1. Introduction
The exploration of small celestial bodies is of great significance for exploring the evolution of the solar system, studying the origin of life, protecting the safety of the Earth, and developing extraterrestrial resources [
1]. The early detection methods of small celestial bodies are mainly flyby detection and orbital detection, and the spacecraft will not have direct contact with small celestial bodies. Now, the detection methodologies are progressively evolving toward impact-based, surface-attachment, and sample-return paradigms [
2,
3,
4]. At present, the methods used in the detection and sampling of small celestial bodies are mostly contact and separation [
5]. In the future, the small celestial body detection sampling task will develop in the direction of long-term landing, sampling return, and composite high-reliability sampling. The reliable attachment and stable connection of the detector to the small celestial body, as a prerequisite for successful sampling, will be the focus of research [
6,
7].
Small celestial bodies have complex characteristics, such as a small size, weak gravitational field, irregular shape, rugged surface morphology, and uncertain surface construction and composition [
8]. This poses technical challenges for the long-term attachment and deep sampling of the small celestial body detector: the small size of the small celestial body, the lack of a large flat area on the surface for attachment, and the high accuracy of the attachment position and speed [
2]. The gravitational field of the small celestial body is weak. In the process of sample drilling, the detector cannot rely on its own weight to obtain sufficient adhesion, which is difficult to meet the requirements of the sampling footage force. Due to the uncertainty of the surface morphology and composition of the small celestial body and the lack of prior knowledge, it is impossible to obtain the mechanical properties of the asteroid soil before landing, and adaptability of the attachment mode is highly required [
9]. Traditional attachment sampling methods, such as flying spear, magnetic attraction, cutting, clamping, etc., need a specific surface morphology and geological composition to achieve reliable attachment to small celestial bodies, which is difficult to apply in the presence of uncertainties on the surface of small celestial bodies. As a cutting-edge small body detection sampling scheme, the multi-tethered spacecraft formation encirclement capture technology is different from the traditional attachment sampling method. It can effectively achieve long-term reliable attachment and can carry out deep sampling [
10,
11].
Multi-tethered spacecraft formation [
12,
13] refers to a formation system that uses tethers to connect multiple node-based spacecraft and form a large-scale configuration through tether retraction. The multi-tethered spacecraft formation (MTSF) encircles the capture of small celestial bodies [
10,
14] as an innovative solution for detecting small celestial bodies, with the capture of small celestial bodies realized through the cooperative work of node spacecraft and the control of tether retraction. The persistent and stable attachment of the detector on the surface of the small celestial body is realized through multi-node cooperative anchoring, and deep drilling sampling operations are carried out [
15], as shown in
Figure 1. This method has the following advantages: it utilizes tether binding; reduces energy consumption, achieves long-term reliable attachment; provides greater footage force for deep drilling; solves the problem of sampling being limited to the surface layer in the microgravity environment; provides an effective technical way for deep sampling; and has strong adaptability to different surface morphologies and geological compositions of small celestial bodies. For a detailed description of the multi-tethered spacecraft formation, readers are referred to Reference [
10].
The complex relative dynamics between the node-based spacecraft, the tether, and the small celestial body need to be considered when the MTSF captures the small celestial body. At present, for the dynamic modeling of MTSF, the spacecraft is mostly simplified as a particle, ignoring the tether mass. Reference [
16], based on a virtual structure, used the lumped mass model to calculate the spin angular velocity and realized the deployment of the triangular tethered formation system. In Reference [
17], the dynamic equation of tethered spacecraft in an orbit maneuver was established using the dumbbell model, and a tethered spacecraft system with fixed thrust was studied. In Reference [
18], the motion equation of tethered satellite system was derived by using the absolute nodal coordinate formulation (ANCF). In Reference [
19], the variable length tether and its dynamic equation were described using the absolute nodal coordinate formulation (ANCF) and the D’ Alembert principle. The natural coordinate formulation (NCF) was used to describe the motion of three satellites. The Lagrange multiplier method was used to describe the control dynamics equation of the system, and the influence of the deployment speed and the applied jet force on the deployment dynamics of the tethered system were studied. In Reference [
20], the nonlinear dynamic model of attitude–orbit coupling in a triangular tether formation was derived under the condition of ignoring the mass of the tether and always maintaining the tension state of the tether.
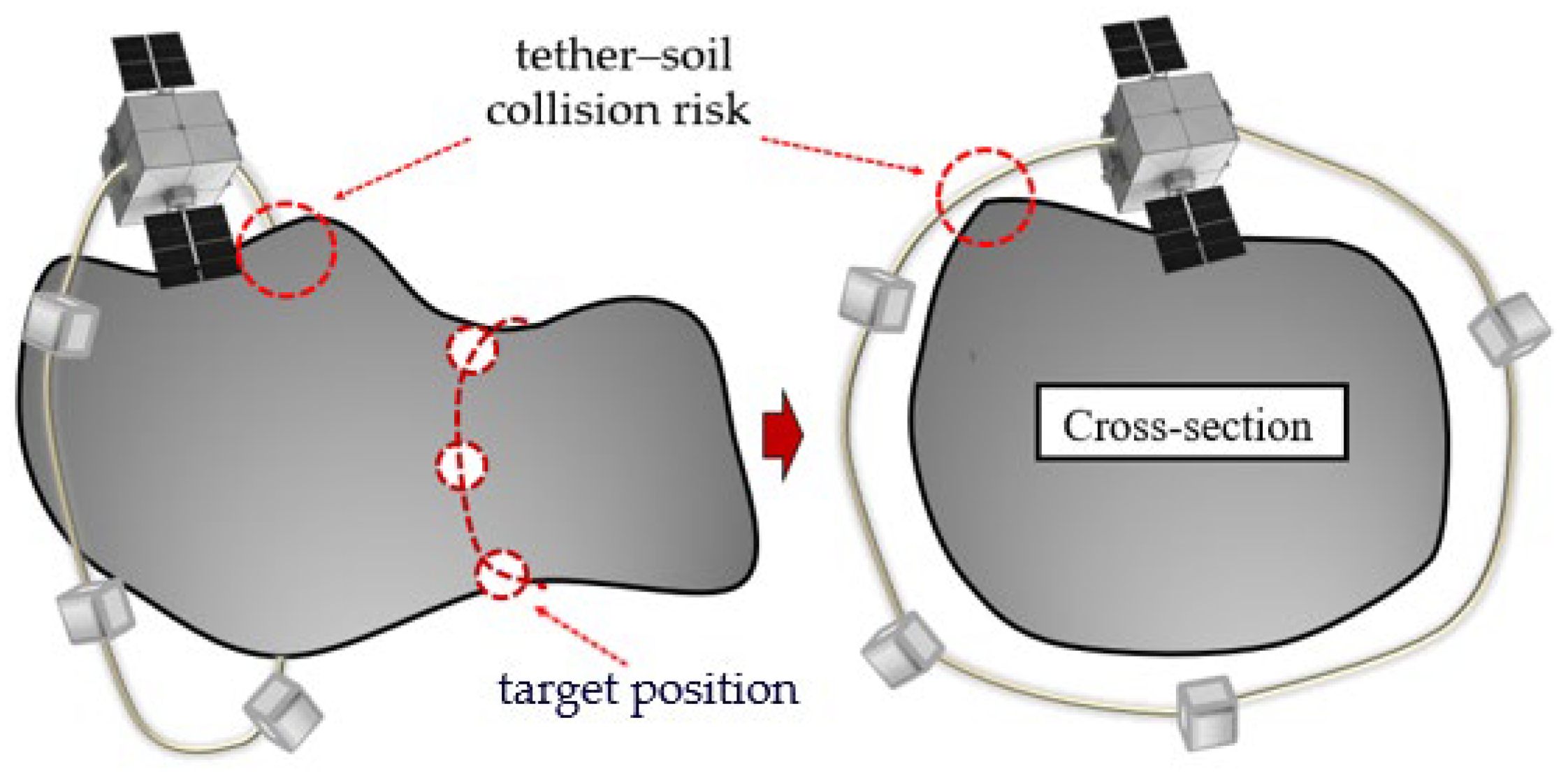
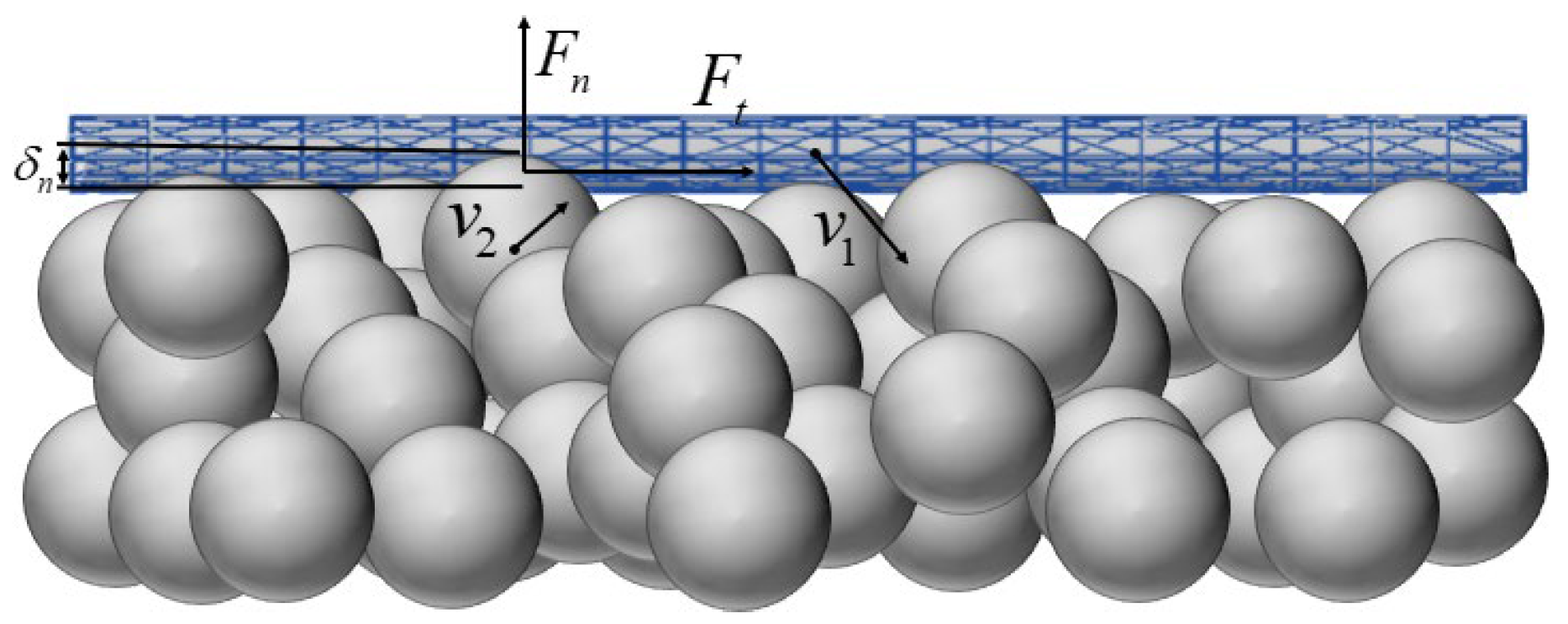
The above research only considers the interaction and reaction between the tether and the spacecraft. In addition to the tension force in the tethers within the system, the external forces considered are limited to gravity, and the influence of the tether–soil interaction on the position of the spacecraft is not considered. However, during the encirclement of small celestial bodies by multi-tethered spacecraft, the tether will collide with the asteroid soil, as shown in
Figure 2. When the tether collides with the asteroid soil, an instantaneous impact force will be generated. This impact force will lead to a sharp increase in the tension of the tether and will also cause the dynamic response of the tether, such as vibration and fluctuation. When the tether collides with the asteroid soil, the impact force generated will be transmitted along the tether to the spacecraft connected to it. This force transmission may have a significant impact on the stability, attitude control, and overall structure of the spacecraft.
When the tether collides with the surface of a celestial body, the interaction generates an instantaneous impact force, leading to a dynamic alteration in the tension distribution within the tether. This energy transfer eventually acts on the connected spacecraft body. The instantaneous impact load will exert additional torque and acceleration on the spacecraft, perturb the original mechanical equilibrium state, and affect the displacement and attitude of the spacecraft. This not only requires the attitude control system to compensate for the attitude deviation in real time but also increases the prediction accuracy requirement of the control algorithm for the dynamic response.
In the field of research on low-velocity impacts on the asteroid soil of small celestial bodies, Reference [
21] studied the Touch-And-Go Sample Acquisition Mechanism (TAGSAM) interaction with Bennu through numerical simulations using two collisional codes, PKDGRAV and GDC-I. Reference [
22] utilized the Discrete Element Method (DEM) to simulate the general effects on the regolith of Phobos, thereby estimating the surface coefficient of restitution. Reference [
23] applied the DEM simulation to test the formation of low-velocity craters (with velocities in the range of 5–50 cm/s) in granular materials under microgravity conditions. These studies have provided valuable insights and laid the groundwork for the establishment of the model in our current paper.
This paper proposes a coupling dynamic model based on a rigid–flexible coupling multi-body dynamics method and discrete element method to study the influence of tether–soil interaction on the trajectory of small celestial body detector. The multi-tethered spacecraft is simplified into a rigid–flexible coupling model of two satellites. The detector adopts a dual quaternion to establish a six-degree-of-freedom rigid body dynamics model. The tether adopts the chain rod model and combines the finite element method to model. The asteroid soil is modeled by the discrete element method. By comparing the displacement results of the detector in the tethered and untethered states, the influence of the tether–soil interaction on the trajectory of the small celestial detector is studied.
3. Numerical Simulation
3.1. Initial Condition
In this paper, the rigid–flexible coupling multi-body dynamics modeling method and the discrete element method are used to establish the spacecraft–tether dynamics model and the asteroid soil dynamics model. The two models are coupled to form the spacecraft–tether system–particle medium collision dynamics model. The displacement results of the detector in two states of tethered and untethered at different collision speeds are compared to explore the influence of the tether–soil interaction on the trajectory of the small celestial body detector.
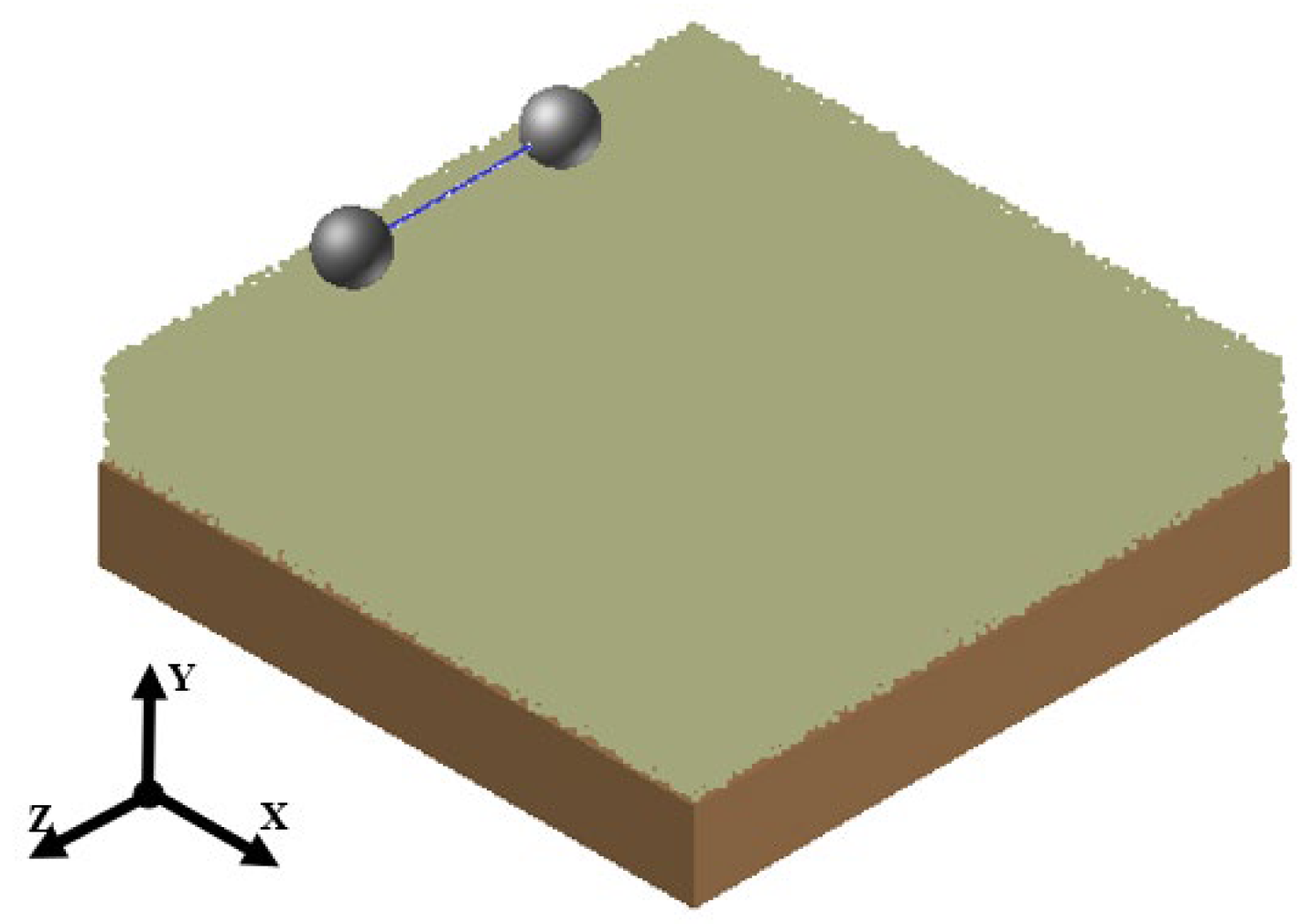
The spacecraft rigid body model, the tether chain rod model, and the small body surface particle discrete element model are combined to form a coupling simulation model. The coordinate axis is defined as
Figure 8, the X direction is the forward direction of the detector, the Y direction is the downward direction of the detector, and the Z direction is the axial direction of the tether. The weak gravitational acceleration of the small body is selected as 0.01 m/s
2, and the direction is the negative direction of the
Y-axis.
The spacecraft is simplified as a homogeneous spherical rigid body, and the specific parameters are as follows. The quality of the spacecraft is 10 kg. In terms of moments of inertia, , , and all have a numerical value of 0.04 kg·m2. Additionally, the radius of the spacecraft is 0.1 m.
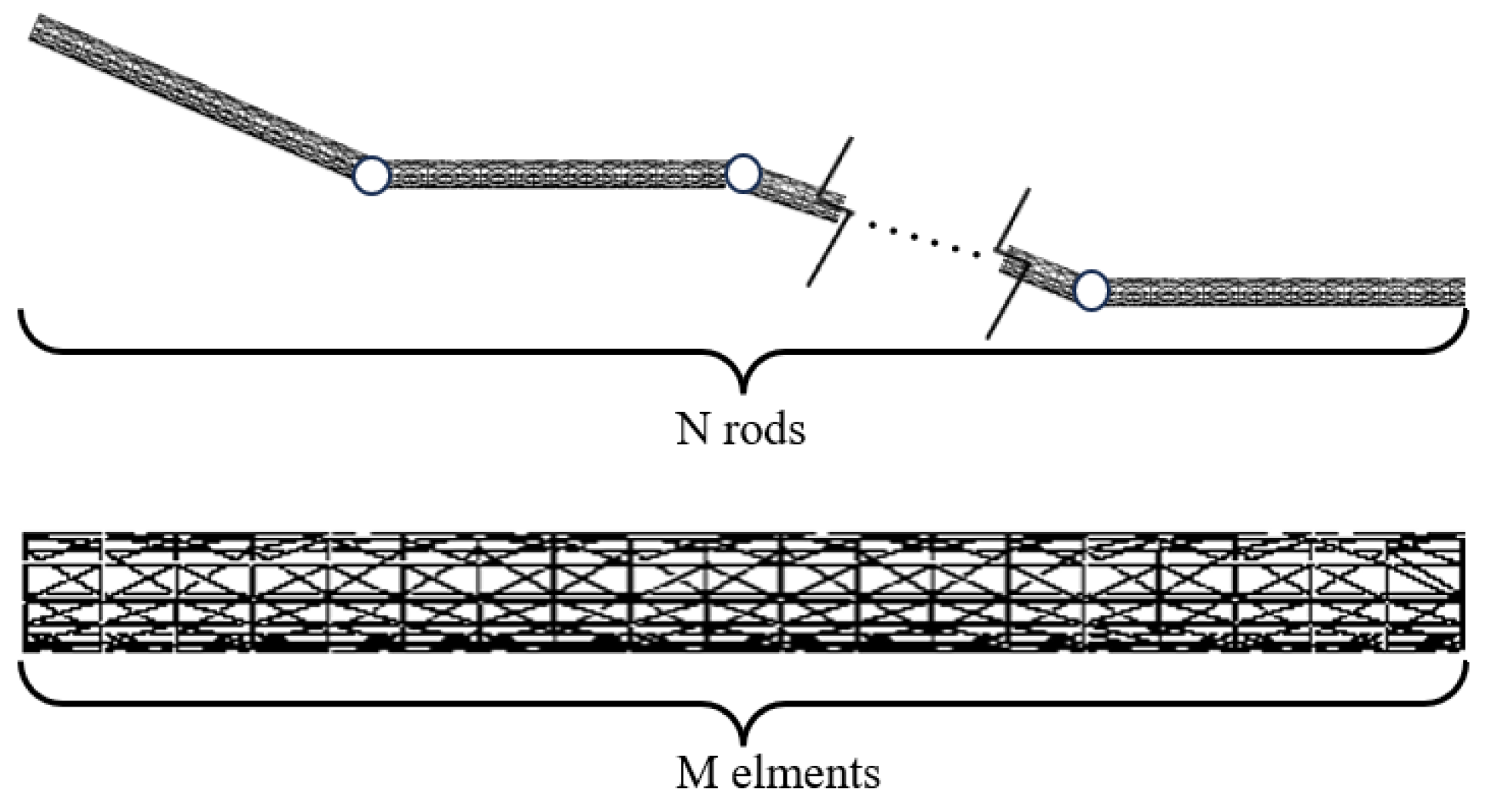
The tether is composed of 10 flexible rods with a length of 50 mm connected by a ball hinge, with a total length of 500 mm. Regarding the material parameters of the tether, the elastic modulus is 200 GPa, the density is 7850 kg/m3, Poisson’s ratio is 0.285, and the damping coefficient is 0.0001.
The gravel layer particles are simplified as spherical particles, and the relevant characteristic parameters [
14] are as follows: the particle diameter is 20 mm, the density of the granular material is 2790 kg/m
3, the particle Poisson ratio is 0.3, the restitution coefficient is 0.8, the rolling friction coefficient is 0.1, and the static friction coefficient is 1.5. In addition, the particle depth is 300 mm, the gravel roughness height is 300 mm, and the gravel groove side length is 2 m.
In terms of contact characteristic parameters, the contact characteristic parameters between particles and the tether (P–T) and between particles and the detector (P–D) are as follows, respectively: the restitution coefficient between the particles and the tether is 0.8, the rolling friction coefficient is 0.25, and the static friction coefficient is 1.2; the restitution coefficient between the particles and the detector is 0.8, the rolling friction coefficient is 0.25, and the static friction coefficient is 1.2.
3.2. Operating Conditions Setting
To comparing the tethered and untethered conditions, this paper sets up three groups of comparative simulations with different speeds based on the above model. There are six operating conditions (OC) under different speeds, including untethered and tethered conditions, as shown in
Table 1.
3.3. Simulation Result
Because there are two operating conditions in each group of comparisons, and there are two detectors in each operating condition, in order to facilitate the comparison, in the result diagram, the untethered system is indicated by the dotted line, the tethered system is indicated by the real line, Detector a is indicated by the symbol ‘’, and Detector b is indicated by the symbol ‘’.
3.3.1. Comparison 1
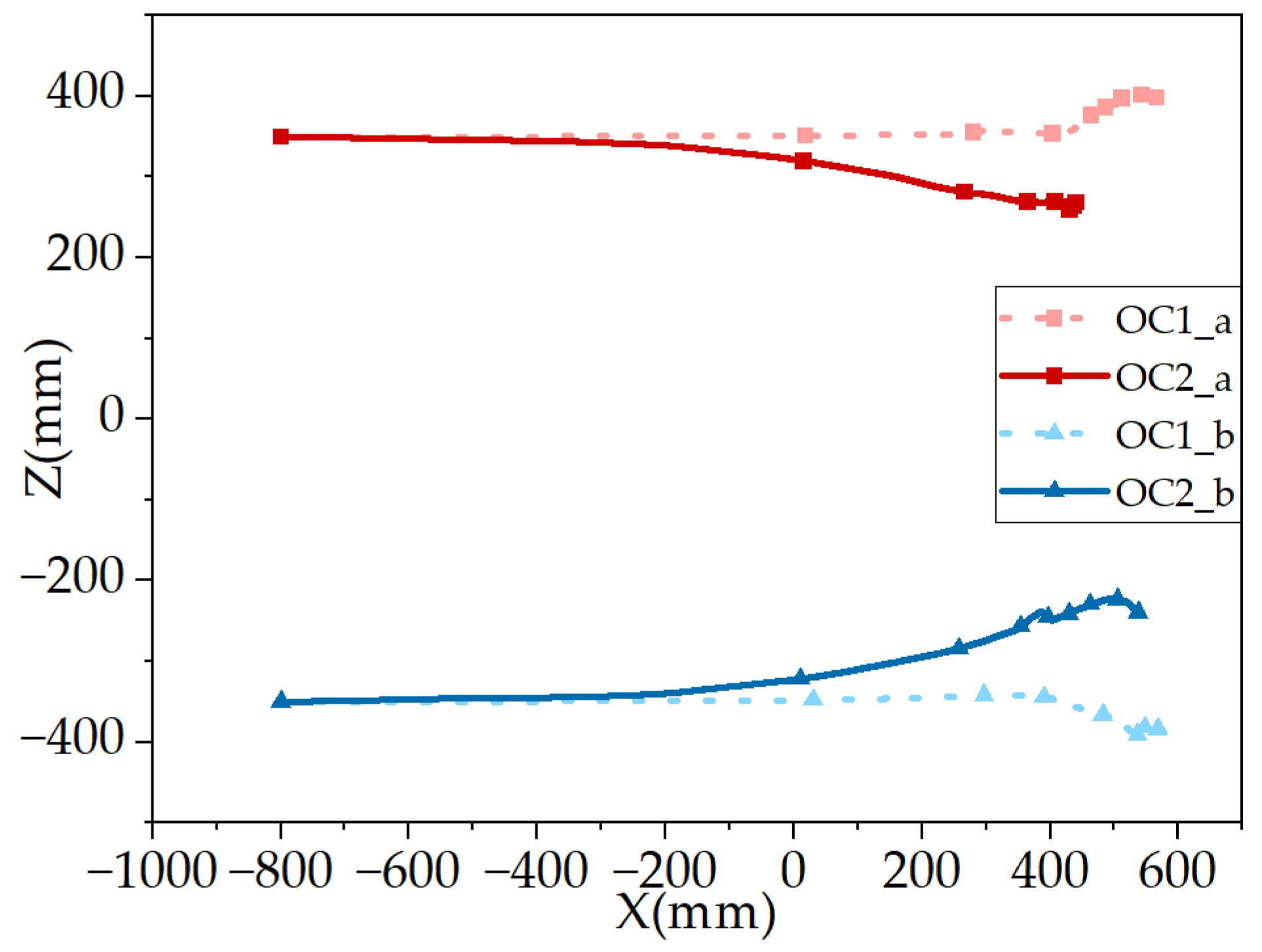
The top view of the detector trajectory in conditions 1 and 2 is shown in
Figure 9, and the time interval between each symbol is 5 s.
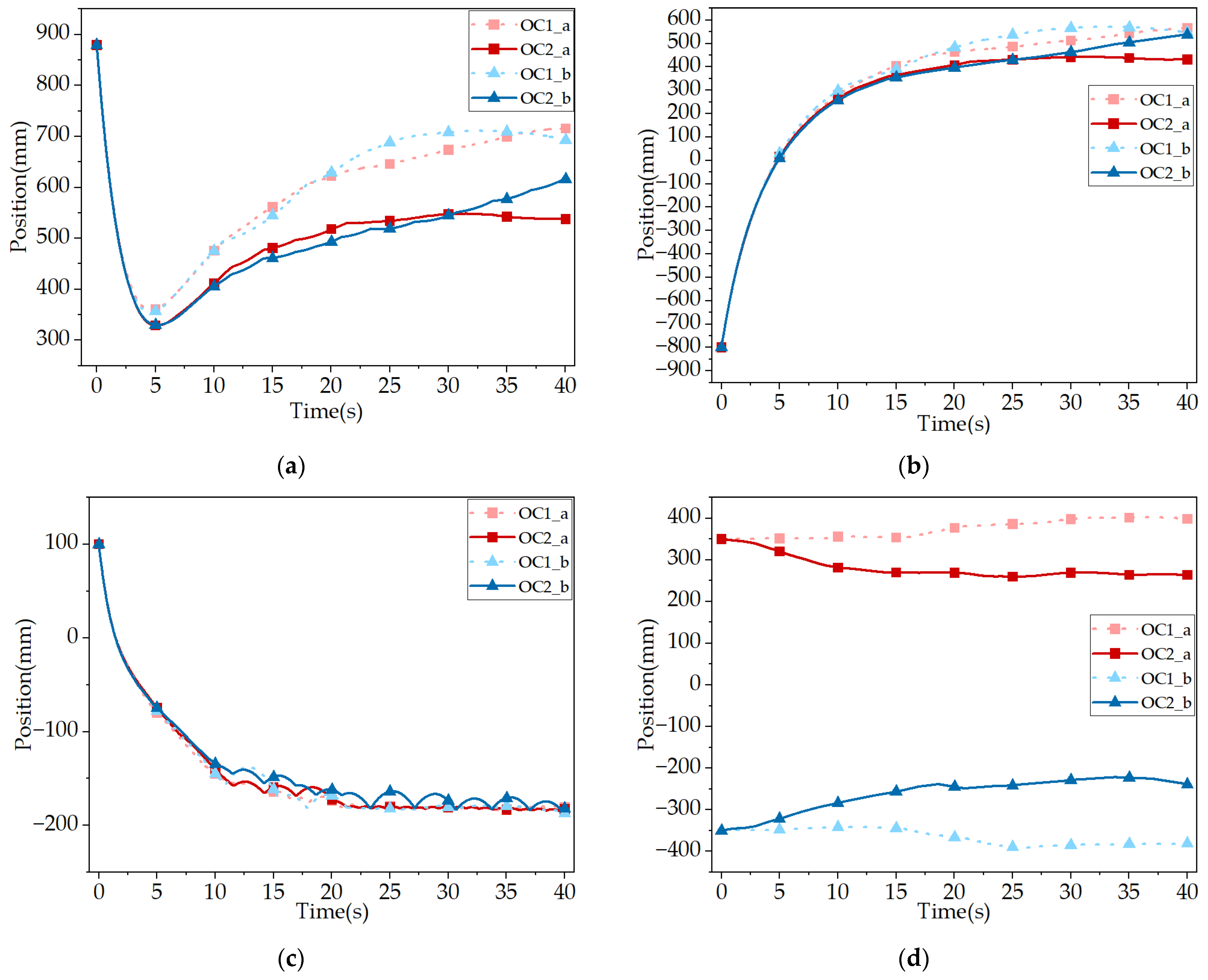
The displacement results of operating conditions 1 and 2 are shown in
Figure 10.
According to
Figure 10, under the condition of an X-direction speed of 300 mm/s and a Y-direction speed of −100 mm/s, the forward displacement of the detector in the tethered system is generally lower than that of the detector in the untethered system. The time required for the detector to drop to the same position in the tethered system is longer than that in the untethered system; compared with the detector in the untethered system, the detector in the tethered system has obvious displacement in the axial direction of the tether, and the detector moves closer to the other detector.
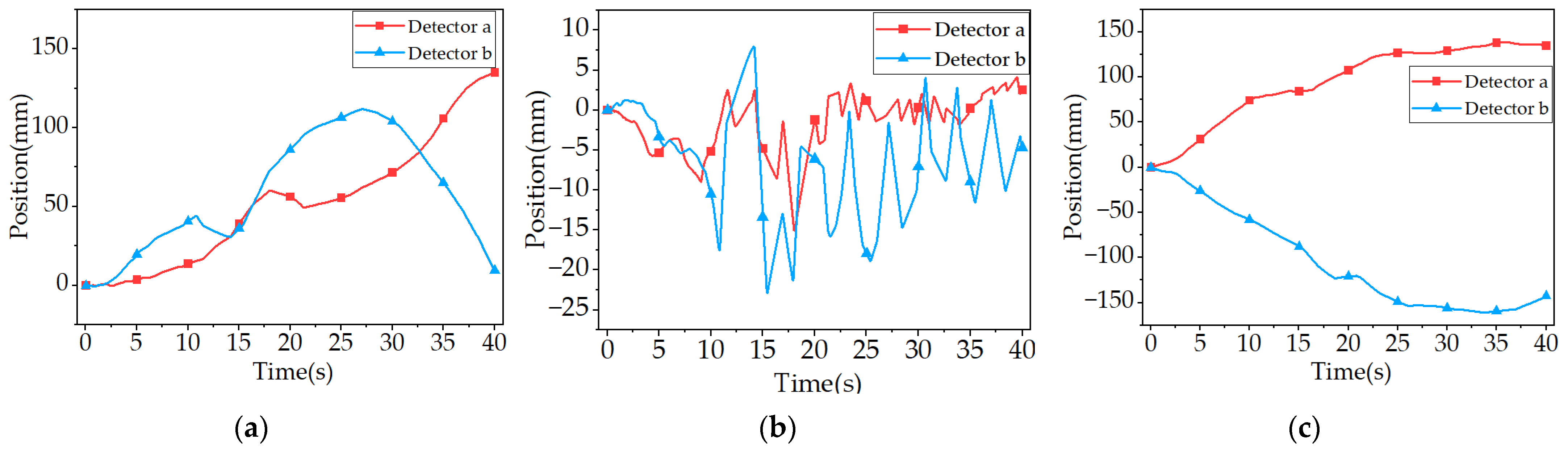
The results of the displacement difference between the detectors corresponding to operating conditions 1 and 2 are shown in
Figure 11.
From the analysis of the above figure, the maximum displacement deviation in the X-direction can reach 135.0 mm, the maximum displacement deviation in the Y-direction can reach 22.9 mm, and the maximum displacement deviation in the Z-direction can reach 161.0 mm.
In the X-direction, the final displacement difference in Detector a in the untethered and tethered states accounts for 9.9% of its total displacement in the untethered state; the final displacement difference in Detector b in the untethered and tethered states accounts for 0.7% of its total displacement in the untethered state. In the Z-direction, the displacement difference between the beginning and end of Detector a in the tethered system is 1.78 times that in the untethered system. The displacement difference between the beginning and end of Detector b in the tethered system is 3.52 times that in the untethered system.
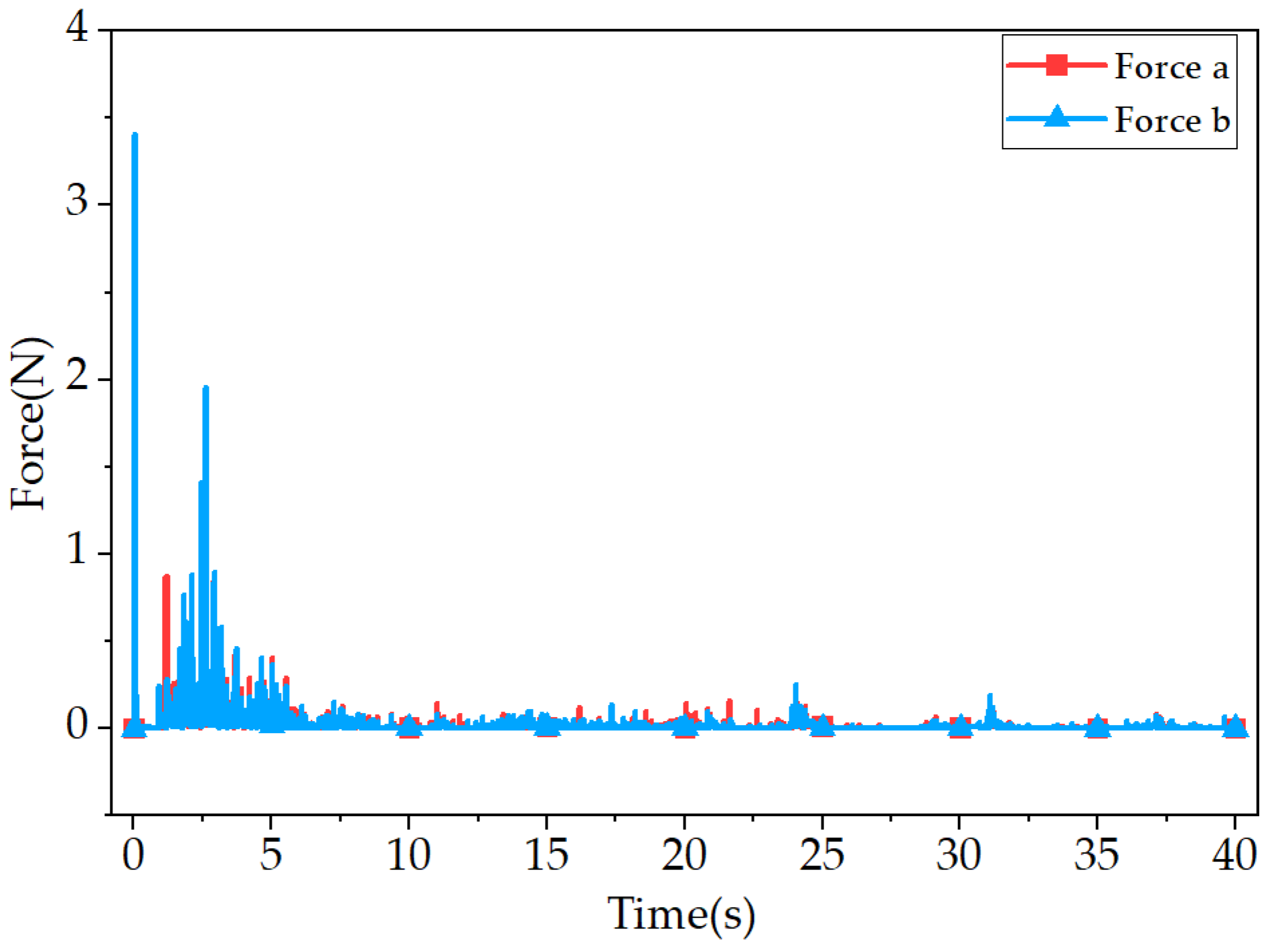
The force at the tether–detector connection in operating condition 2 is shown in
Figure 12. The force transmitted by the tether–soil interaction to the detector can reach a maximum of 3.41 N.
3.3.2. Comparison 2
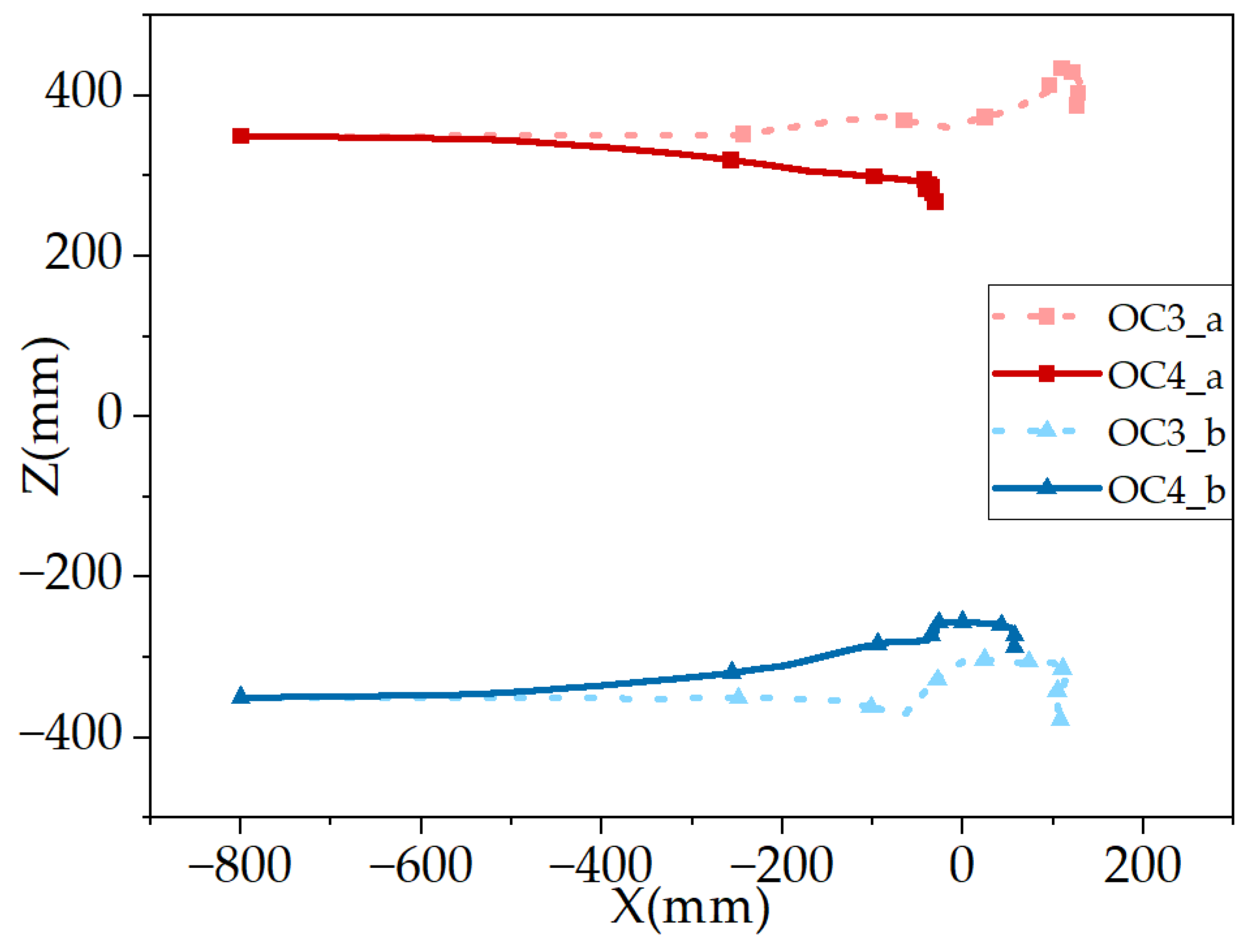
The top view of the detector trajectory in conditions 3 and 4 is shown in
Figure 13, and the time interval between each symbol is 5 s.
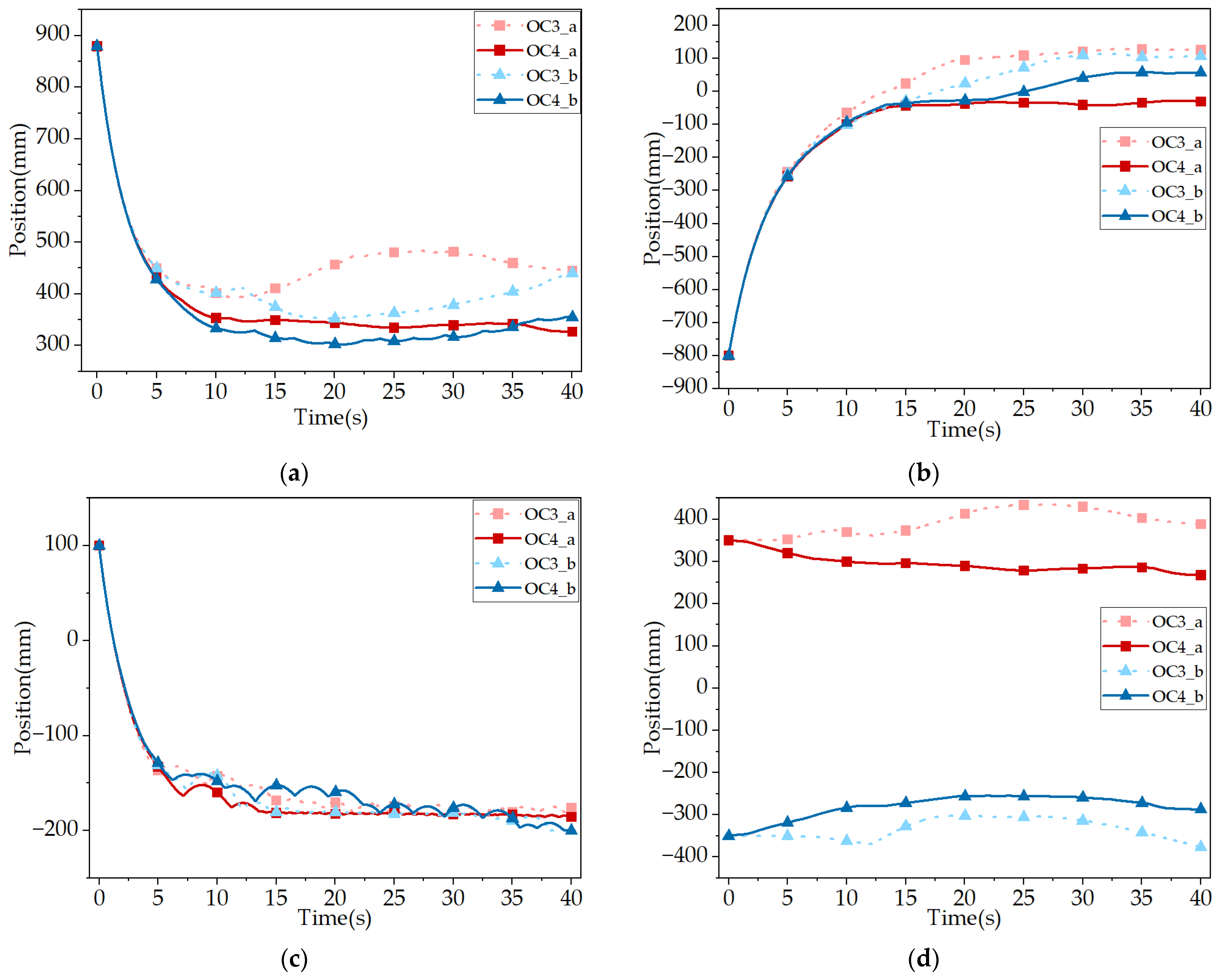
The displacement results of operating conditions 3 and 4 are shown in
Figure 14.
According to the figure, under conditions of an X-direction speed of 200 mm/s and a Y-direction speed of −100 mm/s, the displacement law of the detector is the same as that in Comparison 1, and it will not be described here.
The results of the displacement difference between the detectors corresponding to operating conditions 3 and 4 are shown in
Figure 15.
From the analysis of the above figure, the maximum displacement deviation in the X-direction can reach 170.2 mm, the maximum displacement deviation in the Y-direction can reach 30.1 mm, and the maximum displacement deviation in the Z-direction can reach 156.3 mm.
In the X-direction, the final displacement difference in Detector a in the untethered and tethered states accounts for 16.9% of its total displacement in the untethered state; the final displacement difference in Detector b in the untethered and tethered states accounts for 5.6% of its total displacement in the untethered state. In the Z-direction, the displacement difference between the beginning and end of Detector a in the tethered system is 2.15 times that in the untethered system. The displacement difference between the beginning and end of Detector b in the tethered system is 2.32 times that in the untethered system.
The force at the tether–detector connection in operating condition 4 is shown in
Figure 16. The force transmitted by the tether–soil interaction to the detector can reach a maximum of 2.52 N.
3.3.3. Comparison 3
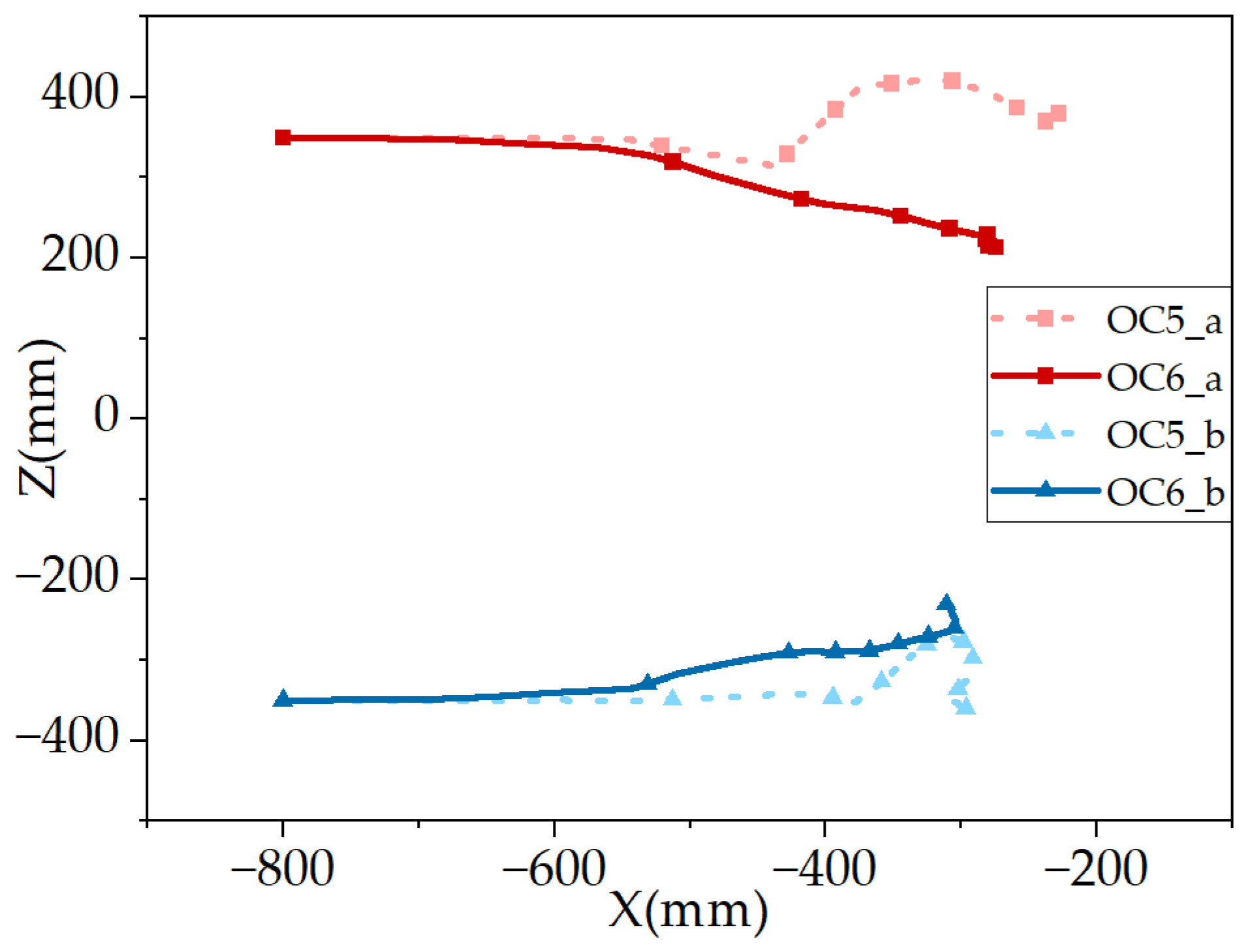
The top view of the detector trajectory in conditions 5 and 6 is shown in
Figure 17, and the time interval between each symbol is 5 s.
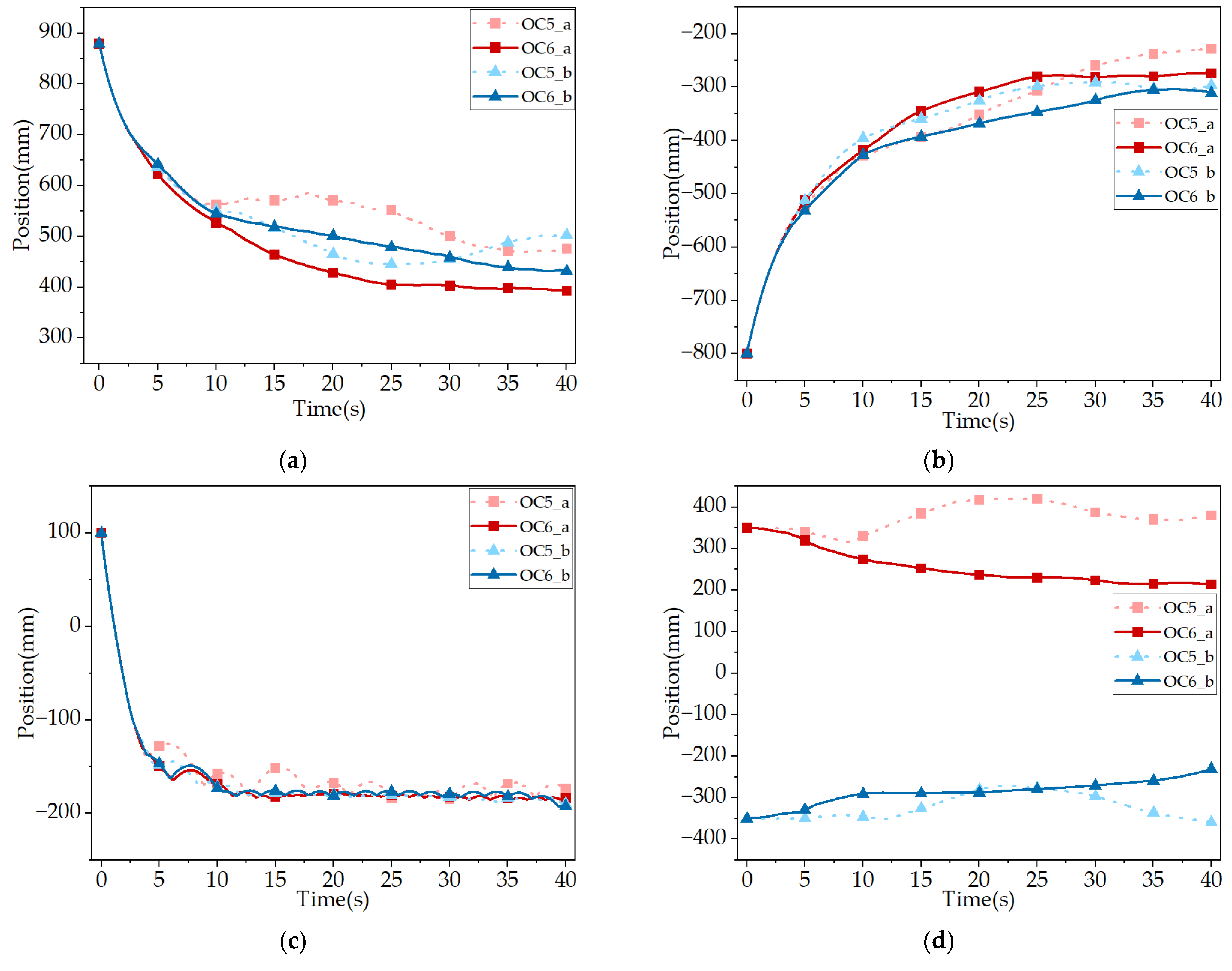
The displacement results of operating conditions 5 and 6 are shown in
Figure 18.
According to the figure, under conditions of an X-direction speed of 100 mm/s and a Y-direction speed of −100 mm/s, the displacement law of the detector is the same as that in Comparison 1, and it will not be described here.
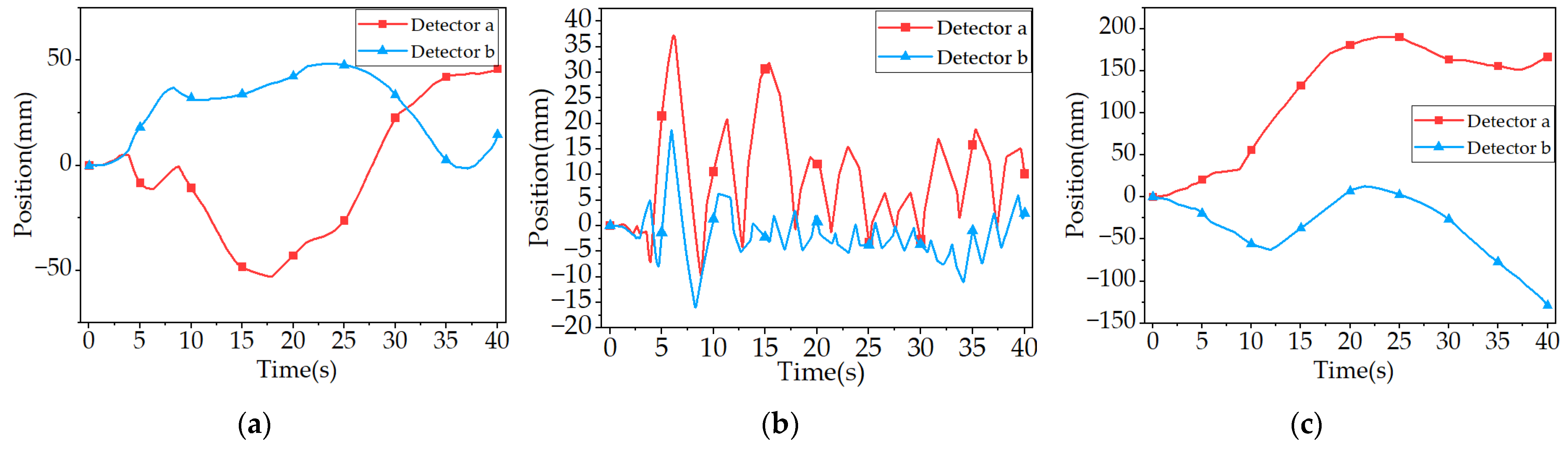
The results of the displacement difference between the detectors corresponding to operating conditions 5 and 6 are shown in
Figure 19.
From the analysis of the above figure, the maximum displacement deviation in the X-direction can reach 53.0 mm, the maximum displacement deviation in the Y-direction can reach 37.3 mm, and the maximum displacement deviation in the Z-direction can reach 190.6 mm.
In the X-direction, the final displacement difference in Detector a in the untethered and tethered states accounts for 8.0% of its total displacement in the untethered state; the final displacement difference in Detector b in the untethered and tethered states accounts for 2.9% of its total displacement in the untethered state. In the Z-direction, the displacement difference between the beginning and end of Detector a in the tethered system is 4.59 times that in the untethered system. The displacement difference between the beginning and end of Detector b in the tethered system is 13.16 times that in the untethered system.
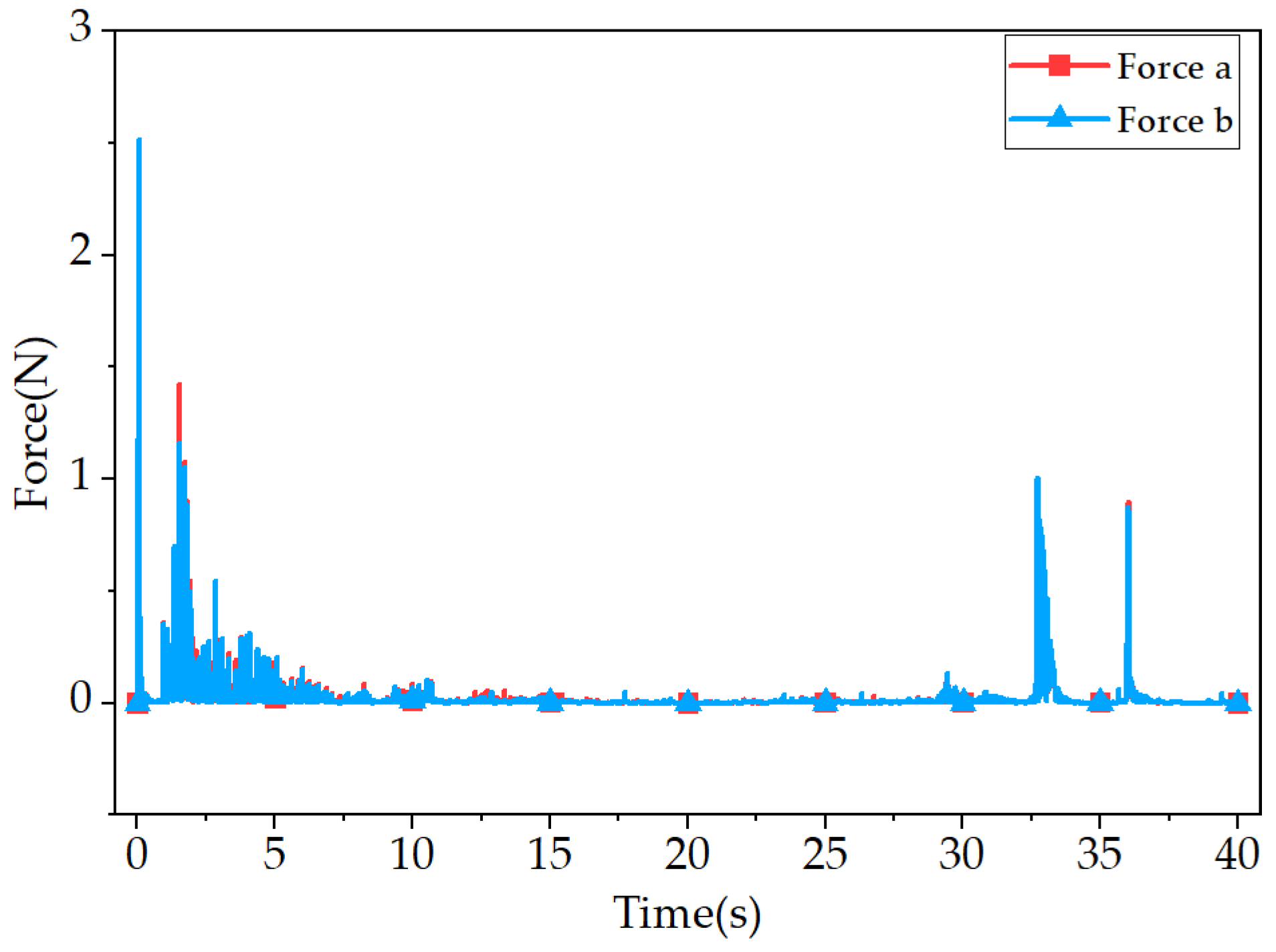
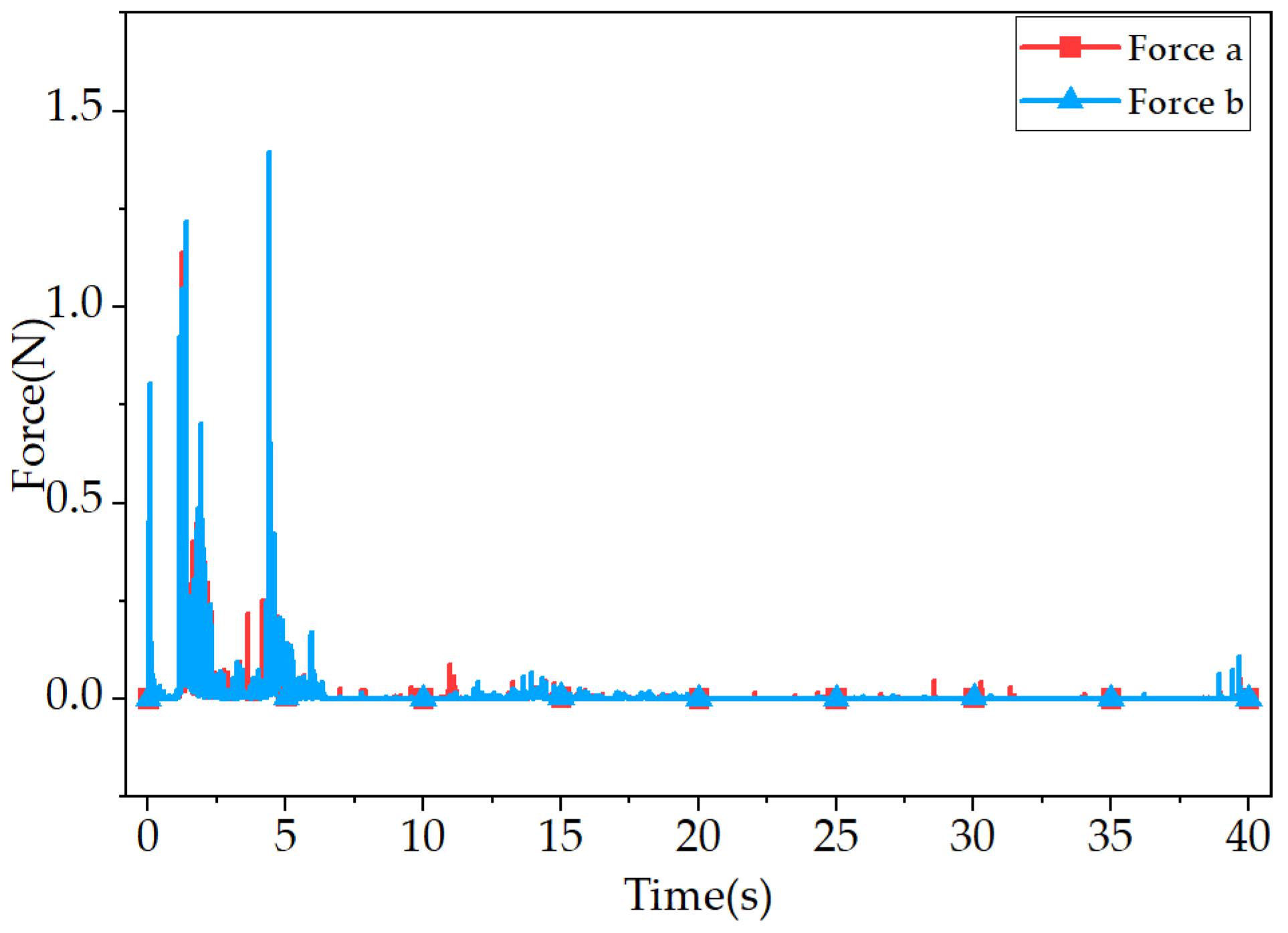
The force at the tether–detector connection in operating condition 6 is shown in
Figure 20. The force transmitted by the tether–soil interaction to the detector can reach a maximum of 1.39 N.
4. Discussion
In this paper, based on the multi-body dynamics method and the discrete element method, the spacecraft–tether–soil coupling dynamics model is established for the risk of tether–soil collision that may exist in the process of multi-tethered spacecraft encircling and capturing small celestial bodies. According to the simulation results, the influence of tether–soil interaction on the trajectory of the detector is analyzed, and the following conclusions are obtained:
The influence of tether–soil interaction on the trajectory of the detector is mainly reflected in the displacement of the detector along the axial direction of the tether. In the forward direction of the detector, the tether–soil interaction reduces the forward displacement of the detector. In the axial direction of the tether, the tether–soil interaction makes the two detectors move closer to each other, and the displacement changes greatly.
In view of the constraints of time and the current authors’ competences, this topic can be further promoted in the following directions in a follow-up study:
Integrating the control system: Spacecraft adaptive control and tether retraction control are integrated into the coupled dynamics model to study the attitude stability, orbit maintenance, and other control problems of the spacecraft in a complex environment, so as to improve the autonomous decision-making and execution ability of the spacecraft. Aiming at the dynamic characteristics of the tether during the retraction process, key technologies, such as tension control and speed adjustment of the tether, are studied to ensure the stability and safety of the tether during the retraction process.
The relationship between tether dynamics and displacement differences in granular material deserves further attention. A comprehensive analysis of tether–particle interactions could significantly enhance our understanding of the physical processes at play. Thus, we propose this as a critical future research direction, with the potential to unlock new insights into the behavior of systems involving granular materials and tether-like structures.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}