
Inter-Laboratory Characterisation of a Low-Power Channel-Less Hall-Effect Thruster: Performance Comparisons and Lessons Learnt


Abstract
1. Introduction
The Role of the Ground-Testing Facility
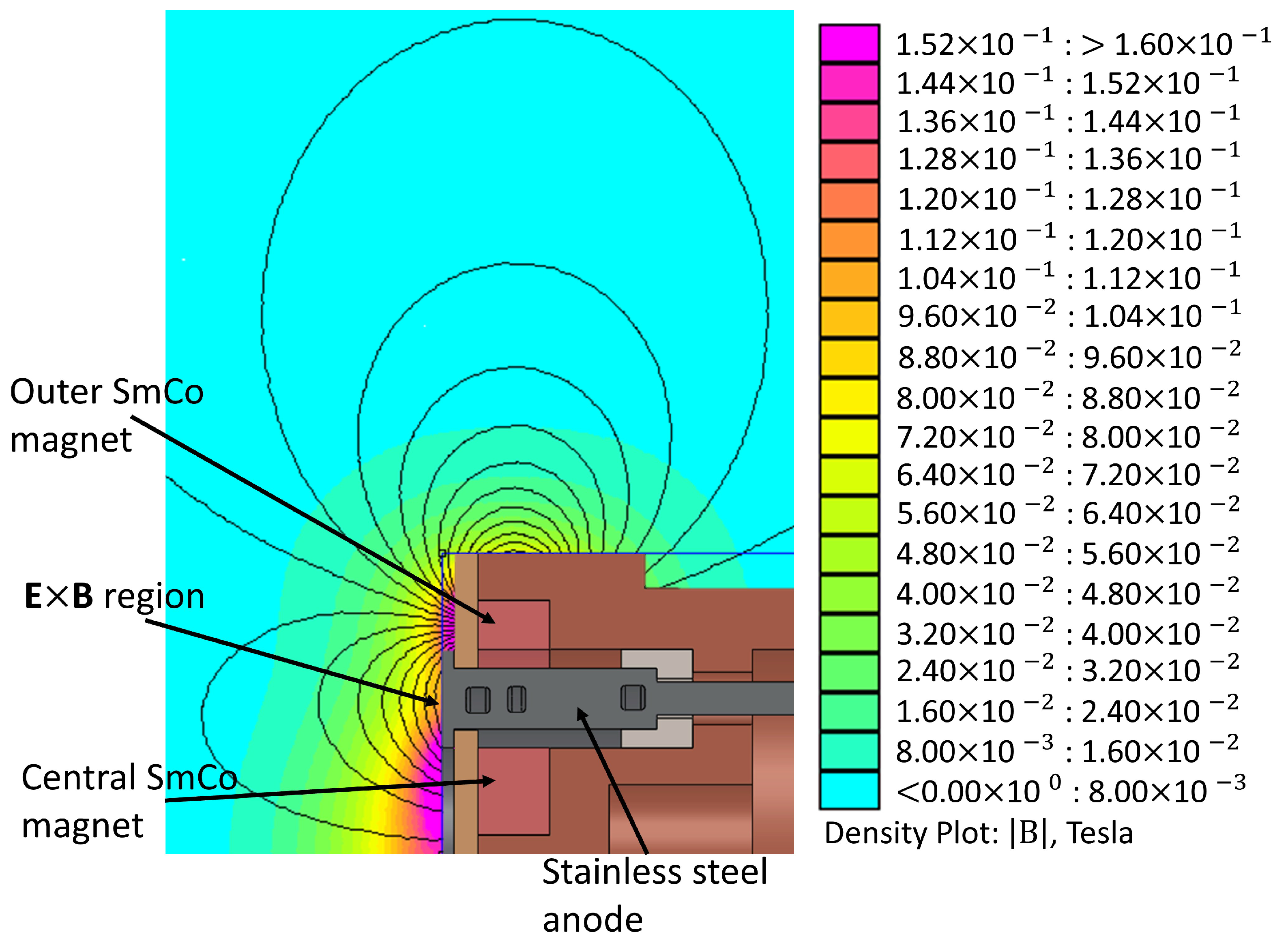
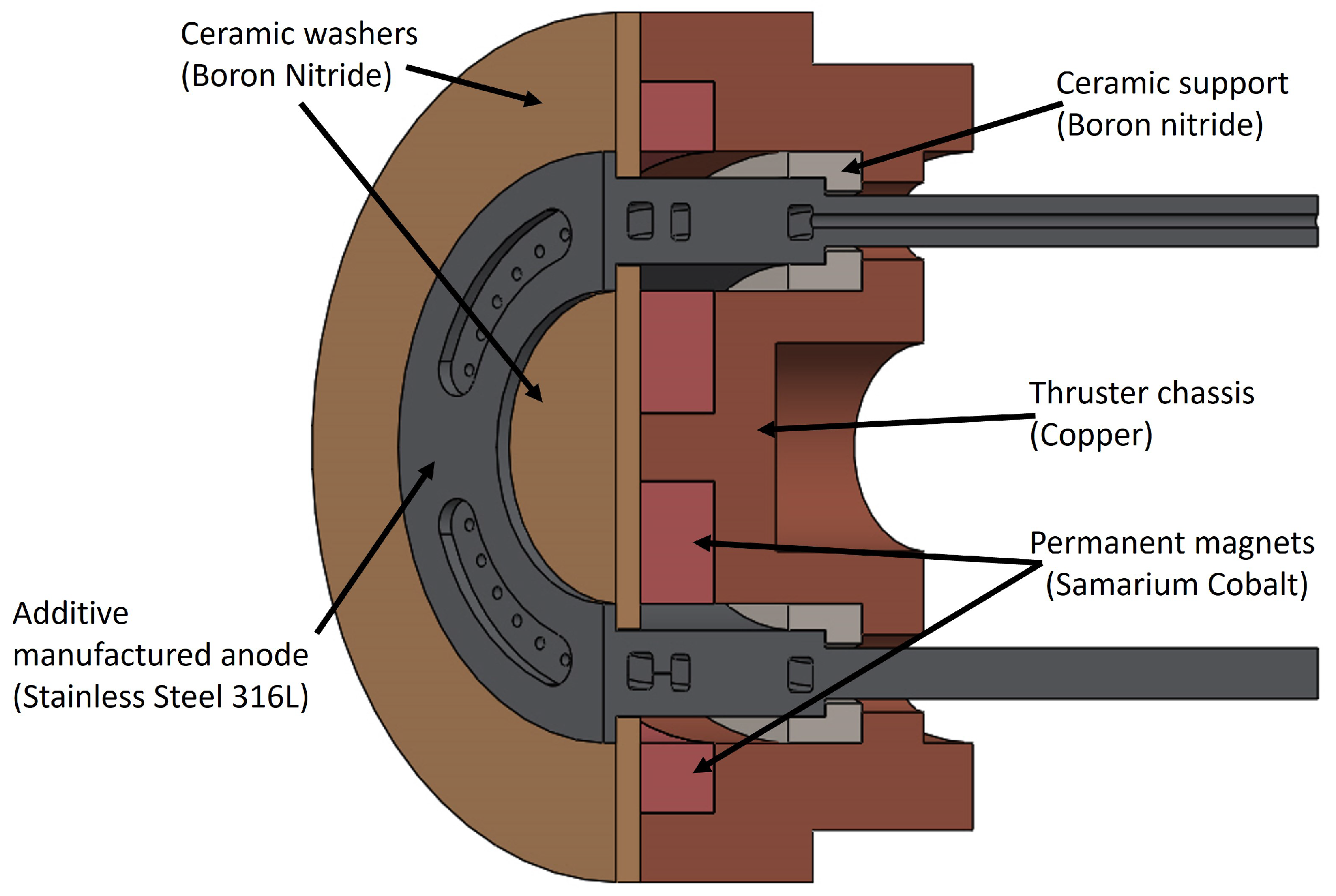
2. Development of the External Discharge Plasma Thruster
3. Experimental Set-Up
3.1. Modular Hollow Cathode Neutraliser
3.2. Experimental Facilities
3.2.1. University of Surrey’s Facility
3.2.2. University of Southampton’s Facility
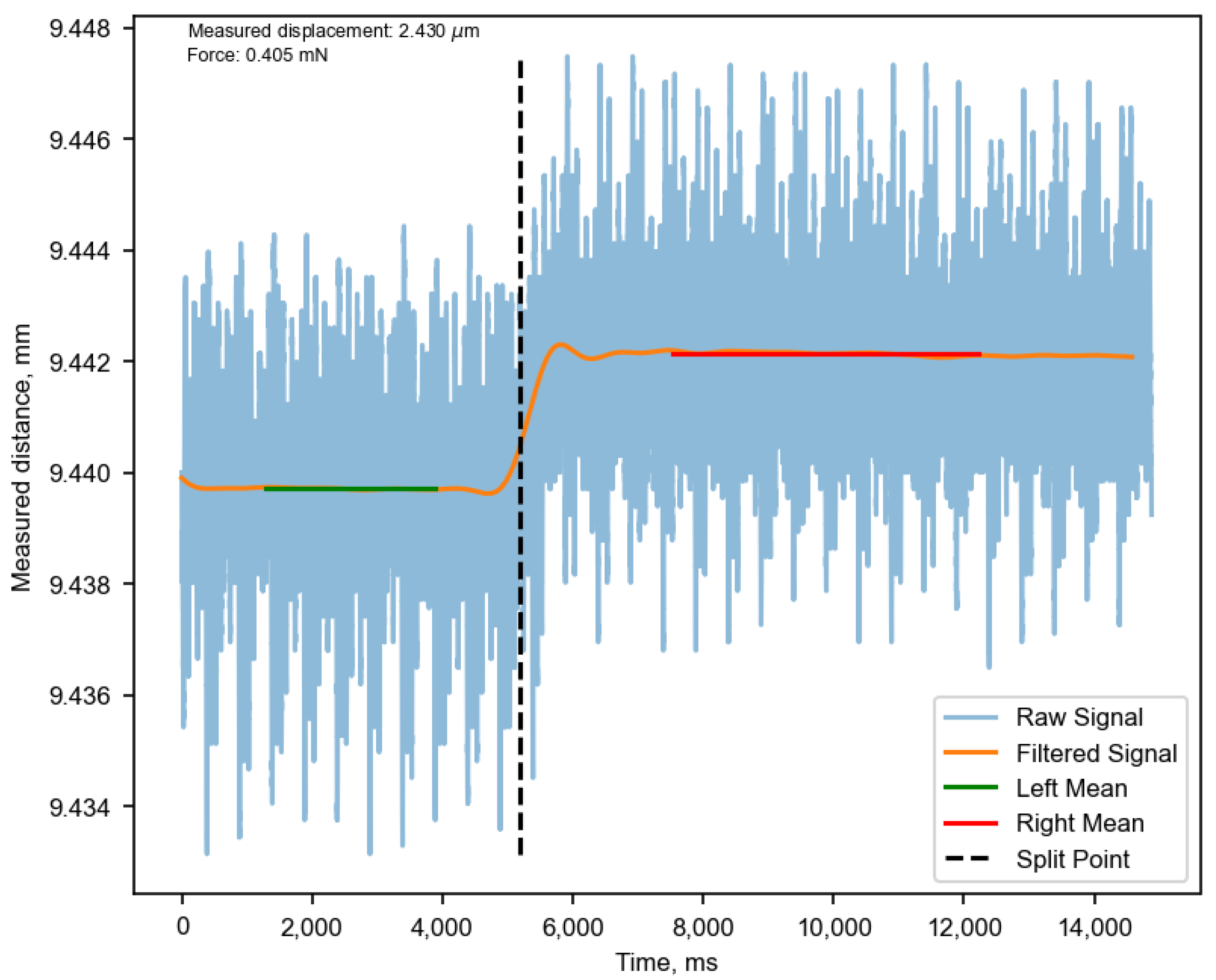
3.3. Thrust Balances
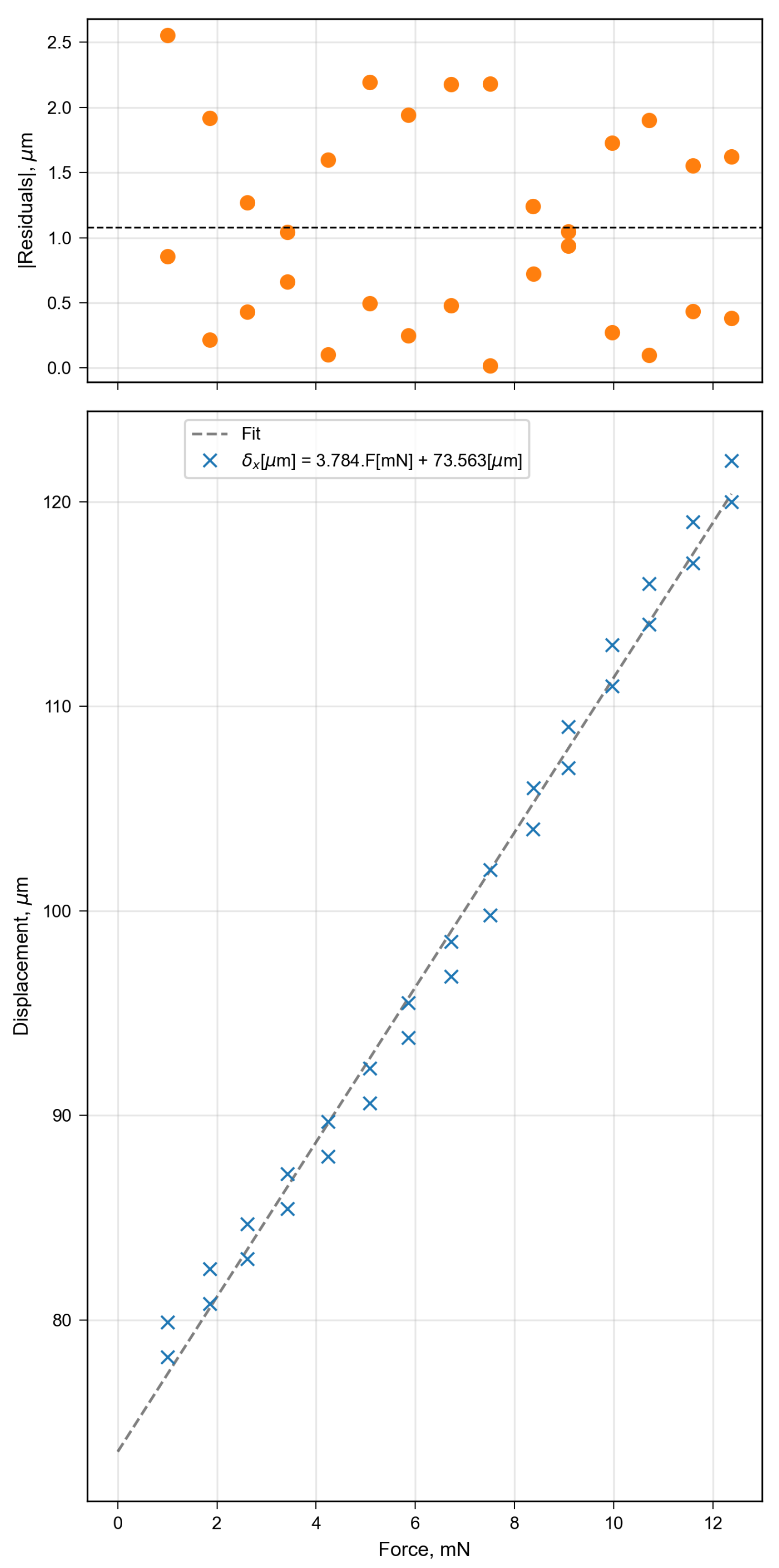
3.3.1. Calibration Coefficients
3.3.2. Quantification of Calibration Coefficients
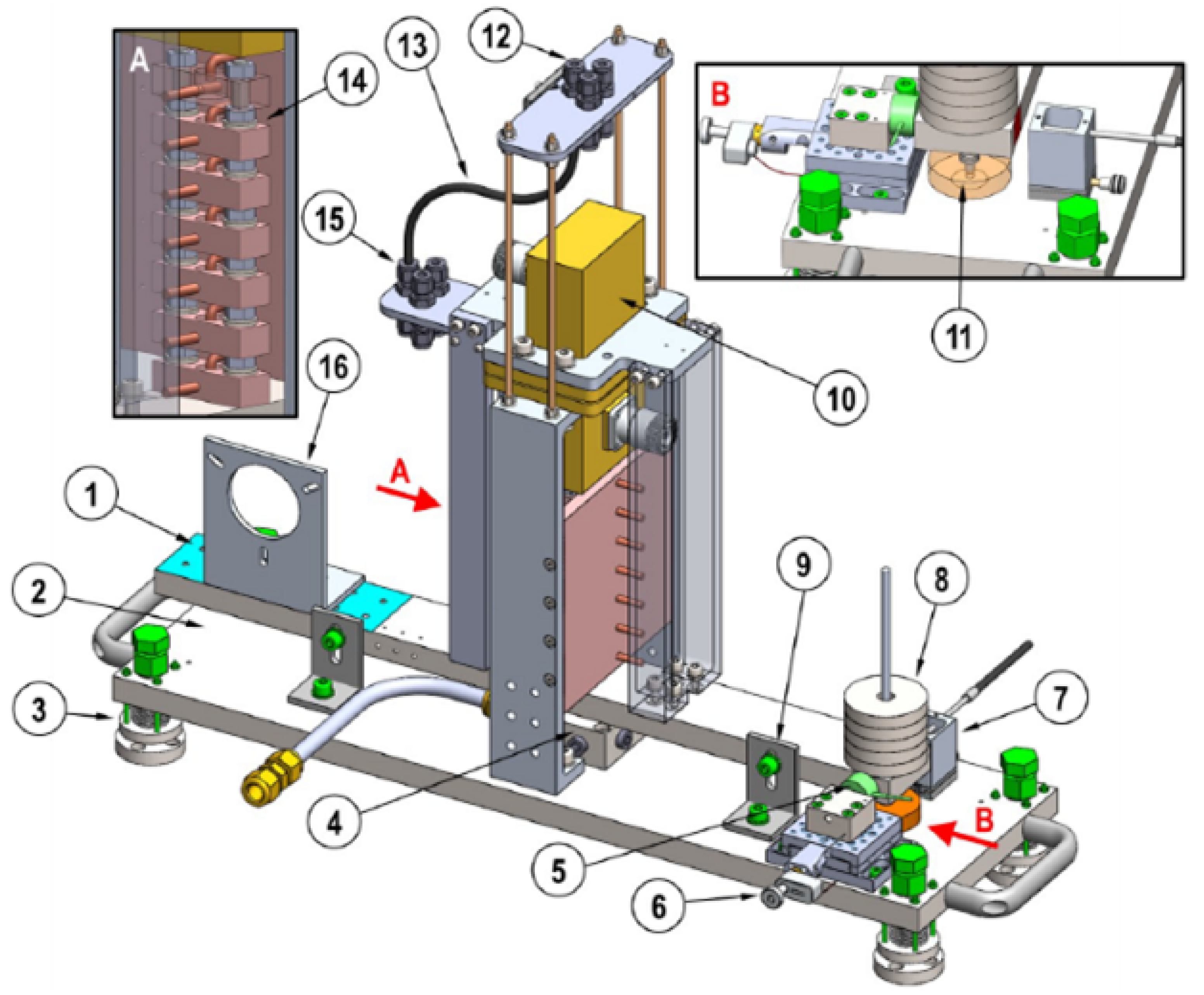
3.3.3. University of Surrey: Torsional Thrust Stand
3.3.4. University of Southampton: Inverted Thrust Stand
3.3.5. Comparison of Calibration Results
3.4. Mapping the Ion Flux Using a Faraday Probe
4. Experimental Characterisation
4.1. University of Surrey Testing
4.2. University of Southampton Testing
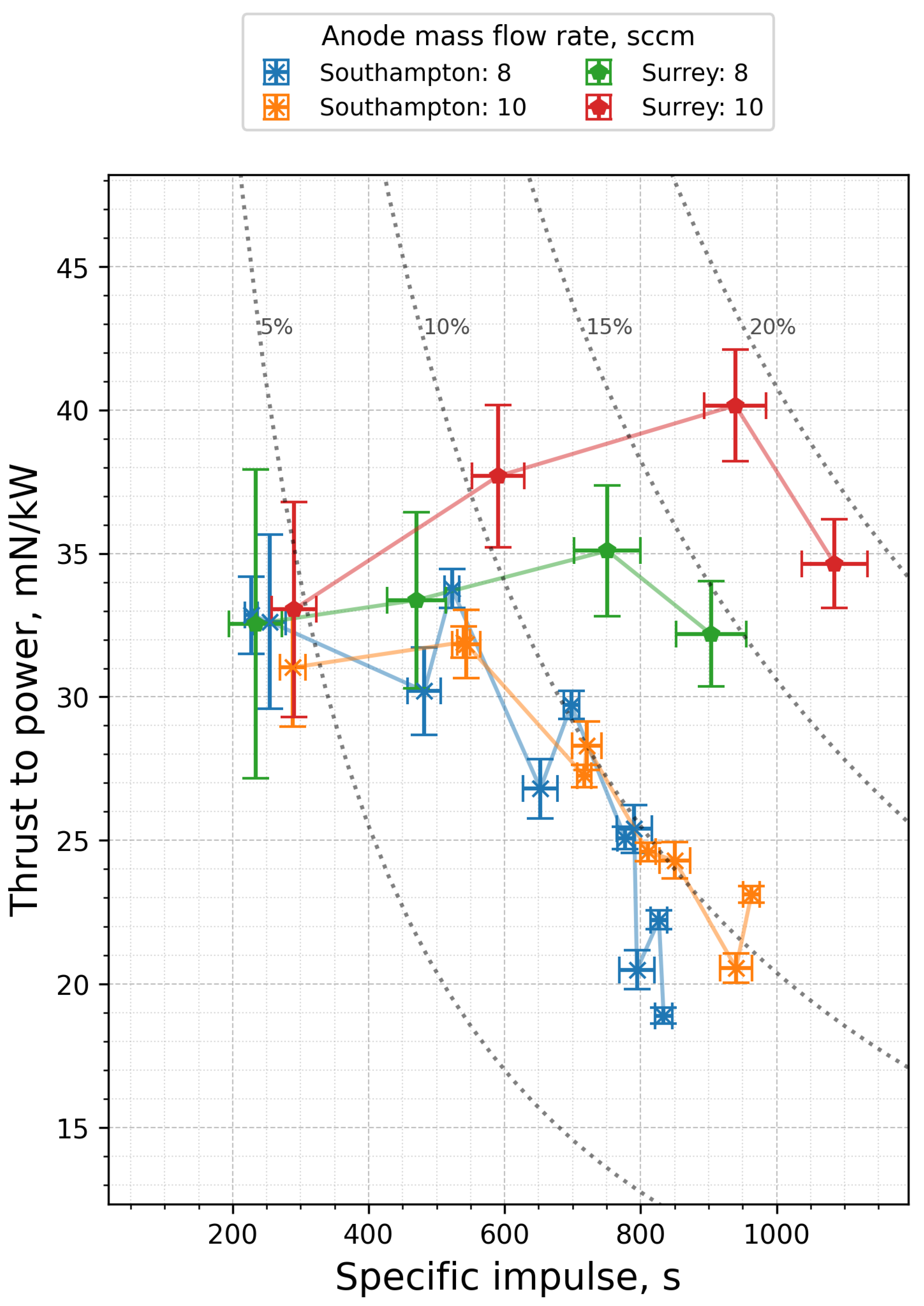
4.3. Direct Cross-Facility Comparison
4.4. Discussion
- How do ground-testing facility parameters—such as chamber size, pumping capacity, and pump configuration—influence the performance of a channel-less thruster?
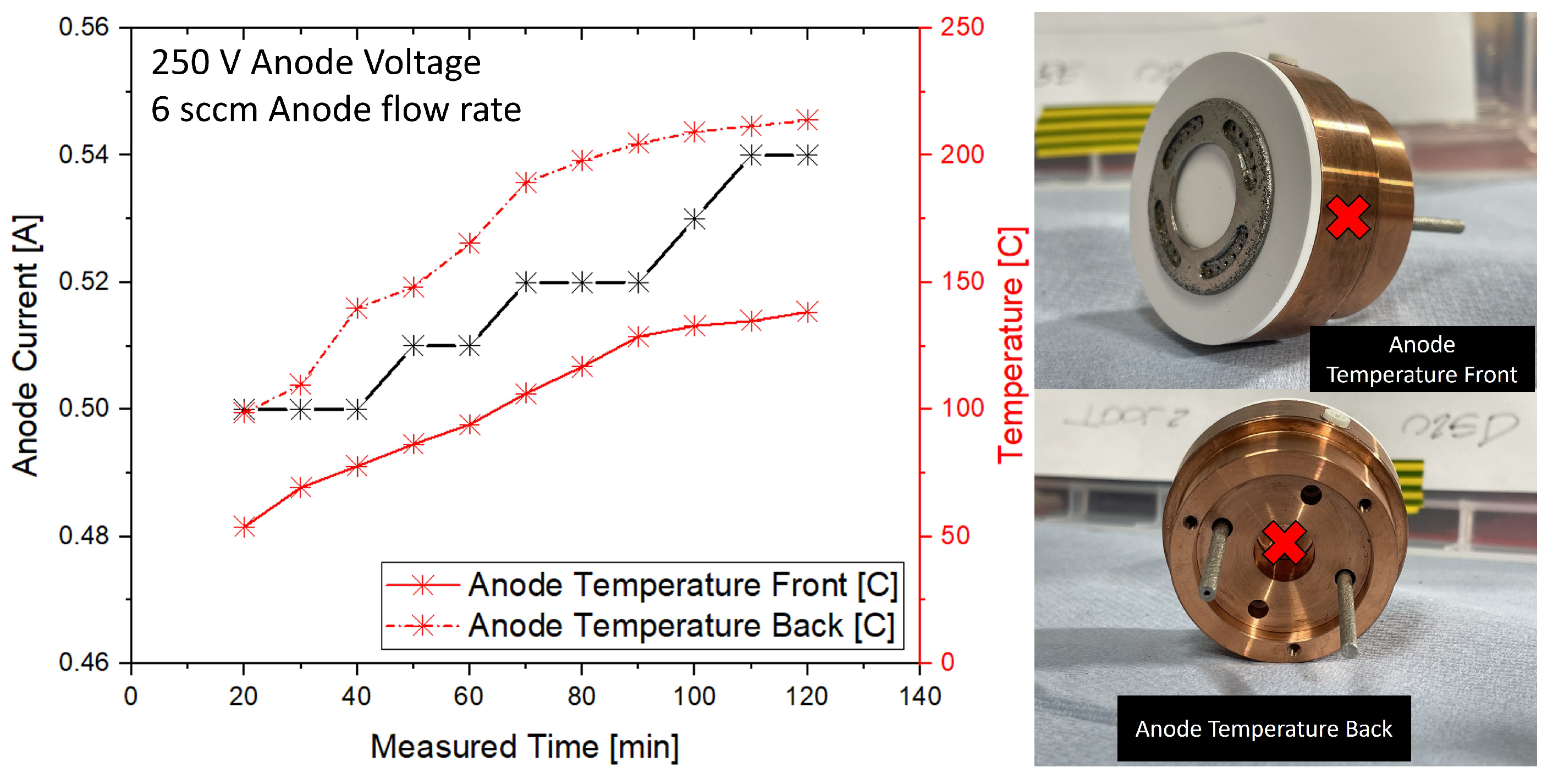
- What role do thermal effects play in the operation of a miniaturised channel-less plasma thruster?
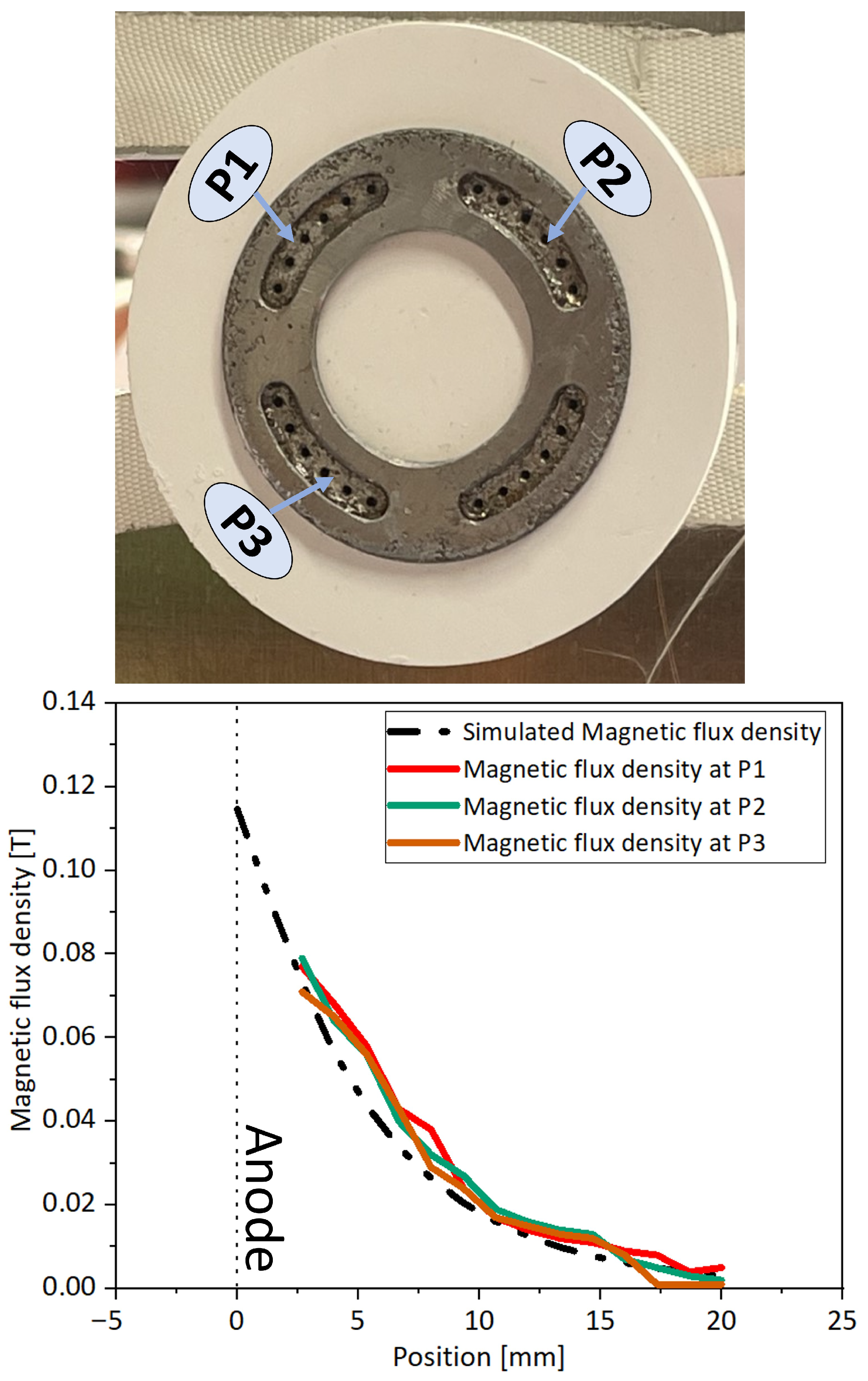
The Effects Caused by the Extended Operation on the Magnetic Circuit
5. Conclusions
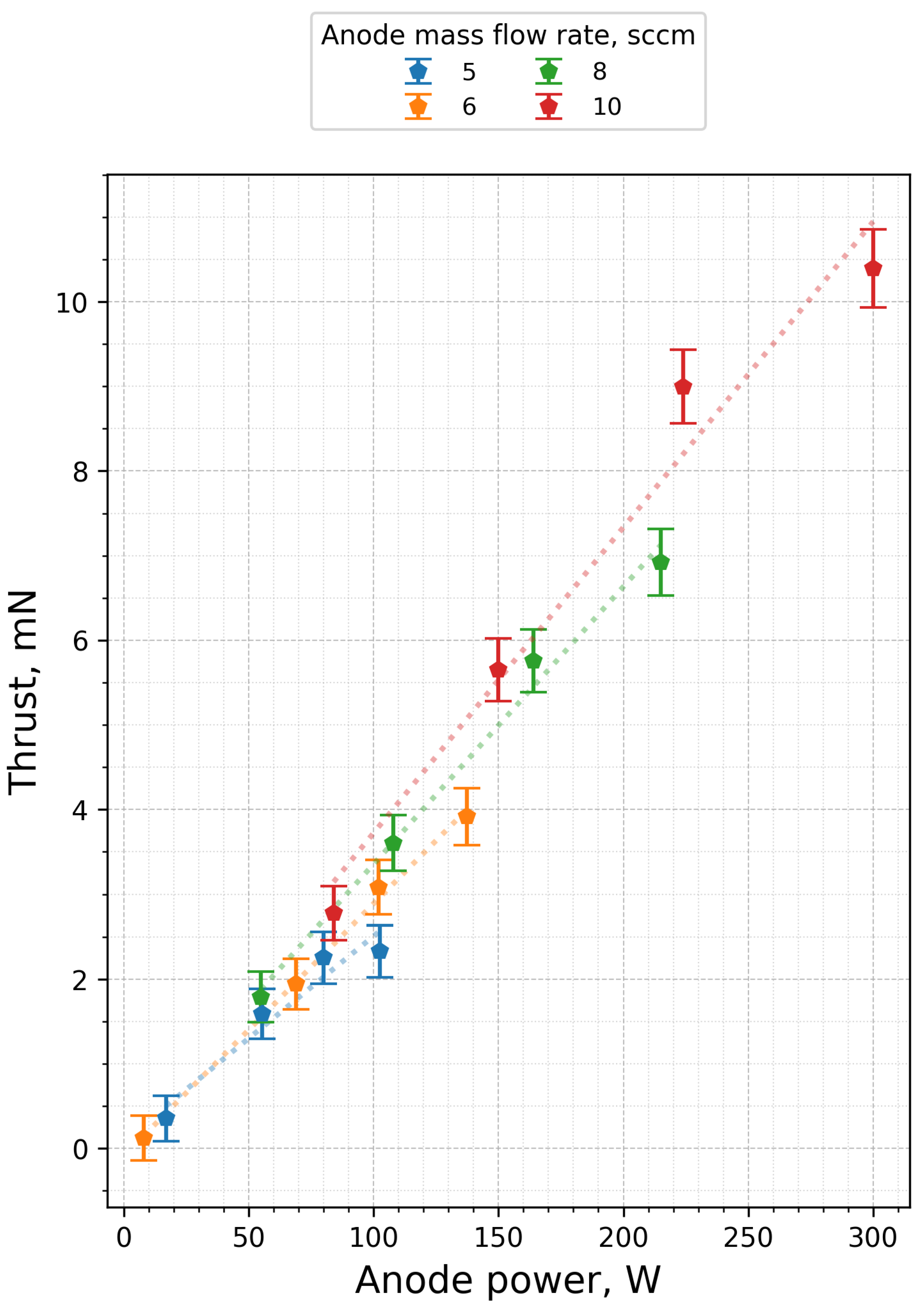
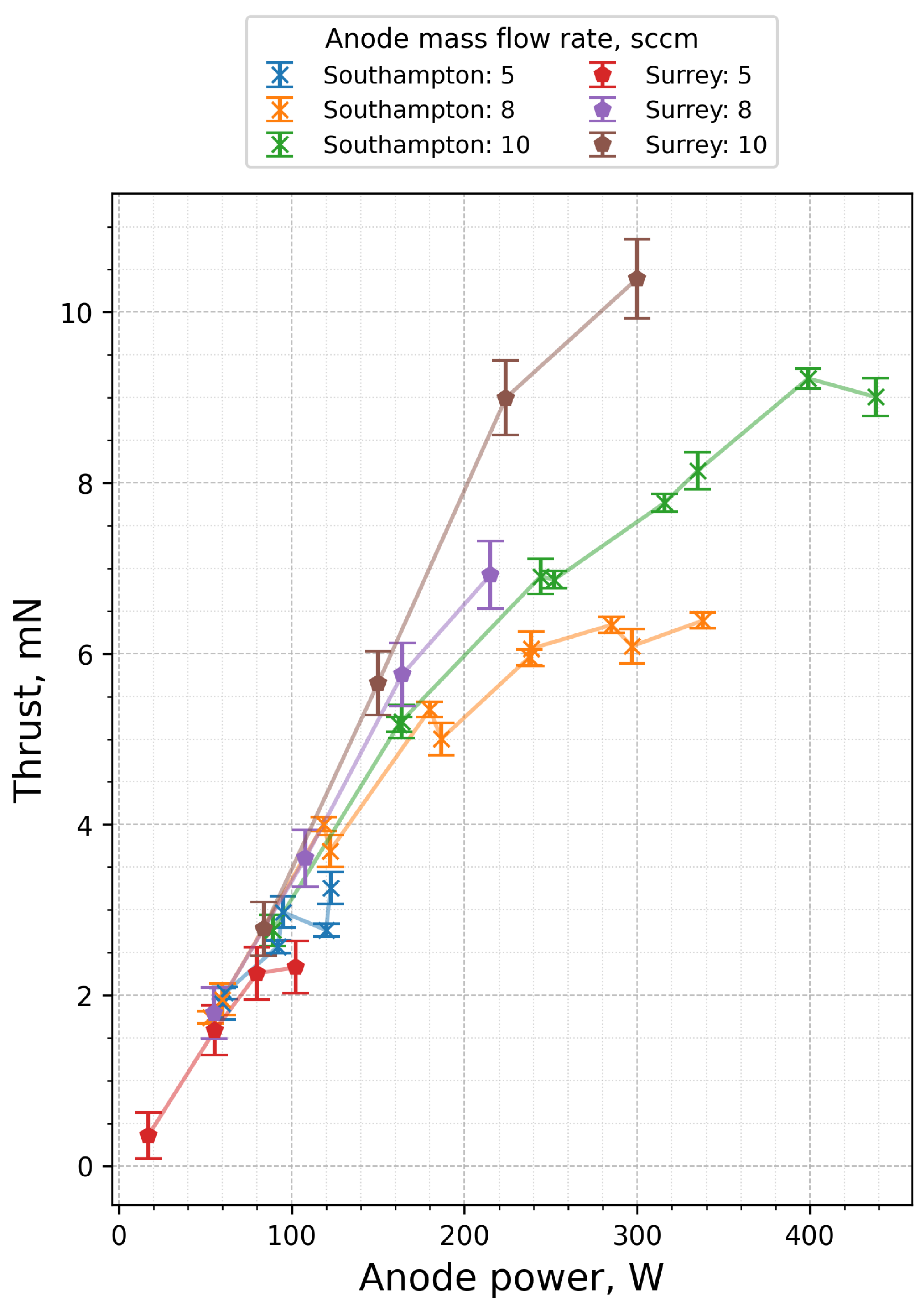
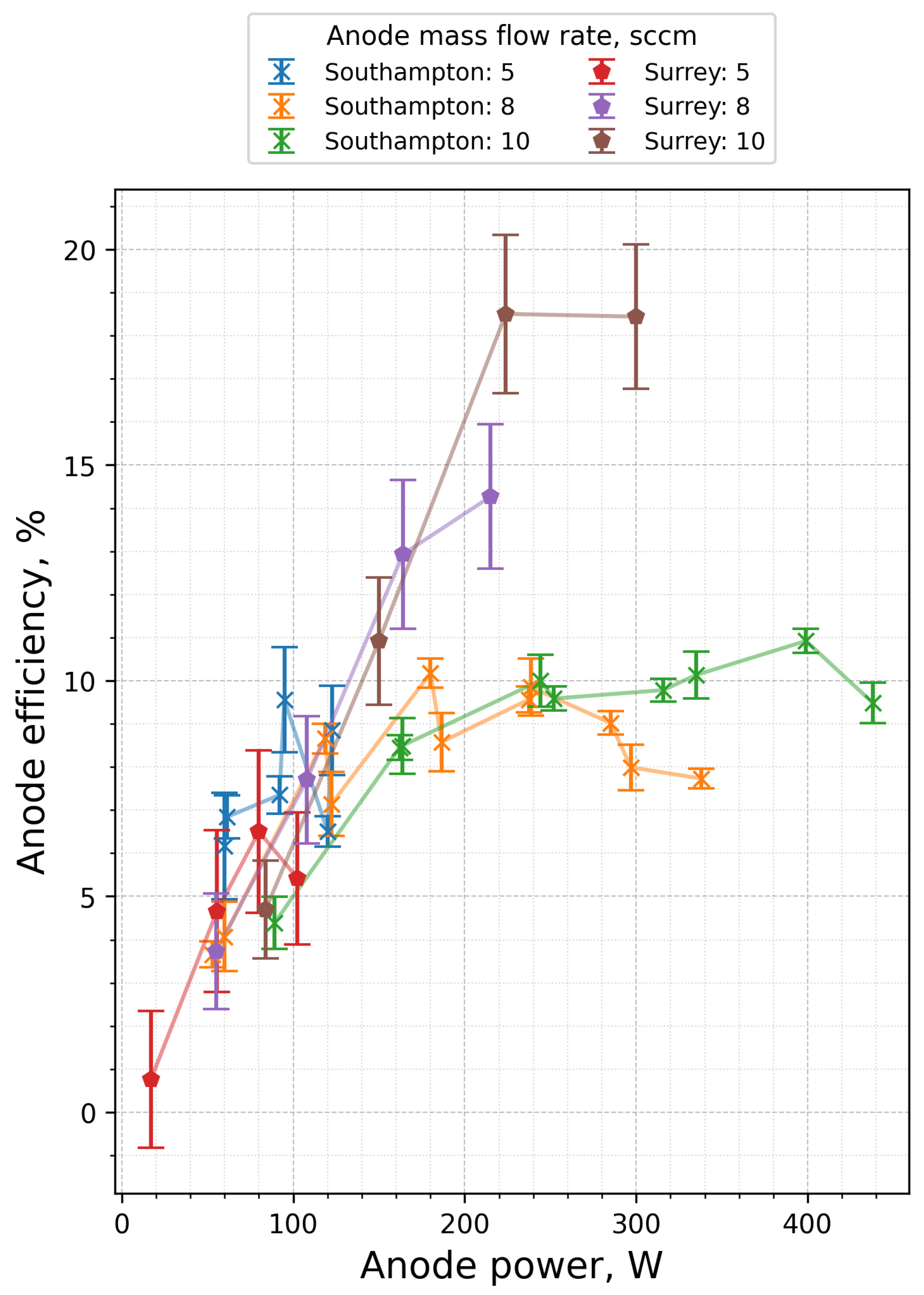
- At the University of Surrey, the XPT achieved a maximum thrust of 10.47 mN and a peak anode efficiency of 18% at 300 W of anode power. At Southampton, the thruster operated over a higher power range, reaching a peak thrust of 11.8 mN at 550 W, but it exhibited a performance plateau beyond a 250 V anode voltage. This plateau suggests near-complete utilisation of the ionisable propellant, limiting further thrust gains. The experimental results demonstrate that the XPT’s performance is sensitive to test facility conditions, especially at higher anode mass fluxes and discharge powers. While the trends in thrust and efficiency were consistent at lower power levels, discrepancies between the two facilities became pronounced above 200 W and 8 sccm.
- Anode overheating and deformation were observed at the highest power levels, underscoring the necessity for improved thermal management in future XPT designs. Performance scaled positively with increasing mass flux, indicating that the thruster’s compact size is not a limiting factor for channel-less plasma thrusters. However, material limitations pose a significant challenge; higher mass flux and thrust values caused plasma heating that increased the anode temperature, leading to partial demagnetisation of permanent magnets and deformation of the stainless steel anode due to electron hot spots.
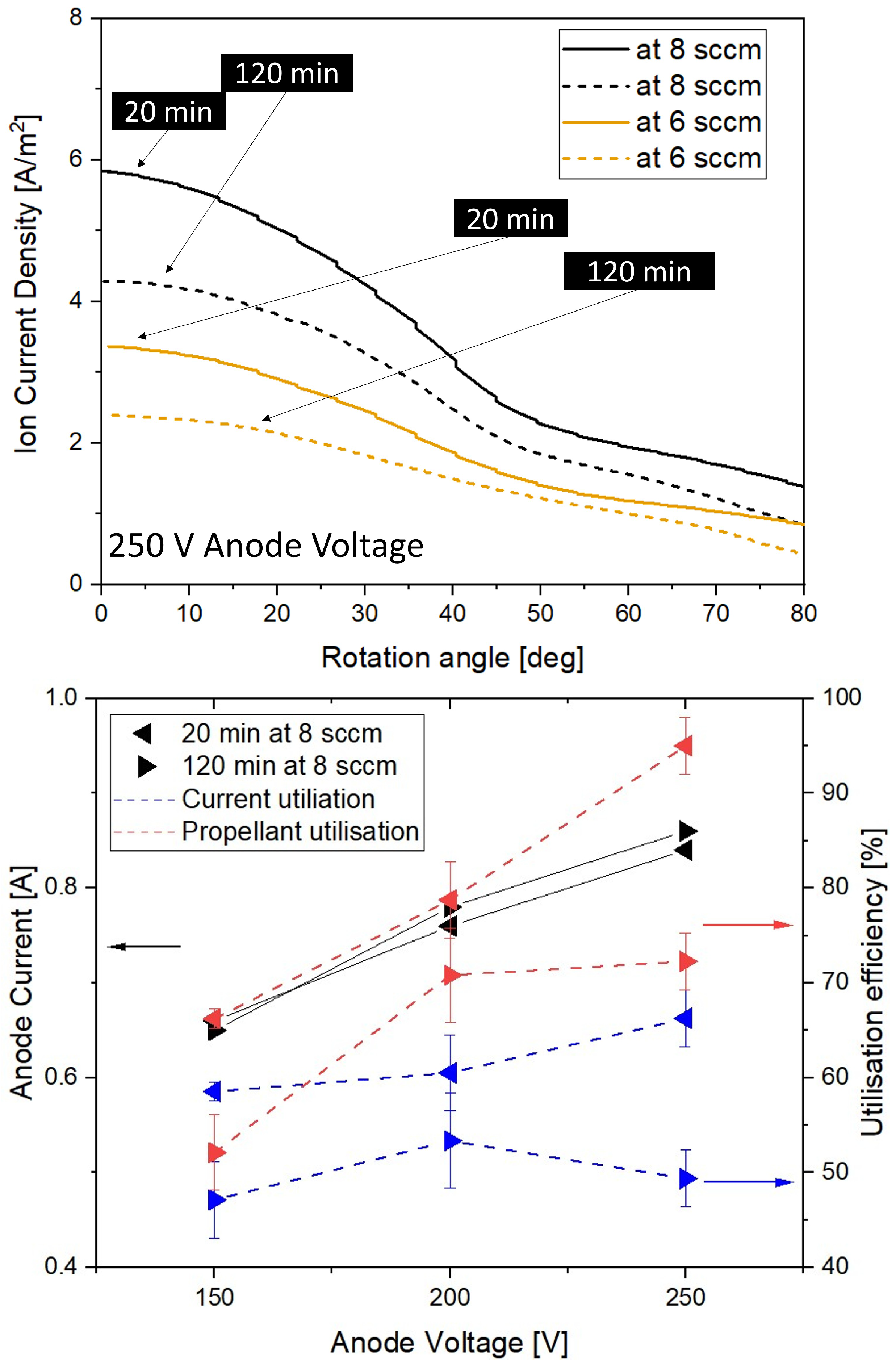
- A continuous operation study lasting 120 min examined the thermal effects on the thruster’s magnetic circuit. A Faraday probe mapped the ion beam and quantified performance changes over time. The ion current density decreased by up to 30% at the 6 sccm and 8 sccm xenon flow rates during extended operation. Unlike annular Hall thrusters, where coaxial channels shield magnets, the miniaturised XPT utilizes its entire surface area for thrust generation, increasing susceptibility to thermal degradation. The increase in electron current during continuous operation was attributed to thermal weakening of the magnetic field and elevated anode temperatures increasing the neutral velocity. Nonetheless, relatively good propellant utilisation, due to a short ionisation region, suggests that with further development, channel-less plasma thrusters can achieve effective and durable operation.
- The characterisation indicates an optimal operational range of about 200 W of anode power for this miniaturised XPT. While active cooling is feasible in laboratory settings, it is impractical for spaceflight applications. Therefore, fundamental redesigns are required, such as separating propellant injection from the anode, to reduce thermal stress and extend the thruster life. This inter-facility comparison highlights the importance of accounting for facility effects—including vacuum chamber pumping, measurement methods, and test durations—when evaluating novel electric propulsion devices. It also underscores the critical role of inter-laboratory validation to ensure accurate and reliable performance assessments of emerging propulsion technologies.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yeo, S.H.; Ogawa, H.; Kahnfeld, D.; Schneider, R. Miniaturization perspectives of electrostatic propulsion for small spacecraft platforms. Prog. Aerosp. Sci. 2021, 126, 100742. [Google Scholar] [CrossRef]
- Dannenmayer, K.; Mazouffre, S. Elementary Scaling Relations for Hall Effect Thrusters. J. Propuls. Power 2011, 27, 236–245. [Google Scholar] [CrossRef]
- Marianacci, A.; Mazouffre, S. Supervised machine learning-based Hall thruster scaling. J. Electr. Propuls. 2024, 3, 14. [Google Scholar] [CrossRef]
- Ahedo, E.; Gallardo, J.M.; Martinez-Sanchez, M. Effects of the radial plasma-wall interaction on the Hall thruster discharge. Phys. Plasmas 2003, 10, 3397–3409. [Google Scholar] [CrossRef]
- Mazouffre, S.; Dannenmayer, K.; Pérez-Luna, J. Examination of plasma-wall interactions in Hall effect thrusters by means of calibrated thermal imaging. J. Appl. Phys. 2007, 102, 023304. [Google Scholar] [CrossRef]
- Semenkin, A.V. Investigation of Erosion in Anode Layer Thruster and Elaboration High Life Design Scheme. In Proceedings of the International Electric Propulsion Conference, Seattle, WA, USA, 13–16 September 1993; Volume 23. [Google Scholar]
- Kapulkin, A.; Grishkevich, A.D.; Prinsyakov, V. Outside Electric Field Thruster. Space Technol. 1995, 15, 391–394. [Google Scholar] [CrossRef]
- Mazouffre, S.; Tsikata, S.; Vaudolon, J. Development and experimental characterization of a wall-less Hall thruster. J. Appl. Phys. 2014, 116, 243302. [Google Scholar] [CrossRef]
- Ding, Y.; Peng, W.; Sun, H.; Wei, L. Performance characteristics of No-Wall-Losses Hall Thruster. Eur. Phys. J. 2017, 226, 2945–2953. [Google Scholar] [CrossRef]
- Karadag, B.; Cho, S.; Funaki, I.; Hamada, Y.; Komurasaki, K. External Discharge Plasma Thruster. J. Propuls. Power 2018, 34, 1094–1096. [Google Scholar] [CrossRef]
- Simmonds, J.; Raitses, Y. Ion acceleration in a wall-less Hall thruster. J. Appl. Phys. 2021, 130, 093302. [Google Scholar] [CrossRef]
- Simmonds, J.; Raitses, Y. Mitigation of breathing oscillations and focusing of the plume in a segmented electrode wall-less Hall thruster. Appl. Phys. Lett. 2021, 119, 213501. [Google Scholar] [CrossRef]
- Hamo, O.; Lev, D.R.; Rubanovich, M.; Kapulkin, A.; Lefkowitz, J. Experimental investigation of an external discharge very low anode power (≪20 W) hall thruster. J. Electr. Propuls. 2022, 1, 112820. [Google Scholar] [CrossRef]
- Ren, L.; Wang, Y.; Jin, L.; Zhou, K.; Fu, Y.; Sun, A.; Ding, W. Effect of radial scaling down on the performance of low-power external discharge plasma thrusters. Vacuum 2023, 216, 112460. [Google Scholar] [CrossRef]
- MacDonald-Tenenbaum, N.; Pratt, Q.; Nakles, M.; Pilgram, N.; Holmes, M.; Hargus, W. Background Pressure Effects on Ion Velocity Distributions in an SPT-100 Hall Thruster. J. Propuls. Power 2019, 35, 403–412. [Google Scholar] [CrossRef]
- Walker, M.L.R. Effects of Facility Backpressure on the Performance and Plume of a Hall Thruster. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2005. [Google Scholar]
- Jovel, D.R.; Cabrera, J.D.; Walker, M.L. Current pathways model for hall thruster plumes in ground-based vacuum test facilities: Measurements and observations. J. Electr. Propuls. 2024, 3, 35. [Google Scholar] [CrossRef]
- Zhou, J.; Modesti, A.; Ahedo, E. Analysis of the facility effects on the plume expansion of a low power Hall effect thruster. In Proceedings of the 38th International Electric Propulsion Conference, Toulouse, France, 23–28 June 2024. [Google Scholar]
- Huang, W.; Gilland, J.H.; Herman, D.; Mullins, C.; Hohman, K. A Facility Effect Characterization Test of the BHT-6000 Hall Thruster. In Proceedings of the AIAA SCITECH 2024 Forum, Orlando, FL, USA, 8–12 January 2024; p. 2366. [Google Scholar]
- Karadag, B. External Discharge Plasma Thruster. Ph.D. Thesis, Department of Space and Astronautical Science, The Graduate University for Advanced Studies, Kanagawa, Japan, 2018. [Google Scholar]
- Karadag, B.; Cho, S.; Oshio, Y.; Hamada, Y.; Funaki, I.; Komurasaki, K. Preliminary Investigation of an External Discharge Plasma Thruster. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UH, USA, 25–27 July 2016. [Google Scholar] [CrossRef]
- Ahmed, M.; Karadag, B.; Masillo, S.; Lucca Fabris, A. Development of a modular hollow cathode for ground testing of plasma thrusters. Vacuum 2024, 219, 112653. [Google Scholar] [CrossRef]
- Hofer, R.R.; Peterson, P.Y.; Gallimore, A.D. Characterizing Vacuum Facility Backpressure Effects on the Performance of a Hall Thruster. In Proceedings of the International Electric Propulsion Conference, Ann Arbor, MI, USA, 15–19 October 2001. [Google Scholar]
- Byrne, M.P.; Roberts, P.J.; Jorns, B.A. Coupling of Electrical and Pressure Facility Effects in Hall Effect Thruster Testing. In Proceedings of the 37th International Electric Propulsion Conference, Massachusetts Institute of Technology, Cambridge, MA, USA, 19–23 June 2022. [Google Scholar]
- Diamant, K.; Spektor, R.; Beiting, E.; Young, J.; Curtiss, T. The Effects of Background Pressure on Hall Thruster Operation. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar] [CrossRef]
- Munro-O’Brien, T.F.; Ryan, C.N. Performance of a low power Hall effect thruster with several gaseous propellants. Acta Astronaut. 2023, 206, 257–273. [Google Scholar] [CrossRef]
- Polk, J.E.; Pancotti, A.; Haag, T.; King, S.; Walker, M.; Blakely, J.; Ziemer, J. Recommended practices in thrust measurements. In Proceedings of the 33rd International Electric Propulsion Conference, Washington, DC, USA, 6–10 October 2013; pp. 2013–2440. [Google Scholar]
- Zafran, S.; Kemp, R.F. Colloid microthruster test stand. J. Spacecr. Rocket. 1969, 6, 1144–1147. [Google Scholar] [CrossRef]
- Masillo, S.; Stubbing, J.; Swar, K.; Staab, D.; Garbayo, A.; Lucca Fabris, A. Validation of a torsional balance for thrust measurements of Hall effect and microwave-based space propulsion systems. Rev. Sci. Instruments 2022, 93, 114501. [Google Scholar] [CrossRef]
- Ahmed, M.; Lucca Fabris, A. Plume characterisation of a low power external discharge plasma thruster. In Proceedings of the 38th International Electric Propulsion Conference, Toulouse, France, 23–28 June 2024. [Google Scholar]
- Karadag, B.; Cho, S.; Funaki, I. Thrust performance, propellant ionization, and thruster erosion of an external discharge plasma thruster. J. Appl. Phys. 2018, 123, 153302. [Google Scholar] [CrossRef]
- Brown, D.L.; Walker, M.L.R.; Szabo, J.; Huang, W.; Foster, J.E. Recommended Practice for Use of Faraday Probes in Electric Propulsion Testing. J. Propuls. Power 2017, 33, 582–613. [Google Scholar] [CrossRef]
- Masillo, S. Experimental Characterisation of a Novel Hall-Type Plasma Thruster for Small Satellite Applications. Ph.D. Thesis, University of Surrey, Guildford, UK, 2023. [Google Scholar]
- Satpathy, D.; Kawabata, S.; Sekine, H.; Kawashima, R.; Komurasaki, K.; Koizumi, H. Investigation of correlation between thrust and anode temperature during transient operation of RAIJIN-66. J. Electr. Propuls. 2023, 2, 5. [Google Scholar] [CrossRef]
- Magnet Sales. SmCo Grades Data Sheet. Available online: https://magnetsales.co.uk/wp-content/uploads/2023/10/MSS-SmCo-Grades-Data-sheet.pdf (accessed on 10 October 2022).
- Simmonds, J. Studies of Thrust Density Limits in Hall Thrusters. Ph.D. Thesis, Princeton University, Princeton, NJ, USA, 2022. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UoSurrey | UoSouthampton | |
|---|---|---|
| Chamber Size | Ø1.5 m × 3 m | Ø2.0 m × 4.5 m |
| Roughing Pumps | E2M2 | LV140C |
| Cryo Pumping | 18,000 L/s | 21,800 L/s |
| Turbo Pumping | N/A | 4200 L/s |
| Total Pumping Speed | 18,000 L/s | 26,000 L/s |
| Base Pressure | mbar | <9 mbar |
| Value | Units | UoSurrey Calibration |
|---|---|---|
| μm/mN | 3.78 | |
| μm | 73.56 | |
| # | 30 | |
| mN | 6.69 | |
| μm | 1.36 | |
| μN | 358.67 | |
| μm/mN | 0.07 | |
| - | 1.86% |
| Value | Units | UoSouthampton Calibration |
|---|---|---|
| μm/mN | 5.48 | |
| μm | 0.41 | |
| # | 28 | |
| mN | 1.56 | |
| μm | 0.45 | |
| μN | 82.94 | |
| μm/mN | 0.06 | |
| - | 1.07% |
| Value | Units | UoSouthampton | UoSurrey |
|---|---|---|---|
| μm/mN | 5.48 | 3.78 | |
| μm | 0.41 | 73.56 * | |
| # | 28 | 30 | |
| mN | 1.56 | 6.69 | |
| μm | 0.45 | 1.35 | |
| μN | 82.95 | 358.67 | |
| μm/mN | 0.058 | 0.071 | |
| - | 1.07% | 1.86% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munro-O’Brien, T.F.; Ahmed, M.; Lucca Fabris, A.; Ryan, C.N. Inter-Laboratory Characterisation of a Low-Power Channel-Less Hall-Effect Thruster: Performance Comparisons and Lessons Learnt. Aerospace 2025, 12, 601. https://doi.org/10.3390/aerospace12070601
Munro-O’Brien TF, Ahmed M, Lucca Fabris A, Ryan CN. Inter-Laboratory Characterisation of a Low-Power Channel-Less Hall-Effect Thruster: Performance Comparisons and Lessons Learnt. Aerospace. 2025; 12(7):601. https://doi.org/10.3390/aerospace12070601
Chicago/Turabian StyleMunro-O’Brien, Thomas F., Mohamed Ahmed, Andrea Lucca Fabris, and Charles N. Ryan. 2025. "Inter-Laboratory Characterisation of a Low-Power Channel-Less Hall-Effect Thruster: Performance Comparisons and Lessons Learnt" Aerospace 12, no. 7: 601. https://doi.org/10.3390/aerospace12070601
APA StyleMunro-O’Brien, T. F., Ahmed, M., Lucca Fabris, A., & Ryan, C. N. (2025). Inter-Laboratory Characterisation of a Low-Power Channel-Less Hall-Effect Thruster: Performance Comparisons and Lessons Learnt. Aerospace, 12(7), 601. https://doi.org/10.3390/aerospace12070601