1. Introduction
The capability of identifying unknown targets has become a fundamental aspect that the military world needs to investigate: in fact, the effectiveness of a mission can often depend on a rapid and reliable identification process, fundamental to recognize the threats or to avoid the so called “friendly fire” [
1].
In this context, the use of high resolution range profiles (HRRPs) represents a challenging topic which has been investigated in the scientific literature both for maritime and for airborne targets: in fact, as well as their employment in search and tracking applications, various works exploited HRRPs also for classification/identification purposes [
2,
3,
4,
5,
6,
7]. They can provide information about radar targets when 2-D imaging techniques fail; the latter, in fact, might show a series of issues in particular situations, e.g., when a synthetic aperture radar (SAR) cannot be installed on a moving sensor platform or when an inverse-SAR (ISAR) system finds difficulties in determining an axis rotation for slow targets. Some studies (e.g., [
5]), also suggest that HRRPs are quite robust against aspect angle variations of the target.
HRRPs convey the information about a target, hence the waveforms exploited to perform this task have a great importance; high range resolution techniques rely, in general, on wideband waveforms. The latter include short pulses, compressed pulses and synthetic bandwidth signals [
5].
Simple pulse systems require short signals to achieve high range resolution, but, as the duration of the pulse decreases, the transmitted power must be increased in order to maintain the same signal to noise ratio (SNR) conditions (the pulse duration is directly related to the energy transmitted). For the aforementioned reason, a simple pulse suffers from high power requirements or limited detection [
8,
9].
Pulse compressed waveforms allow to solve the problem that afflicts simple short-pulses. This class of signals is extensively used, providing high resolution without the compromise energy/pulse duration. In this class of signals a frequency modulation is exploited: it can be done by a linear law (also known as linear chirp) or a non-linear law (i.e., non linear chirp). The latter is used to reduce the side lobes of the ambiguity function [
8].
Wideband signals can be also generated by synthetic waveforms: they rely on the duality between time and frequency domains. With these techniques an assembling of segments in the frequency domain is done, and it allows the creation of a wide spectrum with limited constraints applied on the hardware. In stepped-frequency wideband radars, waveforms are obtained by emitting successive relatively narrow-band pulses whose carrier frequency is sequentially increased. The transmitted waveform is typically a monochromatic signal whose duration corresponds roughly to the inverse of the desired instantaneous bandwidth [
5].
More recently, in the family of wideband signals, the use of noise radar waveforms was investigated in several applications due to their good auto correlation function (ACF) properties (high resolution in range) and low probability of intercept (LPI) features [
10,
11,
12]. In particular, they show outstanding performances in high resolution profiling problems; for example in [
13] two constant modulus phase modulated signals are developed and successfully tested. Moreover, in this particular field, modern digital processing techniques provide the possibility to develop low complexity pseudo-noise (PN) signal generators and to perform matched filtering by using commercial field programmable gate arrays (FPGAs) [
14,
15].
Recent works proposed a real time approach based on a multichannel correlator [
16,
17] in which the received signal is cross-correlated to shifted replicas of the reference, i.e., the transmitted samples stored in a memory. However there might be some applications in which storing the samples could represent an issue, e.g., where very long time integrations are needed.
In this study a flexible signal generation algorithm is presented; it exploits a noise radar multichannel correlator without the need of a reference signal storage. This capability was introduced in the system analyzed in [
18], which consisted of a monostatic architecture capable of creating radar HRRPs even in the presence of an effective radiated power (ERP) lower than typical values of radar transmitters. In this context, the profiling function was supposed to exploit designations coming from a surveillance radar, included in the same defense system.
The proposed technique, based on the linear feedback shift register (LFSR) theory [
19], is less effective than some modern PN number generators (e.g., [
20,
21]) but it is particularly suited for our purpose because of the good compromise between its performances and its computational burden. The reference can be directly reproduced in reception and the appropriate delay with respect to the received echo signal can be set using the LFSR initial seed in case of a raw designation.
The produced PN samples guarantee good properties in terms of correlation as well as bringing the possibility of a long-term integration process, very suitable for ERP systems.
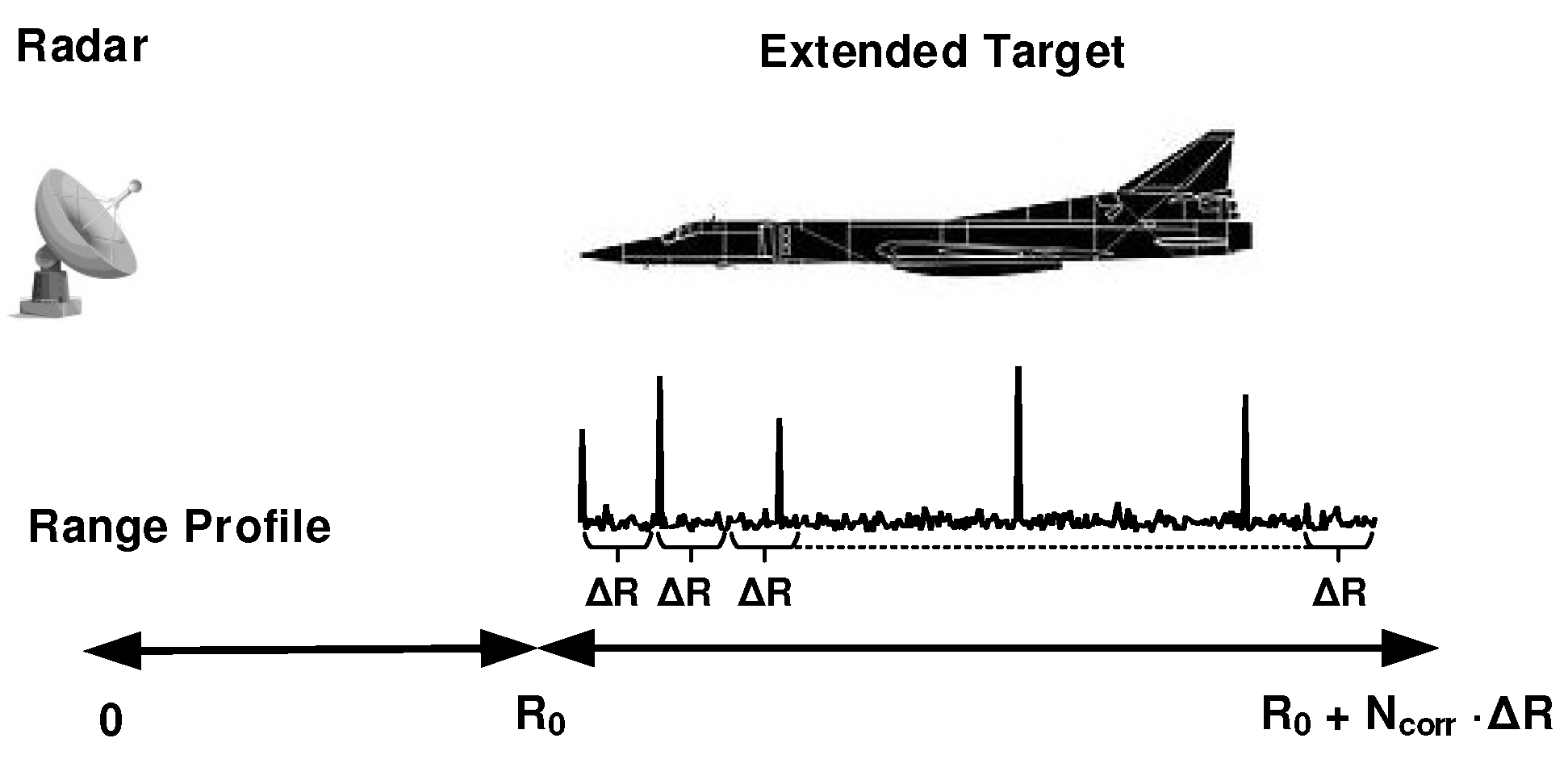
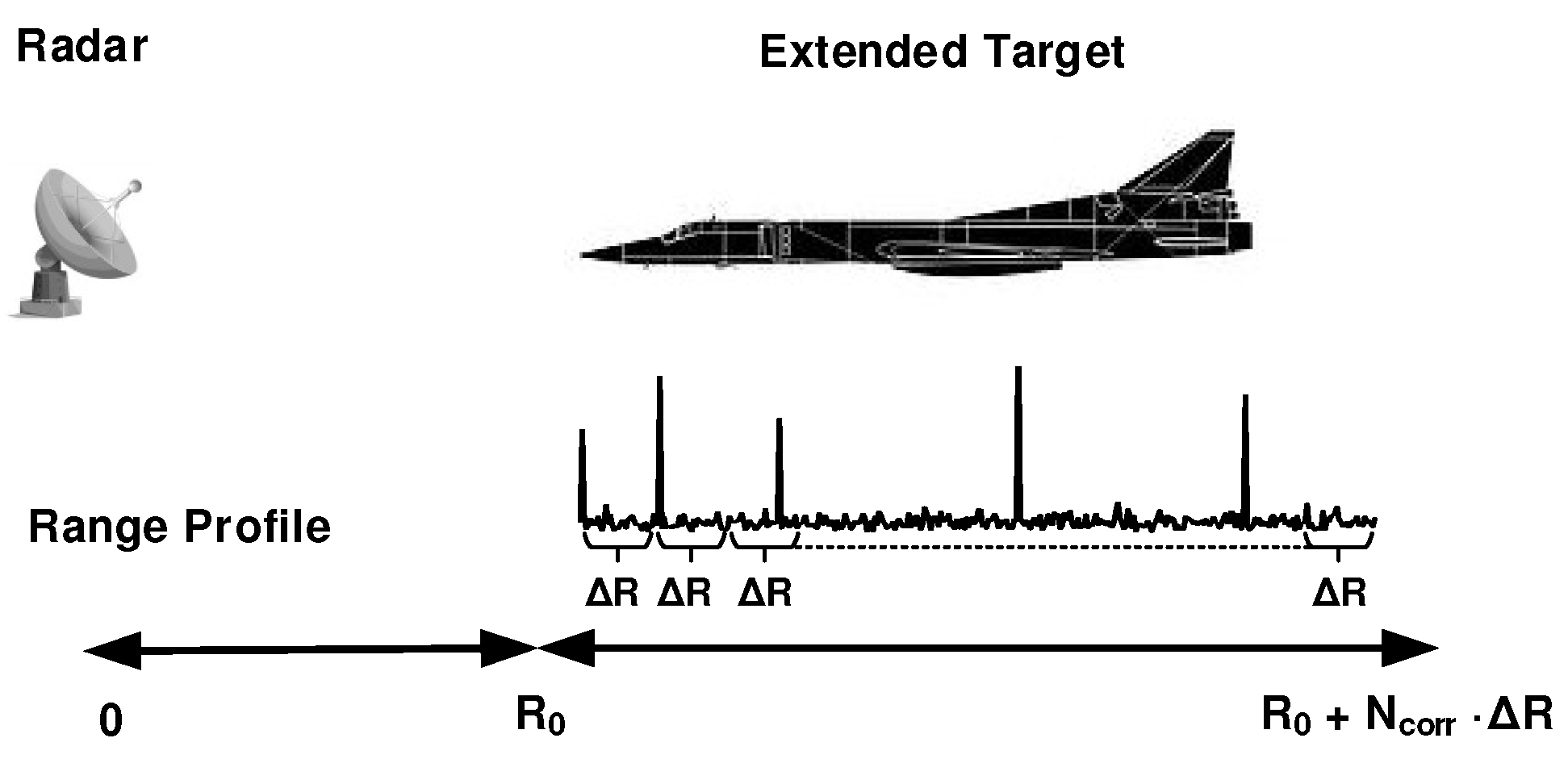
The paper proposes a specific noise radar scheme capable of generating HRRPs in real time: here, particular emphasis is put on the processing chain. Moreover, we supposed only stationary targets or, equivalently, that a motion compensation between the target and the radar was already done.
The overall radar system concept is shown in
Figure 1. Here it is supposed that the extended target is within
, which is partitioned into a set of
range cells, each one having length equal to
.
The physical interactions between the wave transmitted by the radar and the target can be analyzed by using the so called point scatterer model. According to this model, the received waveform can be evaluated as the sum of time-delayed replicas of the emitted signal, each one weighted with a complex coefficient that represents the response in amplitude and phase of the specific scatterer. In fact, each return is due to one of the target scattering centers. The range cell width will be defined by the waveform resolution which, in turn, depends on the signal bandwidth.
The paper is organized as follows.
Section 2 contains the novel contribution, where a series of algebraic manipulations allows to exploit a single pseudo-random bit generator to realize a more complex noise modulation scheme; in this way a noise radar signal can be generated with a very low order of complexity, because it just requires a limited number of memory registers.
Section 3 describes the real-time matched filtering; in
Section 4 and
Section 5 some tests (both by simulation and by an experimental measure) are performed over the proposed algorithm while in
Section 6 a comparison is done with other known pulse compression waveforms. Finally,
Section 7 reports conclusions and future perspectives.
Notation
This section describes the notation used in the present paper. For what concerns the numerical sets, is the set of integers, is the set of natural numbers, is the set of real numbers and is the set of complex numbers. Vectors are denoted by boldface letters, and the symbol stands for transpose. For complex numbers, the symbol stands for conjugate. The symbol indicates the ceiling function. The notation is used to represent the mathematical interval between a and b, endpoints included, while and exclude the first and the second endpoint respectively. In the digital schematics the item corresponds to a discrete time delay equal to the sampling time. As for the signal notation, and stand for continuous-time and discrete-time signals, respectively.
2. Transmitting Section
The properties of the pseudo-random sequences are well known and their use is very common in a wide set of applications (e.g., satellite navigation, telecommunications, cryptography). The have statistical features similar to sequences obtained by random processes but they are generated by deterministic techniques. In fact the generator is modeled by a finite-state machine in which the initial condition is set by a specific key (i.e., the seed); the latter is the only random element while the PN sequence is just the expansion of the seed in a longer string.
With respect to a typical use of the LFSR (e.g., as bipolar modulating signal [
14,
15,
22]), in this work it is exploited in an alternative mode. In fact, noise radar signals are generally synthesized using PN numbers (e.g., [
23,
24]), so the bit sequences are combined in order to get an approximation of independent uniform random variables.
Let suppose
,
, ...,
, as a set of PN bit sequences generated by the same LFSR; the variable
n indicates the discrete time. The first step to get good statistical properties is to make them uncorrelated. An immediate way to achieve it consists of cyclic shifts of a single PN sequence,
:
where
is a set of arbitrary time shifts.
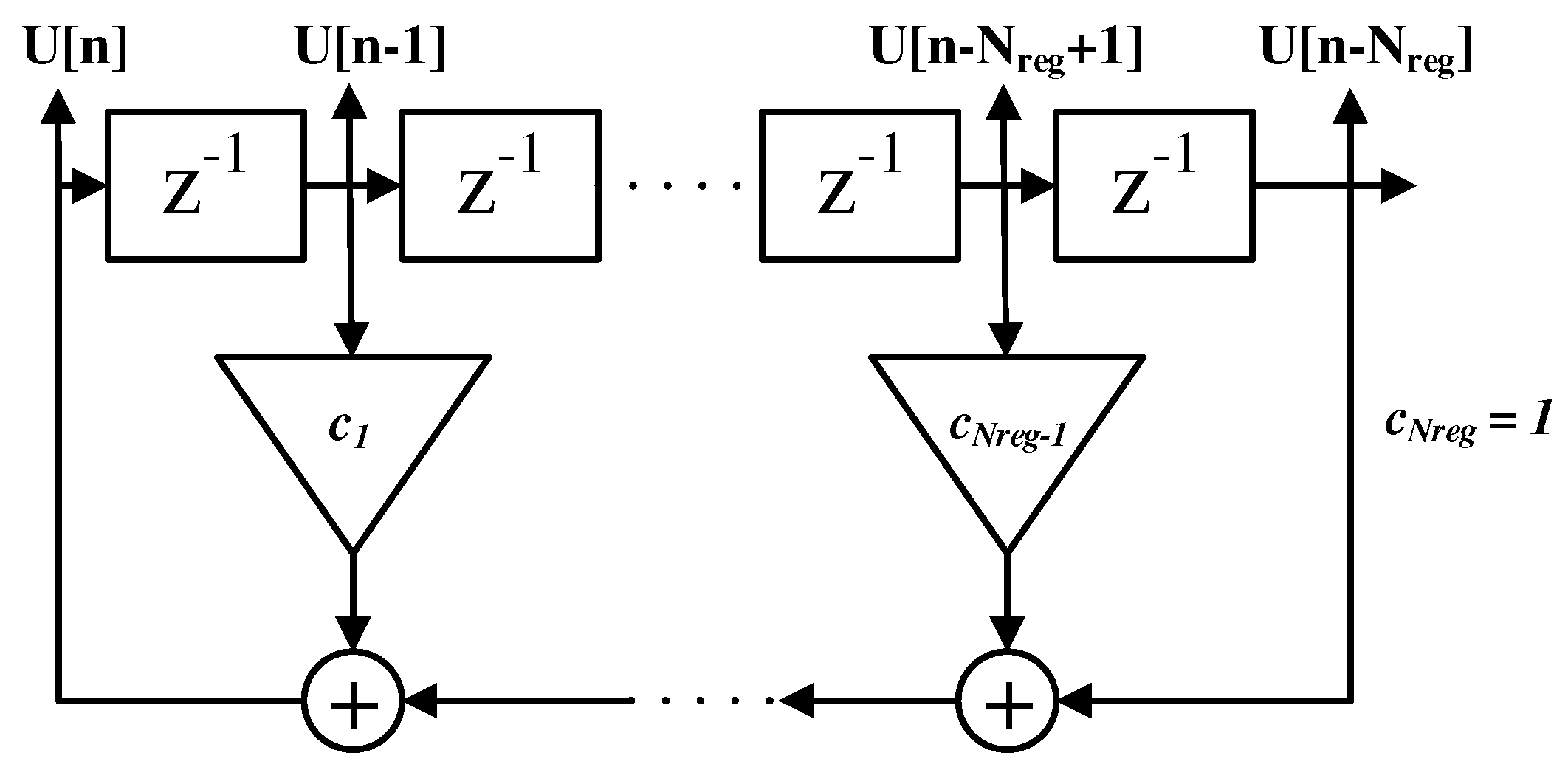
A linear finite-state switching circuit can be modeled by a finite number of adders, memory devices, and constant multipliers connected in any permissible way. In the specific case of the LFSR (see
Figure 2), which is a binary switching circuit, the adder is an “exclusive-or” logical block, the memory is represented by an ordinary binary shift register (as the blocks named
in
Figure 2) while the constant multipliers (the terms
in
Figure 2) for the constant 1 represent connections, and for the constant 0 they are simply no connections. Input and output are assumed to be serial, i.e., they consist of binary data entering an input line one at a time.
In general, it is possible to describe the behavior of this circuit using a polynomial notation [
19], as in Equation (
2):
Here, the
n-th order coefficient is the first term entering the circuit and its effect is the first contribute in output. In this notation a multiplication for
corresponds to a time shift. Using this notation, the LFSR output can be modeled by a characteristic function,
, containing a linear combination of the register binary internal states,
:
The summation is extended to
because of the feedback in the LFSR (whose schematic is shown in
Figure 2).
The term
of Equation (
3) can be written according to the PN maximal length polynomial:
where
is the number of registers (see
Figure 2), also equal to the order of the maximal length polynomial;
are the binary polynomial coefficients;
represents the i-th register content (it can be either 0 or 1).
For each instant,
n, the value
of the PN sequence corresponds to a linear combination of the
registers:
Handling Equation (
4) we get:
In the last step of Equation (
6) let define the new variable
:
Recalling the definition of
, Equation (
7) can be written as:
In (
8) we can put in evidence
:
For the sake of simplicity, the denominator is defined as
:
hence Equation (
9) becomes:
Let introduce a new variable . Considering that is the LFSR seed, the condition must be satisfied, which implies . The parameter m, instead, is equal to where and i goes from 1 to so the maximum value that m can assume is .
Using the variable
m, Equation (
11) becomes:
where the coefficients
can be obtained by the registers content and by the maximal length polynomial coefficients:
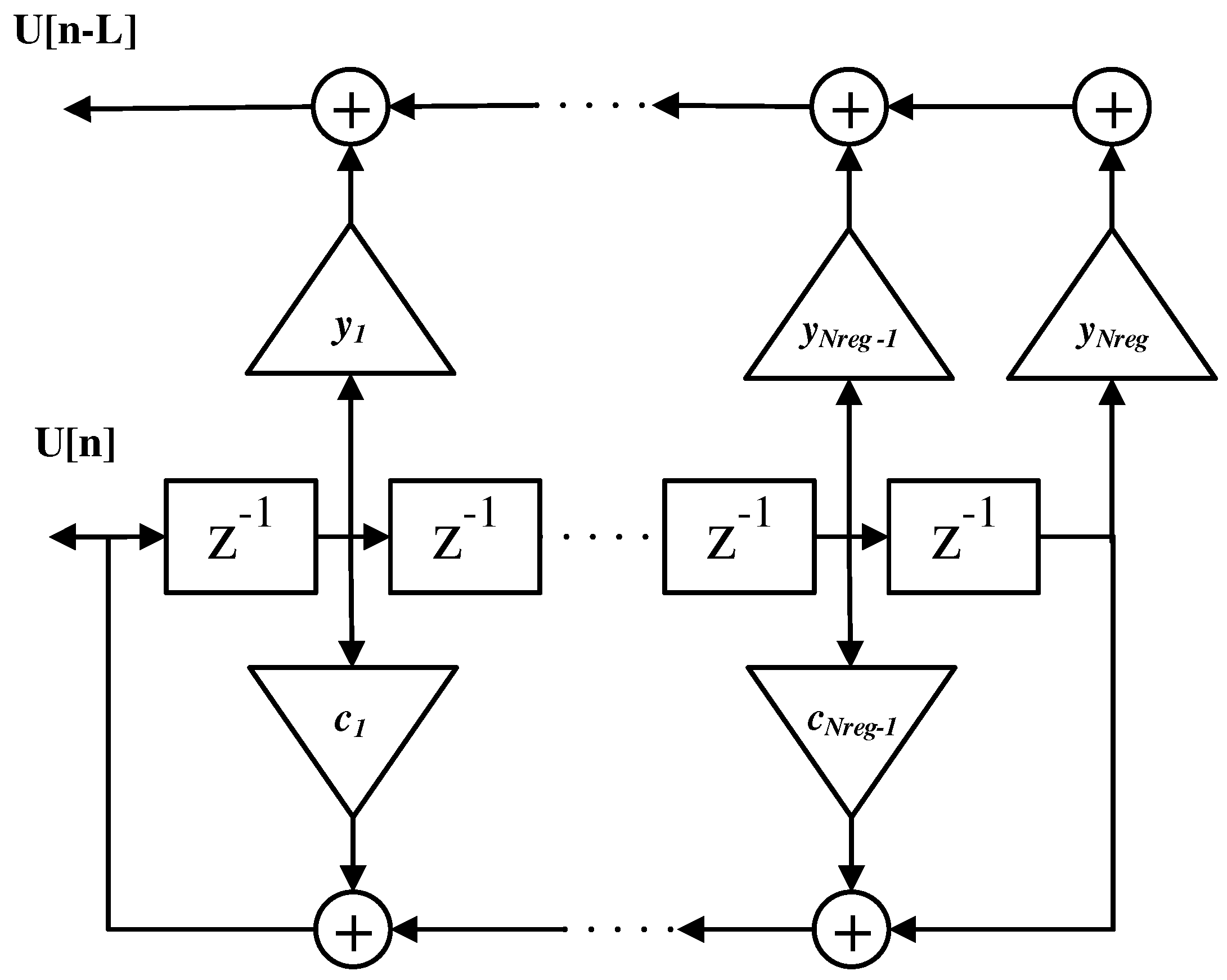
The architecture able to implement this algorithm is shown in
Figure 3: here, with a single LFSR generator it is possible to obtain in the same time the PN sequence,
, and its delayed replica,
, by performing a simple combination of the generator registers with the coefficients
,...,
, where
is the requested delay.
The last aspect to be investigated consists of the calculation of the appropriate binary coefficients,
, ...,
, for the shifted PN sequence
. We can start by their definition, contained in Equation (
13):
The binary coefficients
, can be obtained by a further schematic, shown in
Figure 4 (which is an alternative way to represent the LFSR, see [
19]) and based on Equation (
15):
where
and
.
If the initial conditions are appropriately chosen, the digital structure in
Figure 4 is able to generate the same sequence of Equation (
14):
In fact (
16) is equal to (
14) if
. This implies:
where
, hence the condition
coincides with
At the
L-th step, the registers of the generator in
Figure 4 contain the appropriate coefficients
needed to generate the initial sequence delayed of
L steps, i.e.,
. This algorithm can be generalized on
r delays by overlapping
r similar structures; in this way we are able to obtain
.
The approximation of the uniform random number in
is then obtained by combining a set of
PN sequences as follows:
where
The overall phase generation schematic, including all the theory mentioned above, is shown in
Figure 5. The generated waveform,
, consists of a phase modulated signal (without loss of generality, in the presented development, we deal with the baseband signal; the corresponding radio-frequency (RF) signal, on a carrier
, would be equal to
, where
{} is the real part of a complex number):
where
Equation (
23) represents a sequence of pseudo-random phase symbols with duration
. The variable
, obtained using (
20), can result as a good approximation of a uniform random variable if the appropriate values of
and
are chosen.
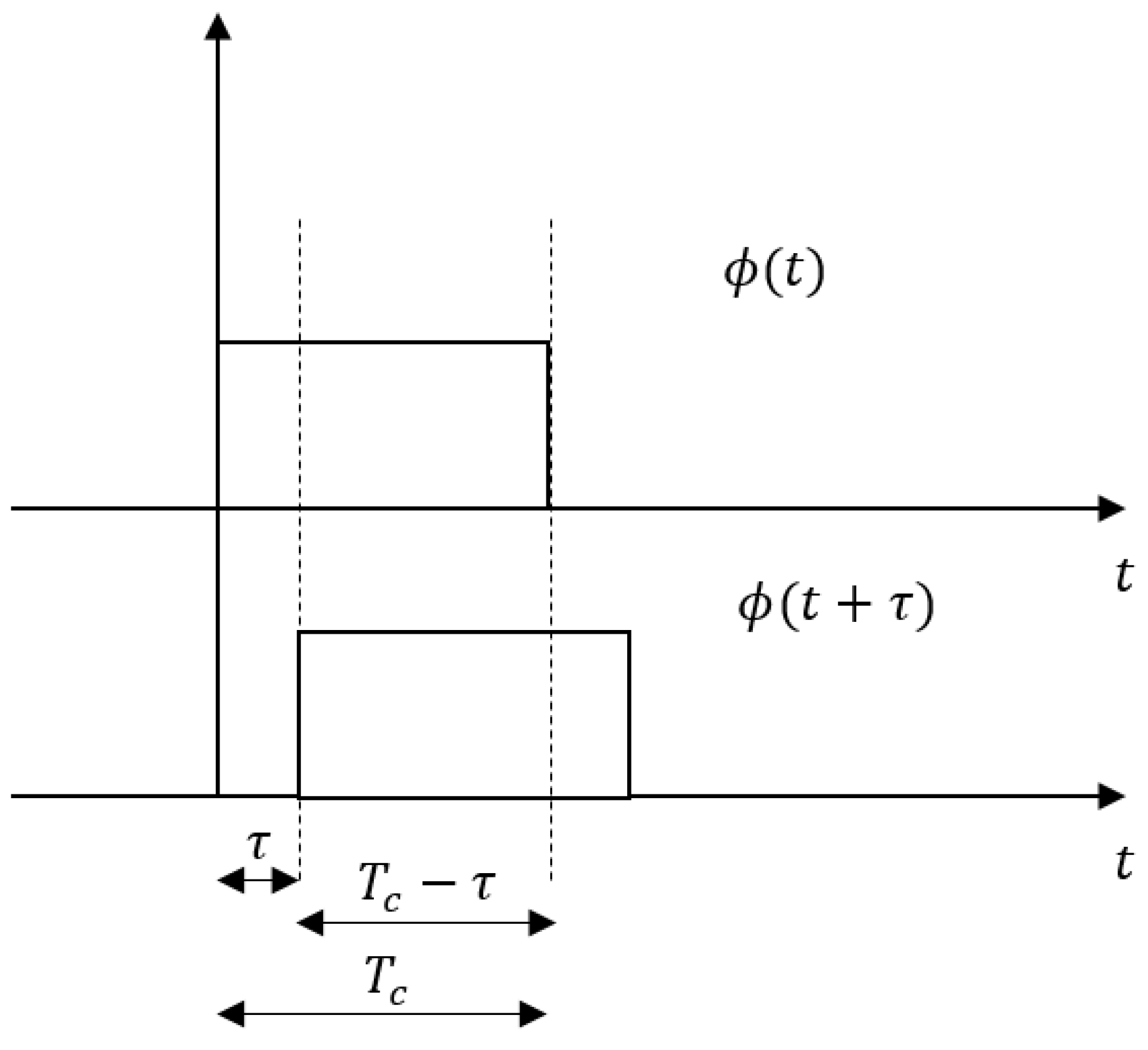
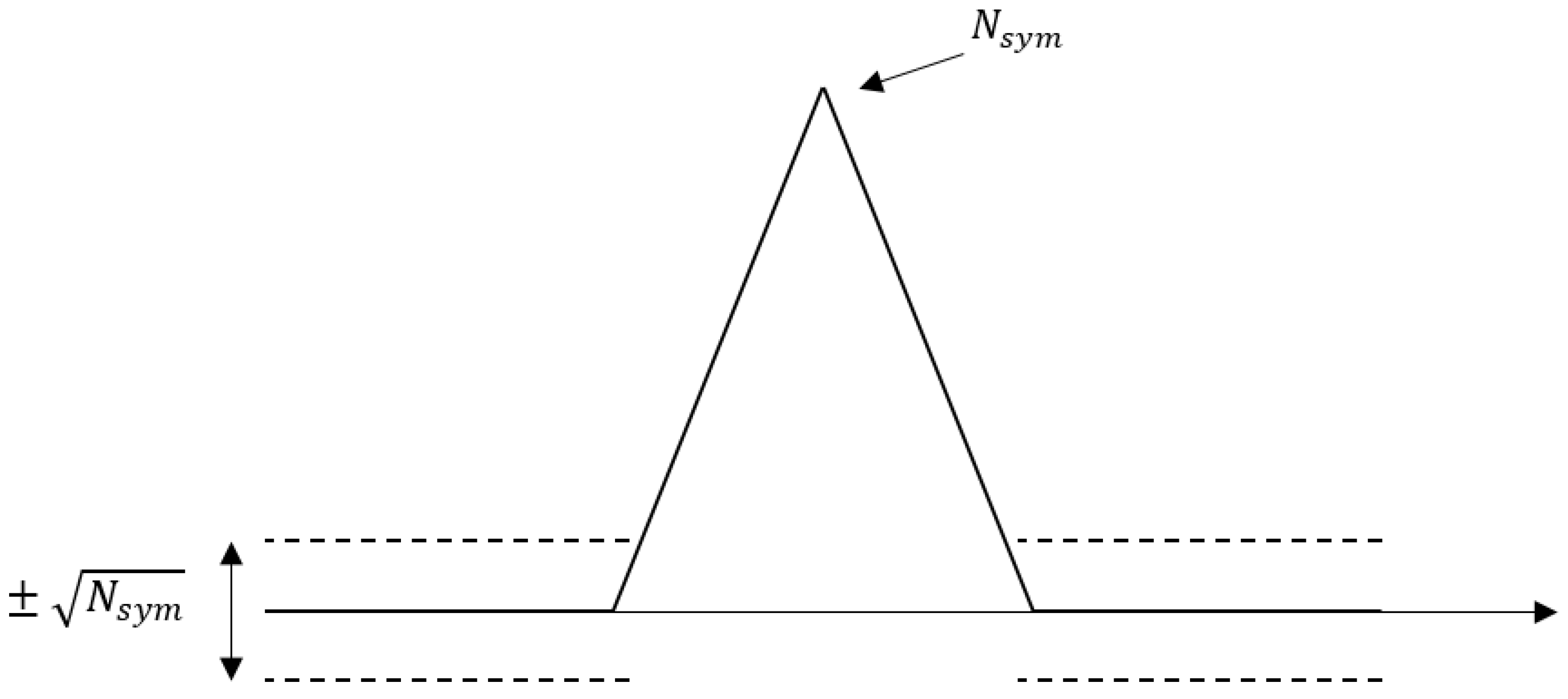
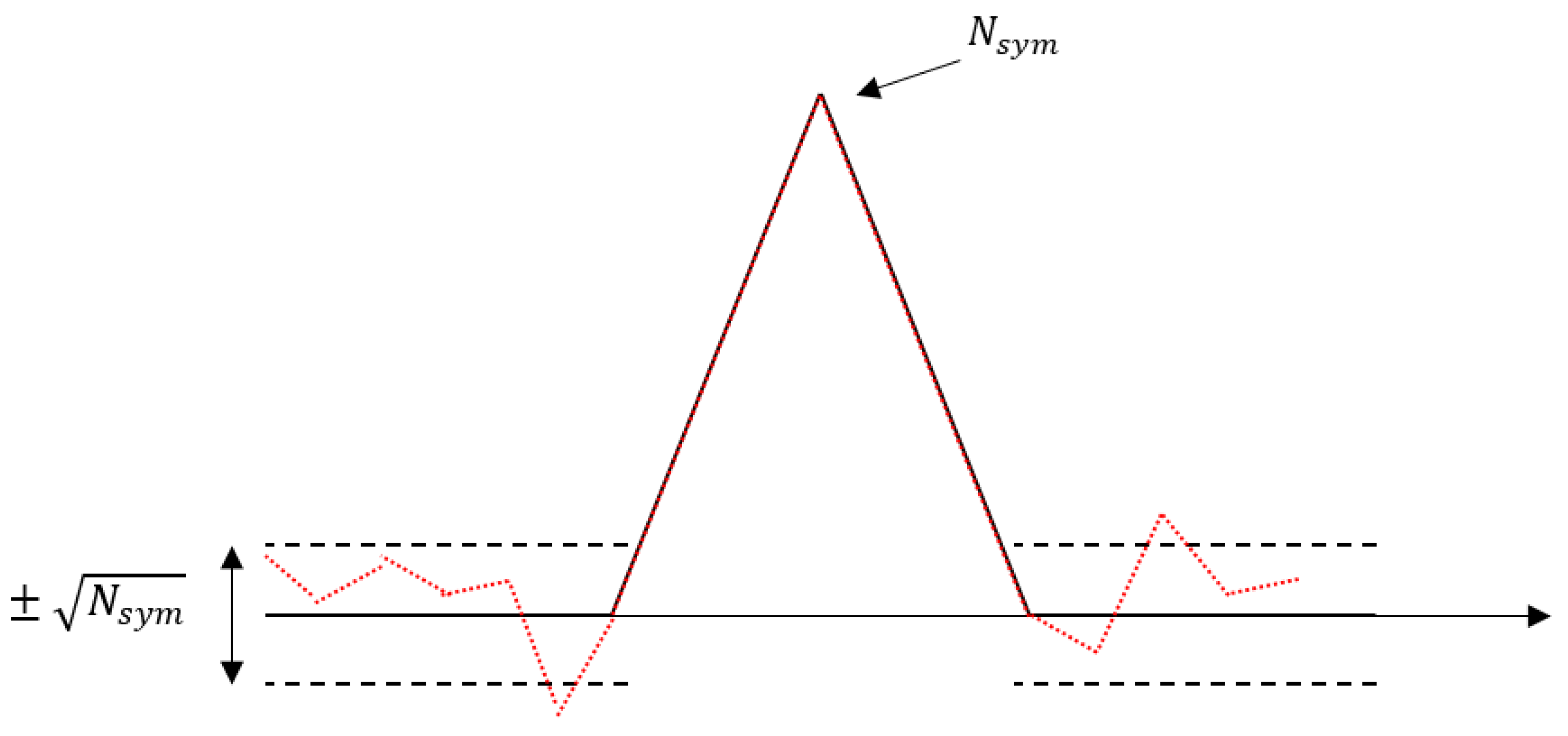
It can be proved (proofs are shown in
Appendix A) that under this condition the auto-correlation function (ACF) of
has a triangular shape with base equal to
and a peak to side-lobe ratio (PSLR) equal to:
with
representing the number of integrated phase symbols and
the time-bandwidth product.
The LFSR generator can be initialized using a specific seed such that the same sequence, appropriately shifted according to the target position, can be locally generated in reception, realizing a sub-optimal matched filter.
The shift is easily performed by using the LFSR seed related to that specific delay. In fact, when the initial seed is known (e.g., in the presence of a designation, as in [
18]), the “maximal length” code is a deterministic sequence: it can be written in a look-up table (LUT) of the same form of
Table 1. Each seed (i.e., the digital word,
, that sets the generator state) corresponds to a specific delayed signal replica.
This architecture results as a powerful solution for some hardware constraints [
18]: in fact it theoretically permits an unlimited integration because samples of the reference signal do not have to be stored.
In the remainder of this paper the exploited sequence, called PN22, is generated using the values of
Table 2. Its total length,
, is suitable for the storage of the PN22 in a LUT similar to
Table 1, showing, in the same time, good statistical properties.
3. Receiving Section
Performing real time matched filtering in noise radar technology (NRT) is a challenging task [
25]. Once the baseband signal components have been obtained, matched filtering can be performed by evaluating a real time cross-correlation (i.e., using the multichannel correlator [
16,
17,
18], whose digital schematic is shown in
Figure 6): exploiting the LFSR generator programmability an appropriately shifted local replica is generated by setting a specific initial seed.
In the correlation block the received signal, , is coherently detected and multiplied to delayed and conjugated local replicas (). The output of this operation consists of a set of complex values, , each one representing a single cross-correlation bin dumped after the integration time, T.
The sums are done over a fixed number
of phase symbols and this procedure is equivalent to a coherent integration, because it takes into account both the amplitude and the phase information: moreover, the integration time
T can be expressed according to
, using the signal sampling time,
, and the cross-correlation sampling step, equal to the chip time
, as in Equation (
25):
A set of accumulation block is needed in order to obtain the cross-correlation on the desired domain. Nowadays a modern field programmable gate array (FPGA) is able to handle a few thousands of these simple units, so implementing such algorithm on a real time board does not represent a critical problem.
The resulting profile can be expressed in vector notation, as follows:
in which the generic
k-th bin can be written in explicit form:
The main parameters of Equation (
27) are:
k, the index of the range bin;
, the number of integrated PN phase symbols;
, the digital complex envelope of the received signal;
, the sampling time;
, the symbol duration;
, the conjugated local replica of the transmitted signal, delayed of k range cells.
The architecture proposed in this Section, compared to the typical noise radar ones, permits a reduction in terms of hardware complexity, especially for long term integration processes.
Let us consider, for example, the case described in [
18]: here, with an integration time of 80 ms and a sampling time equal to 0.5 ns, it would be required a matched filter or a fast Fourier transform (FFT) with
coefficients while using the proposed approach only a set of
calculus units is needed (order of some hundreds, depending on the range profile length).
Moreover, in the latter case, the integration time is limited by the number of bits used in the digital integrator of the FPGA-based correlator.
The main issue in this architecture is given by scatterers showing time misalignments of a fraction of the sampling interval respect to the reference values used in the correlator. This problem could be overcome by decreasing the time distances between consecutive range cells, i.e., by generating a reference signal equal to , where and . Given the same range profile length, this procedure increases the number of range cells needed in the correlator but, in general, the hardware complexity still remains lower than a typical matched filter.
In the remainder of this paper the receiving section is dimensioned according to the parameters of
Table 3 (theoretically, in presence of a couple of scatterers and considering the ACF triangular shape described in
Appendix A, we would be able to distinguish the two different correlation peaks if the latter show a relative delay of at least one chip, hence we considered a resolution equal to
; the selected value for the chip duration,
, gives a range resolution which is roughly one order of magnitude lower than the HRRP definitions suggested by some authors, e.g. [
26], hence the value of 40 ns was actually chosen according to the equipment at our disposal for the laboratory tests of
Section 5 but, in any case, better performances in terms of range resolution can be achieved with a larger bandwidth).
6. Discussion
As already stated in the previous Sections, to obtain high resolution range profiles, waveforms with narrow peak of the ACF and low time sidelobes are typically needed [
31]. In technical literature several items ensuring these two properties can be found [
32,
33,
34,
35]. They basically tend to achieve a narrow ACF peak by keeping the PSLR as low as possible. In this context, a comparison of the waveform proposed by this paper (i.e., PN22) with respect to other ones can be done. Using a simulation approach, five terms of comparison are taken into account:
pure unimodular noise;
linear chirp;
non linear frequency modulation (NLFM) signal;
hybrid non linear frequency modulation (HNLFM) signal;
Barker code with 13 symbols;
Frank code with phase symbols.
Once the BW is set, the direct consequence is a fixed resolution. To guarantee a fair comparison, all the waveforms were defined on the same − 3dB BW, 35 MHz, and on the same integration time, T = 50 s (i.e., an equal compression ratio, ).
In the pure unimodular noise waveform, based on the model of [
24,
34], the I and Q samples were obtained through a white Gaussian random process and the resulting signal was filtered using a rectangular-shaped filter. The linear chirp, the NLFM and the HNLFM waveforms were simulated using the same compression ratio; in particular, the second and the third ones, were created using the parameters found in [
33]. The difference between the NLFM and the HNLFM is that the latter also shows a specific amplitude modulation.
The last two codes, i.e., Barker and Frank, were generated considering the same chip width of the PN sequence proposed in
Section 2; in this way the constraint related to the BW was respected.
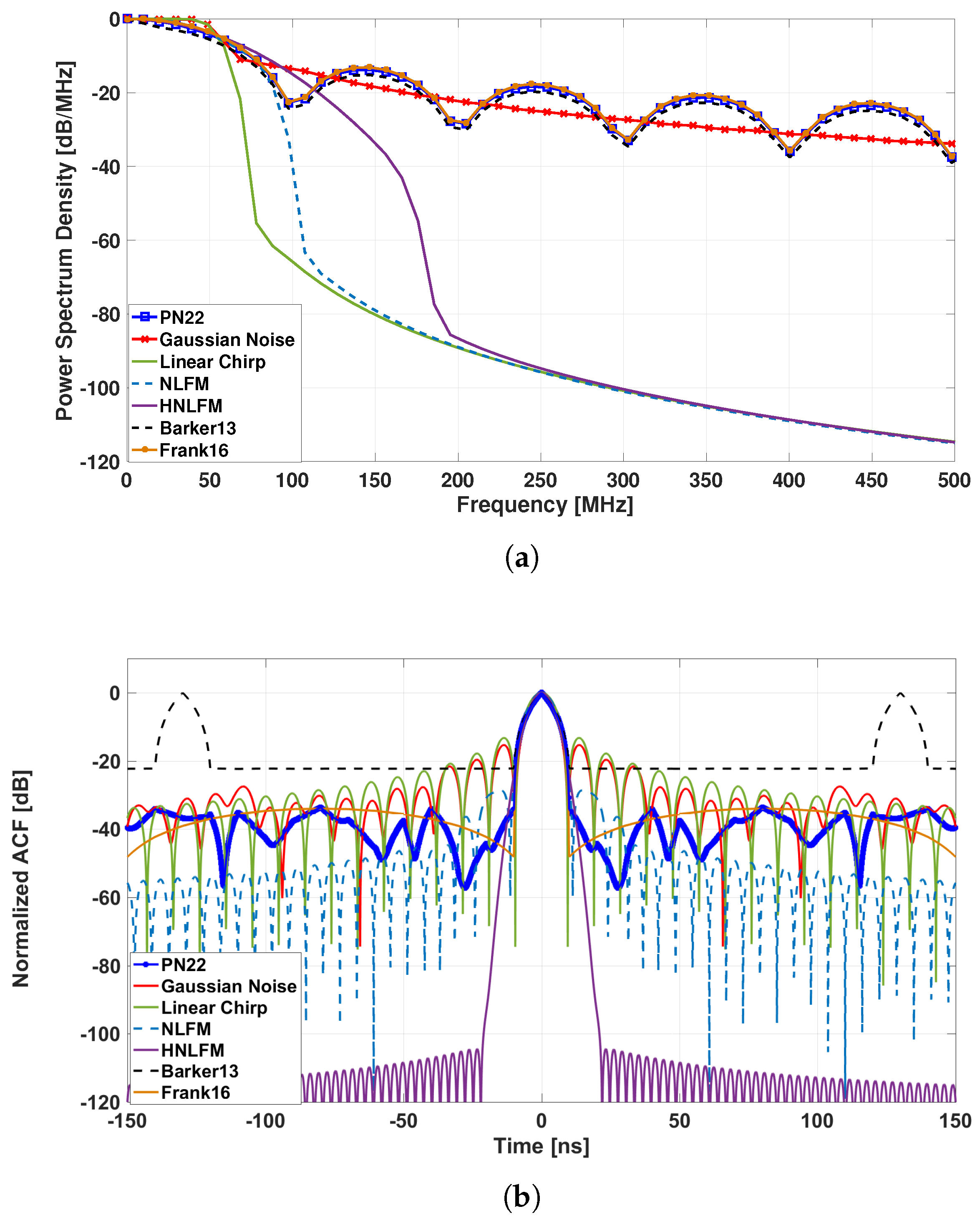
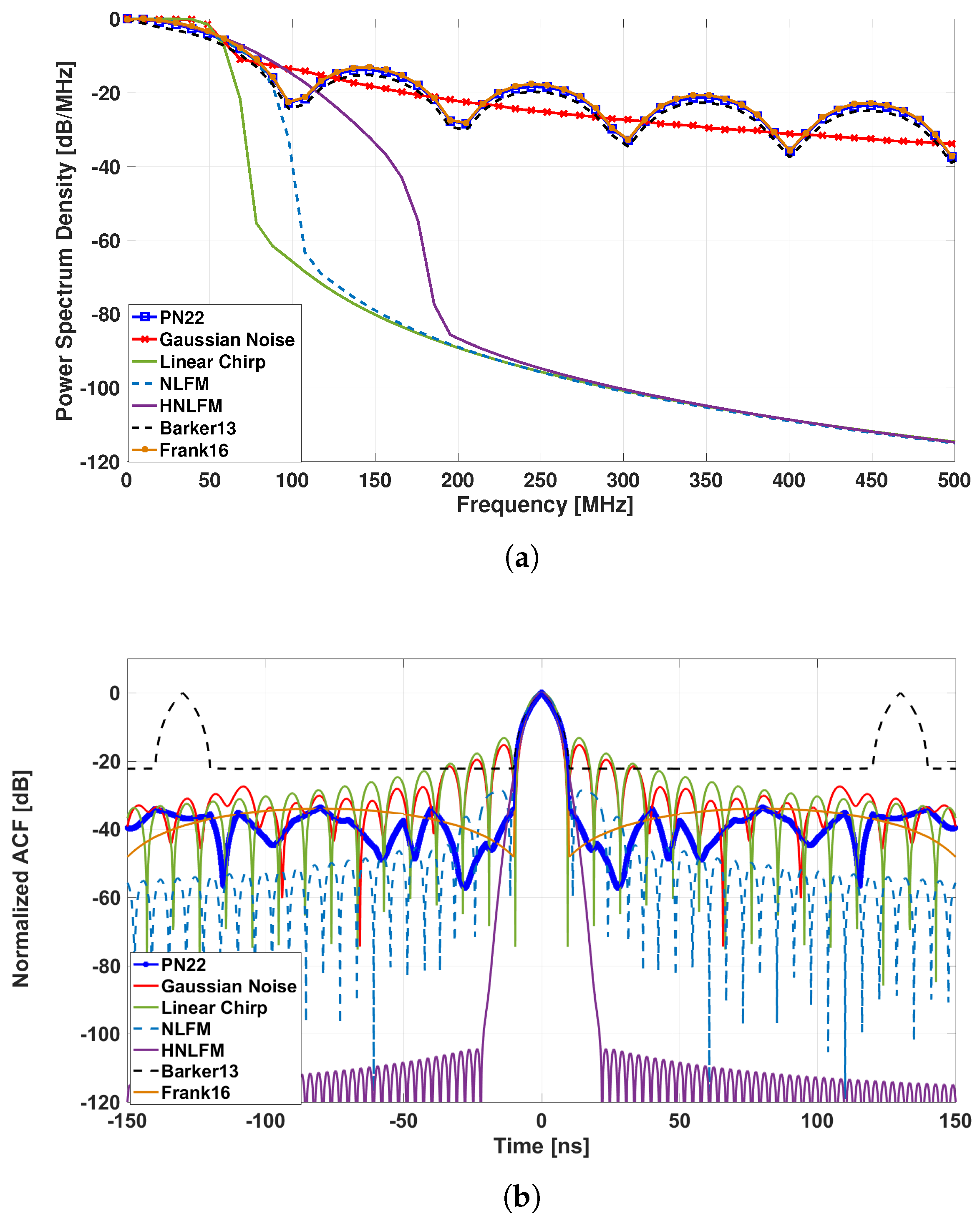
The power spectrum density (PSD) and the ACF of the tested sequences are shown in
Figure 14. The pure unimodular noise waveform and the chirp signal, having similar PSDs, show the same behavior in terms of resolution (intended as the main lobe width) equal to
= 10 ns and of PSLR, 15 dB for the first and 13 dB for the second (the difference is given by the non-perfect rectangular shape of the low-pass filtering). With respect to the PN22 sequence, the chirp signal has a limited duration (equal to
T) while the noise-like waveform would require a more complex digital generation scheme.
The NLFM shows improved performances in terms of PSLR with respect to the linear case (29 dB compared to 13 dB obtained with the linear chirp).
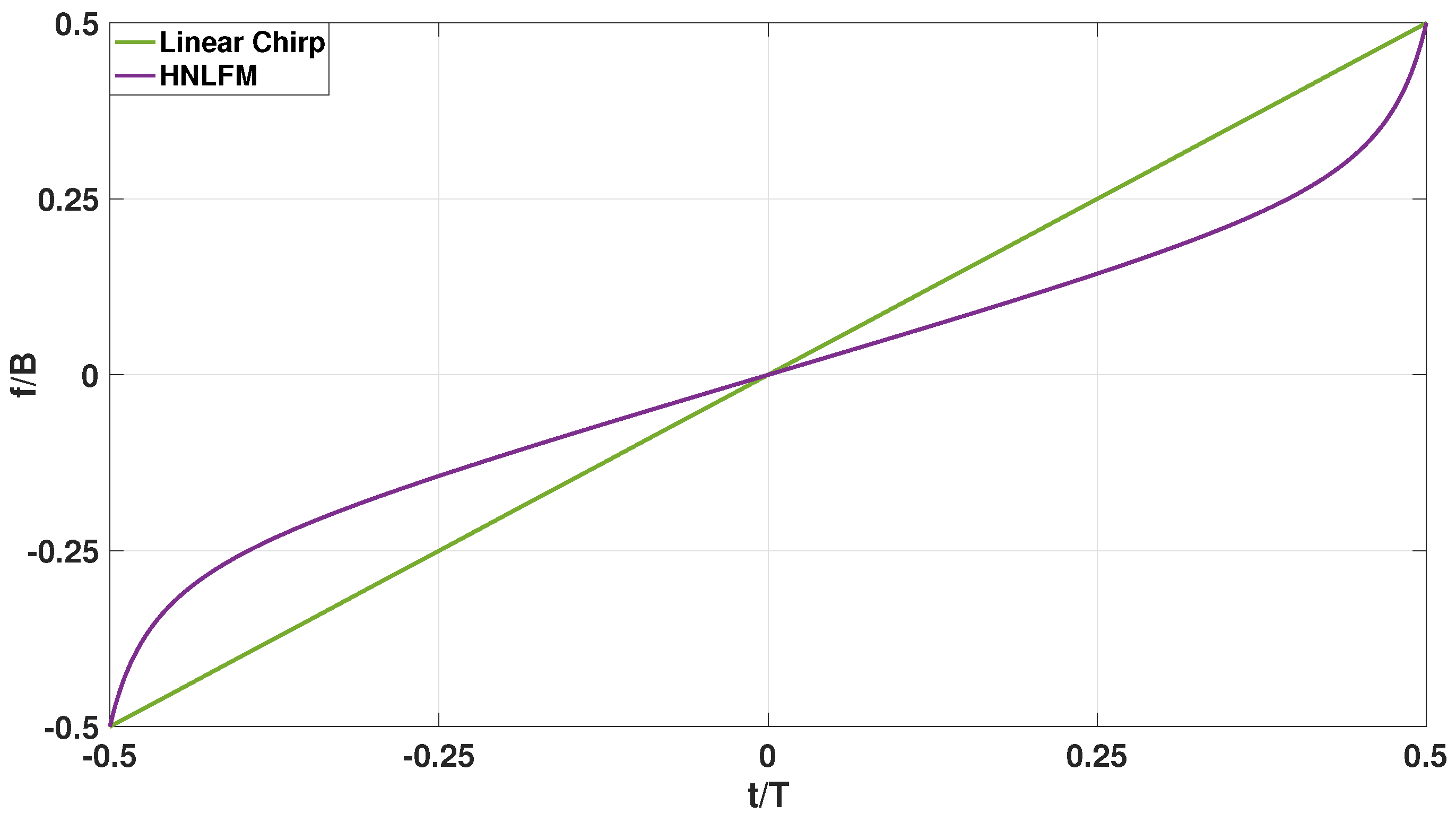
For what concerns the HNLFM waveform a good PSLR value was got (i.e., 104 dB with respect to PN22, where it is equal to 34 dB) but a higher complexity is needed in the signal generation phase: in fact an amplitude modulation is required and it causes a loss of efficiency in the transmitter. Given the deterministic nature of the HNLFM it is easier to intercept it with respect to a noisy waveform. Furthermore, the period of this code is limited to the integration time
T; in fact, both for the linear and for the non linear chirps, the modulating sequence will repeat every
T seconds (see
Figure 15) and this causes an ambiguity in range.
In terms of resolution, the Barker 13 sequence has the same behavior of the PN22 but limited performances if we consider the code period (only 13 symbols) and the PSLR (22.3 dB).
Similar issues are present in the last comparison between the PN22 and the Frank code: this latter was generated with a phase quantum of corresponding to 4 bits of quantization (256 total symbols). This constraint was imposed in order to be coherent with the PN22 generation (quantized using 4 bits). These two signals have similar performances both in terms of resolution and of PSLR but the Frank code is limited by the repetition period, equal to = 256 chips.
In general, a disadvantage of pseudo-random signals with respect to deterministic ones resides in the optimization of the single waveform: in fact, in NRT field, we define a “family” of signals rather than the specific waveform.
Table 4 summarizes the advantages/disadvantages of each of the tested waveforms in terms of main lobe width, PSLR, repetition period and complexity in the generation phase.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}