
Transient Simulation of Aerodynamic Load Variations on Carrier-Based Aircraft During Recovery in Carrier Airwake


Abstract
1. Introduction
2. Numerical Method
2.1. DDES Numerical Method
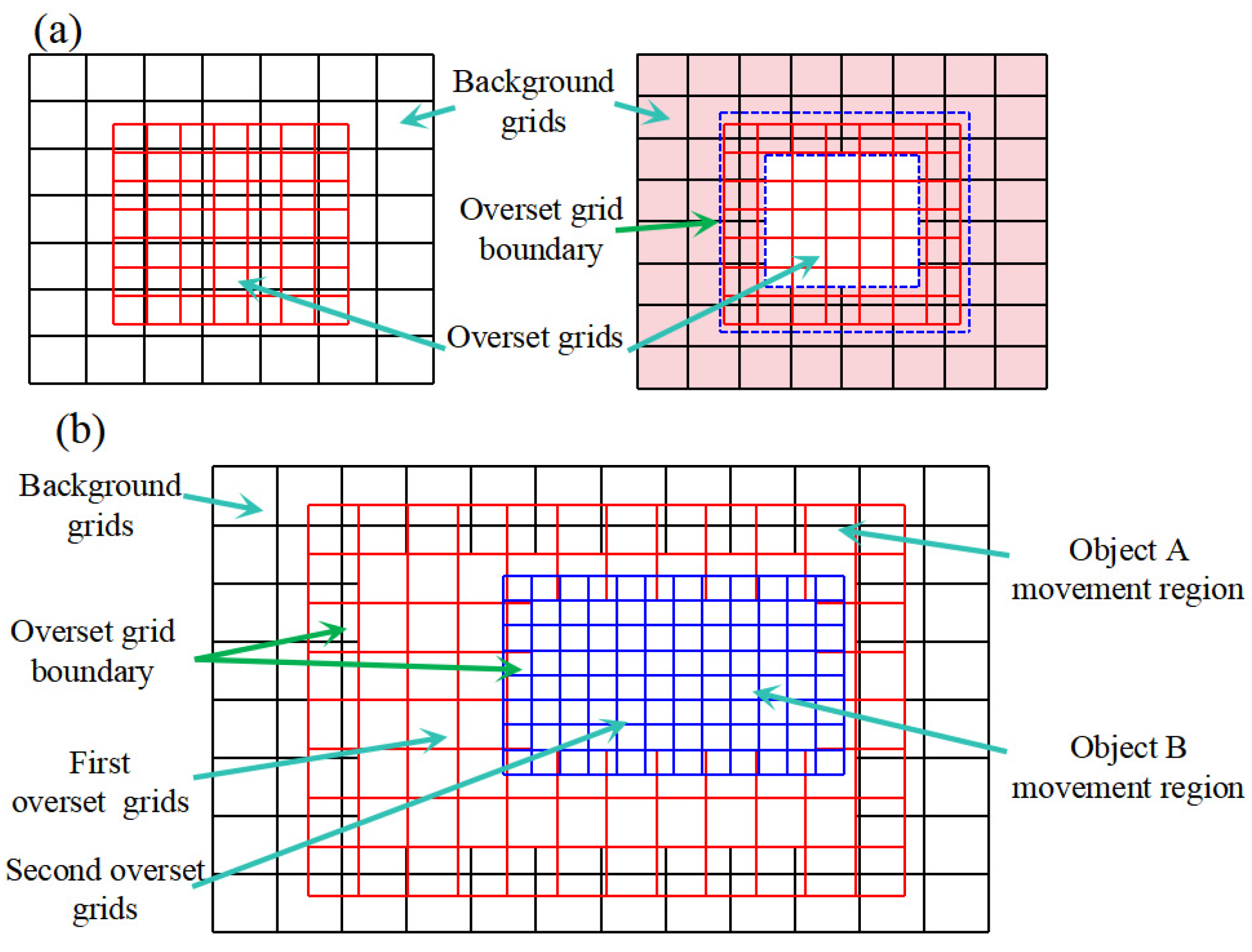
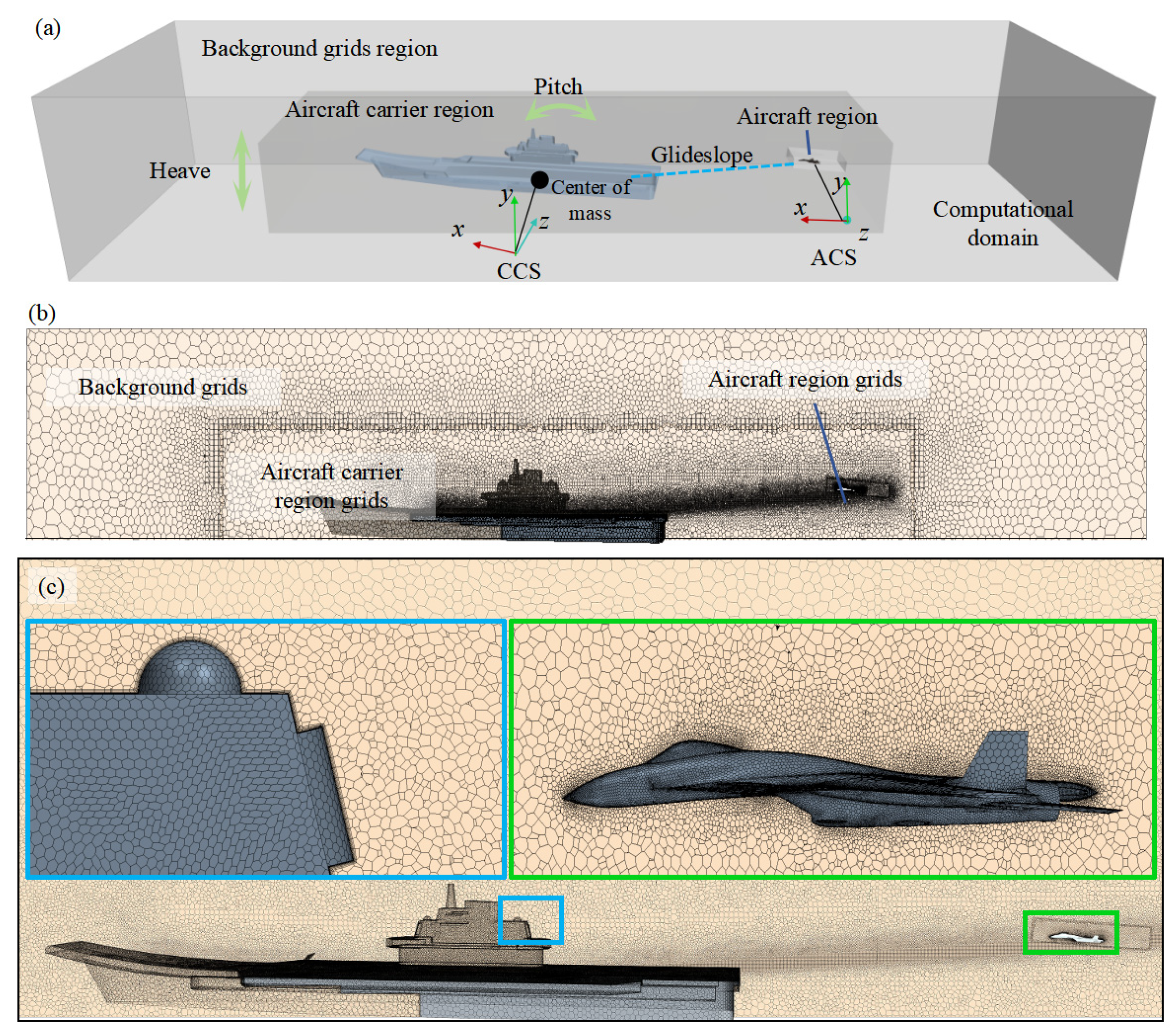
2.2. Overset Grid Method
3. Numerical Details
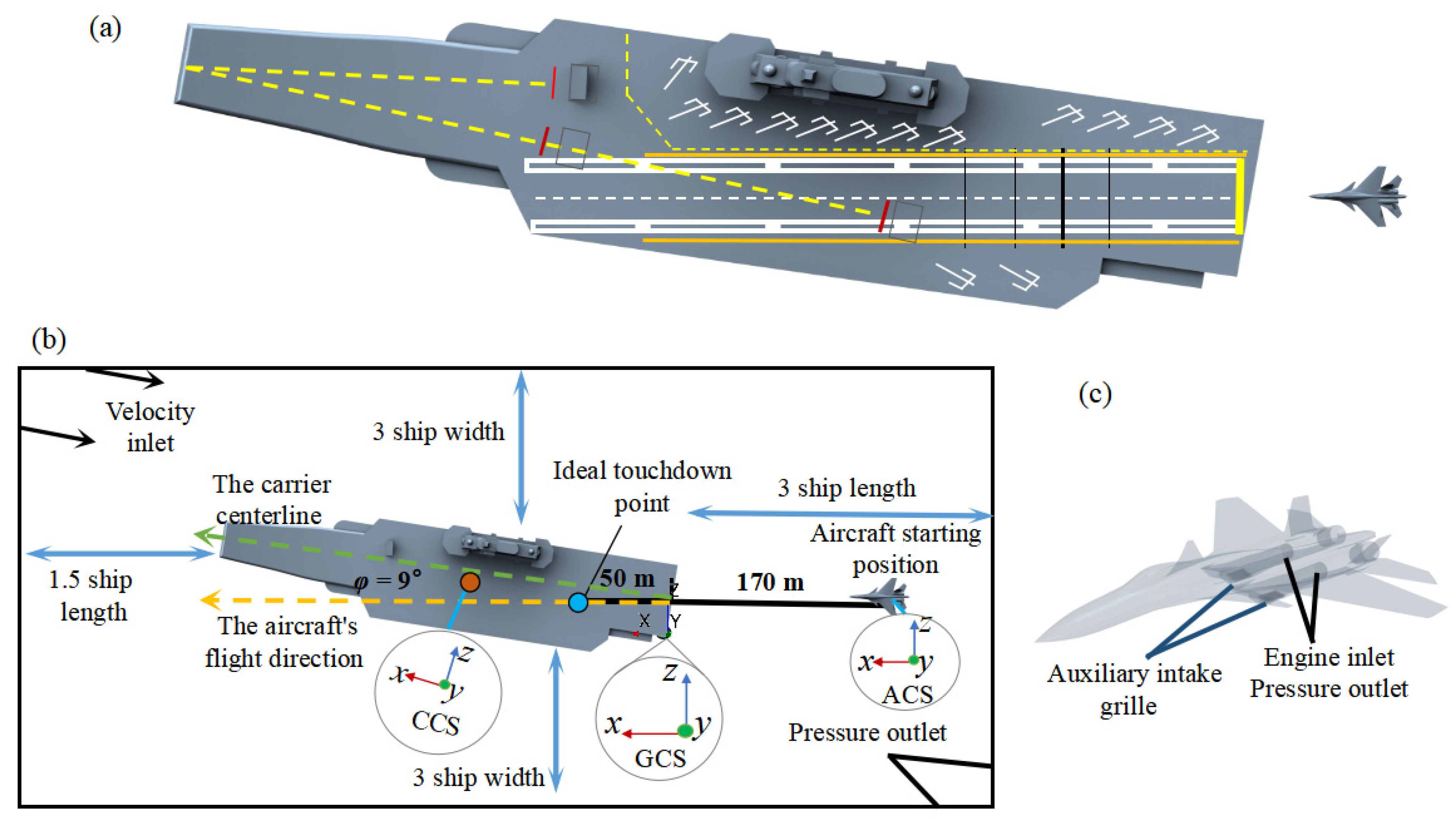
3.1. Geometry Models and Boundary Conditions
3.2. Grid Generation
3.3. Grid Independence Validation
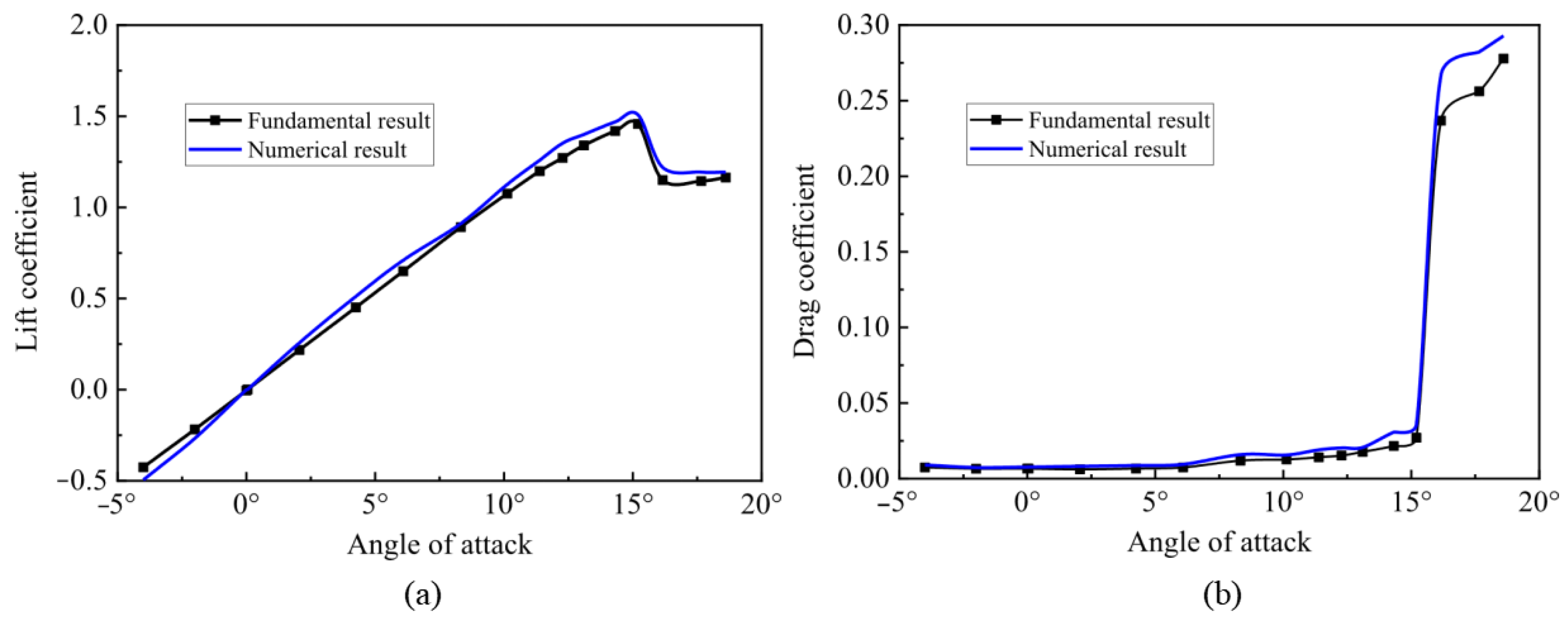
3.4. Validation of Numerical Results
4. Results and Discussion
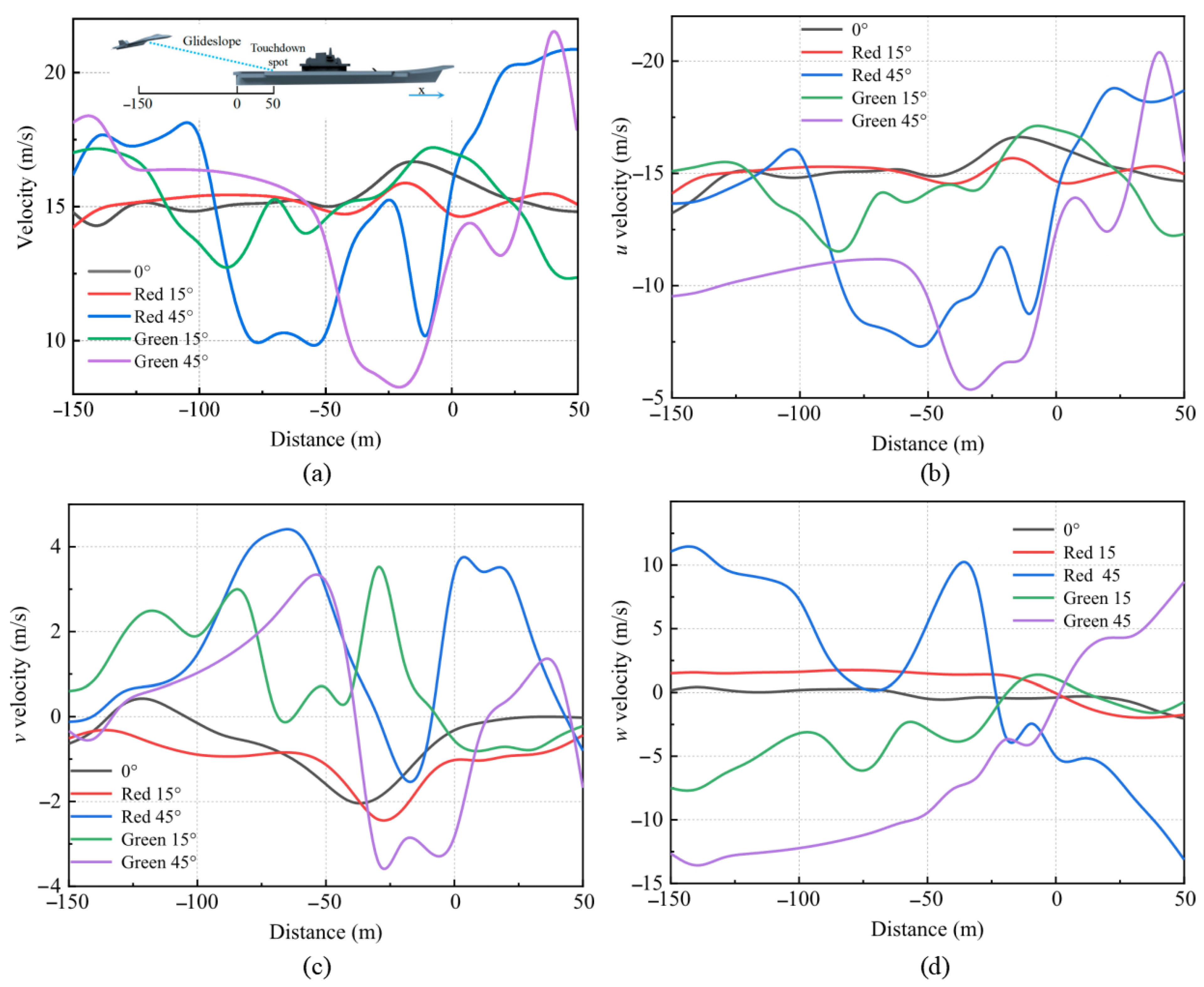
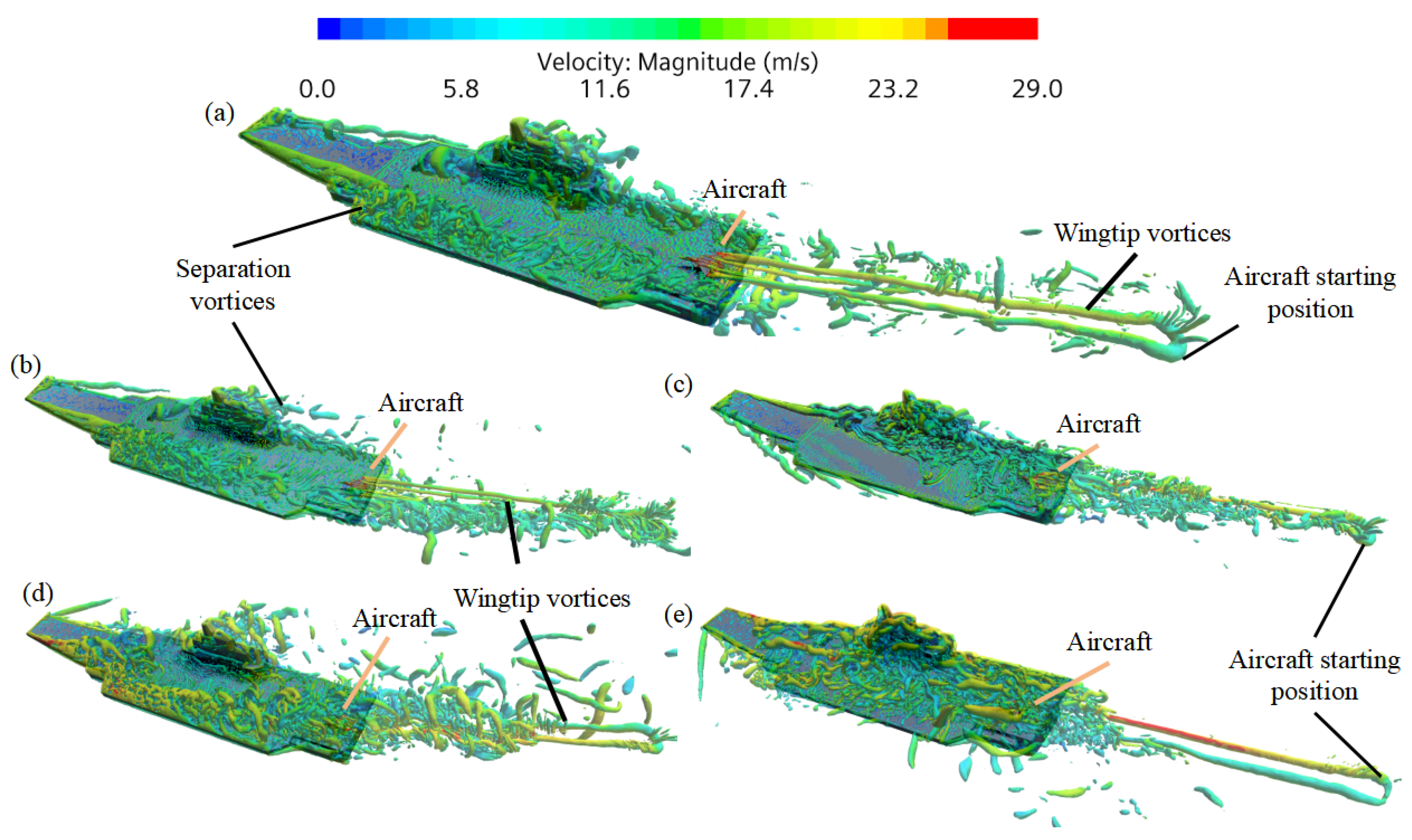
4.1. Aircraft Carrier Airwake
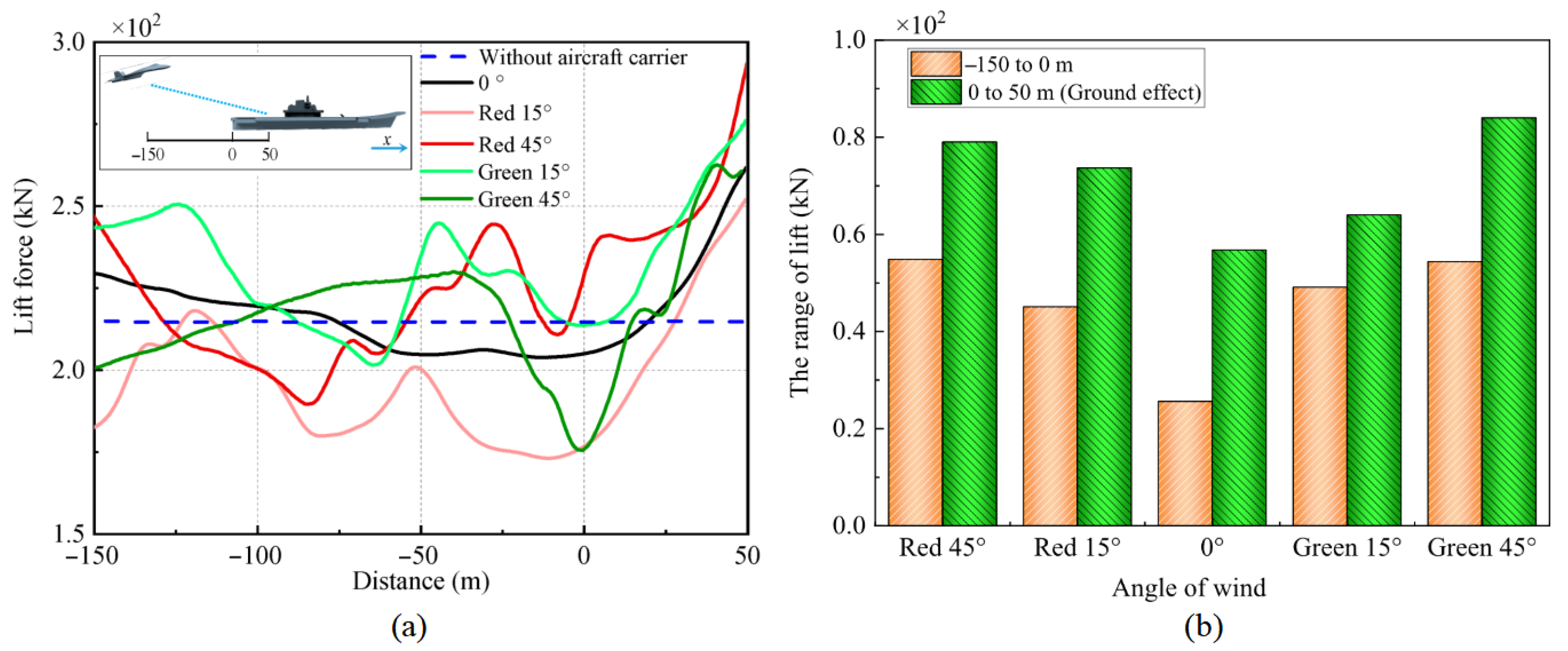
4.2. Influence of Airwake on Aircraft Aerodynamic Loads
4.3. Influence of the Airwake on the Lift Under Ship Motion
5. Conclusions
- (1)
- The airflow around the aircraft carrier undergoes significant disturbance due to the carrier’s structure. Upwash, downwash, and lateral transition zones were identified within 150 m of the carrier’s hull.
- (2)
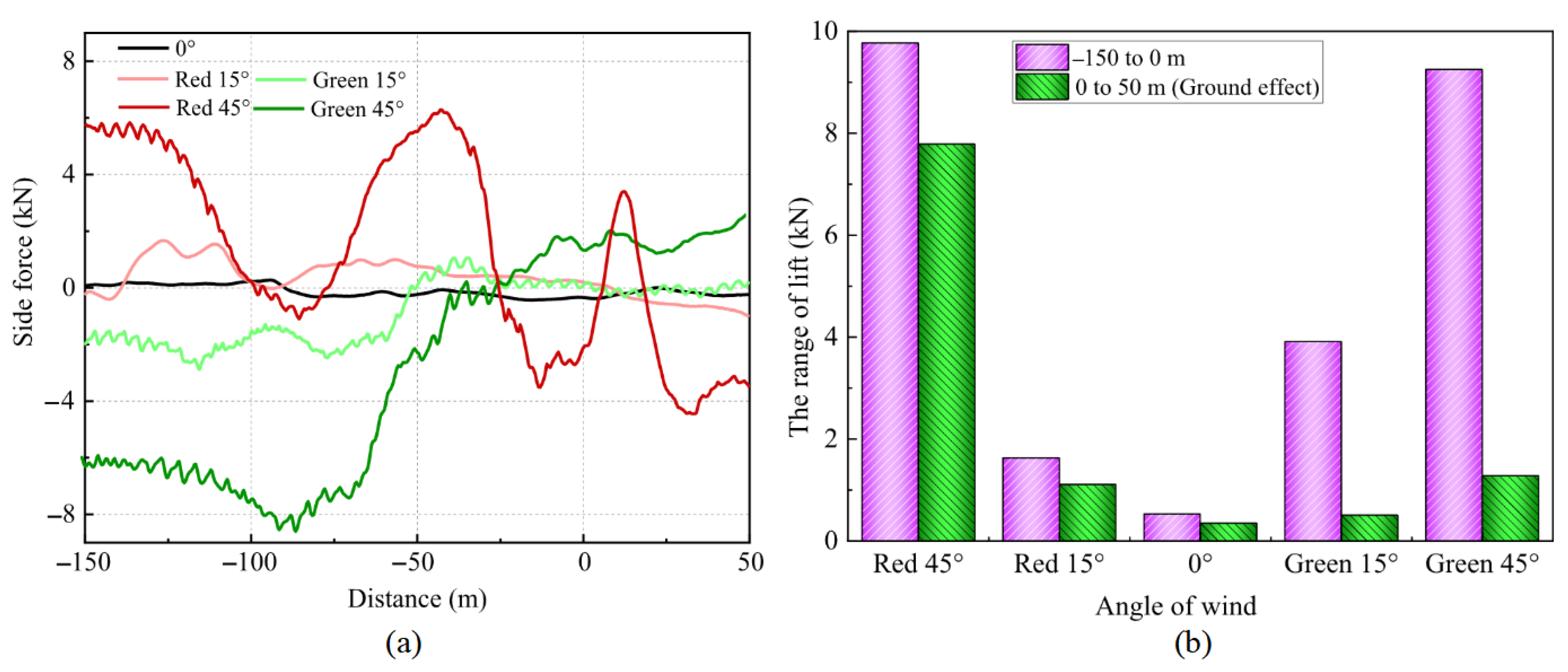
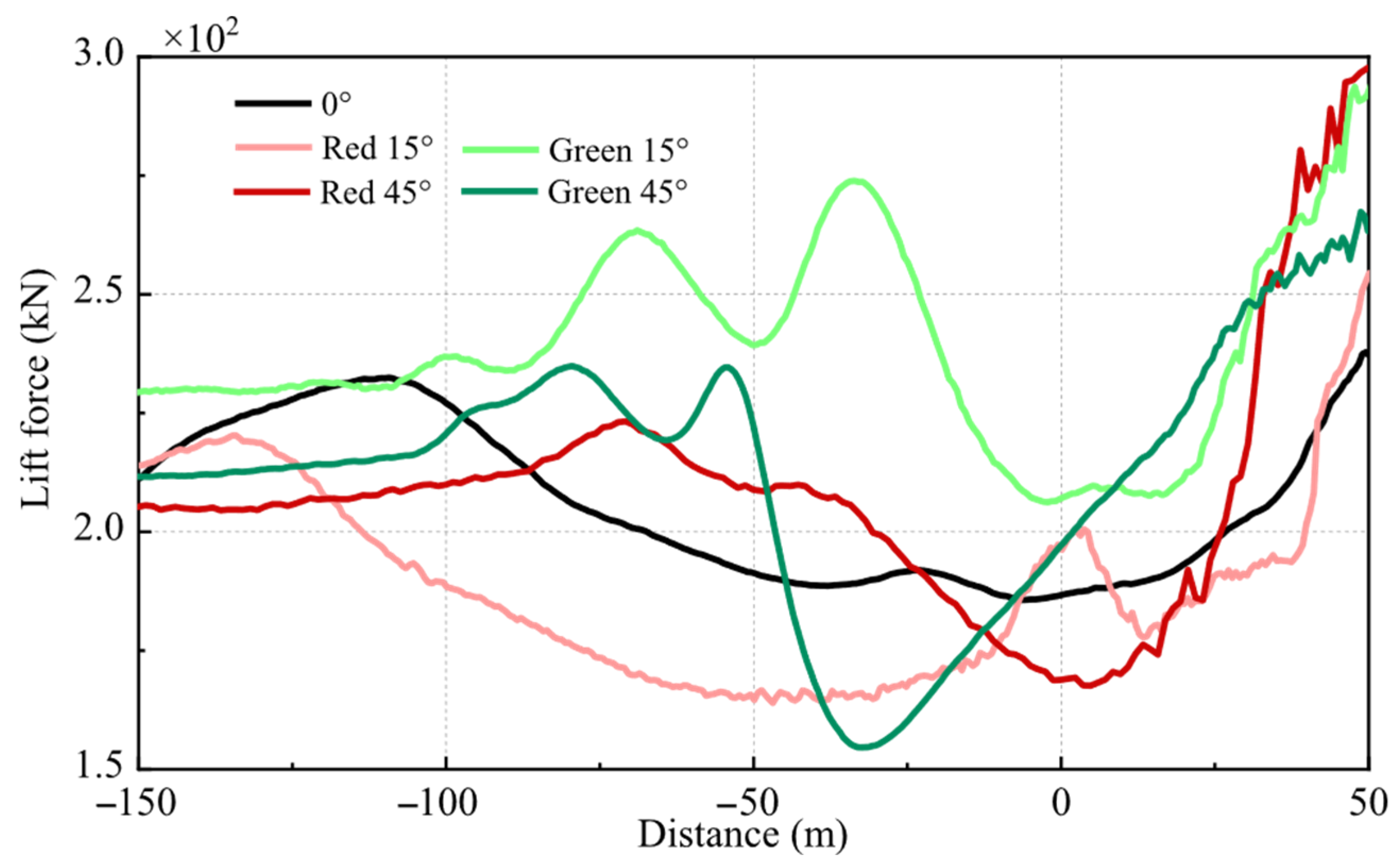
- The trends in aircraft lift and side force variations closely resemble the airwake variations along the glideslope in the airwake but are not entirely consistent. The minimum aircraft lift occurs within 100 m of the stern, where a sudden decrease in lift could increase the risk of collision with the hull. As the wind angle increases, the aircraft drag rises, further intensifying as the aircraft approaches the hull. Additionally, during the aircraft’s approach to the hull, the side forces reverse direction, with larger wind angles generating greater turning forces.
- (3)
- Above the deck, the aircraft’s forces are predominantly influenced by the ground effect. As the aircraft approaches the deck, a sharp increase in lift occurs, potentially increasing the failure rate of the arresting cable hook.
- (4)
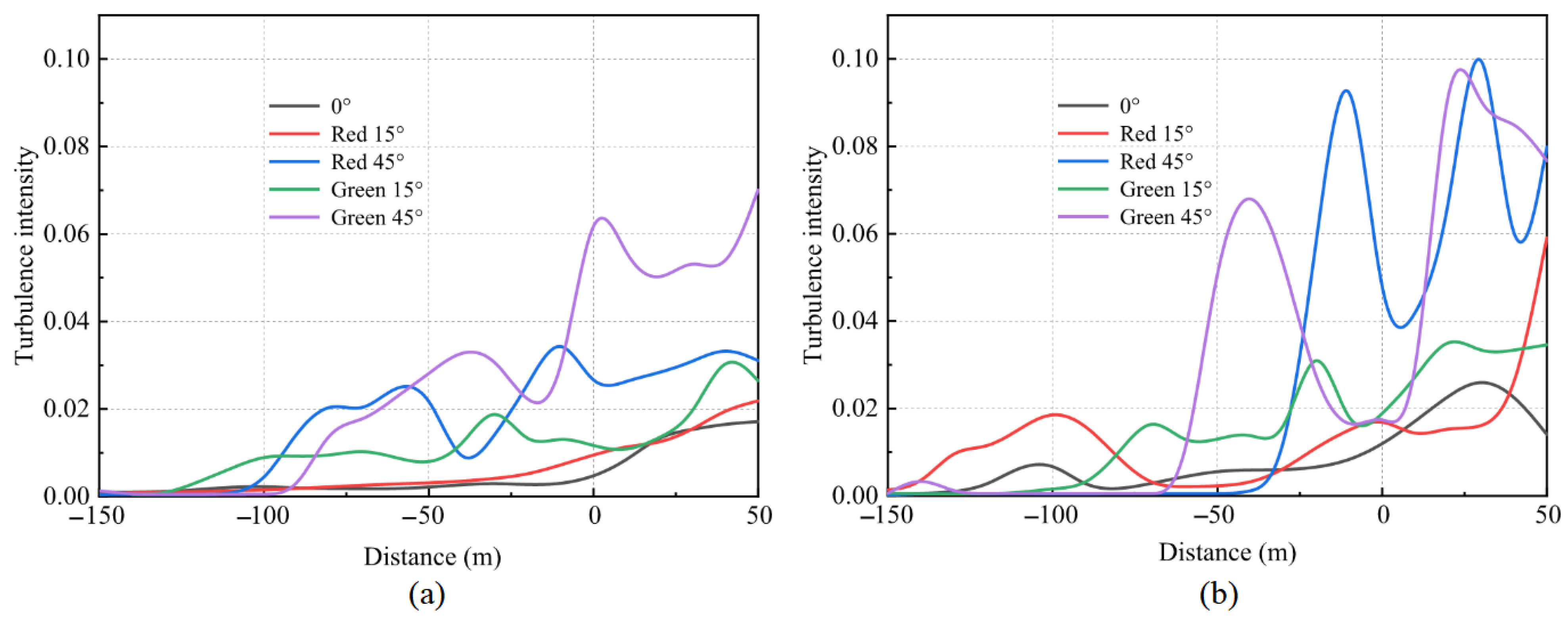
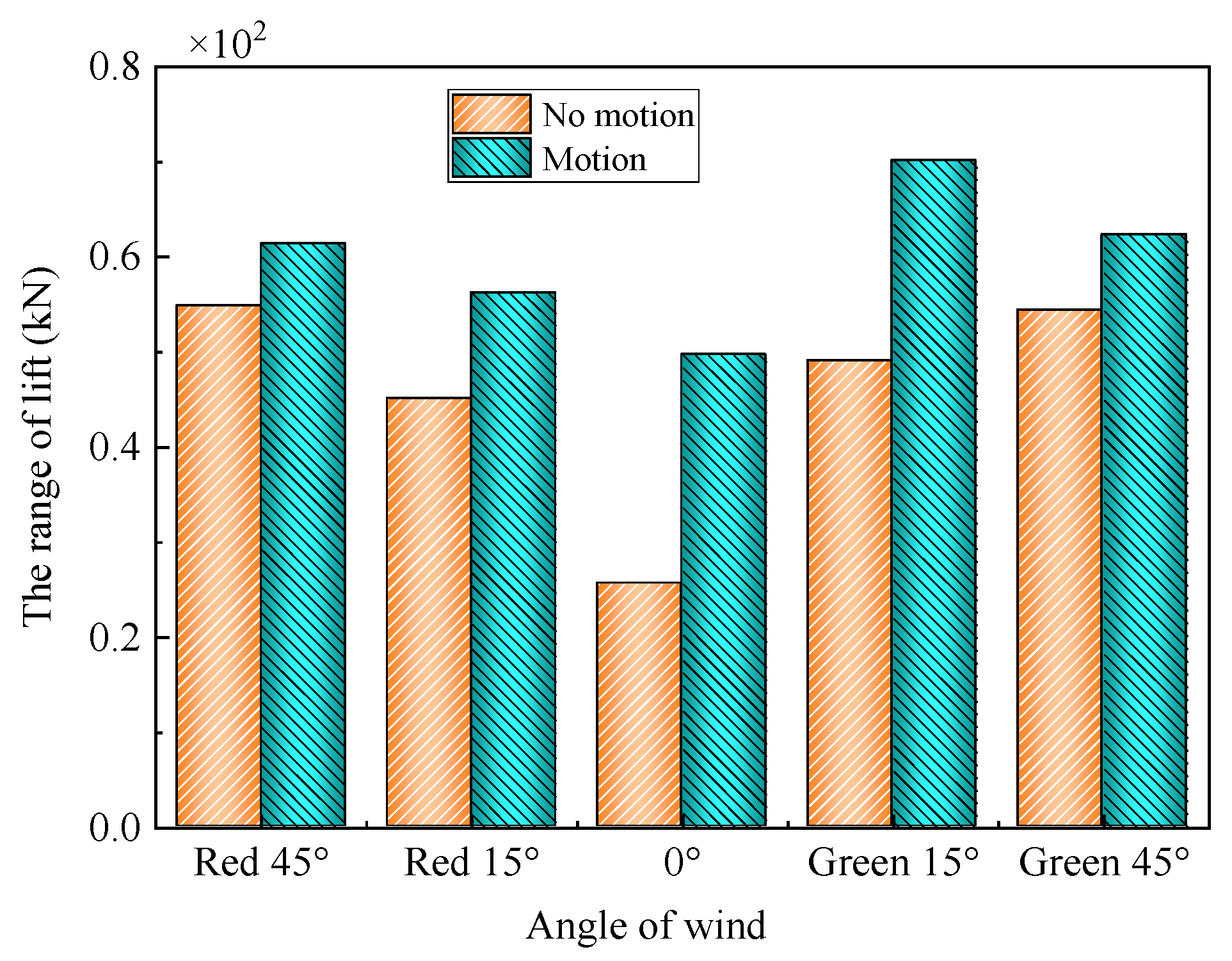
- The hull’s vertical motion intensifies the turbulence intensity of the airwake, ultimately resulting in a wider range of aircraft lift values during the landing process.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AOA | Angle of Attack |
| ACS | Aircraft Coordinate System |
| CCS | Aircraft Carrier Coordinate System |
| GCS | Global Coordinate System |
| Nomeculture | |
| F1, F2 | Blended function |
| h | Height of the ship heave motion |
| j | Waypoint index |
| k | Turbulent kinetic energy |
| l | Length scale |
| Pk | Production of turbulent kinetic energy |
| S | The magnitude of the strain rate tensor |
| uj | Velocity component |
| xj | The spatial coordinate component |
| y | The distance to the nearest wall |
| y+ | Non-dimensional wall distance |
| Δ | The maximum edge length of the cell |
| ψ | The angle of ship pitch |
| μ | Dynamic viscosity |
| μt | Turbulent viscosity |
| ν | Kinematic viscosity |
| νt | Turbulent kinematic viscosity |
| ρ | Density |
| Ω | The vorticity tensor |
| ω | The specific dissipation rate |
References
- Zamiri, A.; Chung, J.T. Numerical evaluation of wind direction effects on the turbulence aerodynamics of a ship airwake. Ocean. Eng. 2023, 284, 115104. [Google Scholar] [CrossRef]
- Cherry, B.E.; Constantino, M.M. The Burble Effect Superstructure and Flight Deck Effects on Carrier Air Wake. In Proceedings of the American Society of Naval Engineers Launch and Recovery Symposium, Arlington, VA, USA, 8–9 December 2010; United States Naval Academy: Annapolis, MD, USA, 2010. [Google Scholar]
- Shukla, S.; Sinha, S.S.; Singh, S.N. Ship-helo coupled airwake aerodynamics: A comprehensive review. Prog. Aerosp. Sci. 2019, 106, 71–107. [Google Scholar] [CrossRef]
- Bardera, R.; Barcala-Montejano, M.A.; Rodríguez-Sevillano, A.A.; León-Calero, M. Wind flow investigation over an aircraft carrier deck by PIV. Ocean. Eng. 2019, 178, 476–483. [Google Scholar] [CrossRef]
- Owen, I.; Lee, R.; Wall, A.; Fernandez, N. The NATO generic destroyer—A shared geometry for collaborative research into modelling and simulation of shipboard helicopter launch and recovery. Ocean Eng. 2021, 228, 108428. [Google Scholar] [CrossRef]
- Setiawan, H.; Kevin; Philip, J.; Monty, J.P. Turbulence characteristics of the ship air-wake with two different topside arrangements and inflow conditions. Ocean Eng. 2022, 260, 111931. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, S.; Sinha, S.; Vijayakumar, R. Vijayakumar, Comparative assessment of URANS, SAS and DES turbulence modeling in the predictions of massively separated ship airwake characteristics. Ocean Eng. 2021, 229, 108954. [Google Scholar] [CrossRef]
- Shipman, J.; Arunajatesan, S.; Menchini, C.; Sinha, N. Ship Airwake Sensitivities To Modeling Parameters. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005. [Google Scholar]
- Thornber, B.; Starr, M.; Drikakis, D. Implicit Large Eddy Simulation of Ship Airwakes. Aeronaut. J. 2010, 114, 715–736. [Google Scholar] [CrossRef]
- Spalart, P.R. Comments on the feasibility of LES for wings, and on a hybrid RANS/LES approach. In Proceedings of the First AFOSR International Conference on DNS/LES, Ruston, LA, USA, 4–8 August 1997. [Google Scholar]
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Forrest, J.S.; Owen, I. An investigation of ship airwakes using Detached-Eddy Simulation. Comput. Fluids 2010, 39, 656–673. [Google Scholar] [CrossRef]
- Watson, N.A.; Kelly, M.F.; Owen, I.; Hodge, S.J.; White, M.D. Computational and experimental modelling study of the unsteady airflow over the aircraft carrier HMS Queen Elizabeth. Ocean Eng. 2019, 172, 562–574. [Google Scholar] [CrossRef]
- Kelly, M.F.; White, M.; Owen, I.; Hodge, S.J. Using airwake simulation to inform flight trials for the Queen Elizabeth Class Carrier. In Proceedings of the 13th International Naval Engineering Conference, INEC 2016, Bristol, UK, 26–28 April 2016. [Google Scholar]
- Nisham, A.; Terziev, M.; Tezdogan, T.; Beard, T.; Incecik, A. Prediction of the aerodynamic behaviour of a full-scale naval ship in head waves using Detached Eddy Simulation. Ocean Eng. 2021, 222, 108583. [Google Scholar] [CrossRef]
- Yang, X.; Li, B.; Ren, Z.; Tian, F. Numerical Simulation of the Unsteady Airwake of the Liaoning Carrier Based on the DDES Model Coupled with Overset Grid. J. Mar. Sci. Eng. 2024, 12, 1598. [Google Scholar] [CrossRef]
- Shipman, J.; Cavallo, P.; Arunajatesan, S.; Sinha, N. Dynamic CFD Simulation of Aircraft Recovery to an Aircraft Carrier. In Proceedings of the 26th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Lee, D.; Sezer-Uzol, N.; Horn, J.F.; Long, L.N. Simulation of helicopter shipboard launch and recovery with time-accurate airwakes. J. Aircr. 2005, 42, 448–461. [Google Scholar] [CrossRef]
- Kääriä, C.H.; Wang, Y.; Padfield, G.D.; Forrest, J.S.; Owen, I. Aerodynamic Loading Characteristics of a Model-Scale Helicopter in a Ship’s Airwake. J. Aircr. 2012, 49, 1271–1278. [Google Scholar] [CrossRef]
- Forrest, J.S.; Owen, I.; Padfield, G.D.; Hodge, S.J. Ship-Helicopter Operating Limits Prediction Using Piloted Flight Simulation and Time-Accurate Airwakes. J. Aircr. 2012, 49, 1020–1031. [Google Scholar] [CrossRef]
- Watson, N.A.; Owen, I.; White, M.D. Piloted Flight Simulation of Helicopter Recovery to the Queen Elizabeth Class Aircraft Carrier. J. Aircr. 2020, 57, 742–760. [Google Scholar] [CrossRef]
- Bridges, D.; Horn, J.; Alpman, E.; Long, L. Coupled Flight Dynamics and CFD Analysis of Pilot Workload in Ship Airwakes. In Proceedings of the AlAA Atmospheric FlightDynamics Conference, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar]
- Kääriä, C.H.; Wang, Y.; White, M.D.; Owen, I. An experimental technique for evaluating the aerodynamic impact of ship superstructures on helicopter operations. Ocean. Eng. 2013, 61, 97–108. [Google Scholar] [CrossRef]
- Forrest, J.; Kaaria, C.; Owen, I. Evaluating ship superstructure aerodynamics for maritime helicopter operations through CFD and flight simulation. Aeronaut. J. 2016, 120, 1578–1603. [Google Scholar] [CrossRef]
- Shi, Y.; Su, D.; Xu, G. Numerical investigation of the influence of passive/active flow control on ship/helicopter dynamic interface. Aerosp. Sci. Technol. 2020, 106, 106205. [Google Scholar] [CrossRef]
- Su, D.; Xu, G.; Huang, S.; Shi, Y. Numerical investigation of rotor loads of a shipborne coaxial-rotor helicopter during a vertical landing based on moving overset mesh method. Eng. Appl. Comput. Fluid Mech. 2019, 13, 309–326. [Google Scholar] [CrossRef]
- Dooley, G.M.; Carrica, P.; Martin, J.; Krebill, A.; Buchholz, J. Effects of Waves, Motions and Atmospheric Turbulence on Ship Airwakes. In Proceedings of the AIAA Scitech 2019, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Dooley, G.; Martin, J.E.; Buchholz, J.H.; Carrica, P.M. Ship Airwakes in Waves and Motions and Effects on Helicopter Operation. Comput. Fluids 2020, 208, 104627. [Google Scholar] [CrossRef]
- Thedin, R.; Kinzel, M.P.; Horn, J.F.; Schmitz, S. Coupled Simulations of Atmospheric Turbulence-Modified Ship Airwakes and Helicopter Flight Dynamics. J. Aircr. 2019, 56, 812–824. [Google Scholar] [CrossRef]
- Thedin, R.; Murman, S.M.; Horn, J.; Schmitz, S. Effects of Atmospheric Turbulence Unsteadiness on Ship Airwakes and Helicopter Dynamics. J. Aircr. 2020, 57, 534–546. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model, Turbulence. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Zhang, J.; Minelli, G.; Rao, A.N.; Basara, B.; Bensow, R.; Krajnović, S. Comparison of PANS and LES of the flow past a generic ship. Ocean Eng. 2018, 165, 221–236. [Google Scholar] [CrossRef]
- Ladson, C. Effects of Independent Variation of Mach and Reynolds Numbers on the Low-Speed Aerodynamic Characteristics of the NACA 0012 Airfoil Section. In Proceedings of the NASA Langley Research Center, NASA Technical Memorandum 4074, Hampton, VA, USA, 23 August 1988. [Google Scholar]
- Xu, K.; Su, X.; Bensow, R.; Krajnovic, S. Large eddy simulation of ship airflow control with steady Coanda effect. Phys. Fluids 2023, 35, 015112. [Google Scholar] [CrossRef]
- Li, X. Simulation of Key Technology of Lanuch and Land for Carrier-Based Aircraft; Harbin Engineering University: Harbin, China, 2012; pp. 23–25. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Value |
|---|---|
| Aircraft carrier length | 304 m |
| Horizontal deck height | 16 m |
| Deck width | 68 m |
| Island height | 27 m |
| Displacement | 6 × 104 t |
| Aircraft length | 22 m |
| Wingspan | 14 m |
| Aircraft mass | 22 t |
| Time Step | Residual | |
|---|---|---|
| Continuity | x-Momentum | |
| 0.003 s | Divergency | Divergency |
| 0.002 s | 10−1 | 3 × 10−2 |
| 0.001 s | 1.2 × 10−3 | 2 × 10−4 |
| 0.0005 s | 10−3 | 10−4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Li, B.; Nie, Y.; Ren, Z.; Tian, F. Transient Simulation of Aerodynamic Load Variations on Carrier-Based Aircraft During Recovery in Carrier Airwake. Aerospace 2025, 12, 656. https://doi.org/10.3390/aerospace12080656
Yang X, Li B, Nie Y, Ren Z, Tian F. Transient Simulation of Aerodynamic Load Variations on Carrier-Based Aircraft During Recovery in Carrier Airwake. Aerospace. 2025; 12(8):656. https://doi.org/10.3390/aerospace12080656
Chicago/Turabian StyleYang, Xiaoxi, Baokuan Li, Yang Nie, Zhibo Ren, and Fangchao Tian. 2025. "Transient Simulation of Aerodynamic Load Variations on Carrier-Based Aircraft During Recovery in Carrier Airwake" Aerospace 12, no. 8: 656. https://doi.org/10.3390/aerospace12080656
APA StyleYang, X., Li, B., Nie, Y., Ren, Z., & Tian, F. (2025). Transient Simulation of Aerodynamic Load Variations on Carrier-Based Aircraft During Recovery in Carrier Airwake. Aerospace, 12(8), 656. https://doi.org/10.3390/aerospace12080656