1. Introduction
In recent years, interest in lunar exploration has surged, as NASA’s Artemis program [
1] demonstrates, with the declared goal to return humans to the Moon.
To facilitate upcoming lunar operations, space agencies worldwide, in partnership with the private sector, are developing a dedicated communication and navigation network in lunar orbit. The European Space Agency (ESA) is advancing this effort through its Moonlight initiative [
2], which aims to establish Lunar Communication and Navigation Services (LCNSs). By collaborating with commercial providers, the ESA seeks to enhance the capabilities available for both institutional and private lunar ventures.
The LCNS navigation framework draws inspiration from terrestrial GNSS, incorporating similar methodologies and technologies. It is based on the transmission of broadcast signals from LCNS satellites to predefined regions. These satellites will emit one-way signals while maintaining synchronization with each other and a common reference time scale. By processing the time of arrival and frequency of received CDMA (Code-Division Multiple-Access) signals, users can extract key navigation parameters—including pseudo-range, Doppler shift, and carrier phase—using broadcast navigation messages containing essential data such as ephemerides and clock corrections. With information from multiple LCNS satellites, users can independently compute their position, velocity, and the offset between their local receiver clock and the LCNS system reference time.
In this context, the one-way broadcast signal is also referred to as the Augmented Forward Signal (AFS), as defined in the Lunanet interoperability framework [
3]. To maximize performance, LCNS is designed to be interoperable with Lunanet, allowing users to leverage multiple compatible navigation services, much like the multi-constellation approach used in terrestrial GNSS.
For effective navigation, users will need receivers capable of acquiring and tracking one-way signals from multiple LCNS satellites. However, given the technical constraints involved in deploying a full lunar navigation and communication constellation, the initial operational phase will likely include a limited number of satellites. As a result, standalone LCNS-based Position, Velocity, and Time (PVT) solutions may not always be sufficient to meet user requirements. To address this, PVT performance must be evaluated in conjunction with additional sensor integrations.
While previous works have focused on the case of a user orbiting the Moon [
4], this paper presents an analysis of navigation performance for a mobile surface user, such as a lunar rover. Lunar rover navigation has been subject to many studies, focusing on different navigation techniques. Inertial navigation is for example considered in [
5]. In ref. [
6], the authors have developed crater-based localization to enable lunar rovers to estimate their global position and heading on the Moon with a goal performance of position error less than 5 m (m) and heading error less than 3 degree, 3σ, in sunlit areas. Visual odometry navigation is considered in [
7], while position of a rover on surface of the Moon is suggested in [
8] by using a group of self-calibrating rovers, which serves as mobile reference points. The present paper is specifically focused on the analysis of the performance that can be achieved using LCNS, examining the benefits of integrating complementary sensors, including an Inertial Measurement Unit (IMU) and a Digital Elevation Model (DEM), to enhance positioning accuracy and reliability. This study is currently under investigation by space agencies and research centers, as the works [
9,
10] show. In this research line, in [
11] the use of an IMU is disregarded, while it is present in [
10]. In this sense, the present work does not present novel or groundbreaking navigation algorithms, but it is aimed at serving as a benchmark for assessing the performance that can be expected for lunar rover navigation; specifically, this paper analyzes the relative importance of the different sensors, suggesting the best solution and a sub-optimal yet cost-effective solution. The convergence analysis is included to consolidate the performance assessment; finally, a Monte Carlo approach is implemented in order to have a reasonable estimate of the best accuracy that can be achieved by implementing the complete sensor suite. At the scope, a high-fidelity simulator of the available measurements (pseudorange, accelerations and local altitude information) is developed, as they serve as input for a loosely coupled Kalman Filter.
The paper is organized as follows: in
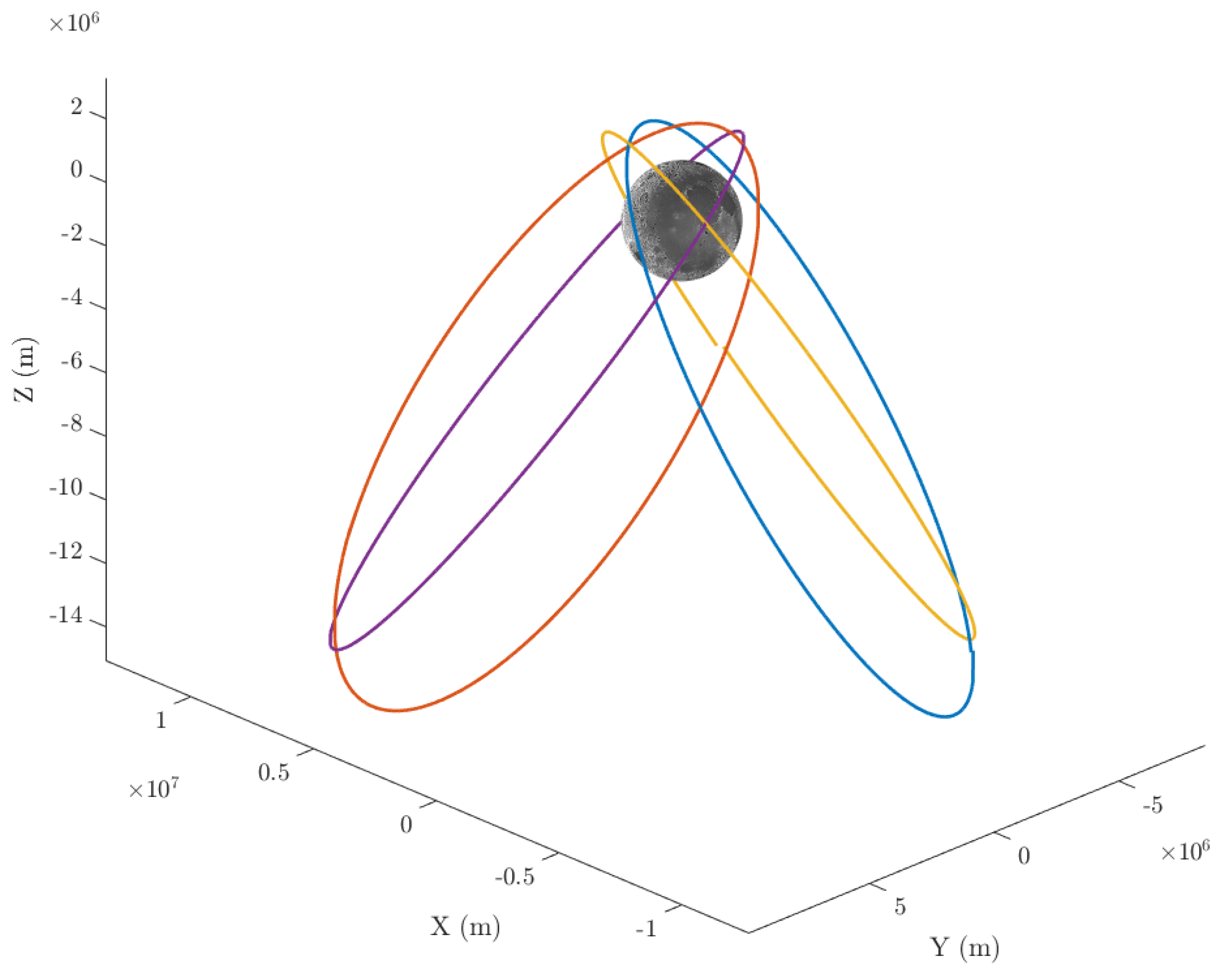
Section 2, the scenario in terms of LCNS constellation and rover trajectory is described; the models of the sensors’ measurements are described in
Section 3. The filter implementation, with all the modifications needed to include the different sensors, are described in
Section 4 and
Section 5. In
Section 6 the impact of the inclusion of additional sensors is analyzed and discussed; in
Section 7 a Monte Carlo approach has been implemented to statistically characterize the results, and in
Section 8 the convergence time is studied. Final remarks are reported in
Section 9.
6. Simulation Results: Analysis of Sensors Contribution
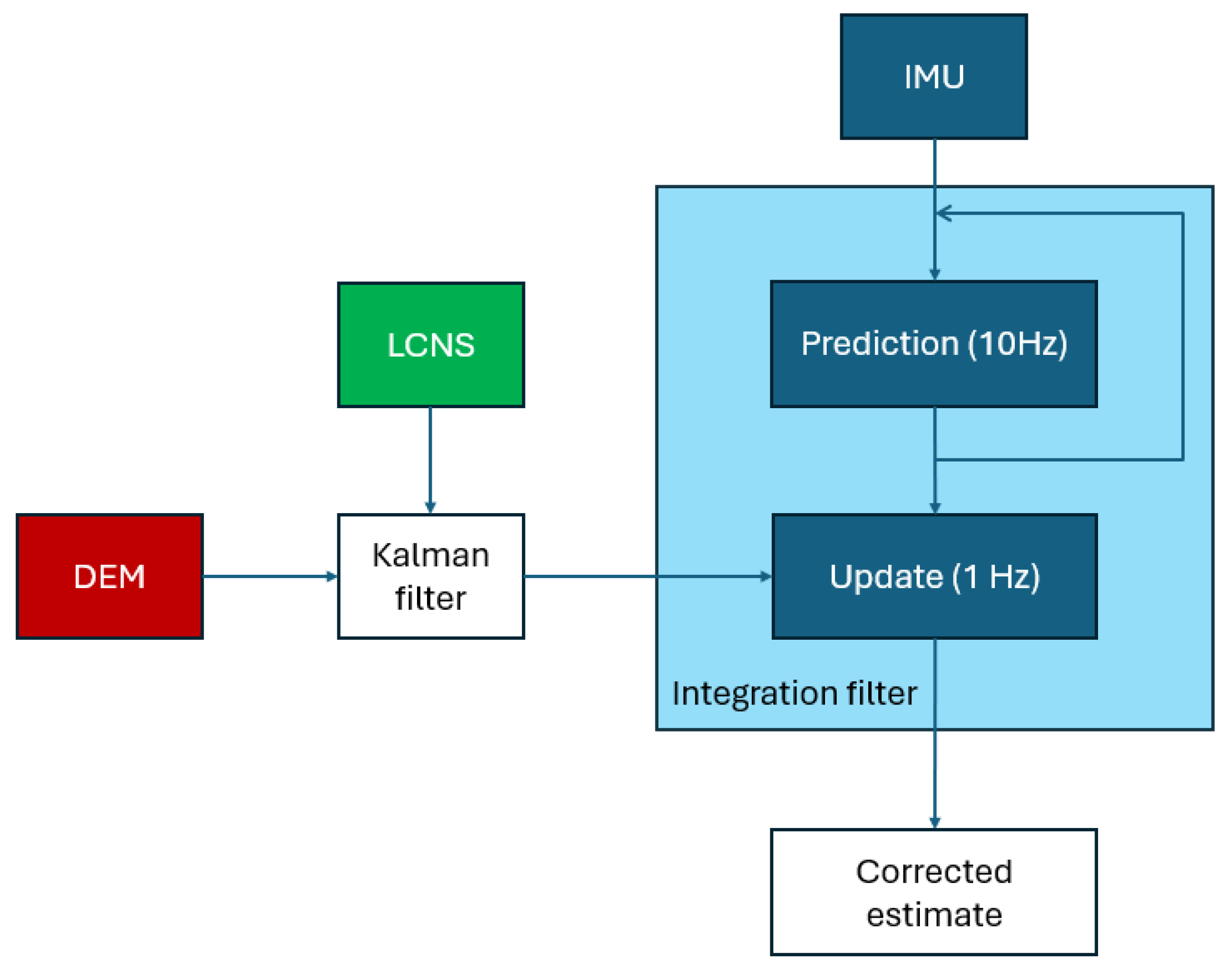
In order to run the simulations, the architecture reported in
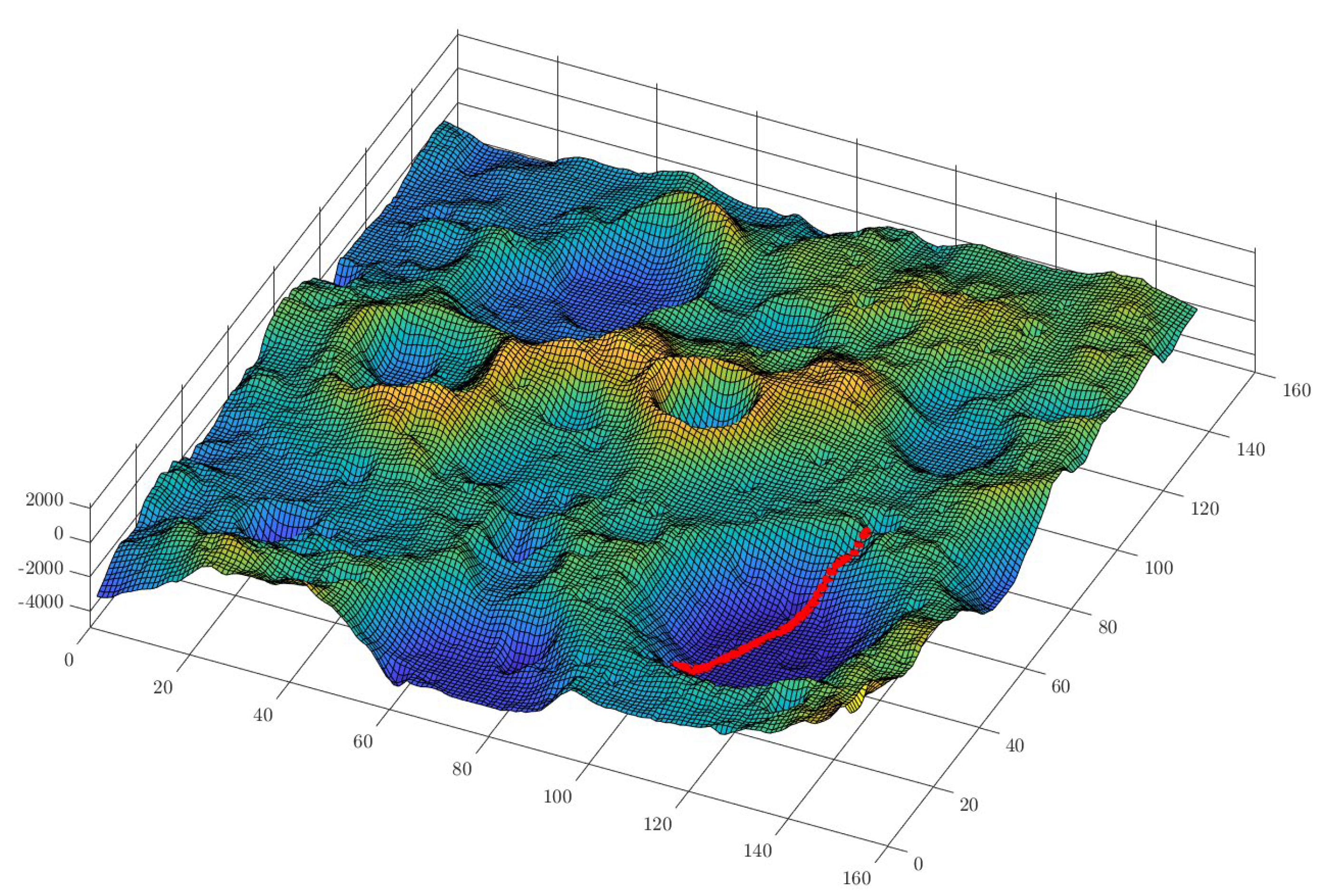
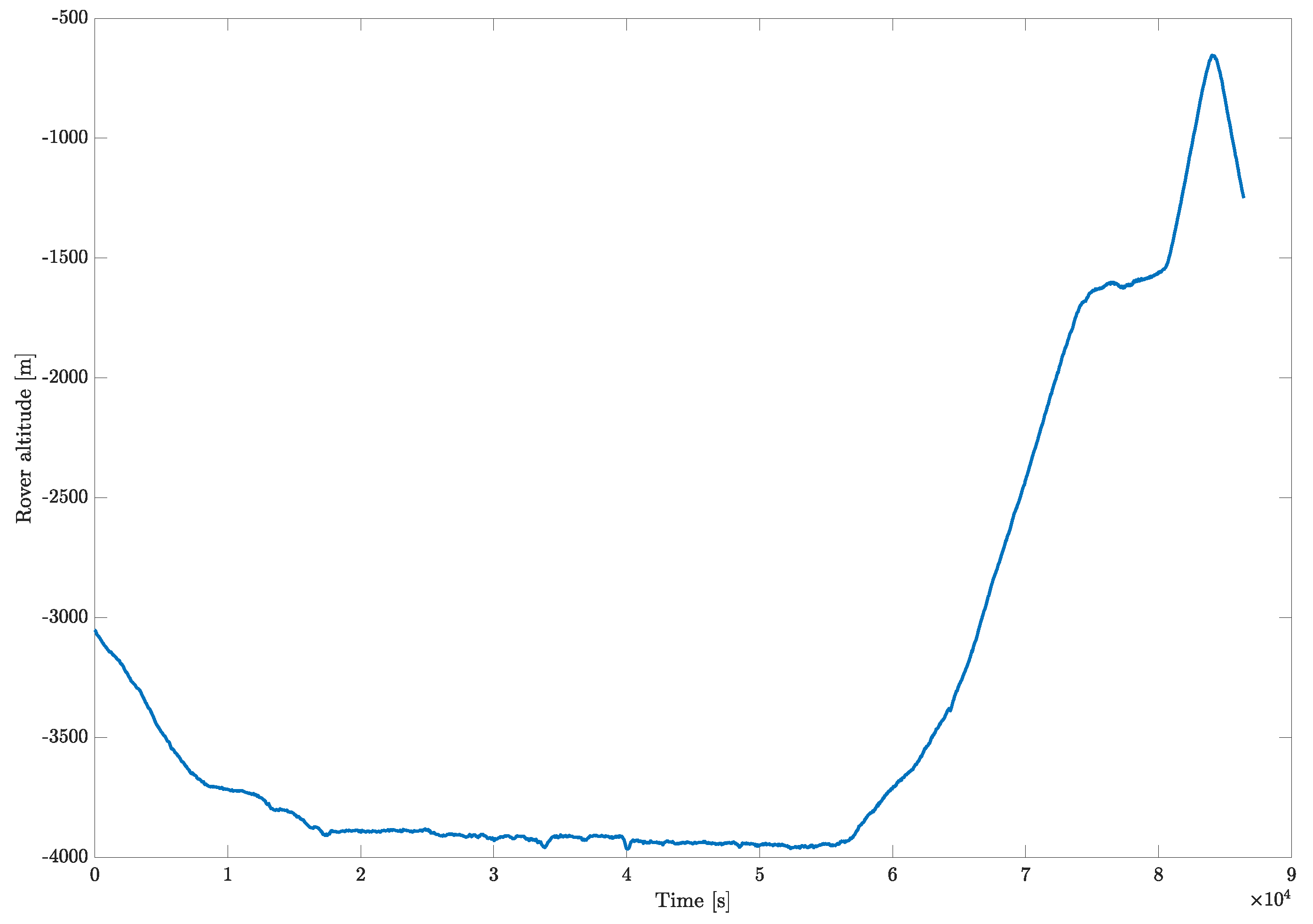
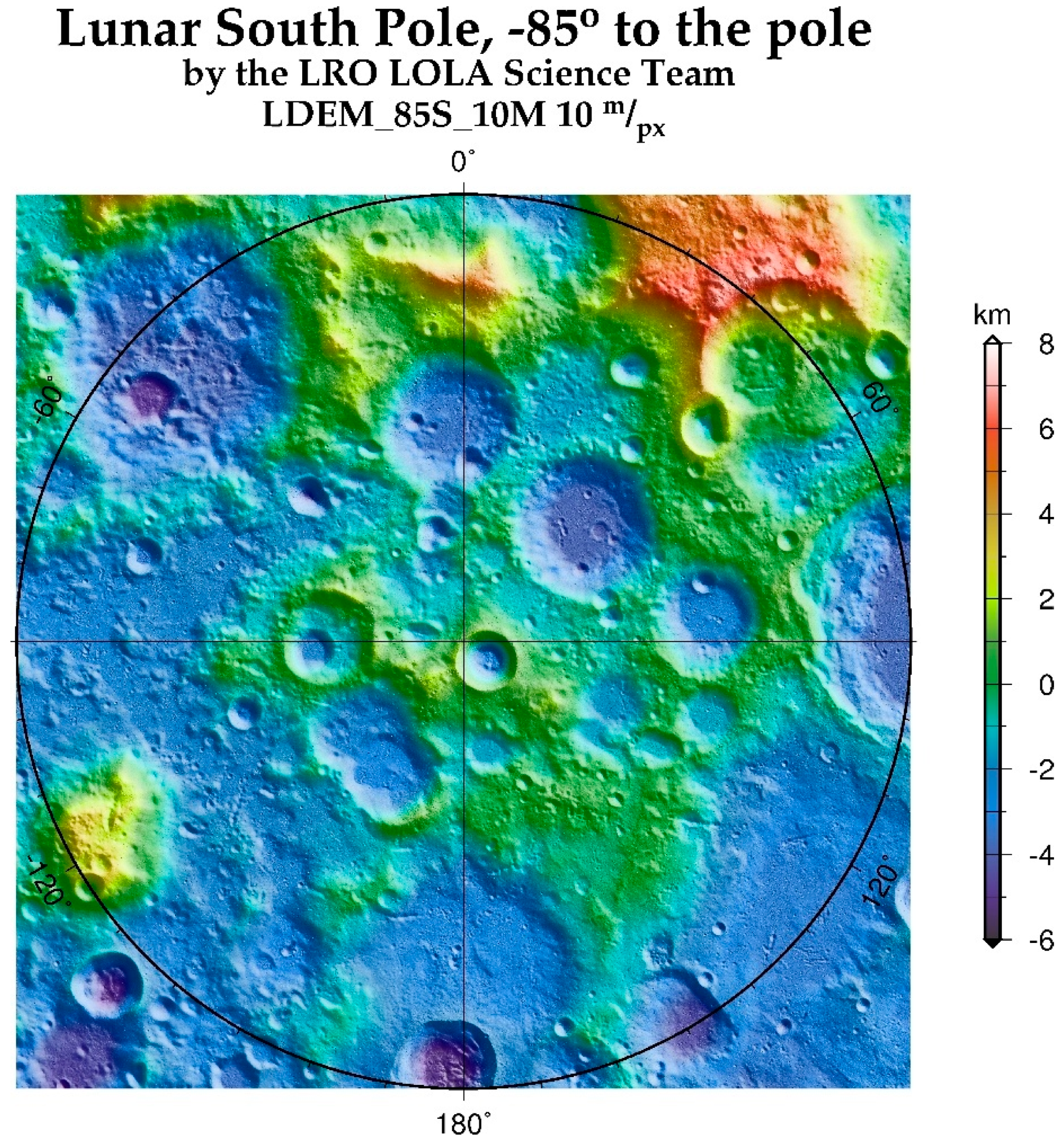
Figure 7 is implemented. The ground truth is realized by taking into account a high-precision propagation of the satellite state (using System Tool Kit 12 software) and the realization of the DEM (derived—but not coincident—with the data in [
23]); the sensors models provides the noisy measurements from LCNS satellites, DEM, and IMU, which can be used (or not, according to the cases) as input to the navigation filter.
In this first analysis, the focus is on the performance of PVT algorithm when stationary. Therefore, the initial conditions are considered perfectly known. The convergence time will be analyzed in a separate case study (
Section 8).
For this scenario, the percentage of time in which a number
j satellites are in view is reported in
Table 7.
The simulation time span is one day (86,400 s), with the initial date fixed at 1 January 2027. The time step is 1 s for LCNS and DEM information, while it is 0.1 s for the IMU.
The estimated state, in terms of position, velocity, and time, is compared with the true state for four different sensor suites, combining the availability of the satellite navigation (as a baseline), the DEM, the IMU, and all three information sources.
6.1. LCNS—Standalone
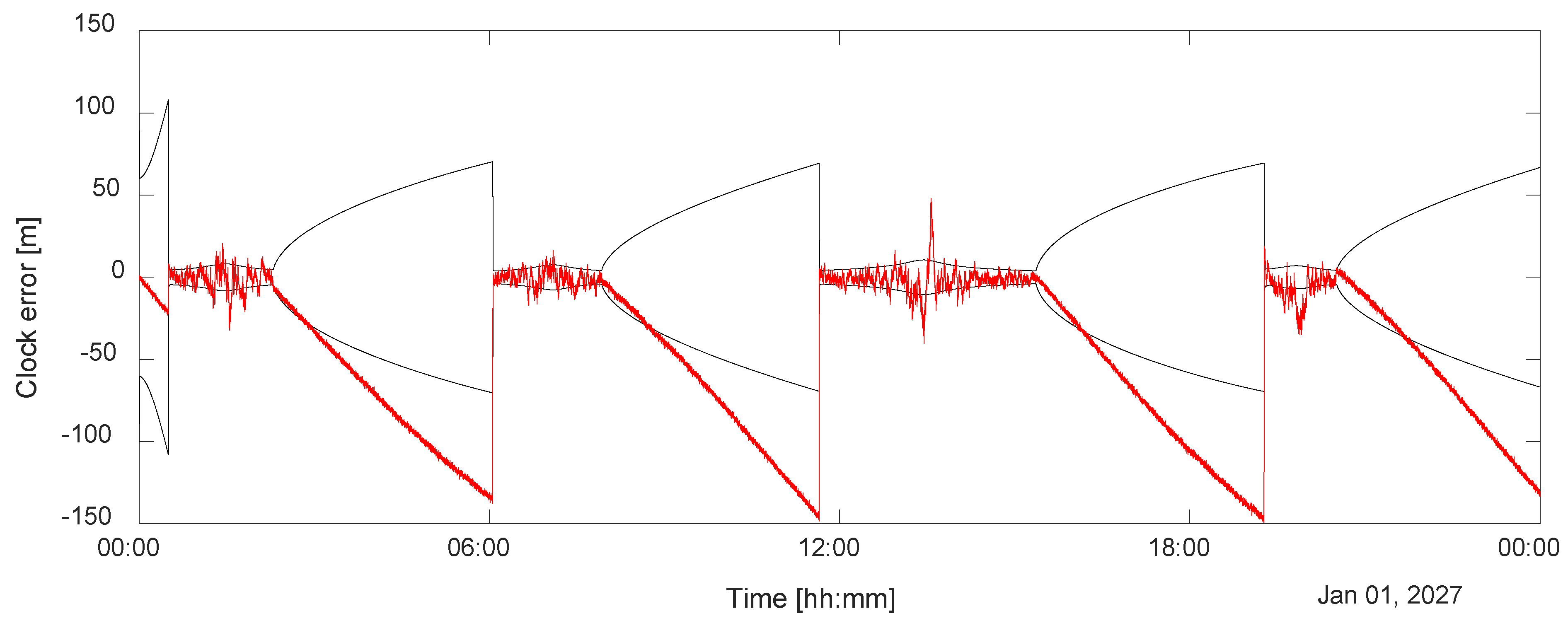
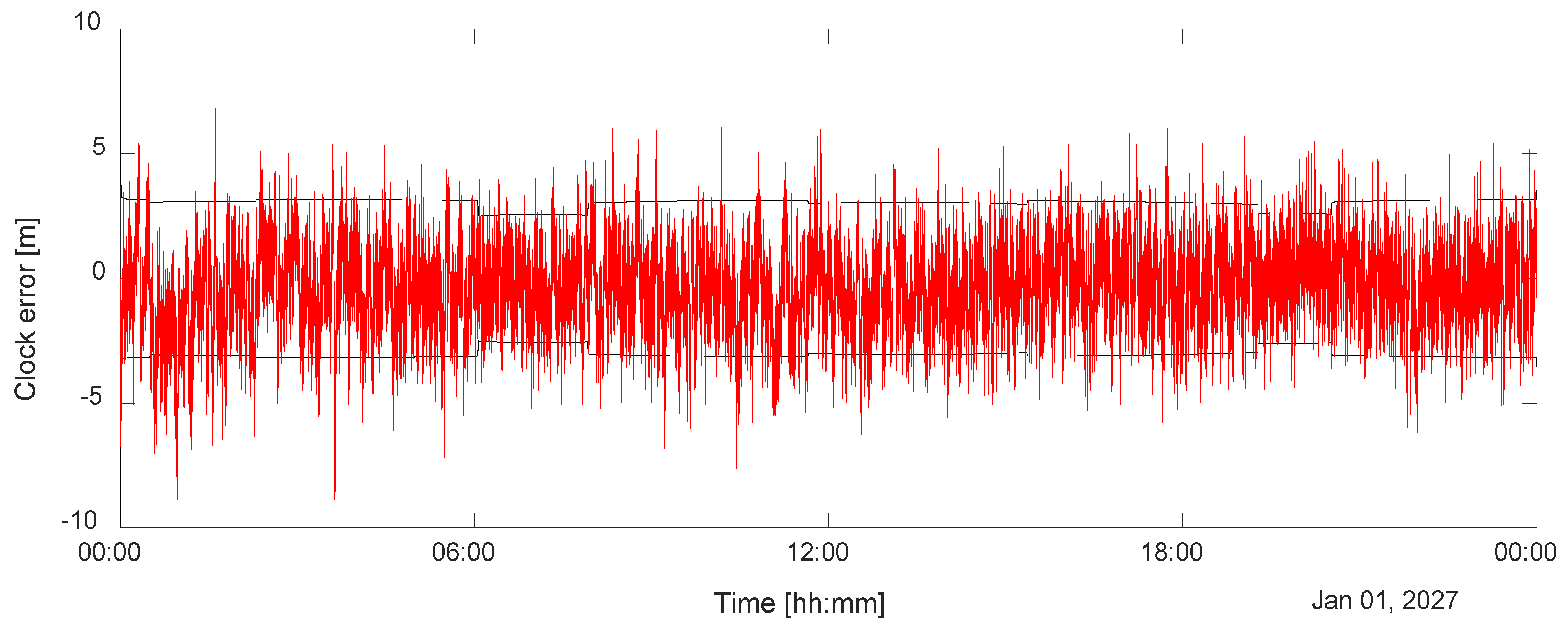
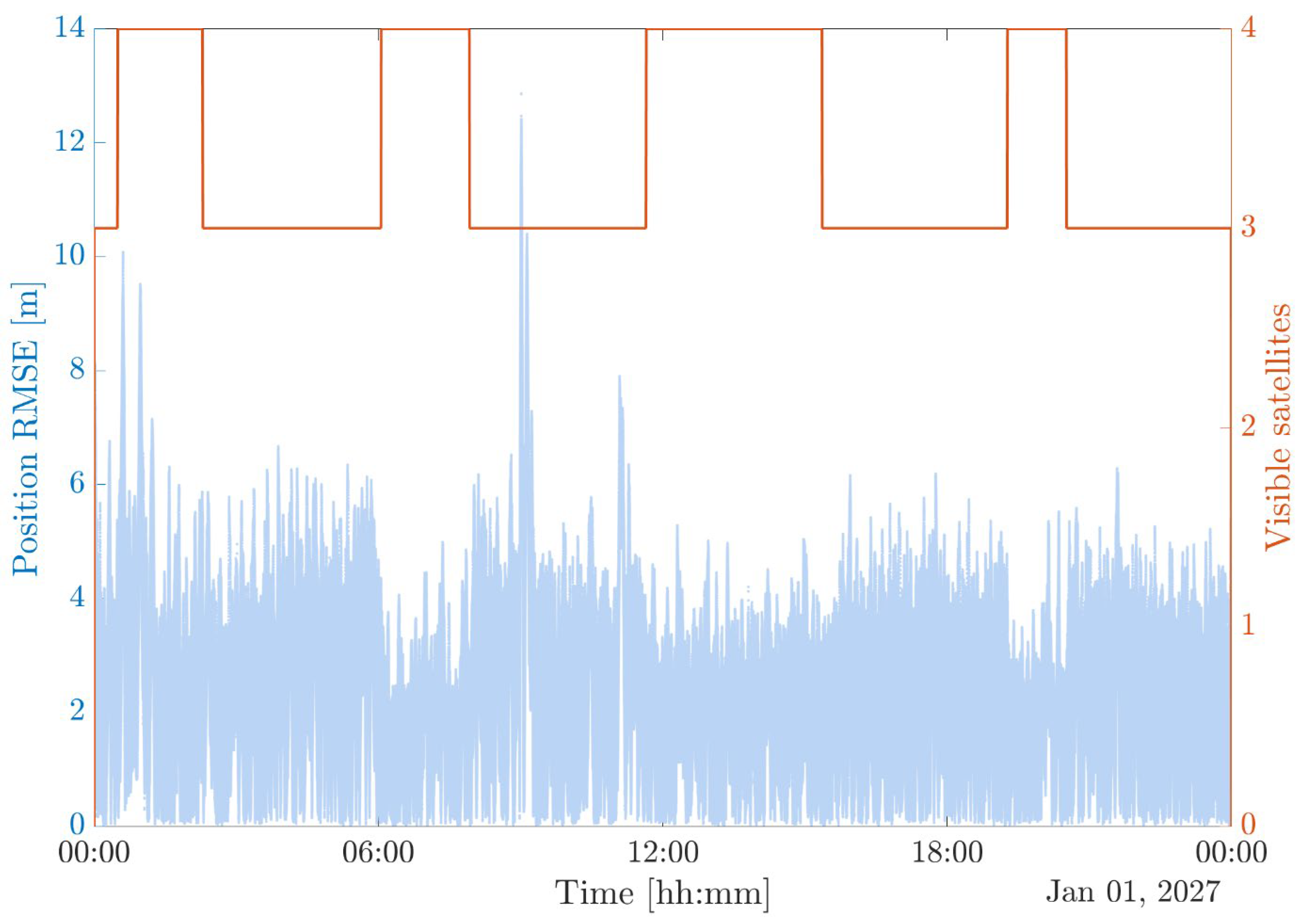
In this first scenario, the rover can only rely on satellite navigation. Unfortunately, the recurrent periods of poor visibility (i.e., only three satellites available) do not allow for accurate navigation. As it is possible to see from
Figure 8, the unknown trajectory of the rover does not permit an accurate prediction in the time in which three satellites are visible, and the error periodically diverges. Similar behavior, as expected, can be detected in the clock error (
Figure 9).
6.2. LCNS + IMU
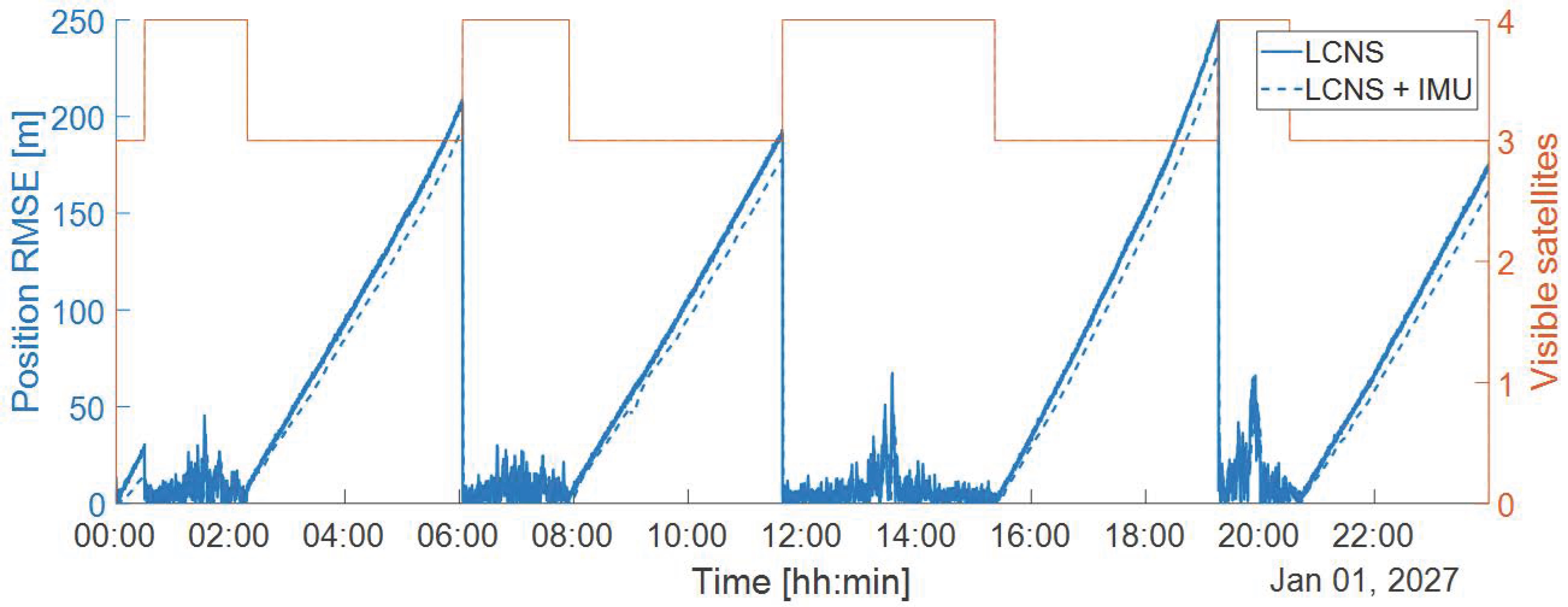
In this second simulation, the IMU is used together with satellite navigation. The position root mean square error, plotted in
Figure 10, shows limited improvements. In fact, the IMU contribution is strongly dependent on the last estimated position and velocity, which is, however, poorly accurate due to the limited visibility of the ELFO satellites.
In this condition, the statistical analysis of the error, reported in
Table 8, suggests that accurate navigation of the rover is not possible. Here and in the following, the 95th percentile, i.e., the value below which 95% of the data points falls, is used as a metric for the analysis of navigation performance.
6.3. LCNS + DEM
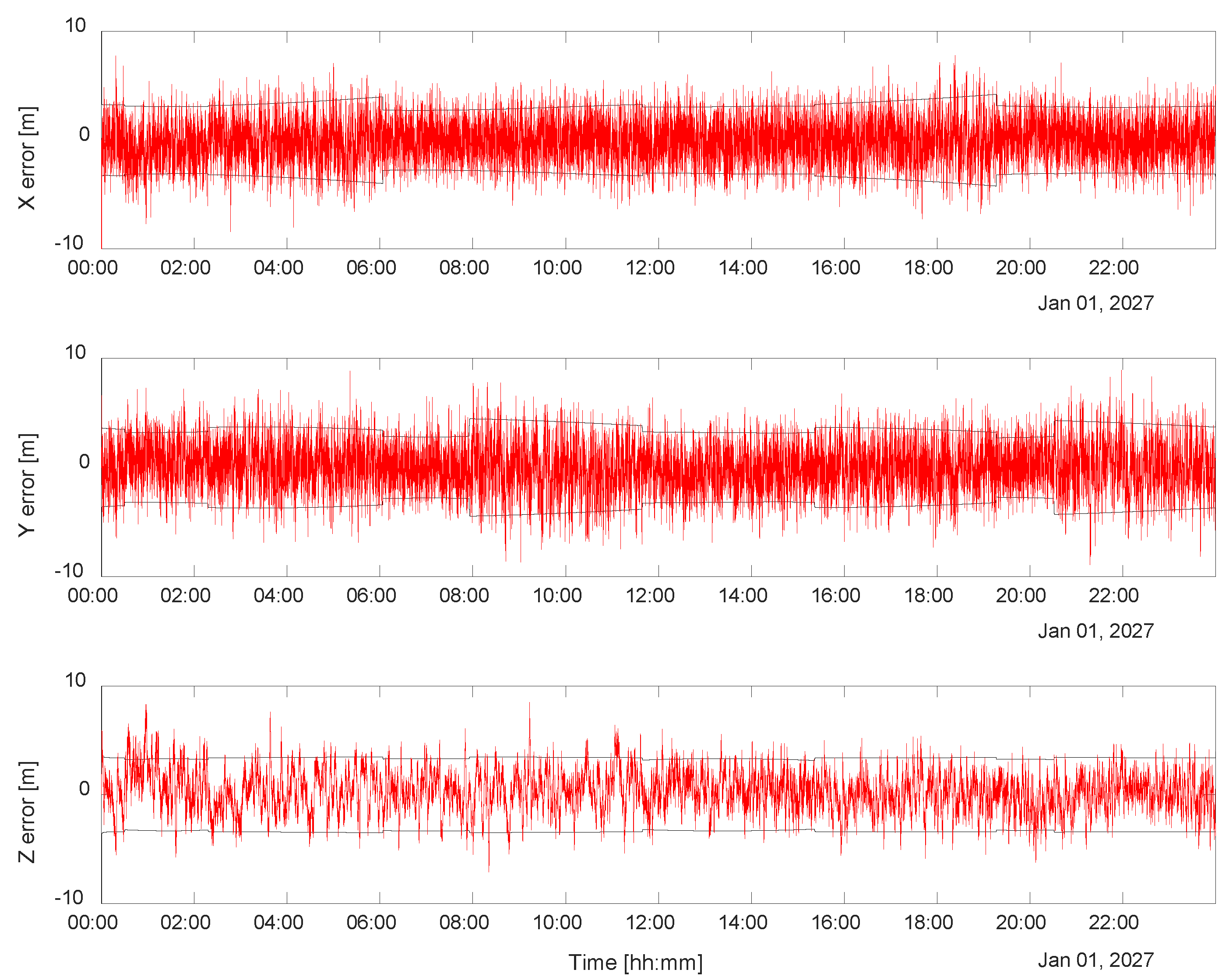
A remarkable improvement can be achieved if a DEM is available. This additional source of information is comparable (in terms of effects on the estimation accuracy) with a virtual fifth ELFO satellite. In fact, observing
Figure 11 and
Figure 12 for the error on the coordinates and the time, respectively, the performance in this case is far less affected by the times in which only three satellites are visible. The statistics summary in
Table 9 shows that in this case, a navigation with meter-level accuracy is possible, with nearly two orders of magnitude improvement on the position with respect to the case in which the DEM is not used. Quite interestingly, the lack of an IMU produces a worsening of the velocity estimates.
6.4. LCNS + DEM + IMU
As easily predictable, the best performance can be achieved when implementing a navigation filter that uses information from LCNS, DEM, and IMU (see
Figure 13). In particular, the horizontal position error decreases by about 40%, while the horizontal velocity drops by a remarkable 78% (see the statistics in
Table 10 compared with the ones in
Table 9).
9. Conclusions
This study has analyzed the navigation performance of a lunar rover utilizing the Lunar Communication and Navigation Services (LCNS) in combination with additional sensors, including an Inertial Measurement Unit (IMU) and a Digital Elevation Model (DEM). The results demonstrate that standalone LCNS navigation suffers from degraded accuracy due to frequent periods of limited satellite visibility. However, integrating supplementary sensors significantly improves positioning performance.
Specifically, the inclusion of a DEM is the key factor, enhancing horizontal positioning accuracy and effectively acting as an additional virtual satellite. The integration of an IMU further contributes to refining velocity estimation, though its benefits are most evident when combined with the DEM. The full sensor suite (LCNS + DEM + IMU) of course achieves the best results, but a reasonable accuracy can be obtained when even giving up the IMU.
A Monte Carlo analysis confirms the robustness of these findings, demonstrating that the proposed sensor fusion approach yields reliable and repeatable improvements in navigation accuracy. Additionally, convergence analysis indicates that even with large initial uncertainties, the filter can provide an accurate position estimate within approximately 35 min. These results highlight the importance of multi-sensor integration for lunar surface navigation, providing a practical pathway for achieving high-accuracy localization in future lunar exploration missions.



 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}