1. Introduction
Electric vertical take-off and landing aircrafts (eVTOLs) are being built and tested, and their configurations vary from hover bikes to electric ducted fans. In 2010, Moore [
1] presented the NASA Puffin electric tailsitter VTOL concept and highlighted the potential of electric propulsion to enable cheap, quiet, and reliable short-range VTOLs. That same year the company ZeeAero, now Kitty Hawk [
2], was founded by Kroo with the aim of building an eVTOL flying car. From that moment on, many researchers, companies, and startups started to work on eVTOLs. Now, most of the major aircraft companies are directly developing their own electric VTOL or have subsidiaries doing it. More than 130 electric VTOL concepts have been proposed [
3] and venture capitalists have invested more than 1 billion dollars into promising eVTOL startups [
4]. Moore and his colleagues have worked on the idea of on-demand air mobility [
5,
6], hybrid eVTOLs [
7], the advantages of electric propulsion compared to internal combustion and gas turbines [
8], and the distributed electric propulsion of the X-57 Sceptor [
9]. McDonald has worked on electric propulsion modeling for conceptual design [
10] and developed the OpenVSP design tool.
Most of the research has been conducted by private companies. Uber has hired both Moore and McDonald and is trying to build, with its program Uber Elevate, the infrastructure for eVTOLs [
11]. Kitty Hawk, Lilium, Joby Aviation, and E-Hang are four of the startups developing electric VTOLs. Kitty Hawk has developed and is now testing two vehicles: Cora, the lift + cruise air taxi and the Flyer, a hoverbike [
12]. Lilium is a German startup that is building an electric ducted fan eVTOL. They have flown many prototypes including a two-seater jet and are now developing a five-seater air taxi [
13]. Joby Aviation has performed tests on electric propulsion and is building an eVTOL prototype [
14]. E-Hang is a Chinese company manufacturing quadrotor UAVs that has built and tested, with humans on board, the E-Hang 184 passenger drone [
15].
This article tries to understand which is the best eVTOL design, presenting and discussing all the different configurations, from the first developed in the fifties and sixties to the present eVTOL configurations. Then, the performances of the three main eVTOL configurations are evaluated and compared using data from existing prototypes.
2. Materials and Methods
During the fifties and sixties, after the development of the helicopter, a great research effort was put into the development of a machine able to fly as fast as an airplane and able to take off and land vertically like a helicopter, the VTOL aircraft. Many different configurations were tested, and the only VTOL put into operation was the Harrier. Years later it was followed by the Yak-38, the V-22, and the F-35. The power plants available to the designers were piston engines and jets. The efficiency of these engines grows with their size, this means that having multiple power plants on the aircraft means a reduction in efficiency and power at a fixed total mass. Instead, electric motors have negligible variation in efficiency at different dimensions. At that time, choosing between using the same power plant for hover and cruise, or having two different power plants was the main design decision. Different configurations were tested by different companies during the span of two decades. The main configurations are listed following the criteria used by the American Helicopter Society [
16] and the advantages and disadvantages of each configuration [
17] are discussed.
The VTOLs that use the same propulsion system for hover and forward flight can rotate the direction of the thrust in different ways. The tail-sitters rotate the entire aircraft. They are conceptually simple but difficult and risky to control [
17]. The Harrier configuration is called vectored thrust because it can orientate mechanically the direction of the thrust. In the beginning, vectored thrust VTOLs, like the first Harrier prototypes and the Bell X-14, suffered from suck-down, engine gyroscopic effects, and hot gas re-ingestion [
17,
18]. When these problems were solved, the Harrier became the first operational VTOL attack aircraft [
19]. The deflected-slipstreams use flaps to deflect the slipstream of the propellers. The Ryan VZ3 achieved excellent STOL performances but no VTOL capabilities [
17]. The tilt-jets rotate the entire nacelle of the jet. The tiltrotors like the V-22 Osprey and the Agusta Westland AW609 tilt the entire rotor. They have hover performances comparable to the ones of a helicopter with the advantage of not having the retreating blade problem in forward flight. They are complex machines. The tilt-wings rotate the entire wing, the engines and the propellers as a single piece. Rotating the wing in hover avoids the impinging of the propeller slipstream on it, a problem that reduces the thrust in the hover of tiltrotors. The lift produced by the wing is augmented, at high angles of attack, by the blowing effect of the propellers. Tilt-wings of the fifties and sixties suffered from control problems due to low pitch control power, were mechanically complex, and the loss of an engine could cause catastrophic roll upset [
17]. NASA’s Greased Lightning new tilt-wing hybrid diesel-electric VTOL demonstrated that these problems are solvable with electric motors and electronic control [
20]. Tilt-ducts use ducted fans which have the advantage of reducing blade tip loss and producing higher thrust for the rotor diameter. The Doak VZ-4 and the Bell X-22 proved the feasibility of the concept but struggled with control problems [
17].
Other VTOLs like the Short SC.1, the Dassault Balzac V, and the Mirage III V had an additional power plant for hover. The Mirage III V is the fastest VTOL on record, reaching Mach 2.04 in September 1966. The VTOL capability was achieved adding vertical jets in the fuselage, which reduced the useful load fraction [
17,
21].
The lift + lift/cruise VTOLs use one set of engines for lift only and another set of engines for both lift and cruise. The Soviet Yak 38 is one of these VTOLs, it vectored the thrust of the main engine and used two additional engines behind the cockpit for hover. The tip-jets are a kind of compound autogyros that use a rotor powered by jets at the tip of the blade, propellers for horizontal thrust and a wing to generate lift. The ejector VTOLs eject high-pressure engine efflux into a channel called the augmentor causing additional ambient air to accelerate through the channel and mix with the engine exhaust. The Lockheed XV-4A Hummingbird applied this concept but tests on the prototypes showed results inferior to laboratory tests, incomplete mixing, and ram drag [
17]. The fan VTOLs have one or more additional fans buried in the wings or fuselage powered by the main engine. The F-35 has a fan behind the cockpit which provides, with the nozzle of the main engine swiveled, the thrust required for hover. The Rayan XV-5A had two fans-in-wing powered by the exhaust gases of its two turbojets. The two prototypes crashed during transition because of the slow control response and narrow transition corridor [
17]. The last VTOL category is the compound helicopter which uses a rotor to hover and has a propeller for forward flight.
In recent years many companies and startups have started developing and testing different electric VTOLs. The website Electric VTOL News [
22], published by the Vertical Flight Society, classifies eVTOLs in the following categories:
- -
Vectored Thrust
- -
Lift + Cruise
- -
Wingless
- -
Hoverbikes
- -
eHelos
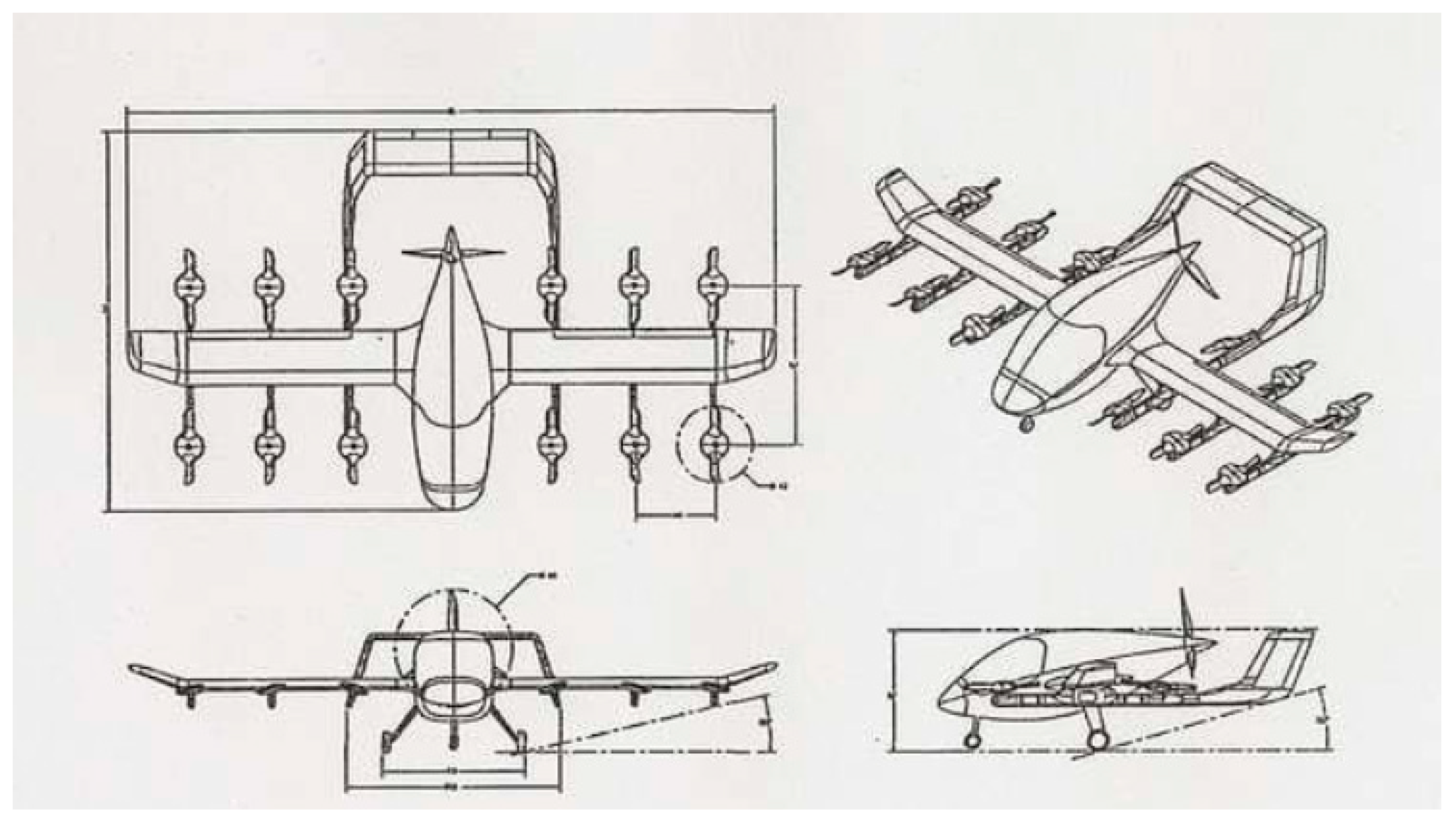
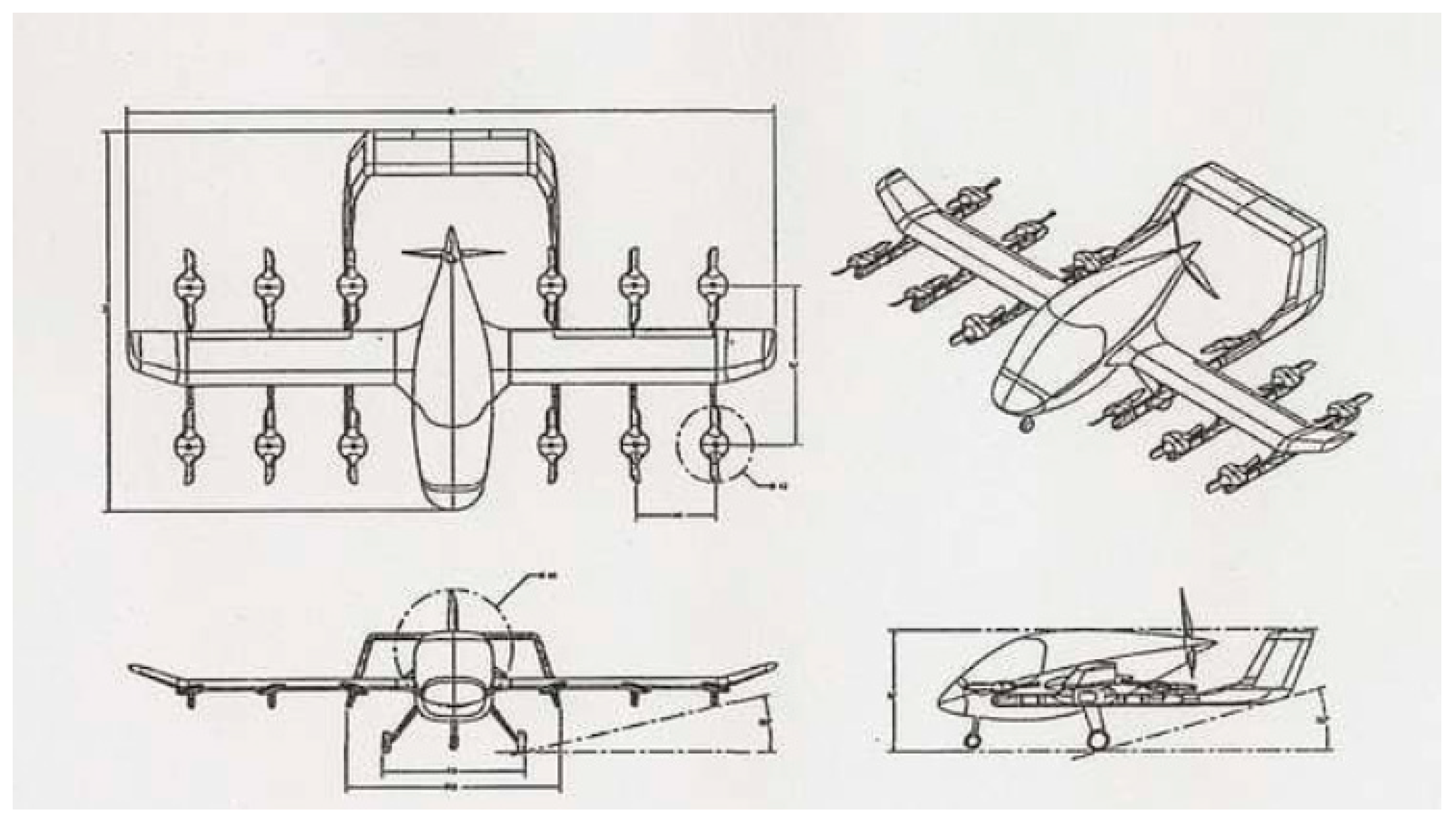
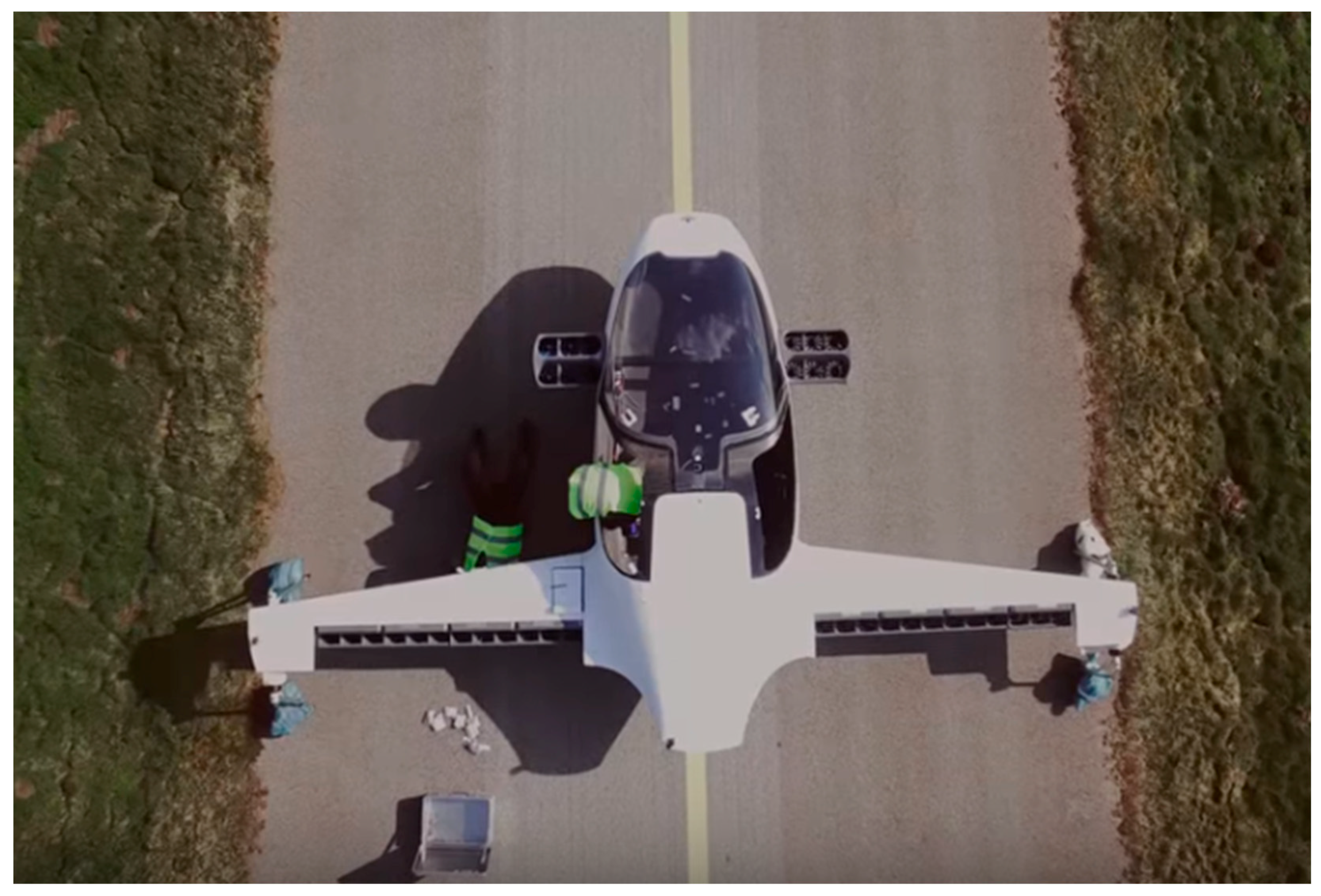
The vectored thrust eVTOLs have a wing for an efficient cruise and use the same propulsion system for both hover and cruise. The Lilium Jet, the Aurora LightningStrike, and the Joby S2 and S4 are in this category (
Figure 1). The Lilium Jet is a tilt duct able to increase the lift coefficient of the wing, during the transition, sucking air from the upper surface of the wing and pushing it down with the electric jets. The Aurora LightningStrike is a tilt-wing with fans-in-wing. The Joby S2 is a tilt prop. The main difference between eVTOLs in this category is whether they have fans or propellers.
The lift + cruise eVTOLs have a wing for an efficient cruise, like vectored thrust eVTOLs, but they use two different propulsion systems for hover and cruise flight. The ZeeAero Z-P2, the Kitty Hawk Cora, and the Aurora Flight Sciences eVTOL are in this category (
Figure 2).
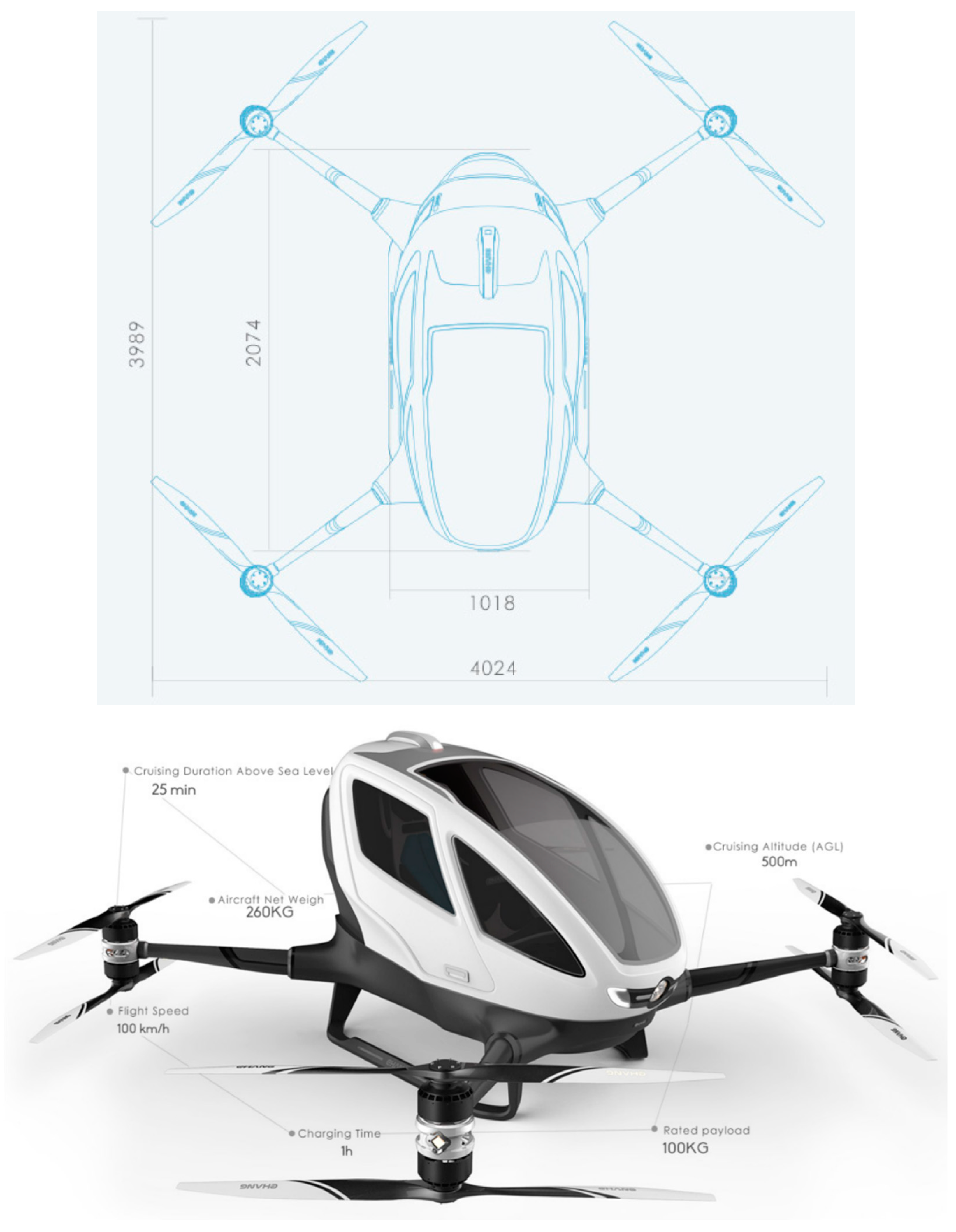
The wingless eVTOLs are multirotors. They have large disk actuator surface which makes them efficient in hover, but they do not have a wing for an efficient cruise. These vehicles are suited for short-range operations in cities where they can fly over traffic jams. Two VTOLs in this class are already in the certification phase: The E-Hang 184 and the Volocopter 2X (
Figure 3).
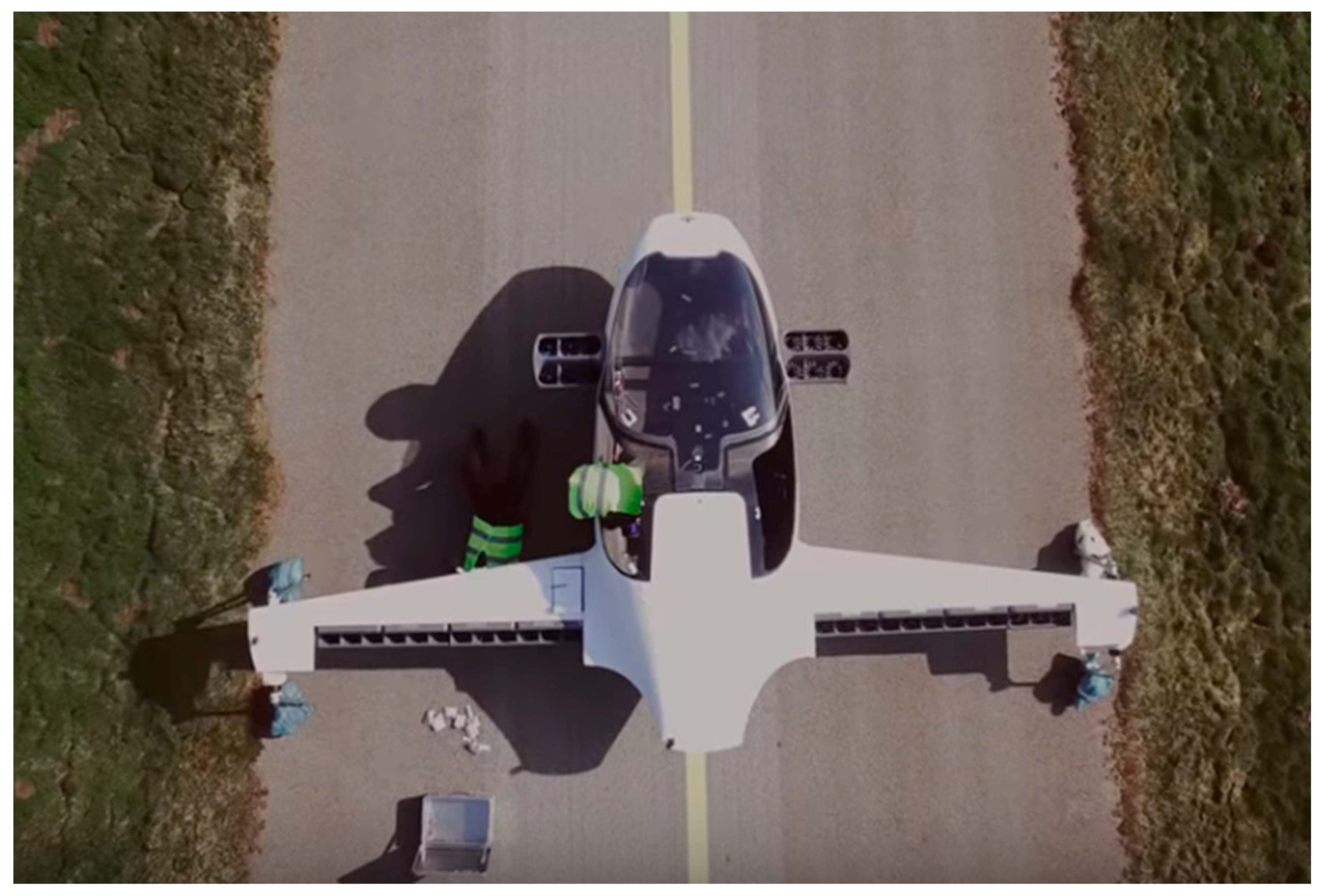
Hoverbikes are multirotors that can be flown like a motorbike. The pilot sits on a saddle or is standing. An example is the prototype built and flown by Kitty Hawk (
Figure 4).
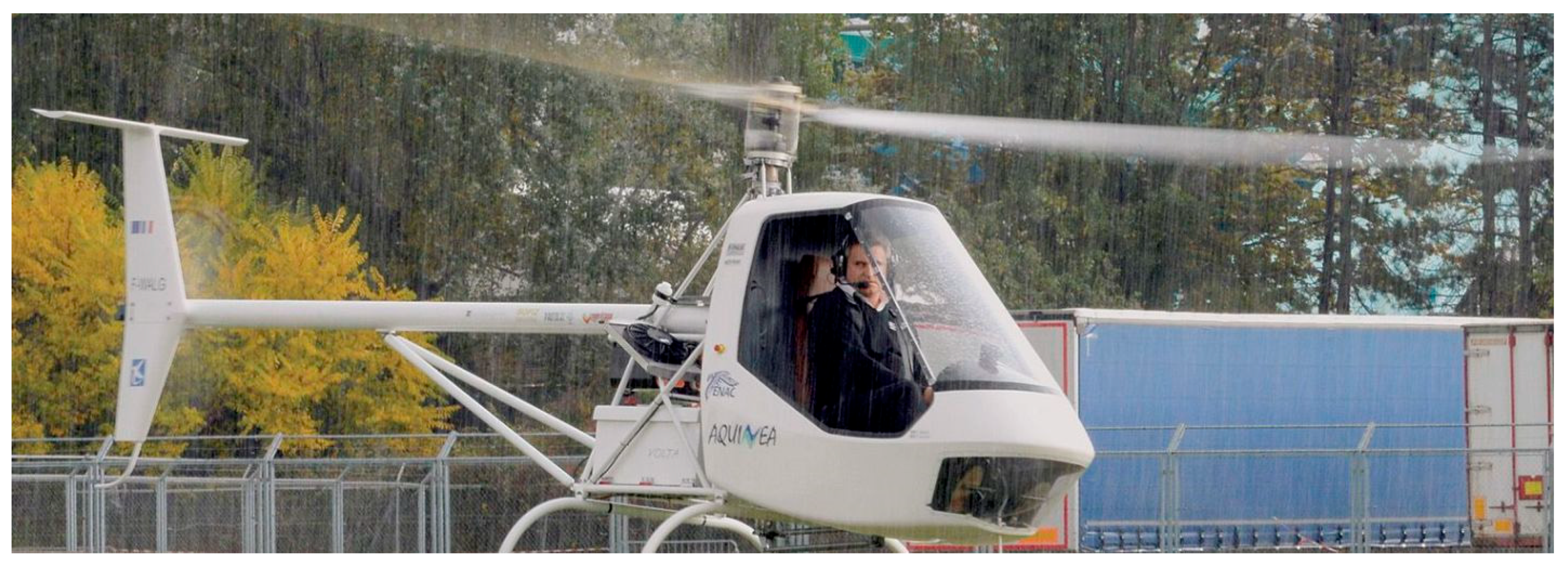
eHelos are electrical conventional helicopters. An example is the Aquinea Volta (
Figure 5).
The E-Hang 184, the Kitty Hawk Cora, and the Lilium Jet have been chosen as the reference for the comparison of the three main eVTOL categories. Their performances have been computed using analytical methods [
32] such as the disk actuator theory [
33] to evaluate hover performances, Breguet’s equation for electric flight [
34] to compute the theoretical range, empirical methods to evaluate the drag of the eVTOL from the Hoerner’s book [
35] and standard drag, power, efficiency considerations.
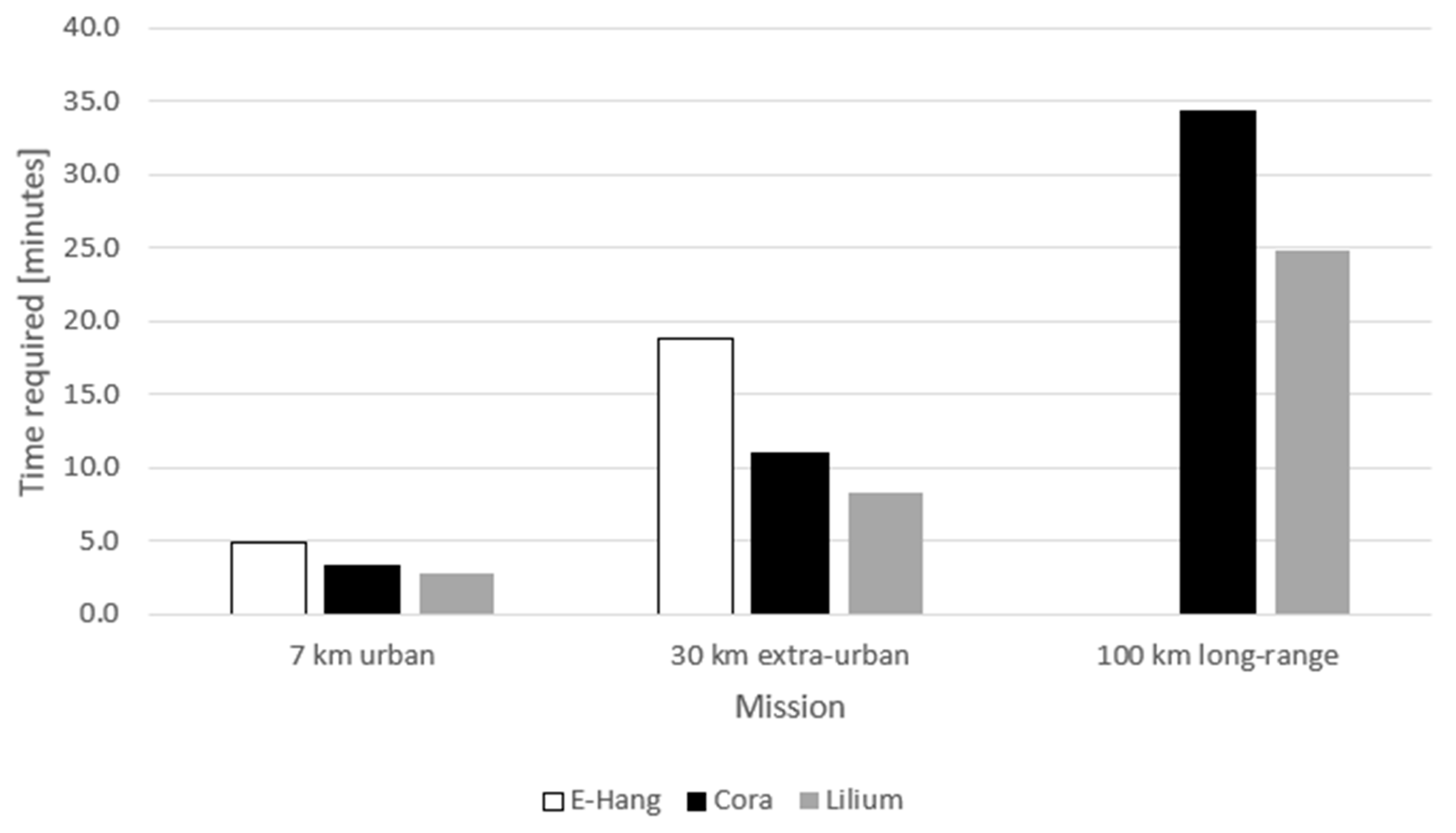
The comparison has been performed evaluating five parameters and computing the energy and time required to perform three reference missions. The five parameters are disk loading, total hover time, cruise speed, practical range, and flight time. The reference missions are:
- -
7 km urban mission
- -
30 km extra-urban mission
- -
100 km long-distance mission
4. Discussion
The three configurations examined have been compared. Their hover and cruise flight parameters are presented in
Table 16 and their performances for the three reference missions are presented in
Table 17,
Figure 10 and
Figure 11.
Table 16 shows that the multirotor configuration represented by the E-Hang 184 is the best suited to hover flight while Lilium is the best suited to cruise flight. The lift + cruise Cora is a compromise. It has less range and flight speed than Lilium but good hover performances comparable to the wingless multirotor configuration.
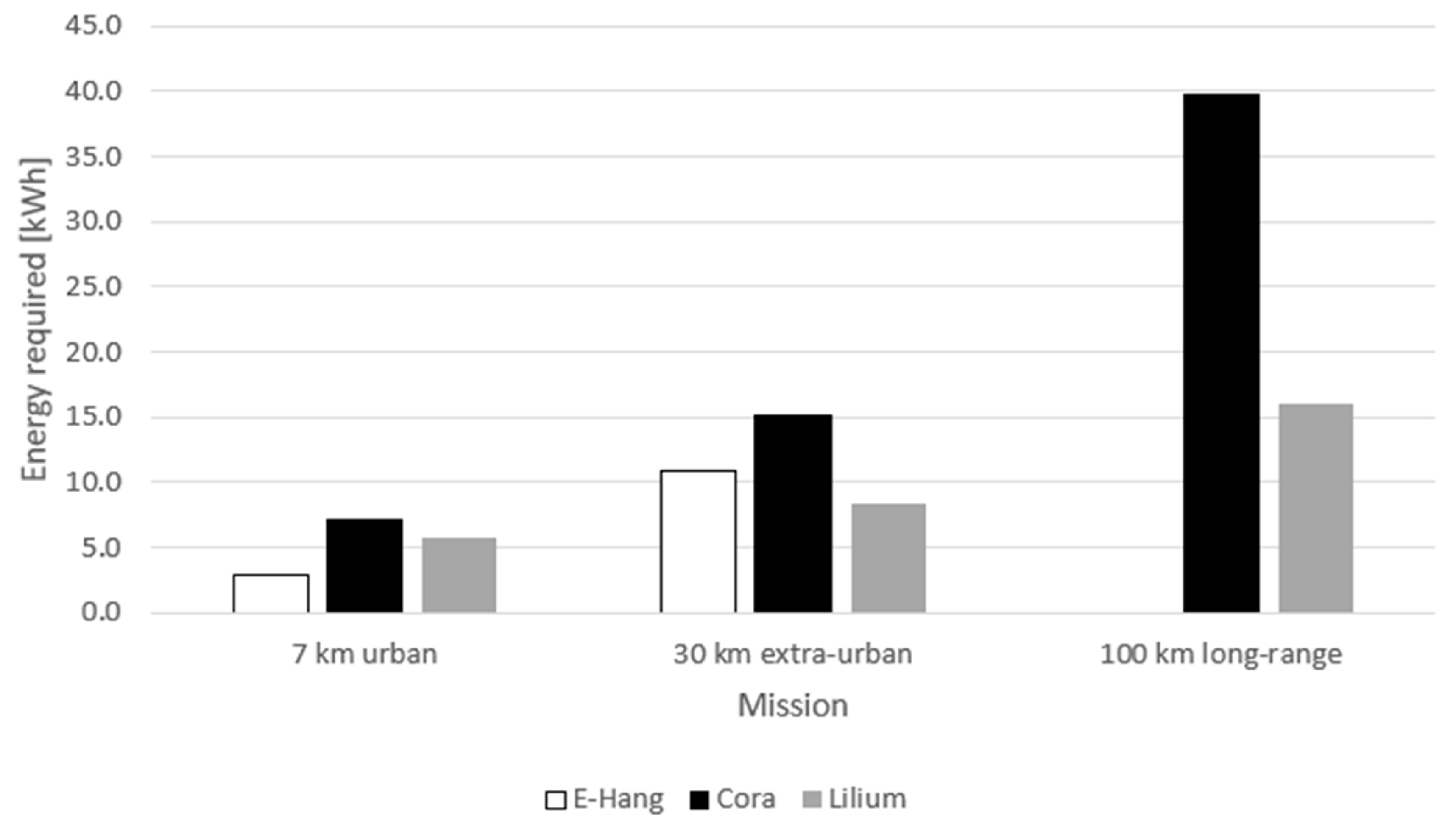
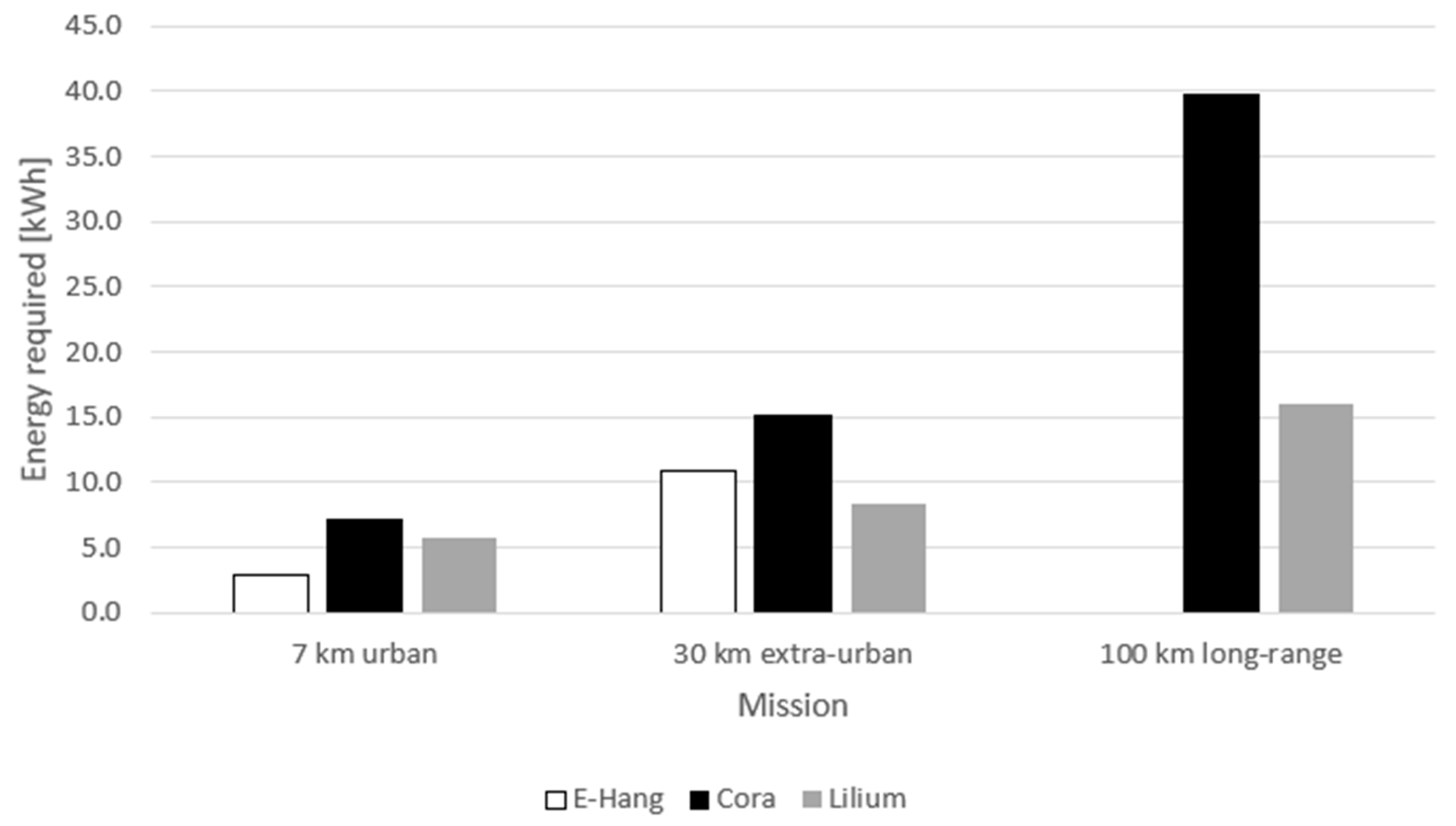
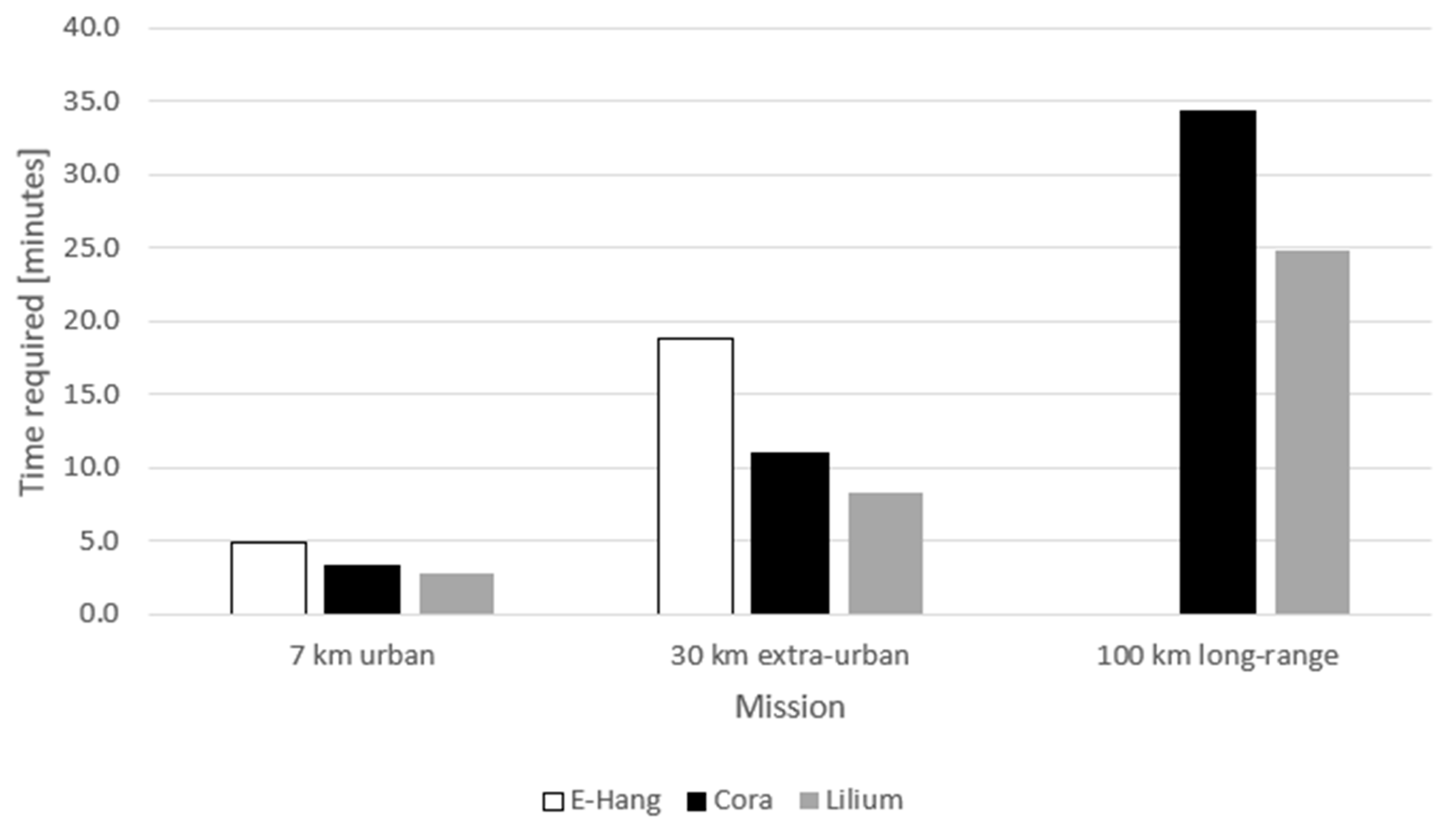
The 7 km urban mission is completed in 4.9 min by E-Hang, 3.3 min by Cora, and 2.8 min by Lilium. E-Hang requires 3 kWh, Cora 7.1 kWh, and Lilium 5.7 kWh. The 30 km extra-urban mission is completed in 18.7 min by E-Hang, 10.9 min by Cora, and 8.2 min by Lilium. E-Hang requires 10.9 kWh, Cora 15.2 kWh, Lilium 8.3 kWh. The 100 km long-range mission cannot be completed by E-Hang and is almost Cora’s computed maximum range. It is completed in 34.3 min by Cora and 24.9 min by Lilium. Cora requires 39.7 kWh and Lilium 16.1.
The urban mission comparison shows that multirotors require less energy for short-range missions. In the extra-urban mission, the cruise phase is as important as the hover phase, and the energy required by the three configurations is comparable. In the long-range mission, cruise efficiency is more important. E-hang’s range is insufficient to complete it. Cora’s parasitic drag caused by the pylons and vertical thrust propellers increases the power required in cruise. Its cruise speed is less than Lilium’s and the energy required is more.
Lilium’s hover is so power demanding that it requires batteries with higher specific power than the Tesla batteries considered for the computations. This means that the aerodynamic advantages of this configuration are balanced by higher demands on the batteries and on the power electronics.
More practical reasons might influence which eVTOL configuration will be adopted more rapidly in the future. The multirotor configuration seems to be closer to the market and less complex than the lift + cruise and the electric jet. However, the range advantage of the latter two enables missions impossible to the multirotor configuration.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}