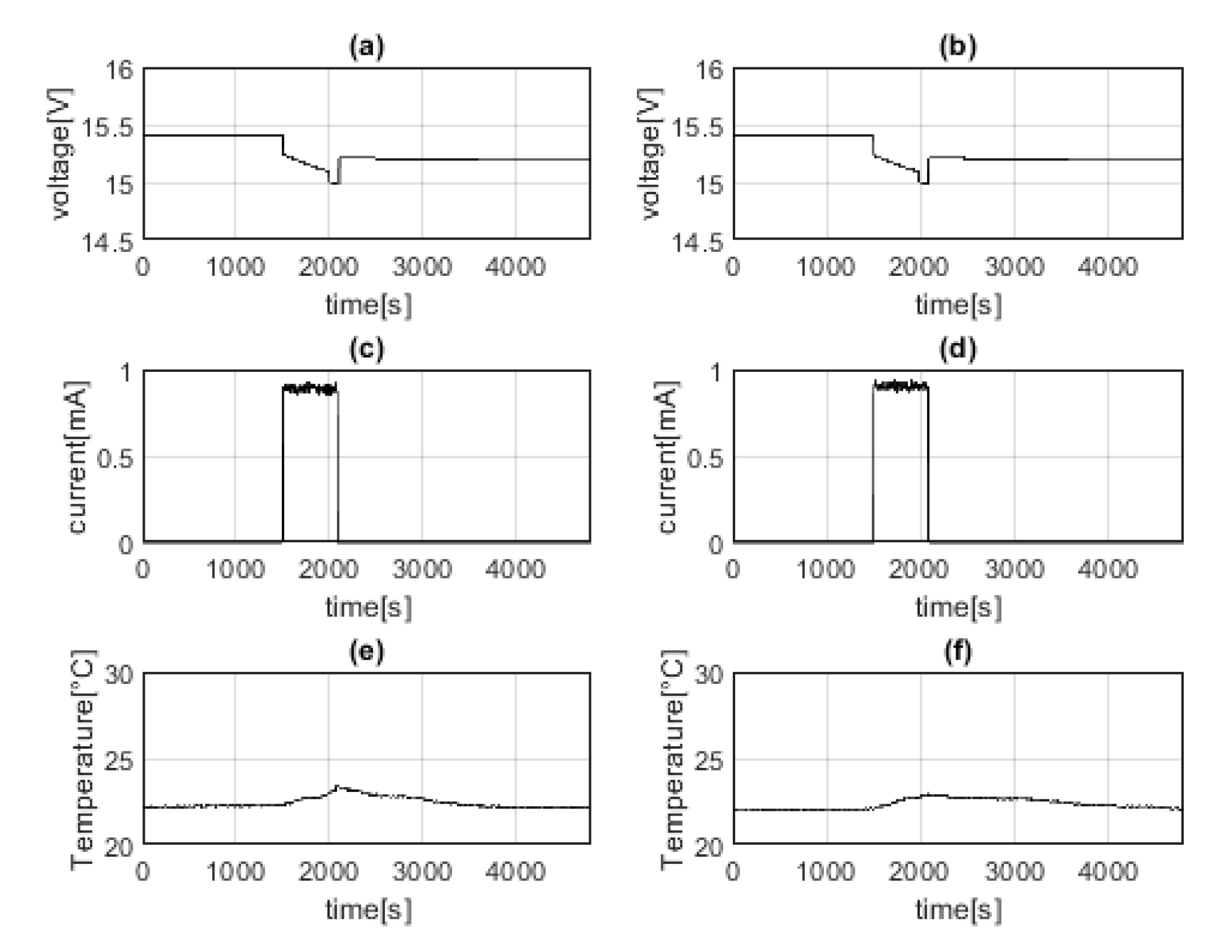
- EPS test. This test aims at verifying the capabilities of the EPS stand-alone (i.e., without any other subsystem). The motherboard EPS is tested to demonstrate the ability of regulation of the bus voltages (3.3 V and 5 V), and control of the discharging and the recharging of the PS battery packs. The same capability is expected for the EPS daughter (EPS.D): regulation of the voltage outputs, and control of the discharging and the recharging of the AV packs. Then, EPS-M and EPS.D are integrated with the CDH and COM SYS sub-assembly completing integration of the avionics box.
- The Structure verification aims at checking the mechanical properties of structural elements. The primary structure is inspected and then the mechanical properties confirmed, taking care of the compliance with the CDS.
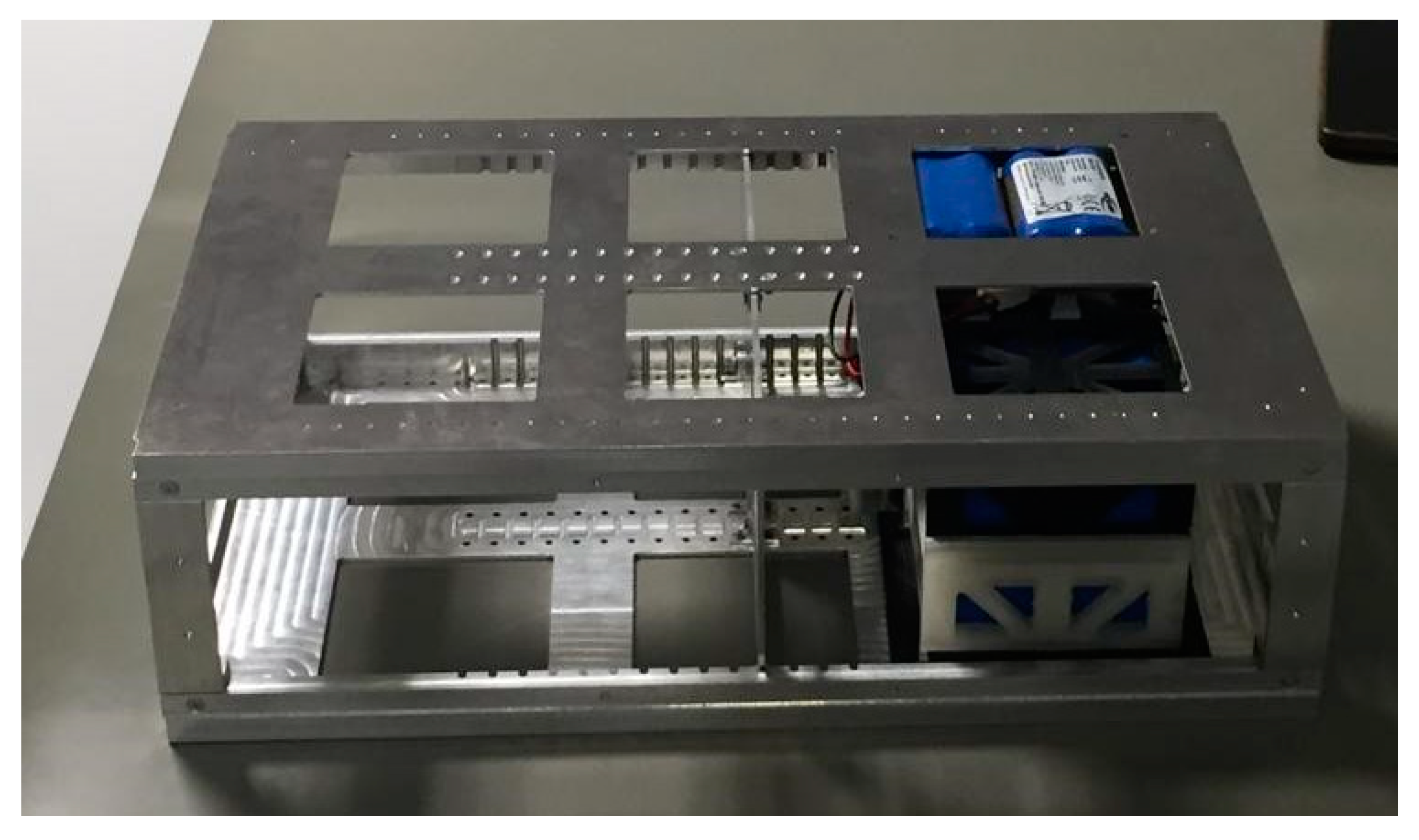
- Full functionality test. The functions that CTP shall accomplish to achieve the goals of the program are tested in a single, global test. They include not only the confirmation of the already tested functionalities when EQM is completely assembled but also the verification at system level such as the capability to operate in the different operative modes and during transitions from one mode to another. This test was carried before the integration of any EP system in the CTP. However, the electrical and thermal behaviors of the EP system are (partially) reproduced using three resistors distributed on an aluminum cylinder. In particular, the first resistor (RL1) is installed in the position of the expected output of the thruster, the second resistor (RL2) in the middle of the cylinder and the third resistor (RL3) on the power supply input from the EPS. For the case presented in this paper, the voltage applied to the resistors is 28 V (the worst case for this version of CTP). Moreover, an external PC emulates the data exchange with EP system. A dedicated software generates a stream of bytes (simulating the data output of the CPU of the EP system) that the CDH acquires and handles.
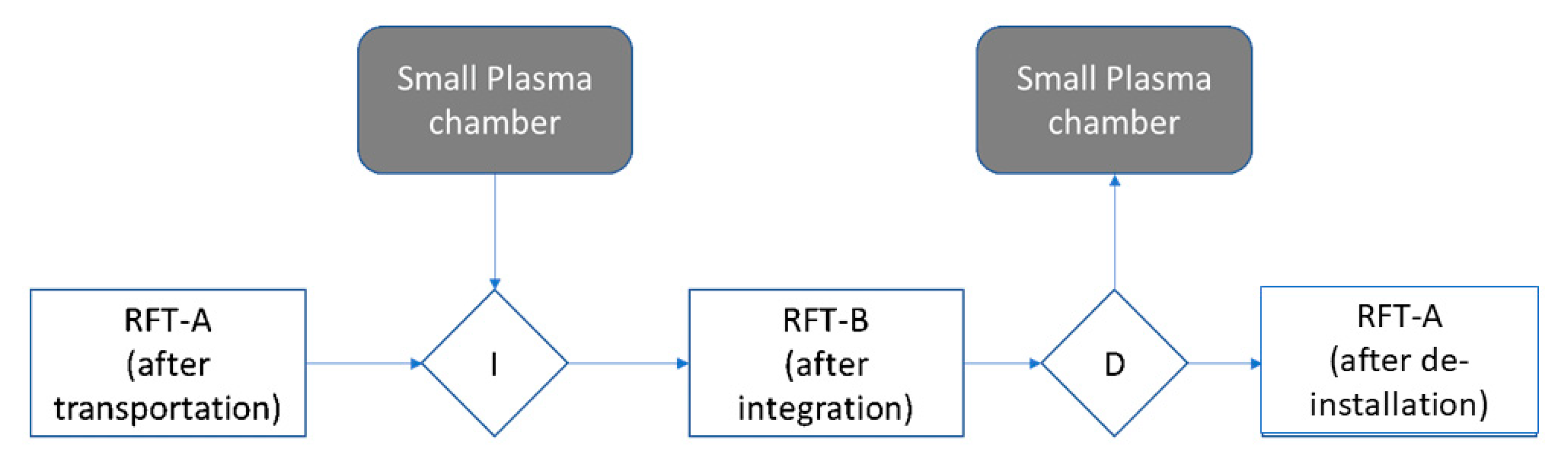
- Reduced Functional Test. The Reduced Functional Test (RFT) is performed to check the main capabilities of CTP and GSS (details are provided in the next paragraph) after major events, for example, before the transportation and the delivery at ESA/ESTEC.
5. Results
- Communication and data acquisition in “basic mode” (OM#1): the housekeeping telemetry data are available, but no info is gathered on the EP system, which is power-off.
- Activation of the EP system, before, and the simulation of the thruster activation, after, are commanded by GSS. Moreover, the data for the emulated PS are acquired and saved on board.
- De-activation of the EP system, stopping the thruster simulation, before, and the entire propulsion system, after. Finally, the CTP operates again in basic mode.
- Verification of the main commands—all of the commands for control the nominal and off-nominal conditions—are checked.
5.1. Communication, Data Handling and Storage
5.2. Data Acquisition
- Housekeeping data: 5 V Bus, 3.3 V Bus currents, Avionics battery packs and Propulsion battery packs information in terms of voltages, currents, temperatures, and recharging currents are provided.
- PS data: information that the EP system sends through specified digital lines (e.g., USB, UART, SPI, and I2C).
- Test data: measurements of mutual impact between EP system and CTP accomplished with on-board sensors/devices and tools by CTP:
- ○
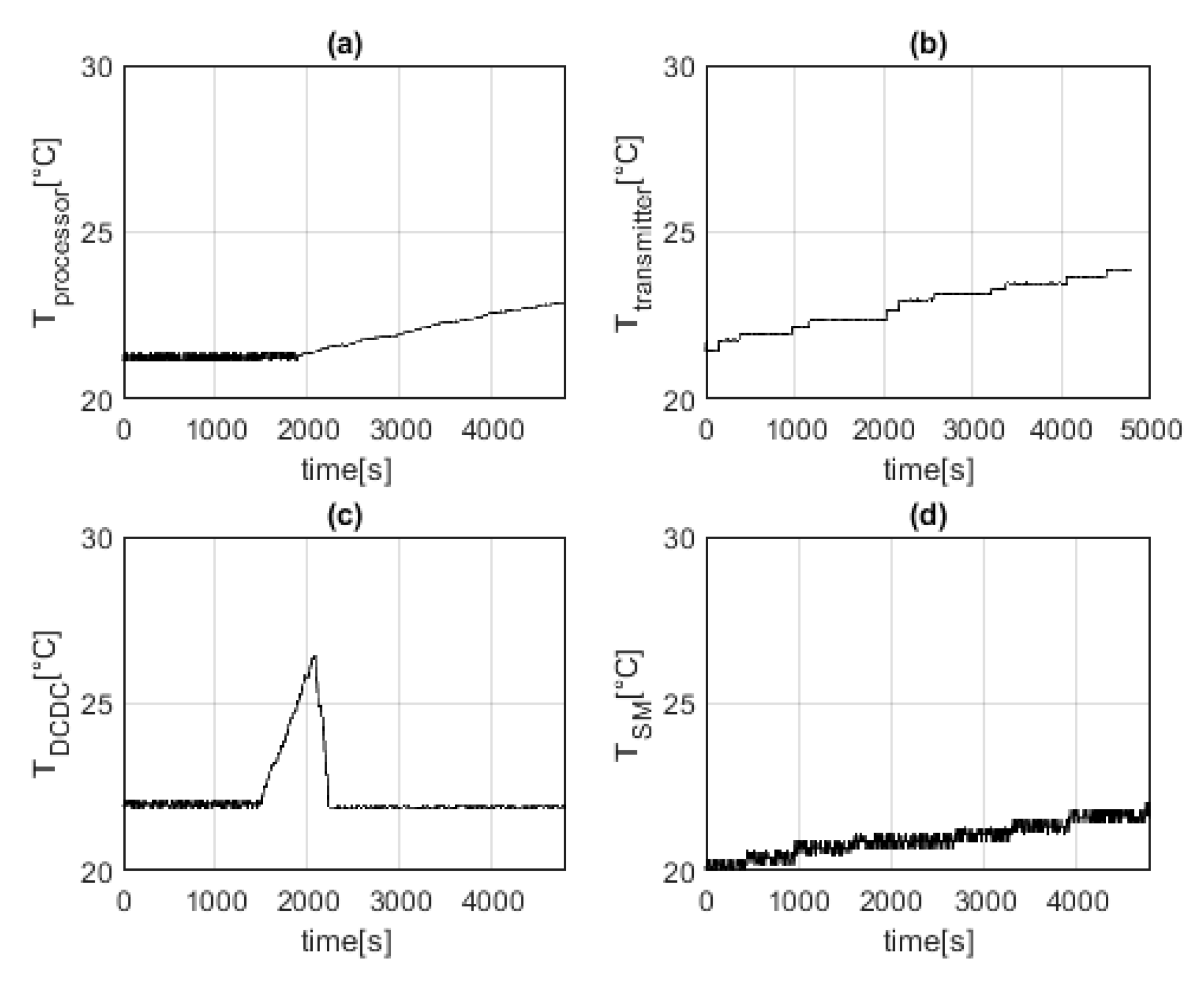
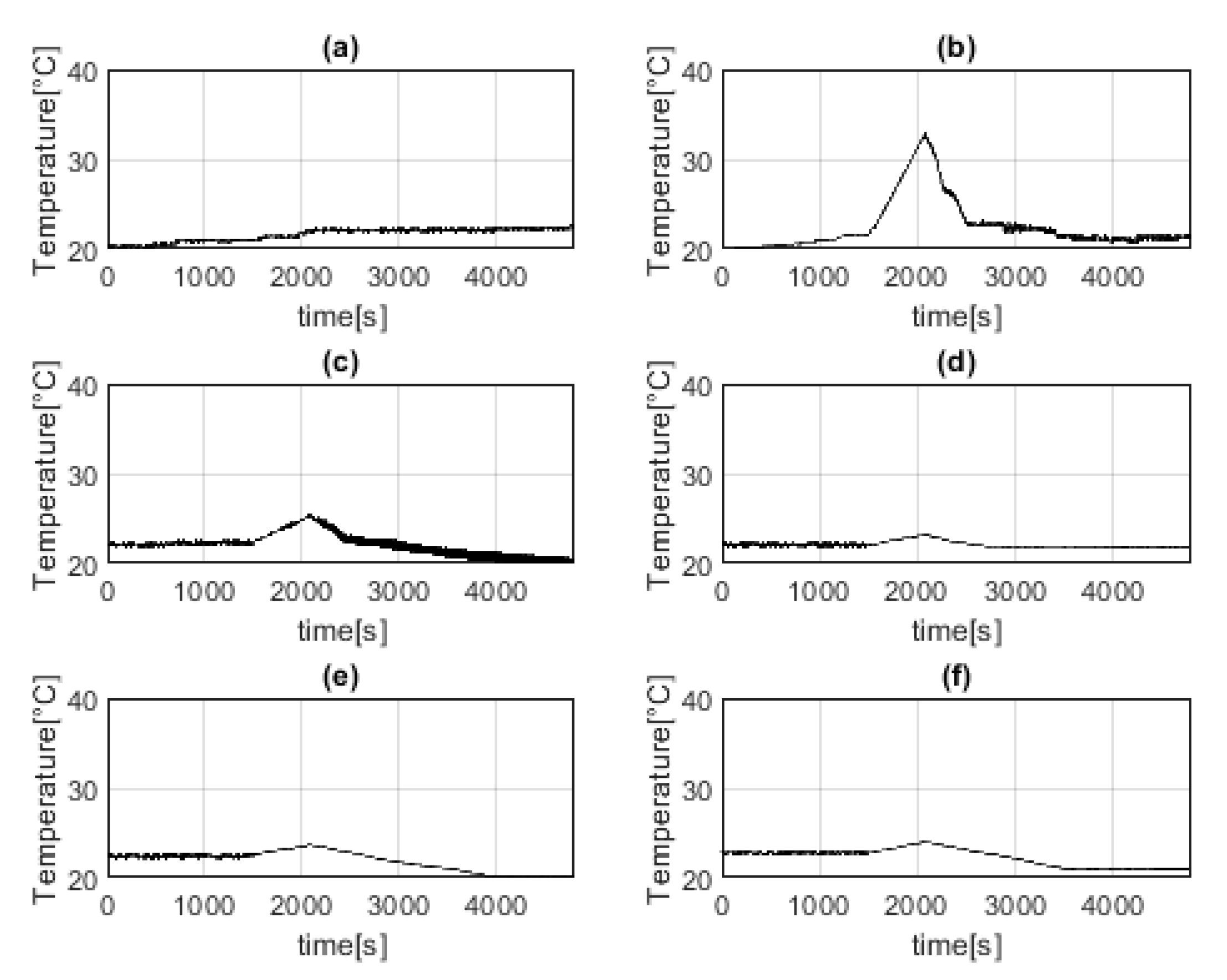
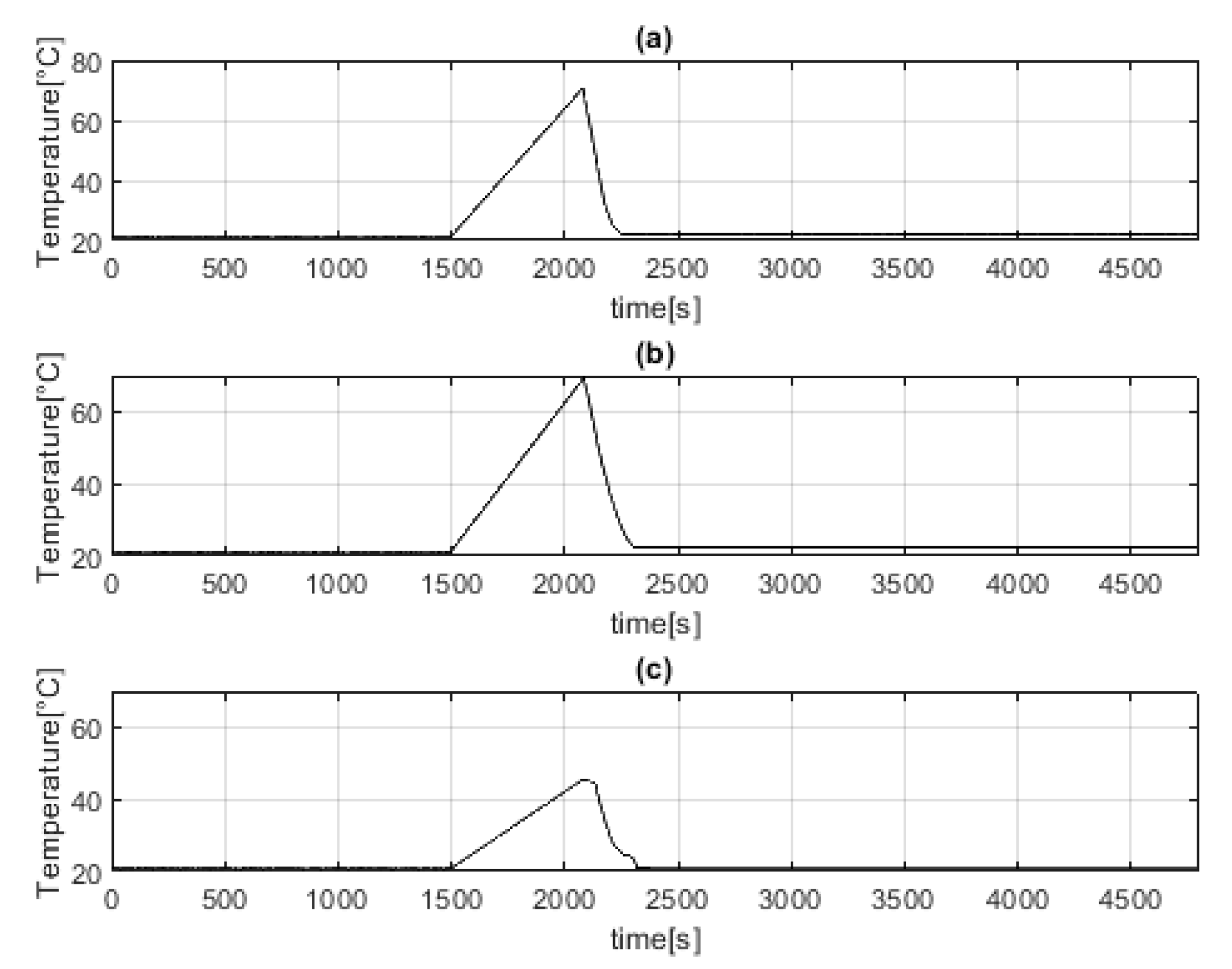
- Temperatures: 10 NTC sensors are installed in different parts of CTP to monitor the variations in different operative modes
- ○
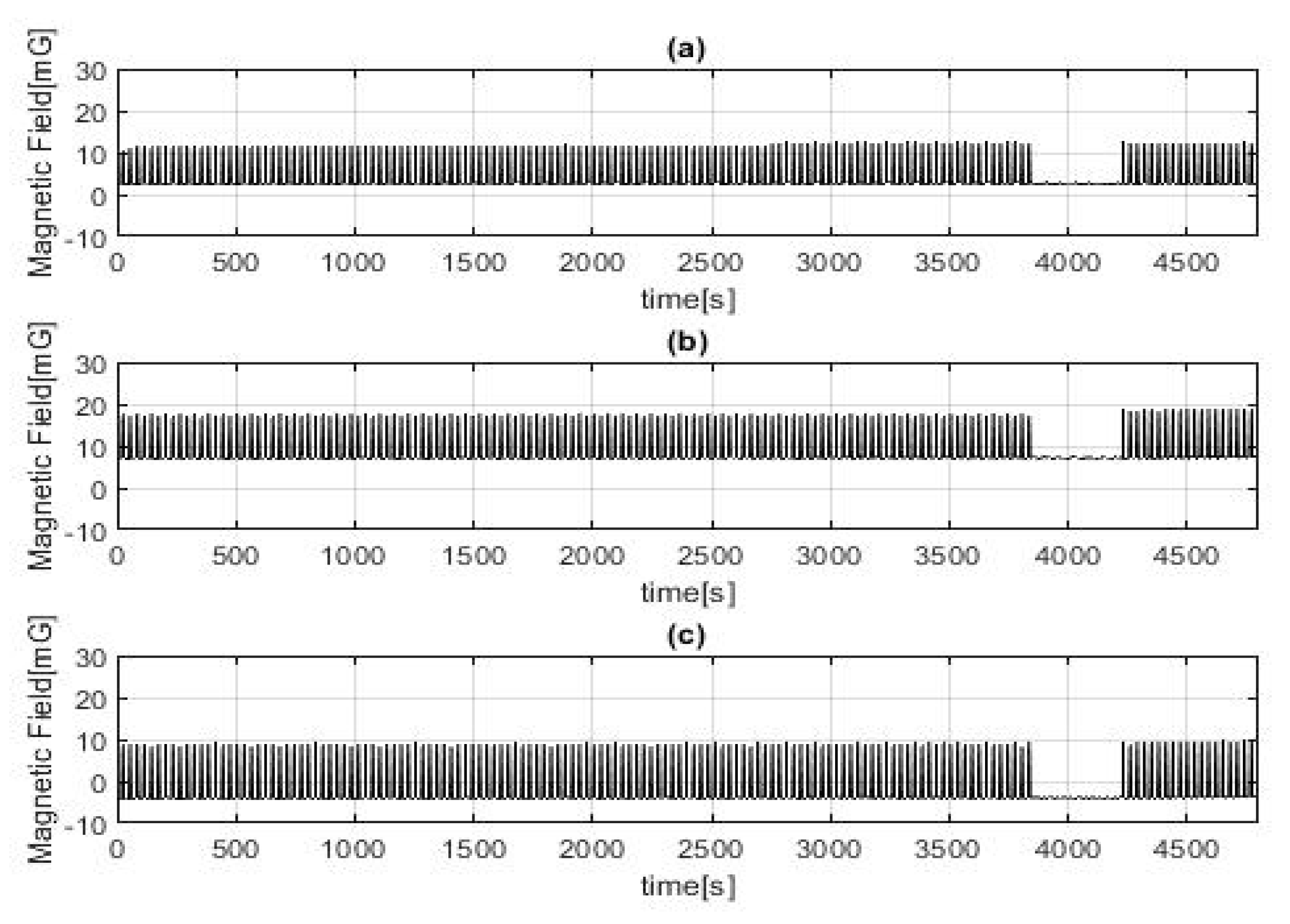
- Magnetic field: 1 triaxial magnetometer posed inside the avionics box to capture change in the magnetic field in different operative modes
- ○
- Voltages and currents: voltage and currents sensing circuits provide information about the consumption of the EP system under testThese measurements are merged in post processing with the measurements of GSE (sensors and tools) installed outside and with no direct interaction with the CTP. Torsional thrust balance allows the thrust values to be obtained. Mass flow sensors determine the mass flow rates. Microscopes and spectrometers are used in post processing to analyze the chemical residual on the CTP surfaces. A Quartz Crystal Microbalance measures the propellant mass variation per area. Amperemeters and voltmeters, thermocouples, and a Magnetic Field Mapper add other measurements of current, voltage, temperature and magnetic field beyond the CTP measurements. Faraday cups and Langmuir probes provide information for plasma analyses, if necessary. All these data are post-processed to have a completed overview of the behavior of both EP system and CTP. The huge number and type of available sensors allow different set-ups, e.g., CTP can be mounted on a torsional balance or in a thrust stand.
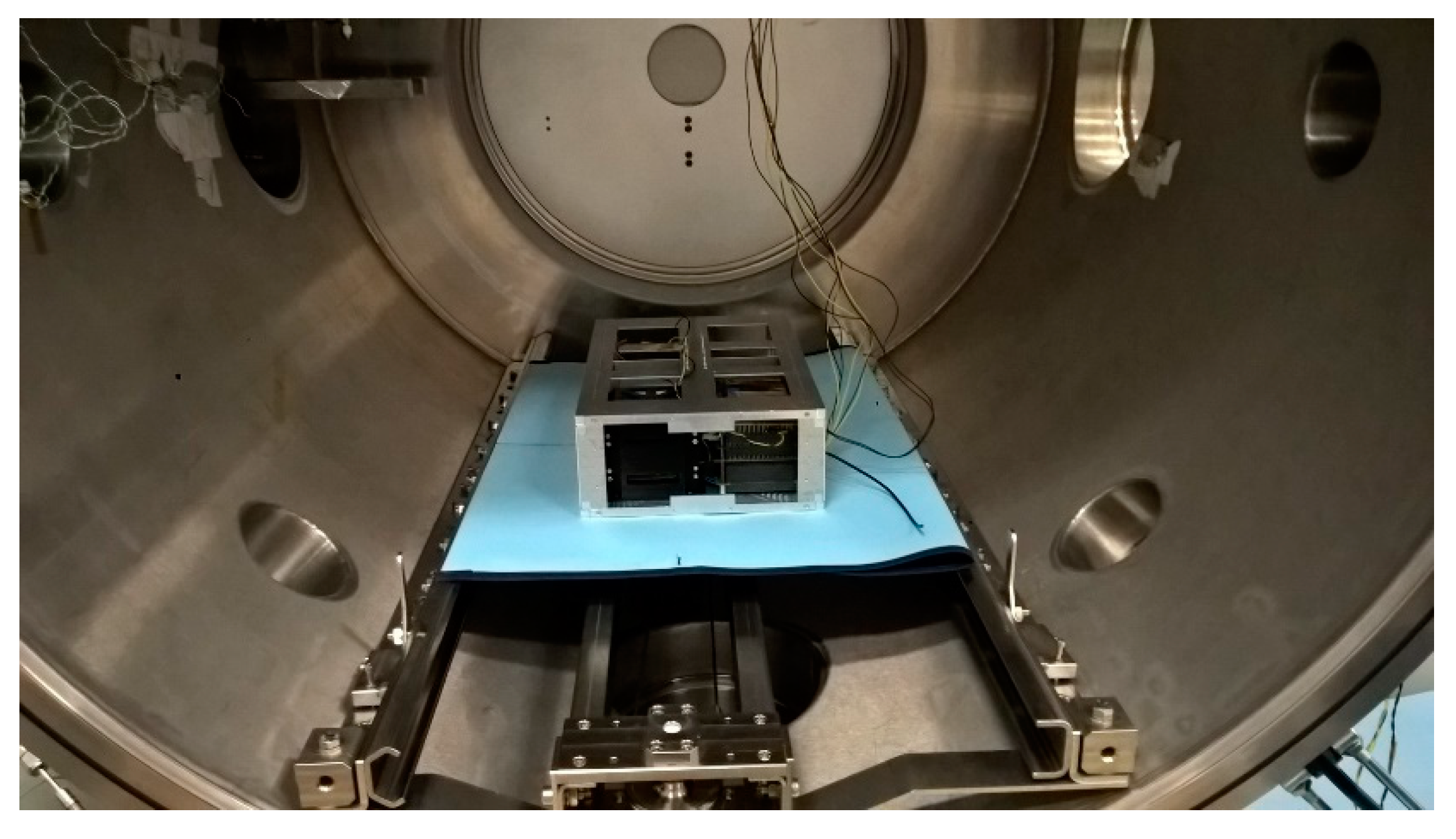
5.3. Integration in EPL Facilities
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Heidt, H.; Puig-Suari, J.; Moore, A.; Nakasuka, S.; Twiggs, R. Cubesat: A New Generation of Picosatellites for Education and Industry Low-Cost Space Experimentation. In Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, USA, 11–26 September 2000. [Google Scholar]
- Perez, F.; Modenini, D.; Vázquez, A.; Aguado, F.; Tubío, R.; Dolgos, G.; Tortora, P.; Gonzalez, A.; Lasagni Manghi, R.; Zannoni, M.; et al. DustCube, a nanosatellite mission to binary asteroid 65803 Didymos as part of the ESA AIM mission. Adv. Space Res. 2018, 62, 3335–3356. [Google Scholar] [CrossRef]
- Kim, S.; Nam, T.; Jung, D. Experimental Validation of an Onboard Transient Luminous Events Observation System for VisionCube via Ground Simulation Environment. Aerospace 2018, 5, 100. [Google Scholar] [CrossRef]
- Muri, P.; McNair, J. A Survey of Communication Sub-Systems for Intersatellite Linked Systems and CubeSat Missions. J. Commun. Med. 2012, 7, 290–308. [Google Scholar] [CrossRef]
- Praks, J.; Kestilä, A.; Tikka, T.; Leppinen, H.; Khurshid, O.; Hallikainen, M. AALTO-1 Earth Observation Cubesat Mission—Educational Outcomes. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Schoolcraft, J.; Klesh, A.; Werne, T. MarCO: Interplanetary Mission Development on a CubeSat Scale. In Proceedings of the 14th International Conference on Space Operations, Daejeon, Korea, 16–20 May 2016. [Google Scholar]
- Peral, E.; Im, E.; Wye, L.; Lee, S.; Tanelli, S.; Rahmat-Samii, Y.; Horst, S.; Hoffman, J.; Yun, S.H.; Imken, T.; et al. Radar Technologies for Earth Remote Sensing from CubeSat Platforms. Proc. IEEE 2018, 106, 404–418. [Google Scholar] [CrossRef]
- Hand, E. Cubesat networks hasten shift to commercial weather data. Science 2017, 357, 118–119. [Google Scholar] [CrossRef]
- Pittella, E.; Pisa, S.; Pontani, M.; Nascetti, A.; D’Atanasio, P.; Zambotti, A.; Hadi, H. Reconfigurable S-Band Patch Antenna System for Cubesat Satellites. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 6–13. [Google Scholar] [CrossRef]
- Barnwell, N.; Ritz, T.; Parry, S.; Clark, M.; Serra, P.; Conklin, J.W. The Miniature Optical Communication Transceiver—A Compact, Power-Efficient Lasercom System for Deep Space Nanosatellites. Aerospace 2019, 6, 2. [Google Scholar] [CrossRef]
- Bowen, J.; Villa, M.; Williams, A. Cuebsat Based Rendezvous, Proximity Operations, and Docking in the CPOD Mission. In Proceedings of the AIAA/USU Conference on Small Satellite, Logan, UT, USA, 8–13 August 2015. [Google Scholar]
- Corpino, S.; Caldera, M.; Nichele, F.; Masoero, M.C.; Viola, N. Thermal design and analysis of a nanosatellite in low earth orbit. Acta Astronaut. 2015, 115, 247–261. [Google Scholar] [CrossRef]
- Franchi, L.; Feruglio, L.; Corpino, S.; Mozzillo, R. Model predictive and reallocation problem for CubeSat fault recovery and attitude control. Mech. Syst. Signals Process. 2018, 98, 1034–1055. [Google Scholar] [CrossRef]
- Bouwmeester, J.; Gill, E.K.A.; Speretta, S.; Uludag, M.S. A new approach on the physical architecture of cubesats & pocket qubes. JBIS J. Br. Interplanet. Soc. 2018, 71, 239–249. [Google Scholar]
- Zheng, Z.; Guo, J.; Gill, E. Onboard autonomous mission re-planning for multi-satellite system. Acta Astronaut. 2018, 145, 28–43. [Google Scholar] [CrossRef]
- Levchenko, I.; Bazaka, K.; Ding, Y.; Raitses, Y.; Mazouffre, S.; Henning, T.; Klar, P.J.; Shinohara, S.; Schein, J.; Garrigues, L.; et al. Space micropropulsion systems for Cubesats and small satellites: From proximate targets to furthermost frontiers. Appl. Phys. 2018, 5, 011104. [Google Scholar] [CrossRef]
- Mueller, J.; Hofer, R.; Parker, M.; Ziemer, J. Survey of Propulsion Options for Cubesats. In Proceedings of the 57th JANNAF Propulsion Meeting, Colorado Springs, CO, USA, 3–7 May 2010. [Google Scholar]
- Walker, R.; Liu, M. Integration of Electric Propulsion Systems within Spacecraft—An Overview. In Proceedings of the 33rd International Electric Propulsion Conference, Washington, DC, USA, 6–10 October 2013. [Google Scholar]
- Lemmer, K. Propulsion for CubeSats. Acta Astronaut. 2017, 134, 231–243. [Google Scholar] [CrossRef]
- Obiols-Rabasa, G.; Corpino, S.; Mozzillo, R.; Stesina, F. Lessons Learned of a Systematic Approach for the E-ST@R-II CUBESAT Environmental Test Campaign. In Proceedings of the International Astronautical Congress, IAC, Jerusalem, Israel, 12–16 October 2015; Volume 11, pp. 8474–8482. [Google Scholar]
- Guerrieri, D.C.; Silva, M.A.C.; Cervone, A.; Gill, E. An analytical model for characterizing the thrust performance of a Low-Pressure Micro-Resistojet. Acta Astronaut. 2018, 152, 719–726. [Google Scholar] [CrossRef]
- Stesina, F.; Corpino, S.; Feruglio, L. An in-the-loop simulator for the verification of small space platforms. Int. Rev. Aerosp. Eng. (IREASE) 2017, 10, 50–60. [Google Scholar] [CrossRef]
- Gagne, K.R.; McDevitt, M.R.; Hitt, D.L. A Dual Mode Propulsion System for Small Satellite Applications. Aerospace 2018, 5, 52. [Google Scholar] [CrossRef] [PubMed]
- Montag, C.; Starlinger, V.; Herdrich, G.; Schönherr, T. A High Precision Impulse Bit Pendulum for a Hardware-in-the-Loop Testbed to Characterize the Pulsed Plasma Thruster PETRUS 2.0. In Proceedings of the 7th Russian-German Conference on Electric Propulsion, Giessen, Germany, 21–26 October 2018. [Google Scholar]
- Stesina, F.; Corpino, S.; Calvi, D.; Saccoccia, G.; Gonzalez Del Amo, J.; Bosch Borras, E. Design of a Test Platform for Miniaturized Electric Propulsion. In Proceedings of the 69th International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Krejci, D.; Reissner, A.; Seifert, B.; Jelem, D.; Hörbe, T.; Plesescu, F.; Friedhoff, P.; Lai, S. Demonstration of the IFM nano-FEEP Thruster in Low Earth Orbit. In Proceedings of the 4S Symposium, Sorrento, Italy, 28 May–1 June 2018. [Google Scholar]
- Rafalskyi, D.; Aanesland, A. A Neutralizer-Free Gridded Ion Thruster Embedded into A 1U Cubesat Module. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Lascombes, P.; Henri, D. Electric Propulsion for Small Satellites Orbit Control and Deorbiting: The Example of a Hall Effect Thruster. In Proceedings of the Space Ops Conference, Marseille, France, 28 May–1 June 2018. [Google Scholar]
- Manente, M.; Trezzolani, F.; Magarotto, M.; Fantino, E.; Selmo, A.; Bellomo, N.; Pavarin, D. Regulus: A propulsion platform to boost small satellite missions. Acta Astronaut. 2019, 157, 241–249. [Google Scholar] [CrossRef]
- Montag, C.; Herdrich, G.; Schönherr, T. Modifications and Experimental Analysis towards an Update of the Pulsed Plasma Thruster PETRUS. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Stelwagena, I.F.; de Jonga, M.J.; Xua, W.; Viseea, R.; Grustan-Gutierrezb, E.; Redwoodb, O.; Huhb, J.; Grayc, H.; Giannettic, V.; Liljeholmd, L.; et al. Development of a High-Performance Low-Cost PPU for an Electrospray Colloid Electric Propulsion System for Small Satellite Applications. In Proceedings of the 69th International Astronautical Congress (IAC), Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Courtney, D.G.; Li, H.Q.; Lozano, P. Emission Measurements from Planar Arrays of Porous Ionic Liquid Ion Sources. IOP J. Phys. D Appl. Phys. 2012, 45, 485203. [Google Scholar] [CrossRef]
- Tummala, A.; Dutta, A. An Overview of Cube-Satellite Propulsion Technologies and Trends. Aerospace 2017, 4, 58. [Google Scholar] [CrossRef]
- Siddiqui, M.U.; Cretel, C.; Synowiec, J.; Hsu, A.G.; Young, J.A.; Spektork, R. First Performance Measurements of the Phase Four RF Thruster. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Developer | EP System Technology |
|---|---|
| Enpulsion–Austria | IFM-FEEP [26] |
| ThrustMe–France | NPT30-Gridded ion thruster [27] |
| ExoTrail–France | EXO-Hall effect thrusters [28] |
| T4I–Italy | Regulus [29] |
| Institute of Space Systems (IRS) at University of Stuttgart–Germany | PETRUS-coaxial, breech fed and low energy PPT [30] |
| GOMSPACE–Denmark | HiperLoc-EP–Electrospray [31] |
| Busek Co Inc.–USA | BET–Electrospray [32] |
| ACCION–USA | IET5000-Electrospray [33,34] |
| Statement |
|---|
The interactions between Propulsion systems and CubeSats shall be evaluated in term of
|
| CTP shall provide/support the direct/indirect measurements of thrust, mass, electrical and diagnostics parameters |
| Only complete propulsion systems shall be considered (stand-alone thrusters are not object of the test). Complete EP systems include (at least): thruster, tank, PPU (Power Unit), PFU (Propellant Feed Unit), where required |
| CTP shall use CubeSat technology and Commercial Off the Shelf components (MIL or S items can be included in case no COTS are available or for safety critical technology) |
| CTP shall be integrated in the test facilities (e.g., CORONA or SPF) at Propulsion Laboratory (ESA/ESTEC) |
| CTP shall guarantee one failure-points protection with respect to the operators and the test operations |
| CTP shall be compliant with the 6U CubeSat Design Specification |
| CTP shall provide voltage to propulsion system under test up to 2A @28V (peak power 56 W) |
| CTP shall provide voltage to propulsion system in the range 5–28 V |
| No external power supplier shall be adopted to supply the CTP during the test (a part for battery recharging activity) |
| CTP shall exchange data towards propulsion sys using one or more of these interfaces: UART, USB, I2C, SPI, CAN bus. |
| CTP shall host the EP system with a volume up to 4U |
| CTP operations shall be managed both autonomously by the on-board systems and by the operators through a dedicated interface human/CTP. |
| Human operator shall have a higher priority in the decision-making activity during every test campaign |
| The program shall reflect standard procedures and methods used in the industrial field and recognized by the Agency (ESA) |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stesina, F. Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems. Aerospace 2019, 6, 99. https://doi.org/10.3390/aerospace6090099
Stesina F. Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems. Aerospace. 2019; 6(9):99. https://doi.org/10.3390/aerospace6090099
Chicago/Turabian StyleStesina, Fabrizio. 2019. "Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems" Aerospace 6, no. 9: 99. https://doi.org/10.3390/aerospace6090099
APA StyleStesina, F. (2019). Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems. Aerospace, 6(9), 99. https://doi.org/10.3390/aerospace6090099