Preliminary Design and System Considerations for an Active Hybrid Laminar Flow Control System


Abstract
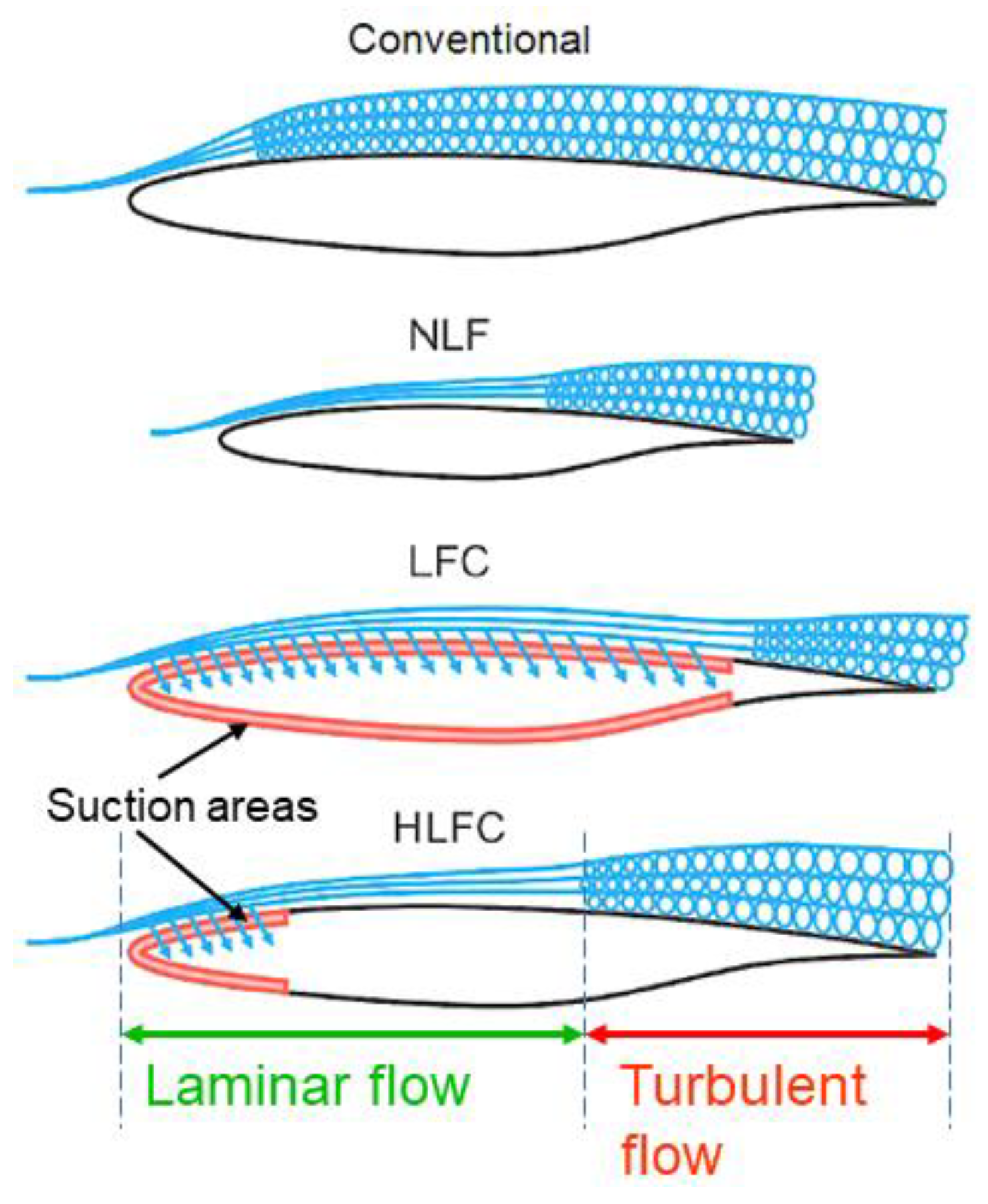
:1. Introduction
2. Requirements, Interfaces, and Assessment Method for Active HLFC Suction System
2.1. Suction System Requirements
- Installation:
- ○
- The size of the compressor + motor arrangement should satisfy system spatial requirements. Space allocation for all suction system equipment needs to be provided.
- ○
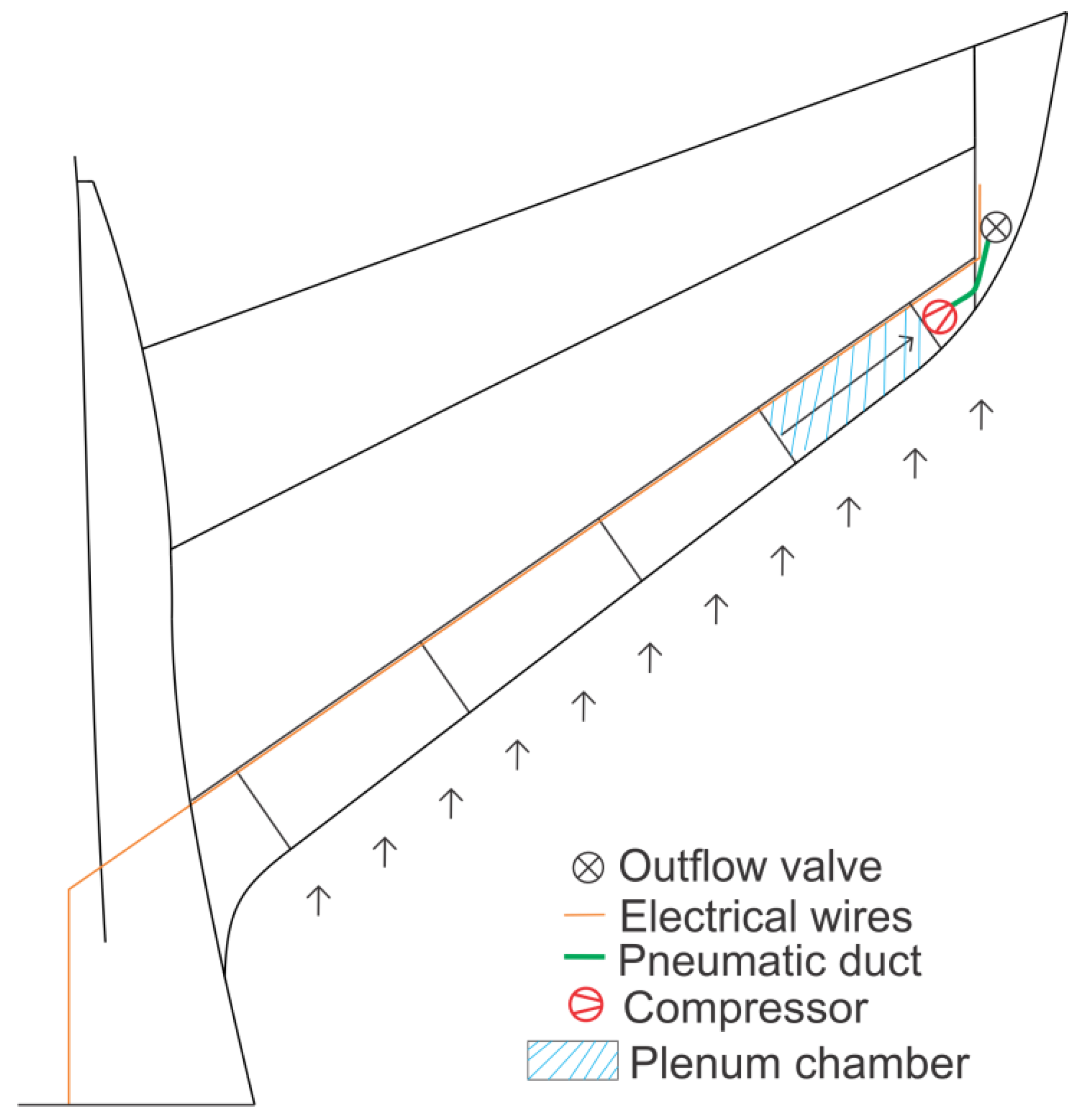
- Routing of electrical cables should be foreseen.
- ○
- External aircraft structural movement shall NOT be affected by installed parts.
- ○
- The suction system should comply with RTCA/DO 160 [11].
- ○
- The suction system shall cope with hail impact.
- ○
- Drainage of fluids shall be ensured.
- Performance:
- ○
- The selected compressor + motor arrangement should satisfy the mass flow and pressure ratio requirements.
- ○
- The compressor + motor arrangement should possess high efficiency, so as to keep power off-takes at a minimum.
- ○
- Large rotor length-to-diameter ratio is desirable for the electric motor, as it minimizes the rotor inertia, thus maximizing the motor acceleration.
- Operational:
- ○
- Abnormal system activities should be detected and indicated.
- ○
- Status monitoring information for pre-flight, in-flight Go/No-Go, and diversion decisions.
- ○
- The suction system should operate within the aircraft operating envelope.
- Safety:
- ○
- Dispatchability with a single failure should be possible.
- ○
- No single failure shall lead to catastrophic conditions (necessary redundancies shall be considered).
- ○
- The HLFC system shall be protected against lightning effects, electro-magnetic interference (EMI), high intensity radiated field (HIRF), and electro-static discharge (ESD).
- ○
- The compressor must have cooling, so that the electric and electronic components do not overheat.
- ○
- Compliance with requirements imposed with Particular Risk Analysis (PRA) needs to be considered.
- ○
- Equipment should have good durability.
- Thermal Requirements for HLFC System Components
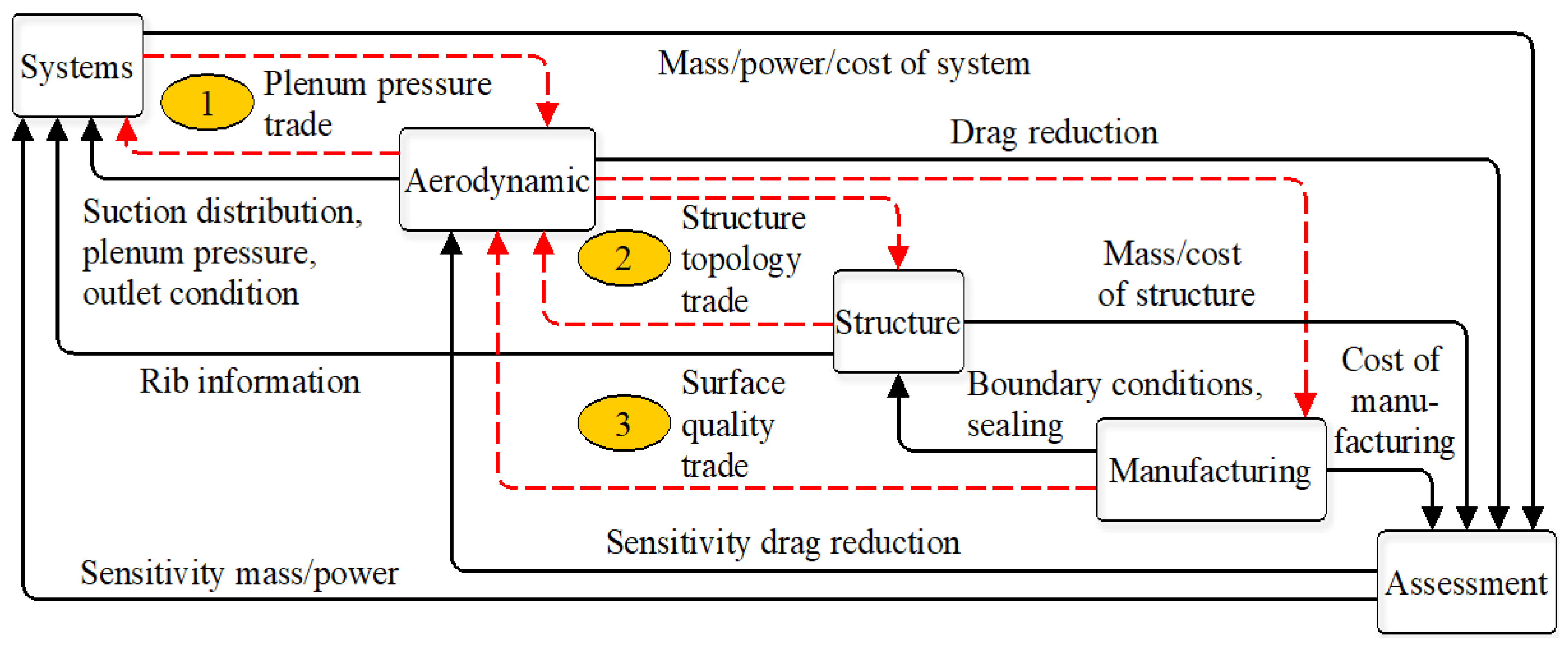
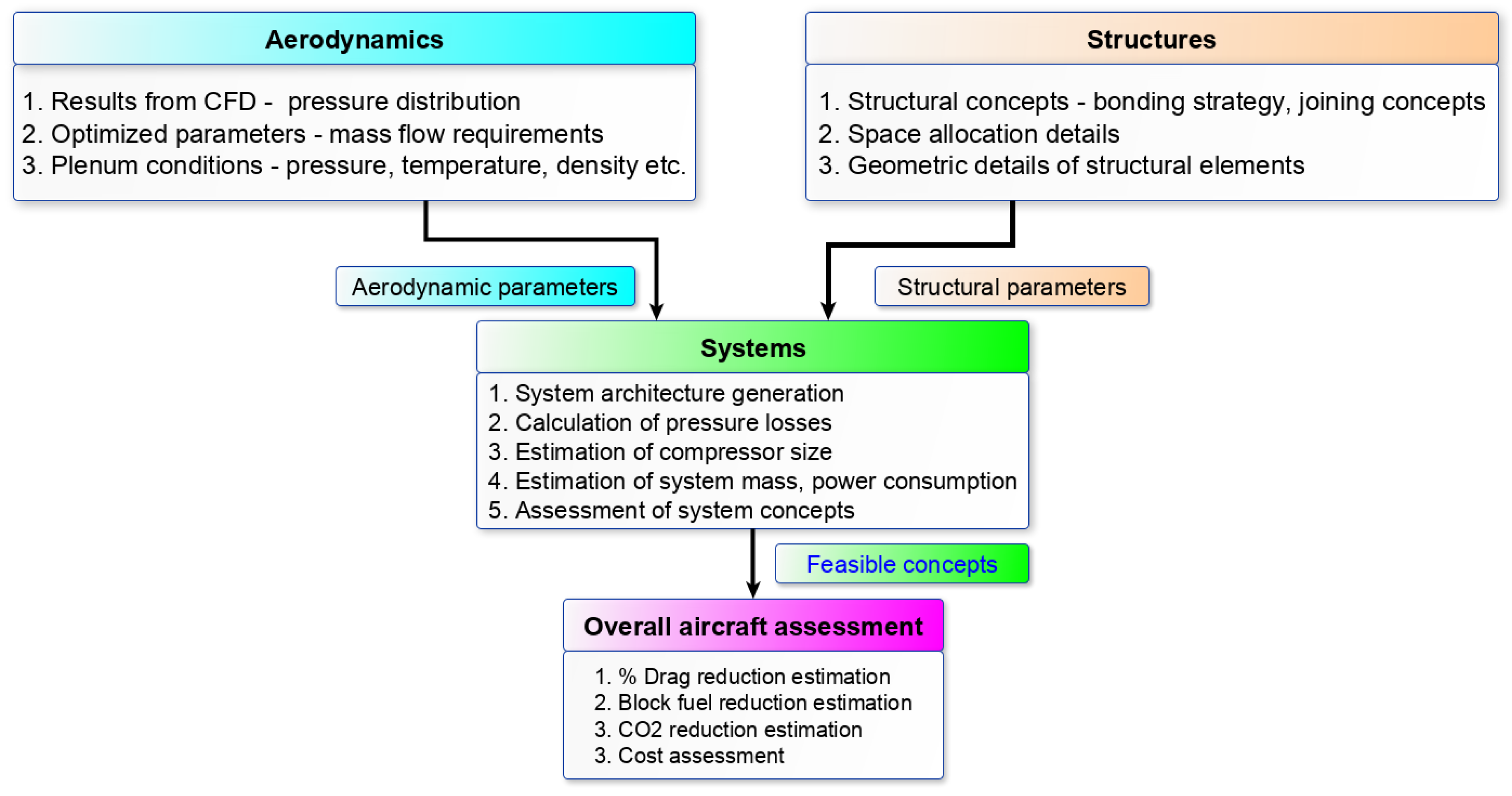
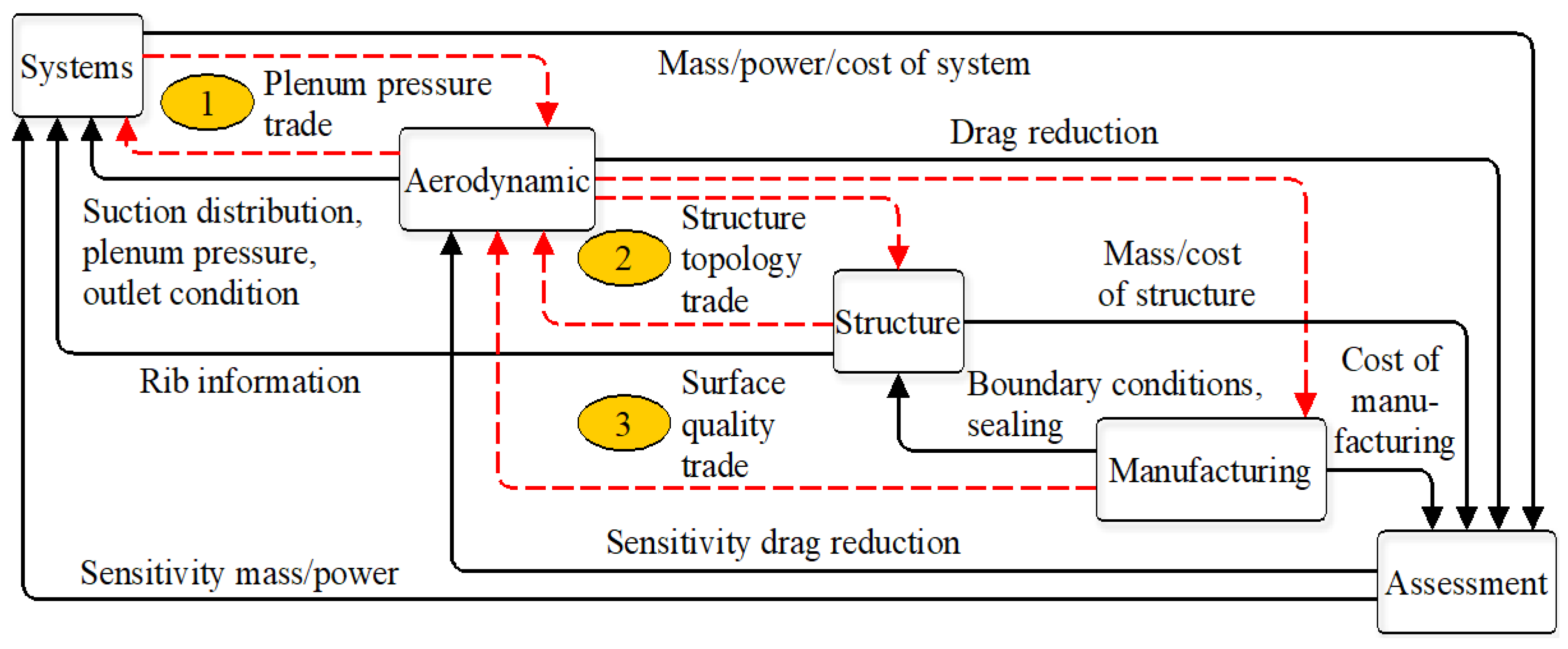
2.2. Interfaces in the HLFC System Design and Assessment Method
- (1)
- Plenum pressure trade—between the systems and the aerodynamics disciplines, the effect of the plenum pressure tolerance has to be evaluated. The effect of a narrower plenum pressure tolerance has to be compared to the additional system cost.
- (2)
- Structure topology trade—between the structure and the aerodynamics disciplines, the structural concepts have to be evaluated. The thickness of the stringers is an important factor for the structural stiffness, as well as for the suction distribution (at structural elements suction is not possible).
- i
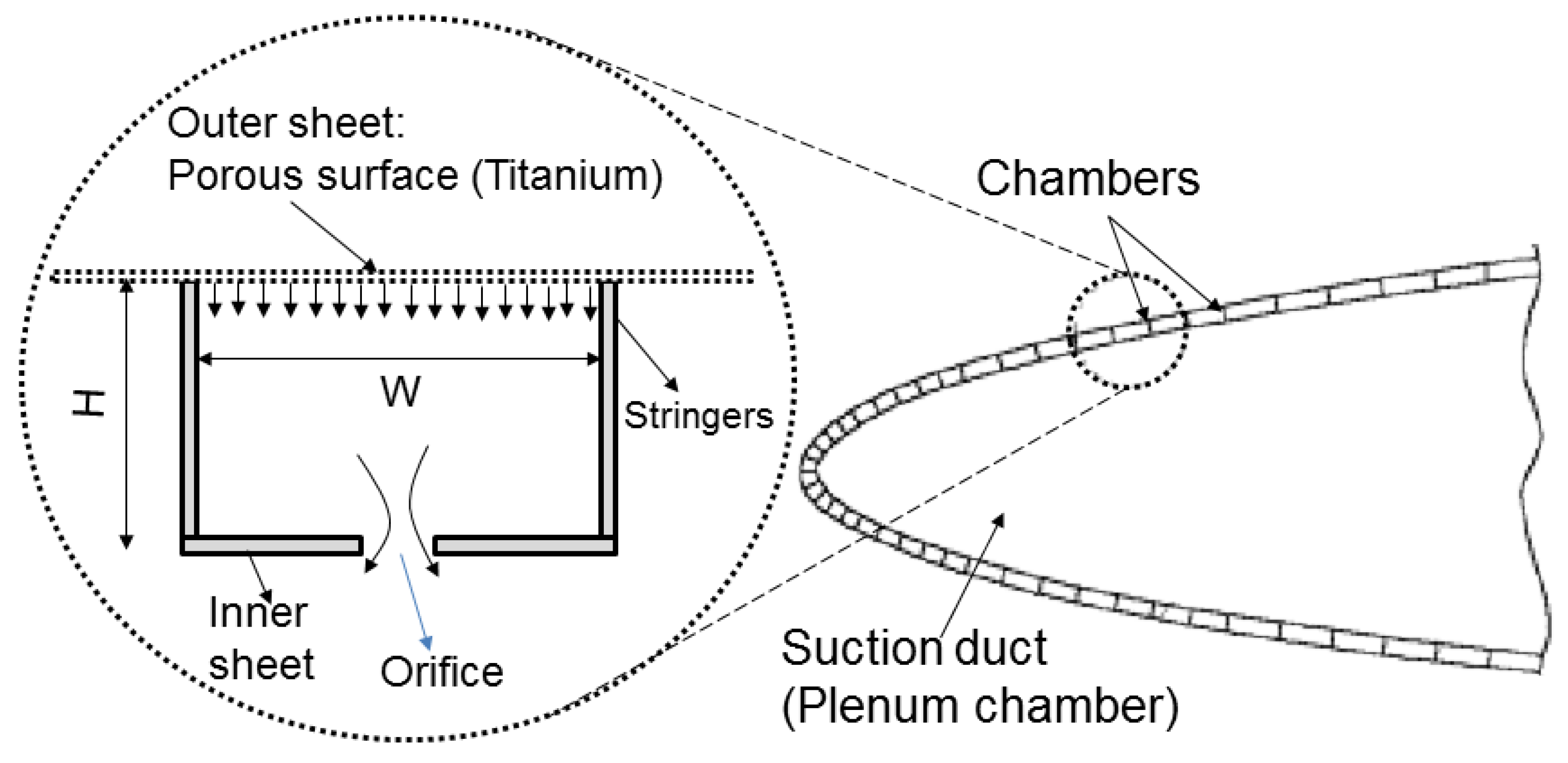
- Chamber layout trade: A trade-off should be made between the aerodynamics, structures, and manufacturing disciplines on the chamber layout (number of chambers, chamber width W, chamber height H). The number of chambers should be optimized, both aerodynamically and structurally. The parameter chamber height H affects the flow velocity through the chambers and stress on the leading edge structure. It also has to be validated for manufacturing feasibility. Finally, a trade-off is required between the throttle orifice diameter and the number of throttle orifices . A change in the chamber layout affects the mass flow rate, and hence the system suction power. The change in mass flow rate after the chamber optimization is given by .
- ii
- Rib structure trade: The ribs are necessary to provide strength and support to the leading edge structure. The choice of the rib structure is a trade between structure, manufacturing, and systems aspects. Most importantly, the bird strike/foreign object impact is the main criterion for the rib structure selection. From experiences gained in the Clean Sky 2 ECHO project, it is seen that the pressure loss due to ribs ( is often negligible. Other than the rib strength, system installation such as routing of electrical harness can be considered as secondary criteria in rib structure selection. Stress effects of ribs on the perforated surface need to be assessed from a manufacturing view-point.
- (3)
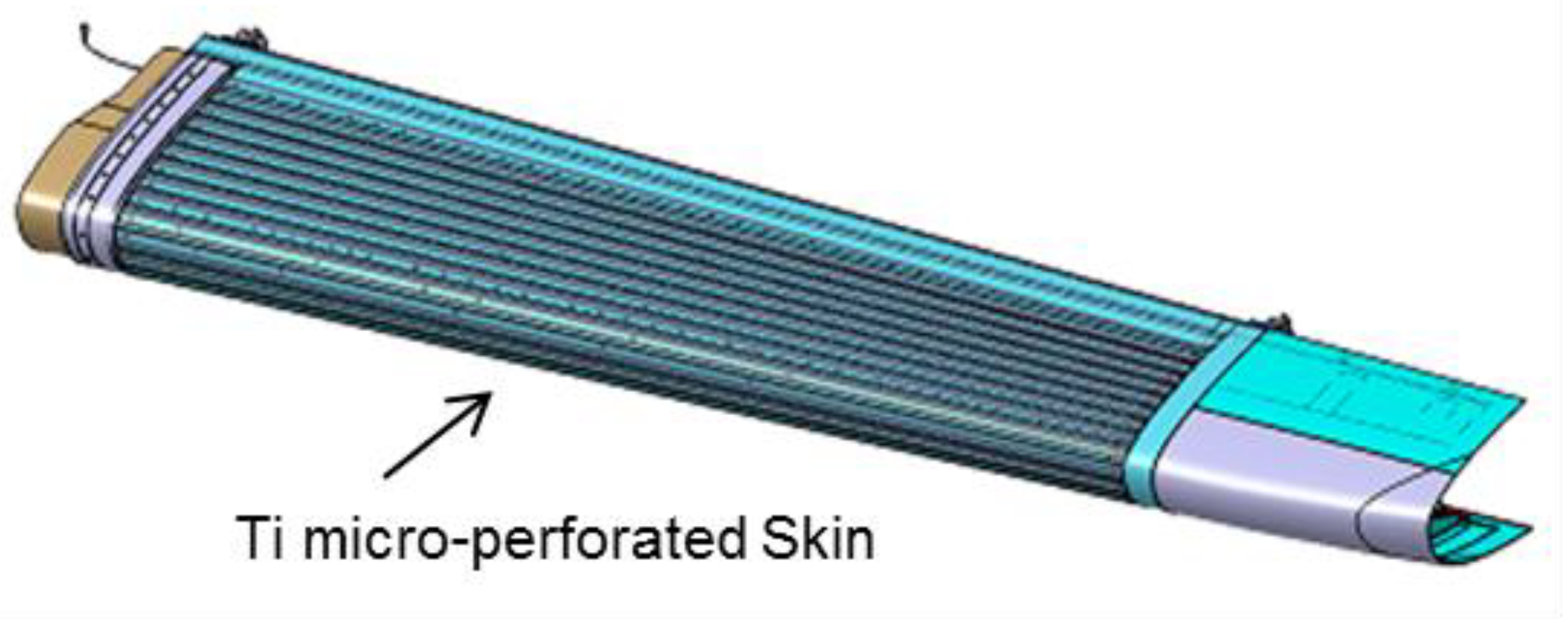
- Surface quality trade—trade studies between the manufacturing of the micro-perforated outer skin and aerodynamic requirements need to be performed. The hole quality, conicity based on the discharge coefficient (), which is the ratio of the actual discharge to the theoretical discharge, and symmetry play an important role in the aerodynamic qualification of the perforated surfaces. Furthermore, requirements for gaps, steps, and overlap need to be traded between economically viable manufacturing methods and aerodynamic constraints.
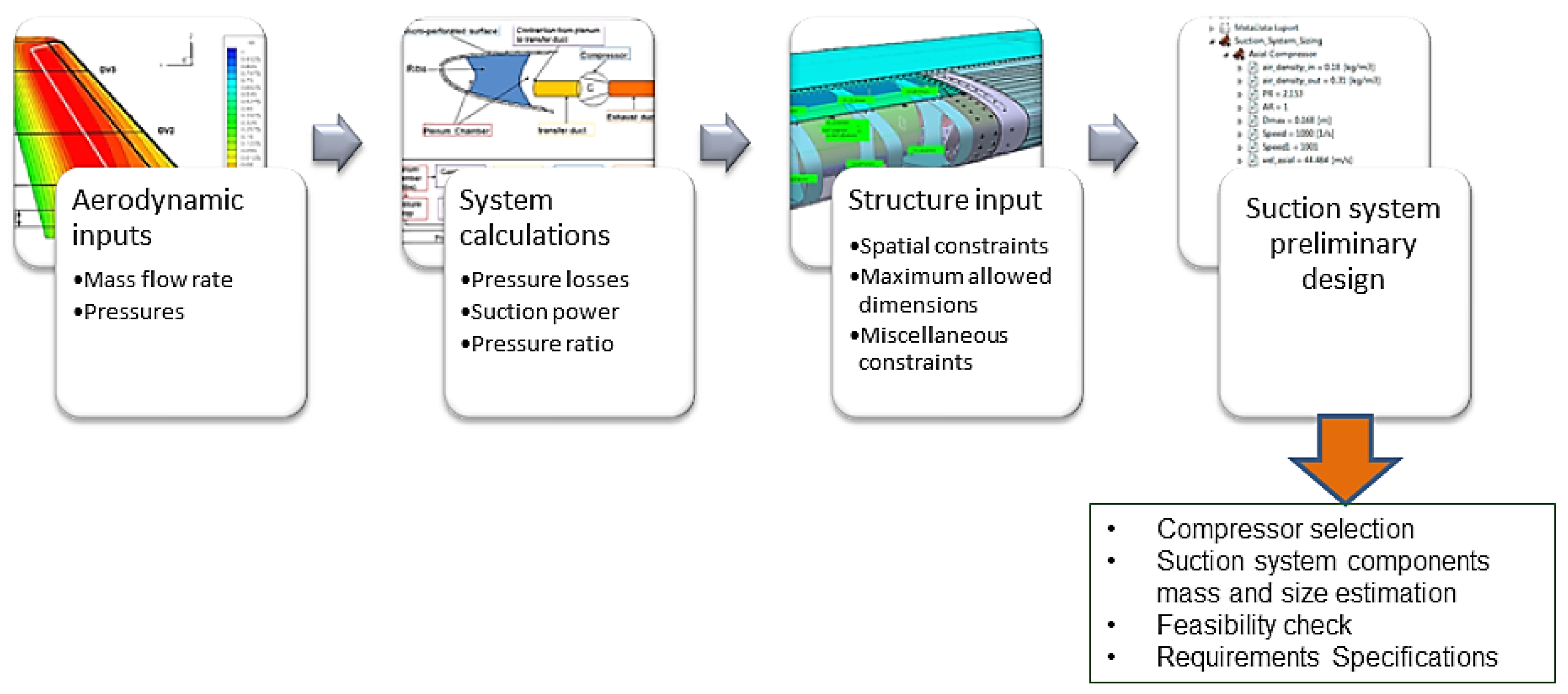
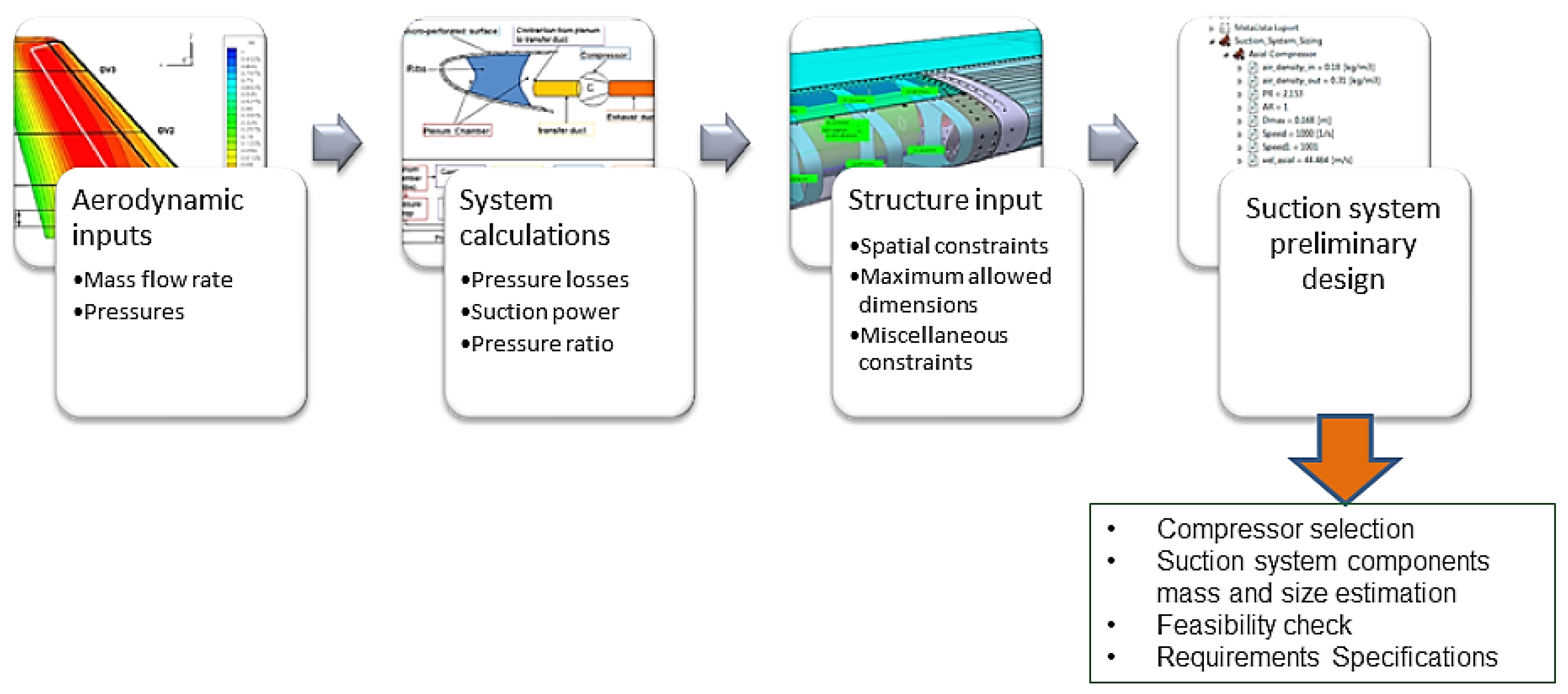
3. Active Suction System Preliminary Design Approach
- The first possibility for the compressor outflow is letting the exhaust gas escape to the outside environment. At this outflow position, the static pressure in the duct must be equal to or greater than the static pressure at the surface to allow the air to flow out of the system.
- The second possibility is connecting the compressor outflow to the engine, adding a bit more thrust to the engines, though this thrust value is very small compared to the jet engines.
- The third possibility for using the compressor outflow is to connect the compressor exhaust gas to the bleed air ducts, which can either be used for environmental control systems or for wing ice protection systems (WIPS). This possibility of connecting the compressor outflow for usage in WIPS could be considered for HLFC applications especially in the wing area, as there is a strong need for icing solutions.
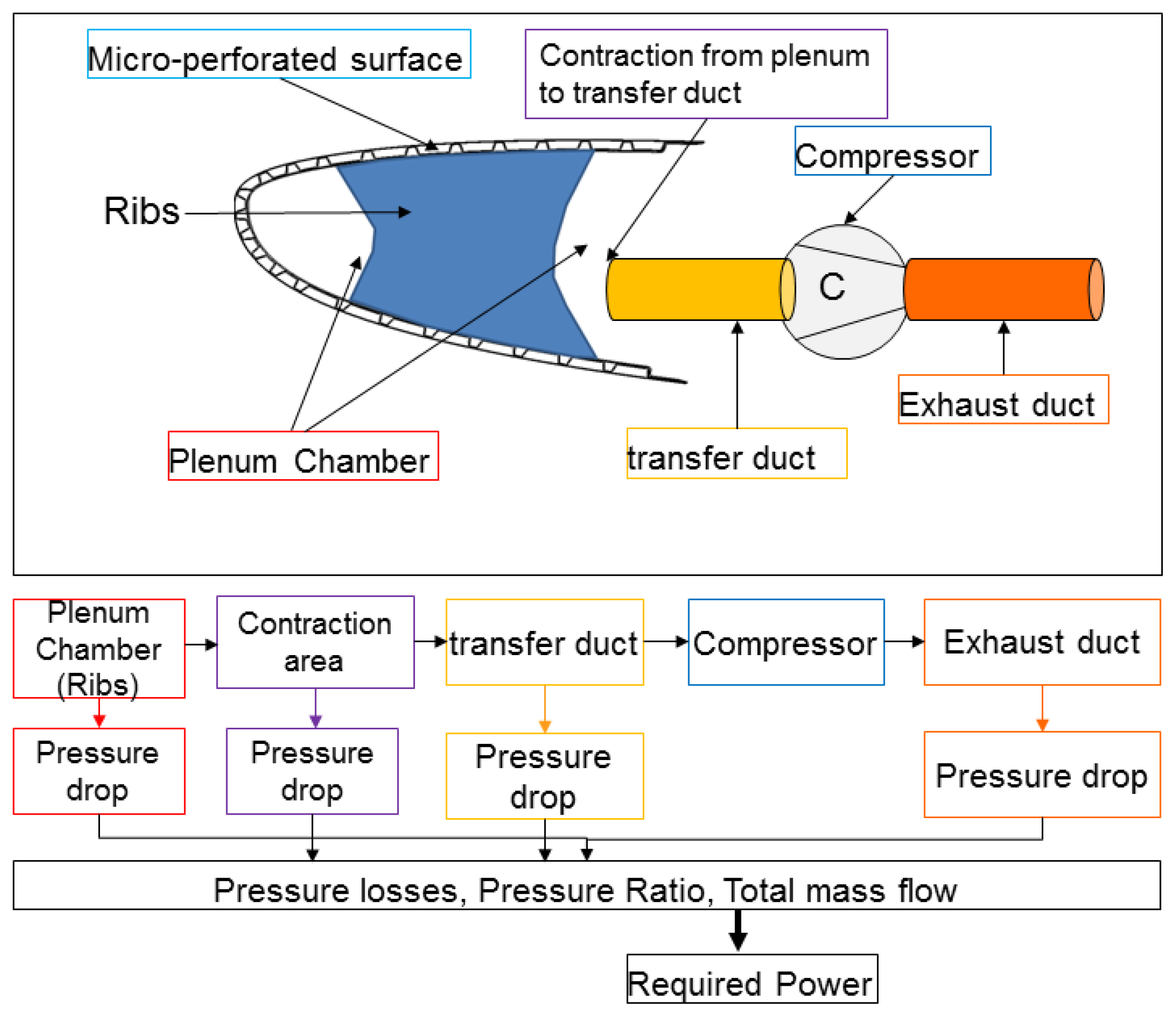
3.1. Suction System Power Consumption Estimation
3.2. Suction System Design and Mass Estimation
- The first possibility is by using an electric compressor driven by a motor.
- The second possibility for an active system is the usage of exhaust air from the aircraft’s environmental control system or the engine bleed air as the motive fluid in a jet pump, also known as suction nozzle or eductor.
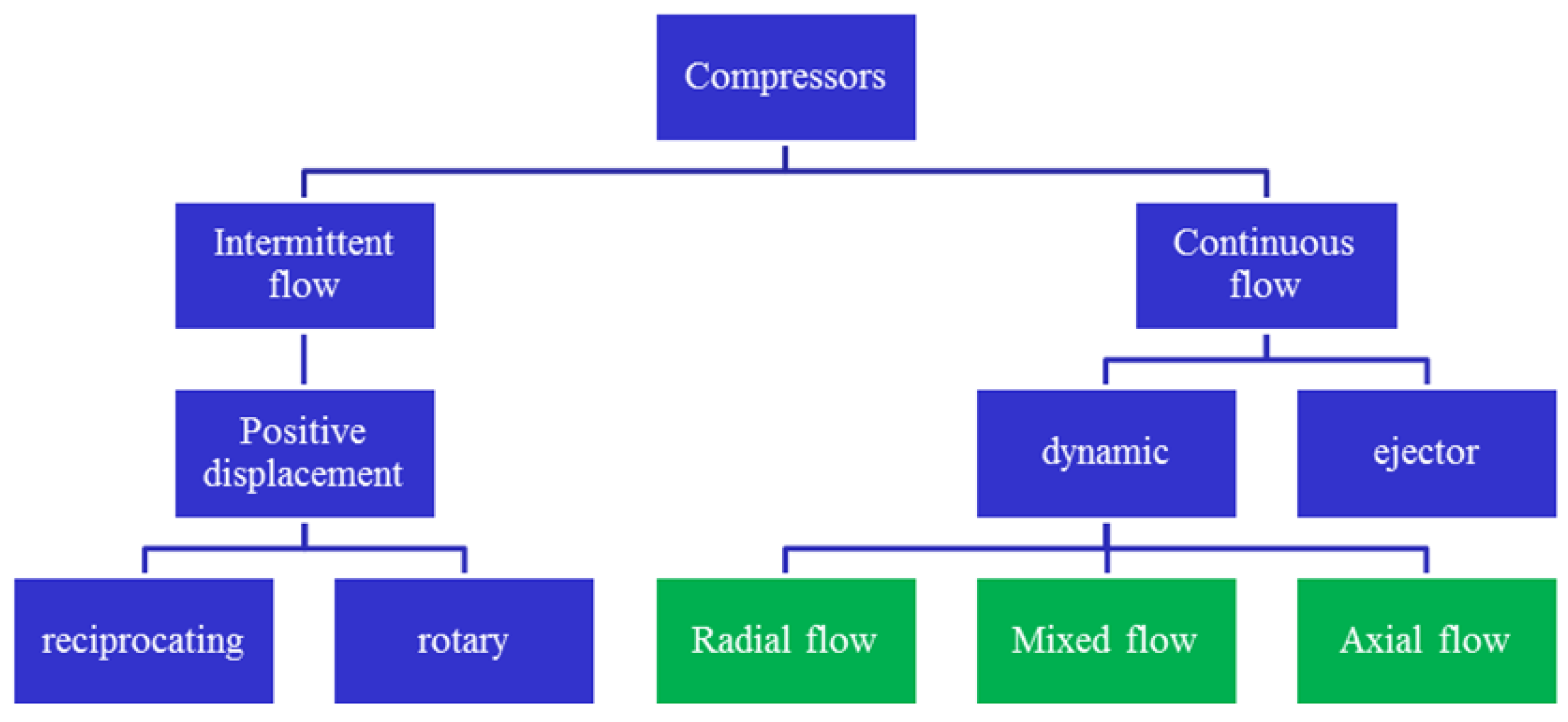
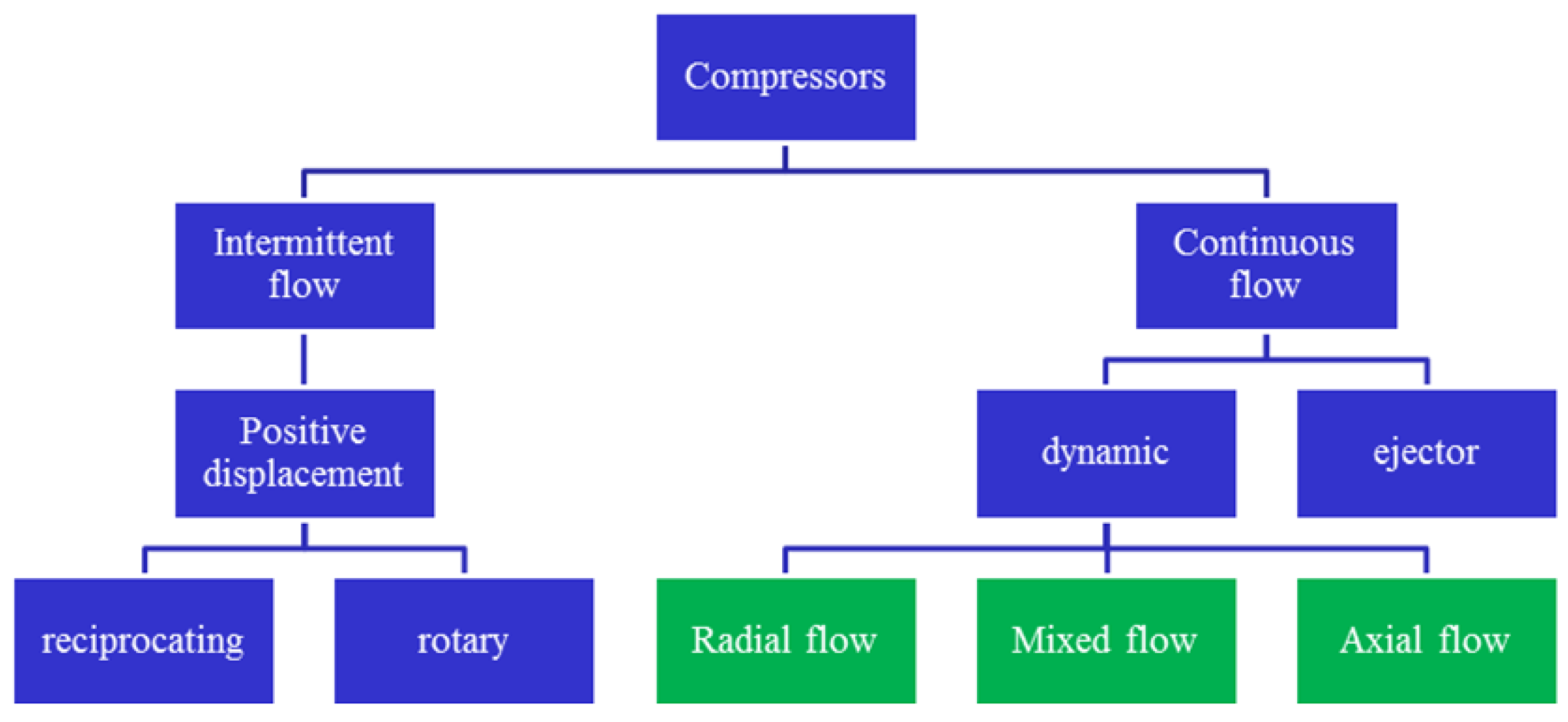
3.2.1. Compressor Preliminary Design and Mass Estimation
- A.
- The compressor and motor type selection; and
- B.
- Sizing and mass estimation of motors and compressors.
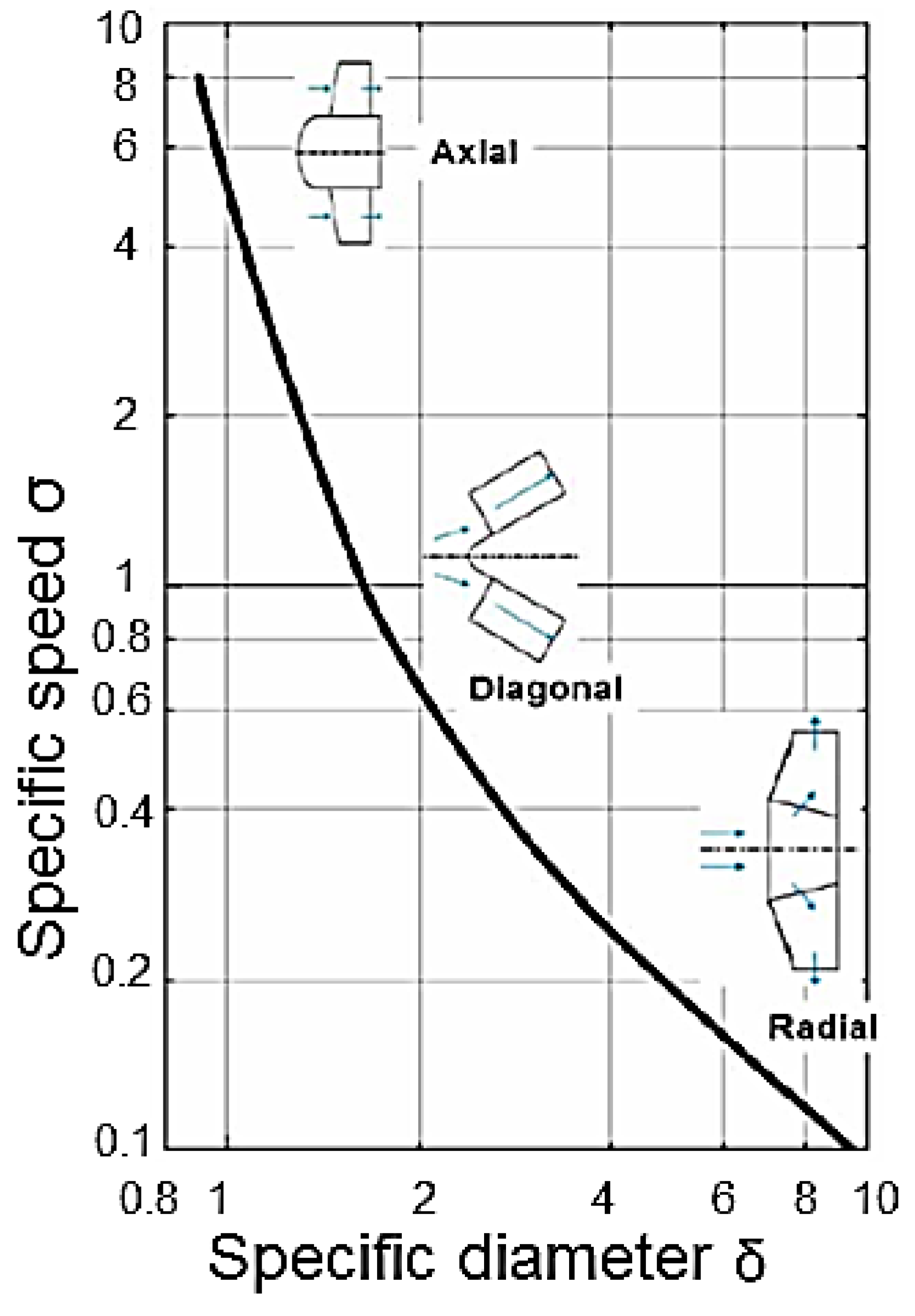
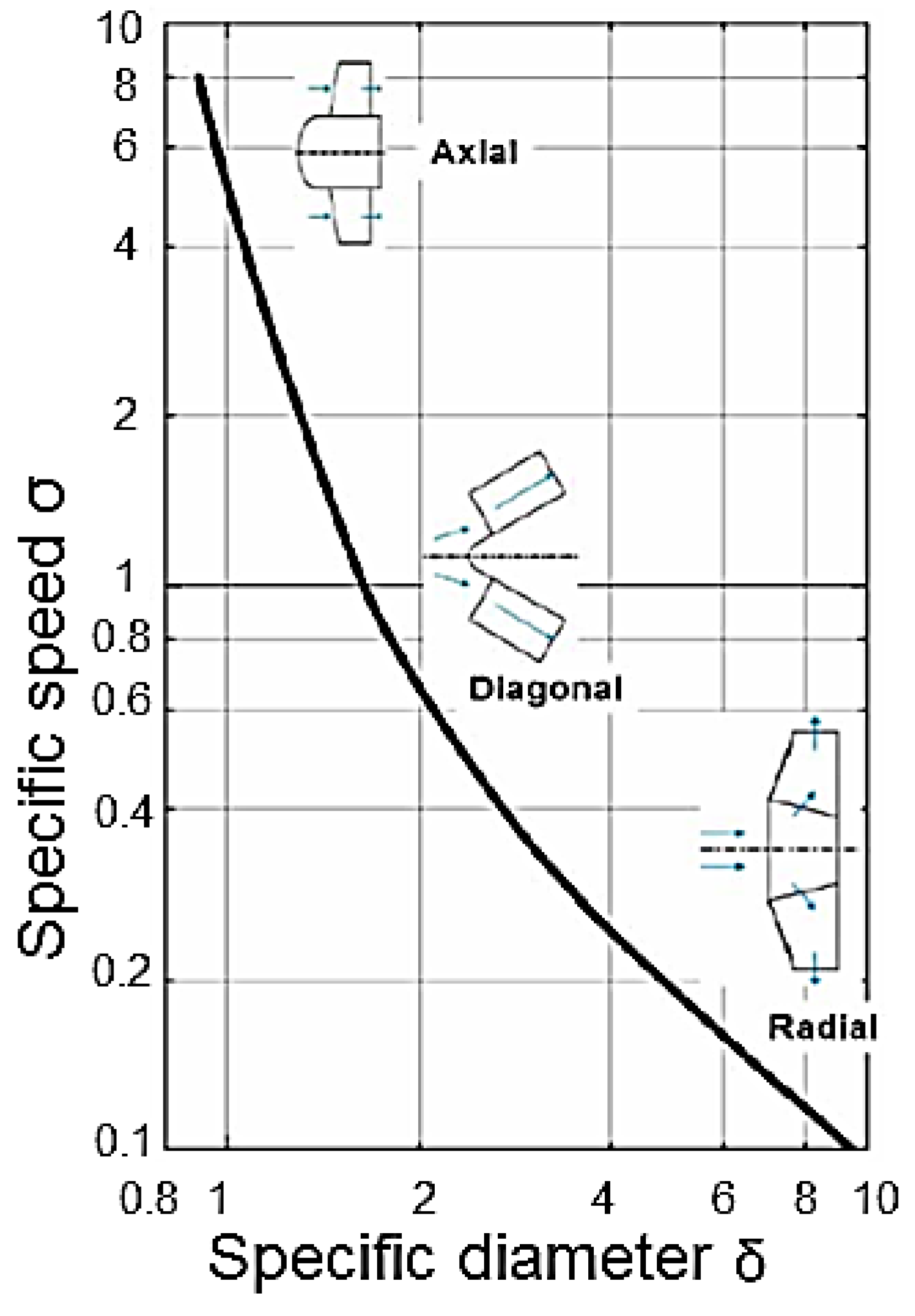
The Compressor and Motor Type Selection
- For, 0.8 < < 2; > 0.8 → Axial compressor is optimal.
- For, 2 < < 4; 0.25 < < 1 → Diagonal compressor is optimal.
- For, > 4; 0.06 < < 0.32 → Radial compressor is optimal.
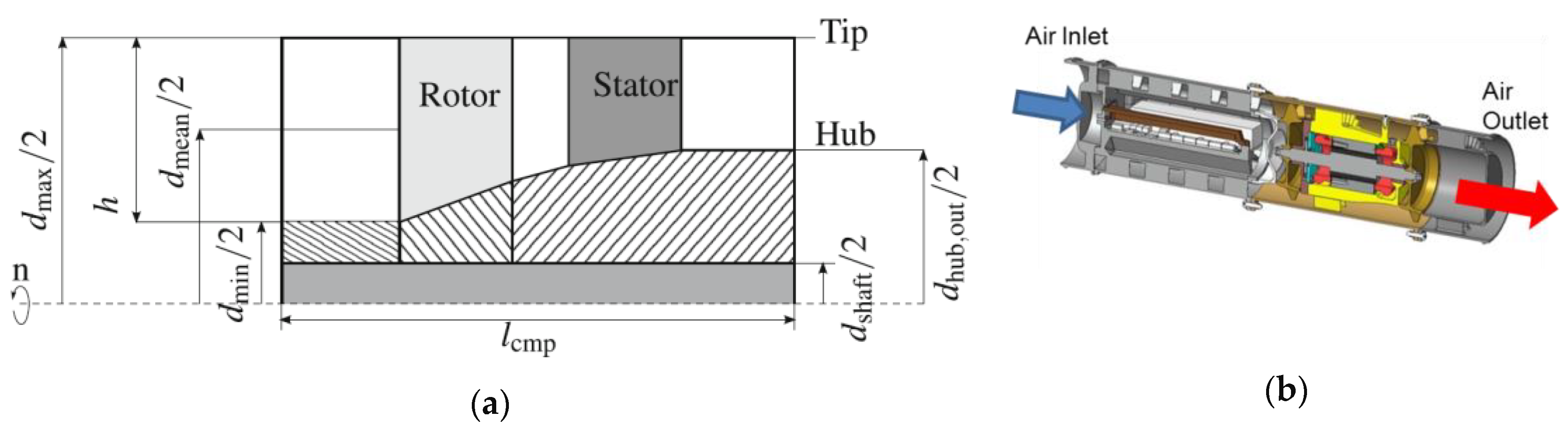
Sizing and Mass Estimation of Motors and Compressors
- i.
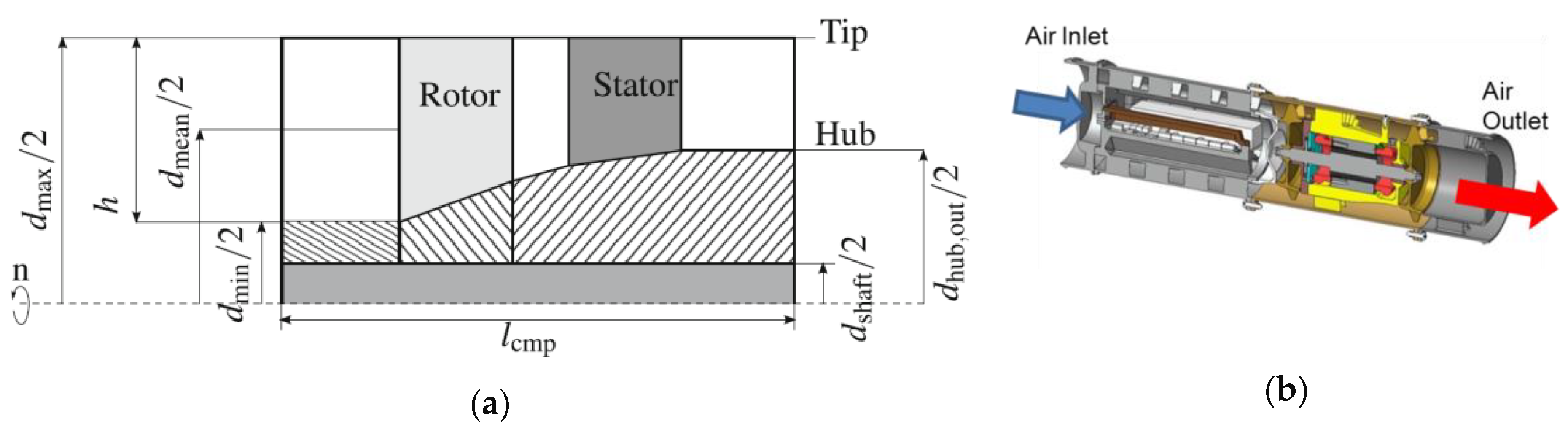
- Axial Compressor Sizing and Mass Estimation
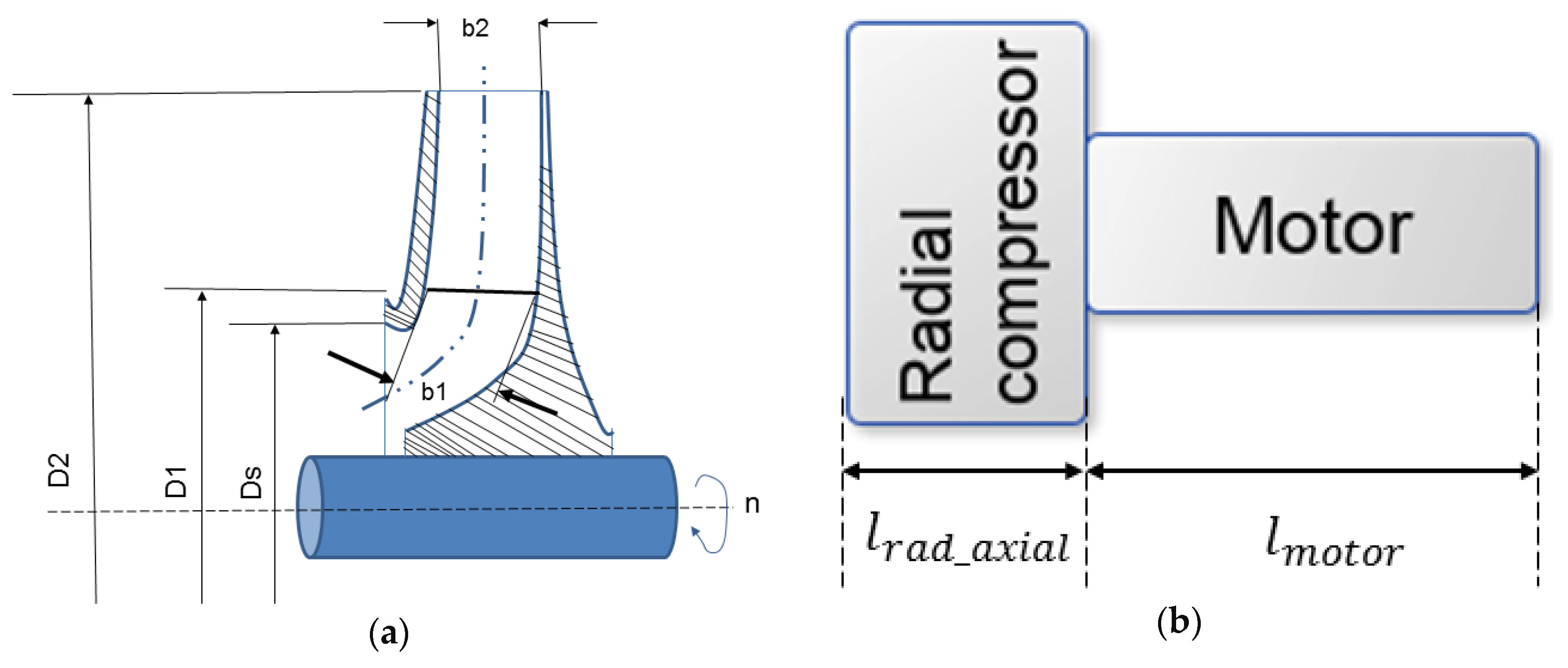
- ii.
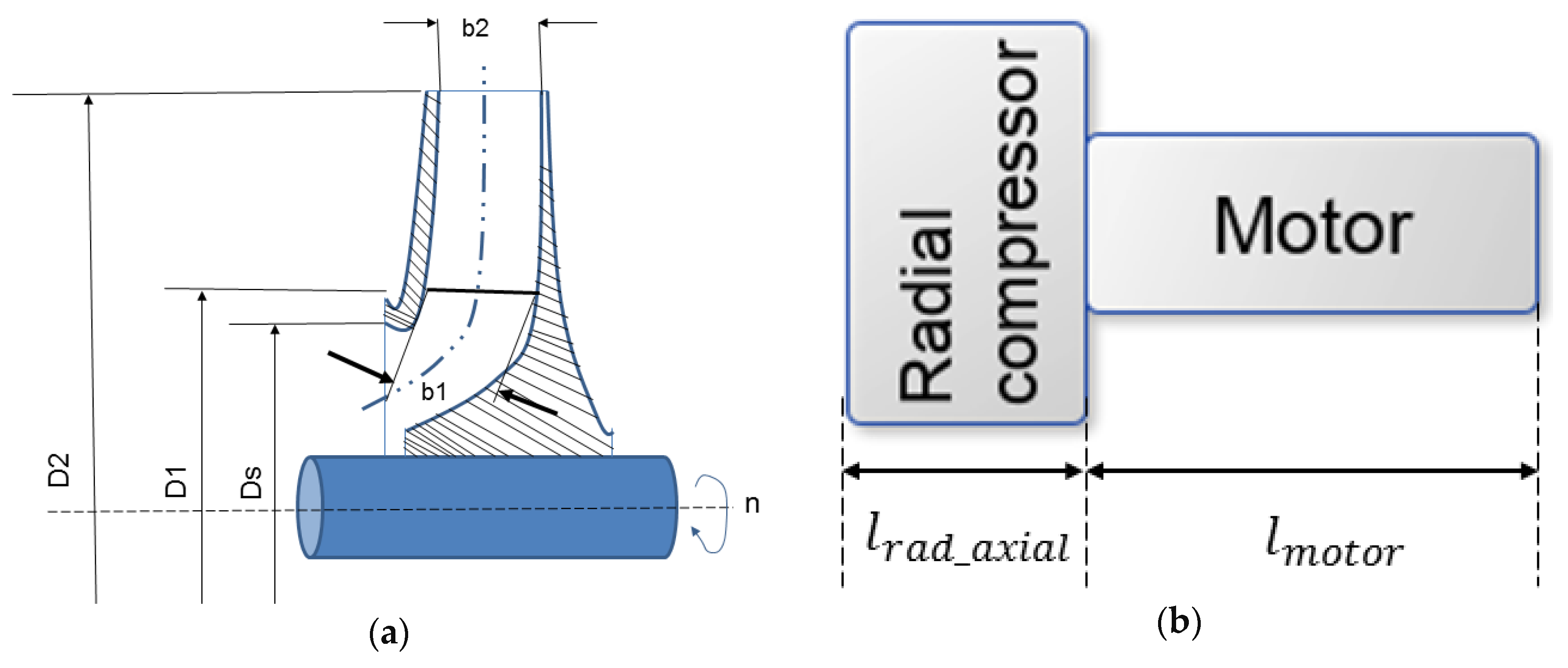
- Radial Compressor Size and Mass Estimation
- iii.
- Motor Selection, Size, and Mass Estimation
- RPM < 50,000–60,000 → Three-phase induction motor.
- RPM > 70,000 → Permanent magnet synchronous motor (PMSM).
3.2.2. Pneumatic Ducts, Converter, and Electrical Harness Mass Estimation
4. Quantitative System Design Case Study with Design Considerations
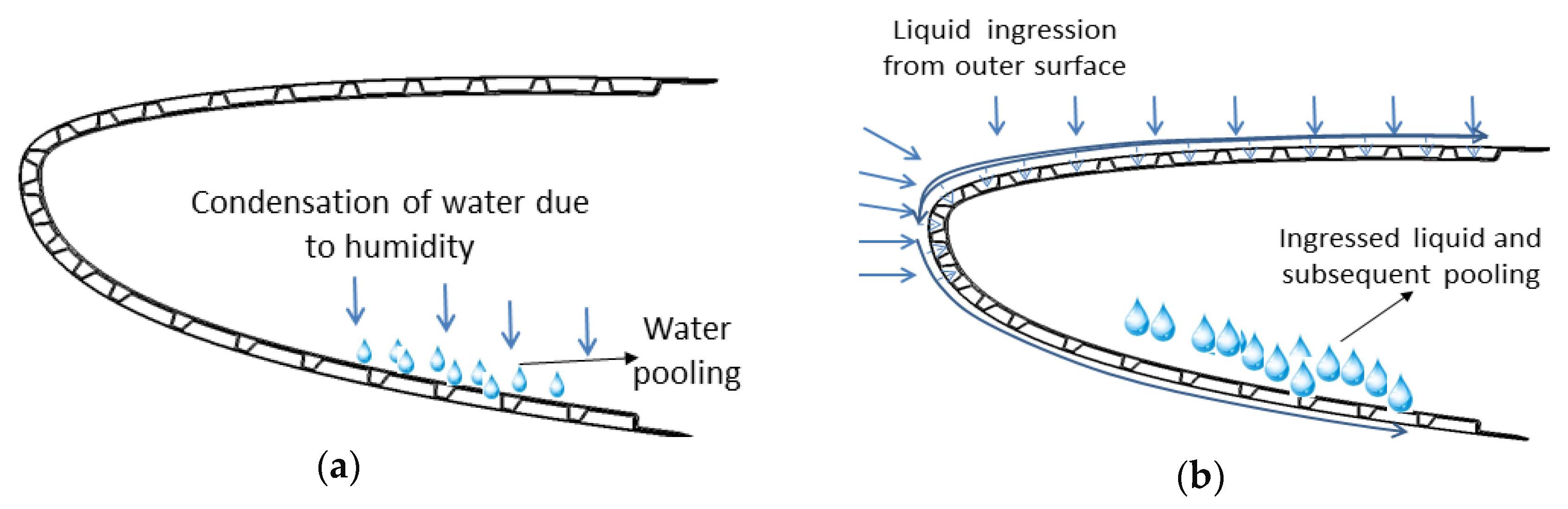
4.1. Water Contamination Avoidance and Its Significance to Suction System Design
- Purging with pressurized air can eliminate pore blockage due to liquid. In purging operation, compressed air is used to unclog the pores. The bleed air for such an operation can be supplied from the engines or through the compressor used for the suction system. The bleed air solution is more challenging due to complexity, mass, and power cost.
- Usage of flapper valves is another possibility to drain water from the plenum. Flapper valves can move liquid from affected segments to non-HLFC segments. However, the complexity of this solution still needs to be assessed.
- The pooled water can be removed by compressor suction and relocated to non-HLFC segments, but this suction will need additional components and add complexity.
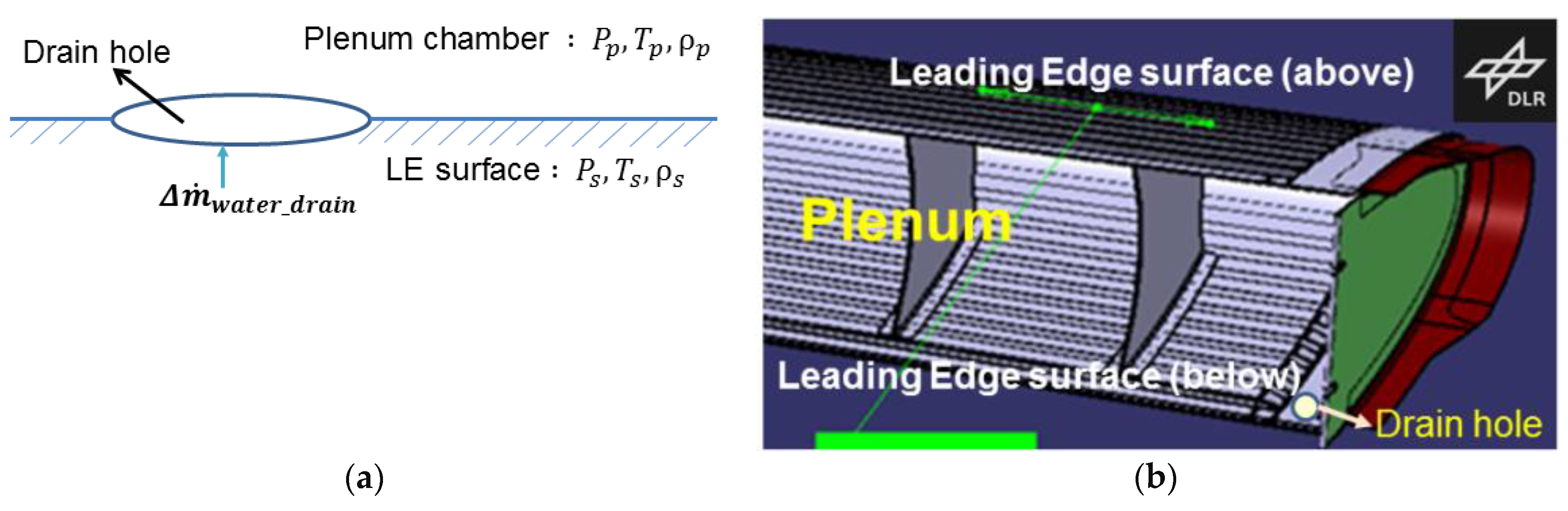
- By using a drain hole in a strategically planned location, the water could be drained out.
4.1.1. Water Amount Estimation
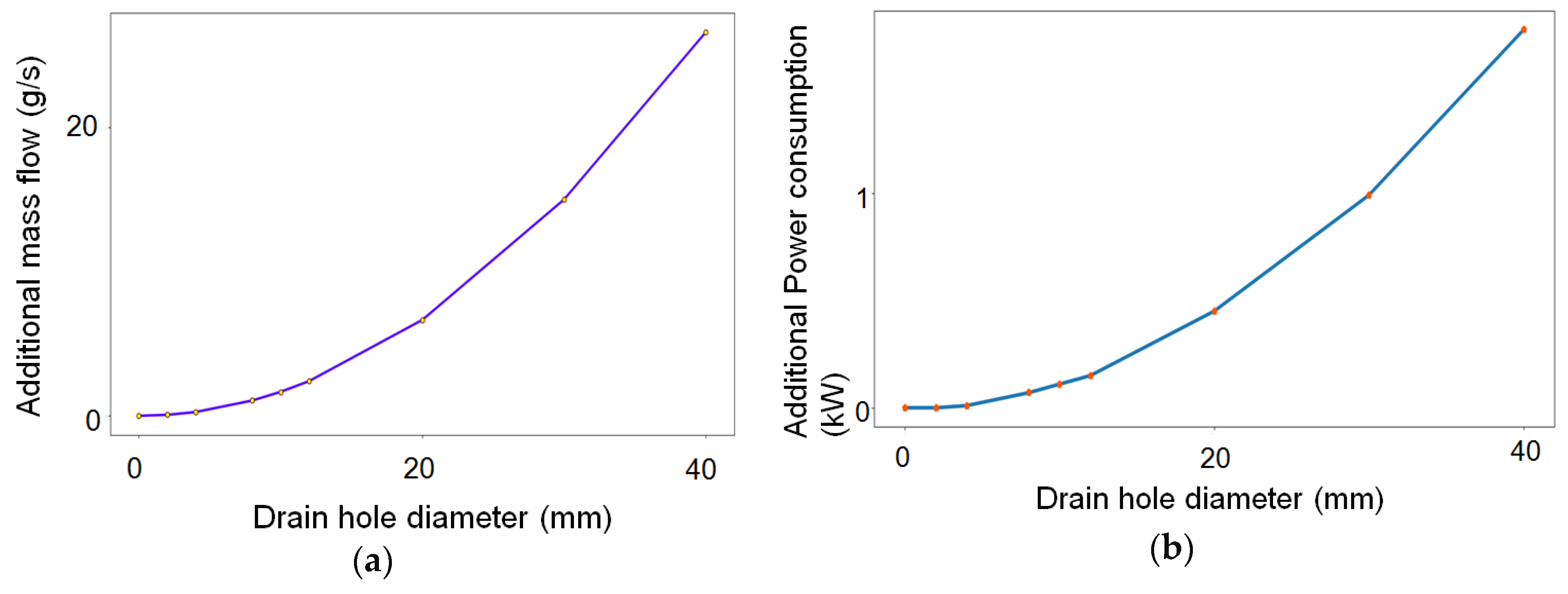
4.1.2. Water Drain Hole Effects Analysis
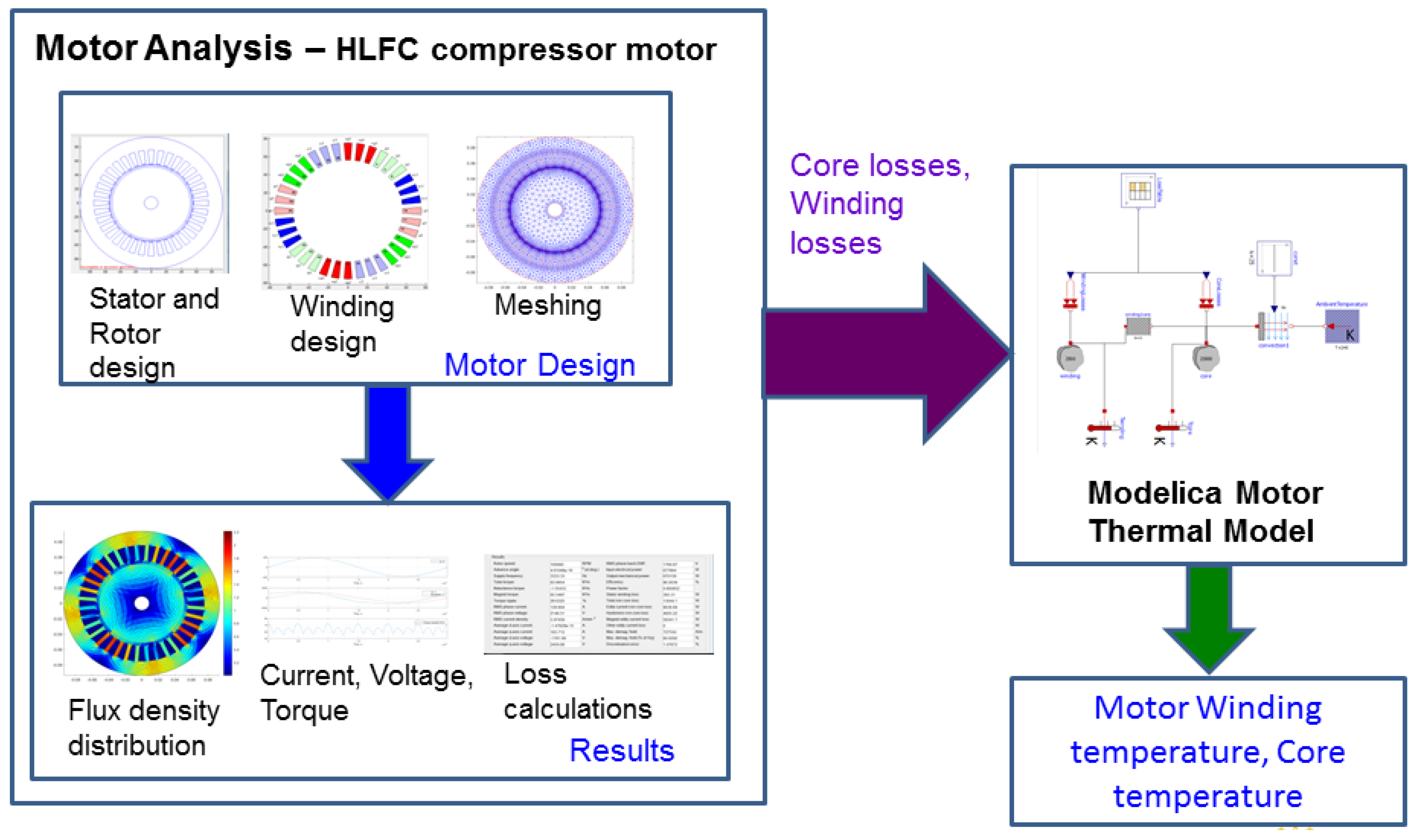
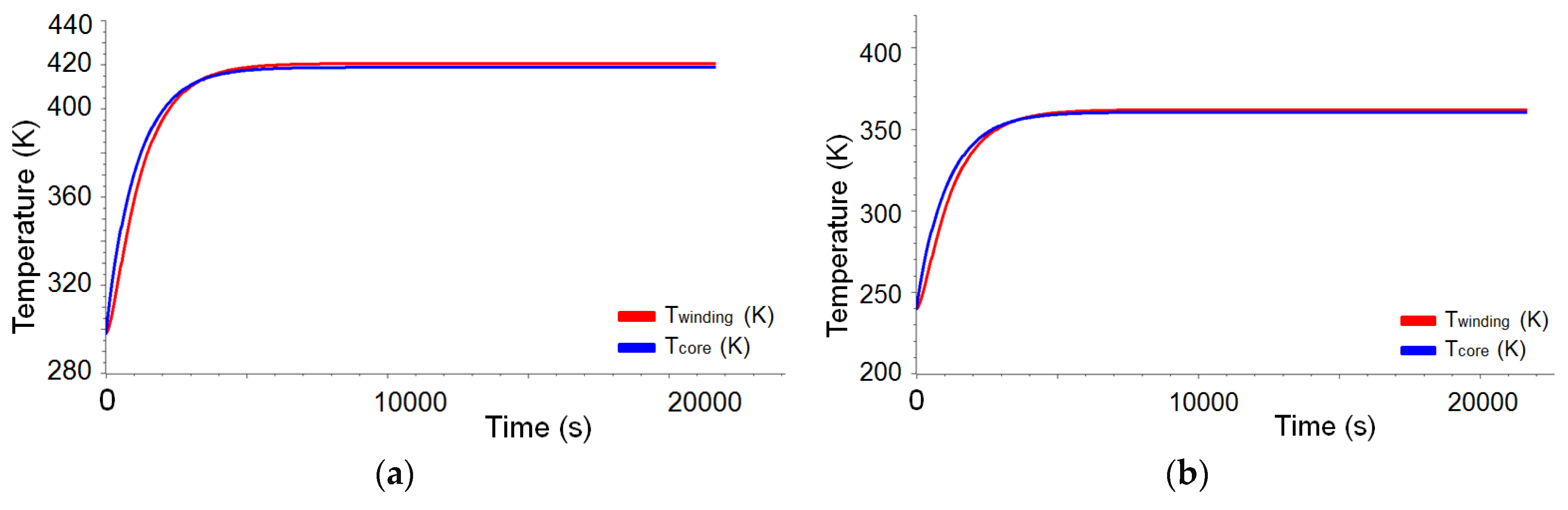
4.2. Thermal Management of Motor
- Copper loss or winding loss : This loss is caused by the winding resistance. In general, it can be mathematically expressed as , where i is the rated current and R() is the winding resistance at temperature measured at temperature .
- Iron core loss : This loss occurs in the magnetic material of the motor and consists of two types:
- ○
- Eddy current loss: In the alternating current (AC) machines, currents get induced in the stator due to the rotating magnetic field according to Faraday’s law, and this induced current (also called eddy currents) dissipates into heat [27].
- ○
- Hysteresis loss: This loss occurs due to the interaction of the changing magnetic fields with the stator iron core, which is subjected to magnetization and demagnetization.
5. Discussion and Conclusions
- While assessing the concepts, it is also important to consider solutions for other system issues, such as water drain from the plenum and optimized chamber layout for suction in the leading edge. These aspects result in additional mass flow into the plenum, hence the compressor preliminary design process should consider these issues as well. A simple drain hole solution is proposed in the paper; however, to check for the effectiveness of this solution, it should be tested in a ground-based demonstrator.
- Thermal management and fire protection of the suction system components is an important safety and certification requirement, and hence need to be considered in the early stages of system development. Proper cooling solutions need to be identified for the HLFC system components. It is advisable to perform multi-physics thermal simulation of the compressor and to test the complete HLFC suction system in a demonstrator in simulated flight conditions to check for functionality and effectiveness of the proposed cooling solution.
- The exact location of the compressor exhaust in the aircraft should be known prior to concept assessment. Based on the location, the outflow pressure will be different and cause considerable changes in mass and power consumption. The location should be optimized in synergy with other involved disciplines. It is suggested that the location of the exhaust should be chosen so as to not cause any considerable flow changes over the airfoil, and the blow from the exhaust should not induce a humid atmosphere in the vicinity and affect nearby systems.
- The design of an HLFC system on a wing should be performed in coordination with the wing ice protection system (WIPS) and structural design, so that the optimal location for suction system concepts and the compressor exhaust can be allocated.
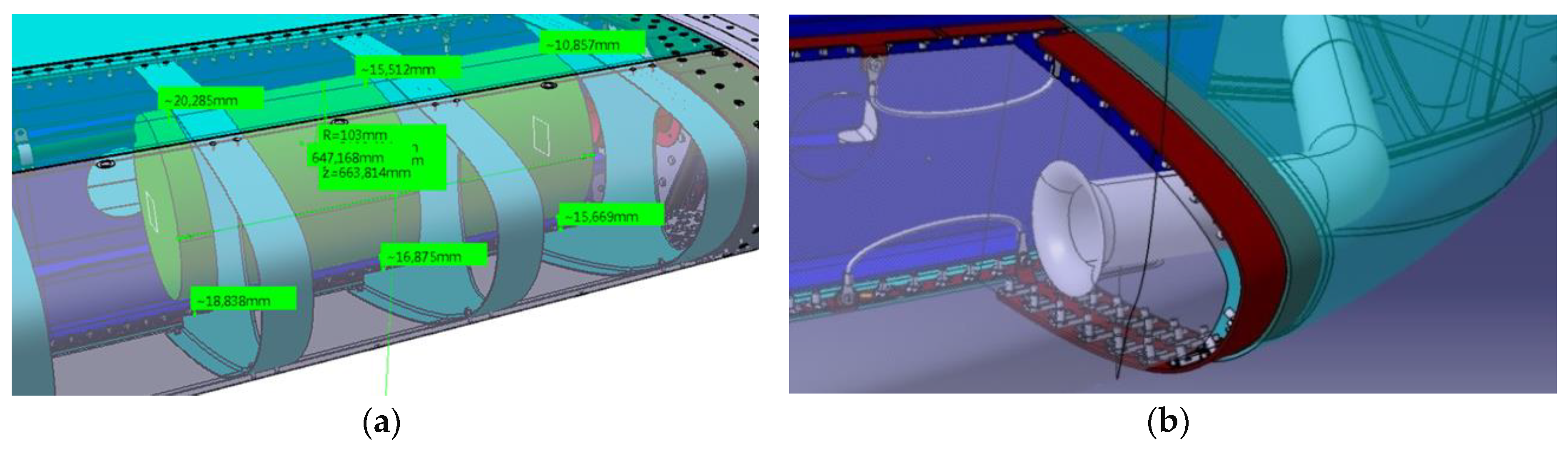
- All potential concepts should be simultaneously checked in the digital mock-up to ascertain if it is feasible in the early stages. This saves developmental costs. It is also necessary to consider the manufacturing feasibility of the proposed concept, and the same should be discussed with the suppliers.
- High efficient compressors are required for HLFC, especially in low Reynolds number flows, since they are operated at very high altitudes.
- The motor needs to be durable and should not get overheated, and require simple, innovative, and cost-effective cooling solutions.
- The PMSM motors need to use quality permanent magnets with high Curie temperature, with less probability for demagnetization; hence, proper materials need to be selected and researched for such magnets to be used for HLFC applications.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| A | Surface area (m2) |
| Ampere conductor per meter of the armature periphery | |
| Compressor inlet area | |
| AR | Aspect ratio of the axial compressor |
| Aspect ratio of the motor | |
| Vane inlet width for radial compressor (m) | |
| Vane outlet width for radial compressor (m) | |
| Average value of flux density in the airgap (Wb/m2) | |
| Discharge coefficient (ratio of actual discharge to theoretical discharge) | |
| Vane inlet diameter of radial compressor (m) | |
| Impeller exit diameter (m) | |
| Hydraulic diameter (m) | |
| Armature diameter or stator bore inner diameter (m) | |
| Maximum diameter of the axial or radial compressor (m) | |
| Minimum diameter of the axial compressor (m) | |
| Stator bore outer diameter (m) | |
| Cross sectional area (m2) | |
| Free surface area of the ribs (m2) | |
| Total surface area of the ribs (m2) | |
| Height of stator and rotor blade of axial compressor (m) | |
| Motor space factor | |
| Shaft power factor (N/W) | |
| Winding factor | |
| Stator core length (m) | |
| Length (m) | |
| Mass (kg) | |
| Mass flow (g/s) | |
| Synchronous speed in RPS | |
| P | Number of poles of the motor |
| Compressor power (kW) | |
| Drive/electrical power (kW) | |
| Dynamic pressure at compressor outlet (Pa) | |
| Isentropic suction power (kW) | |
| Pressure at compressor inlet (Pa) | |
| Pressure at compressor outlet (Pa) | |
| Static pressure near exhaust port (Pa) | |
| Outlet Static pressure (Pa) | |
| R | Specific gas constant for dry air (J/kg/K) |
| T | Temperature (K) |
| u | Circumferential velocity of axial compressor rotor (m/s) |
| Velocity of the air in the duct (m/s) | |
| Axial velocity component of the axial compressor (m/s) | |
| Volumetric flow rate (m3/s) | |
| Specific energy (J/kg) | |
| Power factor—ratio of real power (kW) to the absorbed power (kVA) | |
| Pressure loss due to contraction (Pa) | |
| Pressure loss due to ribs (Pa) | |
| Pressure loss due to ducts (Pa) | |
| Ratio of specific heats | |
| Specific diameter | |
| Clearance factor | |
| Resistance coefficient of the duct | |
| Resistance coefficient of the ribs | |
| Duct/pipe friction coefficient | |
| Efficiency | |
| φ | Relative humidity |
| Flow coefficient | |
| Density of air (kg/m3) | |
| Specific speed | |
| Pressure coefficient | |
| τ | Thickness (m) |
| Subscript | |
| 0 | Condition before contraction |
| 1 | Condition after contraction |
| a | Axial velocity component |
| axial | Axial compressor |
| axial_gap | Axial gap (distance between stator and rotor in axial compressor) |
| blade | Blade of axial compressor stator and rotor |
| casing | Casing of the compressor (axial or radial) |
| exhaust | Condition in the exhaust duct |
| hub | Hub of axial compressor |
| impeller | Impeller of radial compressor |
| in | Inlet conditions |
| motor | Motor part of the compressor |
| out | Outlet conditions |
| plenum | Condition in the plenum |
| radial | Radial compressor |
| rad_axial | Axial length of radial compressor |
| rotor | Rotor of the axial compressor |
| shaft | Shaft of the axial compressor |
| stator | Stator of the axial compressor |
| transfer | Condition in the transfer duct |
Appendix A
Compressor Outlet Conditions Estimation
- Pressure at compressor inlet
- Inlet air density
- Inlet temperature
- Flow velocity/velocity of air at the inlet duct
- Surface pressure near the chosen exhaust port (from aerodynamic results)
- The Mach number for the duct is reduced to 0.2 (critical Mach number) for reducing power consumption and to limit the velocity of air inside duct.
- The density at the exhaust duct is unknown, so with an assumed pressure ratio (aPR), several iterations are performed to estimate the density of air in the exhaust duct.
- Step 1: Start with an assumed pressure ratio (aPR).
- Step 2: Calculate the outlet static pressure using aPR:
- Step 3: Calculate the dynamic pressure at outlet using the inlet duct air density:
- Step 4: Calculate the total outlet pressure:
- Step 5: Calculate the new air density for the calculated total pressure using isentropic relations:
- Step 6: Calculate the new velocity of flow at the outlet for Ma = 0.2:where
- Step 7: Calculate new dynamic pressure () on the exhaust duct based on new density according to Equation (A2).
- Step 8: Calculate new total pressure () = + .
- Step 9: Calculate difference: ΔP = − .
- Step 10: Repeat steps 1 to 9 until ΔP < 1 × 10−5.
Appendix B
Axial Compressor Size and Mass Estimation
- Inlet air density
- Outlet/Exit air density
- Mass flow rate requirements through the duct
- Estimated rotational speed in revolutions per minute N
- Pressure Ratio (PR)—estimated based on the pressure loss calculation
- The density value of the various compressor parts depends on the material chosen
Appendix C
Radial Compressor Size and Mass Estimation
- Inlet air density
- Outlet/Exit air density
- Mass flow rate requirements through the duct
- Estimated rotational speed in revolutions per minute N
- Pressure Ratio (PR)—estimated based on the pressure loss calculation
- The density value of the various parts of compressor depends on the material chosen
- Volumetric efficiency
- n—angular velocity in rotations per second (1/s)
- Y—Specific energy transfer (J/kg)
- —Pressure coefficient
- —flow co-efficient
- Sigma—specific speed
- Beta1—Impeller blade angle at inlet
- ○
- Optimal is 30° [22]
- Beta2—Impeller blade angle at outlet [22]
- ○
- = 30° when z = 12
- ○
- = 45° to 60°, when z = 16
- ○
- = 70° to 90°, when z = 17 to 20
References
- Krishnan, K.S.G.; Bertram, O.; Seibel, O. Review of hybrid laminar flow control systems. Prog. Aerosp. Sci. 2017, 93, 24–52. [Google Scholar] [CrossRef]
- Robert, J.P. Drag Reduction: An Industrial Challenge; Agard Report 786 Special Course on Skin Friction Drag Reduction: Neuilly Sur Seine; Airbus Industrie Blagnac: Blagnac, France, 1992. [Google Scholar]
- Joslin, R.D. Overview of Laminar Flow Control; NASA/TP-1998-208705; NASA: Hampton, VA, USA, 1998.
- Young, T.M. Investigations into the Operational Effectiveness of Hybrid Laminar Flow Control Aircraft. Ph.D. Thesis, School of Engineering, Cranfield University, Cranfield, UK, 2002. [Google Scholar]
- Boeing Inc. Hybrid Laminar Flow Control Study Final Technical Report; NASA Contractor Report 165930; NASA: Hampton, VA, USA, 1982.
- Schrauf, G.; Horstmann, K.H. Simplified Hybrid Laminar Flow Control. In Proceedings of the European Congress on Computational Methods on Applied Sciences and Engineering (ECCOMAS 2004), Jyväskylä, Finland, 24–28 July 2004. [Google Scholar]
- Krishnan, K.S.G.; Bertram, O. Assessment of a Chamberless Active Hybrid Laminar Flow Control System for the Vertical Tail Plane of a Mid-Range Transport Aircraft. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK 2017), Munich, Germany, 5–7 September 2017. [Google Scholar]
- Jabbal, M.; Everett, S.; Krishnan, K.S.G.; Raghu, S. A Comparative Study of Hybrid Flow Control System Architectures for an A320 Aircraft. In Proceedings of the 8th AIAA Flow Control Conference, AIAA AVIATION Forum, (AIAA 2016-3928), Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Pe, T.; Thielecke, F. Synthesis and Topology Study of HLFC System Architectures in Preliminary Aircraft Design. In Proceedings of the 3rd CEAS Air&Space Conference, Venice, Italy, 24–28 October 2011; pp. 1460–1471. [Google Scholar]
- Pe, T.; Thielecke, F. Methodik zur Leistungsabschätzung von HLFC-Absaugsystemen im Flugzeugvorentwurf. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK), Hamburg, Germany, 31 August–2 September 2010. [Google Scholar]
- RTCA/DO-160G. Environmental Conditions and Test Procedures for Airborne Equipment; Section 8, Vibrations; RTCA, Inc.: Washington, DC, USA, 2010. [Google Scholar]
- Henke, R. A320 HLF Fin Flight Tests Completed. Air Space 1999, 1, 76–79. [Google Scholar] [CrossRef]
- Idelchik, I.E. Handbook of Hydraulic Resistance, 3rd ed.; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Bohl, W.; Elmendorf, W. Strömungsmaschinen 1—Aufbau und Wirkweise; Vogel Business Media: Würzburg, Germany, 2013. [Google Scholar]
- Bornholdt, R.; Pe, T.; Thielecke, F. Modellierung und Simulation eines Absaugsystems für ein Seitenleitwerk mit hybrider Laminarisierung. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK), Hamburg, Germany, 31 August–2 September 2010. [Google Scholar]
- Cordier, O. Ähnlichkeitsbedingungen für Strömungsmaschinen; Brennstoff, Wärme, Kraft (BWK): Düsseldorf, Germany, 1953; Volume 5, pp. 337–340. [Google Scholar]
- Epple, P.; Durst, F.; Delgado, A. A theoretical derivation of the Cordier diagram for turbomachines. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 354. [Google Scholar] [CrossRef]
- Teichel, S.H.; Dörbaum, M.; Misir, O.; Merkert, A.; Mertens, A.; Seume, J.R.; Ponick, B. Design considerations for the components of electrically powered active high-lift systems in civil aircraft. CEAS Aeronaut. J. 2015, 6, 49–67. [Google Scholar] [CrossRef]
- Dixon, S.L.; Hall, C.A. Fluid Mechanics and Thermodynamics of Turbomachinery; Butterworth-Heinemann/Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Menny, K. Strömungsmaschinen: Hydraulische und Thermische Kraft- und Arbeitsmaschinen; B.G. Teubner Verlag: Wiesbaden, Germany, 2006. [Google Scholar]
- Andrich, B. Flugzeugstrahltriebwerke; Lecture Notes; Hamburg University of Technology: Hamburg, Germany, 2012. [Google Scholar]
- Wulff, D.; Kosyna, G. HIGHER-LE Workshop “Auslegung von Radialverdichtern”; Technische Universität Braunschweig: Braunschweig, Germany, 2009. [Google Scholar]
- Müller, G.; Vogt, K.; Ponick, B. Berechnung Elektrischer Maschinen; Wiley-VCH: New York, NY, USA, 2008. [Google Scholar]
- Wiremasters. Available online: https://www.wiremasters.net/products/grid?category=m22759-34 (accessed on 13 August 2019).
- Motoranalysis. Available online: http://motoranalysis.com/ (accessed on 13 August 2019).
- Hakenesch, P.R. Technische Thermodynamik; Lecture Notes; Version 2.1; Munich University of Applied Sciences: Munich, Germany, 2010. [Google Scholar]
- Sarma, M. Electric Machines: Steady-State Theory and Dynamic Performance, 2nd ed.; West Publishing Company: St. Paul, MN, USA, 1994. [Google Scholar]
- Hong, D.K.; Woo, B.-C.; Lee, J.Y.; Koo, D.H. Ultra high speed motor supported by air foil bearings for air blower cooling fuel cells. IEEE Trans. Magn. 2012, 48, 871–874. [Google Scholar] [CrossRef]
- Tosetti, M.; Maggiore, P.; Cavagnino, A.; Vaschetto, S. Conjugate heat transfer analysis of integrated brushless generators for more electric engines. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 1518–1525. [Google Scholar] [CrossRef]
- Rajput, N.M. Thermal Modeling of PMSM and Inverter. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA, USA, May 2016. [Google Scholar]
- Parker Hannafin Corporation, GVM210-150P6 Datasheet. Available online: https://www.parker.com/parkerimages/Market-Tech/Market-Tech%20Home/Hybrid%20Electric%20Vehicles/Literature/GVM210-050%20Brochure.pdf (accessed on 13 August 2019).
- Datasheet for EMTC 120k Compressor; Fischer Spindle: Herzogenbuchsee, Switzerland, 2019.
- Bianchi, N.; Bolognani, S.; Luise, F. Potentials and limits of highspeed PM motors. IEEE Trans. Ind. Appl. 2004, 40, 1570–1578. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Estimated Values |
|---|---|
| Plenum pressure | 13,500 Pa |
| Plenum temperature | 240 K |
| Mass flow requirement | 100 g/s |
| Parameters | Estimated Values |
|---|---|
| Type | Radial/Mixed flow |
| Pressure ratio | 1.82 |
| Suction power | 6 kW |
| Mass flow | 100 g/s |
| Estimated speed | 100,000 RPM |
| Estimated weight | 8 kg |
| Estimated length | 0.21 m |
| Parameters | Value |
|---|---|
| Phases | 3 |
| Number of poles | 4 |
| Number of slots | 36 |
| Stator outer diameter (mm) | 188 |
| Axial length (mm) | 165 |
| Permanent magnet material | Recoma 28 Cobalt |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalarikovilagam Srinivasan, G.; Bertram, O. Preliminary Design and System Considerations for an Active Hybrid Laminar Flow Control System. Aerospace 2019, 6, 109. https://doi.org/10.3390/aerospace6100109
Kalarikovilagam Srinivasan G, Bertram O. Preliminary Design and System Considerations for an Active Hybrid Laminar Flow Control System. Aerospace. 2019; 6(10):109. https://doi.org/10.3390/aerospace6100109
Chicago/Turabian StyleKalarikovilagam Srinivasan, G., and Oliver Bertram. 2019. "Preliminary Design and System Considerations for an Active Hybrid Laminar Flow Control System" Aerospace 6, no. 10: 109. https://doi.org/10.3390/aerospace6100109
APA StyleKalarikovilagam Srinivasan, G., & Bertram, O. (2019). Preliminary Design and System Considerations for an Active Hybrid Laminar Flow Control System. Aerospace, 6(10), 109. https://doi.org/10.3390/aerospace6100109