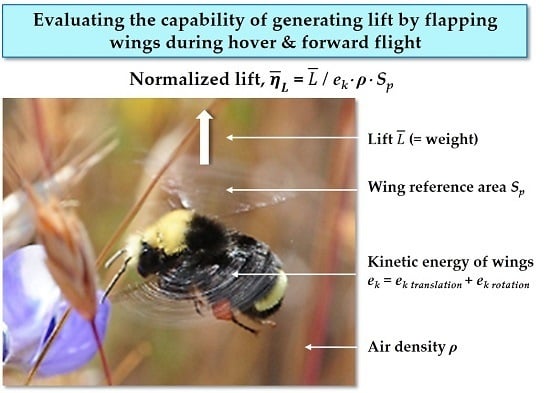
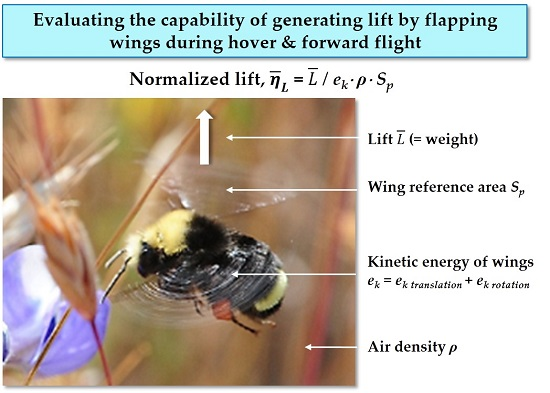
2. The Average Normalized Lift
The normalized lift
evaluates the lifting capability of aircraft with a fixed wing during forward (translating) flight and uses the same variables for normalizing the steady state lift
L in Equation (1), but reformatted in the following way: the specific kinetic energy available at the wing due to translation,
, or
, the density
ρ, and a reference area
Sp (note upper case
S):
Note that the density ρ has been “dissociated” from the dynamic pressure in Equation (1) resulting in the product of the specific kinetic energy, , available at the translating wings, , and the density ρ of the surrounding static flow field. This dissociation shifts the legacy reference coordinate system from being affixed to a static lifting surface, say, an aircraft model in a wind tunnel, from which the incoming airflow’s kinetic energy is being measured, to a new reference coordinate system that is affixed to the static air mass from which the aircraft’s kinetic energy (or ) is measured.
Note that Equation (5) has introduced a new definition of the reference area Sp (written in upper case) that differs from the lower case sp in Equation (1). The original reference area Sp in Equation (1) is found to be its third peculiarity. More on this later.
The term representing the specific kinetic energy (per unit mass) of the flyer,
in Equation (5), can be written in a more general format as the total specific kinetic energy available, say, at a lifting rotor that has a translating velocity
and an angular velocity
ω. As the presence of these two velocities are accompanied by the possession of corresponding kinetic energies, the total specific kinetic energy
can be written as the sum of these two scalar components: the translating kinetic energy
and the rotating kinetic energy
:
The term
I/
m is the specific moment of inertia (again, per unit mass) of the flapping wing and it accounts for the spanwise mass distribution along its length
R. More on this ratio later. To write Equation (5) in a more general format, the kinetic energy term
found in its denominator is replaced by Equation (6). This results in the equation for the normalized lift
that can be applied directly to evaluate the lifting capability of, say, a lift rotor that generates lift
L while translating at a velocity
and rotates at an angular velocity
ω:
The average normalized lift
of flapping wings is obtained by replacing the steady state lift
L and angular velocity
ω in Equation (7) by the average lift
and the average angular velocity
due to flapping:
Throughout this paper, the freestream velocity
and the average angular velocity
are assumed to remain constant over time. Note that for gliding flight,
ω = 0 in Equation (7) and
= 0 in Equation (8), and as a result, the normalized lift
in Equation (7) and the average normalized lift
in Equation (8) equal the steady state lift coefficient
CL in Equation (1). In case of the average lift
for gliding or soaring flight,
= 0, we find that the normalized lift
equals the steady state lift coefficient
CL:
For small values of the average angular velocity
due to flapping, the quasi-steady state assumption for flapping flight can be invoked and the above steady state equation, Equation (9), can be applied. More on the quasi-steady assumption is given in
Section 5.
The quasi-steady assumption tells us that the average normalized lift ≈ lift coefficient CL with one caveat: the definition of the reference area Sp (symbol in upper case) chosen for both and CL is the sum of all planform areas of the aerodynamic surfaces that (i) contribute to the net average lift and (ii) are found (close to) perpendicular to the vector lift (the contribution to lift by the fuselage or body is neglected in this paper). This definition of reference area is considered to be physically proper (upper case Sp) whereas the definition of a reference area that does not consider all surfaces contributing to lift (in a positive or negative sense) is considered a physically improper reference area (lower case sp), as is the case of the legacy reference area sp of an airplane in Equation (1) (which does not account for tail or canard surfaces, both contributing to lift). In the case of a bumblebee, the physically proper reference area Sp is its total wing area.
The average normalized lift
during hover (
= 0 in Equation (8)) is:
Whereas the legacy equations for in Equations (2) and (4) require prior knowledge of the flow field surrounding a flapping wing (which implies the calculation of the velocity field ahead of each element of the wing along its span r and over time t by resorting to the BEM), Equations (8) (for forward flight) and (10) (for hovering flight) do not require such knowledge, and so, do not resort to the BEM as the average angular velocity due to flapping is included in these equations. It is recalled that the sole function of resorting to BEM is to introduce of the flapping wings into the basal Equation (1).
With the exception of the ubiquitous usage of the kinetic energy of a flowing mass of air, the field of aerodynamics does not made extensive use of the concept of energy as do the fields of strength of materials and structure design (i.e., elastic strain energy, Castigliano’s theorem, etc.). Nor has aerodynamics made frequent use of appropriate figures of merit a used in mechanics and thermodynamics. A figure of merit is defined here as a dimensionless number that (i) possesses a physical meaning, that of a ratio of work w and kinetic energy ek; (ii) uses only physically proper parameters for normalizing (dividing) the average lift (or average drag and thrust , forces not covered in this paper), that is, parameters that have a dominant effect in the generation of lift ; (iii) is associated with a maximum value which is usually empirical in nature, and (arguably) close to 1; and (iv) can be read on a stand-alone basis as a “high” or a “low” value.
The average normalized lift is a figure of merit like the efficiency η used in mechanics and thermodynamics, and has the same physical significance: the ratio of work and energy.
The physical meaning of the average normalized lift
is the ratio of the work
w (=
) exerted by the surface
Sp and the kinetic energy
ek available at this reference surface
Sp during the generation of the average net lift
[
5]. This ratio
w/
ek is made apparent by rewriting Equation (8) as:
Note that when the wing loading, , found in the numerator of Equation (11), is divided by the density ρ, it results in the specific work w exerted by the flapping wings.
Equation (11) does not imply that the average lift
generated by flapping is sensitive to the specific moment of inertia
I/
m of the flapping wings, but the average normalized lift
is. The above equation format (i.e.;
w/
ek) allows for a novel physical interpretation of the normalized lift, an interpretation that is shared with all physically proper lift coefficients
CL, as applied, say, to a fixed-winged airplane (
ω = 0 in Equation (11)) as it accelerates gradually during straight and level flight as it generates a constant amount of lift
L (equal to its weight
W) while gradually reducing its angle of attack. In this scenario, the work exerted by the fixed wing,
L/
ρ·
Sp, remains constant (
L =
W = constant) whereas the kinetic energy
available at the wing gradually increases. Its normalized lift
(or lift coefficient
CL) measures the amount of work
w done “per kinetic energy available”
ek that is found to reduce gradually as evidenced by the gradual reduction of the angle of attack. In other words,
L/
ρ·
Sp remains constant in the numerator of Equation (11), whereas its denominator gradually increases, resulting in a decrease of the normalized lift
(or lift coefficient
CL). This physical concept is applicable to the lift coefficient
CL as long as it is calculated by normalizing lift
L by physically proper parameters only. The use of one or more physically improper parameters for calculating
CL will render it also physically improper and unfit for use for comparing different lifting surfaces (say, between flapping wings and rotating cylinders in Magnus effect). At this point, and possibly addressing the possible question raised by the reader on the purpose or validity of comparing such differing lifting systems, it is argued that the usefulness of a figure of merit may be seen to increase if these comparisons, however unlikely, are allowed as meaningful (in the same way the efficiency
η of, say, the Otto cycle and a jet engine’s Brayton cycle can be compared in thermodynamics). The use of physically improper parameter(s) will result in physically improper legacy coefficients
CL and
CDo that do not allow for such meaningful comparisons, as is the case when comparing the lift coefficient
CL of different aircraft configurations (e.g.; flying wing against tail-configured aircraft) or when comparing the parasite drag coefficient
CDo of airplanes of different wing areas (e.g.; F-104
Starfighter against B-58
Hustler). When using these legacy coefficients, meaningful comparisons can still be made by limiting the comparison of
CL to airplanes of same configuration (flying wing against flying wing), or comparing the
CDo of airplanes with same physically improper reference area
sp [
5].
Enter the
third peculiarity of Equation (1): as mentioned above, a valid side-by-side comparison of the normalized lift
of steady state lift systems (i.e., fixed-wing aircraft) as well as the average normalized lift
for time-dependent lift systems (i.e., bumblebees) requires a consistent, physically proper reference area: the reference surface
Sp (upper case
S) in Equation (5) (and onwards) is the total planform area found (close to) perpendicular and contributing to the net average lift
. As discussed above, an expected application of a dimensionless coefficient, be it the lift coefficient
CL, the normalized lift
or its average value
is the comparison of the ability of generating lift
L by various types of lift systems, be these designed by engineers (i.e., tail or canard-configured airplanes, lift rotors, ornithopters) or researched by biomechanicists (i.e., flapping wings of bumblebees). As mentioned, the possibility of a side-by-side comparison of these differing systems has a valuable cross-pollination potential that unfortunately is not currently possible as the definition of a reference area selected for normalizing steady-state lift
L of aircraft (with a reference area represented by a lower case
sp in Equation (1)) is not consistent with the definition of a reference area used for normalizing the time-dependent lift
in biological flight (with a reference area represented by an upper case
Sp in Equation (5) and onwards). The average lift coefficient
of a bumblebee is obtained by normalizing its lift
by
all the aerodynamic surfaces contributing to its generation, an all-inclusive definition made explicit by the use of the upper case symbol,
Sp, as shown in Equation (5). In contrast, and here is the third peculiarity of
CL in Equation (1), the reference area used for a tail or canard-configured airplane considers only the main wing planform
sp. This definition of the legacy
sp, suggested by Munk in 1923 [
6], excludes the tail surface and so, neglects its contribution to the net lift
L (usually a negative one due to stability purposes) as well as the canard surface (and so, neglects its contribution to the net lift
L, always a positive one). This non-inclusive definitions of reference area is a third peculiarity of Equation (1) that results in an physically improper parameter, and is made explicit in this paper by choosing for a lower case symbol,
sp, as shown in Equation (1).
The inconsistency in the definition of reference areas results in, say, the bumblebee having a relatively lower wing loading
, whereas the tail and canard-configured airplanes will have a higher wing loading
L/
sp (as tail and canard areas are not accounted for). This results in an “inflated” wing loading (as
sp <
Sp, so
L/
sp >
) for the tail and canard-configured airplanes when compared to a bumblebee. This larger wing loading, when divided by the density
ρ (as per Equation (11)) results, again, in an “inflated” work
w exerted by the tail and canard-configured airplanes, which in turn results in an inflated
(and
) when compared to a bumblebee. This inflated value can be mistakenly reported as a result of a Reynolds number effect but is, instead, due to an inconsistency in the definition of reference areas. That an increase in the Reynolds number has an effect of an increase in
CL max is not in question: what is highlighted here is a significant contribution towards an increase in the lift coefficient
CL (and
CL max) that is a result of a more mundane problem: the neglect of the tail and canard areas. If comparisons between biological flyers and aircraft are necessary, the reader is encouraged to compare their legacy
CL (and
CL max) values using flying wings instead of tail and canard-configured airplanes. In other words: the comparison of the capability of generating lift by tail and canard-configured airplanes on one side and bumblebees on the other may be flawed due to the use of inconsistent definition of their reference areas that, by neglecting a large percentage of their lifting areas that contribute to net lift (≈ tail and canard are typically 20% of the total lifting planform) invalidates a meaningful comparison between lift coefficients, as results show an overestimate of the lift capability of tail and canard-configured by, typically, 20%. Although not related to flapping flight, the above-described situation also arises when comparing the (inevitably lower)
CL max of a flying wing with the
CL max of a tail or canard-configured aircraft. The normalized lift
is a figure of merit that is not configuration-dependent and allows for the meaningful comparison of a large variety of lifting systems due to its use of a consistent, physically proper definition of reference area
Sp [
5].
Next, we evaluate two physically proper parameters found in Equation (11): the average angular velocity and the specific moment of inertia I/m. From these parameters, other physically proper parameters will be derived, and their inclusions in Equation (11) will make this equation more practical.
The average angular velocity of flapping wings in Equation (11) equals 2·f·Φ where f is the flapping frequency in cycles per second (a cycle is a downstroke followed by an upstroke) and Φ is the stroke angle (a stroke is the wing’s upstroke or downstroke).
The specific moment of inertia I/m in Equation (11) is the specific moment of inertia of a single flapping wing, a term that is not related to aerodynamics but to its spanwise (not chordwise) mass distribution. The specific moment of inertia I/m of a wing is related to the second moment of inertia, but from a “kinetic energy-during-flapping” standpoint that occupies us here, the chordwise placement of the wing’s center of gravity, CG, is neglected. This is so as is the wing pronation/supination involves a negligible amount of kinetic energy as the wing rotates about the wing’s long axis during each flapping cycle. So, the “second moment” scenario is now a “first moment” one, were the two-dimensional wing is substituted by a one-dimensional rod of constant density distribution along its length, a valid substitution as long as the wing’s spanwise CG location coincides with the rod’s CG (as the rod of length R has a constant density along its length R, its center of gravity is placed at R/2). From an inertial standpoint and from a “per unit basis” (and understanding that aerodynamics does not play a role in I/m) the flapping wing will have the same inertial property (i.e., I/m) as the rod, as long as both (i) share the same kinetic characteristics (wing pronation and supination during flapping are not considered) and (ii) the CG of the wing and rod are placed at the same spanwise distance dCG from the axis of rotation. Whereas the length R of the wing and the rod may be different, the distance of their CG to the axis of rotation dCG must be the same for this substitution to be valid (i.e., same dCG). So, if the CG of the wing is not known, the term I/m is obtained by replacing the wing by a cylindrical rod of the same length R as the wing’s span. It is not necessary to know the mass m of the wing as Equation (11) contains specific kinetic energy terms ek, that is, energies per unit mass.
There are two cases to contemplate: as mentioned above, if the CG of the wing is not known, it can be assumed to be at half the wing’s length,
R/2, and so, its specific moment of inertia
I/
m can be substituted by the moment of inertia per unit mass of a rod as it rotates about its end and equal to ⅓·
R2, a value found in [
7] (p. 251, Figure 9f). The 1/3 value is what Weis-Fogh calls the shape factor for the second moment of the area,
σ [
3] (p. 173, Table 1, first row). The second case is when the center of gravity of the wing can be calculated and is not found to be at (or close to)
R/2 on the wing but at a distance, say,
dCG, from the axis of rotation. In this case, the rod substituting the wing will be of length 2·
dCG, and its specific moment of inertia
I/
m of the wing becomes ⅓·(2·
dCG)
2.
If the assumption of the placement of the center of gravity of the wing at
R/2 is acceptable, then
I/
m in Equation (11) can be replaced with ⅓·
R2, and
is replaced by 2·
f·
Φ, and the fraction ½ is made a common factor and placed outside of the parentheses. With these changes made in the denominator of Equation (11), we define the
total wing velocity Vw of a flapping wing as:
The product
equals the peak-to-peak amplitude
A travelled by the wing tip along a upstroke (or a downstroke) and if multiplied by the frequency 2·
f, it results in the average tangential velocity
vtt of the wing tip (subscript
tt stands for tip, tangential) during a stroke. Replacing in Equation (12), the total velocity
Vw is:
For a non-zero translating flight velocity,
≠ 0 in Equation (13), the translation velocity
v∞ is made a common factor and, when taken out of the parentheses, the above expression is written as a function of the velocity ratio
that equals the Strouhal number,
St [
8]:
This definition of the total wing velocity
Vw is based on kinetic energy considerations and varies from Lentink and Dickinson’s definition of the characteristic speed
U, which derives from the kinematics of the flapping wing [
9] (p. 2695).
In the same vane, the
total dynamic pressure Q is defined as a function of total velocity
Vw and the Strouhal number
St:
The total dynamic pressure Q results from the addition of the dynamic pressure due to the wing translation, , and the dynamic pressure due to flapping, and should not be confused with the total pressure p0, the sum of static and dynamic pressure. Note that for the translating flight of fixed wings (i.e., gliding flight), the flapping frequency f is 0, and so, the Strouhal number St is zero, and the total velocity Vw is then reduced to the freestream velocity at infinity, Vw = , in Equation (14). Furthermore, the total dynamic pressure Q is reduced to the dynamic pressure in Equation (15).
The average normalized lift
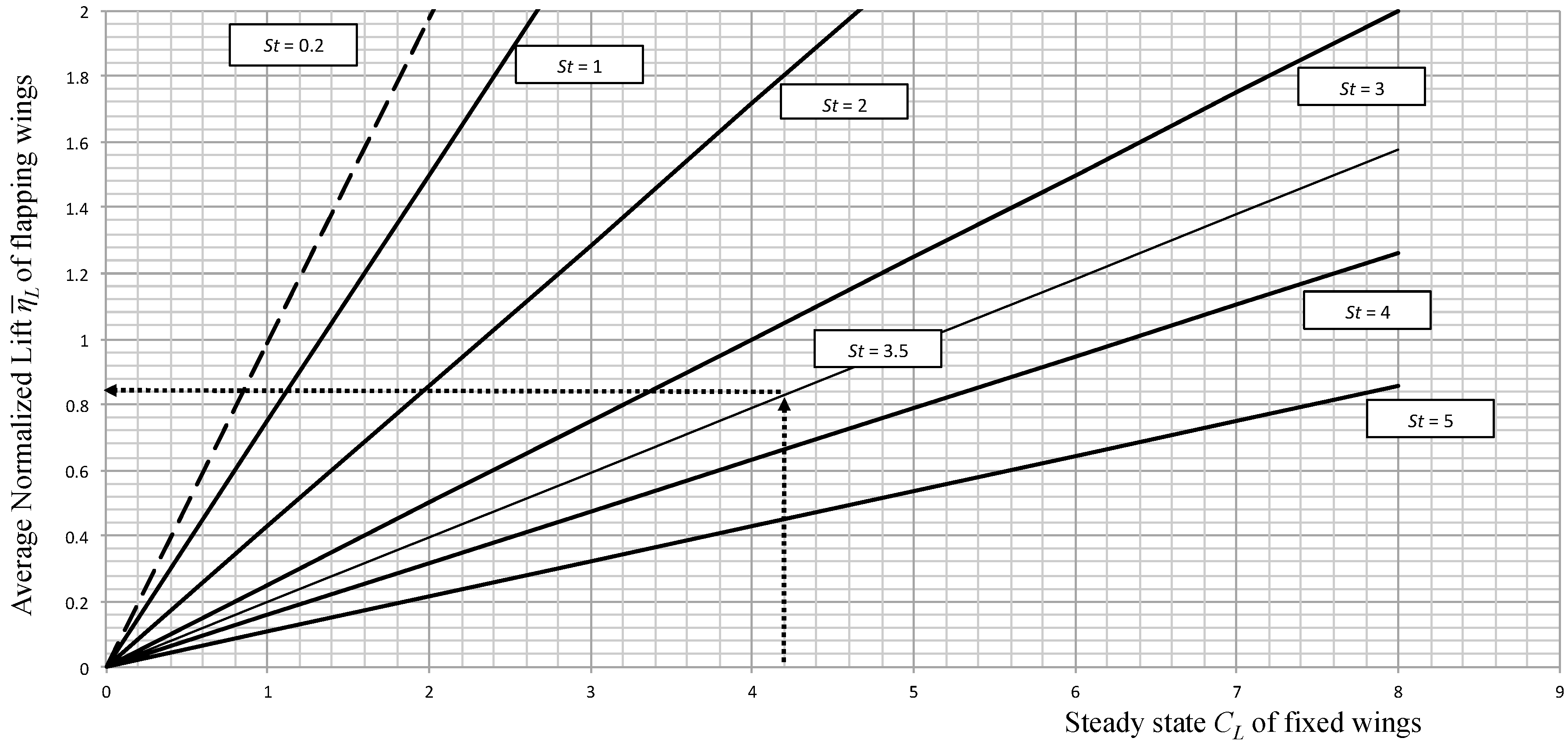
of flapping wings is next written as a function of Strouhal number:
The relationship between the steady state lift coefficient
CL and the time-dependent average normalized lift
is evaluated by the ratio
, or the ratio Equation (1)/Equation (16):
As the flapping frequency
f tends to 0 for a given forward velocity
, the Strouhal number
St tends to 0 and
tends to
CL (
f→0, then
St→0 and
→1). Equation (17) can be used to advantage to calculate the average normalized lift
in two steps: the first step calculates the coefficient
CL for the steady state flight (by assuming extended wings and simply not considering its flapping kinematics) using Equation (1). The second step “corrects”
CL for the time-dependent effects of flapping by dividing the steady state
CL by 1 + ⅓·
St2. The lift coefficient
CL in Equation (17) during flapping flight can be interpreted as the hypothetical steady-state lift coefficient
CL required from the extended, non-flapping wings as they generate an (unrealistic) lift
L equal to the weight of the flyer as it translates at the same forward speed
as the actual flapping flyer. This steady state
CL is unrealistic as the wings will stall at a much lower value. Correcting this steady-state fictitious
CL value by dividing it (1 + ⅓·
St2) results in the average normalized lift
of the flapping wings of the flyer. A quasi-steady analysis of flapping flight can be contemplated when the values of the steady state lift coefficient
CL and the corresponding average normalized lift
are close (i.e.;
CL ≈
). More on this subject in
Section 5.
The total velocity
Vw defined in Equation (14) can be used to advantage to characterize the Reynolds number of flapping wings of characteristic chord
c, surrounded by the air of kinematic viscosity,
υ:
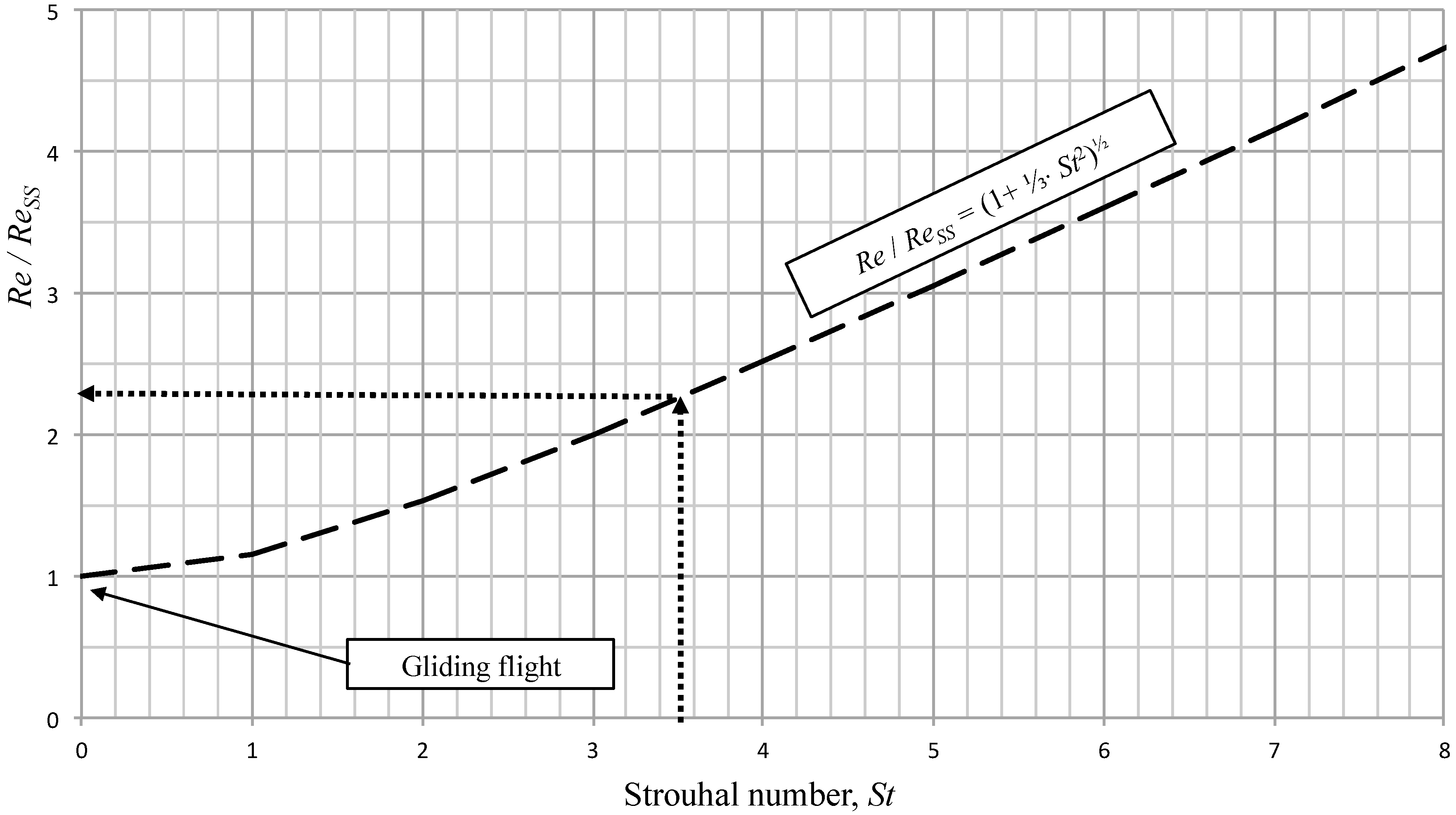
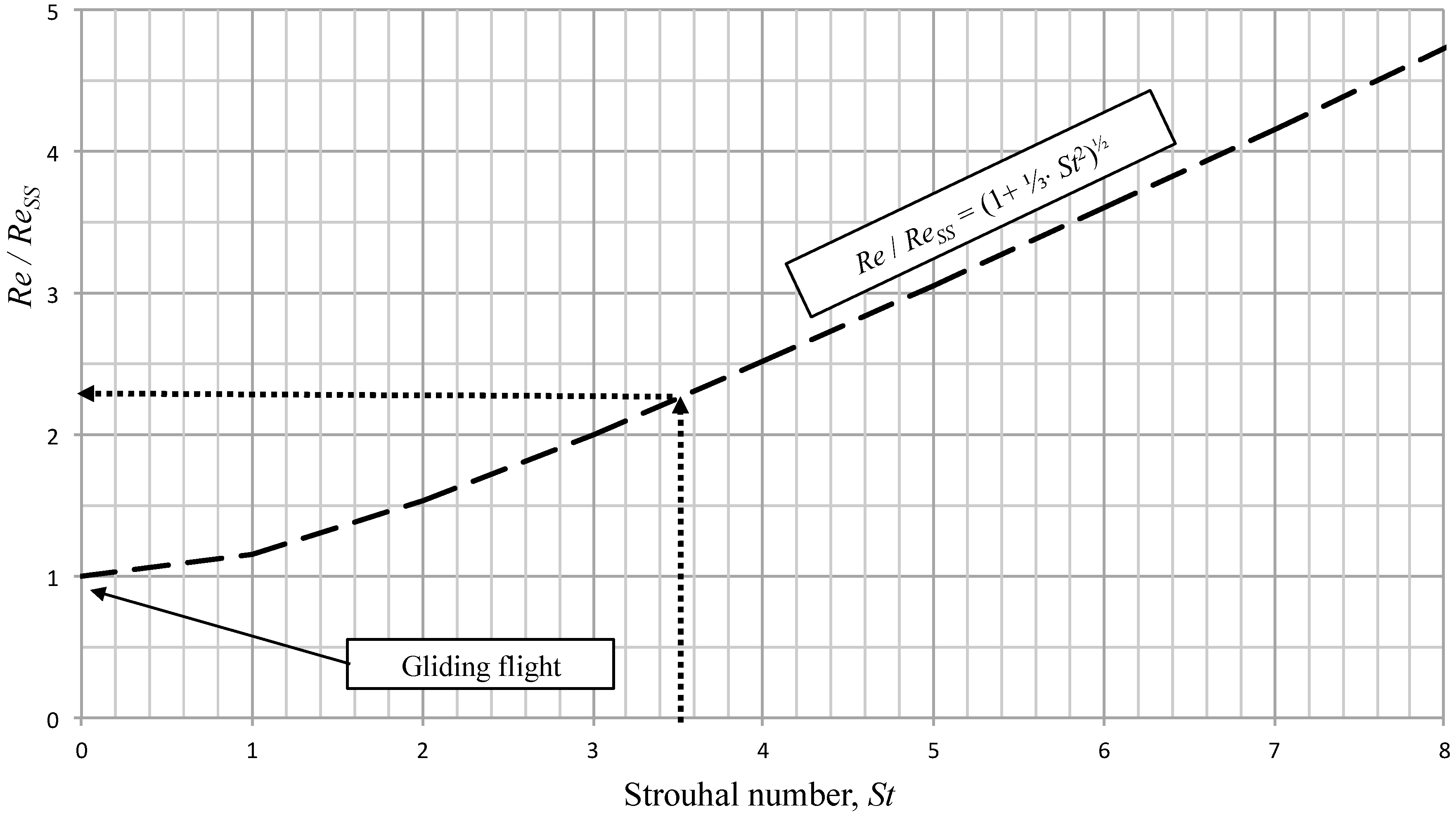
The Reynolds number
Re due to flapping can be calculated in two steps: the first step calculates the steady state Reynolds number
Ress (the subscript
ss stands for steady state) contained in the leftmost parentheses, and the second step corrects
Ress for flapping effects by multiplying it by (1 + ⅓·
St2)
½. A closely-related approach to evaluating the Reynolds number of flapping wings has been suggested by Lentink and Dickinson [
9] (p. 2696).
The average normalized lift
can be written in a familiar format, as a function of the total velocity
Vw or the total dynamic pressure,
Q,
The following
Table 1 shows how the time-dependent variables
Vw,
Q,
and
Re can be calculated by “correcting” the corresponding steady-state parameters
,
,
CL and
Ress by the term (1 + ⅓·
St2):
For illustration purposes,
Table 2 shows how the correction factor (1 + ⅓·
St2), the ratio of total dynamic pressure and dynamic pressure,
Q/q∞, and the ratio of the Reynolds number of a flapping wing and the corresponding steady state Reynolds number of the same wing,
Re/
Ress, vary with Strouhal number,
St:
A desirable feature of the average normalized lift is its association with an empirical maximum value, , that makes it possible to read it on a stand-alone basis, as a “high” or “low” value, relative to . In a similar way, the lift coefficient of a fixed lifting surface can also be read on a stand-alone basis (which does not necessarily imply it is a physically proper figure of merit). This feature should not be taken for granted as is illustrated by the ubiquitous drag coefficient of an airplane of, say, 0.0345 or 345 counts (calculated using the customary wing planform as a reference area). This value cannot be read on a stand-alone basis as this value is not associated to a common maximum value CD max, and so, cannot be read as a “high” or low” value.




{kind=link}
{kind=link}
{kind=link}
{kind=link}