
Structural Parameter Optimization of the Vector Bracket in a Vertical Takeoff and Landing Unmanned Aerial Vehicle

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Structure of the Considered UAV
2.2. Vector Bracket Manufacturing
2.3. Range of Structural Parameters
2.4. Numerical Simulation Method
2.4.1. Fluid Control Equation
2.4.2. Turbulence Model
2.4.3. Multiple Reference Frame Model
2.4.4. Flow Field Model and Meshing
2.5. Optimization Approach
2.5.1. Structural Parameter Optimization Process
2.5.2. Central Composite Experimental Design
2.5.3. Kriging-Algorithm-Based RSMs
Response Surface Methodology (RSM)
2.6. MOGA Optimization
- (1)
- Initial Population of Multi-Objective Genetic Algorithm (MOGA)The initial population is used to run the Multi-Objective Genetic Algorithm (MOGA).
- (2)
- MOGA Generates New PopulationsThe Multi-Objective Genetic Algorithm is executed to generate new populations through crossover and mutation. After the first iteration, each population is run when it reaches the number of samples defined by the “number of samples per iteration” attribute.
- (3)
- Design Point UpdateThe design points are updated in the new population.
- (4)
- Convergence VerificationConvergence verification is conducted for the optimization process:
- (a)
- YES: Optimization has convergedThe Multi-Objective Genetic Algorithm converges when the maximum allowable Pareto percentage or convergence stability percentage is reached.
- (b)
- NO: Optimization has not convergedIf the optimization does not converge, the process proceeds to the next step.
- (5)
- Stopping Criterion VerificationIf the optimization has not converged, it is verified whether the stopping criterion is met:
- (a)
- YES: Stopping criterion is metWhen the “maximum number of iterations” criterion is met, the process will stop even if convergence is not achieved.
- (b)
- NO: Stopping criterion is not metIf the stopping criterion is not met, the Multi-Objective Genetic Algorithm will be run again to generate new populations (return to Step 2).
- (1)
- Generational Distance:
- (2)
- Inverted Generational Distance:
2.7. Validation
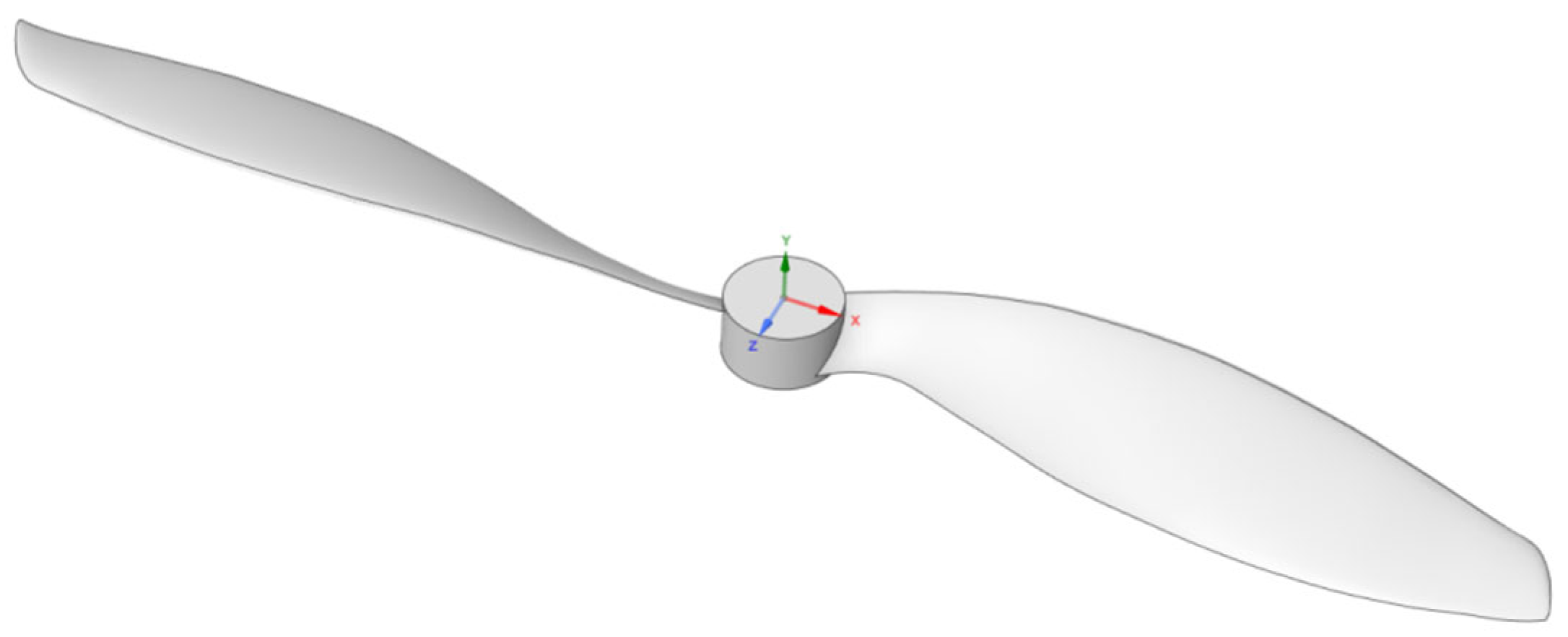
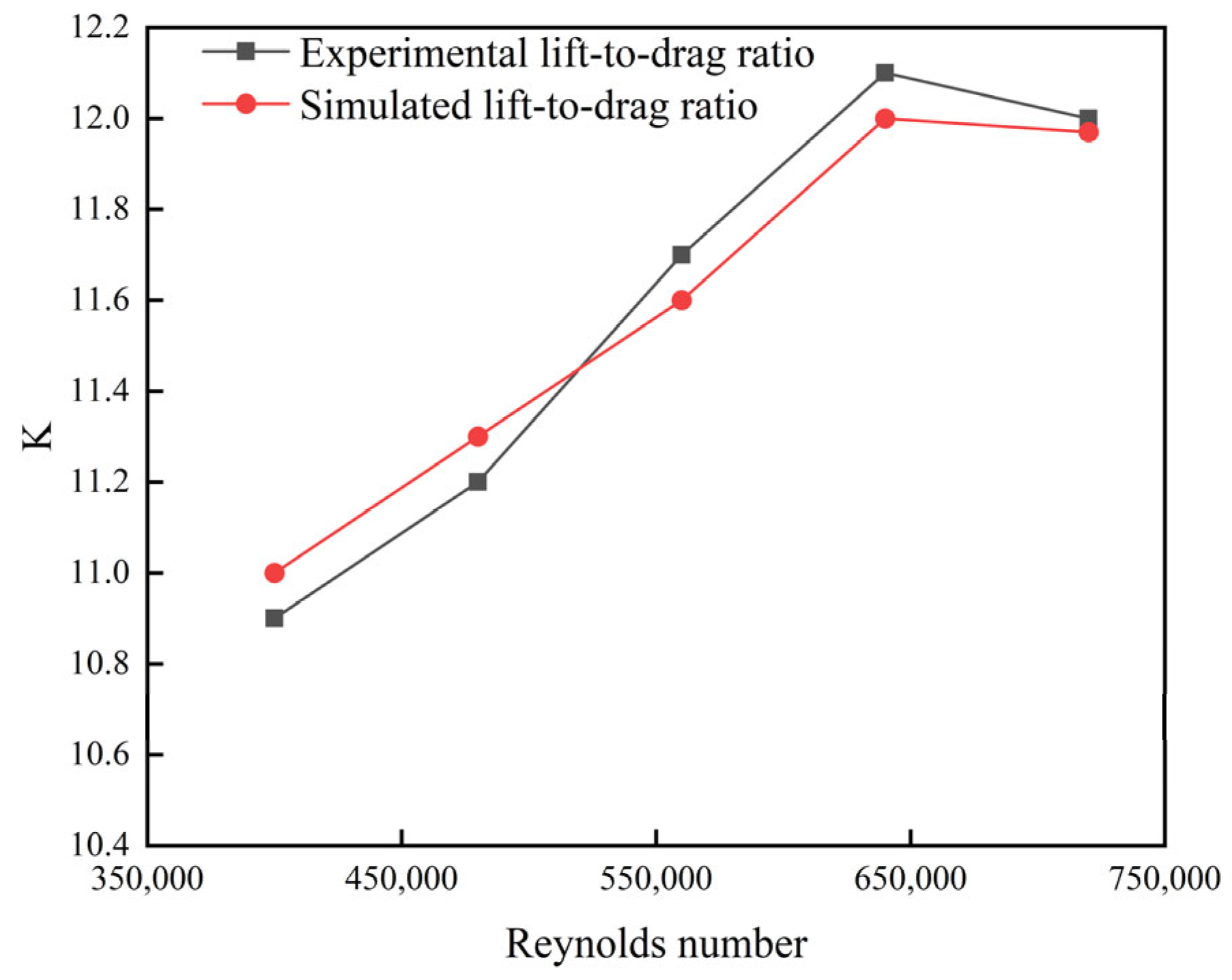
2.7.1. Validation of Propeller Data
- (1)
- Computational model
- (2)
- Mesh independence verification
- (3)
- Method validation
2.7.2. UAV Validation
- (1)
- Mesh independence verification
- (2)
- Method validation
3. Results and Discussion
3.1. Impacts of Structural Parameters
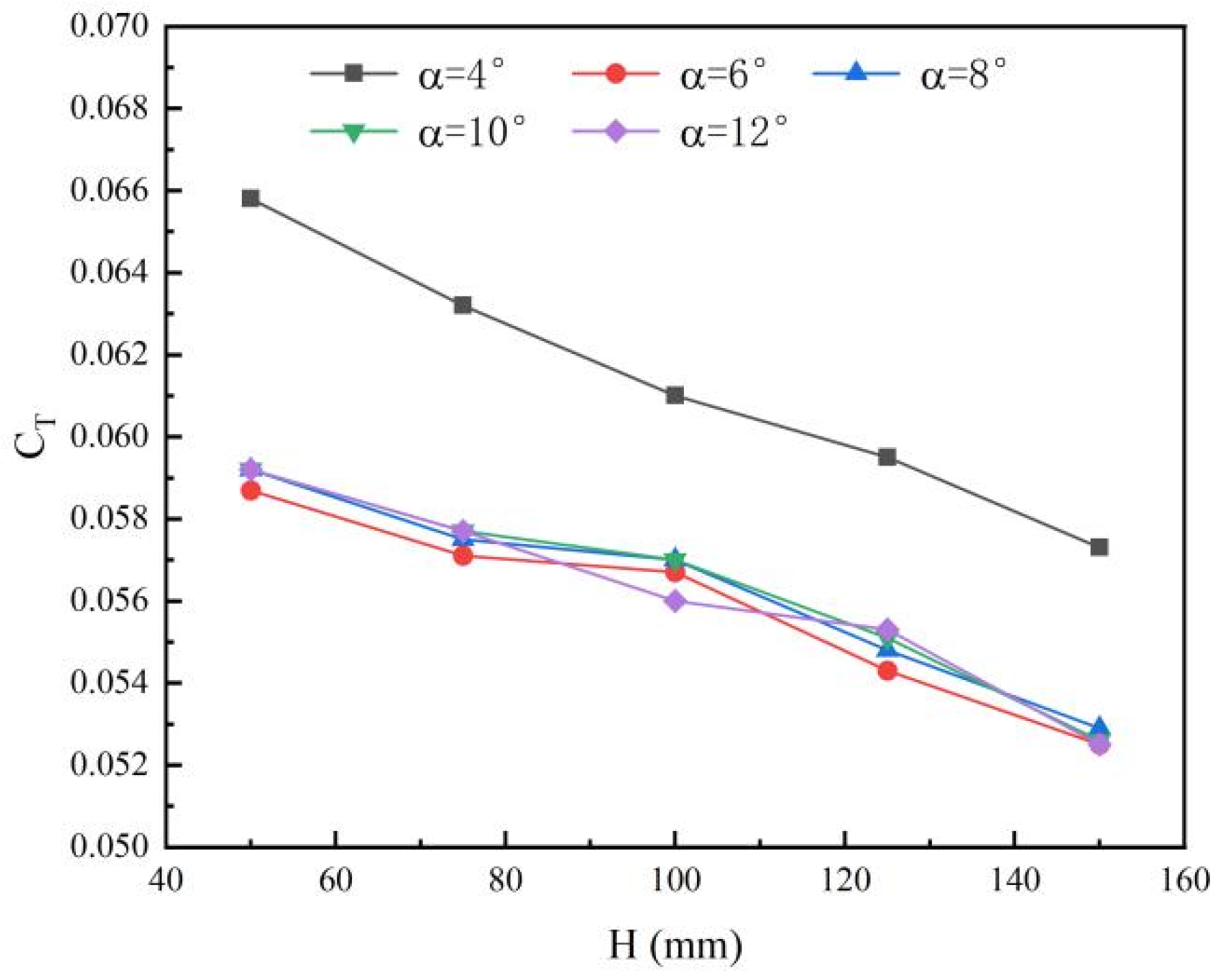
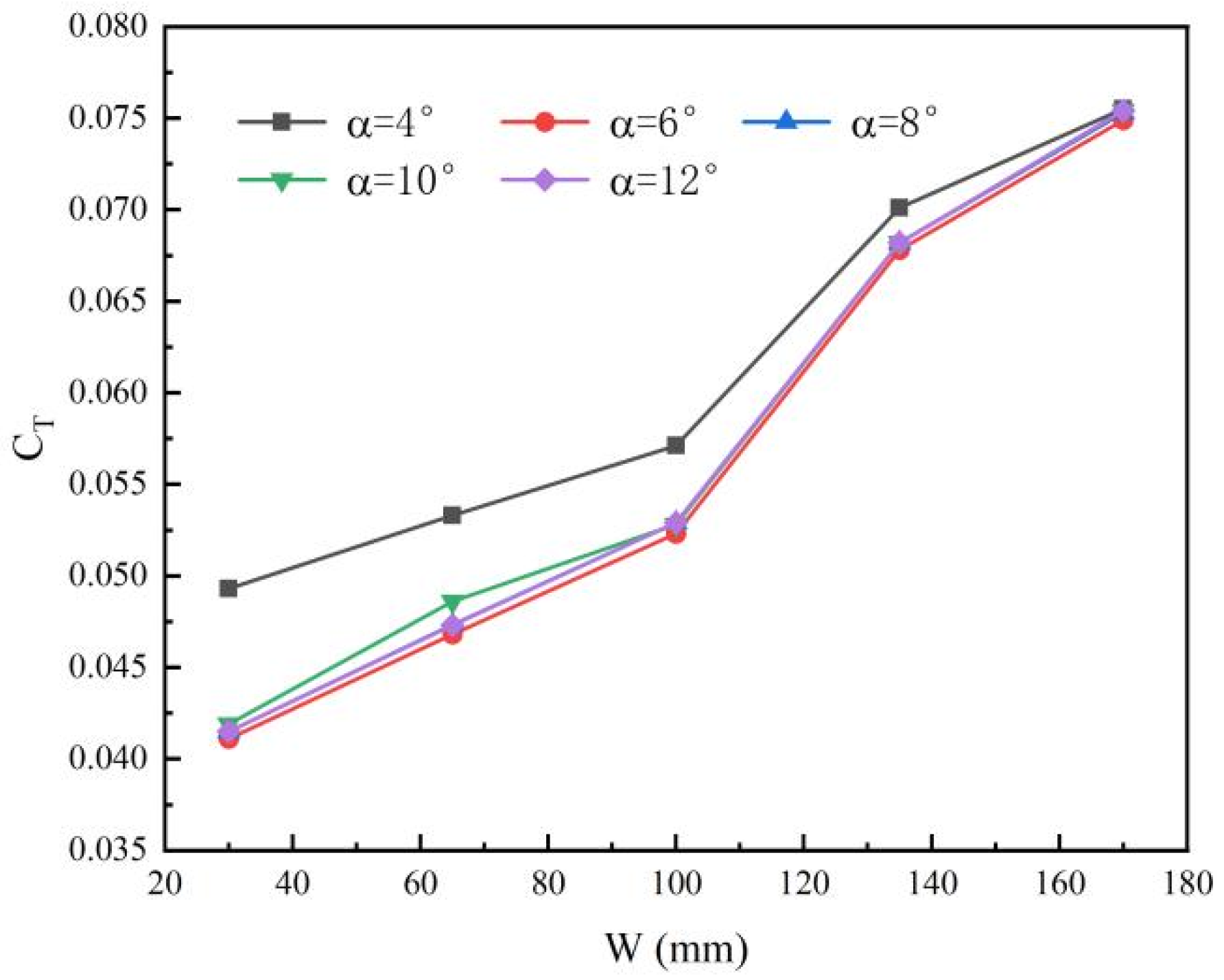
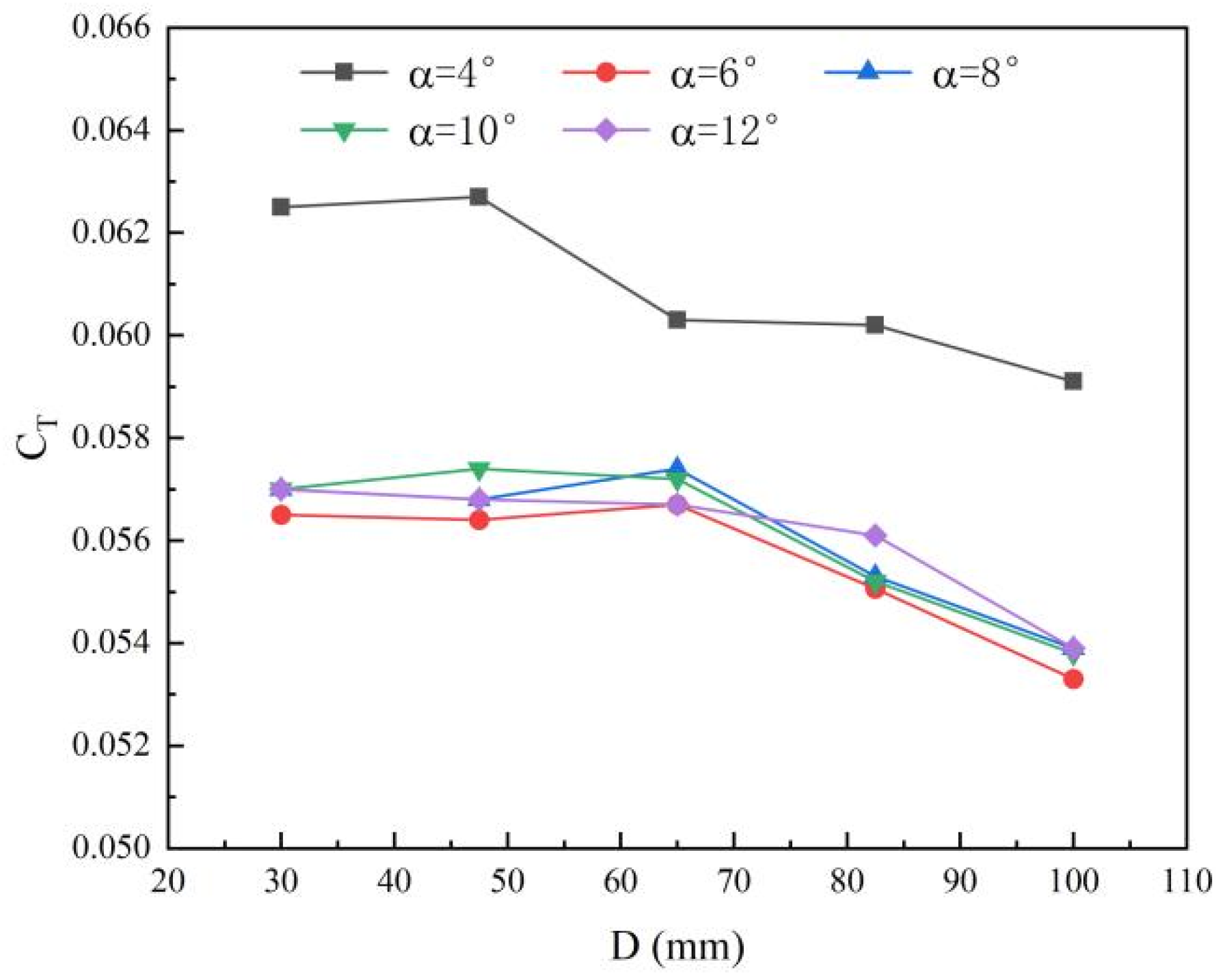
3.1.1. Propeller Thrust Coefficient
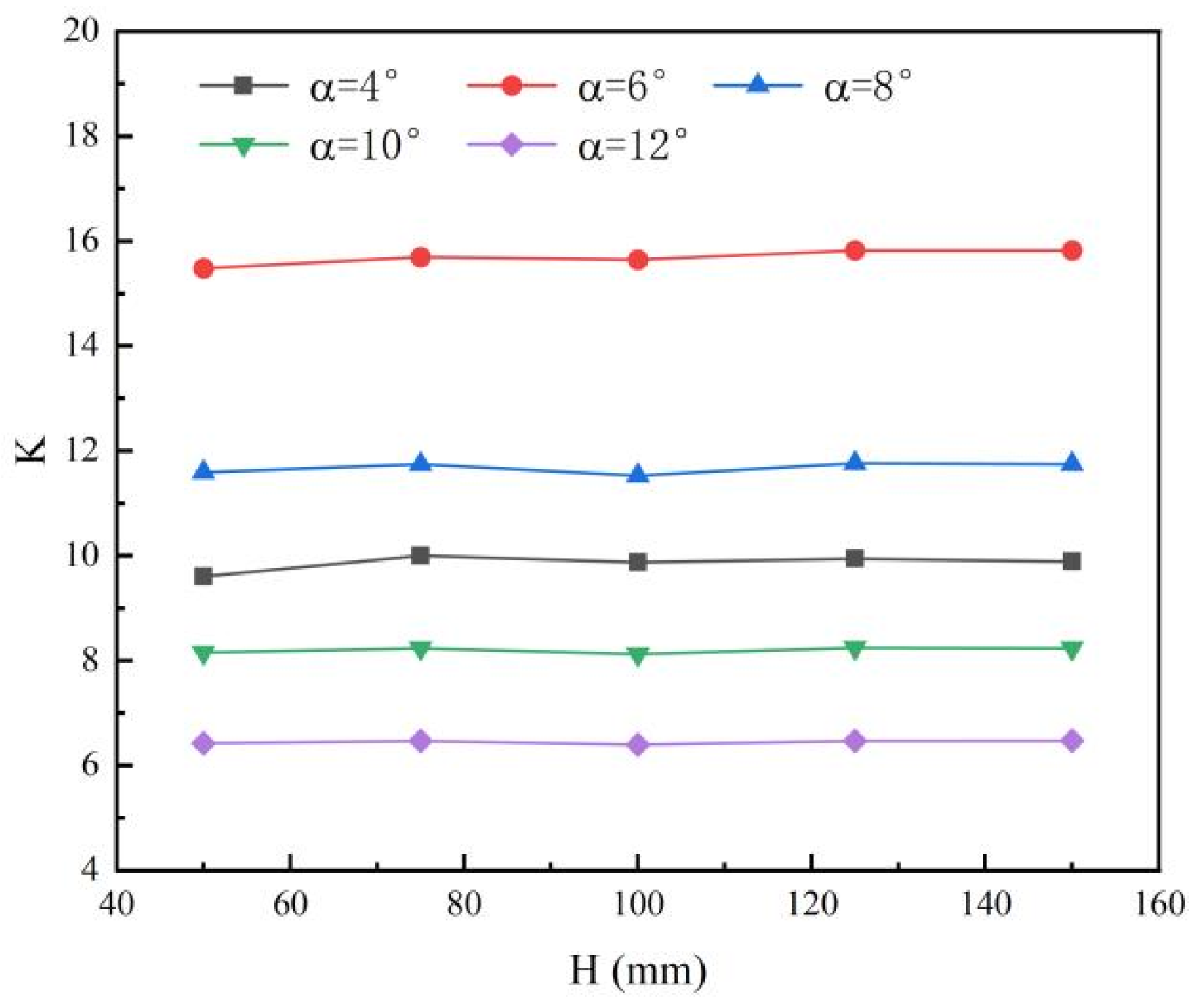
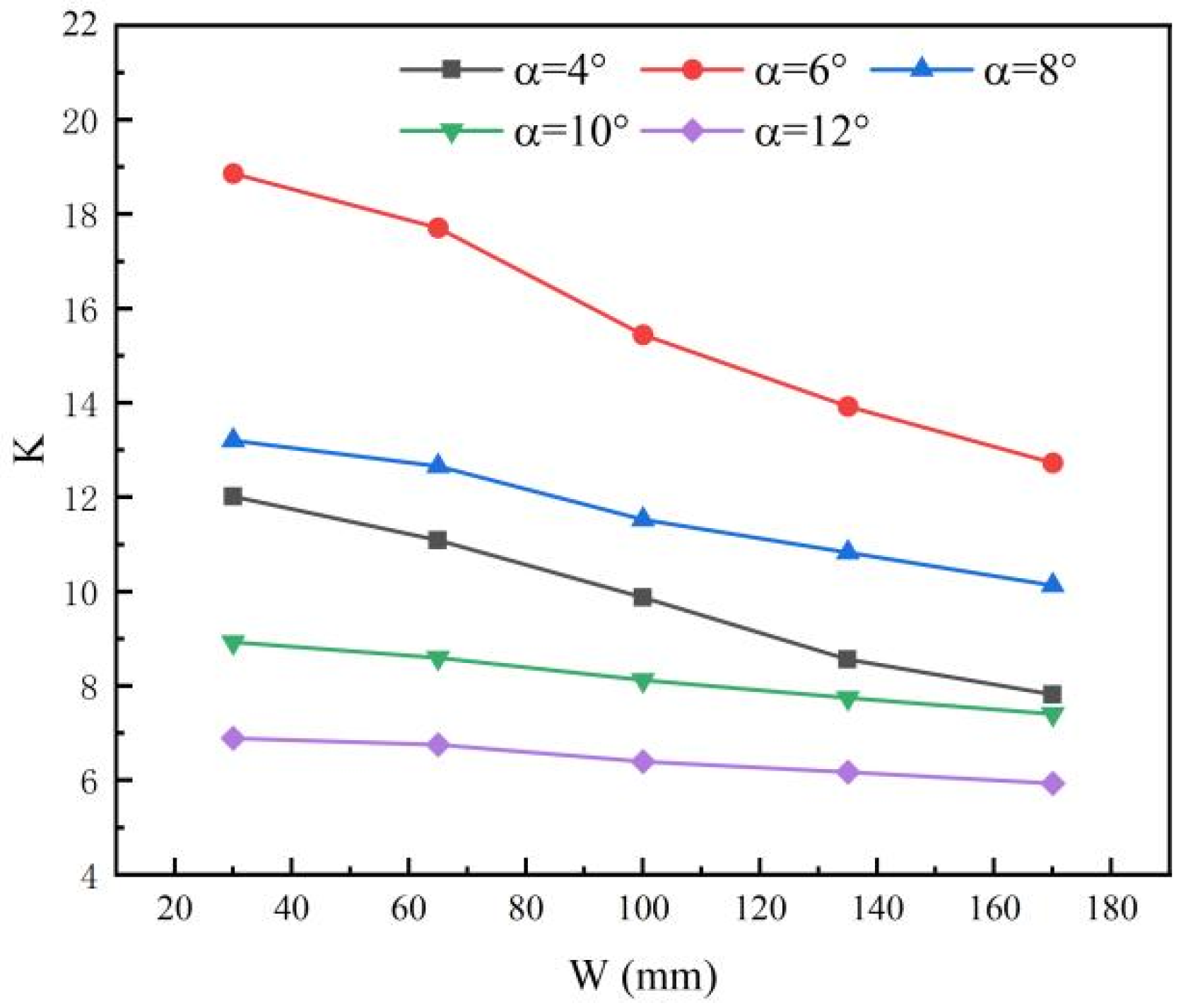
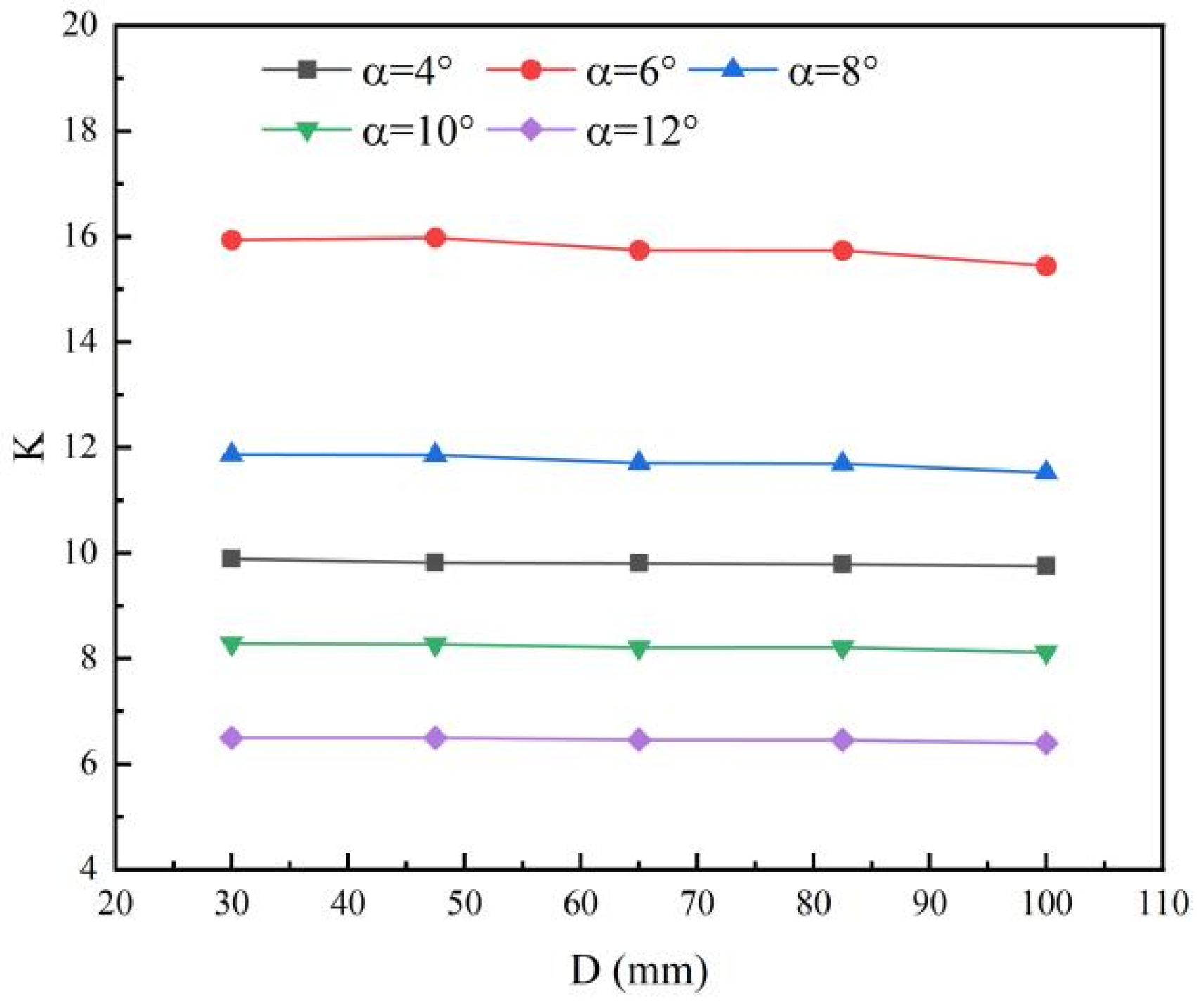
3.1.2. Lift-to-Drag Ratio
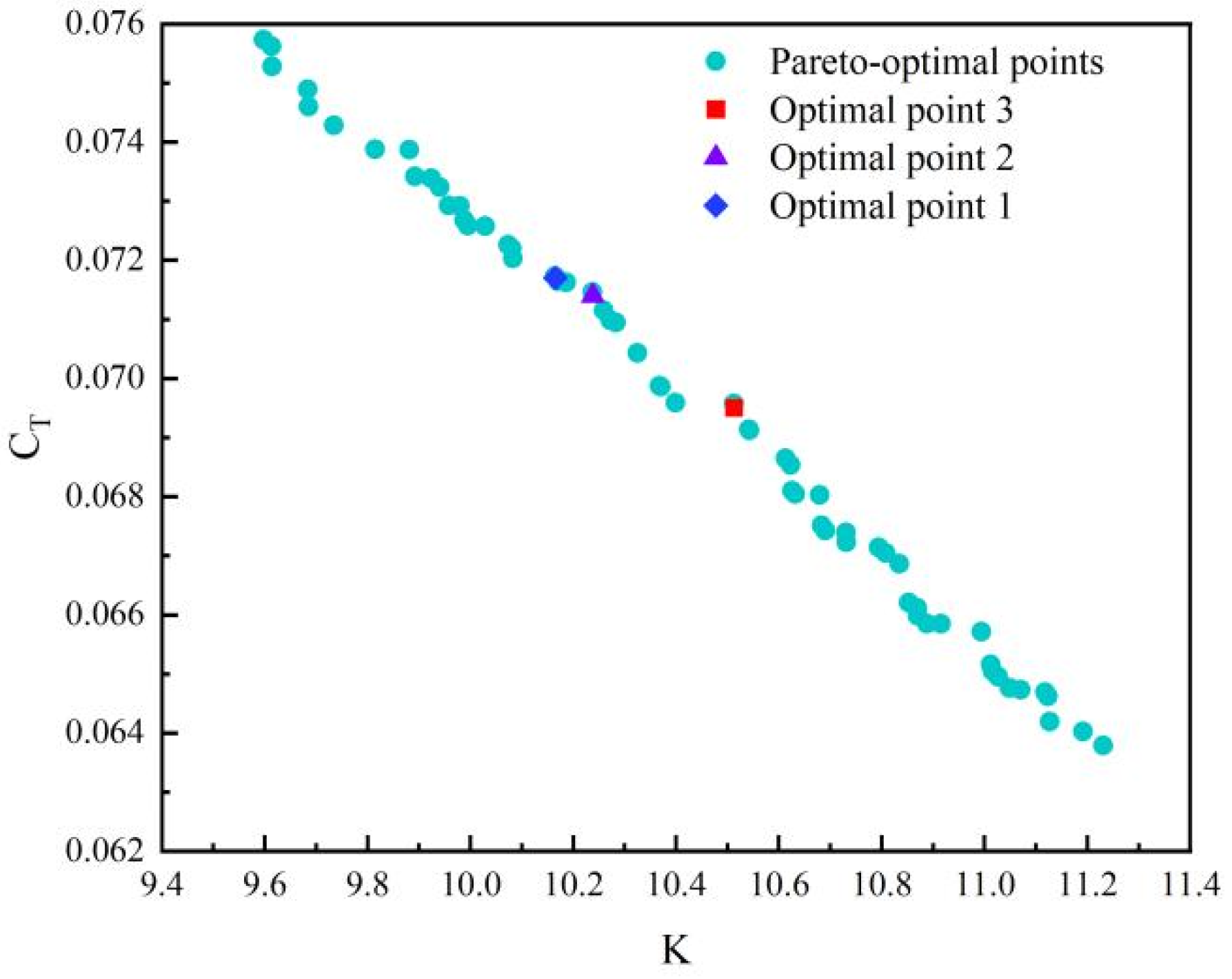
3.2. Multi-Objective Optimization
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kumar, S.P.; Subeesh, A.; Jyoti, B.; Mehta, C.R. Applications of Drones in Smart Agriculture. In Smart Agriculture for Developing Nations: Status, Perspectives and Challenges; Springer Nature: Singapore, 2023. [Google Scholar] [CrossRef]
- Cheng, M.; Sun, C.; Nie, C.; Liu, S.; Yu, X.; Bai, Y.; Liu, Y.; Meng, L.; Jia, X.; Liu, Y.; et al. Evaluation of UAV—Based Drought Indices for Crop Water Conditions Monitoring: A Case Study of Summer Maize. Agric. Water Manag. 2023, 287, 108442. [Google Scholar] [CrossRef]
- Eladl, S.G.; ZainEldin, H.Y.; Haikal, A.Y.; Saafan, M.M. Smart Agriculture Based On IOT Using Drones: A Survey. Mansoura Eng. J. 2024, 49, 10. [Google Scholar] [CrossRef]
- Nduku, L.; Munghemezulu, C.; Mashaba-Munghemezulu, Z.; Kalumba, A.M.; Chirima, G.J.; Masiza, W.; De Villiers, C. Global Research Trends for Unmanned Aerial Vehicle Remote Sensing Application in Wheat Crop Monitoring. Geomatics 2023, 3, 115–136. [Google Scholar] [CrossRef]
- Ndlovu, H.S.; Odindi, J.; Sibanda, M.; Mutanga, O. A Systematic Review on the Application of UAV—Based Thermal Remote Sensing for Assessing and Monitoring Crop Water Status in Crop Farming Systems. Int. J. Remote Sens. 2024, 45, 4923–4960. [Google Scholar] [CrossRef]
- Li, B.; Sun, J.; Zhou, W.; Wen, C.-Y.; Low, K.H.; Chen, C.-K. Transition Optimization for a VTOL Tail-Sitter UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2534–2545. [Google Scholar] [CrossRef]
- Li, H.; Liu, K. Aerodynamic Design Optimization and Analysis of Ducted Fan Blades in DEP UAVs. Aerospace 2023, 10, 153. [Google Scholar] [CrossRef]
- Czyba, R.; Lemanowicz, M.; Gorol, Z.; Kudala, T. Construction Prototyping, Flight Dynamics Modeling, and Aerodynamic Analysis of Hybrid VTOL Unmanned Aircraft. J. Adv. Transp. 2018, 2018, 7040531. [Google Scholar] [CrossRef]
- Lee, S.; Oh, S.; Choi, S.; Lee, Y.; Park, D. Numerical Analysis on Aerodynamic Performances and Characteristics of Quad Tilt Rotor During Forward Flight. J. Korean Soc. Aeronaut. Space Sci. 2018, 46, 197–209. [Google Scholar] [CrossRef]
- Karali, H.; Inalhan, G.; Tsourdos, A. Advanced UAV Design Optimization Through Deep Lea-rning-Based Surrogate Models. Aerospace 2024, 11, 669. [Google Scholar] [CrossRef]
- Laghari, A.A.; Jumani, A.K.; Laghari, R.A.; Nawaz, H. Unmanned Aerial Vehicles: A Review. Cogn. Robot. 2023, 3, 8–22. [Google Scholar] [CrossRef]
- Shirazi, M.; Khademalrasoul, A.; Ardebili, S.M.S. Multi-Objective Optimization of Soil Erosion Parameters Using Response Surface Method (RSM) in the Emamzadeh Watershed. Acta Geophys. 2020, 68, 505–517. [Google Scholar] [CrossRef]
- Verma, A.; Sharma, S.; Pramanik, H. Rapid Identification of Optimized Process Parameters via RSM for the Production of Valuable Aromatic Hydrocarbons Using Multiphase Catalytic Pyrolysis of Mixed Waste Plastics. Arab. J. Sci. Eng. 2023, 48, 16527–16542. [Google Scholar] [CrossRef]
- Powar, R.V.; Aware, V.V.; Shahare, P.U. Optimizing Operational Parameters of Finger Millet Threshing Drum Using RSM. J. Food Sci. Technol. 2019, 56, 3481–3491. [Google Scholar] [CrossRef]
- Eskandari, B.; Bhowmick, S.; Alpas, A.T. Turning of Inconel 718 Using Liquid Nitrogen: Multi-Objective Optimization of Cutting Parameters Using RSM. Int. J. Adv. Manuf. Technol. 2022, 120, 3077–3101. [Google Scholar] [CrossRef]
- Li, B.; Tian, X.; Zhang, M. Modeling and Multi-Objective Optimization of Cutting Parameters in High-Speed Milling Using RSM and Improved TLBO Algorithm. Int. J. Adv. Manuf. Technol. 2020, 111, 2323–2335. [Google Scholar] [CrossRef]
- Negemiya, A.A.; Rajakumar, S.; Balasubramanian, V. Optimization of Ti-6Al-4V/AISI304 Diffusion Bonding Process Parameters Using RSM and PSO Algorithm. Multidiscip. Model. Mater. Struct. 2019, 15, 1037–1052. [Google Scholar] [CrossRef]
- Zhu, W.; Yu, X.; Wang, Y. Layout Optimization for Blended Wing Body Aircraft Structure. Int. J. Aeronaut. Space Sci. 2019, 20, 879–890. [Google Scholar] [CrossRef]
- Panwar, V.; Sharma, D.K.; Kumar, K.V.P.; Jain, A.; Thakar, C. Experimental Investigations and Optimization of Surface Roughness in Turning of EN 36 Alloy Steel Using Response Surface Methodology and Genetic Algorithm. Mater. Today Proc. 2021, 46, 6474–6481. [Google Scholar] [CrossRef]
- Park, G.; Oh, K.Y.; Nam, W. Parent Nested Optimizing Structure for Vibration Reduction in Floating Wind Turbine Structures. J. Mar. Sci. Eng. 2020, 8, 876. [Google Scholar] [CrossRef]
- Ebrahimi, M.J.; Pasandidehfard, M.; Esmaeili, A.; Esfandabadi, M.H.M. Optimization of Aerodynamic Design of a Winged UAV Through Genetic Algorithms and Large Eddy Simulation. Int. J. Aerosp. Eng. 2024, 2024, 2698950. [Google Scholar] [CrossRef]
- Zhang, Z.; Xie, C.; Huang, K.; Yang, C. Influence of Aerodynamic Interaction on Performance of Contrarotating Propeller/Wing System. Aerospace 2022, 9, 813. [Google Scholar] [CrossRef]
- Sun, C.; Zhao, W. Analysis of Aerodynamic Interaction Between Mounted Propeller and Twin-Tailboom UAV. J. Ordnance Equip. Eng. 2021, 42, 118–122. [Google Scholar]
- Shi, W.; Li, J. Impacts of Propeller Installation Effect on Aerodynamic Performances for UAV. J. Aero-Space Power 2020, 35, 611–619. [Google Scholar]
- Shi, W.; Li, J.; Zhao, S.; Yang, Z. Investigation and Improvement of Pusher-Propeller Installation Effect for Flying Wing UAV. Int. J. Aeronaut. Space Sci. 2021, 22, 287–302. [Google Scholar] [CrossRef]
- Guo, Q.; Zhu, Y.; Tang, Y.; Hou, C.; He, Y.; Zhuang, J.; Zheng, Y.; Luo, S. CFD simulation and experimental verification of the spatial and temporal distributions of the downwash airflow of a quad-rotor agricultural UAV in hover. Comput. Electron. Agric. 2020, 172, 105343. [Google Scholar] [CrossRef]
- Yashwanth, C.; Anushkka, V.; Datthathireyan, K.D.; Srinithi, M.; Aamir, H.; Kumar, G.D.; Arulmozhi, K. Computational Fluid Dynamics Analysis of a Coaxial Unmanned Aerial Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2024. [Google Scholar] [CrossRef]
- Zhang, Z. Structure Design of Tailstock Vertical Take-Off and Landing UAV. Master’s Thesis, Henan University of Technology, Zhengzhou, China, 2020. [Google Scholar]
- Chang, M.; Zheng, Z.; Meng, X.; Bai, J.; Wang, B. Aerodynamic Analysis of a Low-Speed Tandem-Channel Wing for eVTOL Air-craft Considering Propeller–Wing Interaction. Energies 2022, 15, 8616. [Google Scholar] [CrossRef]
- Sikirica, A.; Čarija, Z.; Kranjčević, L.; Lučin, I. Grid Type and Turbulence Model Influence on Propeller Characteristics Prediction. J. Mar. Sci. Eng. 2019, 7, 374. [Google Scholar] [CrossRef]
- Ameen, F.; Mathivanan, K.; Zhang, R.; Ravi, G.; Rajasekar, S. One Factor at a Time and Two-Factor Optimization of Transesterification Parameters Through Central Composite Design (CCD) for the Conversion of Used Peanut Oil (UPNO) to Biodiesel. Fuel 2023, 352, 129065. [Google Scholar] [CrossRef]
- Toal, D.J.J. Applications of multi-fidelity multi-output Kriging to engineering design optimization. Struct. Multidiscip. Optim. 2023, 66, 125. [Google Scholar] [CrossRef]
- Yao, X.; Liu, W.; Han, W.; Li, G.; Ma, Q. Development of Response Surface Model of Endurance Time and Structural Parameter Optimization for a Tail-Sitter UAV. Sensors 2020, 20, 1766. [Google Scholar] [CrossRef]
- Verma, S.; Pant, M.; Snasel, V. A Comprehensive Review on NSGA-II for Multi-Objective Combinatorial Optimization Problems. IEEE Access 2021, 9, 57757–57791. [Google Scholar] [CrossRef]
- Ma, H.; Zhang, Y.; Sun, S.; Liu, T.; Shan, Y. A Comprehensive Survey on NSGA-II for Multi-Objective Optimization and Applications. Artif. Intell. Rev. 2023, 56, 15217–15270. [Google Scholar] [CrossRef]
- Brandt, J.B. Small-Scale Propeller Performance at Low Speeds. Master’s Thesis, University of Illinois at Urbana-Champaign, Champaign-Urbana, IL, USA, 2005. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Wingspan (mm) | 1200 |
| Wing root chord (mm) | 500 |
| Wing tip chord (mm) | 300 |
| Wing sweep angle (°) | 28 |
| Spanwise length at the winglet tip (mm) | 280 |
| Winglet sweep angle (°) | 56 |
| Winglet height (mm) | 30 |
| Winglet thickness (mm) | 6 |
| Winglet support foot length (mm) | 200 |
| UAV flight angle of attack (°) | 4–12 |
| Structural Parameter | Lower Limit | Upper Limit |
|---|---|---|
| Fixed bracket length L (mm) | 30 | 170 |
| Fixed bracket width W (mm) | 30 | 170 |
| Vector bracket height H (mm) | 50 | 150 |
| Ball socket outer diameter D (mm) | 30 | 100 |
| Propeller Parameter | Value |
|---|---|
| Model | APC Slow Flyer |
| Rotational diameter (mm) | 254 |
| Pitch (mm) | 177.8 |
| Hub diameter (mm) | 18 |
| Hub height (mm) | 10 |
| Mesh Count (Millions) | Thrust Coefficient |
|---|---|
| 1.76 | 0.146 |
| 1.85 | 0.1465 |
| 1.93 | 0.1471 |
| 2.08 | 0.1477 |
| 2.12 | 0.148 |
| Mesh Count (Millions) | Lift-to-Drag Ratio |
|---|---|
| 111 | 11.8 |
| 121 | 11.86 |
| 142 | 11.89 |
| 186 | 11.94 |
| 224 | 12 |
| Parameter | Original Model | Optimal Point 1 | Validate 1 Optimal | Optimal Point 2 | Validate 2 Optimal | Optimal Point 3 | Validate 3 Optimal |
|---|---|---|---|---|---|---|---|
| H | 100 | 50.92 | 51.19 | 56.32 | |||
| L | 100 | 169.65 | 168.38 | 169.5 | |||
| W | 100 | 65.47 | 68.9 | 70.32 | |||
| D | 65 | 31.63 | 30.95 | 30.07 | |||
| CT | 0.06 | 0.0695 | 0.0691 | 0.0714 | 0.0711 | 0.0717 | 0.0701 |
| Optimization gain (%) | - | 15.8 | 0.5 | 19 | 0.4 | 19.5 | 2.2 |
| 9.87 | 10.513 | 10.211 | 10.238 | 9.882 | 10.165 | 9.938 | |
| Optimization gain (%) | - | 6.5 | 2.9 | 3.7 | 3.6 | 2.9 | 2.28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Quan, W.; Wang, J.; Yao, X.; Liu, Q.; Liu, Q.; Tian, Y. Structural Parameter Optimization of the Vector Bracket in a Vertical Takeoff and Landing Unmanned Aerial Vehicle. Aerospace 2025, 12, 487. https://doi.org/10.3390/aerospace12060487
Liu W, Quan W, Wang J, Yao X, Liu Q, Liu Q, Tian Y. Structural Parameter Optimization of the Vector Bracket in a Vertical Takeoff and Landing Unmanned Aerial Vehicle. Aerospace. 2025; 12(6):487. https://doi.org/10.3390/aerospace12060487
Chicago/Turabian StyleLiu, Wenshuai, Wenyong Quan, Junli Wang, Xiaomin Yao, Qingzheng Liu, Qiang Liu, and Yuxiang Tian. 2025. "Structural Parameter Optimization of the Vector Bracket in a Vertical Takeoff and Landing Unmanned Aerial Vehicle" Aerospace 12, no. 6: 487. https://doi.org/10.3390/aerospace12060487
APA StyleLiu, W., Quan, W., Wang, J., Yao, X., Liu, Q., Liu, Q., & Tian, Y. (2025). Structural Parameter Optimization of the Vector Bracket in a Vertical Takeoff and Landing Unmanned Aerial Vehicle. Aerospace, 12(6), 487. https://doi.org/10.3390/aerospace12060487