Multi-UAV Doppler Information Fusion for Target Tracking Based on Distributed High Degrees Information Filters



Abstract
1. Introduction
2. Multiple Sensors Modeling
2.1. Doppler Measurement Model
2.2. Nonlinear Filtering Problem Statement
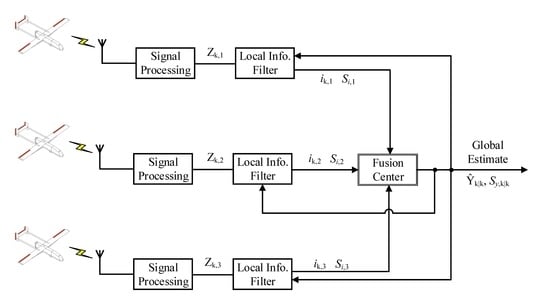
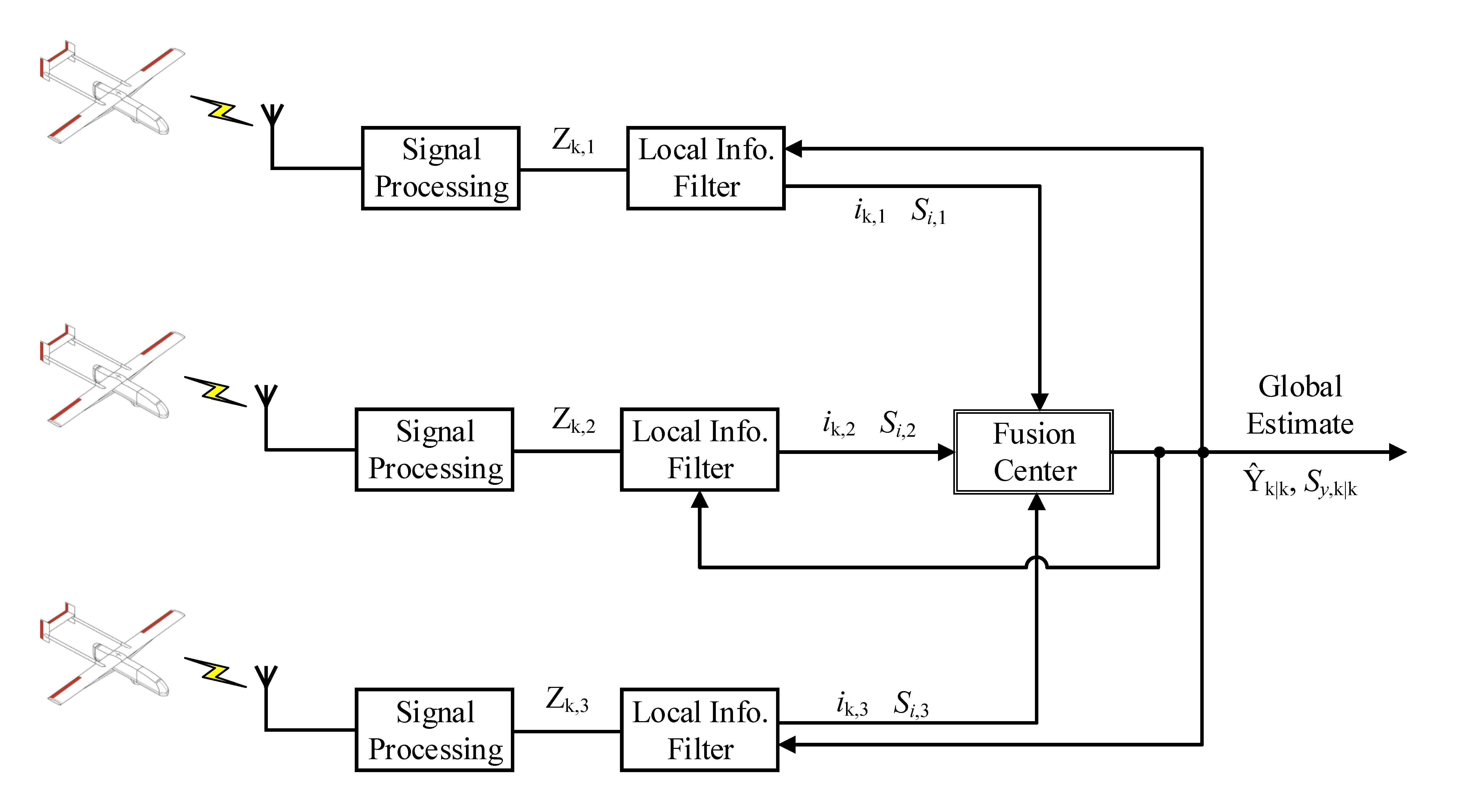
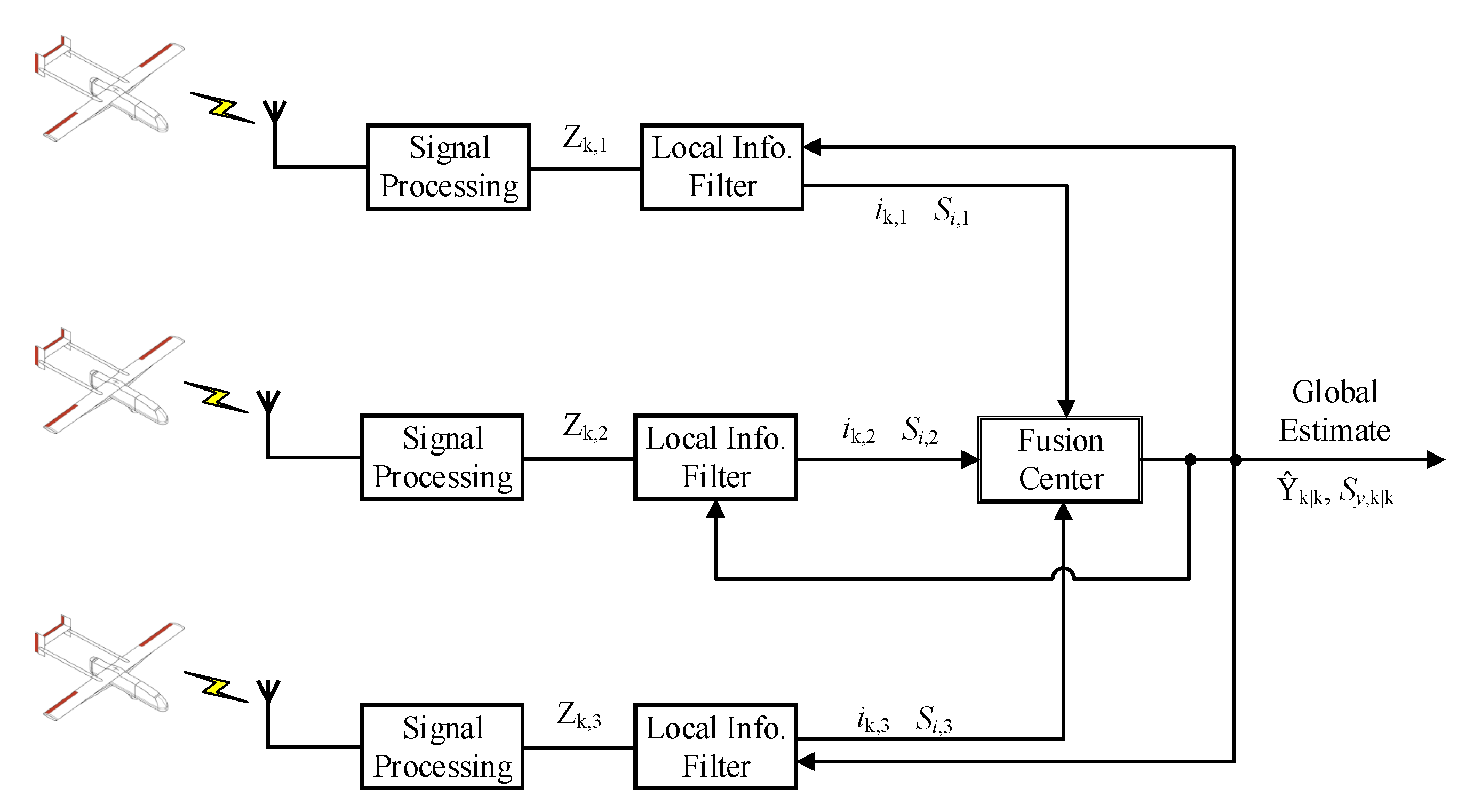
2.3. Multi-Sensor Information Fusion
2.4. Multiple Quadrature Information Filters
- A Gauss–Hermite and 3rd-degree-based KF
- A Gauss–Hermite 5th-degree-based KF
- A varying 5th-degree cubature rules KF—Version 1
- A varying 5th-degree cubature rules KF—Version 2
- A varying 5th-degree cubature rules KF—Version 2
- A kind of 7th-degree cubature rules KF— 7th SSRCKF (7th spherical simplex radial cubature Kalman filter)
2.4.1. Gaussian Nonlinear Filters
2.4.2. Gauss Multiple Quadrature Kalman Filters
- a
- Initialization:
- Assume at time k that the posterior density function is known. Cholesky factorization can be given as follows:
- b
- Time update:
- c
- Measurement update step:
- The Cholesky factorization , the quadrature points , the predicted measurement , the average prediction , the innovation covariance matrix , the cross-covariance matrix , the quadrature Kalman gain , the state , and the error covariance are updated as follows:
3. Gaussian Points Information Filters Derivation
3.1. Sensor Fusion and Selected Approach
- a
- Prediction step:where are the transformed points obtained from the covariance decomposition; i.e.,
- b
- Update step:For multiple-sensor information fusion, the state and the information matrix can be updated by Equations (24) and (25):where is the number of sensors, and are the information state contribution and the information matrix contribution of the mth sensor, respectively. In the EIF framework [5,16], they are defined as:where and are the mth measurement function and the associated Jacobian matrix at time k, respectively; is the covariance of the measurement noise corresponding to the mth measurement equation.
3.2. High-Degree Cubature Information Filters
4. Seventh-Fifth Degree Spherical-Radial Rule: Genz–Stroud–Mysovskikh (1981)
5. Simulation
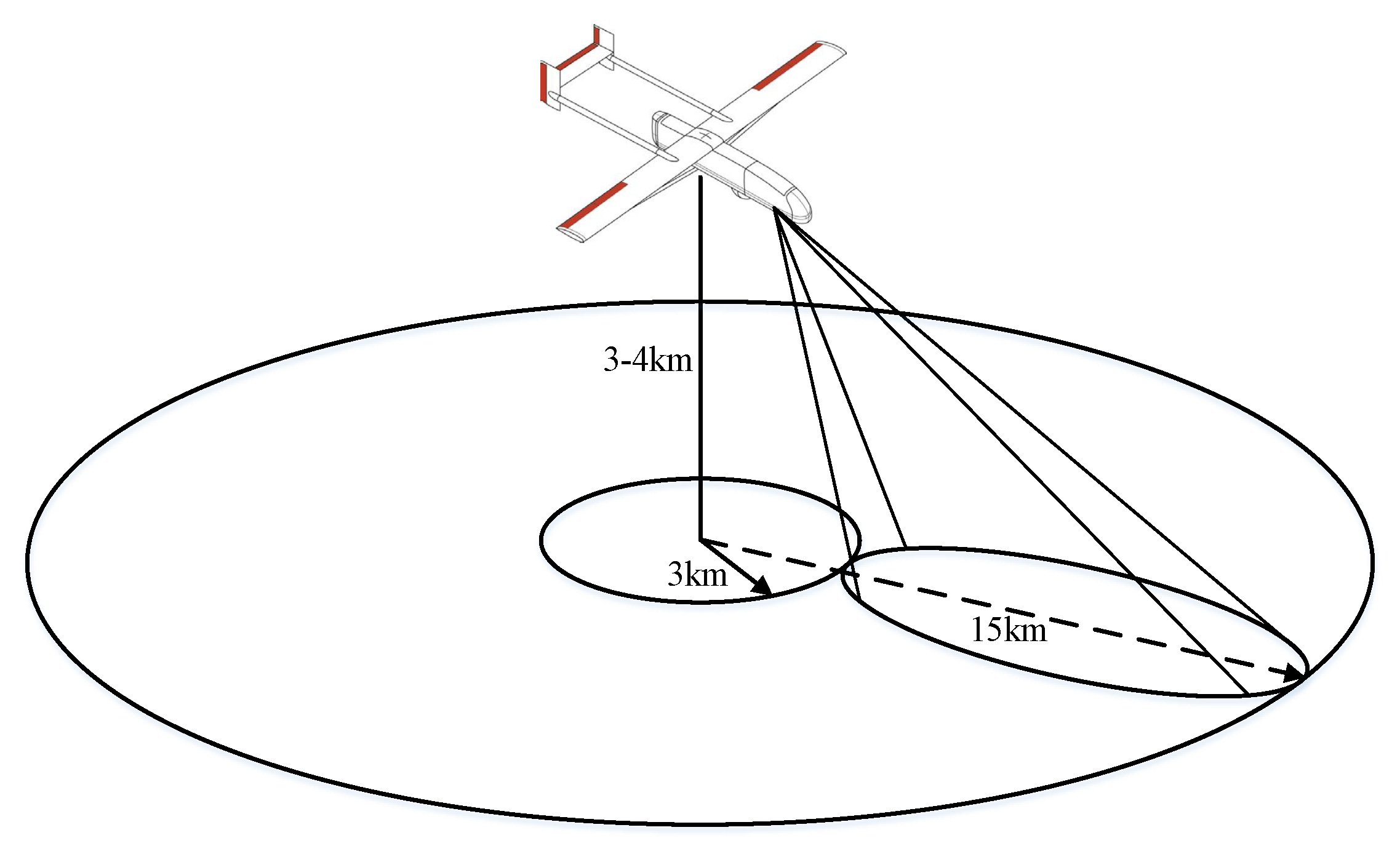
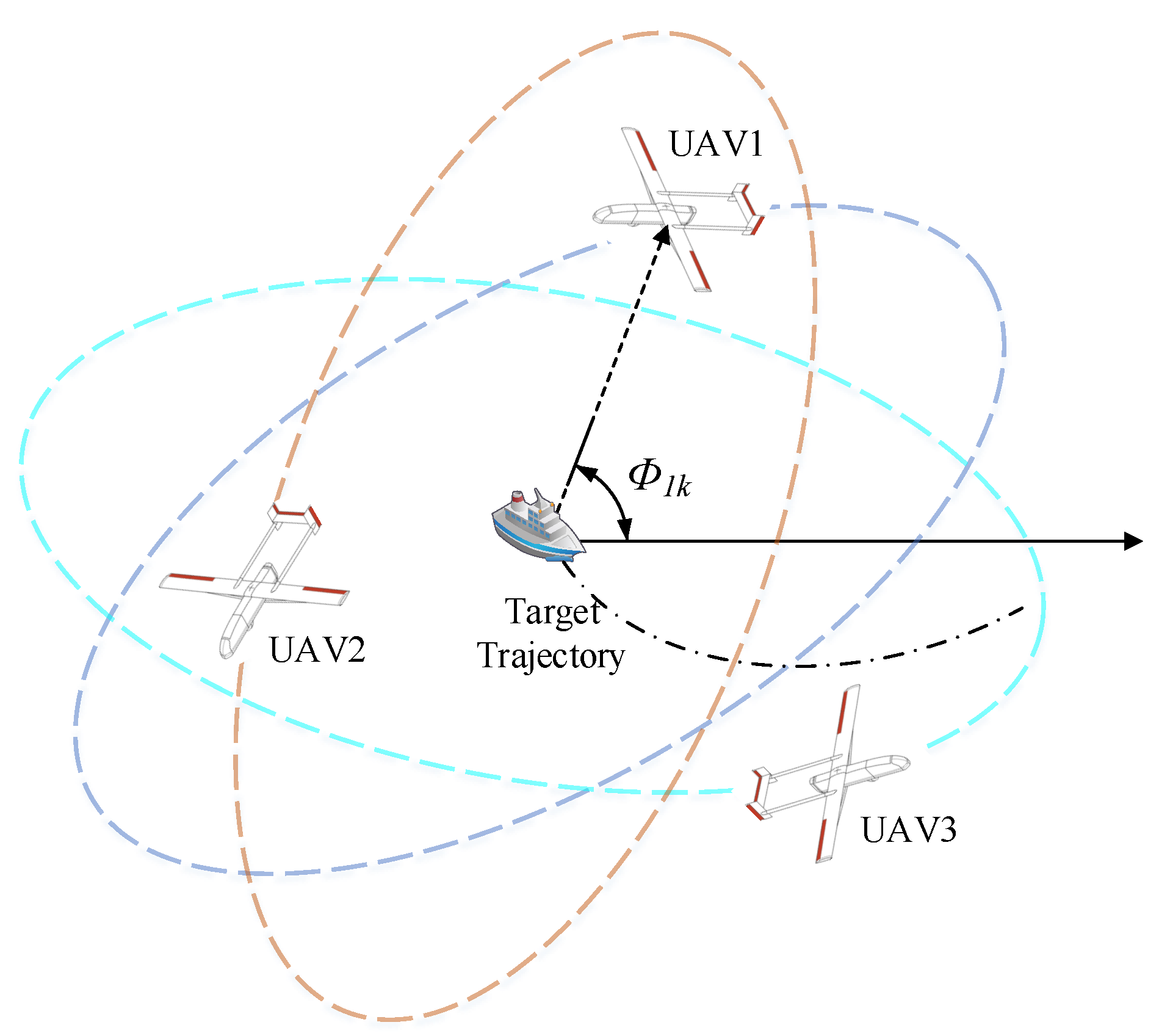
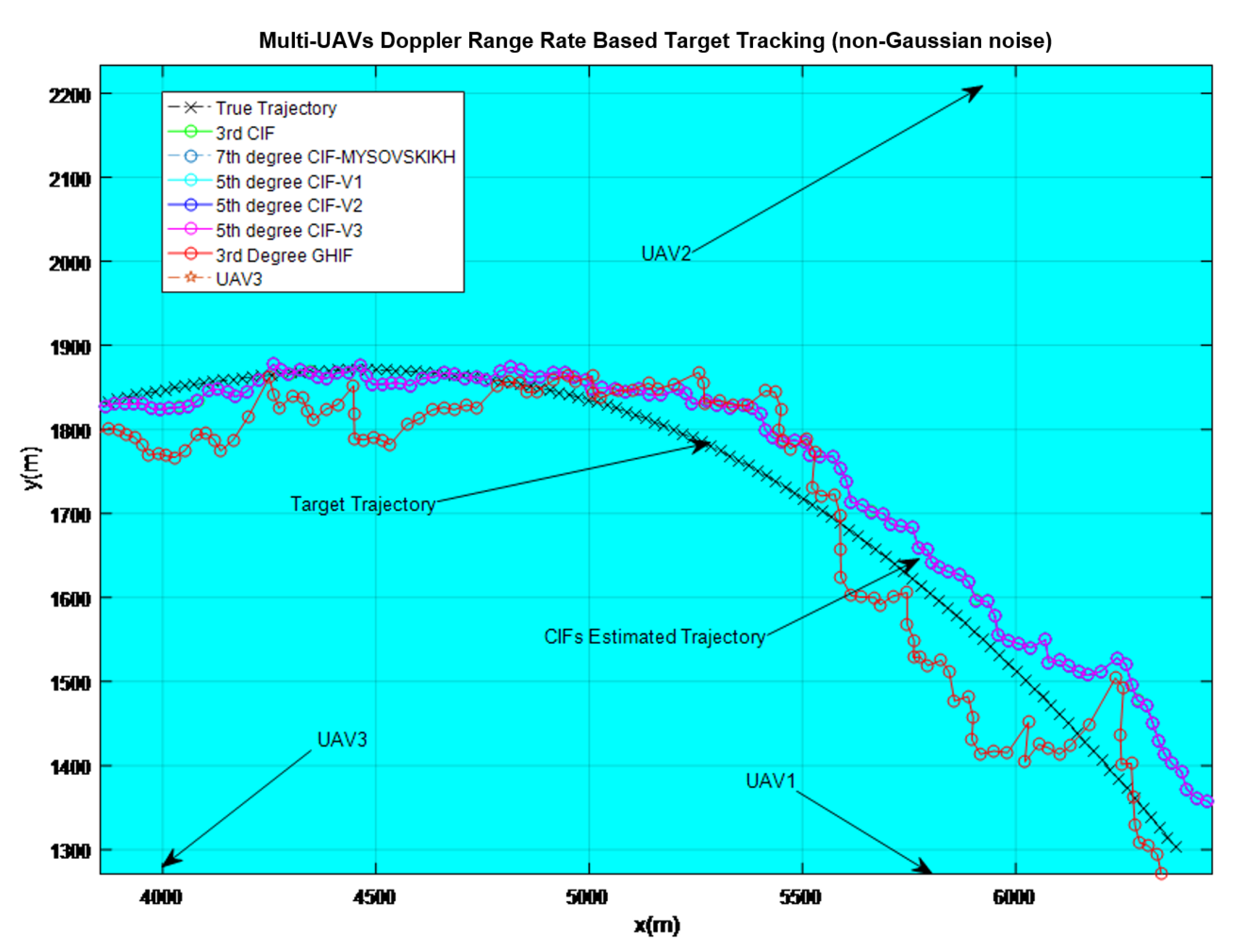
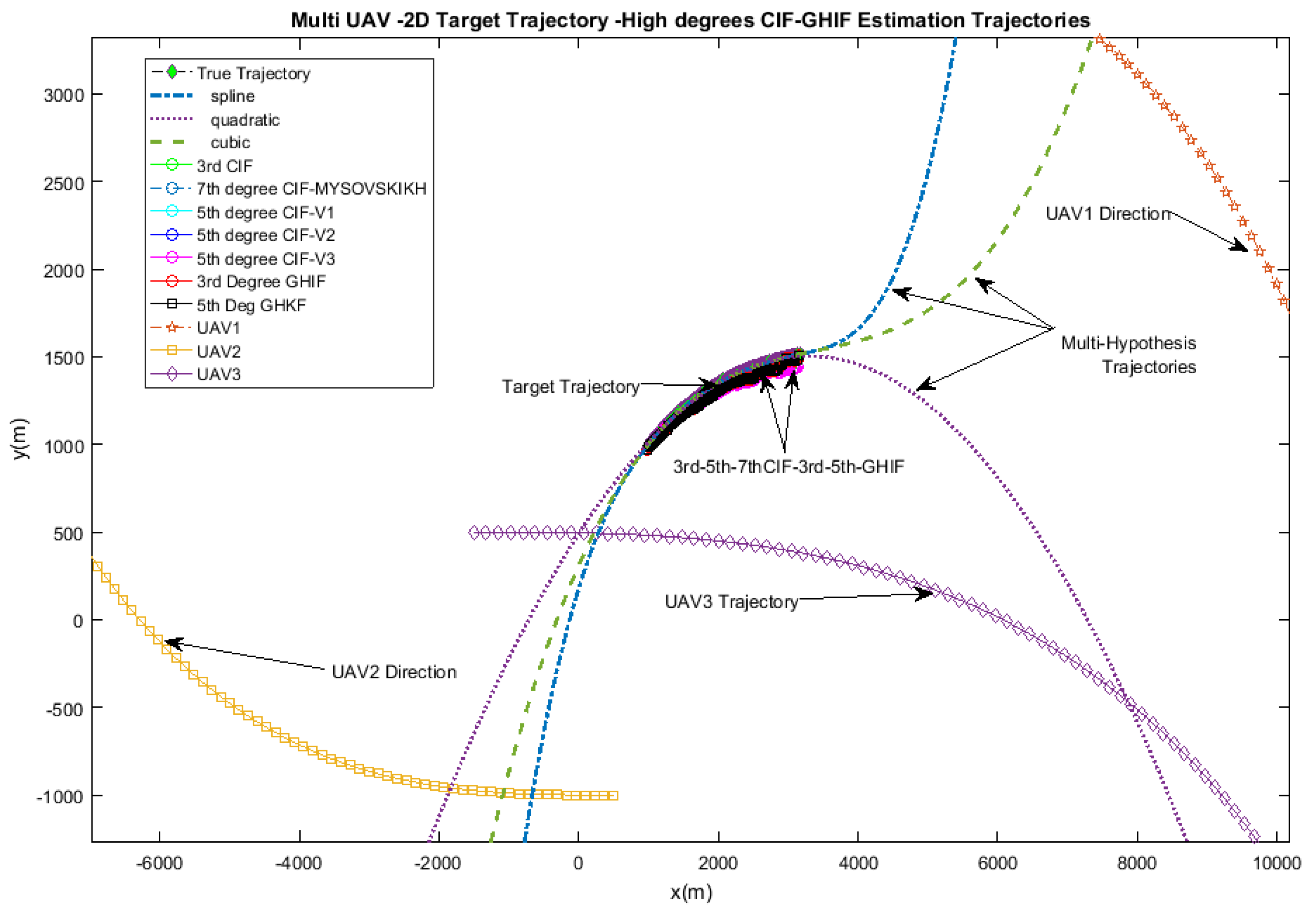
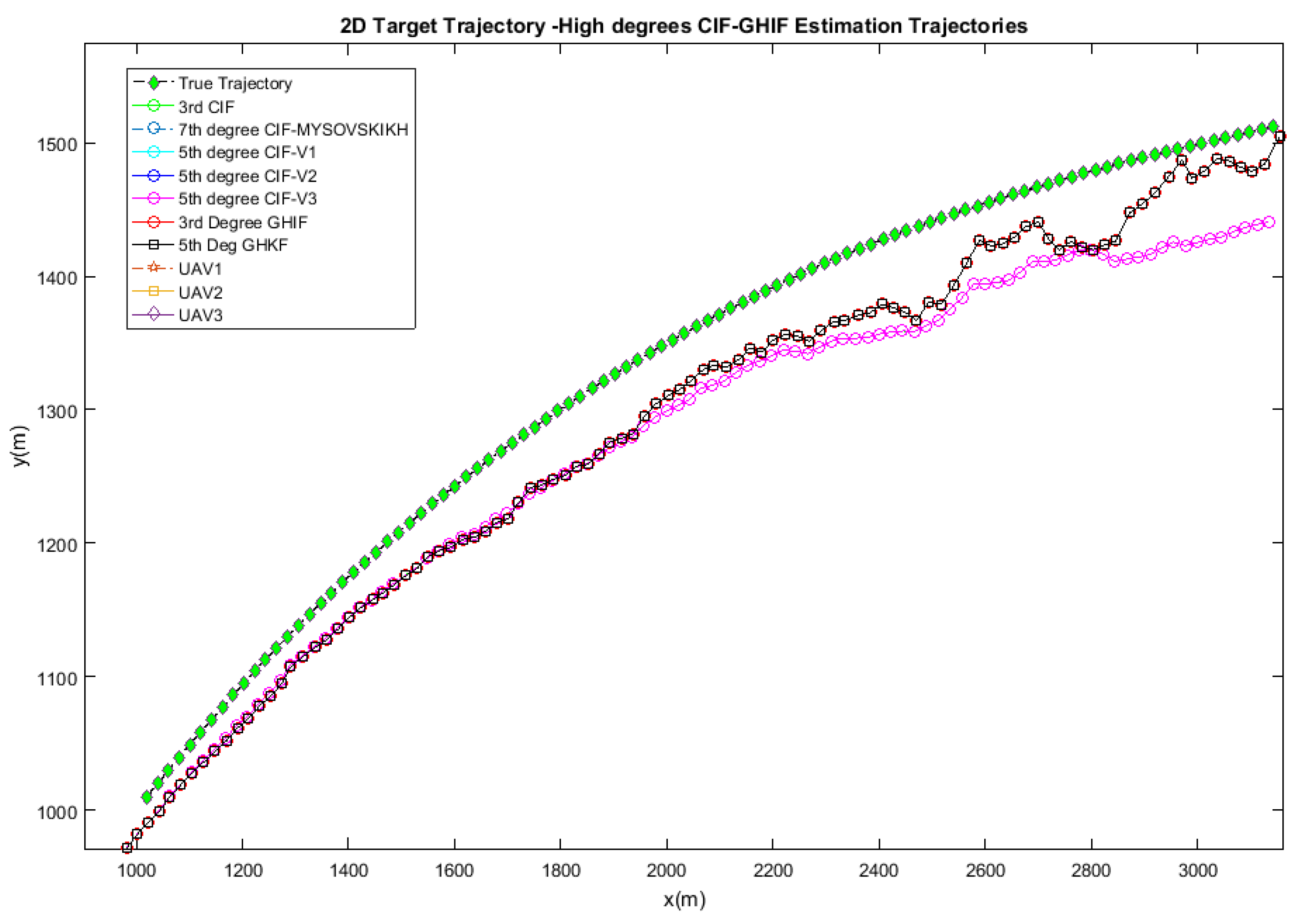
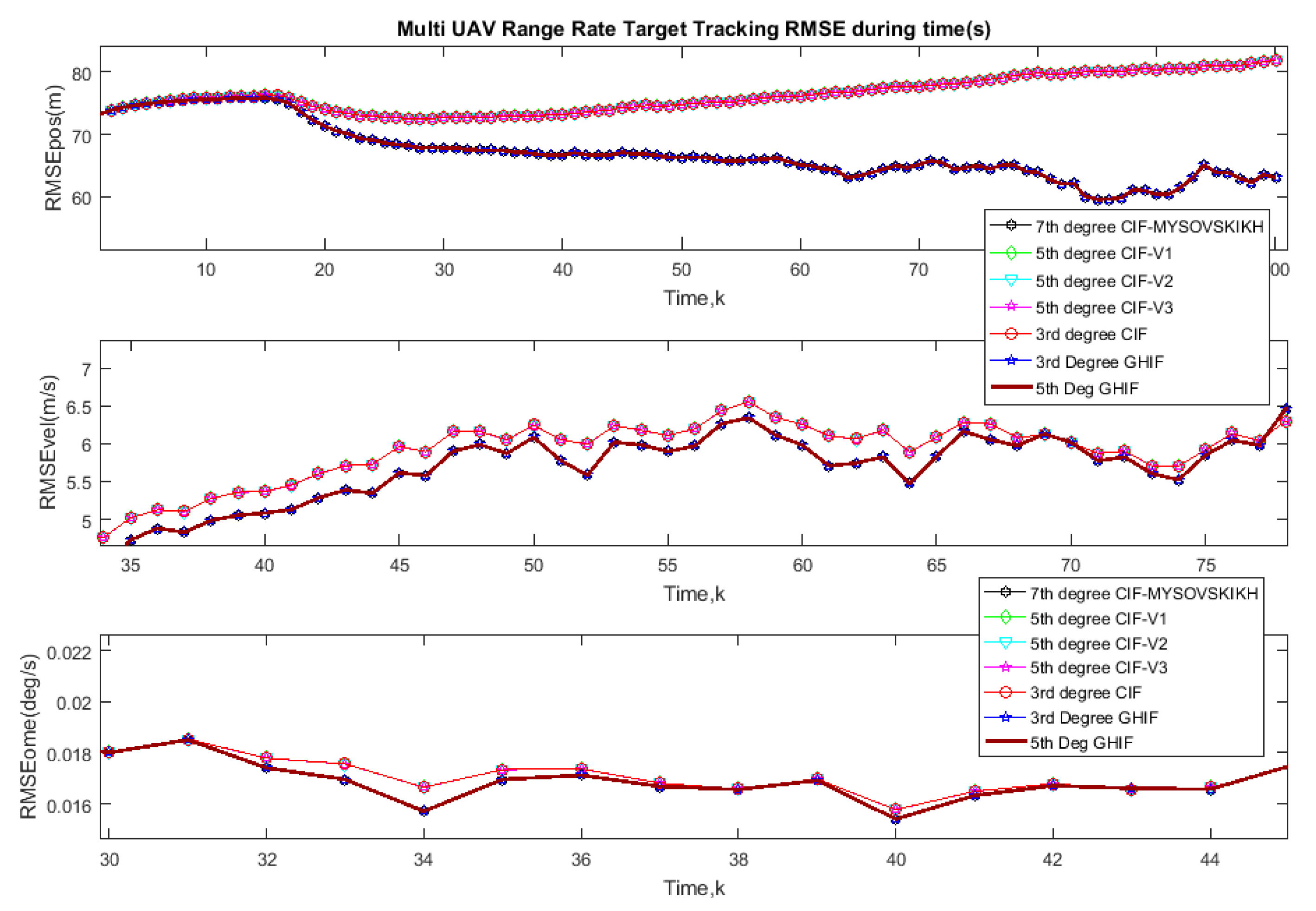
5.1. Multi-UAVs Range-Rate-Only Target Tracking
5.1.1. Extended Results for Range Rate Doppler Tracking
5.1.2. Range Rate Observation
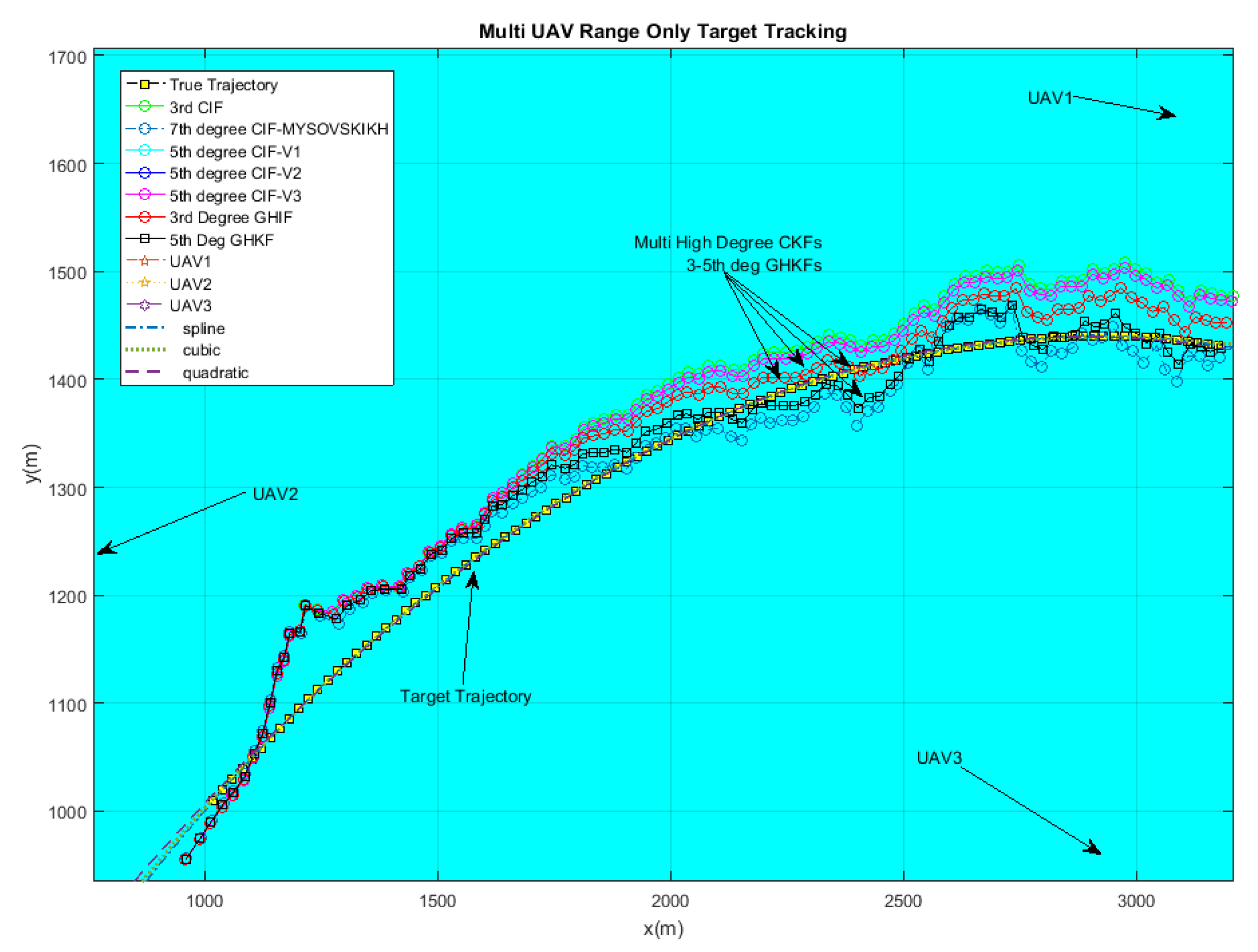
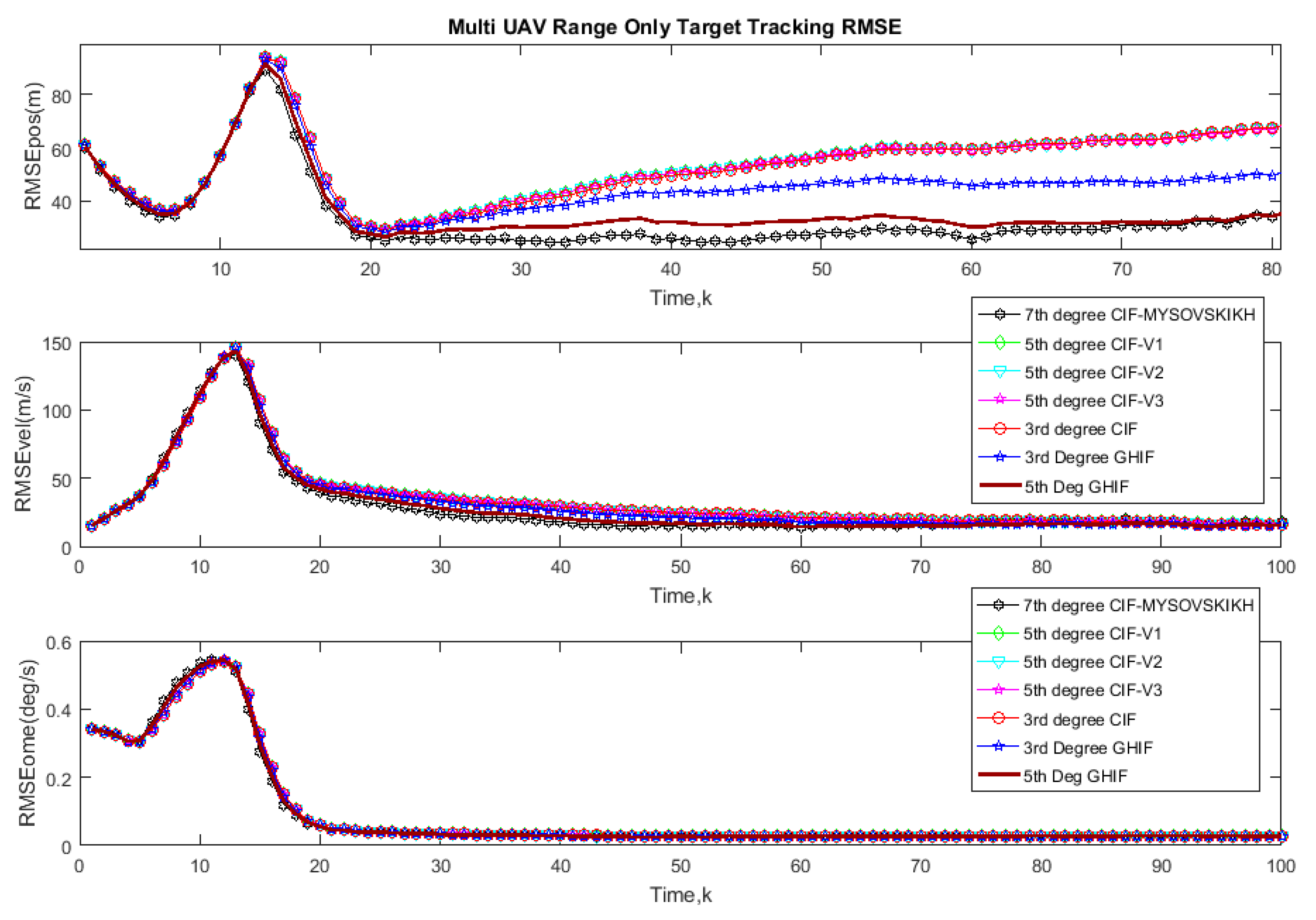
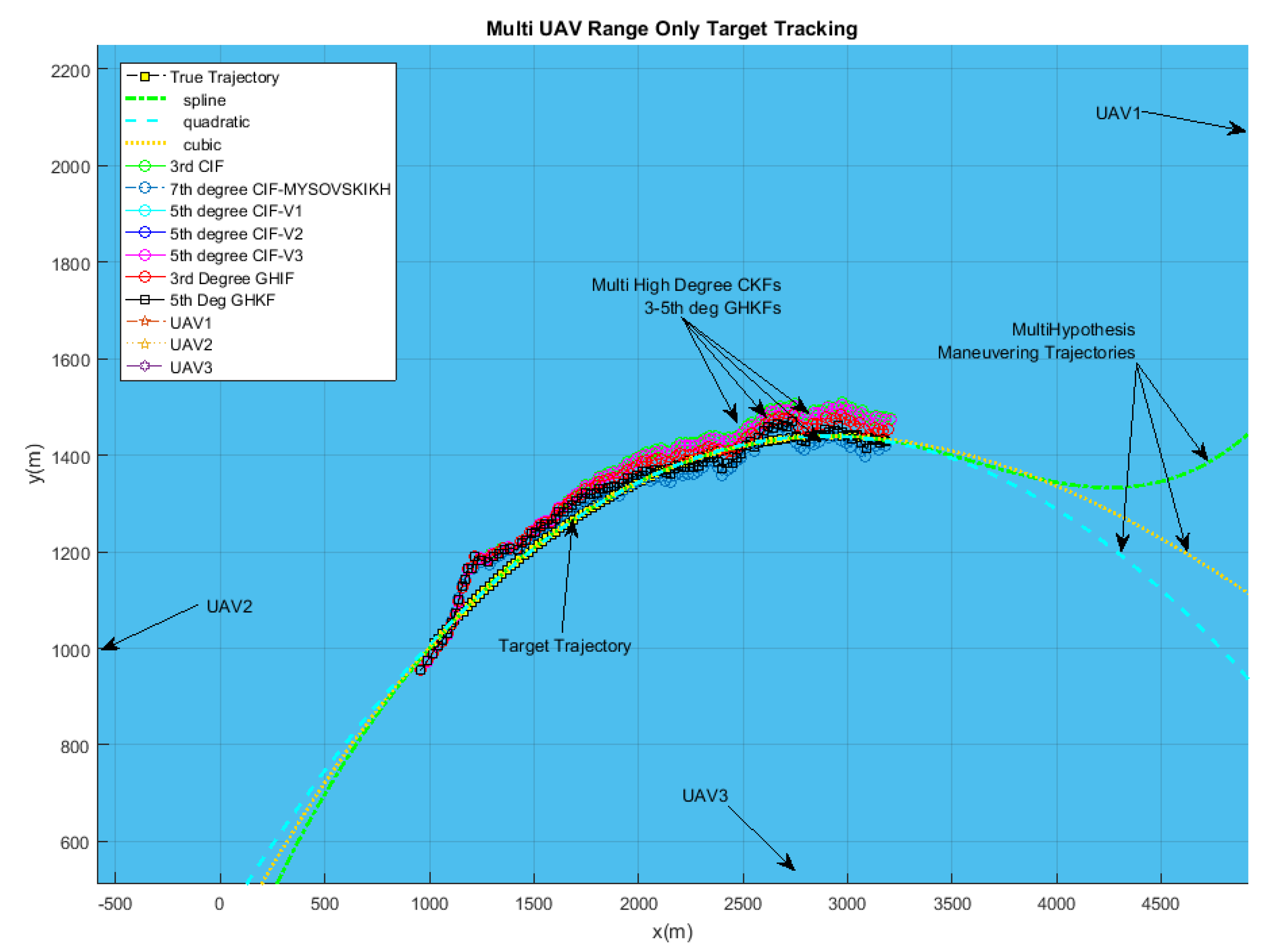
5.2. Multi-UAVs Range-Only Target Tracking
5.3. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jia, B.; Xin, M.; Pham, K.; Blasch, E.; Chen, G. Multiple Sensor Estimation Using A High-Degree Cubature Information Filter. In Proceedings of the SPIE Defense, Security, and Sensing 2013, Baltimore, MD, USA, 29 April–3 May 2013. [Google Scholar]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2012, 49, 510–518. [Google Scholar] [CrossRef]
- Benzerrouk, H.; Nebylov, A.; Salhi, H. Contribution in Information Signal Processing for Solving State Space Nonlinear Estimation Problems. J. Signal Inf. Process. 2013, 4, 375–384. [Google Scholar] [CrossRef][Green Version]
- Jia, B.; Xin, M. Multiple sensor estimation using a new fifth-degree cubature information filter. Trans. Inst. Meas. Control 2015, 37, 15–24. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. Multiple sensor estimation using the sparse Gauss-Hermite quadrature information filter. In Proceedings of the American Control Conference (ACC 2012), Montreal, QC, Canada, 27–29 June 2012; pp. 5544–5549. [Google Scholar]
- Elling, L. Analysis of Interacting Multiple Model-extended Kalman Filters at High Update Rates; Nederlandse Defensie Academie: Den Haag, The Netherlands, 2015. [Google Scholar]
- Ahmed, M.; Subbarao, K. Target Tracking in 3-D Using Estimation Based Nonlinear Control Laws for UAVs. Aerospacee 2016, 3, 5. [Google Scholar] [CrossRef]
- Schwartz, C.E.; Bryant, T.G.; Cosgrove, J.H.; Morse, G.B.; Noonan, J.K. A Radar for Unmanned Air Vehicles. Linc. Lab. J. 1990, 3, 119–143. [Google Scholar]
- Göktoǧan, A.H.; Brooker, G.; Sukkarieh, S. A compact millimeter wave Radar sensor for unmanned air vehicles. Field Serv. Robot. 2006, 24, 311–320. [Google Scholar]
- Ren, X.; Qin, Y.; Qiao, L. A novel 3D imaging method for airborne downward-looking sparse array SAR based on special squint model. Int. J. Antennas Propag. 2014, 2014, 982014. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Mittermaier, T.J.; Siart, U.; Eibert, T.F.; Bonerz, S. Extended Kalman Doppler tracking and model determination for multi-sensor short-range Radar. Adv. Radio Sci. 2016, 14, 39–46. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Benzerrouk, H.; Nebylov, A.; Salhi, H.; Closas, P. MEMS IMU/ZUPT Based Cubature Kalman Filter Applied to Pedestrian Navigation System. Conference Proceedings Paper–Sensors and Applications 2014. Available online: http://sciforum.net/conference/ecsa-1/paper/2395/download/manuscript.pdf (accessed on 1 June 2014).
- Lee, D.J. Nonlinear estimation and multiple sensor fusion using unscented information filtering. IEEE Signal Process Lett. 2008, 15, 861–864. [Google Scholar] [CrossRef]
- Benzerrouk, H. Modern Approaches in Nonlinear Filtering Theory Applied to Original Problems of Aerospace Integrated Navigation Systems with non-Gaussian Noises; Saint Petersburg State University: Sankt-Peterburg, Russia, 2014. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filtering. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Sarkka, S.; Hartikainen, J. On Gaussian optimal smoothing of nonlinear state space models. IEEE Trans. Autom. Control 2010, 55, 1938–1941. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. High-degree cubature joint probabilistic data association information filter for multiple sensor multiple target tracking. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 304–309. [Google Scholar]
- Dobrodeev, L.N. Cubature Rules with Equal Coefficients for Integrating Functions with Respect to Symmetric Domains. Comput. Math. Math. Phys. 1979, 18, 27–34. [Google Scholar] [CrossRef]
- Mysovskikh, I.P. The approximation of multiple integrals by using interpolatory cubature formulae. In Quantitative Approximation; Devore, R.A., Scherer, K., Eds.; Academic Press: New York, NY, USA, 1980; pp. 217–243. [Google Scholar]
- Genz, A.; Monahan, J. A Stochastic Algorithm for High Dimensional Multiple Integrals over Unbounded Regions with Gaussian Weight. J. Comp. Appl. Math 1999, 112, 71–81. [Google Scholar] [CrossRef]
- Lanillos, P.; Gan, S.K.; Besada-Portas, E.; Pajares, G.; Sukkarieh, S. Multi-UAV target search using decentralized gradient-based negotiation with expected observation. Inf. Sci. 2014, 282, 92–110. [Google Scholar] [CrossRef]
- Jamieson, J.; Biggs, J. Path Planning Using Concatenated Analytically-Defined Trajectories for Quadrotor UAVs. Aerospace 2015, 2, 155–170. [Google Scholar] [CrossRef]
- Chahl, J. Unmanned Aerial Systems (UAS) Research Opportunities. Aerospace 2015, 2, 189–202. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, M.; Zheng, Y.R. Task Assignment and Path Planning for Multiple Autonomous Underwater Vehicles Using 3D Dubins Curves. Sensors 2017, 17, 1607. [Google Scholar] [CrossRef] [PubMed]
- Itkin, M.; Kim, M.; Park, Y. Development of Cloud-Based UAV Monitoring and Management System. Sensors 2016, 16, 1913. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Darmofal, D.L. Higher-dimensional integration with Gaussian weight for applications in probabilistic design. SIAM J. Sci. Comput. 2005, 2, 613–624. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Distributed Kalman filtering for sensor networks. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Closas, P.; Prades, C.F.; Vails, J.V. Multiple quadrature Kalman filtering. IEEE Trans. Signal Process. 2012, 60, 6125–6137. [Google Scholar] [CrossRef]
- Sobolev, S.L. Cubature formulas on the sphere invariant under finite groups of rotations. Dokl. Akad. Nauk SSSR 1962, 146, 310–313. [Google Scholar]
- Stoyanova, S.B. Cubature formulae of the seventh degree of accuracy for the hypersphere. J. Comput. Appl. Math. 1997, 84, 15–21. [Google Scholar] [CrossRef]
- George, D.E.; Unnikrishnan, A. On the divergence of information filter for multi sensors fusion. Inf. Fusion 2016, 27, 76–84. [Google Scholar] [CrossRef]
- Heredia, G.; Caballero, F.; Maza, I.; Merino, L.; Viguria, A.; Ollero, A. Multi-Unmanned Aerial Vehicle (UAV) Cooperative Fault Detection Employing Differential Global Positioning (DGPS), Inertial and Vision Sensors. Sensors 2009, 9, 7566–7579. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Xie, L.; Xu, J.; Xu, Z. Multi-Agent Cooperative Target Search. Sensors 2014, 14, 9408–9428. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Huang, Y.; Li, N.; Zhao, L. Interpolatory cubature Kalman filters. IET Control Theory Appl. 2015, 9, 1731–1739. [Google Scholar] [CrossRef]
- Meng, Z.; Luo, Z. Constructing cubature formulae of degree 5 with few points. J. Comput. Appl. Math. 2013, 237, 354–362. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Wu, Z.; Li, N. Seventh-degree spherical simplex-radial cubature Kalman filter. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014. [Google Scholar]
- Meng, D.; Miao, L.; Shao, H.; Shen, J. A Seventh-Degree Cubature Kalman Filter. Asian J. Control 2018, 20, 250–262. [Google Scholar] [CrossRef]
- Kou, Y.; Zhang, H. Sample-wise aiding in GPS/INS ultra-tight integration for high-dynamic, high-precision tracking. Sensors 2016, 16, 519. [Google Scholar] [CrossRef] [PubMed]
- Bischof, C.; Schön, S. Vibration detection with 100 Hz GPS PVAT during a dynamic flight. Adv. Space Res. 2017, 59, 2779–2793. [Google Scholar] [CrossRef]
- Salamat, B.; Tonello, A.M. Stochastic Trajectory Generation Using Particle Swarm Optimization for Quadrotor Unmanned Aerial Vehicles (UAVs). Aerospace 2017, 4, 27. [Google Scholar] [CrossRef]
- Kikutis, R.; Stankunas, J.; Rudinskas, D.; Masiulionis, T. Adaptation of Dubins Paths for UAV Ground Obstacle Avoidance When Using a Low Cost On-Board GNSS Sensor. Sensors 2017, 17, 2223. [Google Scholar] [CrossRef] [PubMed]
- Benzerrouk, H. Gaussian vs. Non-Gaussian noise in inertial/GNSS integration. GNSS Solut. Inside GNSS Mag. 2012, 32–39. [Google Scholar]
- Schlee, F.H.; Standish, C.J.; Toda, N.F. Divergence in the Kalman filter. AIAA J. 1967, 5, 1114–1120. [Google Scholar] [CrossRef]
- Li, W.; Zhang, H.; Osen, O.L. A UAV SAR Prototype for Marine and Arctic Application. In Proceedings of the ASME 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Mysovskikh, I.P. Interpolatory Cubature Formulas; Nauka: Moscow, Russia, 1981. (in Russian) [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quadrature Rule | Quadrature Points Number |
|---|---|
| 3-point GHKF | |
| 5-point GHKF | |
| 3rd-degree CKF | |
| 5th-degree CKF-V1 | |
| 5th-degree CKF-V2 | |
| 5th-degree CKF-V3 | |
| 5th-degree CKF-V4 | |
| 7th-degree CKF |
| Quadrature Rule | Quadrature Points Number | Execution Time (ms) |
|---|---|---|
| 3-point GHKF | 243 | 16.1 |
| 5-point GHKF | 3125 | 206.0 |
| 3rd-degree CKF | 10 | 0.8 |
| 5th-degree CKF-V1 | 43 | 2.2 |
| 5th-degree CKF-V2 | 51 | 1.8 |
| 5th-degree CKF-V3 | 51 | 1.6 |
| 5th-degree CKF-V4 | 32 | 1.4 |
| 7th-degree CKF | 284 | 9.2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benzerrouk, H.; Nebylov, A.; Li, M. Multi-UAV Doppler Information Fusion for Target Tracking Based on Distributed High Degrees Information Filters. Aerospace 2018, 5, 28. https://doi.org/10.3390/aerospace5010028
Benzerrouk H, Nebylov A, Li M. Multi-UAV Doppler Information Fusion for Target Tracking Based on Distributed High Degrees Information Filters. Aerospace. 2018; 5(1):28. https://doi.org/10.3390/aerospace5010028
Chicago/Turabian StyleBenzerrouk, Hamza, Alexander Nebylov, and Meng Li. 2018. "Multi-UAV Doppler Information Fusion for Target Tracking Based on Distributed High Degrees Information Filters" Aerospace 5, no. 1: 28. https://doi.org/10.3390/aerospace5010028
APA StyleBenzerrouk, H., Nebylov, A., & Li, M. (2018). Multi-UAV Doppler Information Fusion for Target Tracking Based on Distributed High Degrees Information Filters. Aerospace, 5(1), 28. https://doi.org/10.3390/aerospace5010028