Abstract
This paper presents a flight control framework based on neural network Model Predictive Control (NN-MPC) to tackle the challenges of acceleration command tracking for supersonic vehicles (SVs) in complex flight environments, addressing the shortcomings of traditional methods in managing nonlinearity, random disturbances, and real-time performance requirements. Initially, a dynamic model is developed through a comprehensive analysis of the vehicle’s dynamic characteristics, incorporating strong cross-coupling effects and disturbance influences. Subsequently, a predictive mechanism is employed to forecast future states and generate virtual control commands, effectively resolving the issue of sluggish responses under rapidly changing commands. Furthermore, the approximation capability of neural networks is leveraged to optimize the control strategy in real time, ensuring that rudder deflection commands adapt to disturbance variations, thus overcoming the robustness limitations inherent in fixed-parameter control approaches. Within the proposed framework, the ultimate uniform bounded stability of the control system is rigorously established using the Lyapunov method. Simulation results demonstrate that the method exhibits exceptional performance under conditions of system state uncertainty and unknown external disturbances, confirming its effectiveness and reliability.
1. Introduction
In a supersonic vehicle (SV) system, the control system, capable of rapidly responding to maneuver commands and precisely controlling the flight attitude, has become an indispensable component during its flight. The SV is equipped with a booster rocket, two pairs of rudders, and tail fins while integrating navigation, guidance, and control systems. The vehicle deploys two pairs of rudders after being propelled by the rocket to a designated gliding altitude. During the active control phase of flight, the symmetrically arranged tail fins provide passive stability, and the roll rate stabilizes under the combined influence of the guiding torque generated by the tail fins and the aerodynamic damping torque to enhance the SV’s structural stability and disturbance rejection capability [1,2]. The two pairs of control surfaces at the SV’s front enable precise attitude adjustments by deflecting at angles specified by control commands during the active control phase. The navigation system supplies flight status and guidance data, while the guidance and control system adjusts the flight trajectory by manipulating rudder deflections, enabling the vehicle to follow a pre-planned path until it strikes the target [3]. Achieving precise tracking of the predetermined trajectory necessitates an advanced control approach. A spinning vehicle rotates around its axis of symmetry to ensure stability. However, this rotational motion induces cross-coupling between control channels. Although the spin rate is mitigated by the tail fin structure, the strong coupling effects render the design of the control method highly intricate. Moreover, the SV exhibits significant sensitivity to uncertainties in the dynamic model and external random disturbances, presenting substantial challenges to the design process.
To ensure stable flight of an SV, a controller must be designed to precisely track the reference acceleration commands generated by the guidance law. The smaller the error between the real-time command and the reference signal, the better the control performance [4]. In existing research, various control strategies have been employed for acceleration tracking in vehicles, particularly under conditions characterized by high dynamics and significant disturbances. These strategies encompass Proportional Integral Derivative (PID) controllers [5,6], sliding mode controllers (SMCs) [7], two-step anti-saturation compensation controllers [8], Model Adaptive Reference Control (MARC) [9,10], Model Predictive Control (MPC) [11,12], and terminal sliding mode controllers based on intelligent algorithms [13,14,15]. However, these approaches typically assume that disturbances are deterministic or statically bounded, thereby overlooking their time-varying nature and mode-switching characteristics. Furthermore, when applied to SVs, these methods often simplify the complex dynamic models.
In prior studies, Sun CY et al. [16] proposed a novel robust nonlinear control method to tackle system nonlinearities. While effective for missiles, this approach did not sufficiently mitigate the impact of disturbances. Mu CX et al. [17] introduced a continuous sliding mode control method incorporating a disturbance observer, which was successfully implemented for acceleration tracking in hypersonic vehicles. However, it neglected the strong coupling between control channels. Chunodkar A et al. [18] developed a nonlinear control method based on a model-dependent observer to stabilize rigid body attitude and achieve tracking control. Similarly, Shen YC et al. [19] designed a controller integrating Dynamic Surface Control (DSC) and backstepping techniques, offering a simpler principle compared to unimproved controllers and eliminating high-order derivatives in guidance commands. Nevertheless, both methods fall short of delivering optimal tracking performance when confronted with complex disturbances and highly dynamic nonlinear systems. Across various control studies, most researchers have enhanced observers and combined them with sliding mode control techniques. Although these refined control methods can achieve convergence within a finite time, their capability to estimate disturbances remains constrained [20,21,22,23].
Yu J et al. [24] integrate cyclic transmission feedback and gain scheduling to design a robust autopilot. Yan XY et al. [25] develop a controller accounting for nonlinear coupling characteristics tailored to missiles. Trajectory Linearization Control (TLC) offers a dual-layer design paradigm that is widely validated for nonlinear flight controllers [26,27,28], and Chen Q et al. [29] enhance TLC with Improved Sliding Mode Control (ISMC) and Extended State Observer (ESO), effectively mitigating the strong coupling and disturbance effects in spinning projectiles. However, a common limitation persists across these methods, which is that their parameters exhibit insufficient sensitivity to dynamic characteristics, resulting in suboptimal performance under varying disturbances or uncertainties. Meanwhile, Pane Y et al. [30] designed a Proportional Integral Derivative (PID) controller based on deep reinforcement learning for the command tracking control of ground robots. While it achieves an adaptive response, it lacks rigorous proof of stability.
Kim J et al. [31] leverages a disturbance observer-based neural network control to enhance robustness against unknown disturbances, but the neural network does not directly address disturbances, and its fixed parameters remain insensitive to changes. Bakshi N et al. [32] effectively introduce neural networks into the sliding mode control method, achieving satisfactory asymptotic tracking performance. However, the discontinuous sliding mode control results in intermittent training data obtained by the neural network. If applied to objects with higher dynamic characteristics, this leads to an increase in approximation error and poor convergence performance.
To tackle these deficiencies, this paper first constructs a precise dynamics model embeddable within the proposed framework, addressing the strong nonlinear cross-coupling inherent in the SV dynamics. This model overcomes the inability of traditional simplified models to accurately capture aerodynamic uncertainties and external disturbances. Next, to resolve the sluggish response of conventional control strategies to rapidly changing commands, this paper designs virtual control commands and leverages the future state prediction capability of MPC [33,34,35] to enhance the neural network, effectively reducing latency and transient errors in real-time tracking. Furthermore, to address the limitations of fixed-gain control in adapting to stochastic disturbances and parameter variations, the powerful approximation capability of neural networks (NNs) is utilized to optimize control gains in real time, generating precise rudder deflection inputs. This approach breaks through the robustness bottleneck of traditional methods in variable environments. The joint optimization mechanism, leveraging prediction to manage the complexity of dynamic planning and network training to enable real-time adaptive adjustments, significantly enhances tracking accuracy and convergence speed while ensuring the stability and reliability of the control system in highly dynamic missions. Comprehensive simulation and theoretical validation results demonstrate that this method holds significant value for both theoretical research and engineering applications, offering a novel approach to the field of supersonic or hypersonic vehicle control. The main contributions of this paper are as follows:
(1) Compared with existing studies, the model constructed in this work fully accounts for the strong cross-coupling characteristics and disturbance effects of SVs during flight and transforms the complex nonlinear interactions into a novel problem formulation.
(2) A novel hierarchical NN-MPC control method is proposed, which addresses the impact of high uncertainty and complex disturbance variations on the stability of the control system for the SV. This is achieved by integrating future dynamic intelligent prediction and real-time gain adjustment to adapt to drastic changes in control signals and disturbances.
(3) Benefiting from the hierarchical optimization structure, this method effectively achieves dynamic dual-layer prediction and optimization for complex cascades, enabling the SV to meet the dynamic optimization requirements for acceleration and angular rate command tracking in complex disturbance scenarios.
(4) The stability of the designed closed-loop system is analyzed using Lyapunov’s theorem, and stability conditions are derived. Comprehensive simulation results demonstrate that, compared with existing advanced control methods, the proposed control method effectively enhances performance and robustness, capable of coping with the effects of disturbance variations.
The remainder of this paper is organized as follows: Section 2 provides a detailed problem formulation for the controller design, along with the complete mathematical establishment of the control problem. In Section 3, a novel NN-MPC-based controller design scheme is proposed. The stability of the designed closed-loop control system is rigorously proven in Section 4. Simulation results and their analysis are presented in Section 5, and conclusions are summarized in Section 6.
2. Problem Formulation
In this section, a dynamic model is first established to encapsulate the strong cross-coupling effects and random disturbances inherent in the SV. Building upon this foundation, an acceleration command tracking error model is developed. Finally, by integrating these models, a detailed description of the SV command tracking control problem and the corresponding control model is provided.
2.1. Description of the SV Dynamics Problem
Although SVs undergo complex aerodynamic interactions during flight, making it difficult to maintain a constant spin rate in a short period [36], the roll motion of SVs is primarily governed by the tail structure and spin stabilization mechanism when designing the acceleration controller. The variations in roll angular velocity typically have a limited impact on the acceleration response within short control cycles. Therefore, it is reasonable to assume that the dynamic effects of the roll channel have a minor influence on acceleration control. In this paper, the second-order dynamic effects of the roll channel are reasonably simplified. The dynamic parameters of the SV are presented [29] in Figure 1, based on which the following dynamic model is established:
where represents the commanded normal acceleration, denotes the commanded lateral acceleration, indicates the commanded velocity, and signifies the gravitational acceleration. Additionally, represent the commanded pitch and yaw angles; while denote the commanded flight path angle and heading angle, respectively; and indicates the commanded roll angle. The parameter represents the coefficient associated with the control moment constraints, while denote the coefficients related to the moment constraints in the non-spinning coordinate system. Furthermore, , where the parameters A and C denote the lateral moment of inertia and longitudinal moment of inertia of the SV, and represent the initial conditions for the lift acceleration, Magnus force, static moment, Magnus moment, roll rate, and damping moment, respectively. The deep coupling rate and phase coupling coefficient matrices are denoted by , which represent the initial conditions of the system. In the non-spinning coordinate system , the velocity coordinate system is , and the body-fixed coordinate system is . The expressions for these parameters are also available in Refs. [29,35].
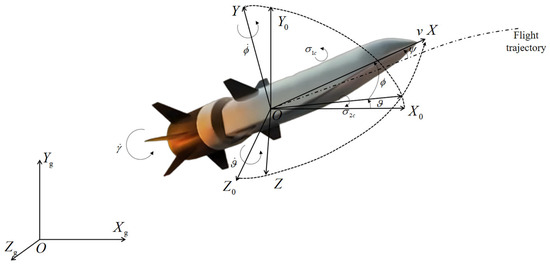
Figure 1.
The SV dynamic parameters and reference coordinates.
It is evident from the dynamics model described above that the pitch and yaw dynamics of the SV are mutually coupled. To facilitate the discretization of the dynamics model, the following simplifications are applied:
One can deduce
where
The disturbances and in Equations (2) and (3) arise from cross-coupling effects, variations in aerodynamic parameters, and external forces. To mitigate these effects, we introduce a bounded uncertainty set for the model , where denotes the number of bounded uncertainty conditions. Each model corresponds to specific dynamic conditions. The model transition rate is determined using the Markovian probability transition condition, defined as , where and . This indicates that the initial dynamic model follows a Markovian process. Thus, for . To address the challenges posed by the initial dynamics in predictive control and achieve high-precision control, the following simplifications are applied:
2.2. Control Problem and Model Description
Considering that the solutions to Equations (2) and (3) exhibit uniqueness and stability, the following reasonable assumptions are proposed.
Assumption 1.
Let the online convex function
and
be a strongly convex function, all satisfying the Lipschitz condition. Specifically, there exist constants
such that for all , the following holds
Assumption 2.
and
are differentiable with respect to time in the continuous domain, and their discrete-time derivatives are bounded. There exists the positive constant
such that
To achieve more precise tracking of acceleration commands, we developed a dual-layer controller structure based on the established dynamic model. Accordingly, the designed control law is expressed as follows:
where represents a time-varying gain matrix optimized online, with its values derived from the subsequent NN-MPC method. The simplified dynamic equation is accordingly transformed as follows:
Consequently, the state vector can be defined as follows.
From this, we derive that the unified system dynamics is expressed as
The comprehensive architecture of the controller is illustrated in Figure 2. The primary objective of the developed controller is to guarantee precise tracking of the reference trajectory by the acceleration state. Within the scope of this study, the reference trajectory is presumed to be supplied by the guidance system and is characterized as both bound and continuously differentiable. We define the tracking errors as the difference between the actual value and the reference value, expressed as
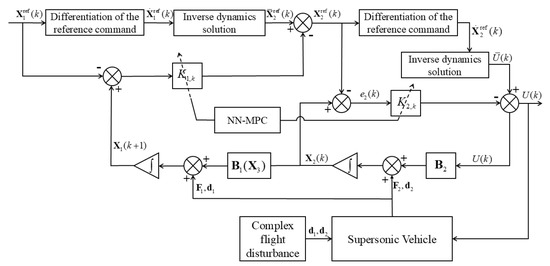
Figure 2.
The comprehensive architecture of the controller.
In Equation (15), the reference angular rate is obtained by inversely solving the acceleration dynamics as follows:
where denotes the derivative of the reference acceleration and is assumed to be sufficiently smooth. By transforming Equation (15) and substituting it into Equation (14), the following expression is obtained:
After transforming the above equation, we get
By incorporating Equation (9), the angular rate error dynamics can be derived as follows:
In conclusion, the primary control goal of this paper is to account for the discrete-time nonlinear dynamics of SV, as described by Equations (10) and (11), under the assumption that the functions and adhere to the Lipschitz continuity condition and the disturbances are both differentiable and bounded. The aim is to develop a control law , where determined by Equation (16), such that the acceleration error, as defined in Equation (14), converges to .
3. Dual-Layer Control Method Based on NN-MPC
This section focuses on introducing a novel NN-MPC method designed to optimize the acceleration tracking performance of the SV, enabling robust tracking of the reference trajectory under nonlinear cross-coupling and complex stochastic disturbances. By optimizing the time-varying feedback gain matrix online and leveraging the approximation capabilities of neural networks in conjunction with predictive techniques, adaptive and stable control is achieved. Initially, we establish the conditions for the nonlinear system to ensure the feasibility of the proposed method.
Lemma 1.
Suppose there exist a gain sequence and a constant such that Assumption 1 holds for all , and the expected values of the disturbances and satisfy . Then, there exists a constant such that the acceleration and angular rate errors satisfy
Under the control law (9), the SV achieves acceleration tracking such that .
Proof of Lemma 1.
The acceleration error dynamics are given by Equation (18). From the Lipschitz condition, there exists such that
Setting , where , we obtain
Taking the expectation of Equation (23) and considering , it follows that
The upper bound of the norm of the above expression is represented as
Similarly, the angular rate error dynamics are derived from Equation (19).
Setting and and assuming ensures the closed-loop stability of the system, we have
Likewise, the upper bound of the norm of the expectation function of the above expression is given by
When there exists such that and is bounded, then exhibits exponential convergence. Thus, there exists , and with , we obtain
where denotes the time step index. Given sufficiently small and , it follows that .□
Lemma 1 states that if a suitable sequence can be identified during the solution process such that the angular rate error converges rapidly, then the acceleration error approaches zero under the condition of zero-mean disturbances. However, in existing research, determining such a gain sequence in nonlinear stochastic systems remains challenging. Consequently, in the following subsection, we propose a NN-MPC framework that leverages predictive optimization to identify the most appropriate gain sequence.
3.1. Control Framework
To optimize tracking performance, we define distinct instantaneous and predictive cost functions for each layer of the dual-layer structure. For the acceleration layer, the instantaneous cost function and predictive cost function are expressed as
For the angular rate layer, the instantaneous cost function and predictive cost function are given by
The objective of the MPC is to determine the gain that minimizes the predictive costs of both layers, such that the optimal feedback gains satisfy
In the prediction phase, the future prediction errors for the acceleration and angular rate layers within the proposed dual-layer control structure are represented as
Remark 1.
The algorithm in this study employs a receding horizon optimization strategy, where the prediction errors for the acceleration and angular rate layers are computed iteratively via recursive equations. The non-convexity and stochasticity of the cost functions and result in slow convergence when using traditional optimization methods, while the interlayer coupling further exacerbates the complexity due to increased dimensionality. To address these challenges, the proposed approach leverages the approximation capabilities of neural networks, achieving efficient optimization through online training. The details of this scheme are elaborated in the following sections.
3.2. Neural Network Optimization
Neural networks can handle the complex nonlinear mapping between approximate functions and gains, a capability attributed to the universal approximation theorem [37]. Consequently, we employ neural networks to approximate the mapping relationship between the cost functions and the feedback gain matrix in this study. Given the short flight duration of the SV, overly complex neural networks would result in computational delays incompatible with real-world application scenarios. To achieve the optimization objectives, we design two shallow feedforward neural networks to approximate and , each comprising an input layer, a single hidden layer, and an output layer.
For optimization purposes, the input to the acceleration layer is defined as , and the input to the angular rate layer is defined as . The hidden layer consists of neurons, with the activation function denoted as . The signal generated by the hidden layer can be expressed as
where represents the weight matrix, which is updated during the offline phase by minimizing using training data and an optimizer, and the online phase, which is fine-tuned through backpropagation based on real-time tracking errors. is the bias vector, and denotes the sigmoid function, ensuring smoothness and boundedness of the nonlinear transformation. The cost estimate output of a single neuron is given by
where is the output weight vector and is a scalar bias, ,
The optimization process of the neural network is divided into three stages: data generation, network training, and gain optimization. First, we define the training dataset as , where represents the historical window length, and is estimated via Monte Carlo sampling:
where is the number of samples, denotes the -th sample set, and corresponds to the associated sequence.
Next, the loss function is defined as the mean squared error , and the network is trained using the Adam optimizer as follows
where represents the network parameter set, is the learning rate, and is the number of iteration steps. Upon completion of network training, the optimal gains are searched within the training results and fed back into the dual-layer control structure to verify compliance with the optimality conditions.
3.3. Algorithm Implementation Procedure
The core concept of the proposed algorithm in this study is to design a compact dual-layer controller structure that adheres to the dynamic characteristics of the SV. This is achieved by training two sets of neural networks online to approximate the predictive cost functions and for the acceleration and angular rate layers, respectively, thereby enabling real-time optimization of the feedback gains and . Ultimately, this process generates the optimal virtual angular rate and the actual control input . Algorithm 1 provides the pseudocode of the proposed method implementation. Initially, the system is configured with an initial state , an initial disturbance pattern , and initial gains and , and the datasets and are initialized as empty sets. At each time step , the acceleration layer error is computed, and a set of errors over the next steps is derived based on the predictive model. Following this prediction, the dataset is updated, and the neural network for the acceleration layer is trained. Within the neural network, the parameters are updated by minimizing the loss function using the Adam optimizer, ensuring convergence to a minimal value. Upon completion of training, a search is conducted within the constraint set to determine , followed by the computation of . The algorithm then transitions to the angular rate layer, which operates under a mechanism like that of the acceleration layer. After obtaining from the angular rate layer neural network, the control input is calculated, and the state is updated. In the algorithm designed herein, the total computational time for neural network training and search remains below the system sampling period . To address the complex disturbances present in the system, the algorithm employs Monte Carlo samplings to estimate the true expectation of the disturbances with high fidelity.
| Algorithm 1. Pseudo-code for the execution of the proposed method | |
| 1: | Input: |
| 2: | Output: , , |
| 3: | Initialize parameter , , , , , . Configure the algorithm parameters , etc. |
| 4: | For do |
| 5: | Acceleration subsystem |
| 6: | Calculate the acceleration error using Equation (14) |
| 7: | For do |
| 8: | Generate perturbation paths based on the transition probability , and compute using Equation (18) |
| 9: | Estimate the predicted cost through Equations (37)–(39) |
| 10: | Update the acceleration layer dataset |
| 11: | Optimize the gain using Equations (37)–(42), and generate the angular velocity virtual control quantity |
| 12: | repeat |
| 13: | Update the gain matrix of the acceleration subsystem in Step 11 |
| 14: | until optimality is achieved |
| 15: | End for |
| 16: | Angular velocity subsystem |
| 17: | Calculate the acceleration error using Equation (15) |
| 18: | For do |
| 19: | Generate perturbation paths based on the transition probability and compute using Equation (19) |
| 20: | Estimate the predicted cost through Equations (37)–(39) |
| 21: | Update the acceleration layer dataset |
| 22: | Optimize the gain using Equations (37)–(42) |
| 23: | |
| 24: | repeat |
| 25: | Update the gain matrix of the acceleration subsystem in step 22 |
| 26: | until optimality is achieved |
| 27: | End for |
| 28: | Update the system state using Equations (10)–(11) |
| 29: | End for |
Remark 2.
The stability of the algorithm hinges on the approximation accuracy and the selection of gains. If the errors of and are bounded, and ensures that the eigenvalues of the closed-loop system are appropriately configured, then the system is stable.
4. Stability Analysis
In this section, we analyze the stability of the disturbances and the overall closed-loop control system in the control system of the SV based on the NN-MPC method.
Theorem 1.
For the overall control system of the SV based on NN-MPC, there exist positive constants and such that the expected norm of the acceleration tracking error satisfies
where
denotes the Lipschitz constant of the acceleration subsystem and
represents the closed-loop decay rate of the angular rate subsystem,
,
. If
is satisfied, then
converges to a finite value as
, ensuring that the system remains stable under the influence of disturbances.
Proof of Theorem 1.
By introducing the previously defined acceleration error (14) and angular rate error (15), the nominal condition can be derived from the dynamics equation of the acceleration layer as follows:
From Equations (23)–(27) in the proof of Lemma 1, the upper bound expressions for the expected norms of the acceleration and angular rate errors are obtained. Next, by recursively expanding the expected acceleration error and assuming to be approximately constant, we get
After iterations, we can write
Substituting the expected angular rate error into the above expression yields
From , we can obtain that
The norm is expressed as
Considering the disturbance term based on Assumption 2, we obtain
Consequently, we get
where
In summary, this result is expressed as
Thus, when , converges to a finite value with , indicating that the system remains stable under the influence of disturbances.□
Theorem 2.
For the integrated control system of the SV based on NN-MPC, if the feedback gains and , optimized by the neural network, satisfy and , then the overall closed-loop system is asymptotically stable. Furthermore, the expected norm of the acceleration tracking error satisfies
where represents the closed-loop decay rate, , .
Proof of Theorem 2.
Define the integrated state and the reference state . The state error is expressed as , where ,
By combining the error dynamics of the acceleration subsystem (Equation (23)) and the angular rate subsystem (Equation (26)), the integrated closed-loop system expression is derived as
where , .
First, the local stability of the closed-loop system (without disturbance influence) is proven using eigenvalue analysis. In the above expression, the closed-loop matrix is a lower triangular matrix, with its eigenvalues being the union of the eigenvalue sets of the two submatrices, as follows
In the acceleration subsystem, the eigenvalue of satisfies , and the eigenvalue is . By applying the Gerschgorin theorem, it follows that
From , and can be derived, which contradicts the actual . Therefore, is introduced to stabilize the acceleration subsystem.
In the angular rate subsystem, the eigenvalue of the satisfies , with the eigenvalue expressed as
We assume , such that
Deriving the above expression yields
Thus, the angular rate subsystem optimizes via NN-MPC, resulting in .
In summary, the eigenvalues of the closed-loop system can be expressed as
When , the system is locally asymptotically stable.□
5. Experimental Results and Analysis
In this section, we evaluate the optimality and effectiveness of the proposed method. The experiments in this section are conducted using the SV under study as the test subject. First, numerical simulations are performed to validate the performance of the proposed method. Subsequently, two existing methods are introduced for comparison. The specific parameters of the SV studied in this paper are presented in Table 1. The reference states, constraint ranges, and initial conditions used in the simulations are provided in Table 2.

Table 1.
The specific parameters of SV.
Table 2.
The reference states, constraint ranges, and initial conditions used in the simulations.
5.1. Performance Evaluation of the Proposed Method
The parameters pertinent to the controller proposed in this study are given in Table 3. To ensure that the simulation fully reflects the characteristics of the dynamic system, we selected a sampling time of based on the frequency characteristics indicated by the SV’s aerodynamic parameters, thereby guaranteeing that the dynamic system remains undistorted. To ensure that the simulation closely aligns with real-world scenarios, harmonic signals were employed to emulate the aerodynamic fluctuations induced by the rotational characteristics of the SV, with . Based on practical engineering experience, the aerodynamic torque and torque coefficient in the simulation varied by 20% of their nominal values to test the controller’s boundary limits, thereby reflecting system uncertainties encountered in actual flight conditions. The simulation results encompass the acceleration response curve, angular rate response curve, rudder deflection angle response curve, variation curve of the dual-layer predictive cost function, and iterative curve of the gain matrix.
Table 3.
The pertinent parameters of the proposed controller.
The simulation results are presented in Figure 3a–h and Figure 4a–h. Figure 3 illustrates the control results of SV when the aerodynamic torque and torque coefficient are varied by −20% of their nominal values. Specifically, Figure 3a,b depict the tracking performance of the normal acceleration and lateral acceleration . It can be observed from these figure that and can rapidly and accurately track their respective reference signals and , achieving stable tracking of the reference commands within approximately 1.5 s and 0.2 s, with no significant overshoot throughout the process. This indicates that the designed controller exhibits robust dynamic response capabilities in the presence of initial deviations, effectively mitigating the effects of cross-channel coupling in the SV. Figure 3c,d present the tracking performance of the controller with respect to the pitch angular rate and yaw angular rate . Owing to the structure of the designed controller, the generated angular rate reference signals exhibit no significant abrupt changes, which is advantageous for reducing control energy consumption in real flight experiments. It is evident from these figures that and can rapidly follow their reference signals and , with the overall tracking error of the pitch angular rate being suppressed to near-zero levels within 0.03 s, while demonstrates a smoother response, maintaining the tracking error within a small range throughout. Notably, although exhibits a spike in the initial phase, it does not significantly impact system stability. This can be attributed to the designed controller’s ability to effectively handle rapidly changing angular rate commands through online learning and real-time adjustment of the gain matrix, thereby achieving fast and precise angular rate tracking. Figure 3e,f present the output results of the controller in terms of rudder deflection angles for the pitch and yaw channels. Although the deflection angles for the pitch channel and yaw channel are constrained within a saturation limit of ±15° throughout the simulation, it is evident from these figures that the amplitude variations of the rudder deflection outputs remain within 1.5°, with the variation curves exhibiting smoothness and no noticeable chattering. This control performance significantly reduces control effort for the SV during actual flight. The zoomed-in sections of these figures reveal that within the first 0.3 s, the deflection angles of both channels can rapidly adjust to respond to changes in acceleration commands, subsequently stabilizing into a steady state. Furthermore, the smooth variation of the deflection angles further validates that the dual-layer controller based on NN-MPC maintains the smoothness and stability of control inputs even under multiple disturbances. Figure 3g,h illustrate the performance of the predictive cost functions and , which directly reflect the controller’s overall tracking error and its capability to handle complex disturbances. Initial spikes or fluctuations during control lead to a temporary increase in the cost functions; however, the controller mitigates these disturbances by minimizing the cost to rapidly adjusting the control inputs accordingly. As observed from these figures, the designed controller proactively addresses complex disturbances, achieving convergence of and to zero within 200 optimization steps.
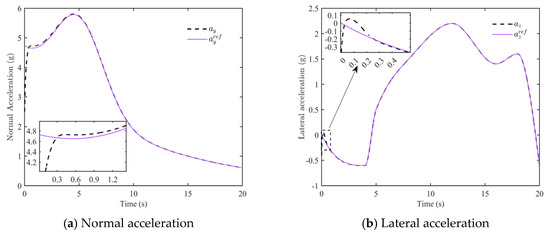
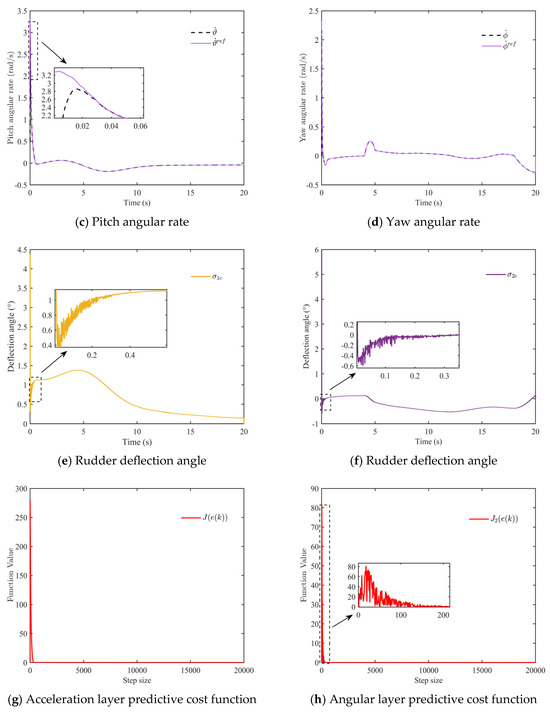
Figure 3.
The proposed method performance when aerodynamic parameters are varied by −20%.
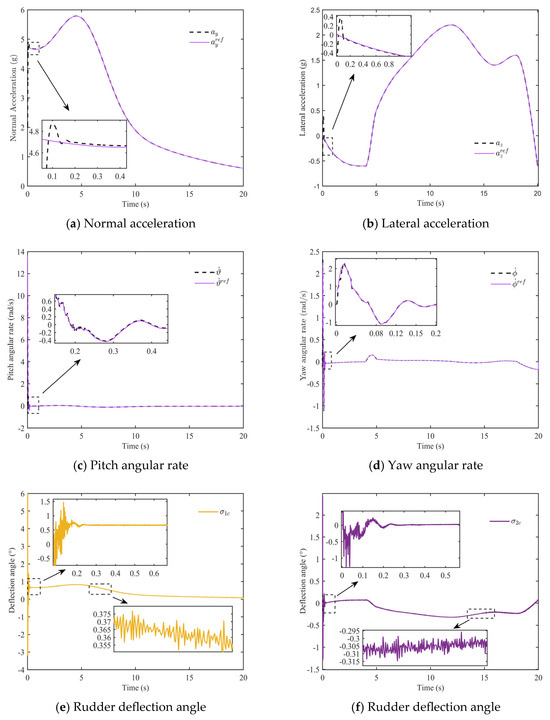
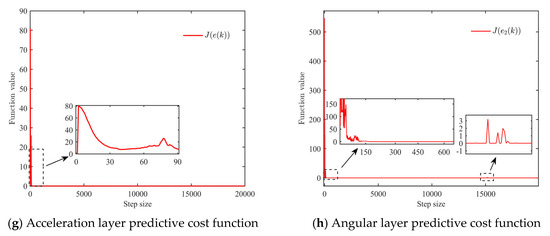
Figure 4.
The proposed method performance when aerodynamic parameters are varied by +20%.
Figure 4 illustrates the control results of SV when the aerodynamic torque and torque coefficients are increased by +20% of their nominal values. The exhibits significant fluctuations at 0.1 s but rapidly decreases thereafter, converging to within 0.2 s. Similarly, the shows a minor peak at 0.1 s and converges to within 0.15 s, with an overall small tracking error, as shown in Figure 4a,b. The experiences slight fluctuations within the first 0.2 s, with values ranging between −0.2 and 0.5 rad/s, but the response accurately tracks the reference. Meanwhile, exhibits a spike at 0.04 s, but can achieve precise tracking, as depicted in Figure 4c,d. The output by the controller adjusts rapidly during the initial phase (0–0.2 s), with fluctuation amplitudes within 1.5°, and stabilizes by 0.25 s. In the subsequent output, a minor jitter of approximately 0.01° is observed, which is attributed to the simulation accounting for real flight scenarios, and such jitter does not impact the control performance in practice. Similarly, the responds quickly within 0.15 s and subsequently stabilizes, as shown in Figure 4e,f. Figure 4g,h present the variations of the predictive cost functions. Compared to the case where the aerodynamic torque and torque coefficients are reduced by −20%, the variations in and are smaller, with comparable convergence rates. Around 15,000 steps, exhibits minor fluctuations (ranging from 0 to 3) but quickly stabilizes near zero. This further demonstrates that the proposed controller effectively suppresses errors by optimizing the cost function in the presence of random complex disturbances, thereby maintaining the system’s robustness and stability.
To further demonstrate the robustness of the proposed algorithm, we conducted a Monte Carlo simulation consisting of 1000 sample runs. The simulation conditions were set as follows: (1) The aerodynamic coefficients are assumed to vary randomly between −20% and +20% of their respective nominal values, following a normal distribution. (2) The SV mass , lateral moments of inertia , and longitudinal moments of inertia , and air density all vary randomly between −5% to +5%, subject to the normal distribution. (3) The initial parameters of the gain matrix are randomly assigned.
Figure 5 presents the Monte Carlo simulation results for the tracking of acceleration and angular rate commands. To provide a more intuitive evaluation of the proposed method’s performance, the following metrics are established: (1) Mean Tracking Error (MTE): the average absolute value of the command tracking error recorded during the simulation; (2) Disturbance Rejection Ratio (DRR): a measure of the method’s ability to suppress disturbances, quantified as the ratio of tracking error to disturbance amplitude; (3) Convergence Time (CT): the time at which the tracking error first reaches within ±0.1. In each subplot, the left side depicts the Monte Carlo simulation results, while the right side shows the corresponding cumulative distribution. Table 4 summarizes the statistical outcomes of the Monte Carlo simulations.
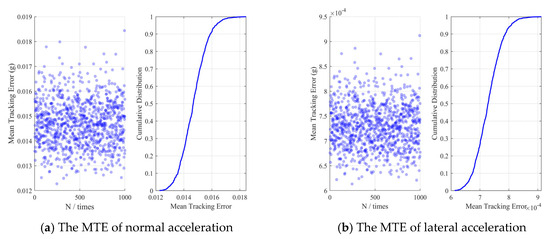
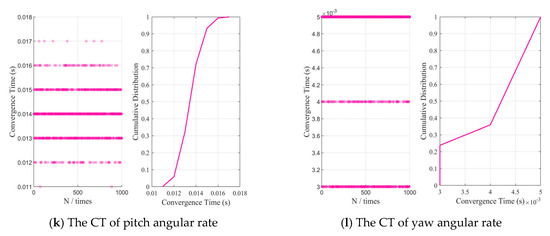
Figure 5.
The Monte Carlo simulation results for the tracking of acceleration and angular rate commands.
Table 4.
The parameter values for the two comparative algorithms.
From Figure 5a–d, the command error means for , , , and are observed to be distributed with approximately 95% of the values around 0.015, 0.0007, 0.0012, and 0.0005, respectively. Similarly, Figure 5e–h demonstrate the algorithm’s exceptional disturbance suppression capability, with suppression rates for , , , and distributed around 0.1, 0.956, 0.86, and 0.944, respectively. Figure 5i–l indicate rapid convergence of , , , and to the reference commands, with convergence times of 0.2, 0.026, 0.015, and 0.004 s, respectively. These Monte Carlo simulation results further validate the robustness of the proposed design method in addressing multiple disturbances.
5.2. Performance Comparison
To comprehensively evaluate the superiority of the control method proposed in this study for the SV over existing approaches, this section first compares it with the adaptive sliding mode control method (Existing Scheme I). Additionally, given the similarity between the dual-layer structure of the proposed algorithm and TLC, a TLC method based on ISMC-ESO (Existing Scheme II) is introduced for comparison to thoroughly demonstrate the algorithm’s performance. To ensure fairness in the comparison, the values of identical parameters across the selected methods are set to be the same. Since Existing Schemes I and II require continuous parameter tuning, their algorithm-specific parameters are first optimized before conducting simulation validation, while keeping other initial conditions and simulation parameters unchanged. The aerodynamic torque and torque coefficients are varied by +20% of their nominal values. The parameter values for the two comparative algorithms are presented in Table 4.
Figure 6 presents the simulation results of Existing Scheme I. The approaches the reference command within 1.5 s and subsequently converges to within 3 s. Compared to the proposed method, the SMC method exhibits a slightly slower response speed in the initial phase, with a longer time required for the tracking error to converge to zero. Similarly, while converges faster than , it still displays a larger initial deviation during the convergence process compared to the proposed method, indicating that the SMC method is less effective in suppressing initial disturbances and cross-channel coupling, as shown in Figure 6a,b. Figure 6c,d illustrate the tracking performance of and based on the SMC method. Compared to the proposed method, exhibits larger fluctuations in the initial phase and a slightly slower convergence speed. generated by Existing Scheme I undergoes a steep variation between 4 and 5 s, which affects the smoothness of the subsequent rudder deflection signal output and introduces minor fluctuations in the overall output. Compared to the proposed method, Existing Scheme I demonstrates more pronounced initial disturbances and slower convergence in tracking the yaw angular rate, suggesting that its dynamic response capability in handling rapidly changing commands and disturbances is inferior to that of the proposed method.
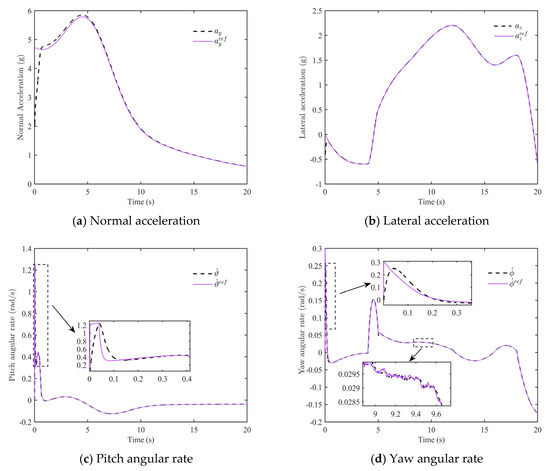
Figure 6.
The simulation results of Existing Scheme I.
Figure 7 presents the simulation results of Existing Scheme II. From Figure 7a,b, it can be observed that fluctuates between 4.6 g and 5.8 g during the initial phase (0–1.6 s), approaching within 2 s, after which the control stabilizes. fluctuates between −0.2 and 0.1 g during the initial phase (0–0.3 s), converging to and subsequently stabilizing. Compared to the proposed method, Existing Scheme II exhibits slightly larger fluctuations in normal and lateral accelerations during the initial phase, with a slower convergence rate. However, compared to Existing Scheme I, its initial response is faster, and the fluctuations are more manageable, indicating that the ISMC-ESO-TLC method outperforms SMC in suppressing initial disturbances and cross-channel coupling, though it is slightly inferior to the dual-layer control method based on NN-MPC. Figure 7c,d illustrate the tracking performance of and . Due to the algorithm’s use of ESO to handle complex disturbances, and exhibit sinusoidal fluctuations. fluctuates between −0.8 and −0.2 rad/s during the initial phase (0–0.5 s) and converges to within 0.6 s, achieving rapid convergence. experiences fluctuations during the initial phase (0–0.5 s) and converges to within 1 s. As observed from the zoomed-in section of Figure 7d, compared to , the quickly exhibits signal fluctuations with an amplitude of 0.05 rad/s. Although this fluctuation appears small, it significantly impacts the rudder deflection signal output, leading to increased jitter in the rudder deflection. Compared to the proposed method, Existing Scheme II shows greater deviation and chattering in the yaw angular rate during the initial phase. In contrast to the SMC method, its initial response is faster, but the chattering is more pronounced, suggesting that the dynamic response capability of the TLC method based on the ISMC-ESO method in handling rapidly changing commands and disturbances lies between the two approaches.
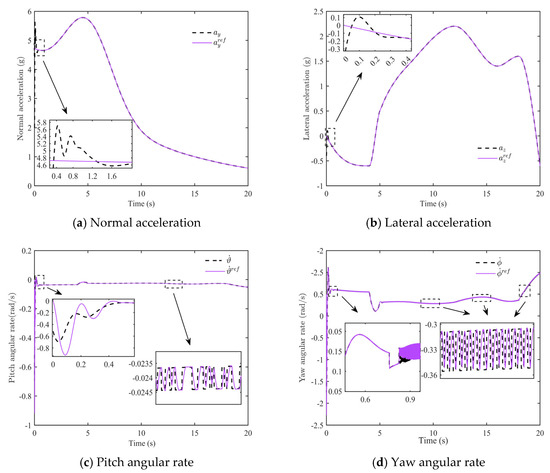
Figure 7.
The simulation results of Existing Scheme II.
The tracking error comparison of the acceleration and angular rate subsystems for different methods in this experiment is presented in Figure 8. The figure displays the tracking error curves for Existing Scheme I, Existing Scheme II, and the proposed method under a +20% variation in aerodynamic torque and torque coefficients. From the transient results, it is evident that Existing Schemes I and II exhibit more oscillatory curves and slower convergence times compared to the algorithm proposed in this paper. From the overall steady-state results, it can be observed that, compared to Existing Schemes I and II, the tracking error of the dual-layer controller based on NN-MPC is confined within a smaller boundary and remains within a small neighborhood of zero. Additionally, Existing Schemes I and II achieve better performance only after extensive parameter tuning, whereas the proposed algorithm attains optimal performance through an online adaptive method, despite requiring a small amount of convergence time for initial weight adaptation. In summary, compared to the Existing Schemes I and II, the proposed method demonstrates superior accuracy and disturbance rejection capability under complex multimodal disturbances.
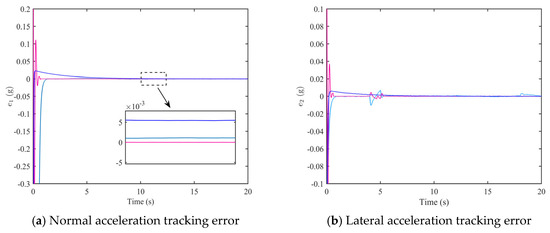
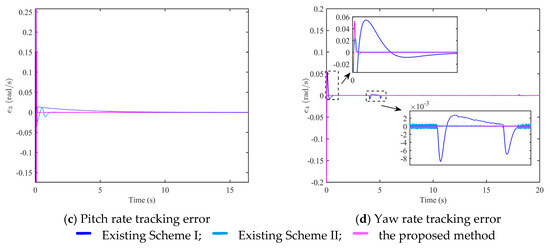
Figure 8.
Comparison of tracking errors among different methods.
6. Concluding Remarks
This paper presents a framework based on NN-MPC designed to achieve acceleration command tracking for SV in complex and highly dynamic flight environments. The proposed approach overcomes the limitations of traditional control methods in addressing nonlinear dynamics, stochastic disturbances, and real-time adaptability. A comprehensive mathematical model is established by thoroughly characterizing the dynamic behavior of the SV, which resolves the shortcomings of traditional simplified models that fail to adequately represent real flight dynamics. Building upon this model, the framework tackles the sluggish response of conventional control methods to rapidly changing commands by employing the intelligent prediction of future states to generate virtual control commands. Furthermore, to address the inadequacy of fixed-parameter control in adapting to stochastic disturbances and parameter variations, neural networks are integrated into the framework. Leveraging the online learning capabilities of neural networks, the approach mitigates the bottleneck of insufficient robustness in control systems under varying environmental conditions. The final simulation results demonstrate that the proposed NN-MPC-based dual-layer control method delivers exceptional tracking performance under conditions of parameter uncertainty, external disturbances, and dynamic command variations. This method significantly enhances the acceleration tracking capabilities of SV, offering an advanced solution for the deployment of existing controllable vehicles in highly dynamic mission scenarios.
In the future, low-cost supersonic vehicles are expected to enable multi-vehicle coordinated operations. Owing to the intelligent nature of the proposed method, it holds potential for application in control research on collaborative missiles, providing a cutting-edge theoretical foundation for the coordinated control of the SVs. This aspect will be further explored in our future work.
Author Contributions
Conceptualization, Z.Y.; methodology, Z.Y. and C.M.; software, Z.Y., H.W. and T.P.; validation, Z.Y. and C.M.; formal analysis, Z.Y., H.W. and T.P.; investigation, Z.Y., H.W. and T.P.; resources, C.M., H.W. and T.P.; data curation, Z.Y. and C.M.; writing—original draft preparation, Z.Y.; writing—review and editing, C.M.; visualization, Z.Y.; supervision, C.M.; project administration, C.M.; funding acquisition, C.M. All authors have read and agreed to the published version of the manuscript.
Funding
The authors would like to acknowledge National Natural Science Foundation of China (Grant No. 52002185) and Special Fund for Basic Scientific Research Business of Central Universities (Approval No.: 30925010705) to provide funds for conducting experiments.
Data Availability Statement
The data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| NN-MPC | Neural Network Model Predictive Control |
| SV | Supersonic Vehicle |
| SMC | Sliding Mode Controllers |
| MARC | Model Adaptive Reference Control |
| MPC | Model Predictive Control |
| DSC | Dynamic Surface Control |
| TLC | Trajectory Linearization Control |
| ISMC | Improved Sliding Mode Control |
| ESO | Extended State Observer |
| PID | Proportional Integral Derivative |
| NN | Neural Networks |
| MTE | Mean Tracking Error |
| DRR | Disturbance Rejection Ratio |
| CT | Convergence Time |
References
- Xu, Q.; Chang, S.; Wang, Z. Acceleration autopilot design for gliding guided projectiles with less measurement information. Aerosp. Sci. Technol. 2018, 77, 256–264. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, Z.; Zhu, Y. Acceleration autopilot for a guided spinning rocket via adaptive output feedback. Aerosp. Sci. Technol. 2018, 77, 573–584. [Google Scholar] [CrossRef]
- Xu, Q.P.; Chang, S.J.; Wang, Z.Y. Composite-Efficiency-Factor-Based Trajectory Optimization for Gliding Guided Projectiles. J. Spacecr. Rocket. 2018, 55, 66–76. [Google Scholar] [CrossRef]
- Shi, Z.; Zhao, L.; Liu, Z. Variational method based robust adaptive control for a guided spinning rocket. Chin. J. Aeronaut. 2021, 34, 164–175. [Google Scholar] [CrossRef]
- Zouaoui, S.; Elajrami, M.; Kouider, B. Easy Tracking of UAV Using PID Controller. Period. Polytech. Transp. Eng. 2019, 47, 171–177. [Google Scholar] [CrossRef]
- Mohamed, E.; Zouaoui, S.; Kouider, B. Drone Control using the Coupling of the PID Controller and Genetic Algorithm. Komunikacie 2021, 3, 75–82. [Google Scholar]
- Eltayeb, A.; Rahmat, M.; Basri, M.; Eltoum, M.; Mahmoud, M. Integral Adaptive Sliding Mode Control for Quadcopter UAV Under Variable Payload and Disturbance. IEEE Access 2022, 10, 94754–94764. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, J.Y.; Wang, X.M.; Jia, F.X. A guidance and control design with reduced information for a dual-spin stabilized projectile. Def. Technol. 2024, 33, 494–505. [Google Scholar] [CrossRef]
- Whitehead, B.; Bieniawski, S. Model Reference Adaptive Control of a Quadrotor UAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Tornoto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Nguyen, N. Model-Reference Adaptive Control; Advanced Textbooks in Control and Signal Processing; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Faulwasser, T.; Findeisen, R. Nonlinear Model Predictive Control for Constrained Output Path Following. IEEE Trans. Autom. Control 2016, 61, 1026–1039. [Google Scholar] [CrossRef]
- Hanover, D.; Foehn, P.; Sun, S.; Kaufmann, E.; Scaramuzza, D. Performance, Precision, and Payloads: Adaptive Nonlinear MPC for Quadrotors. IEEE Robot. Autom. Lett. 2022, 7, 690–697. [Google Scholar] [CrossRef]
- Zou, Y.; Zheng, Z. A Robust Adaptive RBFNN Augmenting Backstepping Control Approach for a Model-Scaled Helicopter. IEEE Trans. Control Syst. Technol. 2015, 23, 2344–2352. [Google Scholar] [CrossRef]
- Huang, J. Global Tracking Control of Strict-Feedback Systems Using Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 1714–1725. [Google Scholar] [CrossRef] [PubMed]
- Xu, Q.; Wang, Z.; Zhen, Z. Adaptive neural network finite time control for quadrotor UAV with unknown input saturation. Nonlinear Dyn. 2019, 98, 1973–1998. [Google Scholar] [CrossRef]
- Sun, C.Y.; Mu, C.X.; Yu, Y. Some control problems for near space hypersonic vehicles. Acta Autom. Sin. 2013, 39, 1901–1913. [Google Scholar] [CrossRef]
- Mu, C.X.; Zong, Q.; Tian, B.L.; Xu, W. Continuous sliding mode controller with disturbance observer for hypersonic vehicles. IEEE CAA J. Autom. Sin. 2015, 2, 45–55. [Google Scholar] [CrossRef]
- Chunodkar, A.; Akella, M. Switching angular velocity observer for rigid-body attitude stabilization and tracking control. J. Guid. Control Dyn. 2014, 37, 869–878. [Google Scholar] [CrossRef]
- Shen, Y.C.; Yu, J.Q.; Luo, G.C.; Ai, X.L.; Jia, Z.Y.; Chen, F.Z. Observer-based adaptive sliding mode backstepping output-feedback DSC for spin-stabilized rudder-controlled projectiles. Chin. J. Aeronaut. 2017, 30, 1115–1126. [Google Scholar] [CrossRef]
- Tang, P.; Zhang, F.; Ye, J.; Lin, D. An integral TSMC-based adaptive fault-tolerant control for quadrotor with external disturbances and parametric uncertainties. Aerosp. Sci. Technol. 2021, 109, 106415. [Google Scholar] [CrossRef]
- Tang, P.; Lin, D.; Zheng, D.; Fan, S.; Ye, J. Observer based finite-time fault tolerant quadrotor attitude control with actuator faults. Aerosp. Sci. Technol. 2020, 104, 105968. [Google Scholar] [CrossRef]
- Xu, W.; Qu, S.; Zhao, L.; Zhang, H. An improved adaptive sliding mode observer for middle-and high-speed rotor tracking. IEEE Trans. Power. Electron. 2020, 36, 1043–1053. [Google Scholar] [CrossRef]
- Liu, F.; Wang, S.Y.; Chao, T.; Yang, M. Adaptive saturated tracking control for solid launch vehicles in ascending based on differential inclusion stabilization. Def. Technol. 2023, 26, 157–179. [Google Scholar] [CrossRef]
- Yu, J.; Luo, G.; Mei, Y. Surface-to-air missile autopilot design using LQG/LTR gain scheduling method. Chin. J. Aeronaut. 2011, 24, 279–286. [Google Scholar] [CrossRef]
- Yan, X.Y.; Li, K.Y.; Yang, S.X. The control method of spinning missile based on dynamic inversion. J. Proj. Rocket. Missiles Guid. 2009, 29, 83–86. [Google Scholar]
- Liu, Y.; Zhu, J. Regular perturbation analysis for trajectory linearization control. In Proceedings of the American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 3053–3058. [Google Scholar]
- Xue, Y.L.; Jiang, C.S. Trajectory linearization control of an aerospace vehicle based on RBF neural network. J. Syst. Eng. Electron. 2008, 19, 799–805. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive course control based on trajectory linearization control for unmanned surface vehicle with unmodeled dynamics and input saturation. Neurocomputing 2019, 330, 1–10. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, X.G.; Yang, J.; Wang, Z.Y. Acceleration tracking control for a spinning glide guided projectile with multiple disturbances. Chin. J. Aeronaut. 2020, 33, 3405–3422. [Google Scholar] [CrossRef]
- Pane, Y.; Nageshrao, S.; Kober, J.; Babuska, R. Reinforcement learning based compensation methods for robot manipulators. Eng. Appl. Artif. Intell. 2019, 78, 236–247. [Google Scholar] [CrossRef]
- Kim, J.; Shim, H.; Yang, I. On improving the robustness of reinforcement learning-based controllers using disturbance observer. In Proceedings of the IEEE 58th conference on decision and control (CDC), Nice, France, 11–13 December 2019; pp. 847–852. [Google Scholar]
- Bakshi, N. Model Reference Adaptive Control of Quadrotor UAVs: A Neural Network Perspective. In Adaptive Robust Control Systems; IntechOpen: London, UK, 2018. [Google Scholar]
- He, N.; Ma, K.; Li, H.; Li, Y. Resilient Self-Triggered Model Predictive Control of Discrete-Time Nonlinear Cyberphysical Systems Against False Data Injection Attacks. IEEE Intell. Transp. Syst. Mag. 2024, 16, 23–36. [Google Scholar] [CrossRef]
- Yang, B.; He, F.; Yao, Y. MPC-based design of on-off control law of the attitude control thruster. In Proceedings of the 27th Chinese Control Conference, Kunming, China, 16–18 July 2008; pp. 539–543. [Google Scholar]
- Ollerenshaw, D.; Costello, M. Model Predictive Control of a Direct Fire Projectile Equipped with Rudders. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005. 5818. [Google Scholar]
- Li, K.; Yang, S.; Zhao, L. Stability of spinning missiles with an acceleration autopilot. J. Guid. Control Dyn. 2012, 35, 774–786. [Google Scholar] [CrossRef]
- Wang, P.X.; Rui, X.T.; Yu, H.L.; Wang, G.P.; Chen, D.Y. Adaptive control of track tension estimation using radial basis function neural network. Def. Technol. 2021, 17, 1423–1433. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).