Experimental Validation of an Onboard Transient Luminous Events Observation System for VisionCube via Ground Simulation Environment

Abstract
1. Introduction
2. Hardware of Transient Luminous Event (TLE) Observation System
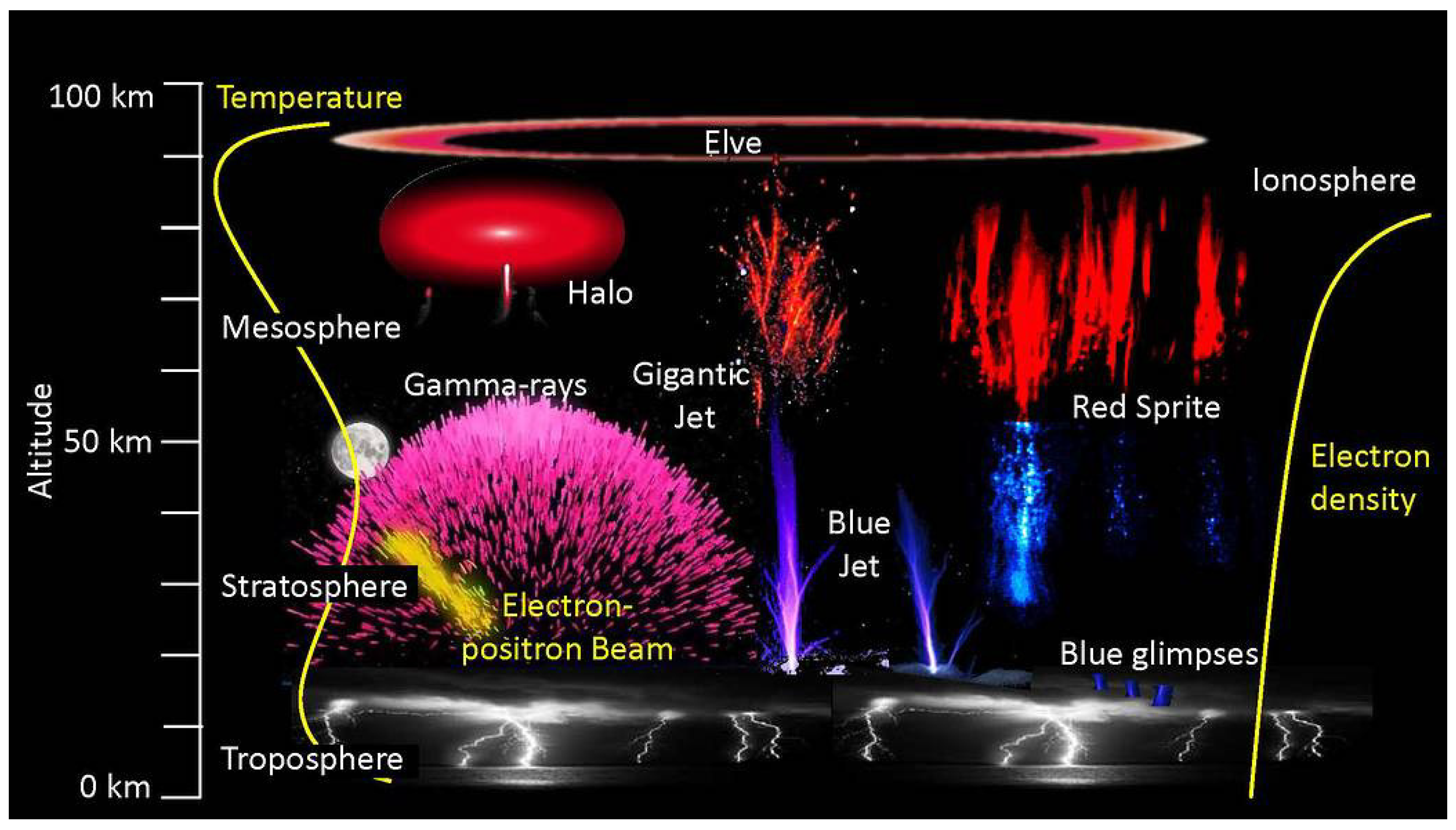
2.1. Background
2.2. Hardware Component
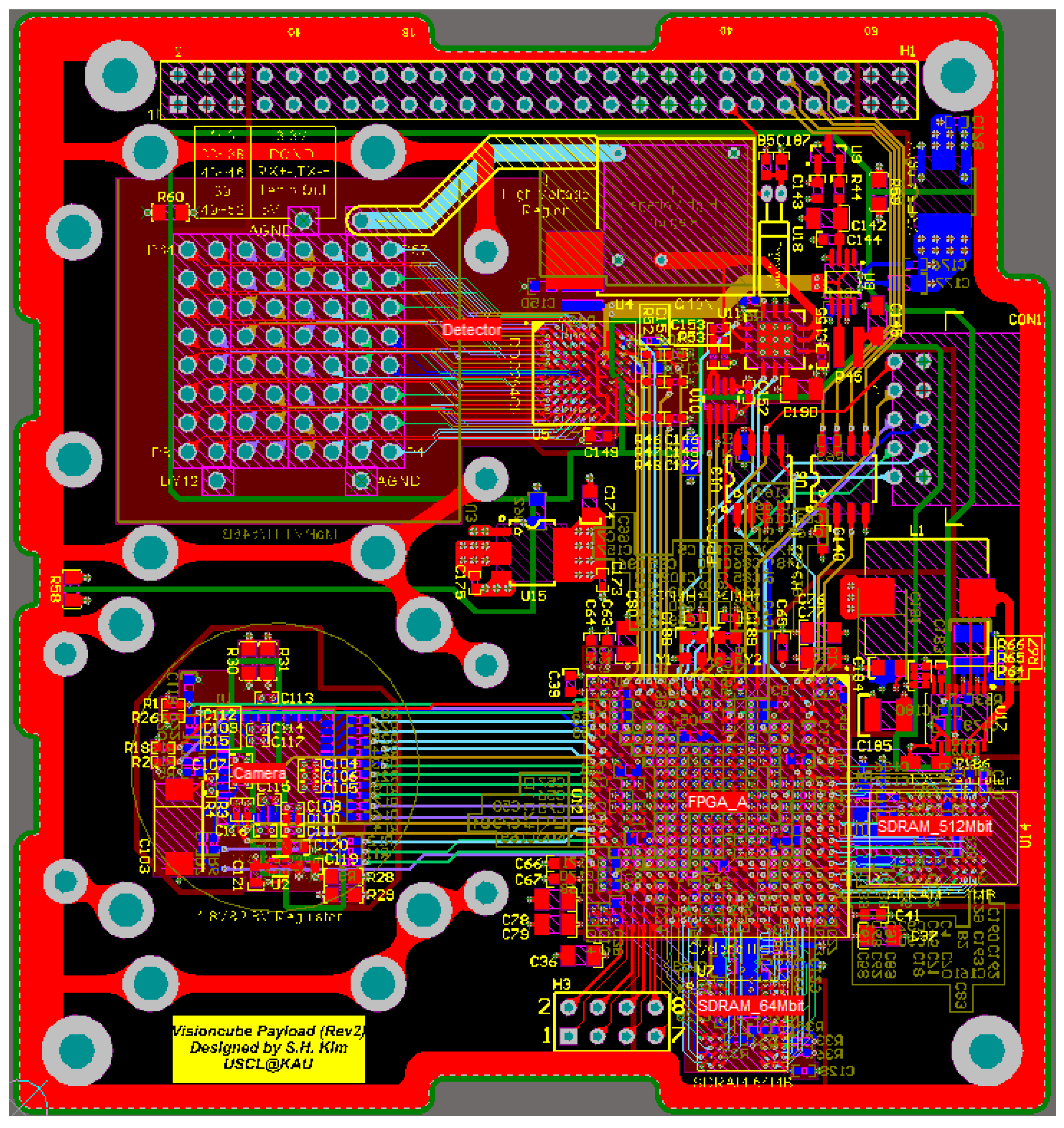
2.3. Board Configuration
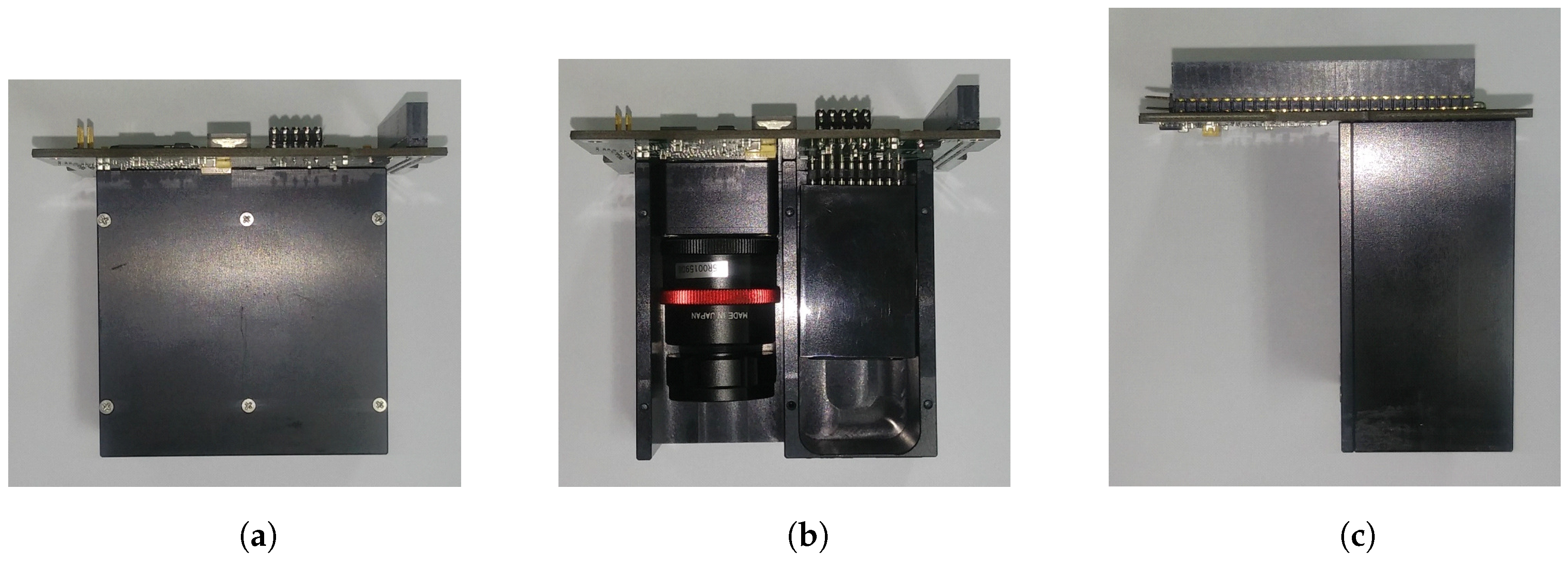
2.4. Mechanical Design
3. The Software of TLE Observation System
3.1. TLE Detection Algorithm
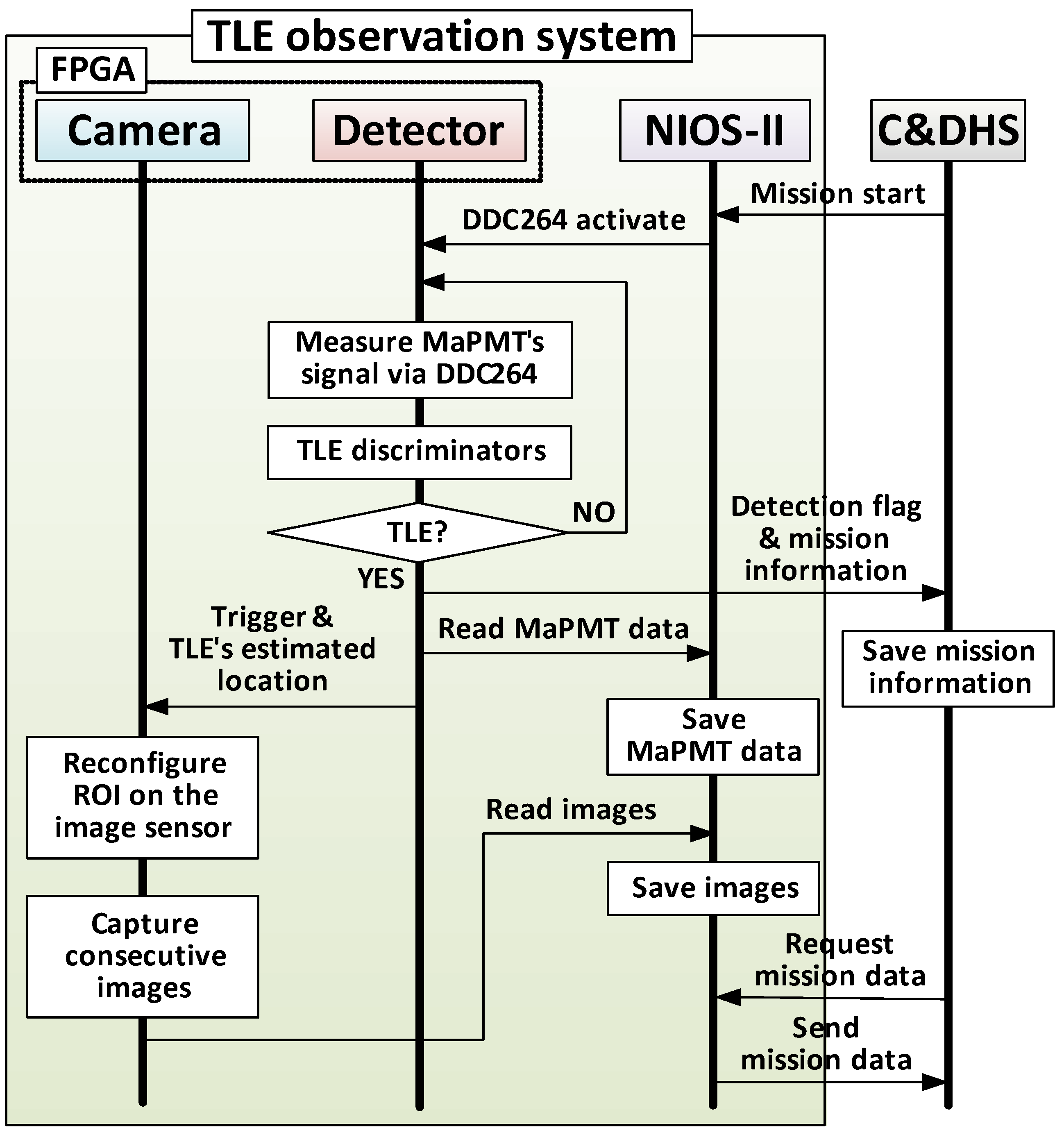
3.2. System Operation
3.3. Software Modules
4. Experimental Validation
4.1. Ground Simulation Facility
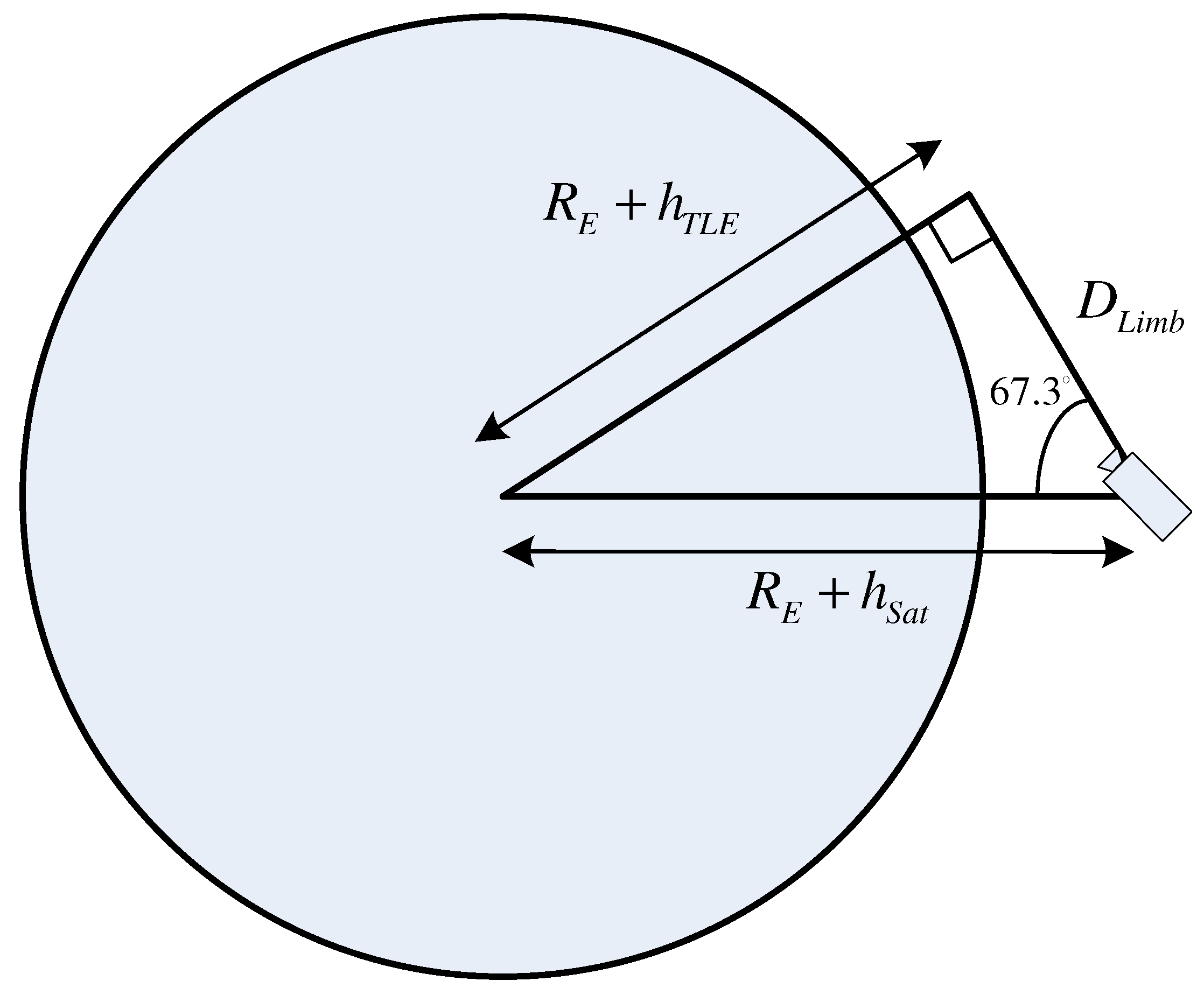
4.1.1. Electron Counts Generated by TLE
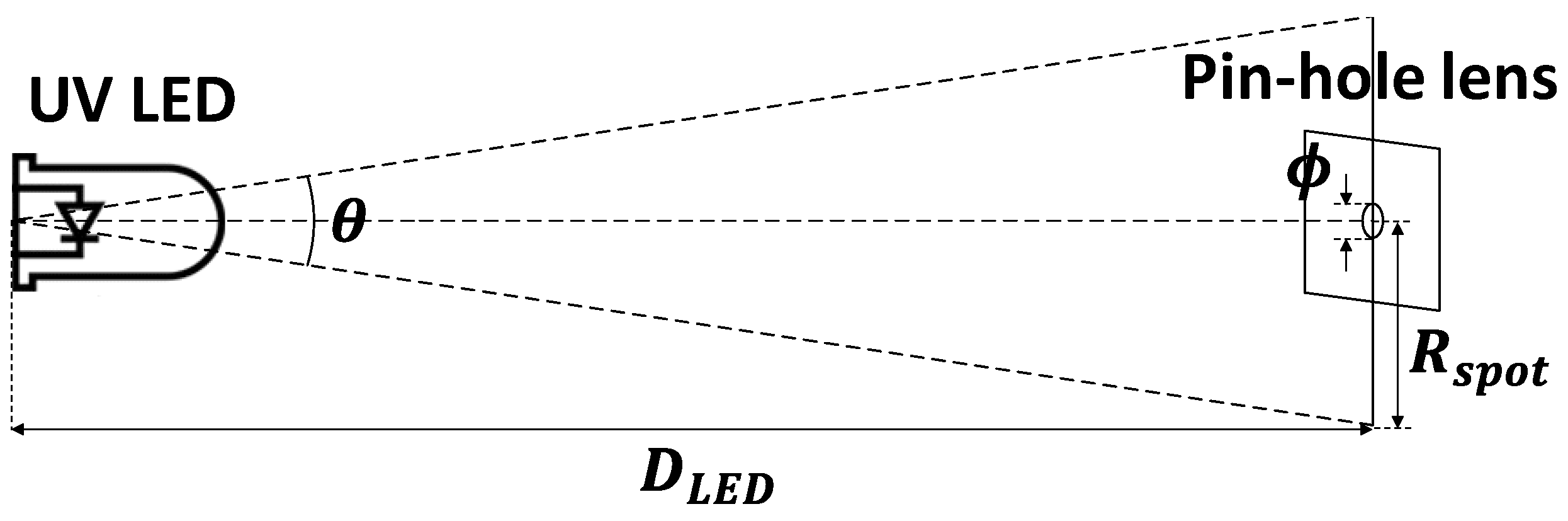
4.1.2. Electric Charge Generated by UV LED
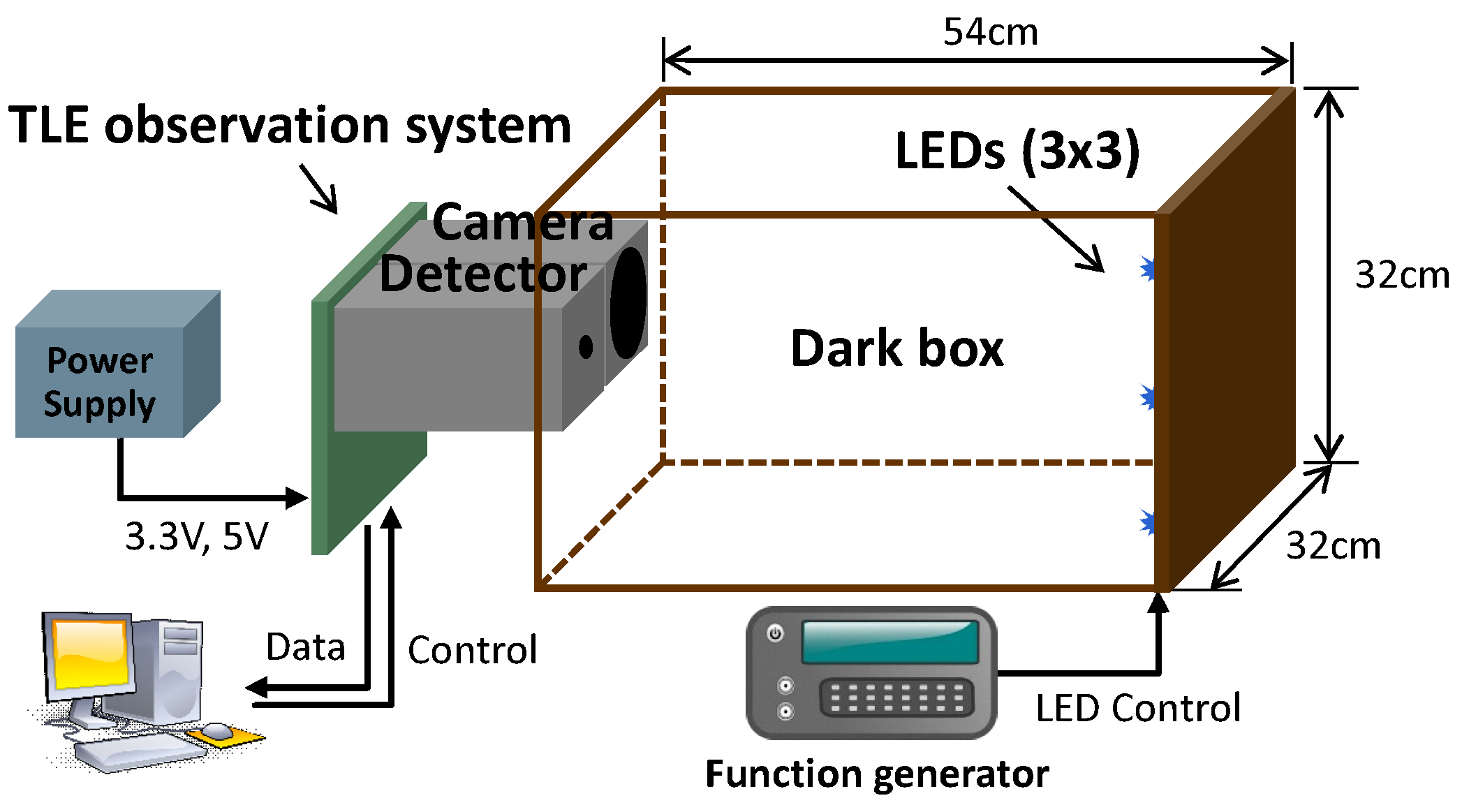
4.1.3. Design of Ground Simulation Facility
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Franz, R.C.; Nemzek, R.J.; Winckler, J.R. Television Image of a Large Upward Electrical Discharge above a Thunderstorm System. Science 1990, 249, 48. [Google Scholar] [CrossRef] [PubMed]
- Fukunishi, H.; Takahashi, Y.; Kubota, M.; Sakanoi, K.; Inan, U.S.; Lyons, W.A. Elves: Lightning-induced Transient Luminous Events in the Lower Ionosphere. Geophys. Res. Lett. 1996, 23, 2157–2160. [Google Scholar] [CrossRef]
- Su, H.T.; Hsu, R.R.; Chen, A.B.C.; Lee, Y.J.; Lee, L.C. Observation of Sprites over the Asian Continent and over Oceans around Taiwan. Geophys. Res. Lett. 2002, 29, 3-1–3-4. [Google Scholar] [CrossRef]
- Bering, E.A.; Benbrook, J.R.; Bhusal, L.; Garrett, J.A.; Paredes, A.M.; Wescott, E.M.; Moudry, D.R.; Sentman, D.D.; Stenbaek-Nielsen, H.C.; Lyons, W.A. Observations of Transient Luminous Events (TLEs) associated with Negative Cloud to Ground (-CG) Lightning Strokes. Geophys. Res. Lett. 2004, 31, L05104. [Google Scholar] [CrossRef]
- Wescott, E.M.; Sentman, D.; Osborne, D.; Hampton, D.; Heavner, M. Preliminary Results from the Sprites94 Aircraft Campaign: 2. Blue Jets. Geophys. Res. Lett. 1995, 22, 1209–1212. [Google Scholar] [CrossRef]
- Wescott, E.M.; Sentman, D.D.; Heavner, M.J.; Hampton, D.L.; Osborne, D.L.; Vaughan, O.H. Blue Starters: Brief Upward Discharges from an Intense Arkansas Thunderstorm. Geophys. Res. Lett. 1996, 23, 2153–2156. [Google Scholar] [CrossRef]
- Boeck, W.L.; Vaughan, O.H.; Blakeslee, R.J.; Vonnegut, B.; Brook, M. The Role of the Space Shuttle Videotapes in the Discovery of Sprites, Jets and Elves. J. Atmos. Sol. Terr. Phys. 1998, 60, 669–677. [Google Scholar] [CrossRef]
- Yair, Y.; Israelevich, P.; Devir, A.D.; Moalem, M.; Price, C.; Joseph, J.H.; Levin, Z.; Ziv, B.; Sternlieb, A.; Teller, A. New Observations of Sprites from the Space Shuttle. J. Geophys. Res. 2004, 109, D15201. [Google Scholar] [CrossRef]
- Chern, J.L.; Hsu, R.R.; Su, H.T.; Mende, S.B.; Fukunishi, H.; Takahashi, Y.; Lee, L.C. Global Survey of Upper Atmospheric Transient Luminous Events on the ROCSAT-2 Satellite. J. Atmos. Sol. Terr. Phys. 2003, 65, 647–659. [Google Scholar] [CrossRef]
- Blanc, E. Space Observations of Transient Luminous Events and Associated Emissions in the Upper Atmosphere above Thunderstorm Areas. C. R. Geosci. 2010, 342, 312–322. [Google Scholar] [CrossRef]
- Yoshida, K.; Takahashi, Y.; Sakamoto, Y.; Ujiie, E.; Takiuchi, K.; Nakazato, Y.; Sawakami, T.; Sakanoi, T.; Kasaba, Y.; Kondo, S.; et al. SPRITE-SAT: A Micro Satellite for Scientific Observation of Transient Luminous Events and Terrestrial Gamma-Ray Flashes. Trans. Jpn. Soc. Aeron. Space Sci. Aerosp. Technol. Jpn. 2010, 8, Tm_7–Tm_12. [Google Scholar] [CrossRef]
- Blanc, E.; Farges, T.; Roche, R.; Brebion, D.; Hua, T.; Labarthe, A.; Melnikov, V. Nadir observations of sprites from the International Space Station. J. Geophys. Res. 2004, 109. [Google Scholar] [CrossRef]
- Jehl, A.; Farges, T.; Blanc, E. Color pictures of sprites from non-dedicated observation on board the International Space Station. J. Geophys. Res. 2013, 118, 454–461. [Google Scholar] [CrossRef]
- Pasko, V.P.; Qin, J.; Celestin, S. Toward better Understanding of Sprite Streamers: Initiation, Morphology, and Polarity Asymmetry. Surv. Geophys. 2013, 34, 797–830. [Google Scholar] [CrossRef]
- Frey, H.U.; Mende, S.B.; Cummer, S.A.; Li, J.; Adachi, T.; Fukunishi, H.; Takahashi, Y.; Chen, A.B.; Hsu, R.R.; Su, H.T.; et al. Halos Generated by Negative Cloud-to-ground Lightning. Geophys. Res. Lett. 2007, 34, L18801. [Google Scholar] [CrossRef]
- Pasko, V.P.; Yair, Y.; Kuo, C.L. Lightning Related Transient Luminous Events at High Altitude in the Earth’s Atmosphere: Phenomenology, Mechanisms and Effects. Space Sci. Rev. 2012, 168, 475–516. [Google Scholar] [CrossRef]
- Jeon, J. Development of MEMS Telescope for Extreme Lightning (MTEL) for the Study of Transient Luminous Events. Ph.D. Thesis, Ewha Womans University, Seoul, Korea, 2014. [Google Scholar]
- Van der Velde, O.A.; Lyons, W.A.; Nelson, T.E.; Cummer, S.A.; Li, J.; Bunnell, J. Analysis of the first gigantic jet recorded over continental North America. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- Pasko, V.P.; George, J.J. Three-dimensional modeling of blue jets and blue starters. J. Geophys. Res. 2002, 107. [Google Scholar] [CrossRef]
- Upper Atmosphere Phenomena Caused by Thunderstorms (NASA). Available online: https://www.nasa.gov/image-feature/upper-atmosphere-phenomena-caused-by-thunderstorms (accessed on 1 August 2018).
- Yair, Y.; Rubanenko, L.; Mezuman, K.; Elhalel, G.; Pariente, M.; Glickman-Pariente, M.; Ziv, B.; Takahashi, Y.; Inoue, T. New Color Images of Transient Luminous Events from Dedicated Observations on the International Space Station. J. Atmos. Sol. Terr. Phys. 2013, 102, 140–147. [Google Scholar] [CrossRef]
- Myhrvold, N. Comparing NEO Search Telescopes. Publ. Astron. Soc. Pac. 2016, 128, 045004. [Google Scholar] [CrossRef]
- Shao, M.; Turyshev, S.G.; Spangelo, S.; Werne, T.; Zhai, C. A Constellation of SmallSats with Synthetic Tracking Cameras to Search for 90% of Potentially Hazardous Near-Earth Objects. Astron. Astrophys. 2017, 603, A126. [Google Scholar] [CrossRef]
- Cahoy, K.; Kennedy, A.K. Initial Results from ACCESS: An Autonomous CubeSat Constellation Scheduling System for Earth Observation. In Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5–10 August 2017. [Google Scholar]
- Ma, Y.; Zou, X.; Weng, F. Potential Applications of Small Satellite Microwave Observations for Monitoring and Predicting Global Fast-Evolving Weathers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2441–2451. [Google Scholar] [CrossRef]
- Reising, S.; Kummerow, C.D.; Chandrasekar, V.; Berg, W.; Olson, J.P.; Gaier, T.C.; Padmanabhan, S.; Lim, B.H.; Heneghan, C.; Brown, S.T.; et al. Temporal Experiment for Storms and Tropical Systems Technology Demonstration (TEMPEST-D) Mission Enabling Time-Resolved Cloud and Precipitation Observations from 6U-Class Satellite Constellations. In Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5–10 August 2017. [Google Scholar]
- Wikipedia Contributors. Available online: https://en.wikipedia.org/wiki/CubeSat/ (accessed on 1 August 2018).
- The CubeSat Program. Available online: http://www.cubesat.org/s/cds_rev13_final2.pdf (accessed on 6 April 2018).
- Heidt, H.; Puig-Suari, J.; Moore, A.; Nakasuka, S.; Twiggs, R. CubeSat: A New Generation of Picosatellite for Education and Industry Low-cost Space Experimentation. In Proceedings of the 14th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 21–24 August 2000. [Google Scholar]
- Hamamatsu. Available online: https://www.hamamatsu.com/jp/en/product/type/H7546B/index.html (accessed on 1 September 2018).
- Hamamatsu. Available online: https://www.hamamatsu.com/resources/pdf/etd/H7546A_H7546B_TPMH1240E.pdf (accessed on 1 August 2018).
- Pasko, V.P. Recent Advances in Theory of Transient Luminous Events. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Texas Instruments. Available online: http://www.ti.com/lit/ds/symlink/ddc264.pdf (accessed on 1 August 2018).
- ON Semiconductor. Available online: http://www.onsemi.com/pub/Collateral/MT9P031-D.PDF (accessed on 1 August 2018).
- Jung, D.; Kim, S. VisionCube Preliminary Design Review; Technical Report; Korea Aerospace Research Institute: Daejeon, Korea, 2016. [Google Scholar]
- Garipov, G.; Khrenov, B.; Klimov, P.; Klimenko, V.; Mareev, E.; Martines, O.; Mendoza, E.; Morozenko, V.; Panasyuk, M.; Park, I.; et al. Global Transients in Ultraviolet and Red-Infrared Ranges from Data of Universitetsky-Tatiana-2 Satellite. J. Geophys. Res. 2013, 118, 370–379. [Google Scholar] [CrossRef]
- BIVAR. Available online: https://www.bivar.com/portals/0/products/UV3TZ-XXX-XX.pdf (accessed on 1 August 2018).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Duration (ms) | Size (km) | Velocity (km/s) | Altitude (km) |
|---|---|---|---|---|
| Blue jets | up to 250 | 3–20 | 12 | 20–40 |
| Gigantic jets | less than 1 | 20–30 | 70–90 | |
| Sprite | 1–10 | 25–50 | 10,000 | 40–90 |
| Elves | less than 1 | over 300 | 100,000 | 84–87 |
| Parts | Specifications | Functions | |
|---|---|---|---|
| Processor (Intel Cyclone II EP2C50) | 50,528 logic elements | (FPGA) Implement TLE observation algorithm | |
| 594,432 total RAM bits | (Nios-II) System control, interface and data handling | ||
| 86 embedded multipliers | |||
| 4 PLLs, 294 I/O pins | |||
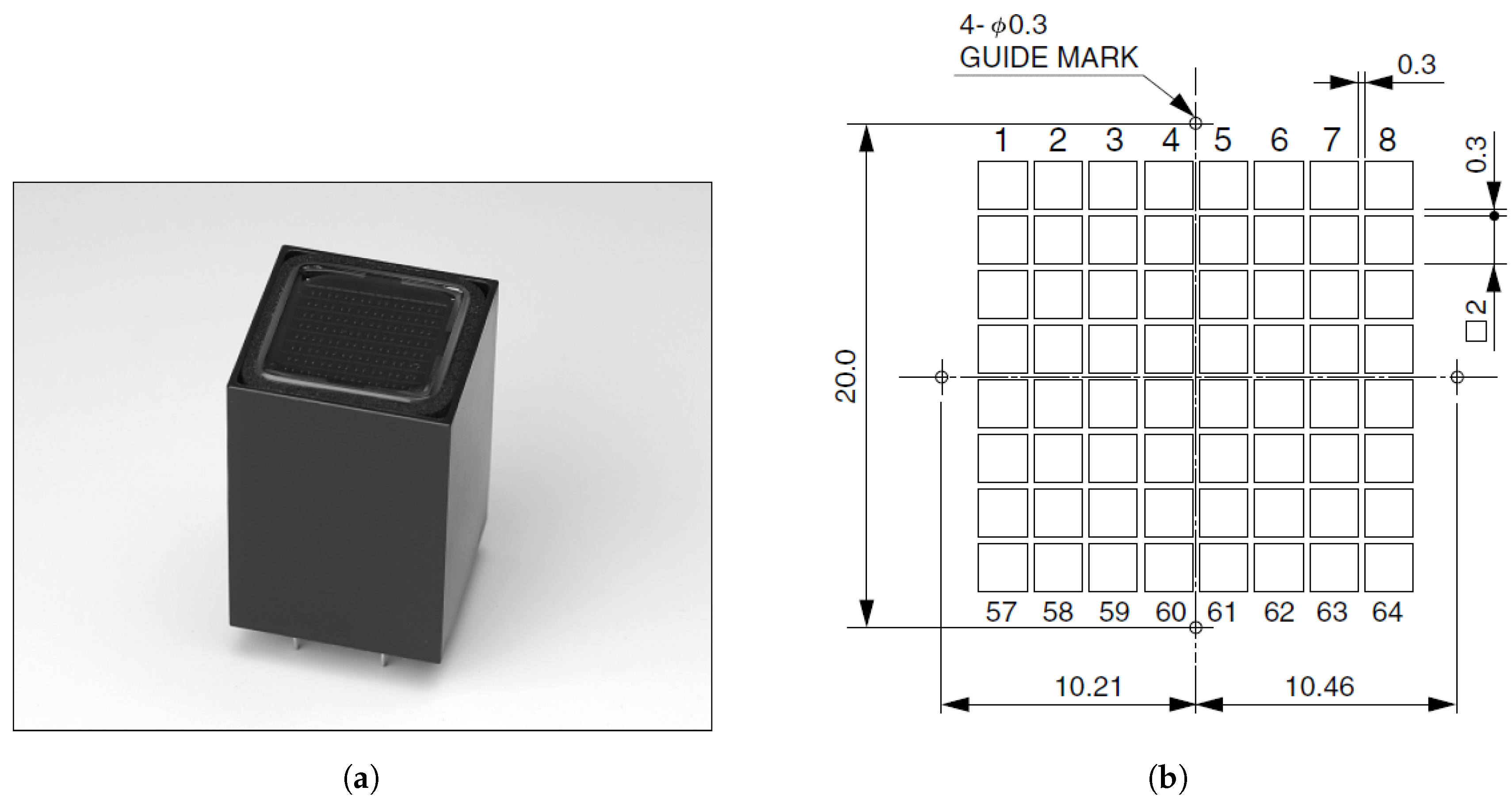
| Detector | MaPMT | 8 × 8 multi-anode | Sense photons from TLE |
| 18.1 mm × 18.1 mm effective area | |||
| Pin-hole lens | 28.16 mm focal length, 0.3 mm aperture | 35 field of view (FOV) | |
| DDC264 | Data rates up to 6kSPS with 20-bit resolution | Measure the output current of MaPMT | |
| Integration time as low as 166 s | |||
| DAC | 16-bit resolution, SPI interface | Gain control of MaPMT | |
| High voltage supply | 0 to −1000 VDC output voltage | Supply voltage for MaPMT | |
| Camera | CMOS image sensor | 1/2.5-inch optical format | Obtain 640 × 480 images of TLE with 8-bit grayscale |
| 2592 H × 1944 V active imager size | |||
| 2.2 m × 2.2 m pixel size | |||
| Up to 96 Mb/s data rate | |||
| Fixed-focal length lens | 8.0 mm focal length, f/1.4-f/16, C-mount | 35 field of view | |
| Memory | SDRAM 512 Mb | 32 M × 16, 143 MHz, 54-ball TF-BGA | For Nios-II software |
| SDRAM 64 Mb | 4 M × 16, 166 MHz, 54-ball TF-BGA | For the camera IP | |
| Flash memory | EPCS16 (16 Mb, 8-SOIC) | Programming the processor | |
| Power | 3.3 V (External), 1.2 V | For the processor and relevant parts | |
| 5 V (External) | For the detector and relevant parts | ||
| 1.8 V, 2.8 V | For the CMOS image sensor | ||
| 4.096 V | Reference voltage for the DDC264 | ||
| Interface | PC/104 non-stackthrough connector, RS-422 serial interface | ||
| Size | 90.5 mm × 95.5 mm × 76 mm (including lens housing) | ||
| Weight | Approximately 450g (including lens housing) | ||
| Symbols | Parameters | Value | Unit |
|---|---|---|---|
| The number of UV photons emitted from a TLE | count | ||
| Aperture of pin-hole lens | 0.3 | mm | |
| Altitude of satellite | 575 | km | |
| Altitude of TLE source | 40 | km | |
| T | Duration of the TLE | 10 | ms |
| Sampling time | 166 | s | |
| Quantum efficiency of MaPMT @405 nm | 25 | % | |
| S | Radiant sensitivity of MaPMT | 80 | mA/W |
| G | Gain of MaPMT @-800 V | ||
| Minimum Gain of MaPMT @-500 V |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Nam, T.; Jung, D. Experimental Validation of an Onboard Transient Luminous Events Observation System for VisionCube via Ground Simulation Environment. Aerospace 2018, 5, 100. https://doi.org/10.3390/aerospace5040100
Kim S, Nam T, Jung D. Experimental Validation of an Onboard Transient Luminous Events Observation System for VisionCube via Ground Simulation Environment. Aerospace. 2018; 5(4):100. https://doi.org/10.3390/aerospace5040100
Chicago/Turabian StyleKim, Seho, Taehyung Nam, and Dongwon Jung. 2018. "Experimental Validation of an Onboard Transient Luminous Events Observation System for VisionCube via Ground Simulation Environment" Aerospace 5, no. 4: 100. https://doi.org/10.3390/aerospace5040100
APA StyleKim, S., Nam, T., & Jung, D. (2018). Experimental Validation of an Onboard Transient Luminous Events Observation System for VisionCube via Ground Simulation Environment. Aerospace, 5(4), 100. https://doi.org/10.3390/aerospace5040100