
A Stochastic Optimization Model for Multi-Airport Flight Cooperative Scheduling Considering CvaR of Both Travel and Departure Time



Abstract
1. Introduction
2. Related Work
3. Methodology
3.1. Research Framework
- (1)
- The no-fly status of the air traffic network can be obtained in advance.
- (2)
- The safe interval time of two adjacent flights passing through the same waypoint is assumed to be a fixed interval independent of their altitude level.
- (3)
- The safe interval time of any two adjacent flights leaving the same airport, with no relation to the number of runways, is a fixed interval.
- (4)
- The uncertain statistical characteristics for travel times between nodes and departure times of all flights can also be estimated through big data analysis of flight operations.
- (5)
- The carbon emission per unit time/mileage for each flight can be obtained in advance.
3.2. Notations
3.3. Formulation
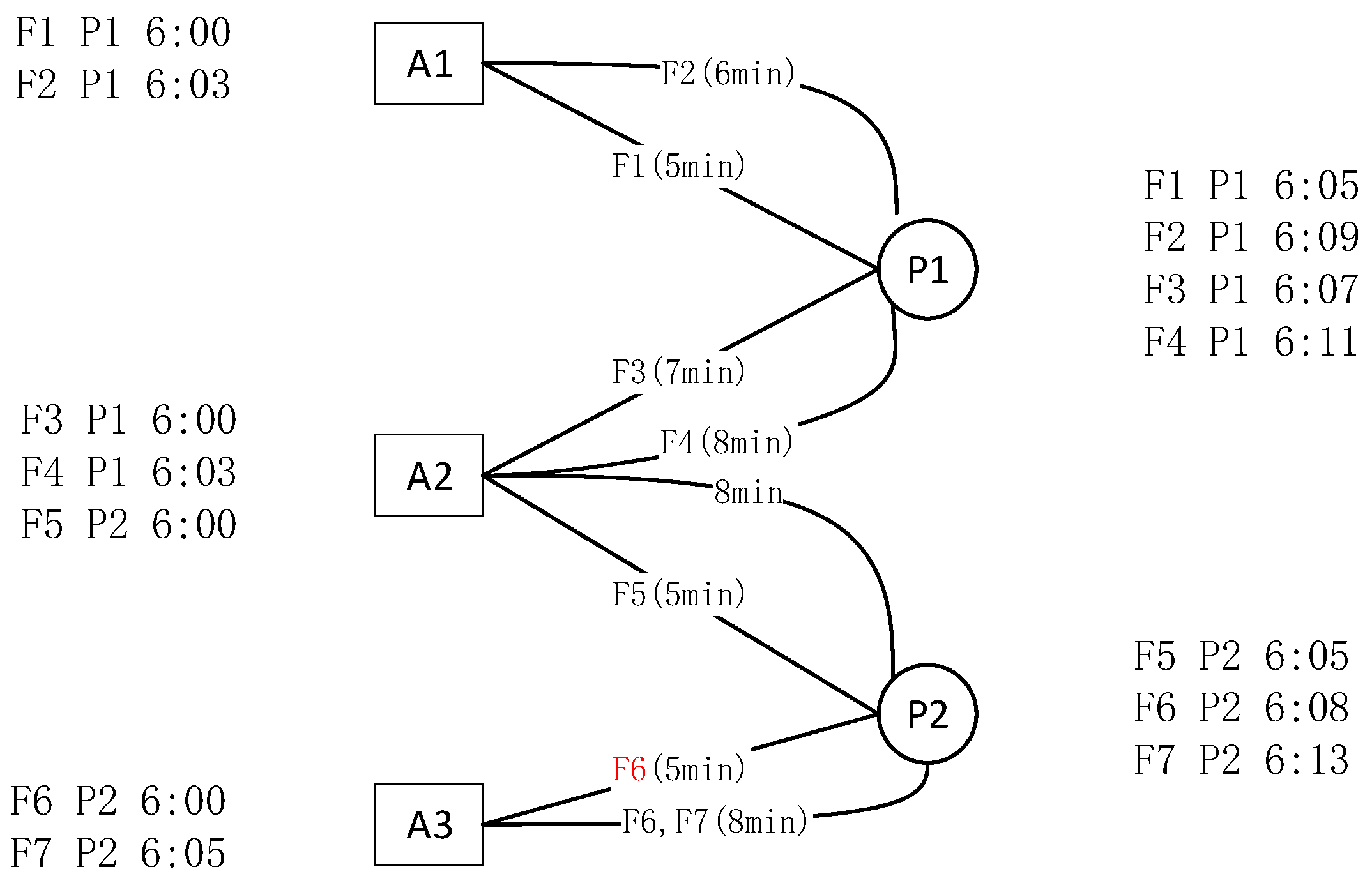
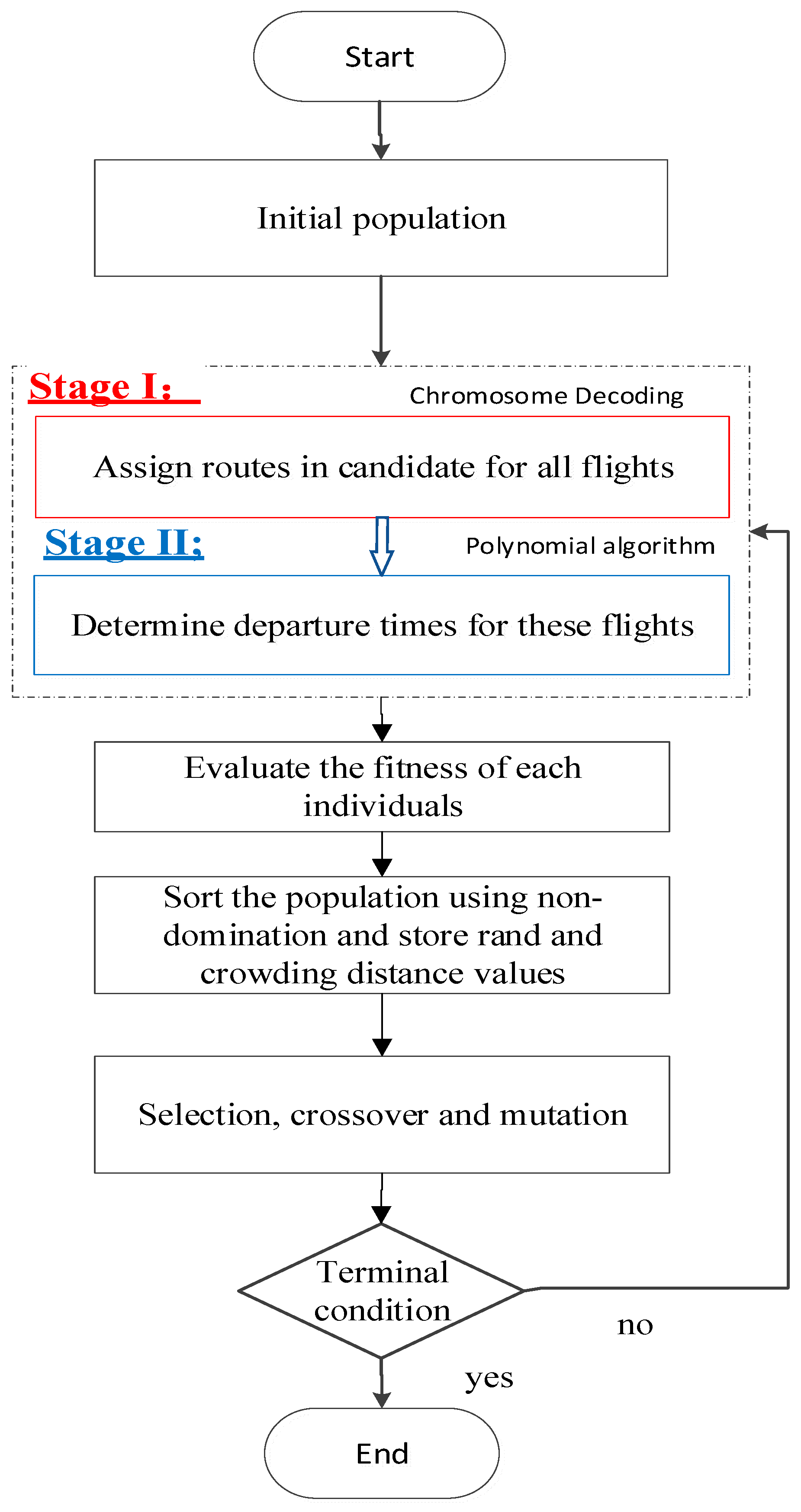
4. Two-Stage Heuristic Approach-Based NSGA-II for Solving MAFCSP
4.1. NSGA-II in the First Stage
4.2. Polynomial Algorithm in Second Stage
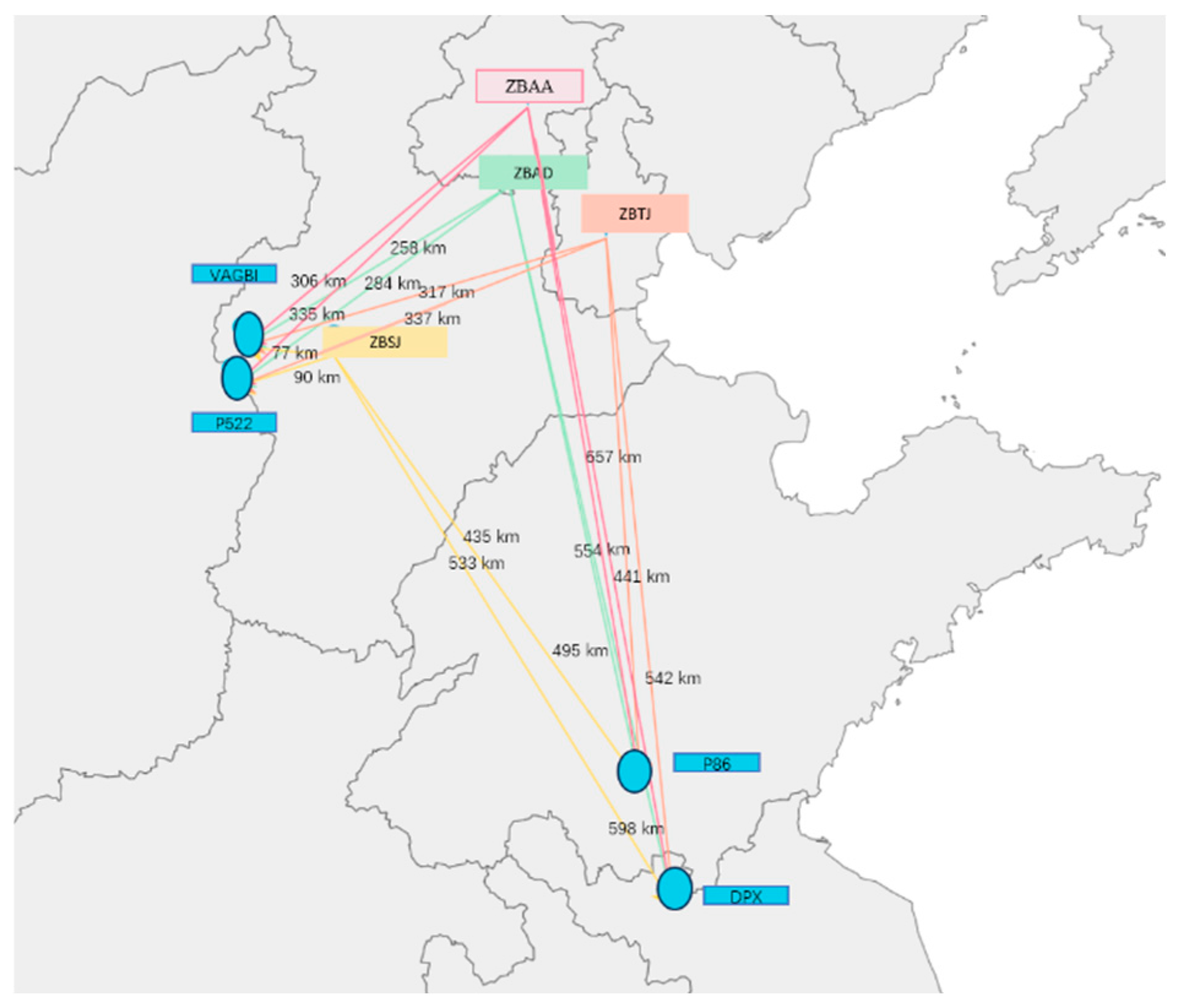
5. Case Study
5.1. Example Description
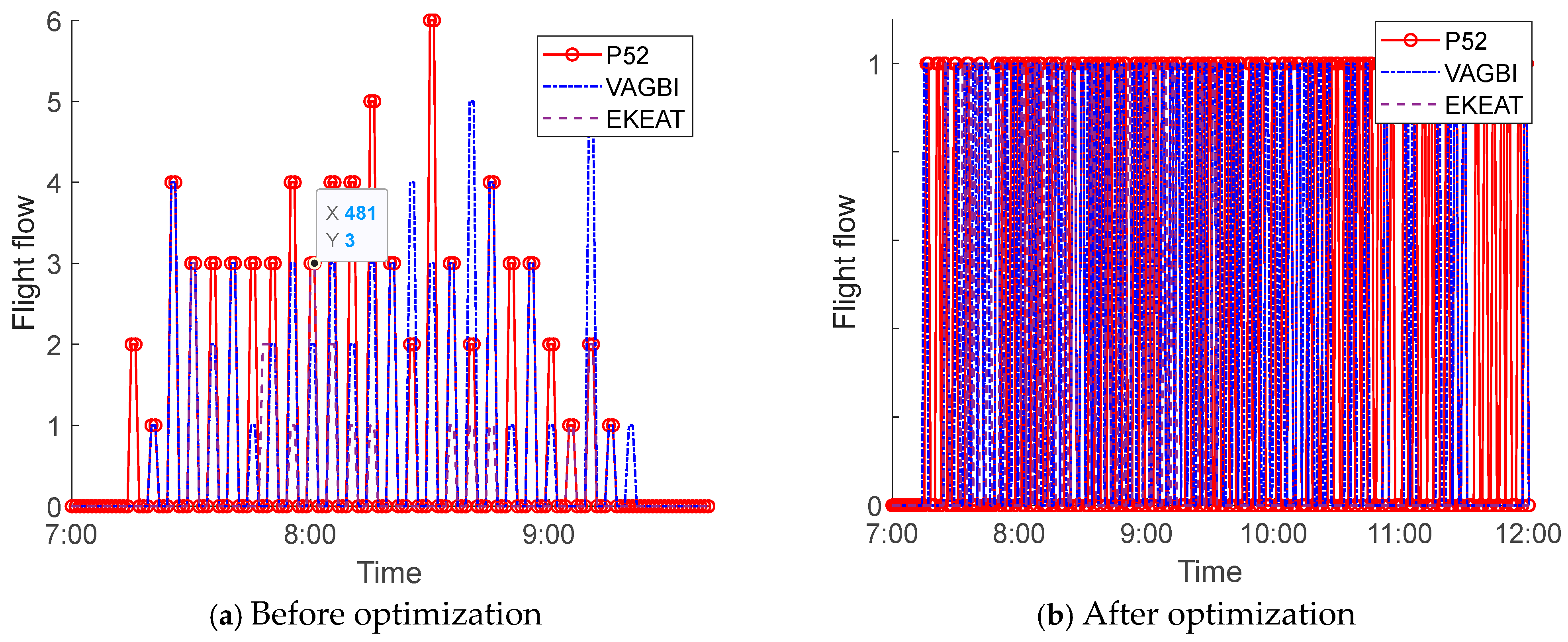
5.2. Results
5.3. Comparative Analysis and Parameter Sensitivity
6. Conclusions
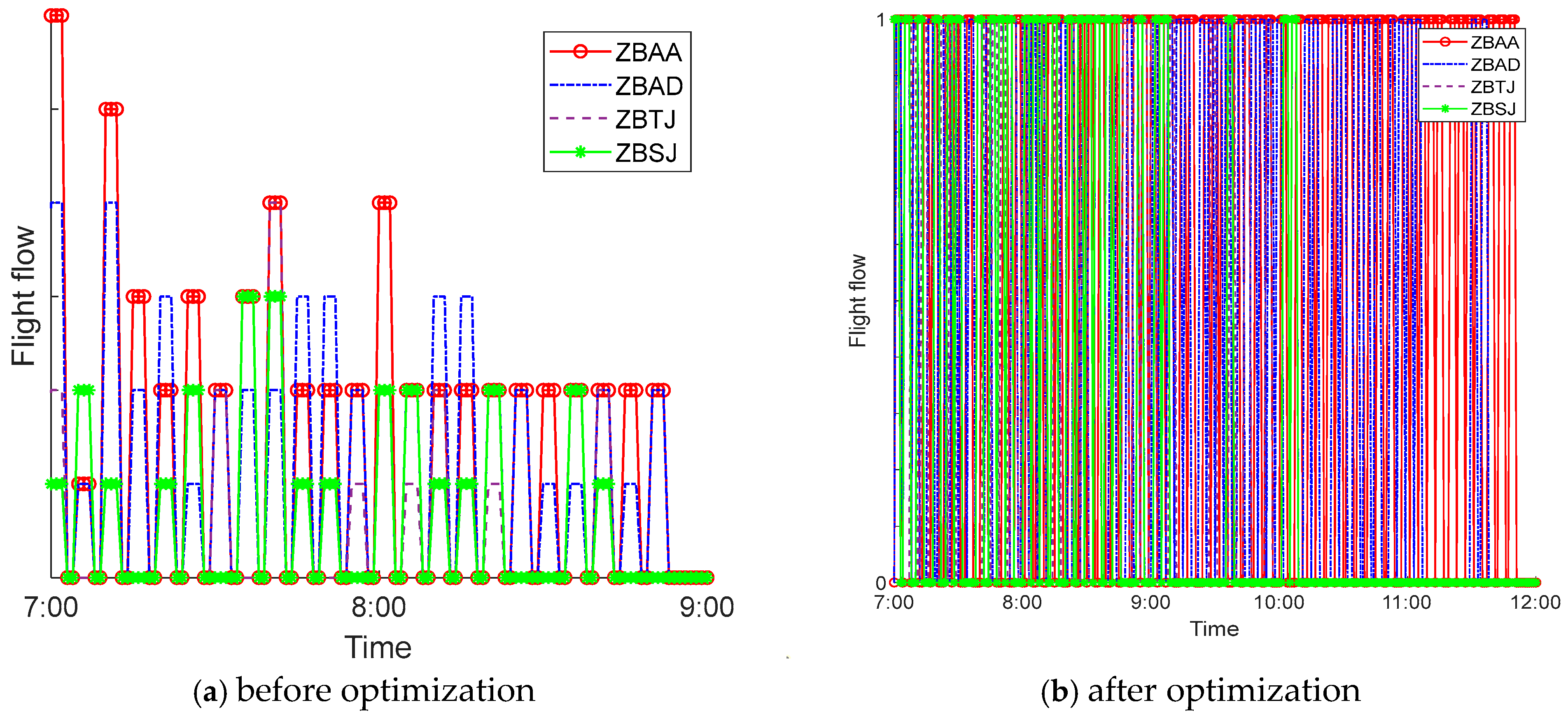
- (1)
- Before optimization, due to the unreasonable planned departure time, the capacity of airports and route points in some periods was less than the number of flights. After optimization, the capacity of airports and route points at all times is greater than the number of flights, but more queuing dissipation time is required for all flights to complete the departure process.
- (2)
- An increase in total carbon emissions related to mileages results in a reduction in total flight delays. This phenomenon occurs because when two flights on their shortest routes may conflict at the same waypoint, one flight can circumvent simultaneous passage through that waypoint by opting for a detour.
- (3)
- The increase in the specific confidence level results in a bigger value of CvaR, causing an increase in flight time between airports and waypoints, as well as more delays in the departure time of each flight. Although a schedule with a larger CvaR leads to more total carbon emissions, it is robust and easily applied in practice.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, B.; Xu, Z.; Wei, M.; Wang, X. A study on the strategic behavior of players participating in air-rail intermodal transportation based on evolutionary games. J. Air Transp. Manag. 2025, 126, 102793. [Google Scholar] [CrossRef]
- Wei, M.; Xiong, Y.; Sun, B. Spatial effects of urban economic activities on airports’ passenger throughputs: A case study of thirteen cities and nine airports in the Beijing-Tianjin-Hebei region, China. J. Air Transp. Manag. 2025, 125, 102765. [Google Scholar] [CrossRef]
- Yan, J.; Hu, M. Worst-case robust model of multi-period airport group coordinated flight timetable. J. Nonlinear Convex Anal. 2025, 26, 1951–1969. [Google Scholar]
- Yan, J.; Hu, M. Robust Optimization Model of Airport Group Coordinated Timetable with Uncertain Flight Time. Aerospace 2025, 11, 457. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, X. Passenger transfer efficiency in multi-airport systems. Transp. Res. Part E Logist. Transp. Rev. 2015, 79, 21–33. [Google Scholar]
- Liu, M.; Sun, Z.; Zhang, X.; Chu, F. A two-stage no-wait hybrid flow-shop model for the flight departure scheduling in a multi-airport system. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 495–500. [Google Scholar]
- Liu, Y.; Zhang, X. Robust slot allocation under uncertain conditions in multi-airport systems. J. Air Traffic Manag. 2016, 54, 42–53. [Google Scholar] [CrossRef]
- Huang, X.; Tian, Y.; Li, J.; Zhang, N.; Dong, X.; Lv, Y.; Li, Z. Joint autonomous decision-making of conflict resolution and aircraft scheduling based on triple-aspect improved multi-agent reinforcement learning. J. Expert Syst. Appl. 2025, 275, 127024. [Google Scholar] [CrossRef]
- Yu, B.; Guo, Z.; Asian, S.; Wang, H.; Chen, G. Flight delay prediction for commercial air transport: A deep learning approach. J. Transp. Res. Part E Logist. Transp. Rev. 2019, 125, 203–221. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H. A two-stage slot allocation model for multi-airport systems. Transp. Res. Part C Emerg. Technol. 2016, 69, 264–278. [Google Scholar]
- Zhang, W.; Liu, X. Airspace structure optimization for multi-airport systems. J. Aerosp. Eng. 2015, 28, 05014015. [Google Scholar]
- Zhou, R. Voronoi-based airspace structure model for multi-airport systems. Air Traffic Manag. J. 2014, 45, 183–195. [Google Scholar]
- Feng, C.; Zhang, X. Predicting airport capacity using neural networks. J. Transp. Eng. 2018, 144, 04018045. [Google Scholar]
- Liu, C.; Wang, X.; Guo, J.; Huang, M.; Wu, X. Chance-constrained scheduling model of grid-connected microgrid based on probabilistic and robust optimization. J. IET Gener. Transm. Distrib. 2018, 12, 2499–2509. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, H. Dual-objective optimization framework for runway scheduling. J. Air Transp. Manag. 2019, 73, 85–98. [Google Scholar]
- Liu, Z.; McConkey, C. Hybrid Optimization Models in Multi-Airport Systems. J. Appl. Oper. Res. 2018, 50, 74–92. [Google Scholar]
- Zhou, H.; Zhang, L. Air Traffic Management in Multi-Airport Systems: A Review. Transp. Res. Part A Policy Pract. 2016, 93, 58–72. [Google Scholar]
- Civil Aviation Administration of China. 2025 Strategic Plan for Multi-Airport Systems; Civil Aviation Administration of China: Beijing, China, 2020.
- Feng, H.; Hu, R.; Wang, D.; Zhang, J.; Wu, C. Bi-objective airport slot scheduling considering scheduling efficiency and noise abatement. Transp. Res. Part D Transp. Environ. 2023, 115, 103591. [Google Scholar] [CrossRef]
- Katsigiannis, F.A.; Zografos, K.G.; Fairbrother, J. Modelling and solving the airport slot-scheduling problem with multi-objective, multi-level considerations. Transp. Res. Part C Emerg. Technol. 2021, 124, 102914. [Google Scholar] [CrossRef]
- Katsigiannis, F.A.; Zografos, K.G. Optimising airport slot allocation considering flight-scheduling flexibility and total airport capacity constraints. Transp. Res. Part B Methodol. 2021, 146, 50–87. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, C.; Wang, H.; Duong, V. Slot allocation for a multiple-airport system considering airspace capacity and flying time uncertainty. Transp. Res. Part C Emerg. Technol. 2023, 153, 104185. [Google Scholar] [CrossRef]
- Corolli, L.; Lulli, G.; Ntaimo, L. The time slot allocation problem under uncertain capacity. Transp. Res. Part C Emerg. Technol. 2014, 46, 16–29. [Google Scholar] [CrossRef]
- Liu, C.; Liao, C.; Hang, X.; Wang, Y.; Delahaye, D. Slot allocation in a multi-airport system under flying time uncertainty. In Proceedings of the International Workshop on ATM/CNS (IWAC), Tokyo, Japan, 25–27 October 2022. [Google Scholar]
- Liu, W.; Zhao, Q.; Delahaye, D. Research on slot allocation for airport network in the presence of uncertainty. J. Air Transp. Manag. 2022, 104, 102269. [Google Scholar] [CrossRef]
- Clare, G.; Richards, A. Air traffic flow management under uncertainty: Application of chance constraints. In Proceedings of the 2nd International Conference on Application and Theory of Automation in Command and Control Systems, Toulouse, France, 29–31 May 2012; pp. 20–26. [Google Scholar]
- Wang, D.; Zhao, Q. A simultaneous optimization model for airport network slot allocation under uncertain capacity. Sustainability 2020, 12, 5512. [Google Scholar] [CrossRef]
- Agogino, A.; Rios, J. Robustness of two air traffic scheduling approaches to departure uncertainty. In Proceedings of the 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 16–20 October 2011; pp. 2C6-1–2C6-8. [Google Scholar]
- Brucker, P.; Drexl, A.; Möhring, R.; Neumann, K.; Pesch, E. Resource-constrained project scheduling: Notation, classification, models, and methods. Eur. J. Oper. Res. 1999, 112, 3–41. [Google Scholar] [CrossRef]
- Burke, E.; Jackson, K.; Kingston, J.H.; Weare, R. Automated university timetabling: The state of the art. Comput. J. 1997, 40, 565–571. [Google Scholar] [CrossRef]
- Burke, E.K.; Petrovic, S.; Qu, R. Case-based heuristic selection for timetabling problems. J. Sched. 2006, 9, 115–132. [Google Scholar] [CrossRef]
- Zografos, K.G.; Salouras, Y.; Madas, M.A. Dealing with the efficient allocation of scarce resources at congested airports. Transp. Res. Part C Emerg. Technol. 2012, 21, 244–256. [Google Scholar] [CrossRef]
- Androutsopoulos, K.N.; Madas, M.A. Being fair or efficient? A fairness-driven modeling extension to the strategic airport slot scheduling problem. Transp. Res. Part E Logist. Transp. Rev. 2019, 130, 37–60. [Google Scholar] [CrossRef]
- Jiang, Y.; Zografos, K.G. A decision making framework for incorporating fairness in allocating slots at capacity-constrained airports. Transp. Res. Part C Emerg. Technol. 2021, 126, 103039. [Google Scholar] [CrossRef]
- Ribeiro, N.A.; Jacquillat, A.; Antunes, A.P.; Odoni, A.R.; Pita, J.P. An optimization approach for airport slot allocation under IATA guidelines. Transp. Res. Part B Methodol. 2018, 112, 132–156. [Google Scholar] [CrossRef]
- Fairbrother, J.; Zografos, K.G.; Glazebrook, K.D. A slot-scheduling mechanism at congested airports that incorporates efficiency, fairness, and airline preferences. Transp. Sci. 2020, 54, 115–138. [Google Scholar] [CrossRef]
- Castelli, L.; Pellegrini, P.; Pesenti, R. Airport slot allocation in Europe: Economic efficiency and fairness. Int. J. Revenue Manag. 2012, 6, 28–44. [Google Scholar] [CrossRef]
- Xia, J.-Y.; Li, S.; Huang, J.-J.; Yang, Z.; Jaimoukha, I.M.; Gündüz, D. Metalearning-Based Alternating Minimization Algorithm for Nonconvex Optimization. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 5366–5380. [Google Scholar] [CrossRef] [PubMed]
- Yang, R.-S.; Li, H.-B.; Huang, H.-Z. Multisource information fusion considering the weight of focal element’s beliefs: A Gaussian kernel similarity approach. Meas. Sci. Technol. 2024, 35, 025136. [Google Scholar] [CrossRef]
- Wei, M.; Yang, S.; Wu, W.; Sun, B. A Multi-Objective Fuzzy Optimization Model for Multi-Type Aircraft Flight Scheduling Problem. Transport 2024, 39, 313–322. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set: | |
| Set of airports | |
| Set of waypoints | |
| Set of flights leaving from airport | |
| Set of flights passing though waypoint | |
| Set of routes between airport and waypoint | |
| Index: | |
| Airport | |
| Flight | |
| Waypoint | |
| Route | |
| Index: | |
| Length of route between airport and waypoint | |
| The carbon emission per hour of flight | |
| The speed of flight | |
| The planned departure time of flight | |
| The maximum delay time for each flight | |
| The safe departure intervals for two aircrafts at any airport | |
| The safety flighting intervals of two aircrafts at any waypoint | |
| The control time window of any airport | |
| The control time window of any waypoint | |
| A relatively large fixed value | |
| Parameter: | |
| Whether flight is assigned route | |
| The actual arrival time of flight k passing through the waypoint | |
| The actual departure time of flight |
| Airport | Waypoint | Number of Flights |
|---|---|---|
| ZBAA | P52 | 36 |
| VAGBI | 21 | |
| EKEAT | 3 | |
| ZBAD | P52 | 29 |
| VAGBI | 20 | |
| EKEAT | 1 | |
| ZBTJ | P52 | 6 |
| VAGBI | 11 | |
| EKEAT | 8 | |
| ZBSJ | P52 | 3 |
| VAGBI | 11 | |
| EKEAT | 12 |
| Flight | Airport | Planned Departure Time and Delays | Waypoint | Assigned Route | Actual Arrive Time | Total Carbon Emissions (kg) |
|---|---|---|---|---|---|---|
| 1 | ZBAA | 7:00 (0 min) | P52 | 2 | 7:17 | 354.4 (0) |
| 2 | ZBAD | 7:00 (2 min) | P52 | 2 | 7:22 | 472.5 (−118.1) |
| 3 | ZBAA | 7:00 (4 min) | P52 | 1 | 7:19 | 354.3 (0) |
| 4 | ZBAD | 7:00 (10 min) | VAGBI | 2 | 7:35 | 590.6 (−118.1) |
| 5 | ZBAA | 7:00 (10 min) | VAGBI | 2 | 7:39 | 472.5 (−118.1) |
| 6 | ZBAD | 7:00 (14 min) | VAGBI | 2 | 7:39 | 590.6 (−118.1) |
| 7 | ZBAA | 7:00 (17 min) | VAGBI | 1 | 7:42 | 590.6 (0) |
| 8 | ZBAD | 7:00 (20 min) | VAGBI | 2 | 7:45 | 590.6 (−114.1) |
| 9 | ZBAA | 7:00 (23 min) | VAGBI | 1 | 7:48 | 590.6 (0) |
| 10 | ZBAA | 7:00 (31 min) | VAGBI | 2 | 7:51 | 472.5 (−115.1) |
| … | … | … | … | … | … | |
| 160 | ZBSJ | 8:50 (172 min) | EKEAT | 2 | 12:10 | 472.5 (0) |
| Scenarios | CVaR | ||
|---|---|---|---|
| 1.1 | 83,512.3 kg | 11,432 min | |
| 1.2 | 84,813.7 kg | 11,397 min | |
| 1.3 | 85,314.4 kg | 11,421 min |
| Scenarios | ||
|---|---|---|
| = 1 min | 86,420.2 kg | 8486 min |
| = 2 min | 86,538.3 kg | 8747 min |
| = 3 min | 84,813.7 kg | 11,397 min |
| Scenarios | ||
|---|---|---|
| = 1 min | 84,530.2 kg | 8893 min |
| = 2 min | 84,813.7 kg | 11,397 min |
| = 3 min | 85,522.57 kg | 15,046 min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cong, W.; Zhao, Z.; Wei, M.; Liu, H. A Stochastic Optimization Model for Multi-Airport Flight Cooperative Scheduling Considering CvaR of Both Travel and Departure Time. Aerospace 2025, 12, 631. https://doi.org/10.3390/aerospace12070631
Cong W, Zhao Z, Wei M, Liu H. A Stochastic Optimization Model for Multi-Airport Flight Cooperative Scheduling Considering CvaR of Both Travel and Departure Time. Aerospace. 2025; 12(7):631. https://doi.org/10.3390/aerospace12070631
Chicago/Turabian StyleCong, Wei, Zheng Zhao, Ming Wei, and Huan Liu. 2025. "A Stochastic Optimization Model for Multi-Airport Flight Cooperative Scheduling Considering CvaR of Both Travel and Departure Time" Aerospace 12, no. 7: 631. https://doi.org/10.3390/aerospace12070631
APA StyleCong, W., Zhao, Z., Wei, M., & Liu, H. (2025). A Stochastic Optimization Model for Multi-Airport Flight Cooperative Scheduling Considering CvaR of Both Travel and Departure Time. Aerospace, 12(7), 631. https://doi.org/10.3390/aerospace12070631