
A Refined Space Environment Index for the Characterization of In-Orbit Fragmentations †



Abstract
1. Introduction
2. Materials and Methods
2.1. Improving the FEI
Optical Detection Performance
- arcsec/s;
- arcsec/s;
- arcsec/s.
2.2. Radar Detection Performance
- , the peak transmit power specified at the output of the transmitter, measured in watts (W) (as a reference, the EISCAT Svalbard Radar (ESR) located in Longyearbyen, Svalbard, has a peak transmit power of 1 M [17]);
- and , the transmit and receive antenna transmitting gains (around 40–50 dBi for EISCAT [17]);
- , the operating radar wavelength in meters (m)
- k, the Boltzmann constant, equal to ×
- , a reference temperature in kelvin (K), usually set to K
- B, the effective noise bandwidth of the radar. It is measured in hertz (Hz) (during beam-park experiments conducted at EISCAT, this amounted to 45 Hz for 10 pulses integrated together [18]).
- , the radar noise figure. It is dimensionless (more information on the radar noise figure can be found in [19]).
- L, a factor that takes into account losses that need to be considered when using the radar range equation, such as the antenna and feed losses. This is dependent on the antenna under consideration.
A New Radar Weight
- compute the corresponding expected SNR for a given fragment of size at a given fragmentation altitude , ;
- address its detectability, meaning check whether:
- in case the above inequality holds true, compute the weight:
3. Results
3.1. 450 km Altitude Fragmentation
3.1.1. Global CSI
3.1.2. Cloud CSI
3.1.3. FEI
3.2. 1200 km Altitude Fragmentation
3.2.1. Global CSI
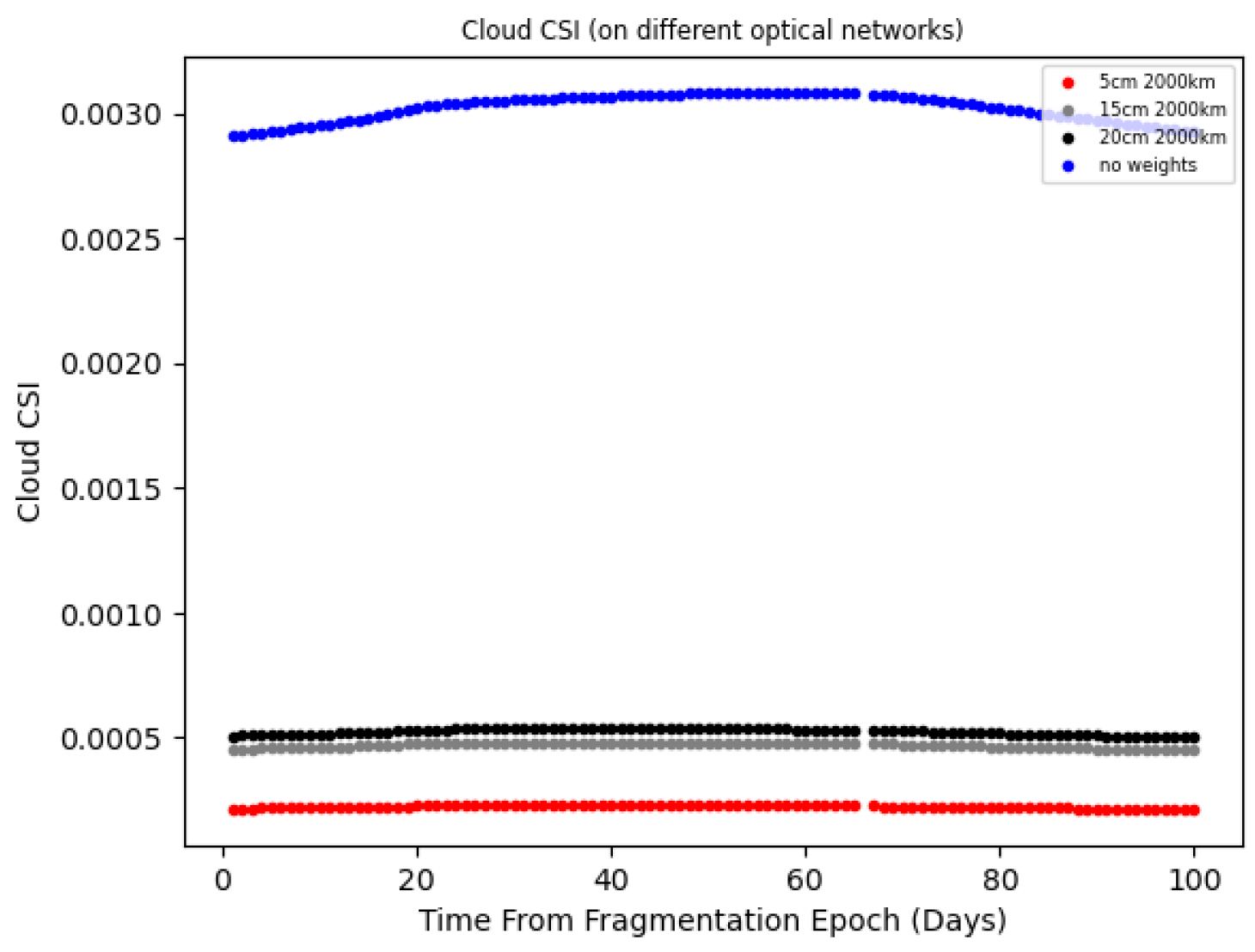
3.2.2. Cloud CSI
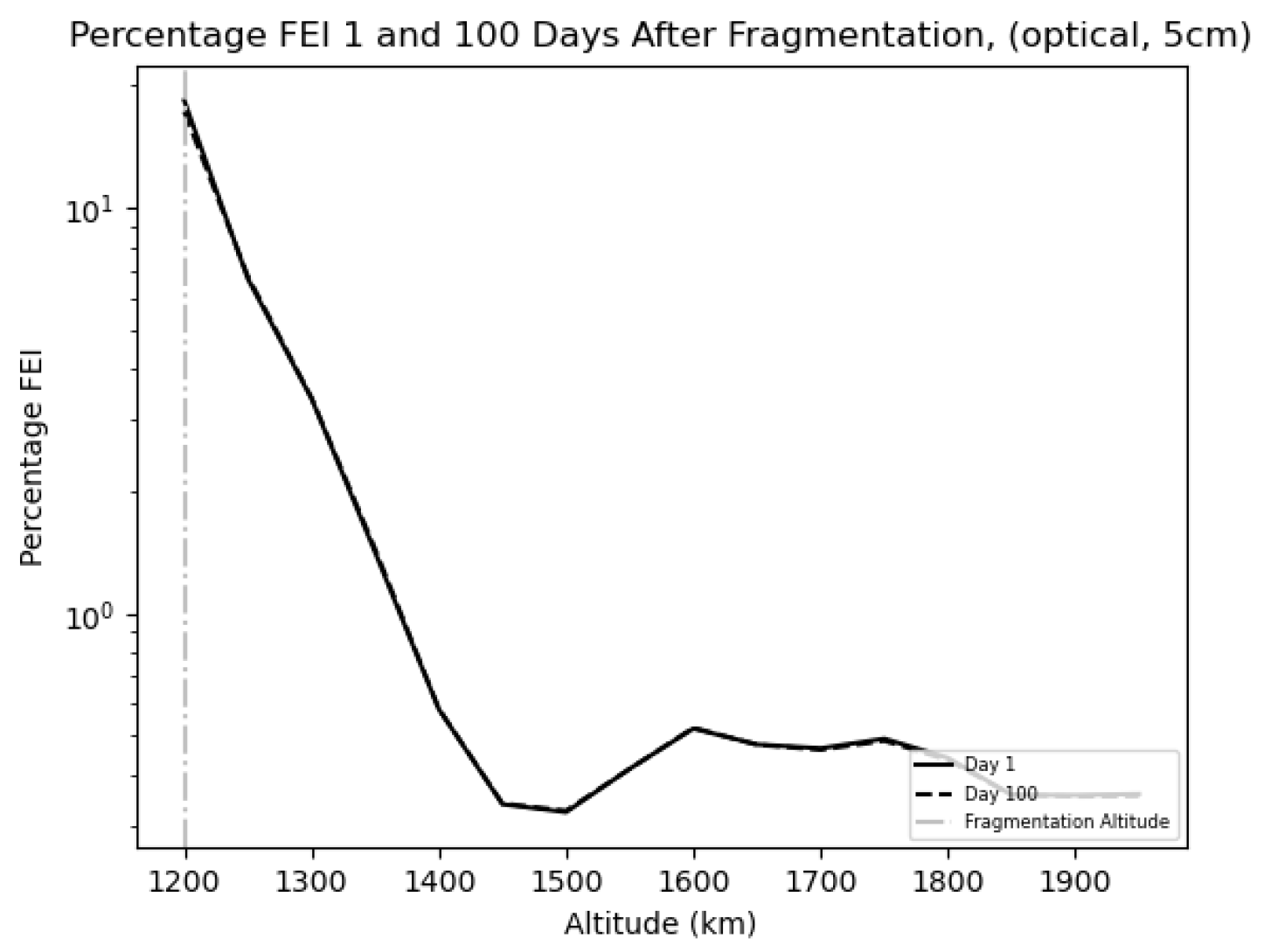
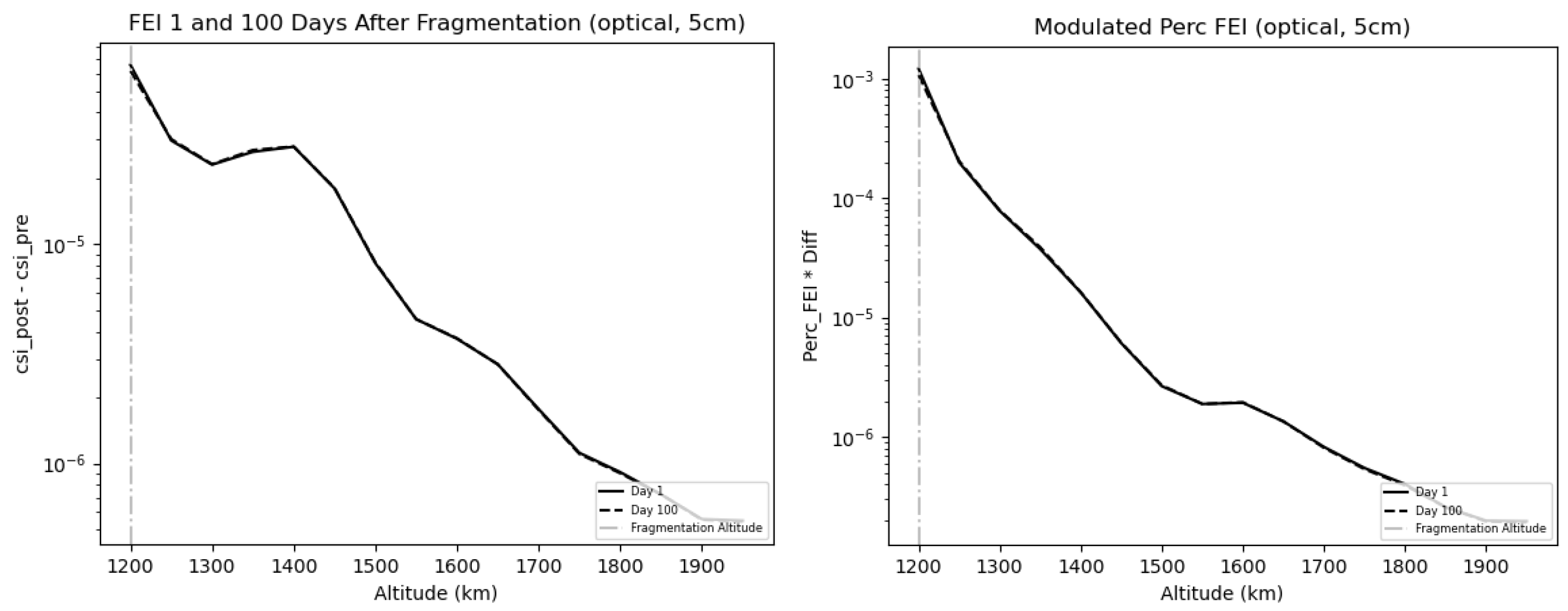
3.2.3. FEI
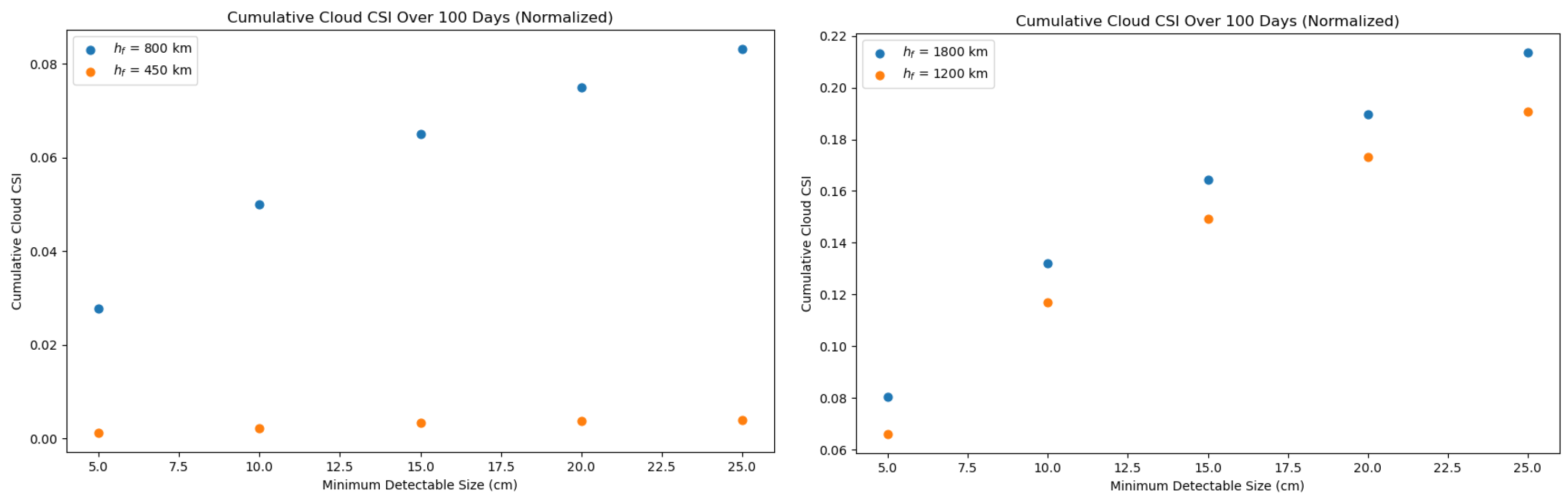
3.3. A Cumulative Index for Fragmentation Ranking
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rossi, A.; Anselmo, L.; Pardini, C.; Jehn, R.; Valsecchi, G.B. The new space debris mitigation (SDM 4.0) long term evolution code. In Proceedings of the 5th European Conference on Space Debris, Darmstadt, Germany, 30 March–2 April 2009. [Google Scholar]
- Rossi, A.; Petit, A.; McKnight, D. Short-term space safety analysis of LEO constellations and clusters. Acta Astronaut. 2020, 175, 476–483. [Google Scholar] [CrossRef]
- Dimare, L.; Cicalò, S.; Rossi, A.; Alessi, E.; Valsecchi, G.B. In-orbit fragmentation characterization and parent bodies identification by means of orbital distances. In Proceedings of the First International Orbital Debris Conference, Sugar Land, TX, USA, 9–12 December 2019. [Google Scholar]
- Rossi, A.; Valsecchi, G.B.; Alessi, E.M. The Criticality of Spacecraft Index. Adv. Space Res. 2015, 56, 449–460. [Google Scholar] [CrossRef]
- Bombardelli, C.; Alessi, E.M.; Rossi, A.; Valsecchi, G.B. Environmental effect of space debris repositioning. Adv. Space Res. 2017, 60, 28–37. [Google Scholar] [CrossRef]
- Rossi, A.; Vellutini, E.; Alessi, E.M.; Schettino, G.; Ruch, V.; Dolado Perez, J.C. Environmental index for fragmentation impact and environment evolution analysis. J. Space Saf. Eng. 2022, 9, 269–273. [Google Scholar] [CrossRef]
- Rossi, A.; Alessi, E.M.; Valsecchi, G.B.; Lewis, H.; Radtke, J.; Bombardelli, C.; Bastida Virgili, B. A Quantitative Evaluation of the Environmental Impact of the Mega Constellations. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017. [Google Scholar]
- Letizia, F.; Colombo, C.; Rossi, A.; Muciaccia, A.; Giudici, L.; Harada, R.; Kawamoto, S.; Böttcher, R.; Ruch, V.; Taillan, C. Mission-based and environment-based approaches for assessing the severity of a space debris evolution scenario from a sustainability perspective. In Proceedings of the International Astronautical Congress 2024, Milano, Italy, 14–18 October 2024. [Google Scholar]
- Schildknecht, T. Optical surveys for space debris. Astron. Astrophys. Rev. 2007, 14, 41–111. [Google Scholar] [CrossRef]
- Shell, J. Optimizing Orbital Debris Monitoring with Optical Telescopes. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 14–17 September 2010. [Google Scholar]
- Howell, S.B. Frontmatter. In Handbook of CCD Astronomy; Cambridge Observing Handbooks for Research Astronomers; Cambridge University Press: Cambridge, UK, 2006; pp. i–vi. [Google Scholar]
- Mortara, L.; Fowler, A. Evaluations of Charge-Coupled Device (CCD) Performance for Astronomical Use. In Solid-State Imagers for Astronomy; Geary, J.C., Latham, D.W., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1981; Volume 290, pp. 28–33. [Google Scholar] [CrossRef]
- Pellegrini, R.; Gregori, P.; Cerutti, F.; Dimare, L.; Bernardi, F.; Bracali Cioci, D.; Vellutini, E. SUTED4L-Study for the application of the Flyeye Telescope to the Survey of the High-LEO orbital region. In Proceedings of the 2nd NEO and Debris Detection Conference, Darmstadt, Germany, 24–26 January 2023. [Google Scholar]
- Yurasov, V.; Shargorodskiy, V. Features of space debris survey in LEO utilizing optical sensors. In Proceedings of the 5th European Conference on Space Debris, Darmstadt, Germany, 30 March–2 April 2009. [Google Scholar]
- Sánchez-Ortiz, N.; Nomen Torres, J.; Domínguez-González, R.; Guijarro López, N. Accurate Optical Observation of Space Objects in LEO Regime. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 11–14 September 2018; Ryan, S., Ed.; p. 59. [Google Scholar]
- Crumey, A. Human contrast threshold and astronomical visibility. Mon. Not. R. Astron. Soc. 2014, 442, 2600–2619. [Google Scholar] [CrossRef]
- Muntoni, G.; Montisci, G.; Pisanu, T.; Andronico, P.; Valente, G. Crowded Space: A Review on Radar Measurements for Space Debris Monitoring and Tracking. Appl. Sci. 2021, 11, 1364. [Google Scholar] [CrossRef]
- Vierinen, J.; Kastinen, D.; Markkanen, J.; Grydeland, T.; Kero, J.; Hesselbach, S.; Krag, H. Beam-park observations of space debris with the EISCAT radars. In Proceedings of the First NEO and Debris Detection Conference, Darmstadt, Germany, 22–24 January 2019. [Google Scholar]
- Doerry, A. Noise and Noise Figure for Radar Receivers; Sandia National Laboratories: Albuquerque, NM, USA, 2016. [Google Scholar] [CrossRef]
- Mie, G. Beiträge zur Optik trüber Medien, speziell kolloidaler Metallösungen. Ann. Phys. 1908, 330, 377–445. [Google Scholar] [CrossRef]
- Johnson, N.; Krisko, P.H.; Liou, J.C.; Anz-Meador, P.D. NASA’s New Breakup Model of EVOLVE 4.0. Adv. Space Res. 2001, 28, 1377–1384. [Google Scholar] [CrossRef]
- Milani, A.; Farnocchia, D.; Dimare, L.; Rossi, A.; Bernardi, F. Innovative observing strategy and orbit determination for Low Earth Orbit space debris. Planet. Space Sci. 2012, 62, 10–22. [Google Scholar] [CrossRef]
- Gisolfi, L.; Rossi, A.; Marzari, F. An Upgraded Environmental Index for the SST Fragmentation Service. In Proceedings of the 2nd International Orbital Debris Conference (IOCII), Sugar Land, TX, USA, 4–7 December 2023. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Altitude (km) | Region |
|---|---|
| 0 < h < 500 | Low LEO |
| 500 < h < 1000 | Medium LEO |
| 1000 < h < 2000 | High LEO |
| Region | LLEO | MLEO | HLEO |
|---|---|---|---|
| A | 0.1 | 0.5 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gisolfi, L.; Rossi, A.; Marzari, F. A Refined Space Environment Index for the Characterization of In-Orbit Fragmentations. Aerospace 2025, 12, 483. https://doi.org/10.3390/aerospace12060483
Gisolfi L, Rossi A, Marzari F. A Refined Space Environment Index for the Characterization of In-Orbit Fragmentations. Aerospace. 2025; 12(6):483. https://doi.org/10.3390/aerospace12060483
Chicago/Turabian StyleGisolfi, Luigi, Alessandro Rossi, and Francesco Marzari. 2025. "A Refined Space Environment Index for the Characterization of In-Orbit Fragmentations" Aerospace 12, no. 6: 483. https://doi.org/10.3390/aerospace12060483
APA StyleGisolfi, L., Rossi, A., & Marzari, F. (2025). A Refined Space Environment Index for the Characterization of In-Orbit Fragmentations. Aerospace, 12(6), 483. https://doi.org/10.3390/aerospace12060483