
The Effect of the Phase Angle between the Forewing and Hindwing on the Aerodynamic Performance of a Dragonfly-Type Ornithopter


Abstract
:
1. Introduction
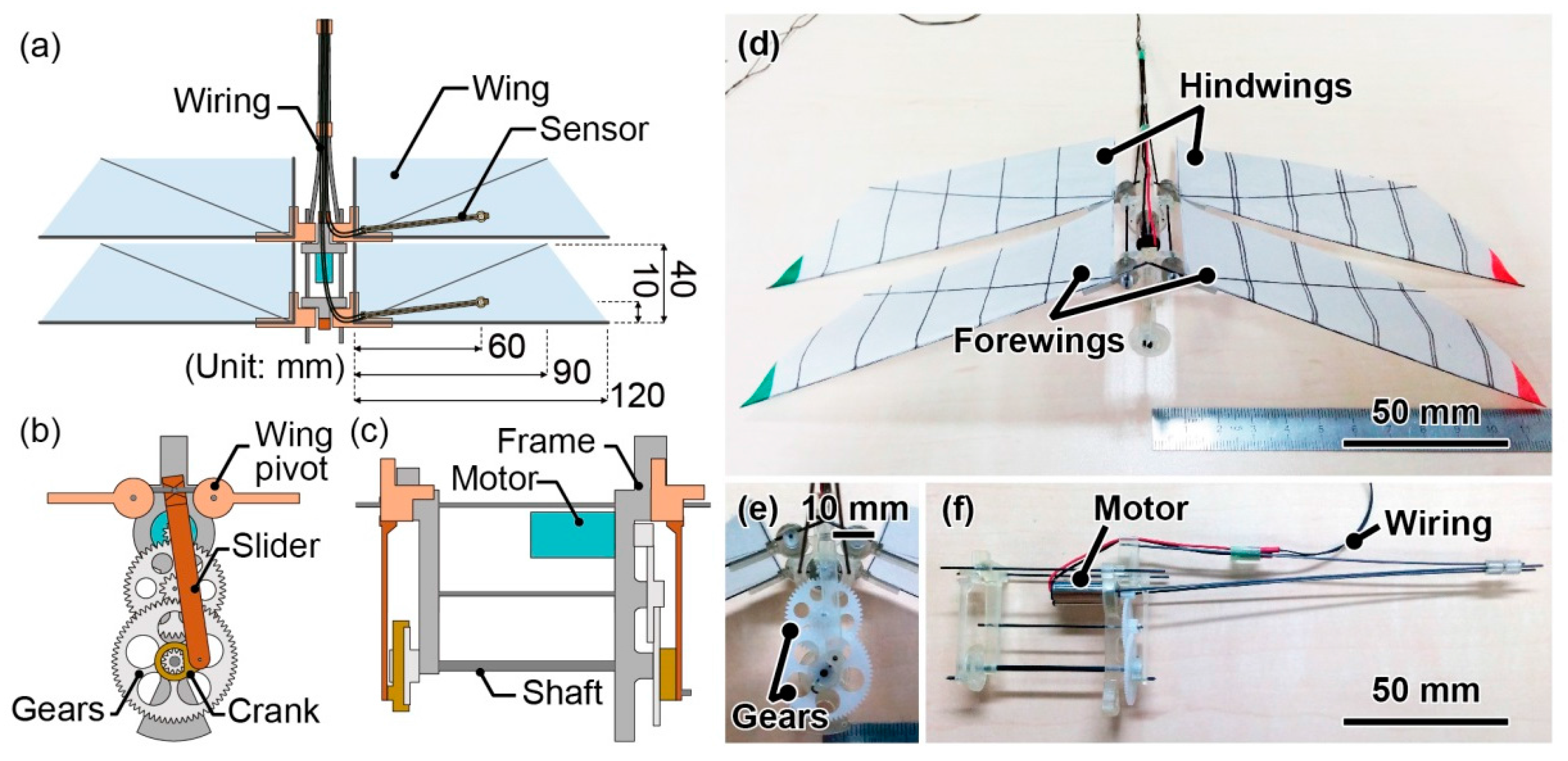
2. Design and Fabrication of the Dragonfly-Type Ornithopter


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Unit | A. Azuma, et al., 1985 [2] | A. Azuma & T. Watanabe, 1988 [4] | Ornithopter |
|---|---|---|---|---|
| Dragonfly species | Sympetrum frequens | Anax parthenope julius | ||
| Wing span s | mm | 66 | 107 | 276 |
| Aspect ratio AR | – | 9 | 8.9 | 6.9 |
| Flapping frequency f | Hz | 41.5 | 27.7 | 12 |
| Amplitude ψ | degrees | 45 | 29.5 | 30 |
| Wing load P | N/m2 | 2.6 | 3.5 | 4.6 |
| Reynolds number Re | – | 1737 | 1721 | 1670 |
| Reduced number k | – | 0.14 | 0.19 | 0.28 |

3. Experiments and Results of the Tethered Ornithopter
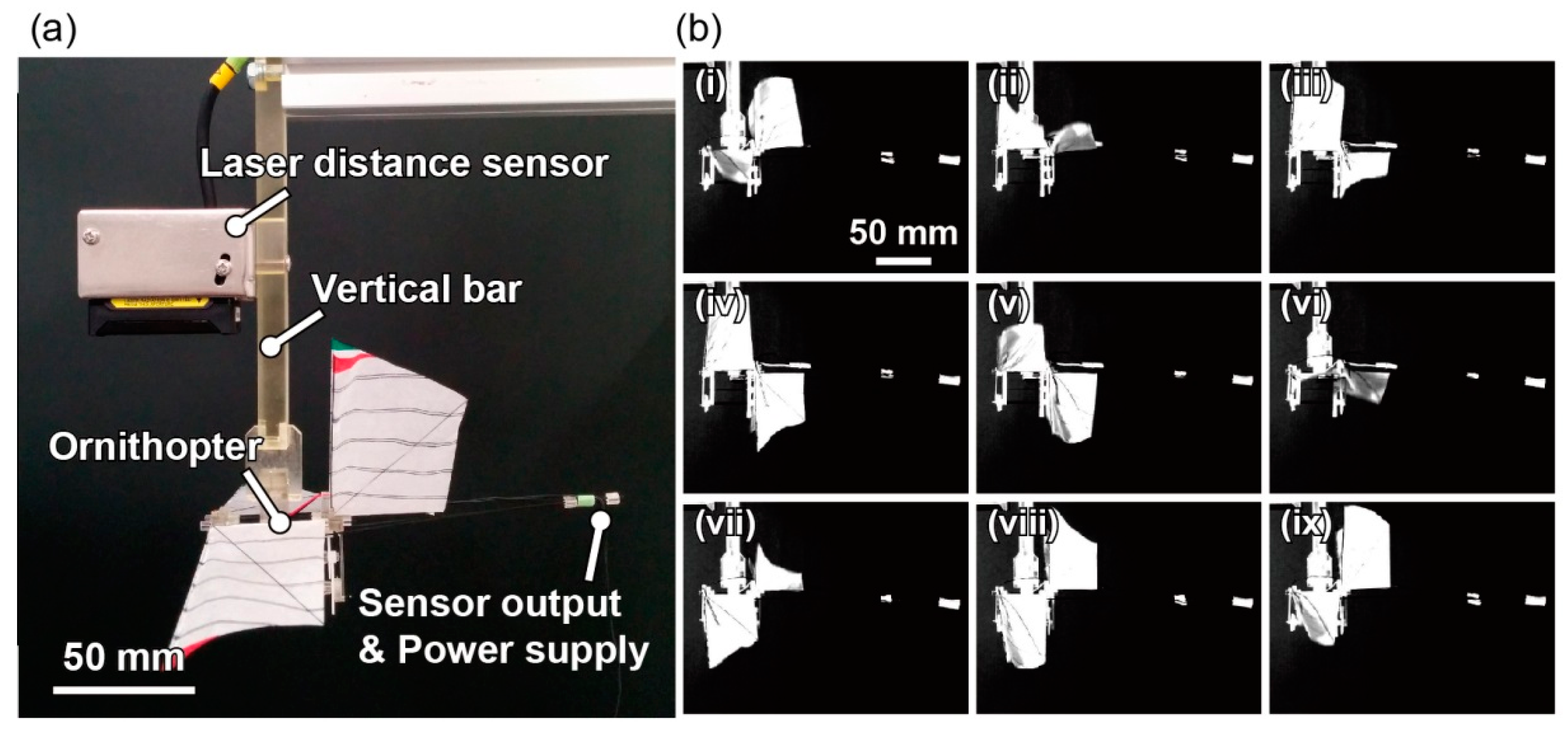
3.1. Experimental Setup


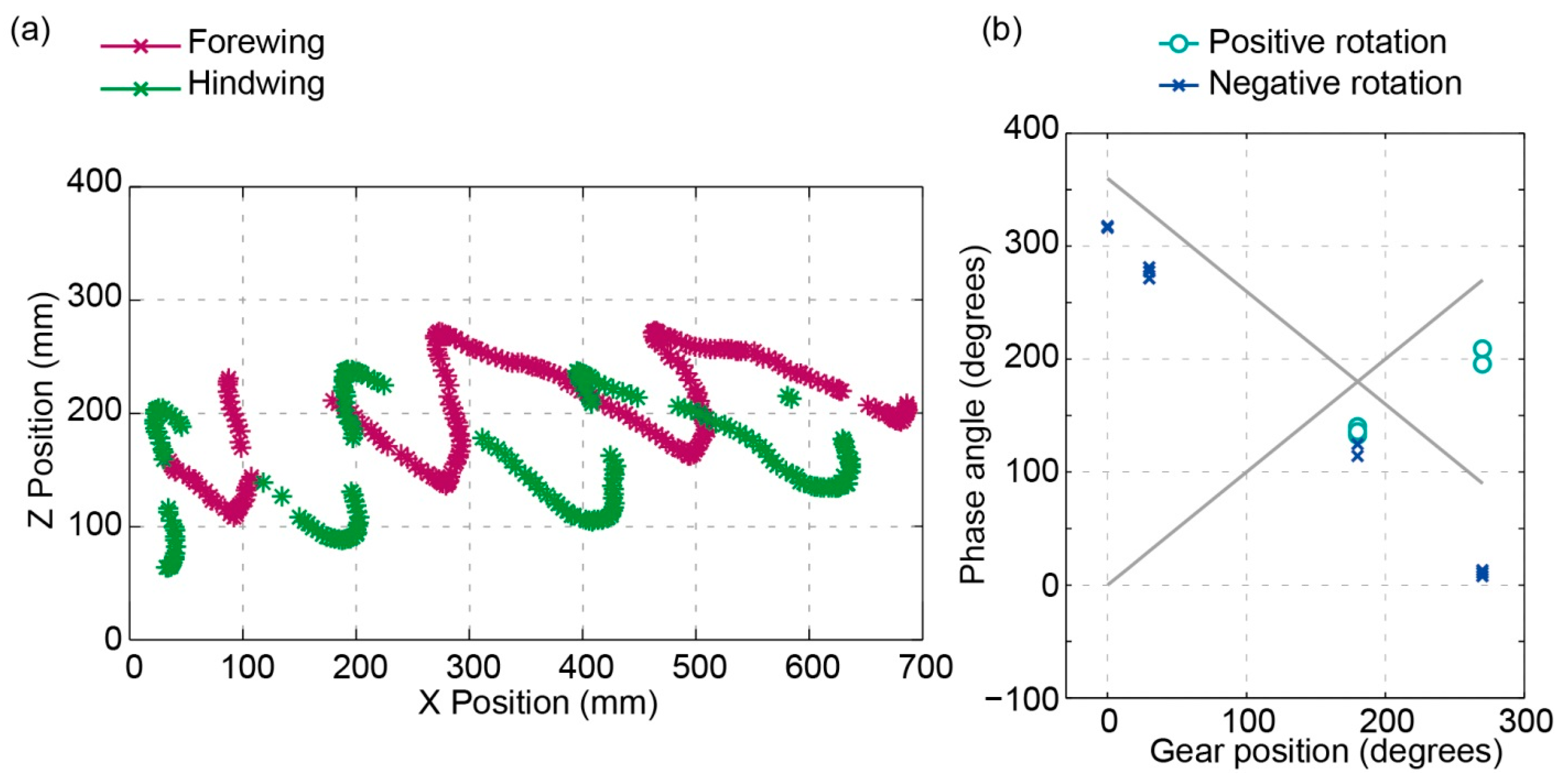
| Condition | Setting Angle (Degrees) | Rotation | Phase Angle (Degrees) | Frequency (Hz) |
|---|---|---|---|---|
| 1 | 0 | − | 315 | 11.4 |
| 2 | + | 308 | 11.6 | |
| 3 | 30 | − | 285 | 12.0 |
| 4 | + | 355 | 12.0 | |
| 5 | 90 | − | 215 | 12.0 |
| 6 | + | 53 | 11.5 | |
| 7 | 180 | − | 116 | 12.0 |
| 8 | + | 143 | 11.5 | |
| 9 | 270 | − | 32 | 11.5 |
| 10 | + | 225 | 12.0 |
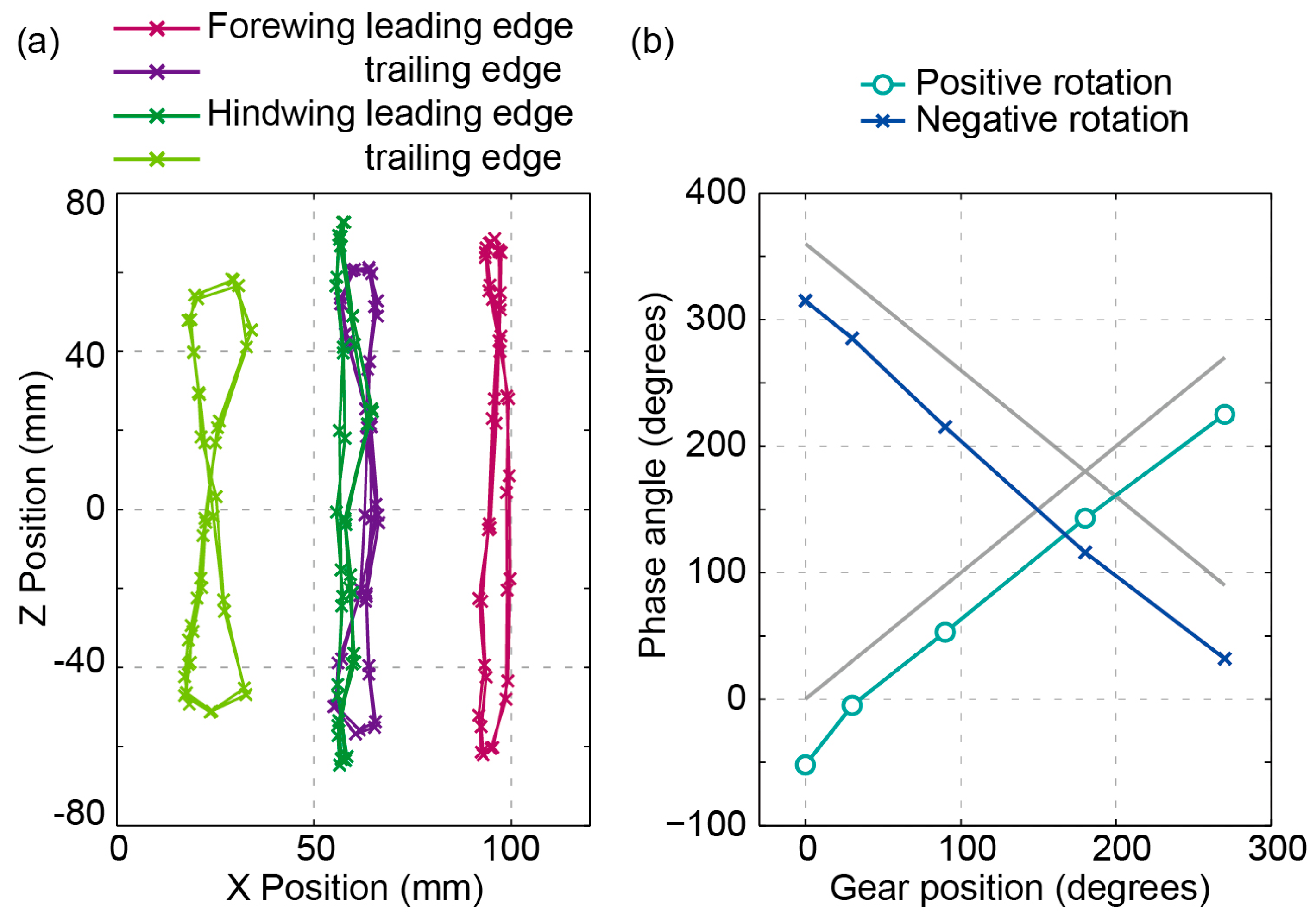
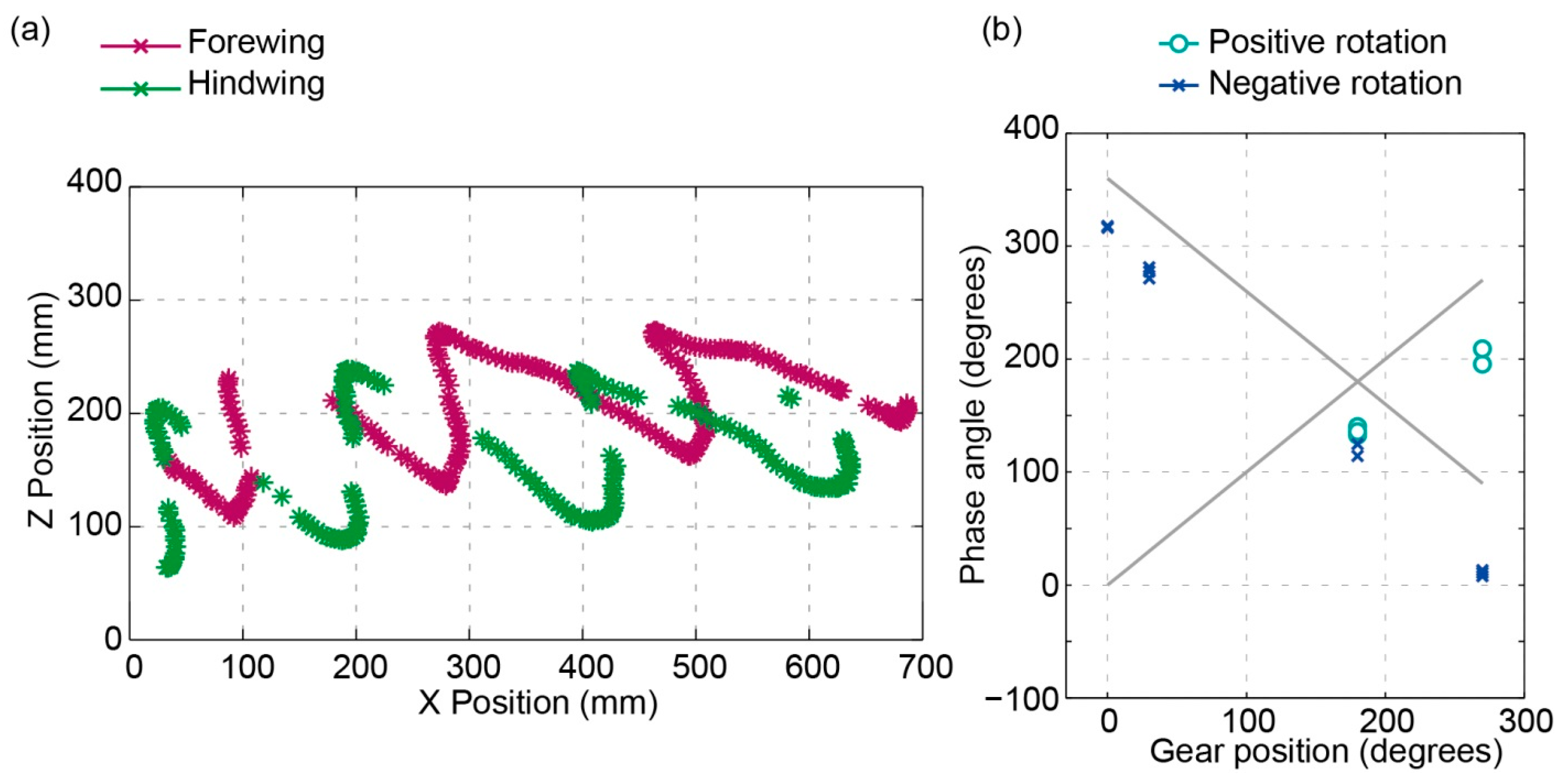
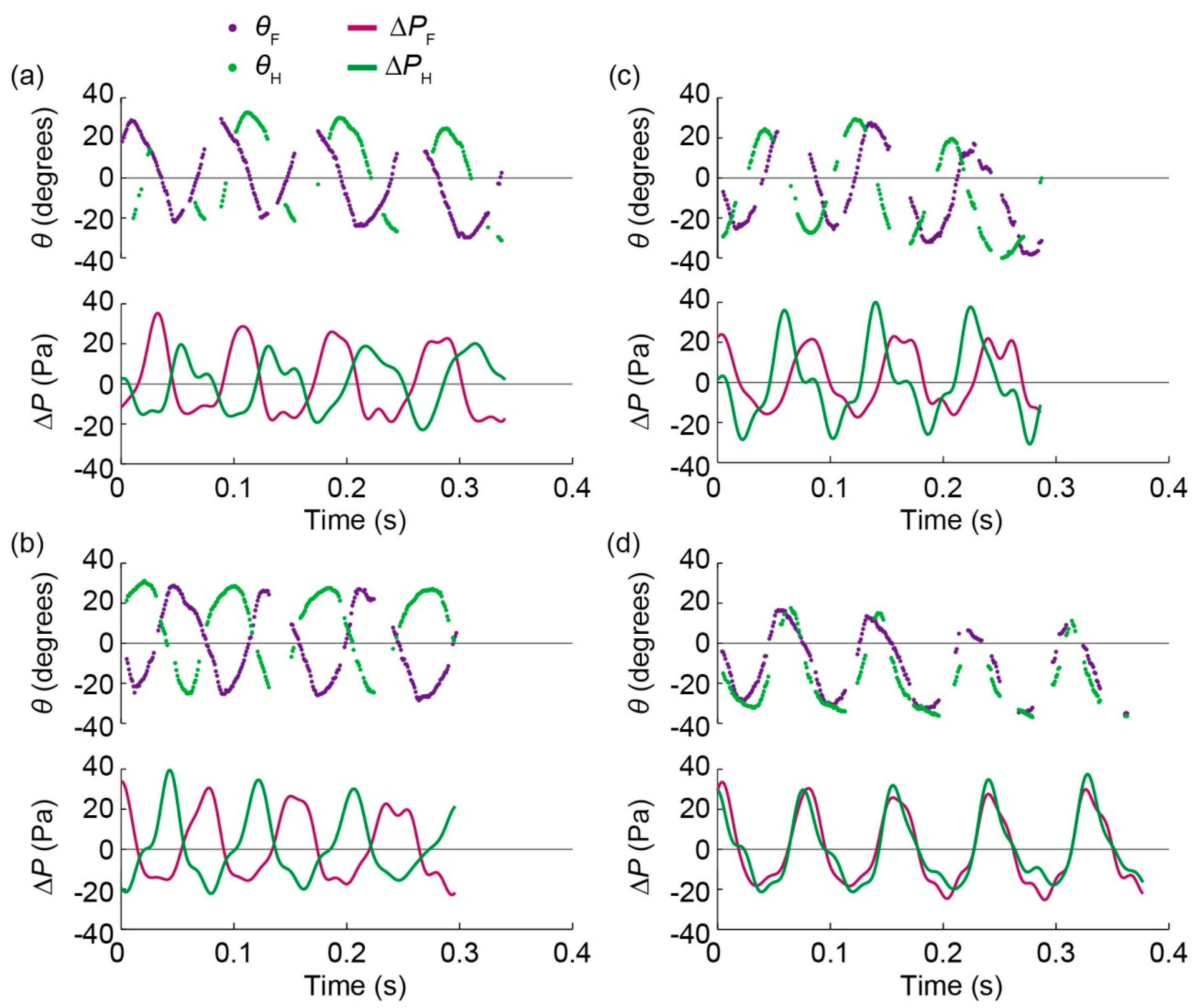
3.2. Experiments in Tethered Condition
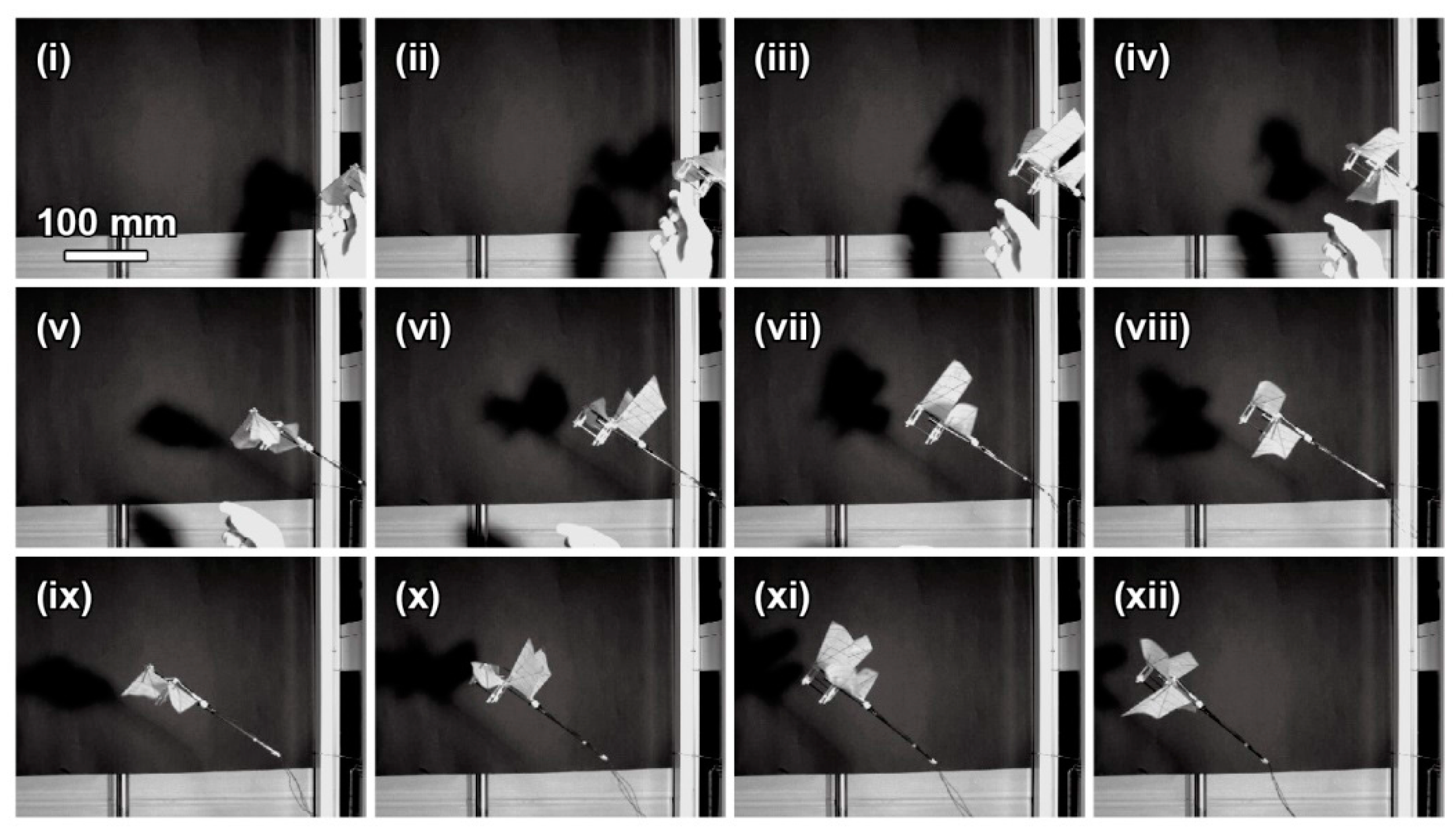
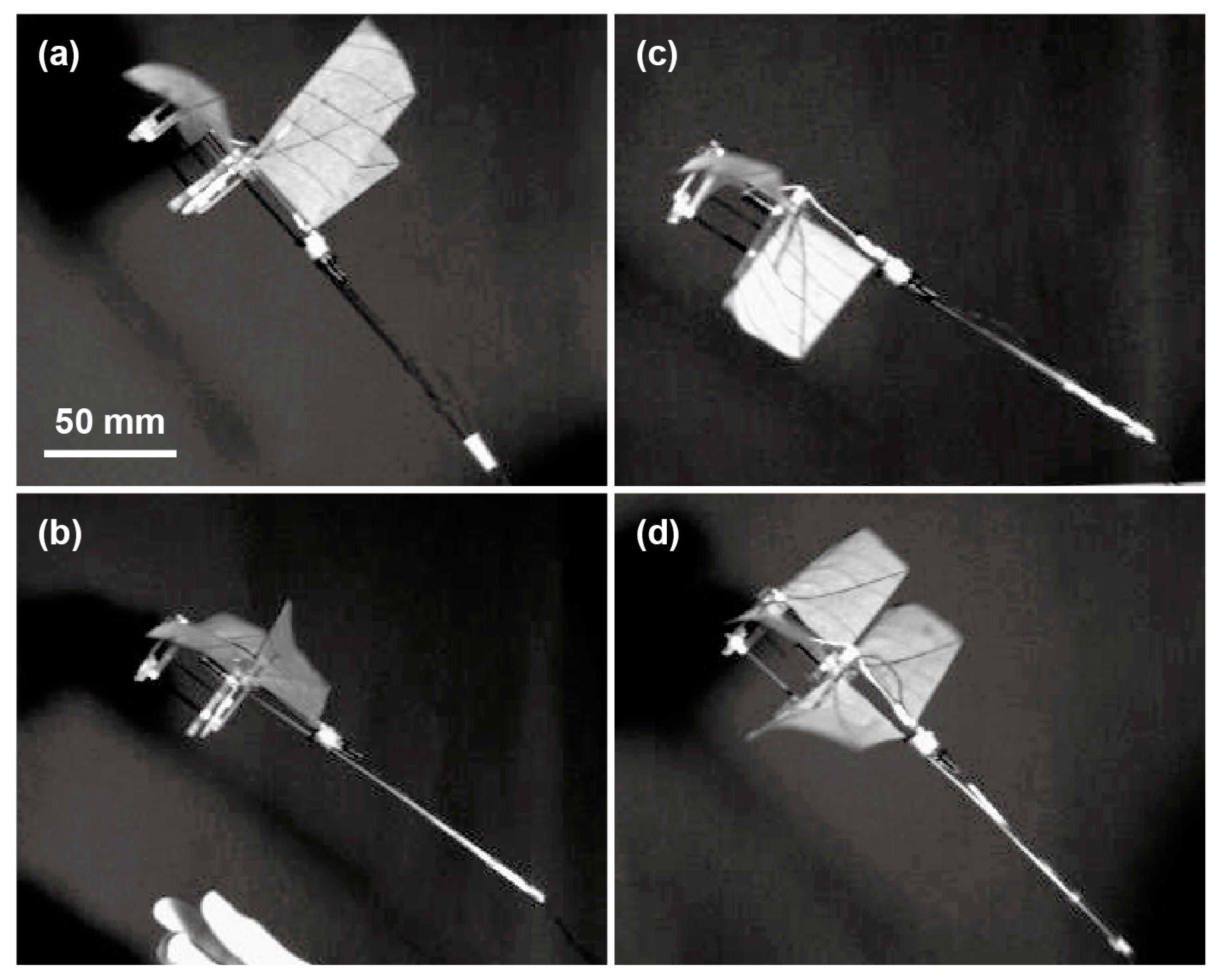
4. Demonstration of Free-Flight
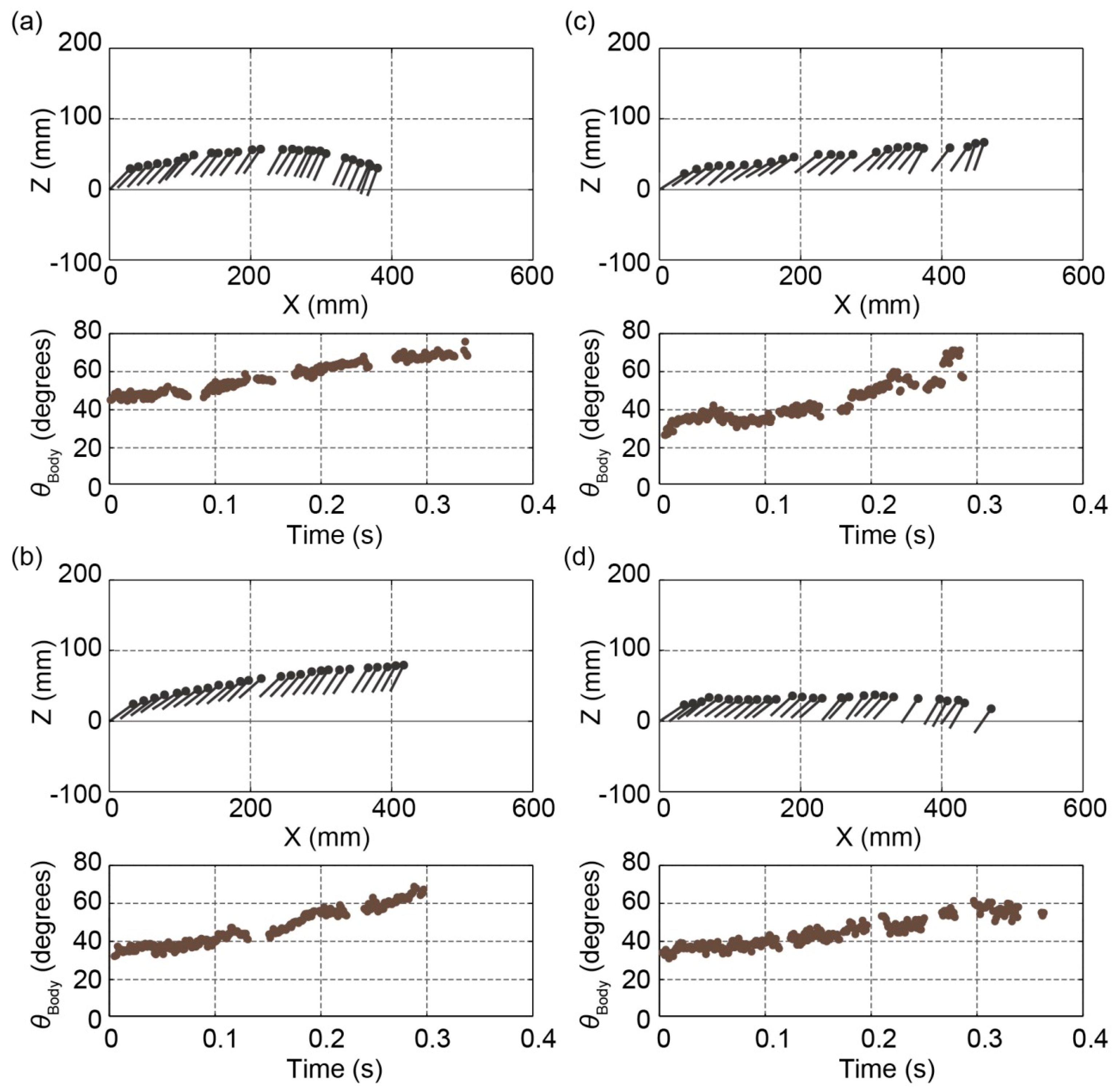
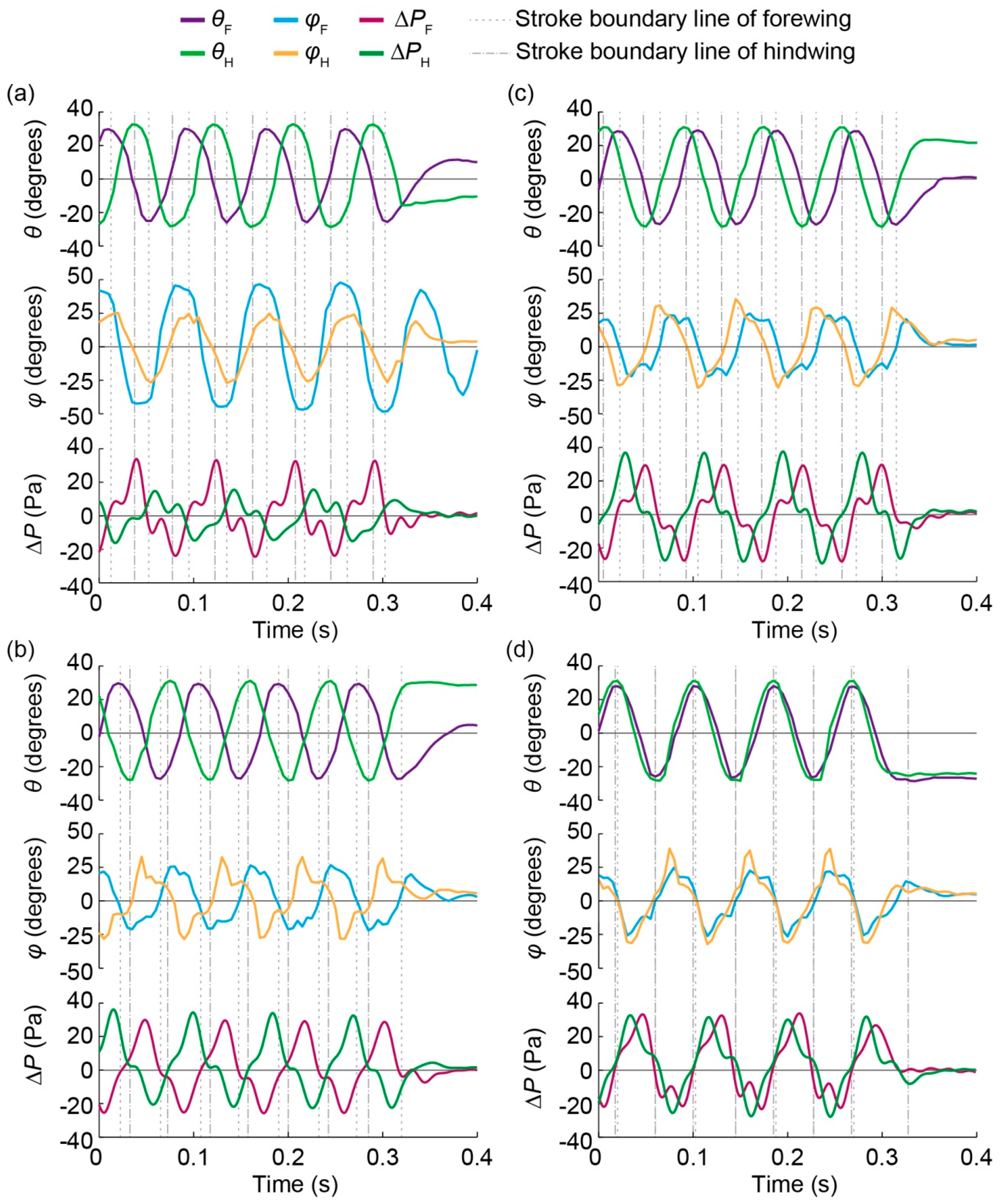
4.1. Flight Performance

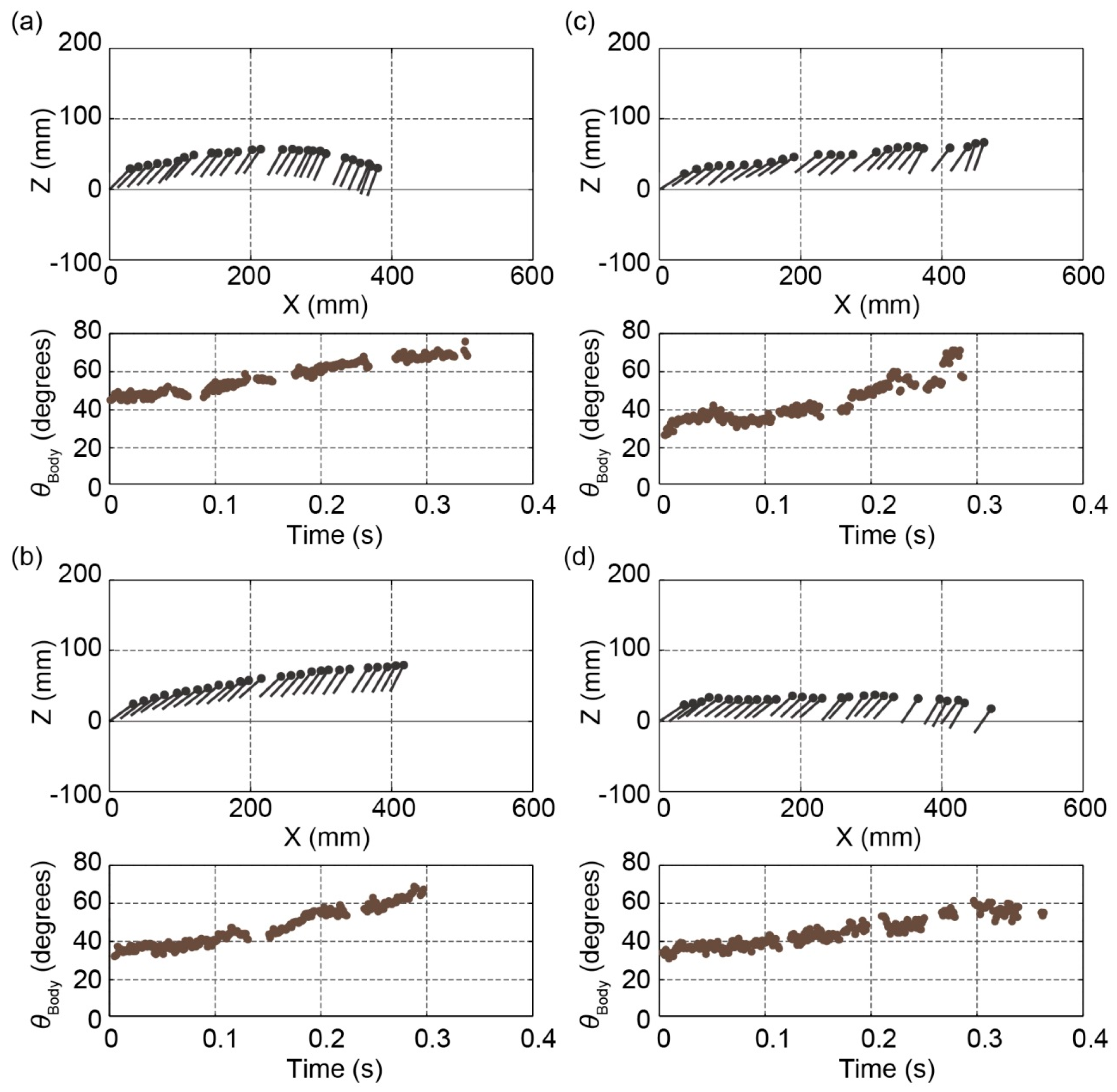
| Condition | Setting Angle (Degrees) | Rotation | Phase Angle (Degrees) | Frequency (Hz) | Initial Body Angle (Degrees) |
|---|---|---|---|---|---|
| 1 | 0 | − | 318 | 14.9 | 26 |
| 2 | − | 316 | 15.0 | 43 | |
| 3 | 30 | − | 281 | 12.7 | 31 |
| 4 | − | 277 | 11.6 | 27 | |
| 5 | − | 271 | 11.9 | 35 | |
| 6 | 180 | − | 114 | 11.7 | 46 |
| 7 | − | 125 | 11.5 | 41 | |
| 8 | + | 133 | 12.8 | 36 | |
| 9 | + | 140 | 12.7 | 33 | |
| 10 | + | 136 | 13.1 | 27 | |
| 11 | 270 | − | 13 | 12.0 | 34 |
| 12 | − | 8 | 12.5 | 36 | |
| 13 | − | 10 | 12.3 | 36 | |
| 14 | + | 195 | 12.0 | 32 | |
| 15 | + | 209 | 12.2 | 28 |

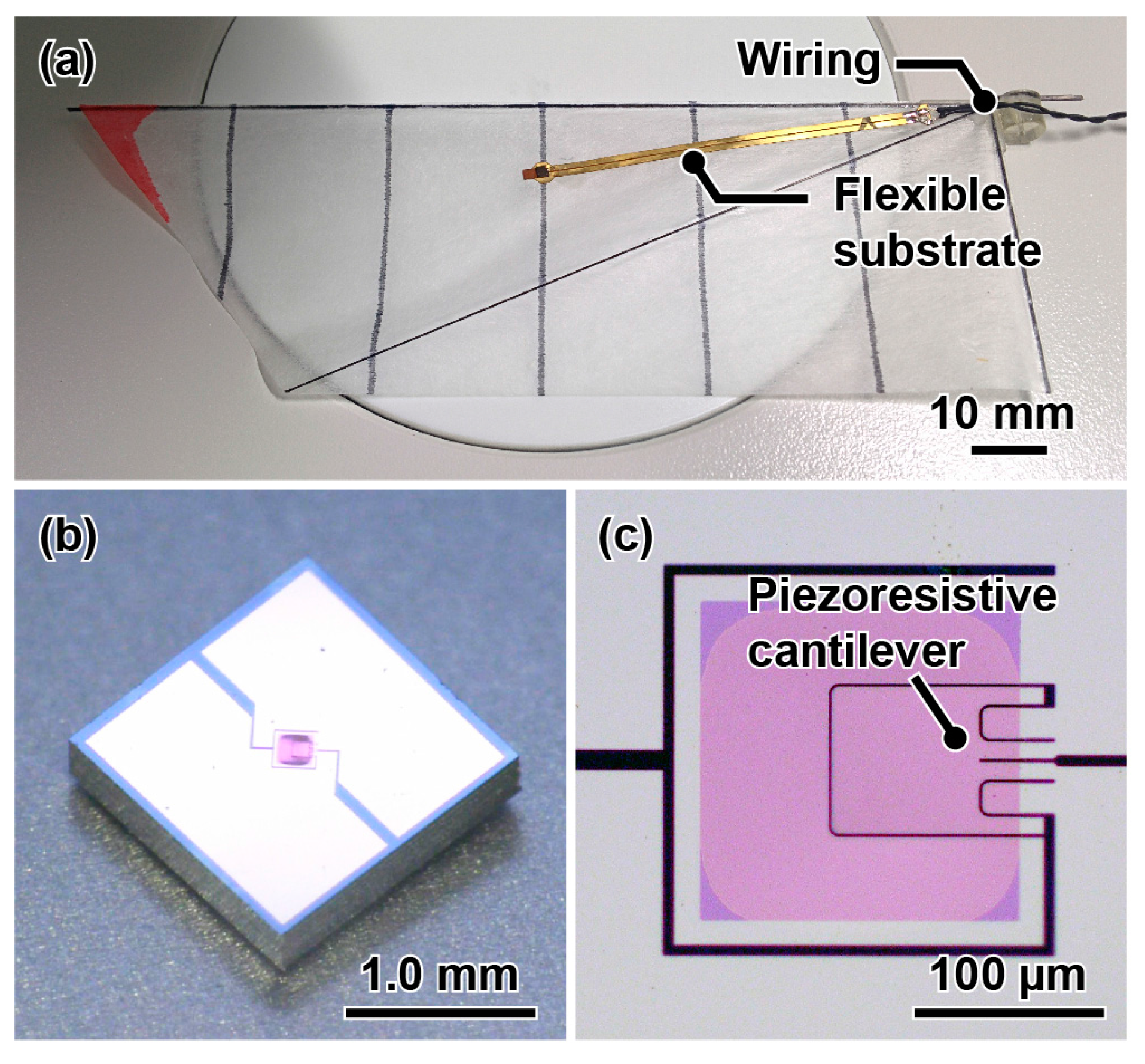
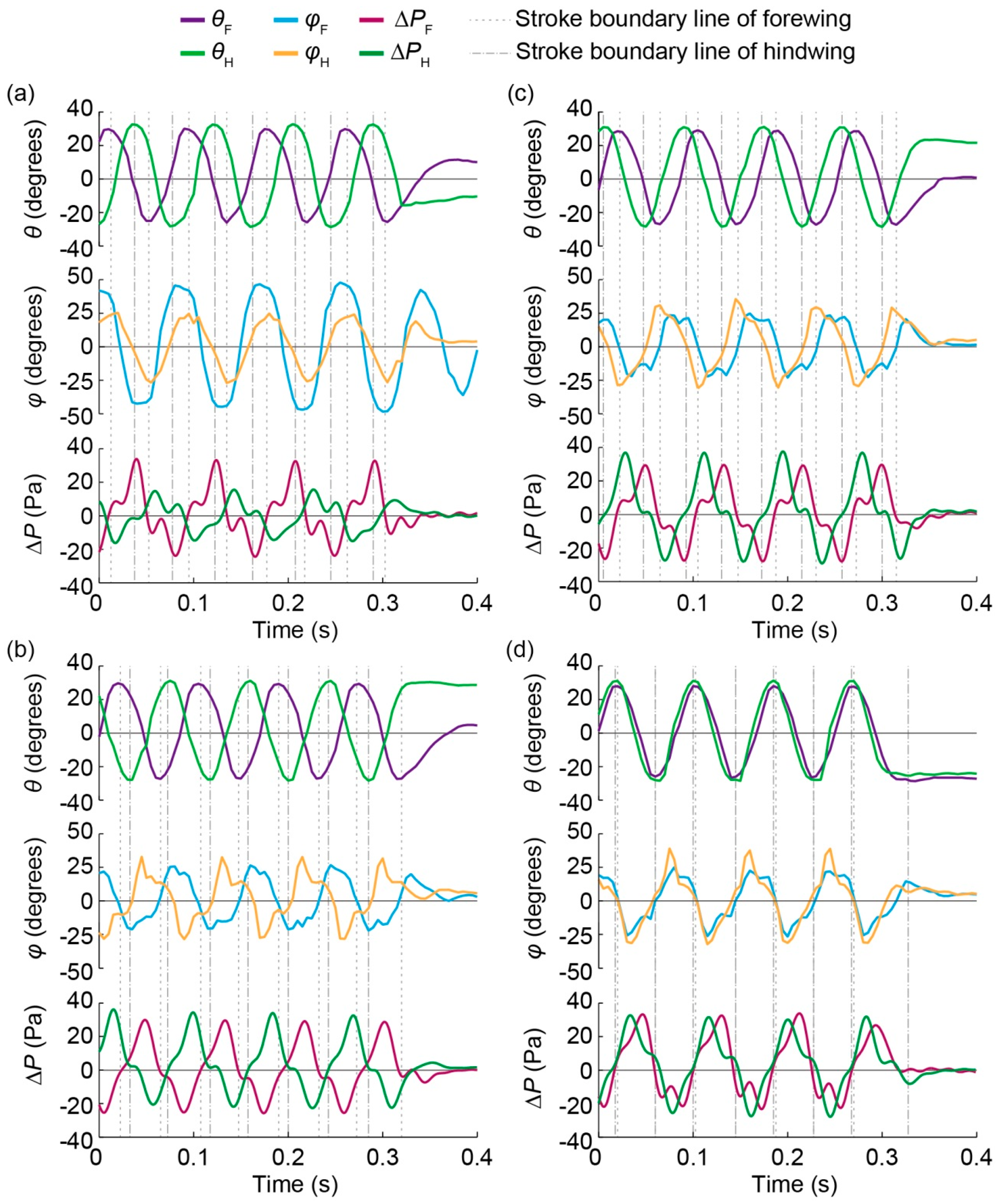
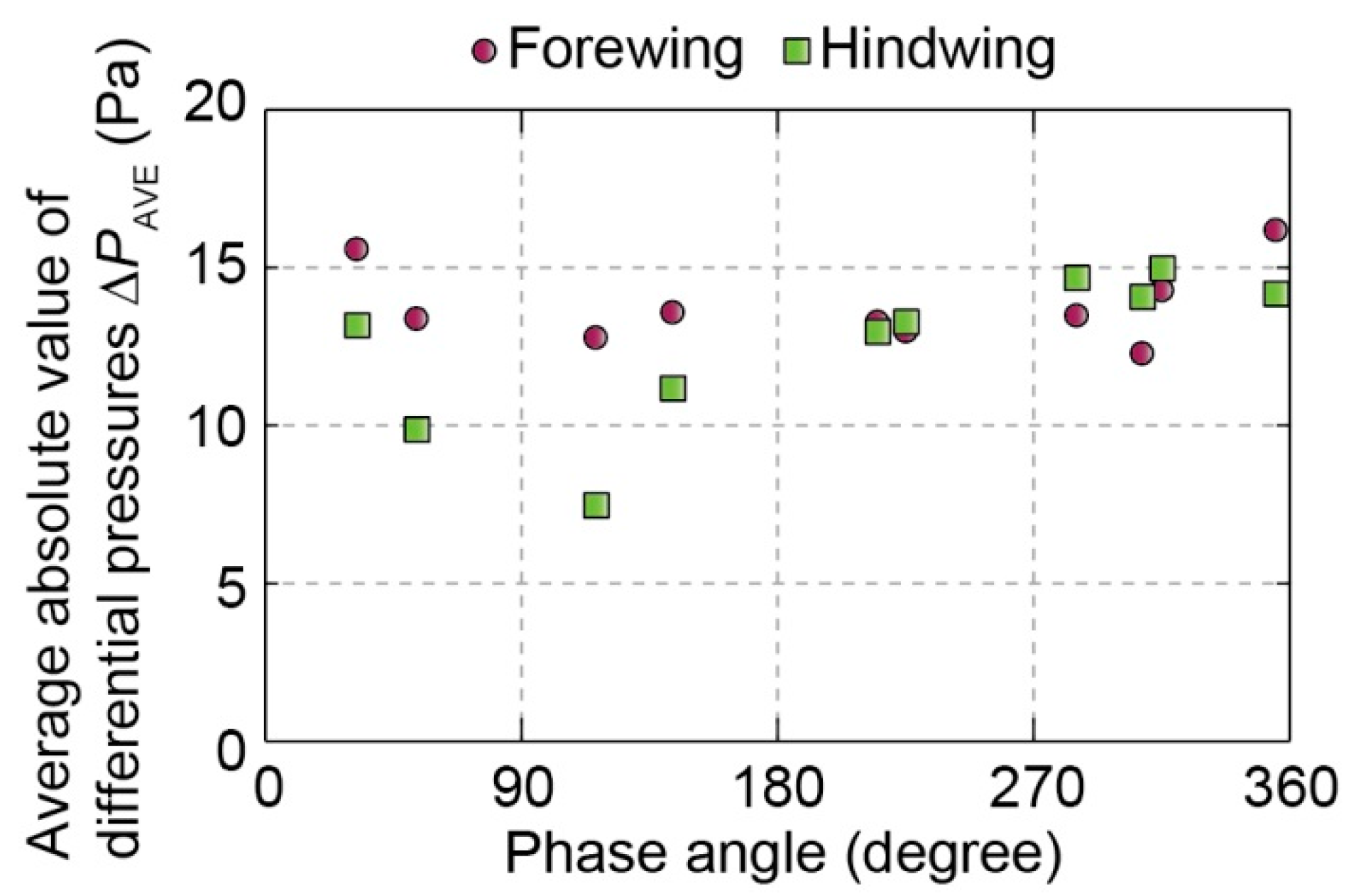
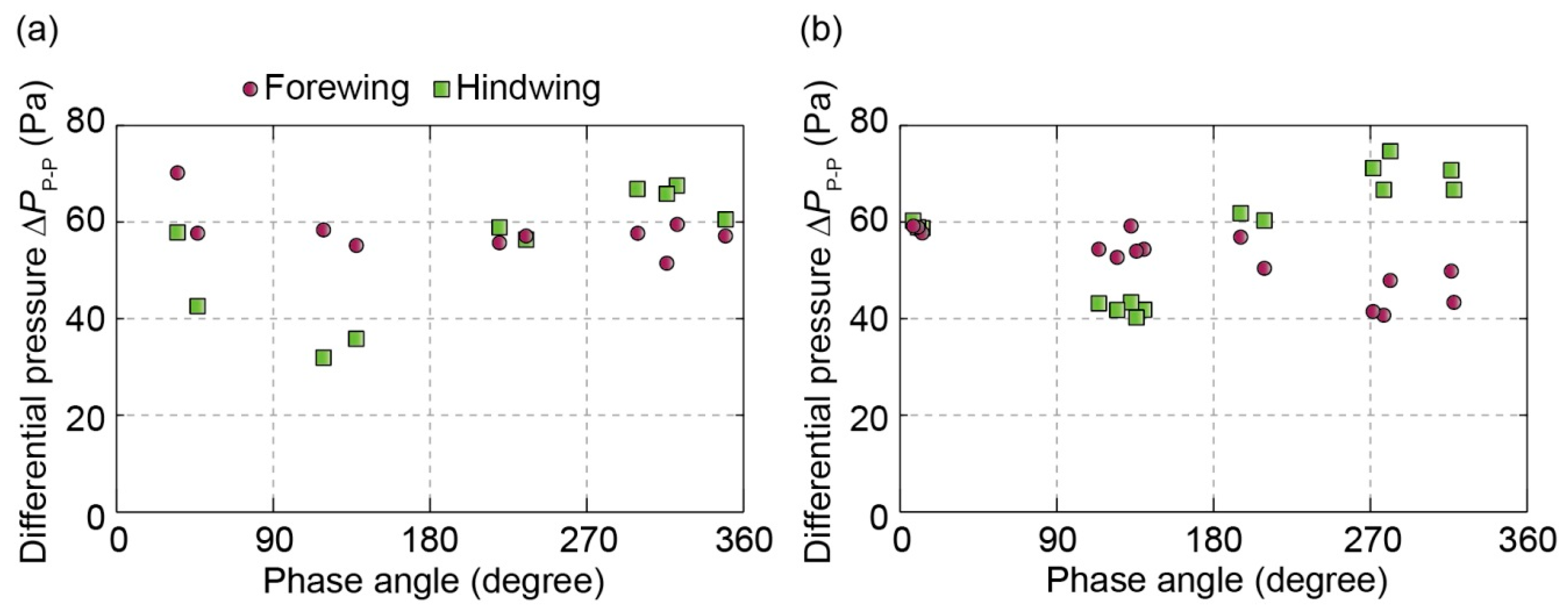
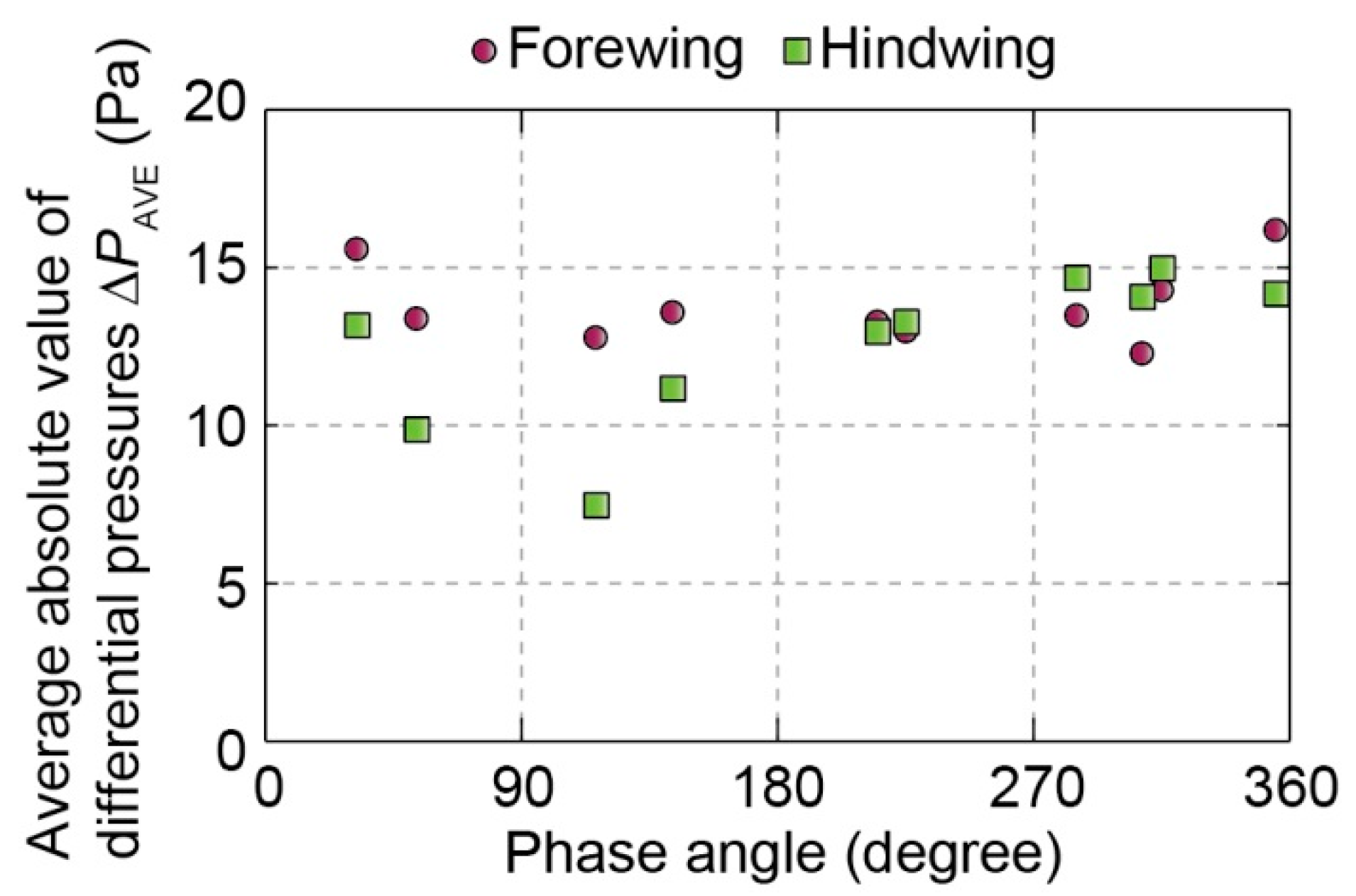
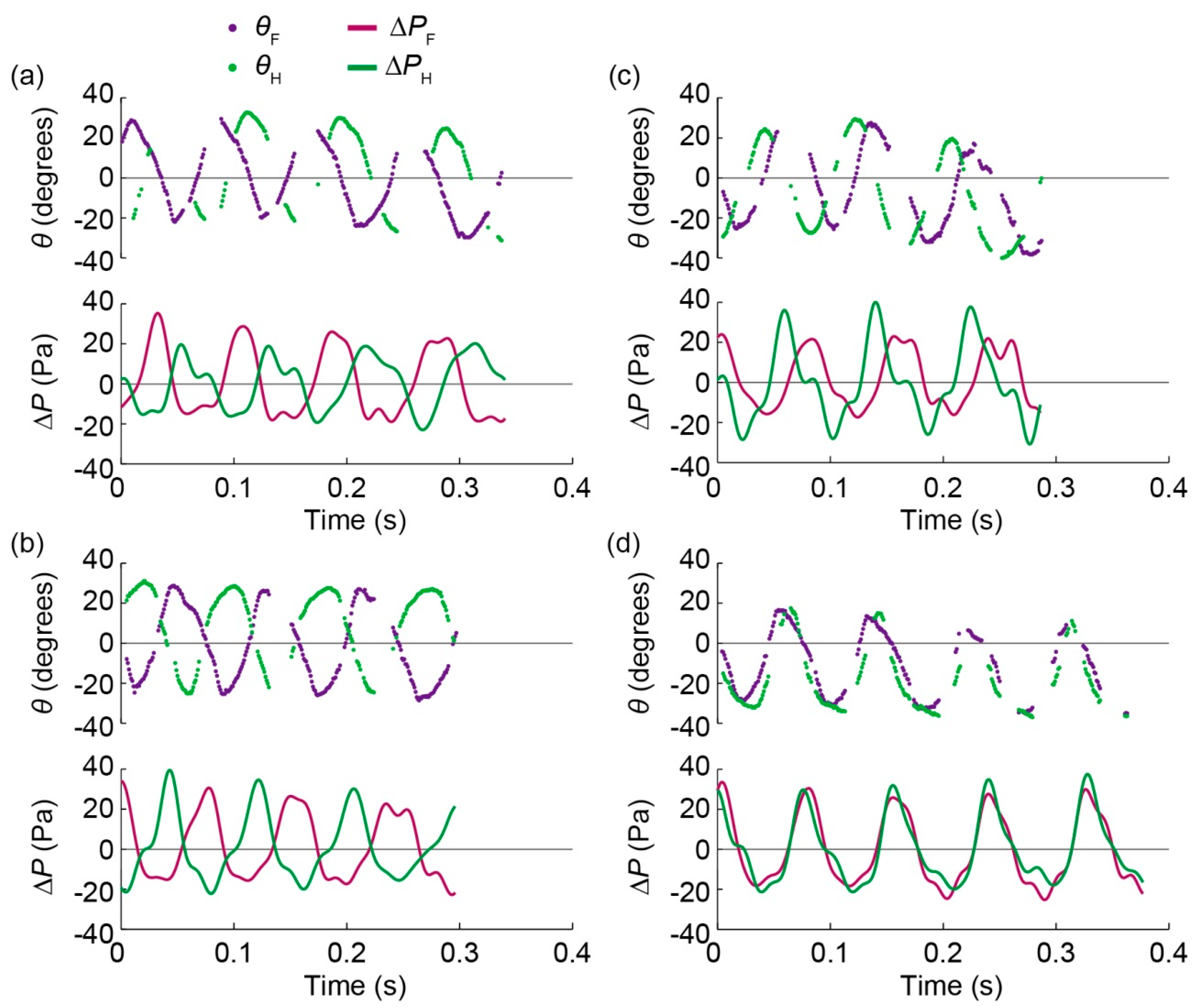
4.2. Differential Pressure Measurement
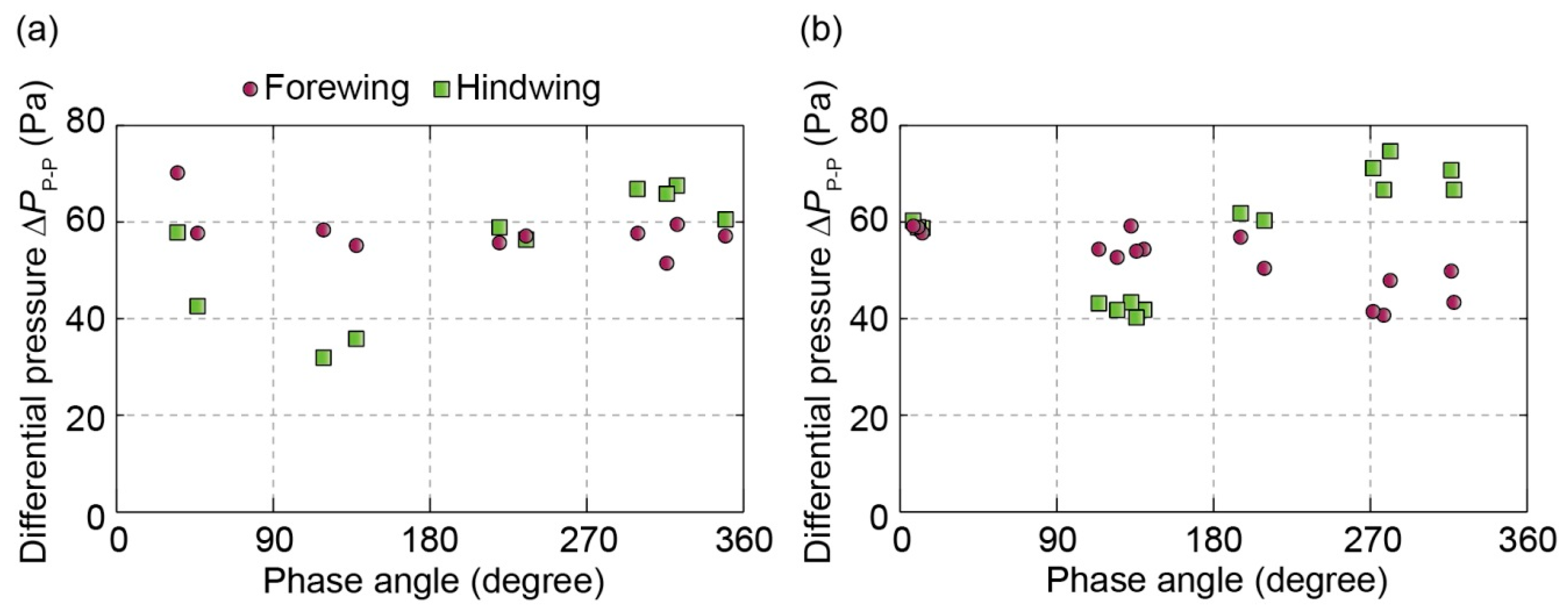
4.3. Discussion
5. Conclusions
Supplementary Files
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Alexander, D.E. Unusual Phase-Relationships between the Forewings and Hindwings in Flying Dragonflies. J. Exp. Biol. 1984, 109, 379–383. [Google Scholar]
- Azuma, A.; Azuma, S.; Watanabe, I.; Furuta, T. Flight Mechanics of a Dragonfly. J. Exp. Biol. 1985, 116, 79–107. [Google Scholar]
- Somps, C.; Luttges, M. Dragonfly Flight—Novel Uses of Unsteady Separated Flows. Science 1985, 228, 1326–1329. [Google Scholar] [CrossRef] [PubMed]
- Azuma, A.; Watanabe, T. Flight Performance of a Dragonfly. J. Exp. Biol. 1988, 137, 221–252. [Google Scholar]
- Wakeling, J.M.; Ellington, C.P. Dragonfly flight. II. Velocities, Accelerations and Kinematics of Flapping Flight. J. Exp. Biol. 1997, 200, 557–582. [Google Scholar] [PubMed]
- Ruppell, G. Kinematic Analysis of Symmetrical Flight Maneuvers of Odonata. J. Exp. Biol. 1989, 144, 13–42. [Google Scholar]
- Wang, H.; Zeng, L.; Liu, H.; Yin, C. Measuring Wing Kinematics, Flight Trajectory and Body Attitude during Forward Flight and Turning Maneuvers in Dragonflies. J. Exp. Biol. 2003, 206, 745–757. [Google Scholar] [CrossRef] [PubMed]
- Thomas, A.L.R.; Taylor, G.K.; Srygley, R.B.; Nudds, R.L.; Bomphrey, R.J. Dragonfly Flight: Free-Flight and Tethered Flow Visualizations Reveal a Diverse Array of Unsteady Lift-Generating Mechanisms, Controlled Primarily via Angle of Attack. J. Exp. Biol. 2004, 207, 4299–4323. [Google Scholar] [CrossRef] [PubMed]
- Maybury, W.L.; Lehmann, F.O. The Fluid Dynamics of Flight Control by Kinematic Phase Lag Variation between Two Robotic Insect Wings. J. Exp. Biol. 2004, 207, 4707–4726. [Google Scholar] [CrossRef] [PubMed]
- Usherwood, J.R.; Lehmann, F.O. Phasing of Dragonfly Wings Can Improve Aerodynamic Efficiency by Removing Swirl. J. R. Soc. Interface 2008, 5, 1303–1307. [Google Scholar] [CrossRef] [PubMed]
- Hu, Z.; Deng, X.Y. Aerodynamic Interaction between Forewing and Hindwing of a Hovering Dragonfly. Acta Mech. Sin. 2014, 30, 787–799. [Google Scholar] [CrossRef]
- Zheng, Y.; Wu, Y.; Tang, H. Force Measurements of Flexible Tandem Wings in Hovering and Forward Flights. Bioinspir. Biomim. 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Sun, M.; Lan, S.L. A Computational Study of the Aerodynamic Forces and Power Requirements of Dragonfly (Aeschna Juncea) Hovering. J. Exp. Biol. 2004, 207, 1887–1901. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.K.; Sun, M. A Computational Study of the Aerodynamics and Forewing-Hindwing Interaction of a Model Dragonfly in Forward Flight. J. Exp. Biol. 2005, 208, 3785–3804. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Sun, M. Dragonfly Forewing-Hindwing Interaction at Various Flight Speeds and Wing Phasing. AIAA J. 2007, 45, 508–511. [Google Scholar]
- Wang, Z.J.; Russell, D. Effect of Forewing and Hindwing Interactions on Aerodynamic Forces and Power in Hovering Dragonfly Flight. Phys. Rev. Lett. 2007, 99. [Google Scholar] [CrossRef] [PubMed]
- Broering, T.; Lian, Y.-S. The Effect of Phase Angle and Wing Spacing on Tandem Flapping Wings. Acta Mech. Sin. 2012, 28, 1557–1571. [Google Scholar] [CrossRef]
- Nakata, T.; Liu, H.; Tanaka, Y.; Nishihashi, N.; Wang, X.; Sato, A. Aerodynamics of a Bio-Inspired Flexible Flapping-Wing Micro Air Vehicle. Bioinspir. Biomim. 2011, 6. [Google Scholar] [CrossRef] [PubMed]
- De Croon, G.C.; Groen, M.A.; de Wagter, C.; Remes, B.; Ruijsink, R.; van Oudheusden, B.W. Design, Aerodynamics and Autonomy of the DelFly. Bioinspir. Biomim. 2012, 7. [Google Scholar] [CrossRef] [PubMed]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012.
- Tanaka, H.; Shimoyama, I. Forward Flight of Swallowtail Butterfly with Simple Flapping Motion. Bioinspir. Biomim. 2010, 5. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, H.; Aoyama, Y.; Ohsawa, K.; Tanaka, H.; Iwase, E.; Matsumoto, K.; Shimoyama, I. Differential Pressure Measurement Using a Free-Flying Insect-Like Ornithopter with an MEMS Sensor. Bioinspir. Biomim. 2010, 5. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, H.; Sato, K.; Matsumoto, K.; Shimoyama, I. Measuring Differential Pressures with Multiple MEMS Sensors during Takeoff of an Insect-Like Ornithopter. J. Biomech. Sci. Eng. 2014, 9. [Google Scholar] [CrossRef]
- Takahashi, H.; Minh-Dung, N.; Matsumoto, K.; Shimoyama, I. Differential Pressure Sensor Using a Piezoresistive Cantilever. J. Micromech. Microeng. 2012, 22, 991–1008. [Google Scholar] [CrossRef]
- Takahashi, H.; Matsumoto, K.; Shimoyama, I. Differential Pressure Distribution Measurement for the Development of Insect-Sized Wings. Meas. Sci. Technol. 2013, 24. [Google Scholar] [CrossRef]
- Takahashi, H.; Tanaka, H.; Matsumoto, K.; Shimoyama, I. Differential Pressure Distribution Measurement with an MEMS Sensor on a Free-Flying Butterfly Wing. Bioinspir. Biomim. 2012, 7. [Google Scholar] [CrossRef] [PubMed]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takahashi, H.; Concordel, A.; Paik, J.; Shimoyama, I. The Effect of the Phase Angle between the Forewing and Hindwing on the Aerodynamic Performance of a Dragonfly-Type Ornithopter. Aerospace 2016, 3, 4. https://doi.org/10.3390/aerospace3010004
Takahashi H, Concordel A, Paik J, Shimoyama I. The Effect of the Phase Angle between the Forewing and Hindwing on the Aerodynamic Performance of a Dragonfly-Type Ornithopter. Aerospace. 2016; 3(1):4. https://doi.org/10.3390/aerospace3010004
Chicago/Turabian StyleTakahashi, Hidetoshi, Alice Concordel, Jamie Paik, and Isao Shimoyama. 2016. "The Effect of the Phase Angle between the Forewing and Hindwing on the Aerodynamic Performance of a Dragonfly-Type Ornithopter" Aerospace 3, no. 1: 4. https://doi.org/10.3390/aerospace3010004
APA StyleTakahashi, H., Concordel, A., Paik, J., & Shimoyama, I. (2016). The Effect of the Phase Angle between the Forewing and Hindwing on the Aerodynamic Performance of a Dragonfly-Type Ornithopter. Aerospace, 3(1), 4. https://doi.org/10.3390/aerospace3010004