
Chirp Signals and Noisy Waveforms for Solid-State Surveillance Radars


Abstract
:1. Introduction
- the longer time duration allows to lower the transmitted peak power (with respect to an equivalent pulse compression radar) by about a figure of approximately 30 times, keeping unchanged the overall system requirements (e.g., maximum range, range resolution, bandwidth allocation) for the same application;
- the lower transmitted power calls for less solid-state modules to be combined, easing the radar transmitter architecture;
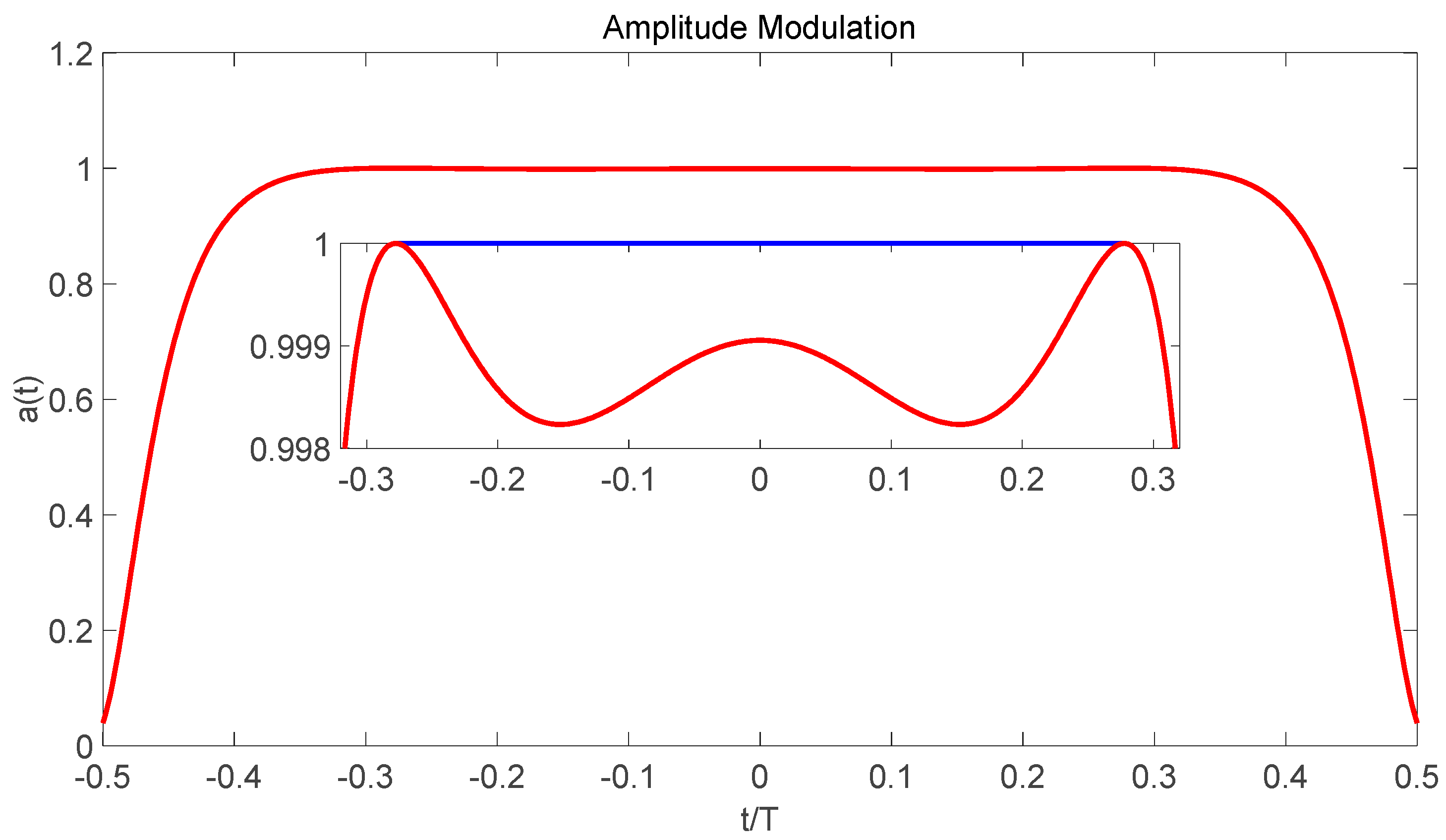
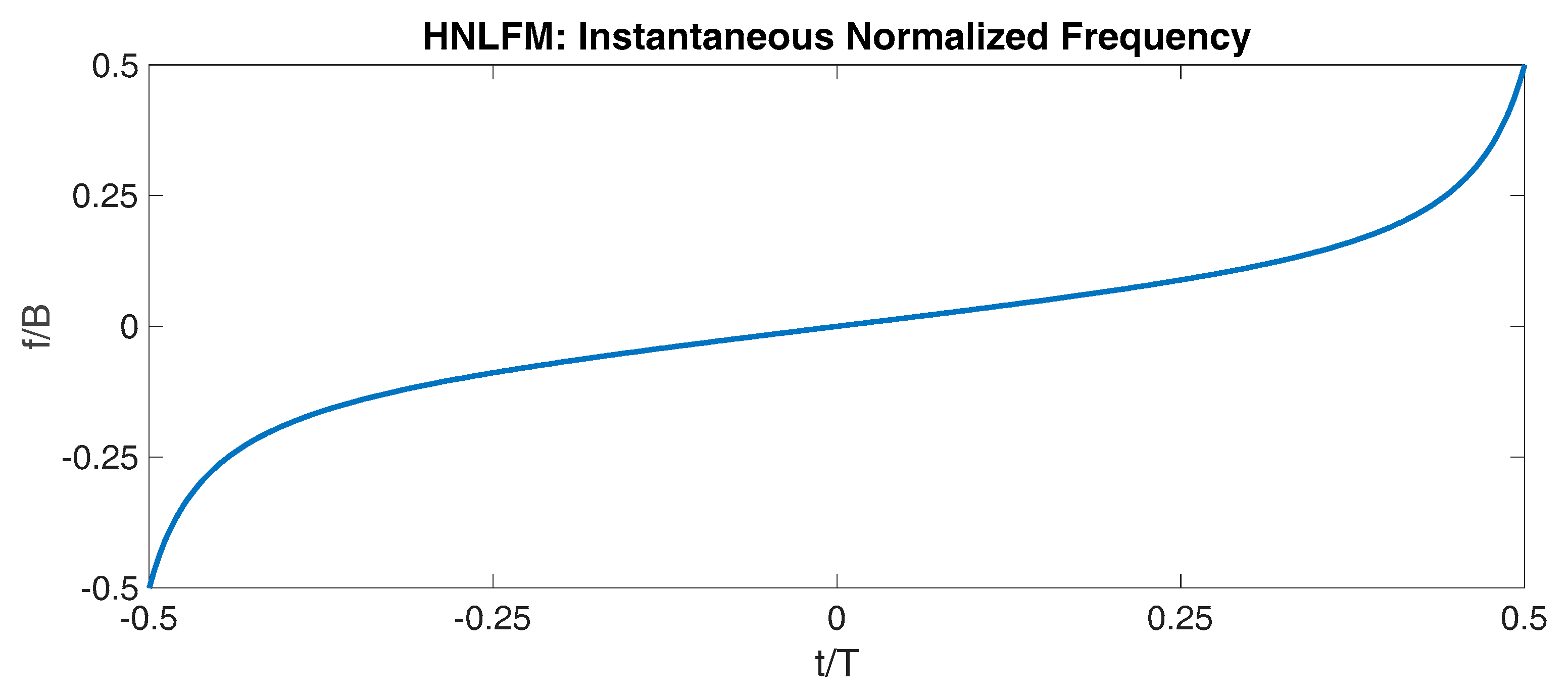
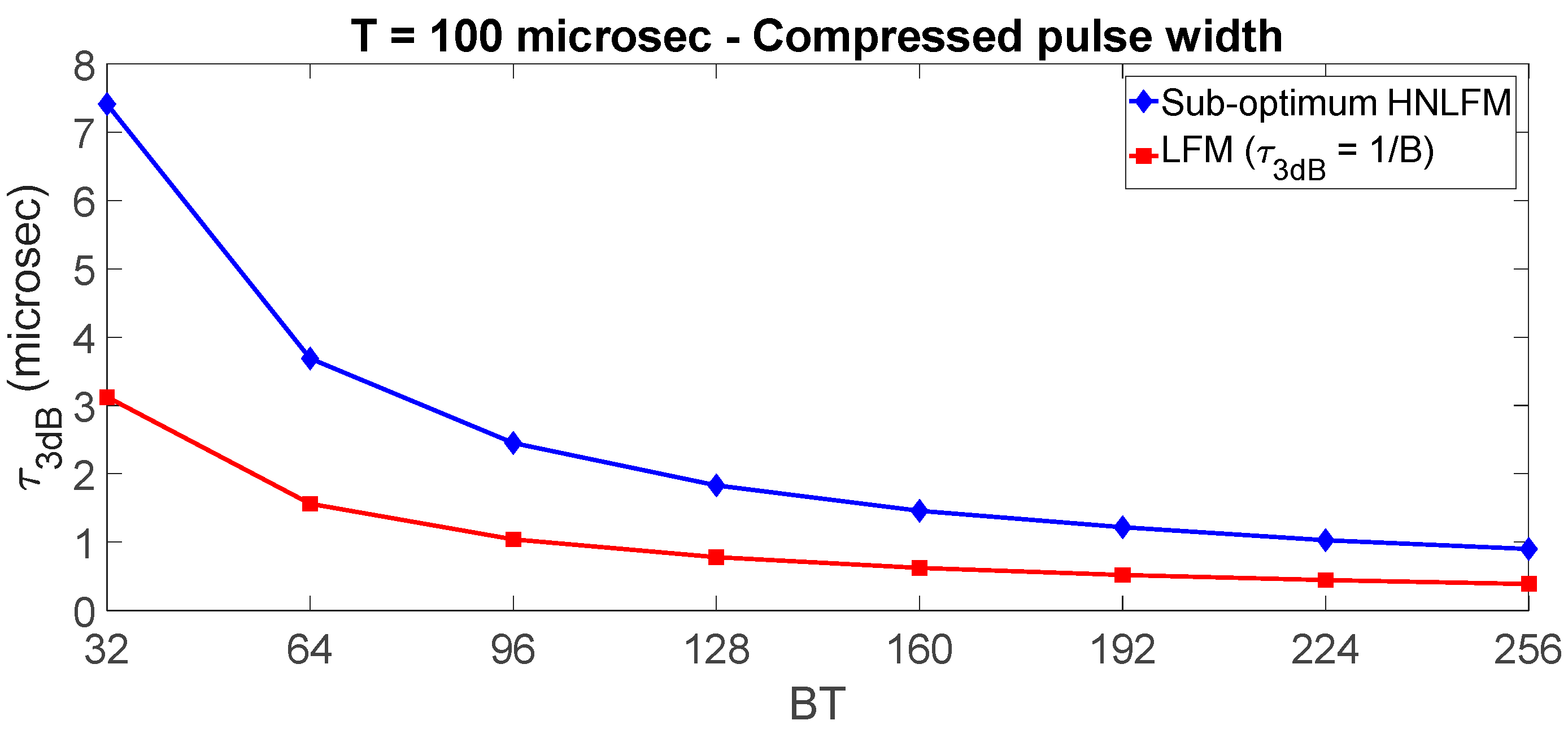
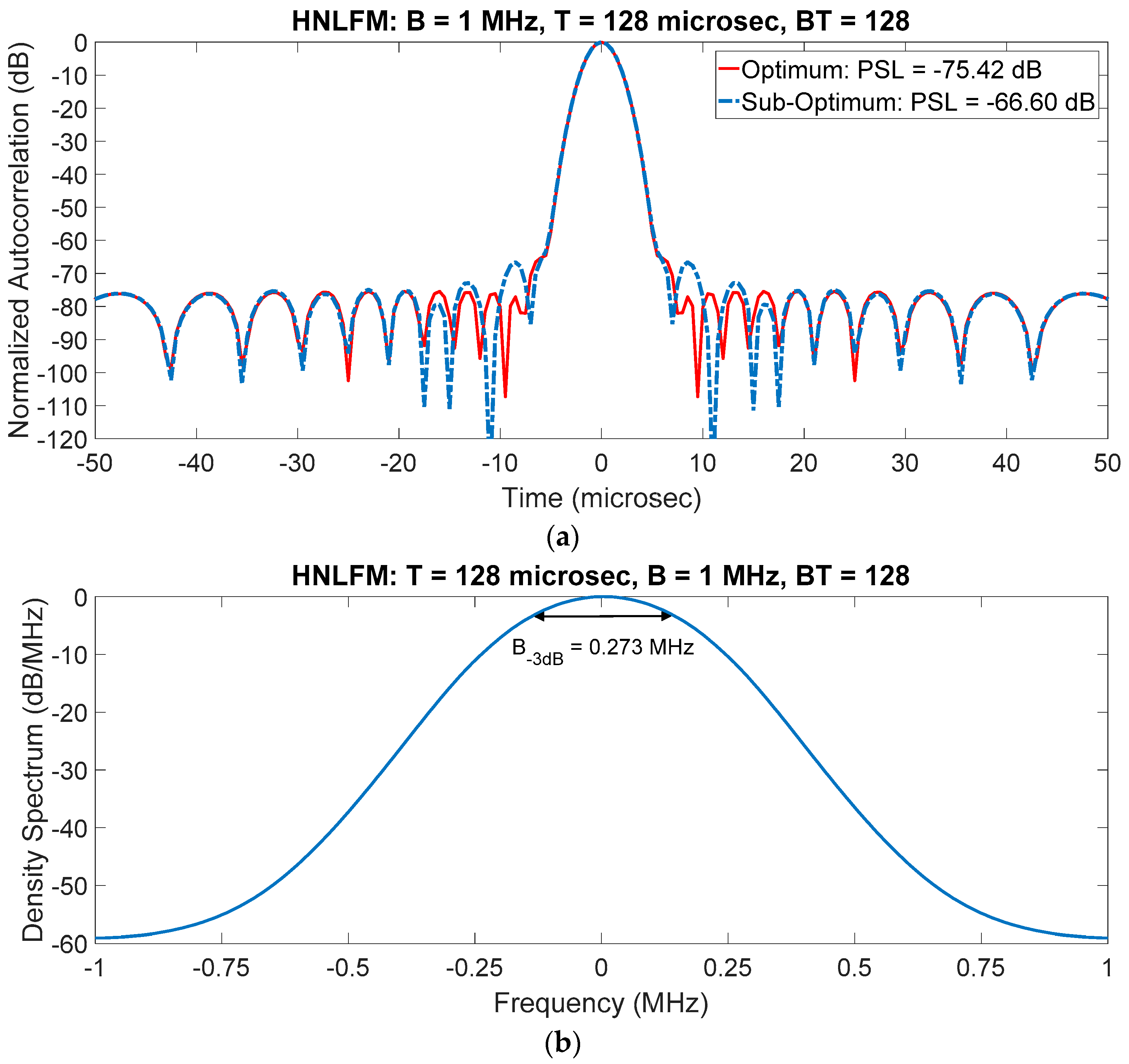
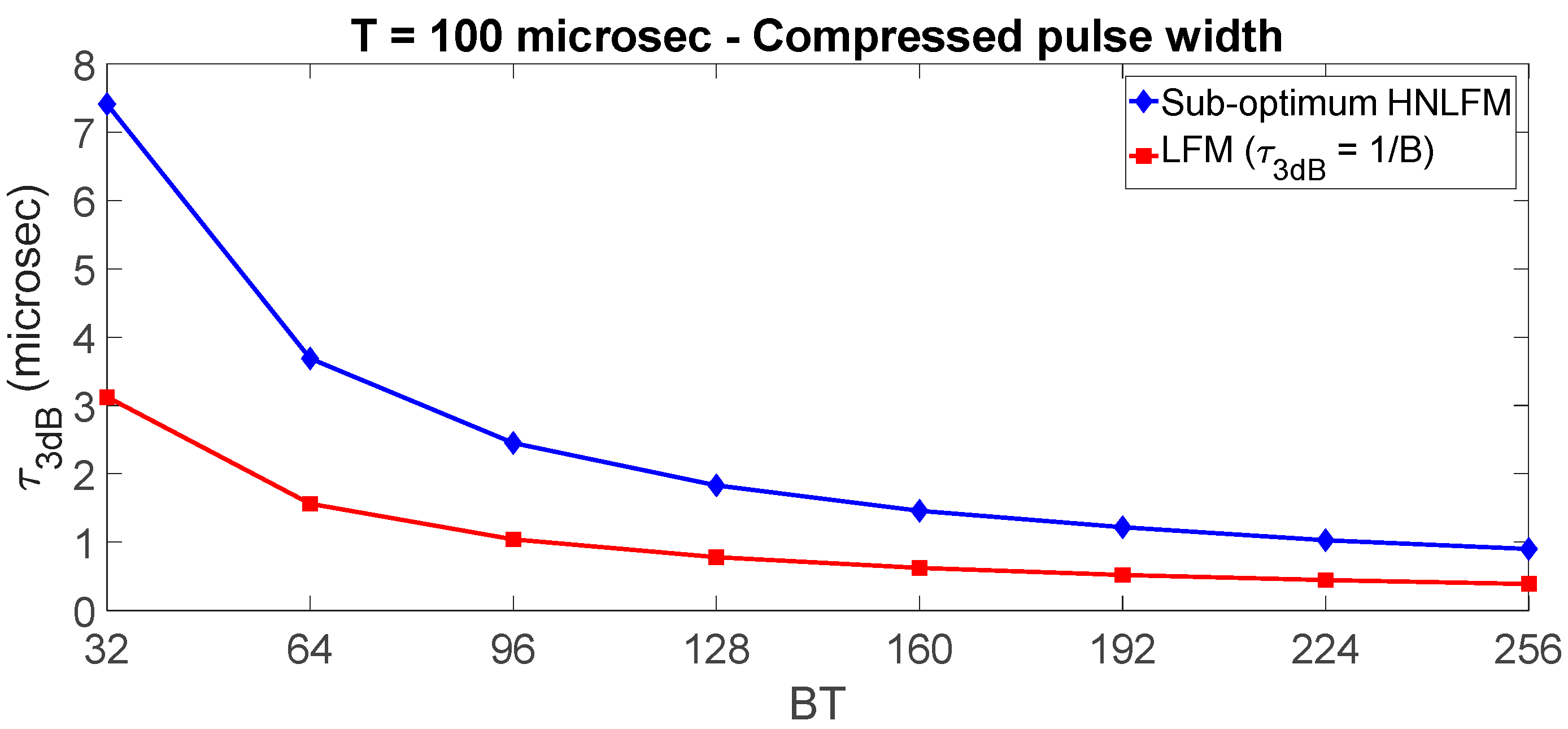
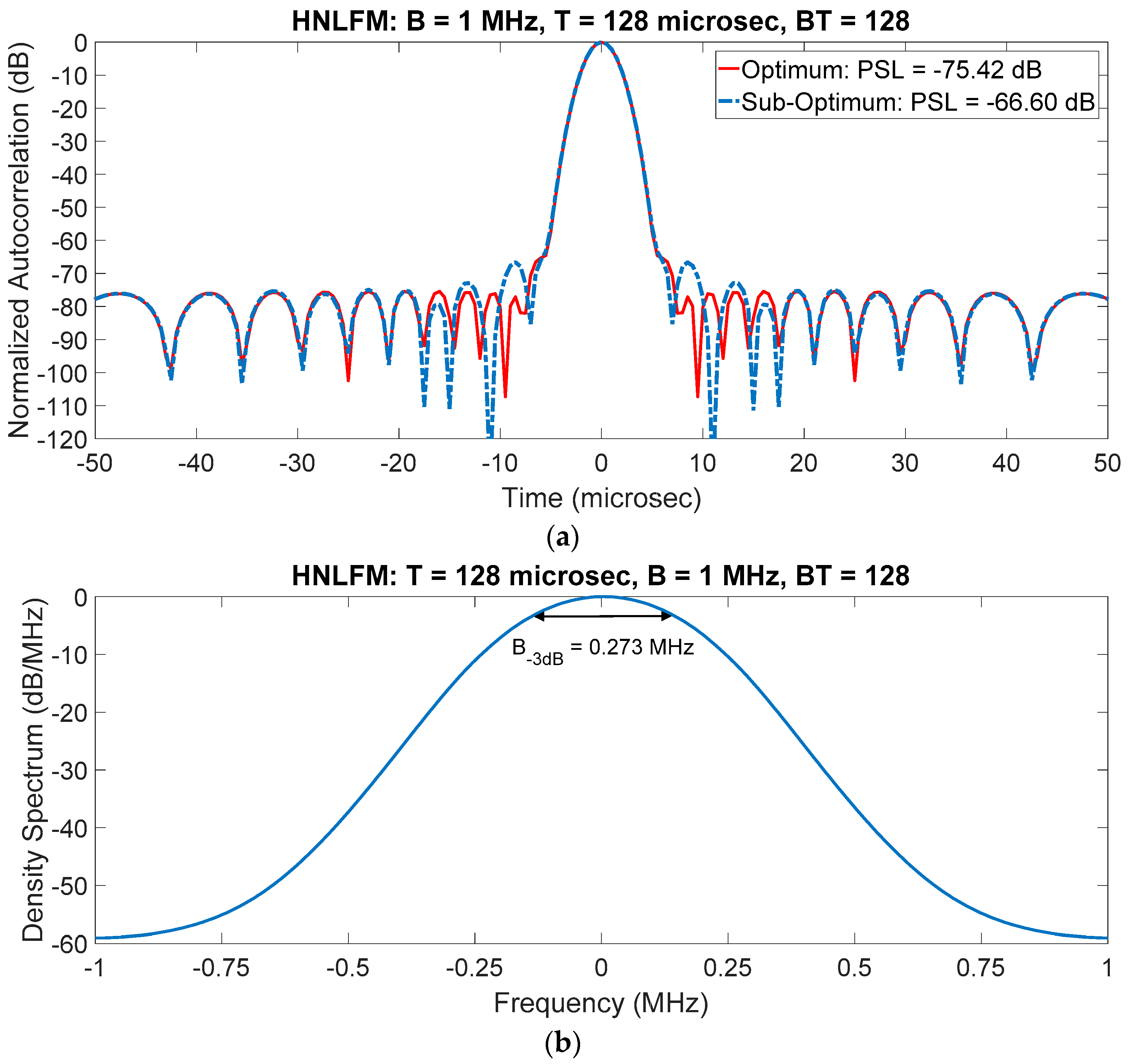
2. Deterministic Waveforms Design
3. Noise Radar Technology
3.1. Power Budget
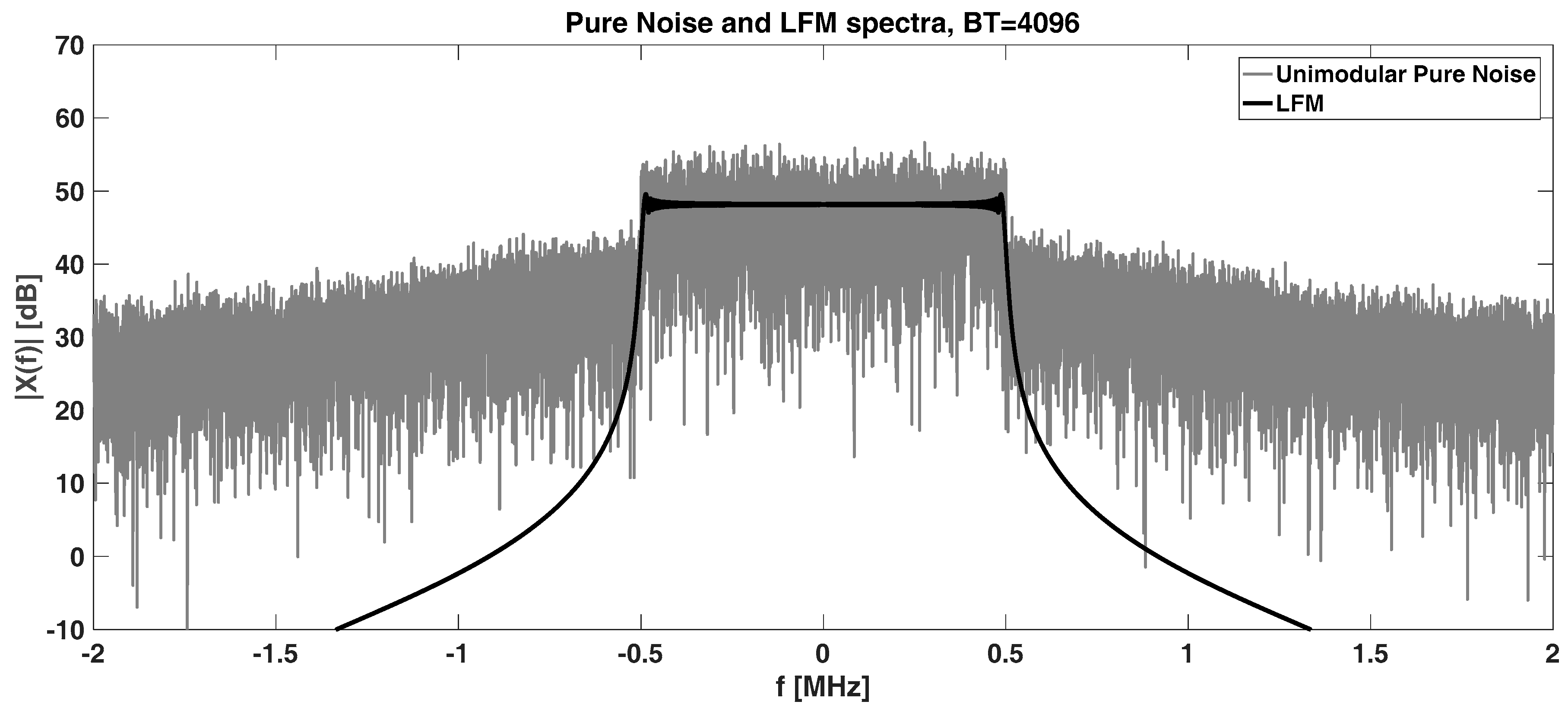
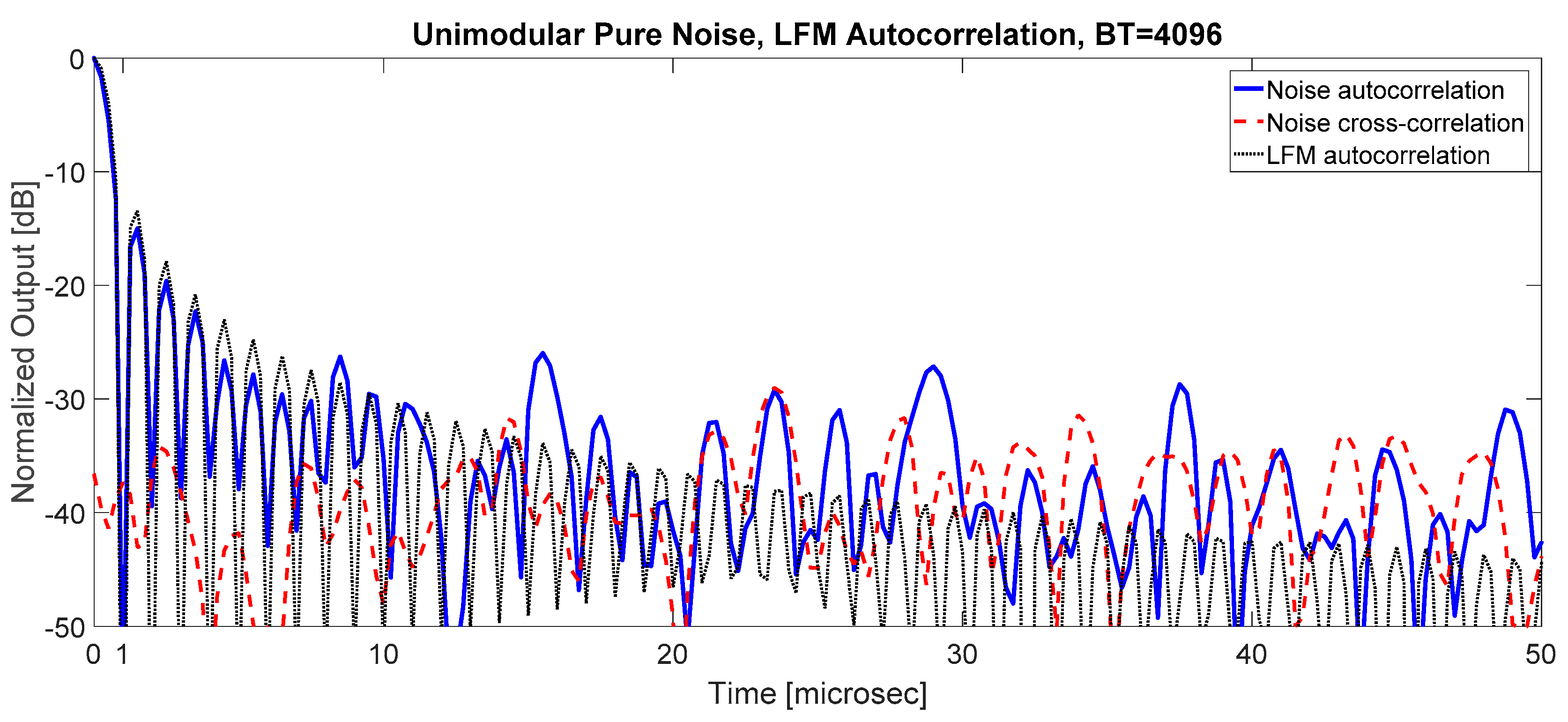
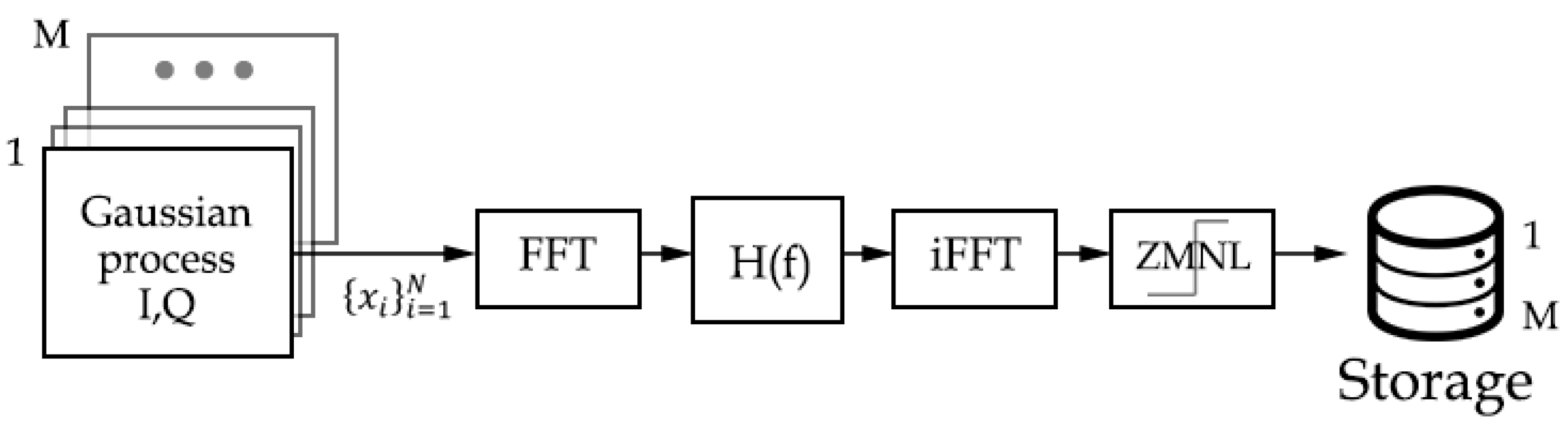
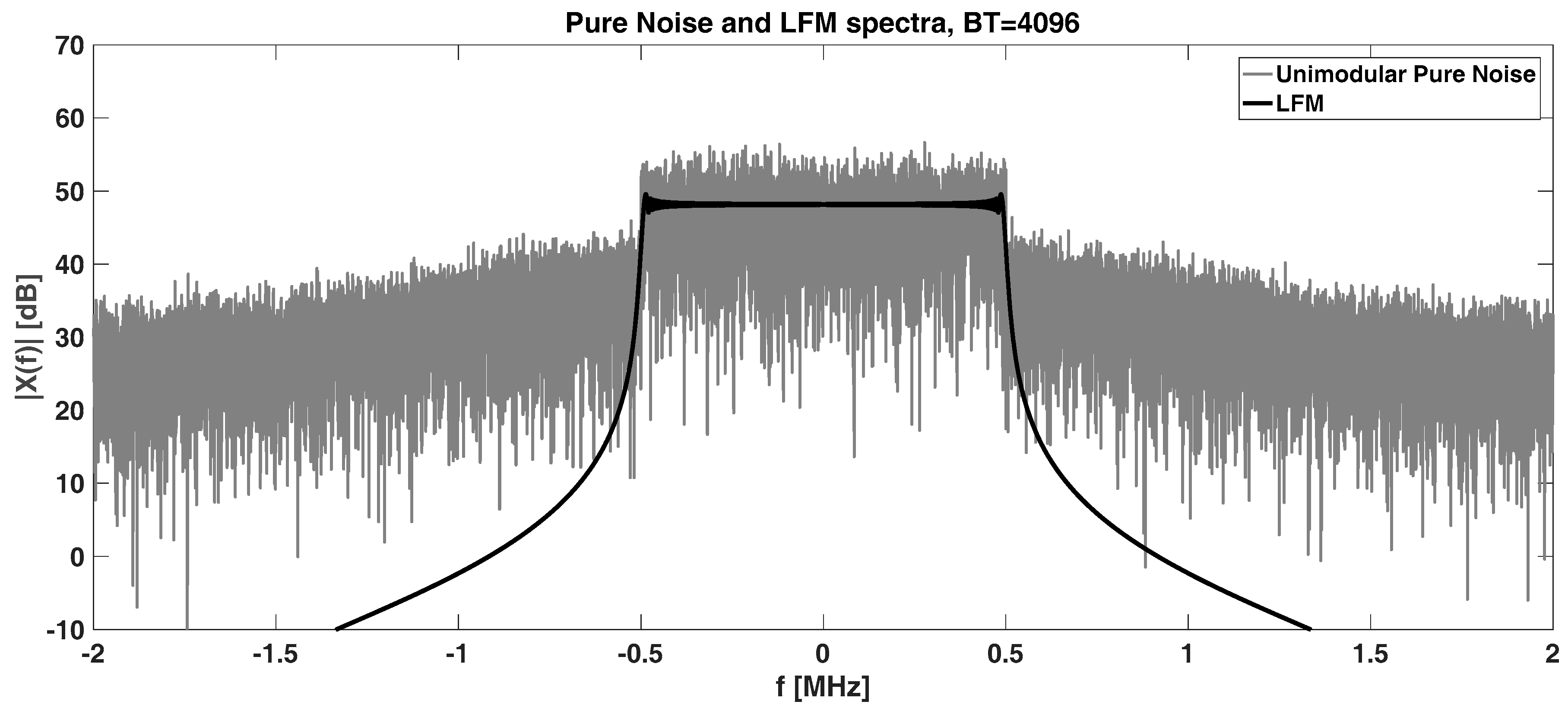
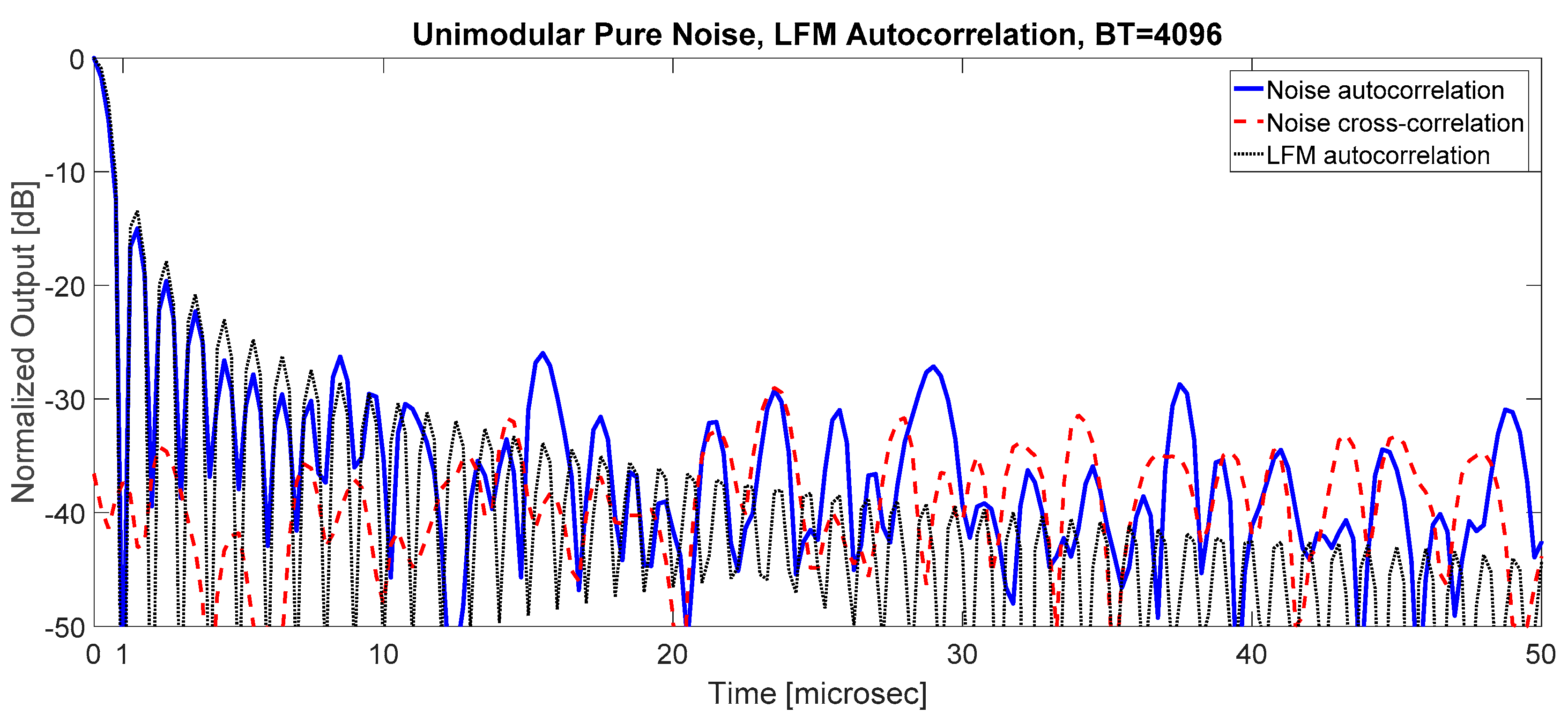
3.2. Unimodular Pure Noise
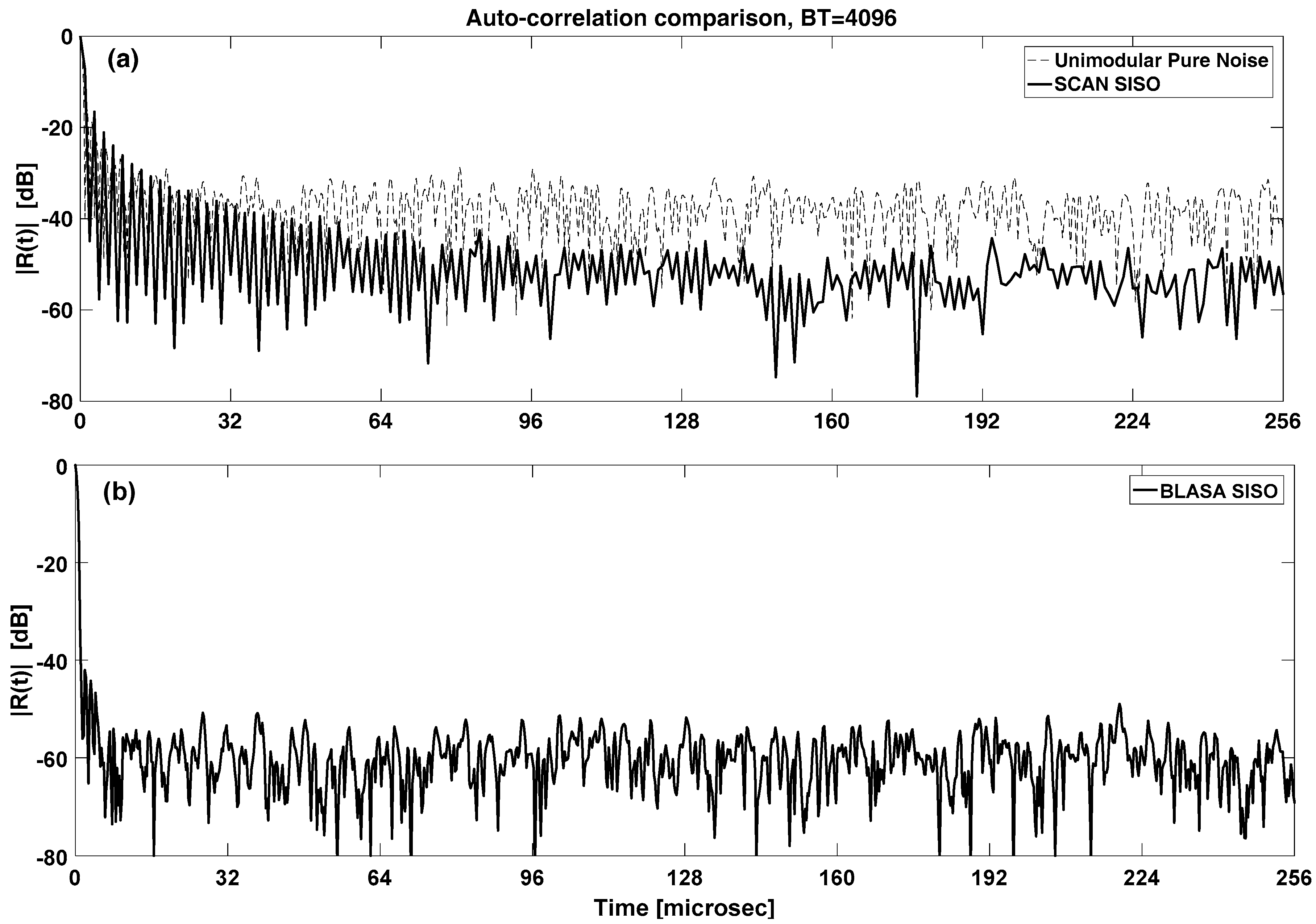
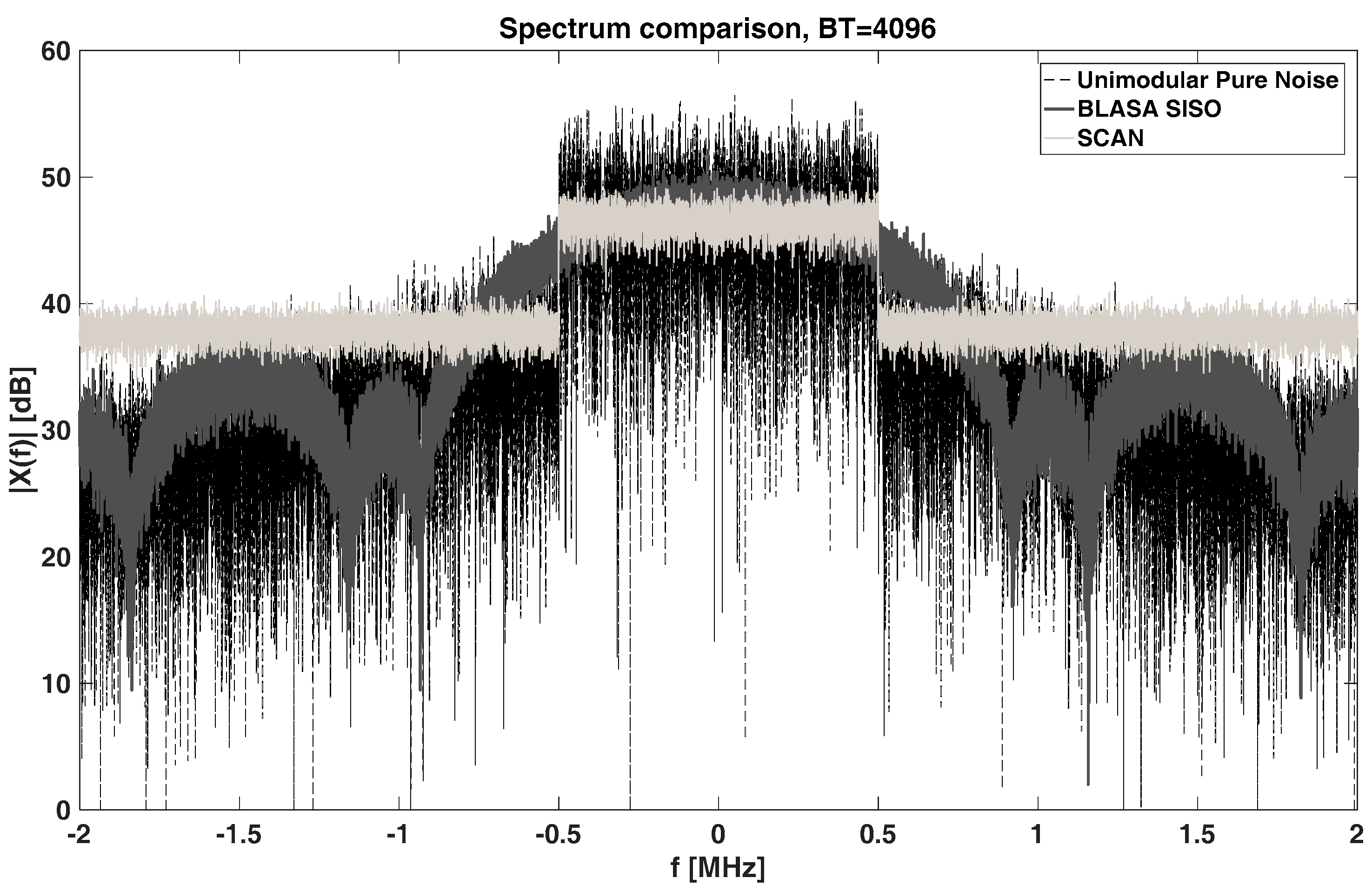
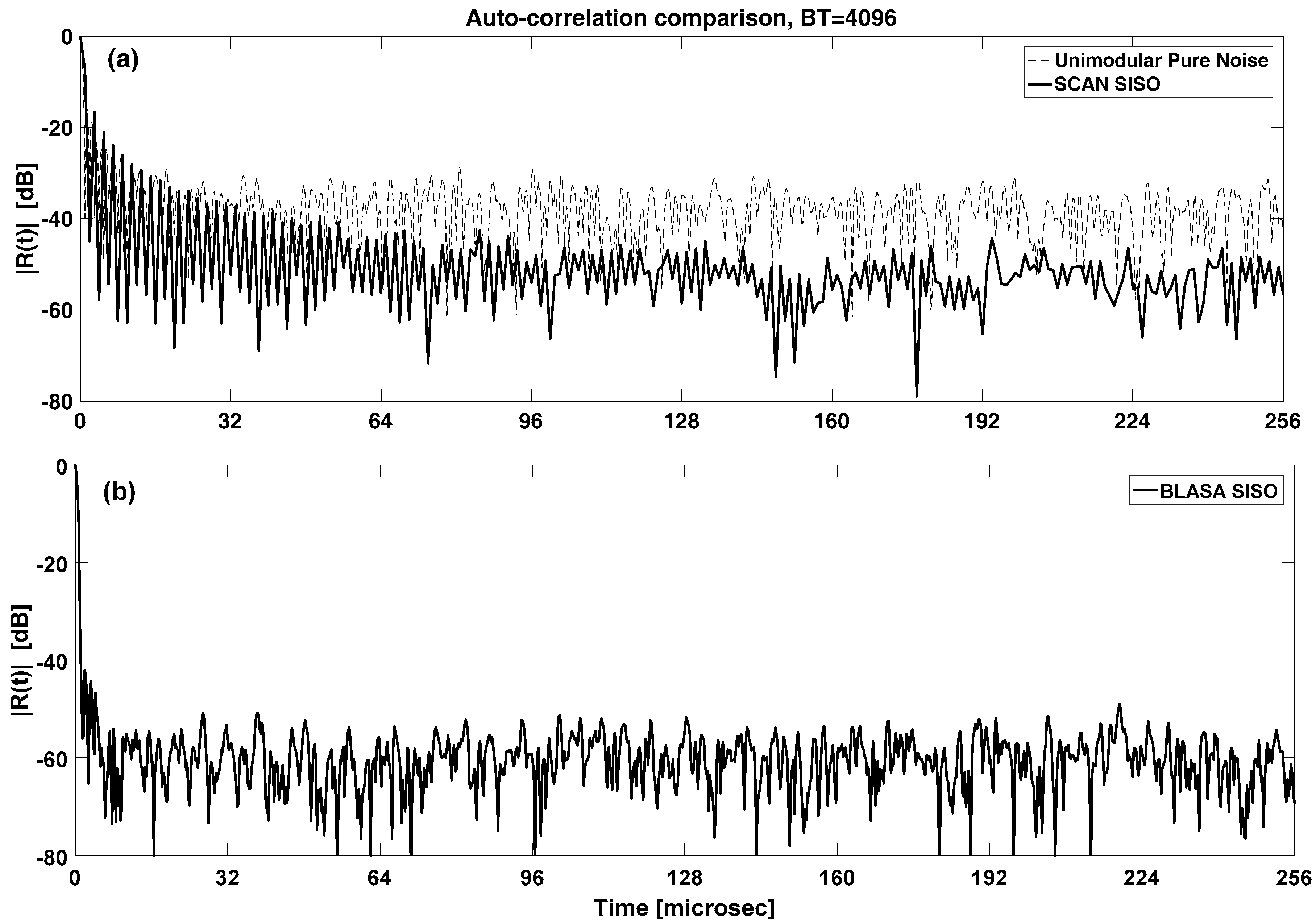
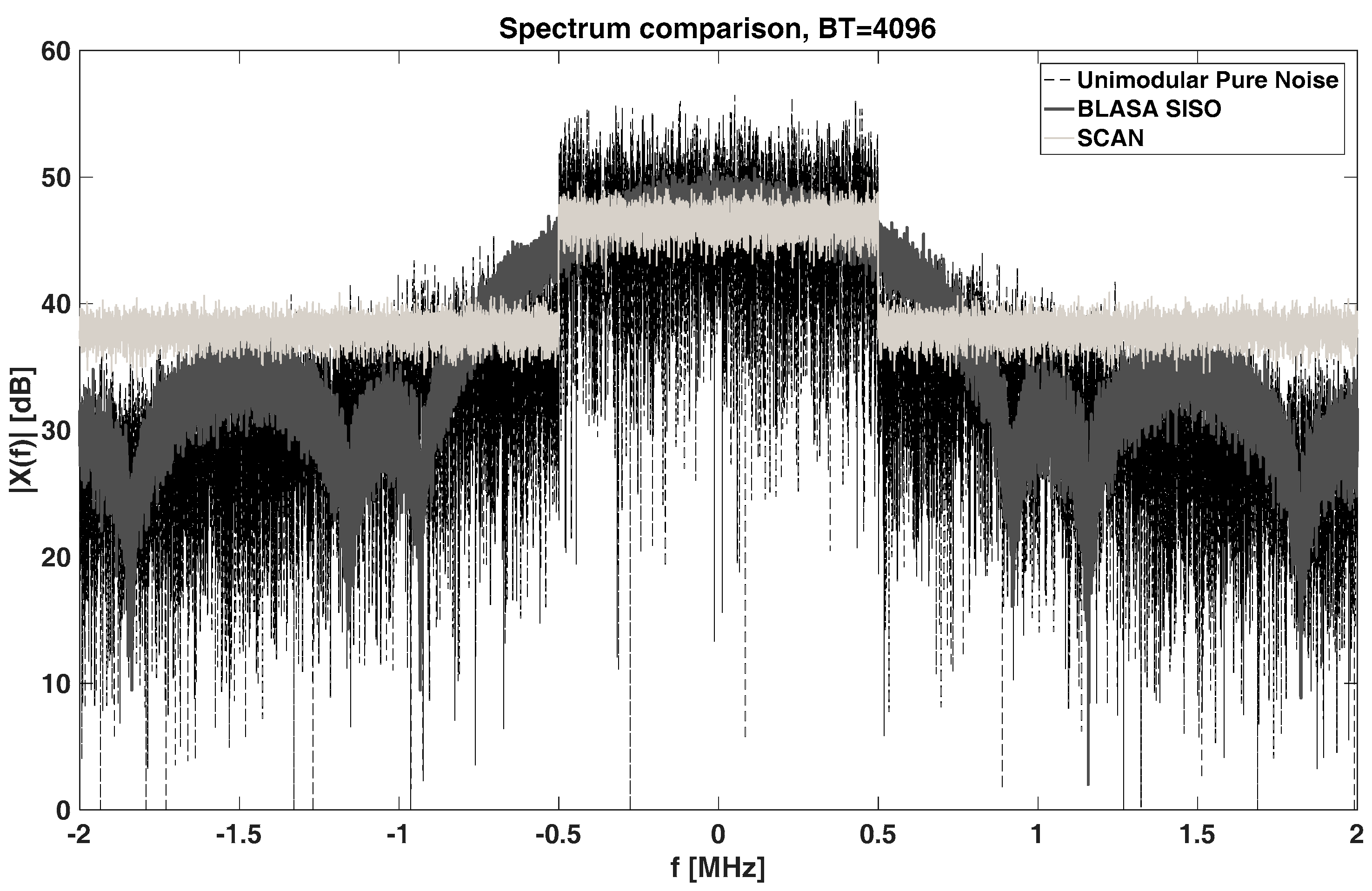
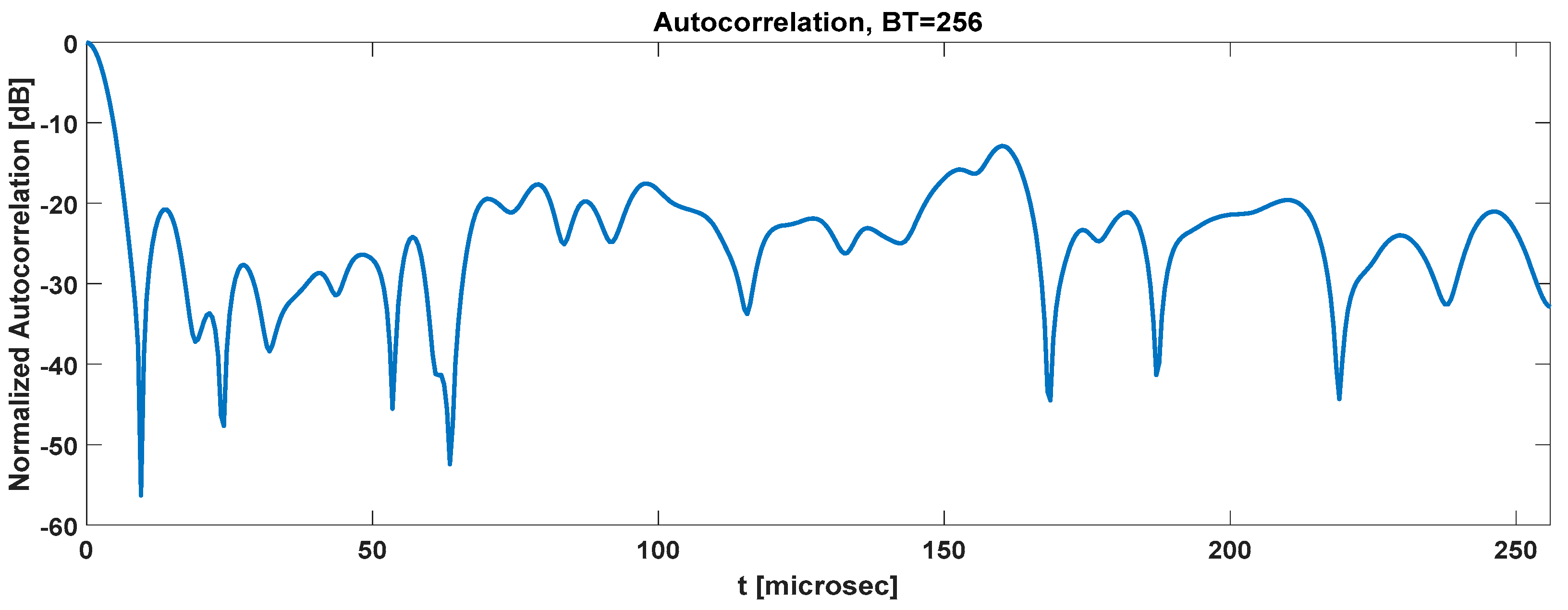
3.3. Range Sidelobe Suppression Algorithms
4. Conclusions
Author Contributions
Conflicts of Interest
References
- Pace, P.E. Detecting and Classifying Low Probability of Intercept Radar; Artech House: Norwood, MA, USA, 2004. [Google Scholar]
- Govoni, M.A. Low Probability of Interception of an Advanced Noise Radar Waveform with Linear-FM. IEEE Trans. AES 2013, 1351–1356. [Google Scholar] [CrossRef]
- Galati, G.; Pavan, G.; De Palo, F. Noise Radar Technology: Pseudorandom Waveforms and their Information Rate. In Proceedings of the International Radar Symposium, Gdansk, Poland, 16–18 June 2014; pp. 123–128.
- Harman, S. The Performance of a Novel Three-Pulse Radar Waveform for Marine Radar System. In Proceedings of the 5th European Radar Conference, Amsterdam, The Netherlands, 30–31 October 2008; pp. 160–163.
- Blunt, S.D.; Gerlach, K. Adaptive Pulse Compression via MMSE estimation. IEEE Trans. AES 2006, 42, 572–584. [Google Scholar] [CrossRef]
- De Witte, E.; Griffiths, H.D. Improved ultra-low range sidelobe pulse compression waveform design. Electron. Lett. 2004, 40, 1448–1450. [Google Scholar] [CrossRef]
- Sarkar, T.K. An Ultra-low Sidelobe Pulse Compression Technique for High Performance Radar Systems. In Proceedings of the IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 1997; pp. 111–114.
- Lohmeier, S.P. Adaptive FIR filtering of Range Sidelobes for Air and Spaceborne Rain Mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 3, pp. 1801–1803.
- Ackroid, M.H.; Ghani, F. Optimum mismatched filters for sidelobe suppression. IEEE Trans. AES 1973, 9, 214–218. [Google Scholar] [CrossRef]
- Cook, C.E.; Bernfeld, M. Radar Signals—An Introduction to Theory and Application; Artech House: Norwood, MA, USA, 1993. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing; Section 4.6; McGraw Hill: New York, NY, USA, 2005. [Google Scholar]
- Levanon, N.; Mozeson, E. Radar Signals; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Millett, R.E. A Matched-Filter Pulse-Compression System Using a Nonlinear FM Waveform. IEEE Trans. AES 1970, AES-6, 73–77. [Google Scholar]
- Doerry, A.W. Generating Nonlinear FM Chirp Waveforms for Radar; Sandia Report SAND2006-5856; Sandia National Laboratories: Albuquerque, NM, USA; Livermore, CA, USA, 2006. [Google Scholar]
- Doerry, A.W. SAR Processing with Non-Linear FM Chirp Waveforms; Sandia Report SAND2006-7729; Sandia National Laboratories: Albuquerque, NM, USA; Livermore, CA, USA, 2006. [Google Scholar]
- Klauder, J.R.; Price, A.C.; Darlington, S.; Albefsheim, W.J. The theory and design of chirp radars. Bell Syst. Tech. 1960, 39, 745–808. [Google Scholar] [CrossRef]
- Yanovsky, F. Radar development in Ukraine. In Proceedings of the International Radar Symposium, Gdansk, Poland, 16–18 June 2014.
- 2009 Pioneer Award. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 2139–2141.
- Galati, G.; van Genderen, P. Special Section on Some Less-Well Known Contribution to the Development of Radar: From its Early Conception Until Just after the Second World War; URSI Radio Science Bulletin, No 358; URSI: Ghent, Belgium, September 2016; pp. 12–108. [Google Scholar]
- Papoulis, A. Signal Analysis; McGraw Hill: New York, NY, USA, 1977. [Google Scholar]
- Collins, T.; Atkins, P. Nonlinear frequency modulation chirps for active sonar. Proc. IEE Radar Sonar Navig. 1999, 146, 312–316. [Google Scholar] [CrossRef]
- Zhiqiang, G.; Peikang, H.; Weining, L. Matched NLFM Pulse Compression Method with Ultra-low Sidelobes. In Proceedings of the 5th European Radar Conference, Amsterdam, The Netherlands, 30–31 October 2008; pp. 92–95.
- Russell, M.; Marinilli, A.; Sullivan, F. Millimeter wave, solid-state amplifiers in radar and communication systems. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, San Francisco, CA, USA, 17–21 June 1996; pp. 53–56.
- Galati, G.; Pavan, G.; De Palo, F. Generation of Pseudo-Random Sequences for Noise Radar Applications. In Proceedings of the International Radar Symposium, Gdansk, Poland, 16–18 June 2014; pp. 115–118.
- He, H.; Li, J.; Stoica, P. Waveform Design for Active Sensing Systems—A Computational Approach; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Galati, G.; Pavan, G. Mutual interference problems related to the evolution of Marine Radars. In Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 1785–1790.
- Galati, G.; Pavan, G.; De Palo, F. Compatibility problems related with pulse compression, solid-state marine radars. IET Radar Sonar Navig. 2016, 10, 791–797. [Google Scholar] [CrossRef]
- Baroncelli, A.; NAVICO Rbu, Montespertoli, Florence, Italy. Personal communication, 1 February 2017.
- Galati, G.; Pavan, G.; De Franco, A. Orthogonal Waveforms for Multistatic and Multifunction Radar. In Proceedings of the 9th European Radar Conference, Amsterdam, The Netherlands, 31 October–2 November 2012; pp. 310–313.
- Stove, A.; Galati, G.; Pavan, G.; De Palo, F.; Lukin, K.; Kulpa, K.; Kulpa, J.S.; Maślikowski, Ł. The NATO SET-184 noise radar trials 2016. In Proceedings of the 17th International Radar Symposium, Krakow, Poland, 10–12 May 2016; pp. 1–6.
- Galati, G. Coherent Radar. Patent PCT/IC2014/061454, 15 May 2014. [Google Scholar]
- Galati, G.; Pavan, G.; De Palo, F.; Stove, A. Potential applications of noise radar technology and related waveform diversity. In Proceedings of the 17th International Radar Symposium, Krakow, Poland, 10–12 May 2016; pp. 1–5.
- Stove, A.; Galati, G.; De Palo, F.; Wasserzier, C.; Erdogan, Y.A.; Kubilay, S.; Lukin, K. Design of a Noise Radar Demonstrator. In Proceedings of the 17th International Radar Symposium, Krakow, Poland, 10–12 May 2016; pp. 1–6.
- Galati, G.; Pavan, G.; De Palo, F. On the potential of noise radar technology. In Proceedings of the Enhanced Surveillance of Aircraft and Vehicles (ESAV 2014), Rome, Italy, 15–16 September 2014; pp. 66–71.
- De Palo, F.; Galati, G. Orthogonal Waveforms for Multiradar and MIMO Radar Using Noise Radar Technology. In Proceedings of the Signal Processing Symposium, Debe, Poland, 10–12 June 2015; pp. 1–4.
- Marsaglia, G.; Tsang, W.W. The ziggurat method for generating random variables. J. Stat. Softw. 2000. [Google Scholar] [CrossRef]
- Nuttall, H.A. Some windows with very good sidelobe behavior. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 84–91. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | MIMO Version | Sidelobe Level and Suppression Interval | Amplitude Modulation | |
|---|---|---|---|---|
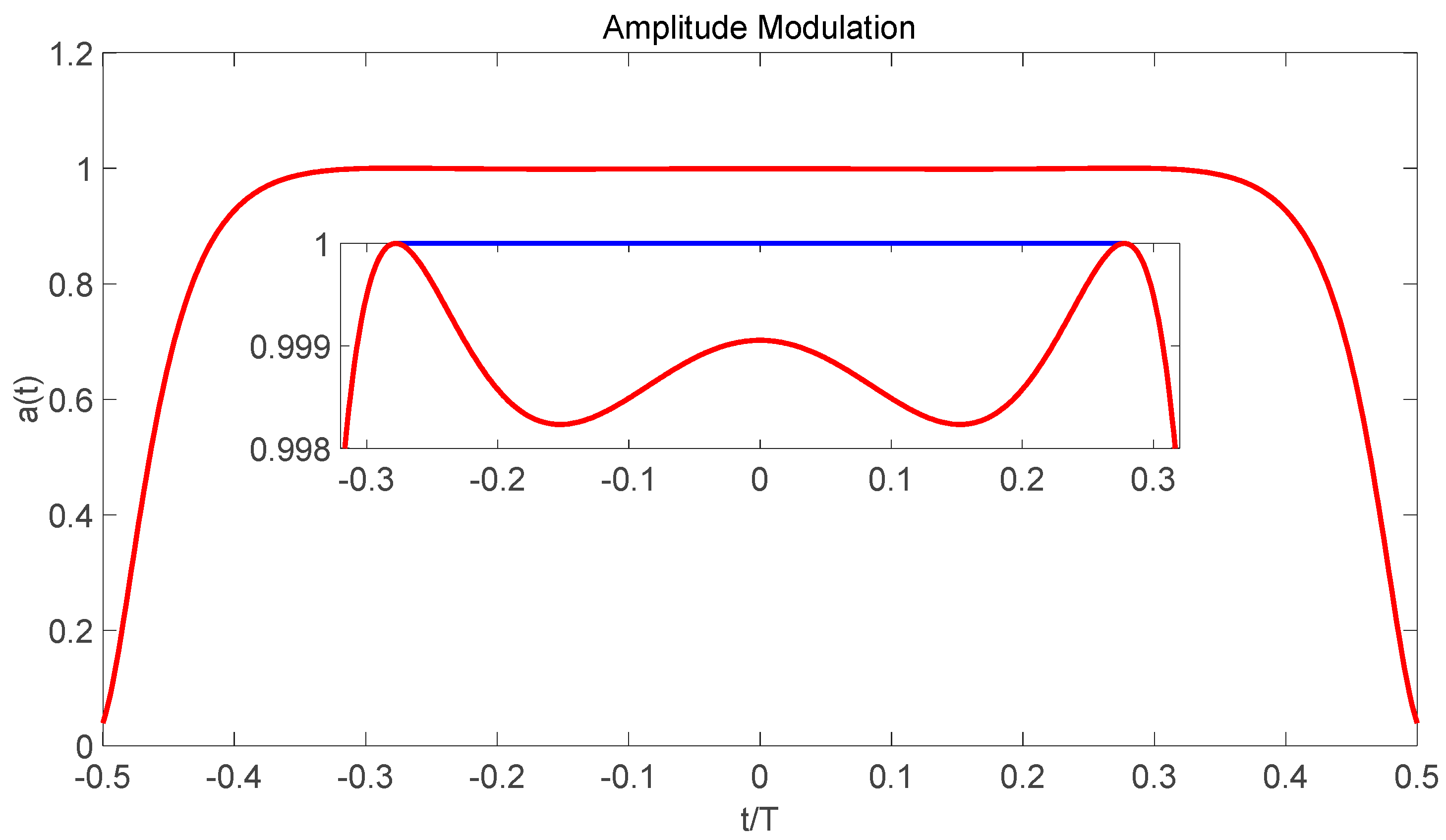
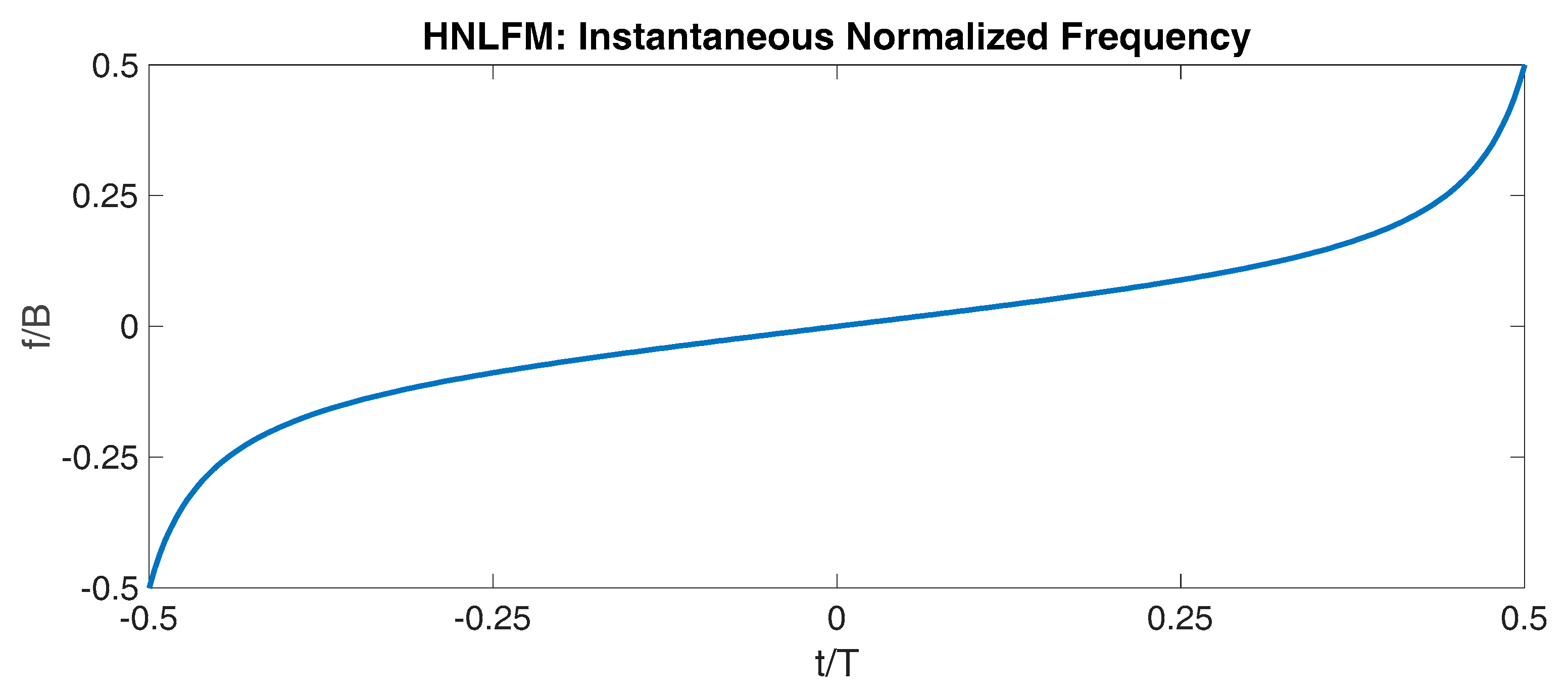
| HNLFM | No | −67 dB at BT = 4096 | 400% | Pseudo trapezoidal AM |
| Pure Unimodular Noise | No | −23 dB at BT = 4096 | 100% | Unimodular |
| SCAN | No | −45 dB at BT = 4096 (within 15%) | 100% | Unimodular |
| BLASA SISO | No | −50 dB at BT = 4096 | 100% | Unimodular |
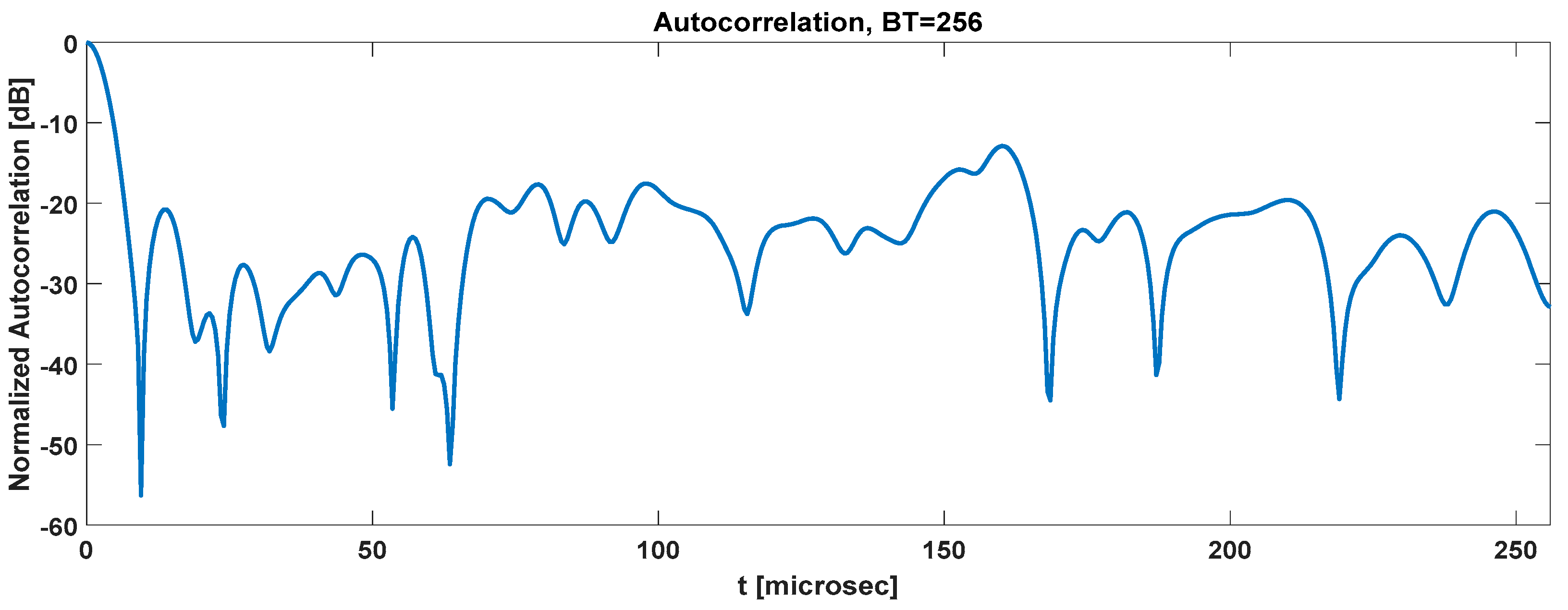
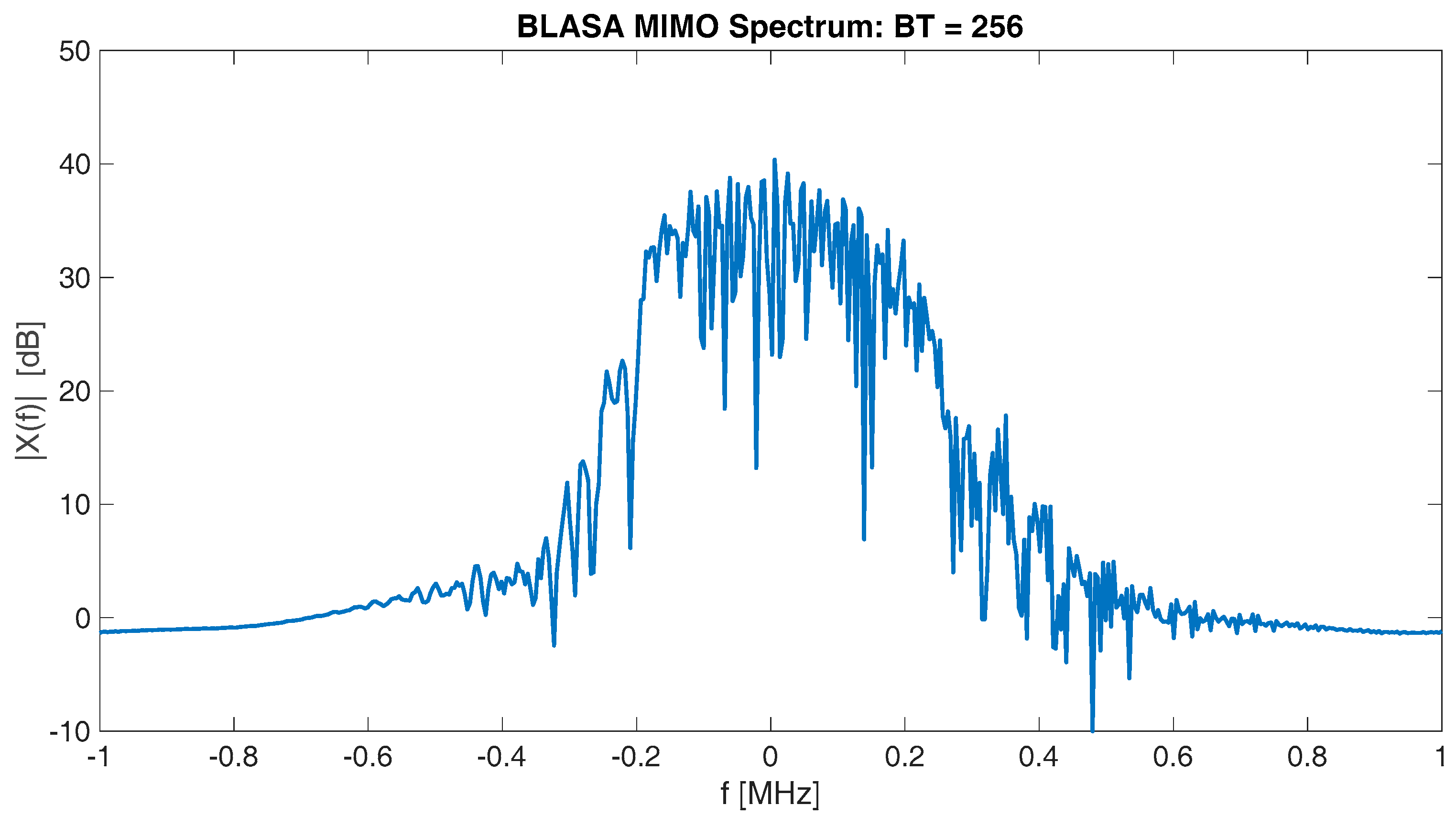
| BLASA MIMO | Yes | −30 dB at BT = 256 (within 12%) if unimodular amplitude with M = 2 | 400% | Unimodular |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galati, G.; Pavan, G.; De Palo, F. Chirp Signals and Noisy Waveforms for Solid-State Surveillance Radars. Aerospace 2017, 4, 15. https://doi.org/10.3390/aerospace4010015
Galati G, Pavan G, De Palo F. Chirp Signals and Noisy Waveforms for Solid-State Surveillance Radars. Aerospace. 2017; 4(1):15. https://doi.org/10.3390/aerospace4010015
Chicago/Turabian StyleGalati, Gaspare, Gabriele Pavan, and Francesco De Palo. 2017. "Chirp Signals and Noisy Waveforms for Solid-State Surveillance Radars" Aerospace 4, no. 1: 15. https://doi.org/10.3390/aerospace4010015
APA StyleGalati, G., Pavan, G., & De Palo, F. (2017). Chirp Signals and Noisy Waveforms for Solid-State Surveillance Radars. Aerospace, 4(1), 15. https://doi.org/10.3390/aerospace4010015