Abstract
Mars has long captivated the human imagination as a potential destination for settlement and scientific exploration. After deploying individual rovers, the next step in our journey to Mars is the autonomous exploration of the Red Planet using a collaborative swarm of rovers, drones, and satellites. This concept paper envisions a sustainable Mars exploration scenario featuring energy-aware, collaborative, and autonomous vehicles, including rovers, drones, and satellites, operating around Mars. The proposed framework is designed to address key challenges in energy management, edge intelligence, communication, sensing, resource-aware task scheduling, and radiation hardening. This work not only identifies these critical areas of research but also proposes novel technological solutions drawn from terrestrial advancements to extend their application to extraterrestrial exploration.
1. Introduction
Mars, alongside the Moon, represents one of the most compelling frontiers in space exploration. The quest to explore Mars is driven by our innate curiosity to uncover the mysteries of the cosmos, seek signs of ancient life, and investigate the possibility of human habitability.
Currently, there are two autonomous vehicles from the National Aeronautics and Space Administration (NASA) actively exploring Mars: Curiosity and Perseverance. Curiosity investigates the Martian climate and geology, searching for signs of planetary habitability [1]. The more recently launched Perseverance rover carries several scientific instruments, cameras, sensors, and the first Mars helicopter Ingenuity [2]. Perseverance collects rock and soil samples with the goal of seeking evidence of former microbial life and preparing for human exploration missions [3].
As listed in Table 1, many other Mars exploration missions are planned worldwide. For example, within the ExoMars program of the European Space Agency (ESA), the Rosalind Franklin rover will search for the existence of past life on Mars by analyzing underground samples [4]. The mission was scheduled to launch in 2022 but due to geopolitical tensions, it will not start before 2028. Another noteworthy mission is the Mars Sample Return mission, in which Perseverance will collect samples using a robotic arm developed by ESA. The mission aims to collect the samples and return them to Martian orbit through the first rocket (Mars Ascent Vehicle) launched from Mars. This will in turn be captured by the Earth Return Orbiter, which finally returns to Earth [5].

Table 1.
Overview of active, inactive, and planned Mars rover missions.
Robustness, flexibility, and scalability represent the key bio-inspired attributes that are desirable in swarm robotic systems [6]. Robustness shows the capacity of the system to withstand variations in different environmental conditions despite failures in the individuals. Flexibility ensures the system’s capacity to provide solutions for diverse tasks through various coordination strategies. Finally, scalability implies the practicality of adjusting the size of a swarm system.
Applying swarm systems on Mars is even more challenging. For swarms to operate on Mars, the system must be highly autonomous, as Mars-to-Earth communications may take as long as 22 min. As a result, for a swarm mission on Mars, not only must robustness, flexibility, and scalability be optimized, but fault detection and diagnosis (FDD) need to be managed by the system itself. Limitations in such a setup imply that the FDD must take place locally, be computationally lightweight, and remain quick and accurate [7].
The goal of this paper is neither to provide a comprehensive literature review on Mars exploration missions like [8,9] nor to present experimental results. Instead, our goal for this concept paper is to provide a futuristic vision of how to explore Mars in a sustainable manner. In the future, we envision that multiple rovers, drones, and satellites will be exploring Mars collaboratively. This raises the idea of collaborative vehicles, with the aim to complete their tasks as effectively and efficiently as possible. As a key contribution to the state of the art, we provide an overview of the research challenges involved with deploying such vehicle swarms on Mars. Inspired by terrestrial-based advancements, we suggest technological solutions for sustainable and efficient robotic exploration of the Red Planet.
The remainder of this paper is visually outlined in Figure 1 and structured as follows. Section 2 describes the expected application scenario in which rovers, drones, and satellites all work together for effective and efficient Mars exploration. Following the key components of NASA’s Mars infrastructure [10], Section 3, Section 4 and Section 5 discuss novel technologies and paradigms for energy management, communication, and collaborative task scheduling, respectively. The way forward is discussed in Section 6 and Section 7 concludes the paper.
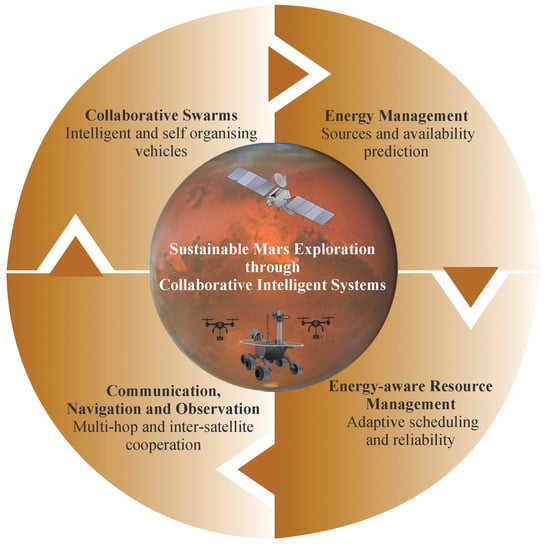
Figure 1.
Overview of key concepts required for collaborative intelligent systems for sustainable Mars exploration in this work.
2. Application Scenario
Imagine a futuristic scenario in which tens or even hundreds of autonomous vehicles are working together on Mars. In this work, the terms autonomous vehicles and swarm encompass the various types of robotic and remote sensing devices used for exploration and research purposes, including rovers on the surface, aerial drones, and satellites orbiting Mars. As we illustrated in Figure 2, this swarm of vehicles facilitates the collection of in situ resources for geological surveys and/or building infrastructure [11]. High-level tasks could include the following:
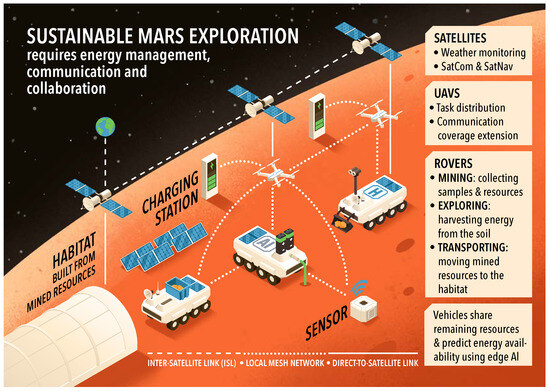
Figure 2.
Visualization of the envisioned scenario with architecture and functional description of the collaborative energy-aware sensors, rovers, drones, and satellites on Mars in this work.
- Explore, monitor, and map remote Martian areas to find useful geological resources.
- Retrieve useful resources and samples, e.g., by drilling holes in the Martian surface.
- Transport resources from measurement locations to a central collection point.
- Construct and maintain habitats, e.g., by 3D printing using collected resources.
- Repair and maintain other vehicles in an autonomous fashion, i.e., search and rescue of a rover.
Cooperation between the robotic explorers currently on Mars is limited. However, as the number of autonomous vehicles increases, there will be a need for more cooperation. As the vehicles are assigned different tasks requiring varying amounts of resources, they will benefit from communication and resource sharing. More specifically, a swarm of vehicles will be able to better deal with resource constraints and energy limitations compared to a scenario in which vehicles need to perform all tasks individually. To illustrate the benefits of vehicle cooperation in the use case of geological surveys (i.e., collecting resources and analyzing samples), the remainder of this section provides some concrete examples.
2.1. Sampling and Mining Rovers
Based on energy availability, distance and Estimated Time of Arrival (ETA) to a location of interest, the swarm of rovers negotiates which rover(s) will collect samples or mine resources. In addition, the rovers communicate their availability to the swarm of autonomous vehicles. Upon task completion, a transporting rover will be selected similarly, which then collects the samples or mined resources and moves them to the Martian base, where other rovers can use them to analyze samples or to build infrastructure. When there is insufficient energy available, rovers will negotiate new task allocations, requesting others to take over. When the ‘next shift’ arrives, the rover stops its task and proceeds to recharge itself.
2.2. Drone Exploration
Another example is the collaboration between rovers and drones. Due to the rough Martian surface, rovers travel extremely slowly. Perseverance holds the current record for the longest single-day drive: 319 m in one sol (i.e., Martian day). Drones can fly much faster. The Ingenuity mission demonstrated that a drone could travel a horizontal distance of 625 m in a single flight of 166 s at a maximum speed of 5 m/s on Mars [2]. Hence, drones can construct a detailed map of the area and quickly identify the most optimal route to usable resources, using onboard intelligence. Resource locations are transmitted to the nearest rover(s) and spread over the swarm of autonomous vehicles through wireless mesh communication. In addition, the drones may also have the capability to fly to hard-to-reach areas and collect soil samples, in case no rovers are available or when they simply cannot reach the area of interest.
2.3. Satellite Relay
A final case where inter-vehicle cooperation helps is when the distance between robotic explorers prevents direct or mesh communication. In this case, a network of satellites can facilitate communication between distant rovers. In addition, the satellites also serve as relays for communication back to Earth.
Thus, in the envisioned scenario, the key aspect for efficient and effective Mars exploration is the collaboration between the rovers, drones, and satellites. The next sections dive deeper into how this can be facilitated.
3. Energy Management
Space exploration systems deployed millions of kilometers away from Earth need a reliable source of energy to sustain their operation. While electrochemical cells might suffice for powering short-term deployments, long-term missions demand alternative sources of energy to provide periodic energy top-ups to the system. Often, long-term space missions rely on energy generated from sources such as solar or nuclear, in combination with rechargeable electrochemical cells [12,13]. These sources are not always readily available; they are rather limited and unpredictable in many scenarios. Consequently, there is an increasing demand for reliable sources of energy and advanced energy management systems in space missions.
3.1. Conventional Energy Sources
Solar radiation and heat energy generated from the natural decay of radioactive materials have been the predominant energy sources for the majority of Mars rover missions. During the early days of Mars explorations, solar energy was the standard choice due to its well-established technology and ease of implementation. Converting solar energy to electrical energy can be easily accomplished with the help of solar cells. Typically, a combination of solar cells with rechargeable batteries is used. The rechargeable batteries act as a backup source and supply energy to the system when the Sun stops illuminating the panel. For instance, NASA’s Mars Pathfinder used gallium–arsenide solar cells with a maximum production of 180 in combination with 27 , 40 silver–zinc batteries [14]. Similarly, many other solar energy-powered rovers were deployed.
The selection of solar energy for powering Mars rovers was primarily motivated by their widespread use in many space applications and satellites, as well as the technological maturity it has gained over time. However, the Martian environment presented several challenges that restricted the performance of solar panels:
- The intensity of solar radiation decreases with the distance from the Sun to a planet. Consequently, Mars receives weaker illumination from the Sun due to its relatively distant placement in the solar system.
- Relying on solar energy limits choices for the landing location of the rover to those close to the equator, where the radiation is abundantly available [15].
- A major factor that negatively impacts the performance of solar cells is the occurrence of frequent dust storms and dust devils on Mars. These dust storms lead to the accumulation of dust particles over the cells, resulting in the degradation of their performance. The fact that dust particles in the Martian atmosphere are electrostatic further elevates the concern [16]. Over time, the accumulation of dust particles on solar cells has led to the temporary or permanent failure of several missions. Cleaning of dust particles caused by local turbulence has been highly beneficial in mitigating the impact of gradually accumulating dust during certain surface missions reliant on solar power. However, predicting these events has proven to be challenging. In April 2022, NASA’s Ingenuity Helicopter became inactive for around 6 days as the solar arrays stopped functioning due to dust cover [2]. In another instance, China’s first Mars rover Zhurong, surrendered to dust storms [17]. The rover was commanded down to sleep mode in response to an expected dust storm, but it never woke up from its sleep.
In an attempt to overcome the limitations of solar energy sources, Radioisotope Thermal Generators (RTG) were introduced [18]. RTGs are nuclear generators that rely on heat energy released during the radioactive decay of materials to generate electricity. Though RTGs are nuclear power generators, they are direct converters and do not rely on moving or mechanical converters to generate electricity. Specifically, an RTG uses solid-state heat engines, called thermoelectric generators (TEG), to convert heat produced from the natural decay of radioactive materials into electricity. When heat passes through two dissimilar metals that are joined together, a voltage is generated at the junction of these two materials. This phenomenon is known as the Seebeck effect and lays the foundation for TEGs [19].
The use of RTGs has significant benefits. The lack of moving parts to convert heat energy into electrical energy enables a compact, maintenance-free, and noiseless design for RTGs. Moreover, unlike solar cells, they are not impacted by the atmospheric conditions of Mars, such as dust storms. Considering these advantages, many missions to Mars have started using RTGs as energy generators. For example, the Curiosity rover, which has been operational on Mars since August 2012, is sustained by an RTG that guarantees a lifetime of a Martian year (i.e., 687 Earth days) or more [20].
While RTGs address many drawbacks associated with solar power generators, they also have limitations of their own. A significant drawback of the RTG is its low efficiency, cost, and scarcity of radioactive materials. A reduced efficiency exaggerates the amount of heat input and hence the quantity of radioactive material required to produce sufficient electrical energy. Most of the designs so far achieved a beginning-of-life (BOL) efficiency of only 6% [21]. In addition, as the efficiency of a TEG decreases with temperature differences, the RTG will see a decline in its efficiency and power output with time. Although there were proposals for advanced stirling radioisotope generators (ASRG) that claimed to increase efficiency, these proposals were not realized [22].
Finally, there are serious concerns over the influence of RTGs on the local atmospheric environment and consequently, over the meteorological data gathered by the measurement system [23]. Therefore, RTGs must adhere to several regulatory frameworks to ensure system safety, both during the launch and while on Mars [24]. For example, the Moon Treaty does not explicitly prohibit the use of nuclear power sources such as RTGs but emphasizes the need for environmental protection and notification of activities that might harm others or the space environment [25].
3.2. Alternative Energy Sources
At present, Mars exploration missions are relatively limited in terms of the number of rovers deployed and the extent of collaborative swarming activities. Nevertheless, as we progress toward a scenario illustrated in Figure 2, the energy demand is bound to increase. Although solar and RTG power generators are capable of powering autonomous vehicles, their applications are limited due to the drawbacks discussed before. Consequently, a dense and deeply collaborative ecosystem of autonomous vehicles would need to include alternative sources of energy to ensure a long-term operation. To accomplish this, it is necessary to build a multi-source energy harvesting system and employ an efficient power management scheme capable of handling solar, RTG, and other durable energy sources resilient to the challenging conditions on Mars.
Thermal energy generators possess the unique capability of generating energy from temperature differences, making them reliable for energy generation in applications where such differences are available. There are many thermal energy reservoirs identified on Earth that can be potential sources for thermal energy harvesting. Among these, the temperature difference between Earth’s soil and air is considered a viable source of energy that can power many applications [26,27]. Earth’s soil has a high thermal inertia, causing its temperature to lag behind air temperature. This leads to a consistent temperature difference, which can be converted into electrical energy.
When exploring the ground and atmosphere temperature from Mars, a similar phenomenon can be observed [28]. For instance, the data collected by the Curiosity rover show the atmosphere temperature changing from °C to °C, while the surface temperature can go as high as °C and as low as °C [29]. Moreover, soil temperature on Mars lags behind the atmospheric temperature, creating a noticeable temperature difference that can be converted into electrical energy with the help of a TEG. While the energy produced from the soil–atmosphere temperature difference may not be sufficient to perform energy-demanding tasks, many real-time monitoring and surveillance applications may benefit from it.
Although TEGs can convert temperature gradients into energy, they can only work with spatial gradients. Thus, extracting a temperature gradient between the atmosphere and the ground surface requires installing a heat engine with one of its heat reservoirs connected to the atmosphere and the other connected to the soil. This limits the mobility of the energy generators. If this temporal difference could be converted into energy, it could serve as an energy source for autonomous vehicles. A conversion of temporal temperature difference into electrical energy can be accomplished with thermal resonators [30]. Thermal resonators typically employ two thermal masses, for instance, phase change materials (PCMs), to create a thermal circuit tuned to a particular temperature fluctuation frequency, converting temporal gradients into spatial gradients [30]. This spatial gradient can be then converted into energy with the help of any heat engine, or it could even be transformed into mechanical energy to actuate autonomous vehicles [31].
Converting thermal energy to electric energy using TEG is a relatively inefficient process [19]. Consequently, the power generated by thermal generators from ambient heat sources on Mars may not be sufficient to compensate for the solar energy blackout during dust storms. While dust storms reduce the efficiency of solar generators, they themselves can be a potential source of energy. Mars’s environment is abundant in mechanical vibrations produced by frequent winds and dust storms, making this vibrational energy a valuable resource.
However, traditional electromagnetic generators may not be the right choice for Mars due to their heavy weight and large form factor, which results in an increased cost of transportation. Instead, lightweight Triboelectric Nanogenerators (TENG) could be an alternative for converting these mechanical vibrations into electrical energy [32,33]. Unlike mechanical converters, TENGs do not rely on electromagnetic conversion but use electrical charge transfer due to the triboelectric effect. Therefore, TENGs do not require permanent magnets and coils, which contribute significantly to the weight of traditional wind energy generators.
A comparison of energy generators and sources discussed so far is presented in Table 2. It is worth noting that this represents only a subset of energy sources. There are several sources yet to be exploited or discovered. For instance, there have been discussions on the feasibility of geothermal energy [34] as well as sublimation heat engines based on the Leidenfrost effect for generating energy [35]. Sublimation heat engines propose the use of locally available dry ice on Mars’s surface to convert temperature differences into rotational motion. Additionally, systems like thermal wadis, which have already been proposed for Moon missions may also find use in the Martian atmosphere [36].
Although there are many potential sources of energy native to the Martian environment, tapping energy from these sources for powering Mars missions and autonomous vehicles presents numerous challenges. In addition to the inherent inefficiencies associated with the energy converters, the harsh and not yet completely understood Martian environment imposes many restrictions.
Thermoelectric generators (TEGs) are known to be highly inefficient energy converters, particularly at low temperature differences, where their efficiency can even drop below 1%. Furthermore, most of the materials used for building TEGs are not suited for subzero temperatures [37,38], whereas the temperature on Mars can be as low as °C at night. Hence, the choice of material for TEG and its effectiveness becomes a critical question.
Similarly, the thin atmosphere and reduced atmospheric pressure raise questions about the possibilities of wind energy generators. Because of this concern, the possibility of wind energy generation has often been overlooked for Mars applications.
Thus, more research and investigation need to be directed toward sustainable and efficient energy sources and generators for Mars. Nevertheless, it is improbable that a single energy source suffices all the energy demands on Mars. Instead, a combination of multiple energy sources complementing each other will provide a consistent and reliable energy system.
Table 2.
Comparison of conventional and alternative energy sources and generators for Mars exploration.
Table 2.
Comparison of conventional and alternative energy sources and generators for Mars exploration.
| Generator | Benefits | Limitations | SoTA for Mars |
|---|---|---|---|
| Solar Panel | • Inexpensive • Portable • High power conversion efficiency (up to 28%) [12] • Mature technology | • Accumulations of dust cover impacts efficiency • Frequent maintenance required • Decreased radiation intensity—36 to 52% compared to Earth [39] | Used for Mars rovers |
| RTG | • All-weather operation • Minimum or no maintenance required • 6–7% of efficiency [21] | • Uses radioactive materials • Influence on local environment and acquired data • Not suitable for lightweight rovers | Used for Mars rovers |
| Ambient Heat-TEG | • No environmental impact • Least impacted by dust-storms • Least maintenance required | • Low efficiency • Low power density • Portability depends on the choice of heat source | Still in research phase |
| TENG | • No environmental impact • Dust storms are advantageous • Lightweight | • Low efficiency • Impacted by weather conditions • Not a well-established technology | Still in research phase |
3.3. Energy Prediction
Selecting an appropriate source of energy is crucial in extraterrestrial missions. Yet another useful strategy in energy management is adjusting energy expenditure in accordance with energy availability. For instance, in systems powered only by electrochemical batteries, measuring energy availability can be as simple as measuring the battery’s open circuit voltage. This measurement, combined with the certainty that energy does not inherently increase in a battery over time (unless recharged), provides us with the maximum energy available in a system for its future operations. Combining this knowledge with the energy consumed by various tasks of the system can help in formulating an apt strategy for task execution, thus achieving considerate management of the available energy.
However, the complexity in measuring the maximum amount of available energy for future operations of the system increases when the energy in the batteries can be replenished from ambient sources such as solar, thermal, or wind power, due to the uncertainty in the ambient source’s availability. For instance, the uncertainty in solar, thermal, and wind power is introduced by factors such as the relative position and orientation of the system with respect to the energy source, solar activity, seasonal effects, and the weather conditions of the atmosphere containing the system. This uncertainty means that the maximum amount of available energy can change in the future from its present value in a non-linear fashion. Energy harvesting systems draw the required energy from ambient sources. As energy harvesting systems depend on these sources, the success of a task in terms of executing before the deadline with sufficient energy can depend on the accuracy of the estimations of available future energy [40]. Energy harvesting allows systems to be designed with reduced battery sizes or even replace batteries with enduring capacitors (i.e., battery-less systems) for improved sustainability.
Multiple works have been conducted to predict the energy available for energy harvesting systems on Earth [41,42]. These works include statistical models, such as auto-regressive integrated moving average (ARIMA), exponentially weighted moving average (EWMA), weather conditioned moving average (WCMA), profile energy prediction (Pro-Energy), and machine learning (ML) algorithms such as neural networks, Q-learning, and random forests. Depending on when in the future the accumulated energy value needs to be predicted, the prediction horizon can range from seconds to days [42]. A more sophisticated forecasting algorithm is required for accurate prediction when the prediction horizon is distant, as simple models such as ARIMA tend to have prediction errors that are approximately proportional to the prediction horizon.
While the above techniques have been applied in terrestrial environments, similar prediction models can also be applied on Mars, as illustrated in Figure 3. Martian environments have two significant conditions, namely, clear sky and dust stormy sky. However, the limited availability of Martian meteorological data and the extreme weather conditions on the planet make designing such time series forecasting models challenging. Synthetic data generation and online learning forecasting models can be used to alleviate this problem [43]. Nagle-McNaughton et al. describe how such generated data can both enrich existing Martian datasets with additional synthetic samples based on actual observations, as well as augment datasets for which samples are scarce with generated examples that approximate those on Mars [44]. These models can help Martian vehicles anticipate the quantity of available energy and accordingly adjust the current energy expense to maintain the reserve energy. The synthetic dataset can build upon the years of Martian meteorological results collected by the Mars Climate Database [45]. Section 5.2 describes next-generation, low-power AI methods that are suited to the requirements of adapting to the radically changing conditions in extreme environments.
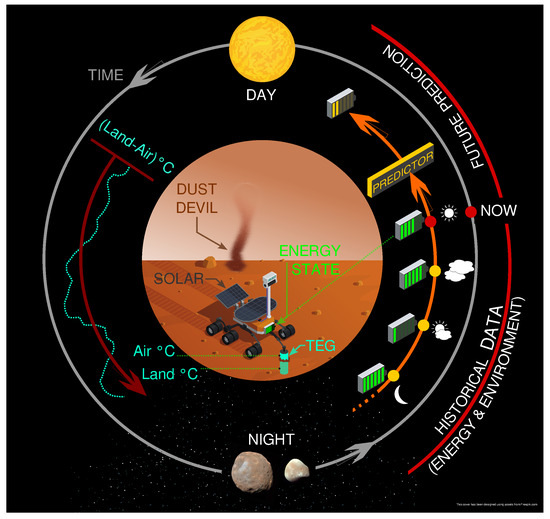
Figure 3.
Based on our study, machine learning algorithms combine historical data of energy harvesting techniques and atmospheric conditions to predict available energy levels from different sources of energy on Mars.
5. Collaborative Energy-Aware Computing
5.1. Energy-Aware Task Scheduling and Distributed Computing
In a scenario where a swarm of autonomous vehicles is deployed on Mars for exploration and colonization, a major challenge arises: Unlike on Earth, there is no readily available power supply distribution network on Mars. In this novel and challenging environment, the robotic workforce must swiftly establish both mobile and fixed charging stations to ensure their survivability [59]. To tackle this challenge, a swarm of intelligent autonomous vehicles can employ cutting-edge AI-based scheduling algorithms to assign tasks while ensuring secure energy availability across the fleet of highly mobile and precisely sensing rovers. For instance, drones equipped with AI capabilities can manage the optimal recharging of other vehicles’ batteries through methods like wireless charging or battery replacement while partaking in the soil sampling tasks.
As described in Section 2, each vehicle possesses a diverse set of capabilities, ranging from resource extraction to scientific exploration. Given the energy-intensive and unpredictable nature of tasks on Mars, along with the limited available resources, an autonomous, energy-aware dynamic task allocation system [60] can be deployed to efficiently manage task scheduling. This system autonomously allocates tasks based on real-time assessments of each vehicle’s capabilities and available energy, ensuring efficient task execution while maintaining a secure energy flow among the ambiently powered vehicles.
The autonomous nature of the task allocation system ensures that once task information is provided, it can perfectly handle the task execution without requiring continuous input from Earth. However, it is important to note that the Earth control system should monitor task accomplishments on a periodic basis, ensuring that the task’s progress is aligned with mission objectives and verifying the successful completion of tasks and update the tasks list. This combination of autonomy and Earth-based monitoring ensures continuous, adaptive operations while accounting for the communication latency and disruptions inherent to Mars missions [61]. This approach involves the real-time assignment of tasks based on available resources, while being demonstrably resilient to robot failures and changes in environmental conditions [59].
The complex task allocation problem falls within the realm of online scheduling—a dynamic process requiring real-time adaptation of tasks to maximize efficiency. In the context of Martian exploration, efficiency refers to the ability to accomplish tasks and missions with minimal resource consumption, particularly in terms of time. The primary efficiency parameters revolve around minimizing the total time required to complete missions and tasks on Mars while adhering to constraints related to the availability of energy resources.
To mitigate the risk of robotic failures, such as those experienced in NASA’s earlier missions, one potential solution is to implement a redundant, low-power energy management module [62] among the collaborative robotic systems. This module would monitor efficient energy harvesting mechanisms, facilitate dead-battery robot recovery, and provide a hard reset capability for the robots. Additionally, incorporating low-power communication protocols, such as Zigbee or Bluetooth Mesh, could enhance coordination and data sharing among robots while minimizing energy consumption.
Mathematically, metaheuristic algorithms are a feasible solution for addressing scheduling problems due to their ability to tackle NP-hard (non-deterministic polynomial-time hard) computational complexities. Despite the absence of a guarantee for globally optimized solutions, metaheuristic models have gained considerable attention in optimization domains [63]. This adoption can be attributed to their adeptness in an equilibrium between temporal efficiency and solution efficacy. This feature makes these methods appealing because they can identify effective solutions, even when the search for the absolute best solution would require an impractical amount of time or computational resources [64]. These advanced algorithms, inspired by natural processes like genetic evolution and particle swarm behavior, optimize the sequence of tasks in time and the distribution of tasks among robots, while considering energy constraints. Furthermore, adaptive AI models, like reinforcement learning (RL), embedded within the swarm’s architecture would allow vehicles to learn and adapt to Mars’ unpredictable energy patterns, making the allocation process more efficient over time by incorporating accurate energy prediction.
When considering the architecture for managing the complex interplay of tasks and energy allocation in UAV swarms, the choice between centralized and decentralized approaches becomes pivotal. In a centralized architecture, a central control unit makes decisions for the entire swarm, whereas in a decentralized system, individual UAVs are empowered with decision-making capabilities, creating a more distributed and adaptive structure. On Mars, the advantages of a decentralized architecture are particularly pronounced due to the lack of immediate communication infrastructure and the vast, unpredictable environment, which make centralized control difficult to implement. This decentralized approach enables UAVs to operate autonomously, adapt to changing conditions, and recover from failures, ensuring continued functionality despite the challenges posed by the Martian environment [65]. A decentralized approach allows each vehicle to autonomously assess its energy levels, prioritize tasks, and collaborate with others when necessary—ensuring adaptability to the unique energy dynamics of Mars. Decentralization also reduces the risk of single points of failure, enhancing the system’s overall robustness and scalability [66]. Furthermore, these intelligent robots, guided by algorithms that continuously learn and evolve, can be deployed in a collaborative human–robot environment, which is known as one of the industry 5.0 principles [67].
5.2. Next-Generation Low-Power AI
The AI paradigm prevalent at the time of this writing is centered on obtaining dramatically impressive results at the expense of grand computational costs and power consumption. Migrating the large-scale computing and power infrastructures required to maintain these data center facilities off-planet would require the establishment of power generation plants or the discovery of sources of high energy on or around Mars. Moreover, frequent communication to terrestrial data centers would be infeasible for real-time missions due to the high data transmission latencies and bandwidth requirements between Mars and Earth. As such, remote, resource-efficient AI algorithms are the only tenable solution for extraterrestrial applications of AI [68]. Applications of such AI algorithms for Mars operations include atmospheric and soil composition analyses, automated detection and decision-making from sensory inputs, pathfinding and exploration, as well as situation- and energy-aware management of resources.
Research on methods for reducing the compute and power requirements of ML algorithms is being spearheaded by numerous organizations, including the prominent TinyML community. Advancements have been made in algorithmic quantization, compression, and automated optimization techniques to reduce the processing, memory, and energy footprints of common ML models to operate on a variety of low-power devices, ranging from embedded processors to microcontrollers.
Quantization decreases model size through a reduction in the precision of values being stored and computed, while compression prunes away unnecessary model elements or determines an alternative, more compact representation. Automated generation and optimization of ML models aims to use ML to create, configure, and tune models to specific application, device, and resource requirements. Each of these methods aims to squeeze ML algorithms into ever-smaller size and energy form factors with minimal loss in model accuracy and precision; however, they are still bound by the restricted performance capabilities of conventional low-power computing elements, and the inefficiencies of traditional computing and programming paradigms applied to on-device ML. A next generation of brain-inspired computing is required.
In modeling the mammalian brain’s signaling through event-based, electrical impulses, spiking neural networks operate under a resource footprint that is a marginal fraction of their artificial NN counterparts. Implemented as recurrently connected liquid state machines (LSMs), such networks can perform very low-power learning while attaining state-of-the-art levels of performance and accuracy without biologically implausible backpropagation [69].
As an alternative method of condensing observations into highly compact representations for AI processing, hyperdimensional computing (HDC) makes use of very long vectors–often ten thousand values or more–as concept embeddings. Such dense, information-rich representations can be transmitted, manipulated, and computed extremely efficiently, resulting in far less processing, memory, and storage requirements to achieve results on par with traditional compute paradigms [70].
These next-generation AI algorithms all still require thousands to millions of observational data examples from Mars to be trained properly. Neuromorphic algorithms, such as SNNs and HDCs, are suitable for rapid, low-power, on-device adaptation to previously unseen circumstances; however, they must still have a baseline training from Martian data. This need for more data was introduced earlier in Section 3.3. Since ground observations from Mars are, at the time of this writing, sparse and very costly to obtain from the few rovers currently making their way across the Red Planet, we propose synthetic data generation techniques, including generative AI, to supplement our present Martian datasets with generated, virtual samples that are based on known examples. The adaptability and generalizability of AI models are only as good as their foundational training data, so it is imperative that we gather and generate more Martian observations. As we facilitate a growing number of future Mars missions, we will hopefully also collect more data for AI training, and a positive feedback loop will be established for the field of autonomous Mars exploration.
5.3. Radiation Hardening
When designing systems for extraterrestrial missions, important considerations include adequate device shielding, radiation effects (cosmic rays and secondary particles), and material impurities, such as radioisotopes in chip packaging [71]. These can cause malfunctions in electronic devices that can be classified into three categories: total ionization dosage, displacement damage dosage, and single-event effects [72]. While hardware optimizations, such as using bipolar integrated circuits and wide band-gap substrates [73], can contribute towards radiation hardening, software optimizations can also be used in cases of single event effects. These can lead to transient faults that can cause soft errors, where a bit in the memory can be flipped from zero to one or vice versa.
While industry-standard methods, such as triple module redundancy (TMR) [74], can be applied to improve the tolerance against soft errors in low-resource overhead tasks, resource consumption becomes enormous when a similar technique is applied for heavy computing tasks, particularly executing AI algorithms. Hence, multiple optimization techniques have been proposed both at the hardware and software levels to improve the fault tolerance of AI algorithms [75]. One such technique for neural networks is called selective multiply-accumulate zero optimization (SMART), where the multiply-accumulate operation associated with a neuron is skipped if the input value is zero [76]. Other techniques such as fault-masking and activation clipping have also been proposed to improve the fault tolerance of AI [75]. These techniques can be used to improve the radiation hardening of various AI tasks executed by the robotic swarms on Mars while remaining energy efficient.
6. The Way Forward
This work describes a futuristic scenario in which a collaborative swarm of autonomous and intelligent vehicles enables sustainable Mars exploration. While it is crucial to identify key challenges, risks, and opportunities at an early stage, the authors are aware that such a scenario on Mars is only feasible after the following steps have been taken.
The first step towards this scenario is to create similar applications for collaborative swarms closer to home, i.e., on Earth or the Moon. This strategy is in line with ESA’s Terra Novae roadmap and NASA’s Moon to Mars strategy. One of the key objectives of the former is the human exploration of the Moon’s surface on long-duration missions by 2030 [77]. This involves building habitation modules of the so-called lunar gateway, which will enable refueling and critical communication functions. Furthermore, ESA will start the design and development of Argonaut, a large lunar lander for the delivery of scientific payloads, rovers, and infrastructure.
As a perspective paper, this work does not propose an immediate implementation plan but instead outlines a structured research roadmap that identifies the key advancements required for sustainable Mars exploration. A phased approach is essential, progressing from theoretical studies and terrestrial technology development to lunar demonstrations and eventual Martian deployment.
The initial phase of research should focus on leveraging advancements in energy-aware autonomous systems, multi-agent coordination, energy-harvesting, and communication protocols, refining these technologies through terrestrial simulations and analog environments that replicate Mars-like conditions. This includes evaluating edge intelligence frameworks, energy-efficient networking, and autonomous navigation algorithms in controlled terrestrial settings before extending them to extraterrestrial applications.
Following terrestrial research, the next stage involves investigating the feasibility of integrating these systems into upcoming lunar exploration missions. The Lunar Gateway, along with ESA’s Argonaut lander and planned surface habitats, presents an opportunity to test communication architectures and resource-aware task scheduling in a relevant space environment. Insights from lunar operations will provide a critical bridge toward adapting these technologies for the Martian context.
Finally, the transition to Mars-focused research will involve theoretical modeling, system-level simulations, and concept validation through precursor missions, enabling incremental adaptation to the unique environmental constraints of the Red Planet. This phase will explore strategies for radiation-hardened autonomy, energy-adaptive decision-making, cooperative robotic exploration, (self-)recovery of vehicles, and recycling of debris, ensuring that the proposed framework aligns with future Mars mission architectures and space sustainability goals. In line, the next step in ESA’s roadmap is the sustainable exploration of the Moon in the subsequent decade, ultimately leading to the first human mission to Mars [78].
Designing Martian applications will involve (1) building a digital twin to simulate Martian conditions for prototyping and verification purposes, and (2) designing testbeds to develop and evaluate the proposed technologies. For example, radiation hardening experiments conducted on Earth can be designed to mimic the radiation on Mars to understand and quantify the impact on the device under test.
Energy management is one of the most crucial aspects to ensure sustainable Mars exploration. The next steps in this field involve selecting more sustainable energy sources and predicting the amount of available energy. The latter can be further improved by collecting data from various locations on the Red Planet to correlate parameters such as temperature difference between soil and atmosphere, solar irradiation at surface level at different angles, wind velocity with seasons, weather, day of the year, etc.
The rapid acceleration of near-Earth satellite and terrestrial autonomous vehicle deployments sets the stage for these technologies to be leveraged for the Moon and Mars. Increasing the onboard ML and sensing capabilities of both satellites and vehicles for terrestrial use directly translates to more effective, efficient, and intelligent systems for Mars exploration, observation, and habitation.
While this concept paper primarily focuses on the technical and engineering aspects of sustainable Mars exploration, it is essential to situate these developments within the broader context of cosmic and Earth-space sustainability. Recent initiatives by organizations such as NASA and the Secure World Foundation have highlighted the importance of ethical, legal, and environmental considerations in space activities. For instance, NASA’s Space Sustainability Strategy outlines a framework for responsible space operations [79], and the Secure World Foundation has published resources addressing challenges in ensuring the security, safety, and sustainability of outer space activities [80]. These discussions encompass topics like planetary protection, space debris mitigation, and the long-term stewardship of extraterrestrial environments. Although a comprehensive analysis of these ethical dimensions is beyond the scope of this paper, we acknowledge their significance and emphasize that future work should integrate these considerations into international regulatory frameworks to ensure responsible and sustainable exploration of Mars.
7. Conclusions
In the quest to extend human presence beyond Earth, Mars has emerged as an appealing destination for exploration and potential colonization. However, the challenges of surviving and thriving on the Red Planet are immense, from its harsh environment to the vast distances that separate it from our home planet.
In contrast to the few standalone explorers on Mars today, we envision a swarm of drones, rovers, and satellites collaborating closely to achieve efficient and effective Mars exploration. Energy management, communication, navigation, observation, and collaborative energy-aware computing were identified as the key ingredients to reach this goal.
The goal of this work is neither to provide a comprehensive literature review on Mars exploration nor to present experimental results. Instead, we aim to provide a forward-thinking and comprehensive vision of sustainable Mars exploration through collaborative intelligent systems that set the foundations for and assist eventual human habitation of the Red Planet.
This work is written from a technological applications engineering perspective. Achieving sustainable Mars exploration requires knowledge and ideas from many other research domains, including material sciences (e.g., sustainability of materials) and robotics (e.g., how to control a swarm of drones on Mars). Hence, further interdisciplinary research is needed, fostering cutting-edge technologies that propel the boundaries of human exploration further into the cosmos.
Author Contributions
Conceptualization, T.J. and R.K.S.; methodology, T.J. and R.K.S.; investigation, all authors; writing—original draft preparation, T.J., R.K.S., P.R., A.J.R., P.P.P., M.M. and M.H.R.; writing—review and editing, T.J., E.M., J.F. and M.W.; visualization, R.K.S. and A.J.R.; supervision, J.F. and M.W.; funding acquisition, R.K.S., P.R. and J.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the MOVIQ project supported by VLAIO and VRI, the LOCUSTS project funded by FWO (Grant G019722N), the OpenSwarm project funded by EU’s Horizon Europe Framework (Grant 101093046) and the EU’s Horizon 2020 Marie Sokolowski-Curie (Grant 813114). Views and opinions expressed are those of the authors only.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
The authors would like to acknowledge the fruitful discussion with ESA on the topic of sustainable Mars exploration.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Petrovsky, A.; Kalinov, I.; Karpyshev, P.; Tsetserukou, D.; Ivanov, A.; Golkar, A. The two-wheeled robotic swarm concept for Mars exploration. Acta Astronaut. 2022, 194, 1–8. [Google Scholar] [CrossRef]
- Tzanetos, T.; Aung, M.; Balaram, J.; Grip, H.F.; Karras, J.T.; Canham, T.K.; Kubiak, G.; Anderson, J.; Merewether, G.; Starch, M.; et al. Ingenuity Mars Helicopter: From Technology Demonstration to Extraterrestrial Scout. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–19. [Google Scholar] [CrossRef]
- Vago, J.L.; Westall, F.; Coates, A.J.; Jaumann, R.; Korablev, O.; Ciarletti, V.; Mitrofanov, I.; Josset, J.L.; De Sanctis, M.C.; Bibring, J.-P.; et al. Habitability on Early Mars and the Search for Biosignatures with the ExoMars Rover. Astrobiology 2017, 17, 471–510. [Google Scholar] [CrossRef]
- ESA. ExoMars Rover. Available online: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_rover (accessed on 8 May 2025).
- NASA. Mars Sample Return. Available online: https://mars.nasa.gov/msr/ (accessed on 8 May 2025).
- Miller, O.G.; Gandhi, V. A survey of modern exogenous fault detection and diagnosis methods for swarm robotics. J. King Saud Univ.-Eng. Sci. 2021, 33, 43–53. [Google Scholar] [CrossRef]
- Khalastchi, E.; Kalech, M. Fault Detection and Diagnosis in Multi-Robot Systems: A Survey. Sensors 2019, 19, 4019. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Zhang, R.; Yu, D.; Dong, G.; Liu, J.; Geng, Y.; Sun, Z.; Yan, W.; Ren, X.; Su, Y.; et al. China’s Mars Exploration Mission and Science Investigation. Space Sci. Rev. 2021, 217, 57. [Google Scholar] [CrossRef]
- Sharma, M.; Gupta, A.; Gupta, S.K.; Alsamhi, S.H.; Shvetsov, A.V. Survey on Unmanned Aerial Vehicle for Mars Exploration: Deployment Use Case. Drones 2022, 6, 4. [Google Scholar] [CrossRef]
- NASA. NASA’s Moon to Mars Strategy and Objectives Development. 2023. Available online: https://www.nasa.gov/sites/default/files/atoms/files/m2m_strategy_and_objectives_development.pdf (accessed on 8 May 2025).
- Liu, J.; Li, H.; Sun, L.; Guo, Z.; Harvey, J.; Tang, Q.; Lu, H.; Jia, M. In-situ resources for infrastructure construction on Mars: A review. Int. J. Transp. Sci. Technol. 2022, 11, 1–16. [Google Scholar] [CrossRef]
- Verduci, R.; Romano, V.; Brunetti, G.; Yaghoobi Nia, N.; Di Carlo, A.; D’Angelo, G.; Ciminelli, C. Solar energy in space applications: Review and technology perspectives. Adv. Energy Mater. 2022, 12, 2200125. [Google Scholar] [CrossRef]
- O’Brien, R.; Ambrosi, R.; Bannister, N.; Howe, S.; Atkinson, H.V. Safe radioisotope thermoelectric generators and heat sources for space applications. J. Nucl. Mater. 2008, 377, 506–521. [Google Scholar] [CrossRef]
- Surampudi, S.; Otzinger, B.; Perrone, D.; Ewell, R.; Burger, D.; Shirbacheh, M.; Bankston, P. Mars Pathfinder Lander battery and solar array performance. In Proceedings of the 36th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 12–15 January 1998; p. 1023. [Google Scholar] [CrossRef]
- Golombek, M.; Grant, J.A.; Parker, T.; Kass, D.; Crisp, J.; Squyres, S.W.; Haldemann, A.; Adler, M.; Lee, W.; Bridges, N.; et al. Selection of the Mars Exploration Rover landing sites. J. Geophys. Res. Planets 2003, 108, 48. [Google Scholar] [CrossRef]
- Jackson, T.; Farrell, W. Electrostatic fields in dust devils: An analog to Mars. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2942–2949. [Google Scholar] [CrossRef]
- Mallapaty, S. What’s happened to China’s first Mars rover? Nature 2023. [Google Scholar] [CrossRef]
- Furlong, R.R.; Wahlquist, E.J. US space missions using radioisotope power systems. Nucl. News 1999, 42, 26–35. Available online: https://www2.ans.org/pubs/magazines/nn/docs/1999-4-2.pdf (accessed on 8 May 2025).
- Jaziri, N.; Boughamoura, A.; Müller, J.; Mezghani, B.; Tounsi, F.; Ismail, M. A comprehensive review of Thermoelectric Generators: Technologies and common applications. Energy Rep. 2020, 6, 264–287. [Google Scholar] [CrossRef]
- NASA. Mars Curiosity Rover. Available online: https://mars.nasa.gov/msl/spacecraft/rover/power/ (accessed on 8 May 2025).
- Liu, Y.; Zhang, Y.; Xiang, Q.; Hao, F.; An, Q.; Chen, H. Comprehensive modeling and parametric analysis of Multi-Mission Radioisotope Thermoelectric Generator. Appl. Therm. Eng. 2023, 219, 119447. [Google Scholar] [CrossRef]
- NASA. Advanced Stirling Radioisotope Generator (ASRG). Available online: https://rps.nasa.gov/resources/65/archival-content-advanced-stirling-radioisotope-generator-asrg/ (accessed on 8 May 2025).
- Lorenz, R.D.; Clarke, E.S. Influence of the Multi-Mission Radioisotope Thermoelectric Generator (MMRTG) on the local atmospheric environment. Planet. Space Sci. 2020, 193, 105075. [Google Scholar] [CrossRef] [PubMed]
- Barco, A.; Ambrosi, R.M.; Williams, H.R.; Stephenson, K. Radioisotope power systems in space missions: Overview of the safety aspects and recommendations for the European safety case. J. Space Saf. Eng. 2020, 7, 137–149. [Google Scholar] [CrossRef]
- United Nations Office for Outer Space Affairs. Moon Agreement. 1979. Available online: https://www.unoosa.org/oosa/en/ourwork/spacelaw/treaties/moon-agreement.html (accessed on 8 May 2025).
- Tian, Y.; Liu, X.; Chen, F.; Zheng, Y. Harvesting energy from sun, outer space, and soil. Sci. Rep. 2020, 10, 20903. [Google Scholar] [CrossRef]
- Snyder, J.; Fleurial, J.P.; Lawrence, E. Thermoelectric Air/Soil Energy-Harvesting Device. NASA Tech Briefs. October 2005. Available online: https://ntrs.nasa.gov/citations/20110016312 (accessed on 8 May 2025).
- Williams, D.R. Mars Fact Sheet. Available online: https://nssdc.gsfc.nasa.gov/planetary/factsheet/marsfact.html (accessed on 8 May 2025).
- NASA/JPL-Caltech/CAB. Taking Mars’ Temperature. Technical Report, NASA. 2012. Available online: https://mars.nasa.gov/resources/4502/taking-mars-temperature/ (accessed on 8 May 2025).
- Cottrill, A.L.; Zhang, G.; Liu, A.T.; Bakytbekov, A.; Silmore, K.S.; Koman, V.B.; Shamim, A.; Strano, M.S. Persistent energy harvesting in the harsh desert environment using a thermal resonance device: Design, testing, and analysis. Appl. Energy 2019, 235, 1514–1523. [Google Scholar] [CrossRef]
- Xiao, C.; Naclerio, N.D.; Hawkes, E.W. Energy Harvesting across Temporal Temperature Gradients using Vaporization. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 7170–7175. [Google Scholar] [CrossRef]
- Seol, M.L.; Han, J.W.; Moon, D.I.; Meyyappan, M. Triboelectric nanogenerator for Mars environment. Nano Energy 2017, 39, 238–244. [Google Scholar] [CrossRef]
- Pozo, B.; Quintana, I.; Ryszawa, E.; Muñoz, I.; Galliard, L.; de Gorostiza, E.F. First Steps to Develop a Triboelectric Wind Turbine for Mars Exploration. In Proceedings of the 46th Aerospace Mechanisms Symposium, Houston, TX, USA, 11–13 May 2022; p. 261. Available online: https://www.esmats.eu/amspapers/pastpapers/pdfs/2022/pozo.pdf (accessed on 8 May 2025).
- Ojha, L.; Buffo, J.; Karunatillake, S.; Siegler, M. Groundwater production from geothermal heating on early Mars and implication for early martian habitability. Sci. Adv. 2020, 6, eabb1669. [Google Scholar] [CrossRef] [PubMed]
- Wells, G.G.; Ledesma-Aguilar, R.; McHale, G.; Sefiane, K. A sublimation heat engine. Nat. Commun. 2015, 6, 6390. [Google Scholar] [CrossRef]
- Gokoglu, S.A.; Sacksteder, K.R.; Pacifi, R.S.W. Analysis of Solar-Heated Thermal Wadis to Support Extended-Duration Lunar Exploration. J. Thermophys. Heat Transf. 2011, 25, 130–139. [Google Scholar] [CrossRef]
- Karthikeyan, M.; Kannan, A.G.; Um, S. Sub-zero temperature thermo-electrochemical energy harvesting system using a self-heating negative temperature coefficient CNT-vanadium oxide cathode. J. Appl. Electrochem. 2017, 47, 125–132. [Google Scholar] [CrossRef]
- Gao, W.; Lei, Z.; Zhang, C.; Liu, X.; Chen, Y. Stretchable and Freeze-Tolerant Organohydrogel Thermocells with Enhanced Thermoelectric Performance Continually Working at Subzero Temperatures. Adv. Funct. Mater. 2021, 31, 2104071. [Google Scholar] [CrossRef]
- Pombo, D.V. A hybrid power system for a permanent colony on Mars. Space Sci. Technol. 2021, 2021. [Google Scholar] [CrossRef]
- Cammarano, A.; Petrioli, C.; Spenza, D. Pro-Energy: A novel energy prediction model for solar and wind energy-harvesting wireless sensor networks. In Proceedings of the 2012 IEEE 9th International Conference on Mobile Ad-Hoc and Sensor Systems (MASS 2012), Las Vegas, NV, USA, 8–11 October 2012; pp. 75–83. [Google Scholar] [CrossRef]
- Ahmed, A.; Khalid, M. A review on the selected applications of forecasting models in renewable power systems. Renew. Sustain. Energy Rev. 2019, 100, 9–21. [Google Scholar] [CrossRef]
- Anuj, J.; Sabovic, A.; Celikkol, B.; Aernouts, M.; Reiter, P.; Mercelis, S.; Hellinckx, P.; Famaey, J. An Energy Management Unit for Predictive Solar Energy Harvesting IoT. In Proceedings of the 8th International Conference on Internet of Things, Big Data and Security (IoTBDS), Prague, Czech Republic, 21–23 April 2023; INSTICC. SciTePress: Setúbal, Portugal, 2023; pp. 39–50. [Google Scholar] [CrossRef]
- Available Solar Energy and Weather Forecasting on Mars Surface. In Mars: Prospective Energy and Material Resources; Badescu, V., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 25–66. [Google Scholar] [CrossRef]
- Nagle-McNaughton, T.P.; Scuderi, L.A.; Erickson, N. Squeezing Data from a Rock: Machine Learning for Martian Science. Geosciences 2022, 12, 248. [Google Scholar] [CrossRef]
- Millour, E.; Forget, F.; Spiga, A.; Pierron, T.; Bierjon, A.; Montabone, L.; Lefèvre, F.; Montmessin, F.; Chaufray, J.; Lopez-Valverde, M.; et al. The Mars Climate Database, MCD version 6. In Proceedings of the Europlanet Science Congress 2024 (EPSC), Berlin, Germany, 8–13 September 2024; Europlanet Society: Kent, UK, 2024; Volume 17, p. 516. [Google Scholar] [CrossRef]
- Hong, X.; Gerla, M.; Wang, H.; Clare, L. Load balanced, energy-aware communications for Mars sensor networks. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 9–16 March 2002; Volume 3, p. 3. [Google Scholar] [CrossRef]
- Ledesma, O.; Lamo, P.; Fraire, J.A.; Ruiz, M.; Sánchez, M.A. Architectural Framework and Feasibility of Internet of Things-Driven Mars Exploration via Satellite Constellations. Electronics 2024, 13, 1289. [Google Scholar] [CrossRef]
- Kan, M. SpaceX Pitches NASA on ‘Marslink’, a Version of Starlink for the Red Planet. 2024. Available online: https://www.pcmag.com/news/spacex-pitches-nasa-on-marslink-a-version-of-starlink-for-the-red-planet (accessed on 8 May 2025).
- Janssen, T.; Koppert, A.; Berkvens, R.; Weyn, M. A Survey on IoT Positioning leveraging LPWAN, GNSS and LEO-PNT. IEEE Internet Things J. 2023, 10, 11135–11159. [Google Scholar] [CrossRef]
- Van Uytsel, W.; Janssen, T.; Halili, R.; Weyn, M. Exploring Positioning Through Pseudoranges Using Low Earth Orbit Satellites. In Advances on P2P, Parallel, Grid, Cloud and Internet Computing; Barolli, L., Ed.; Springer: Berlin/Heidelberg, Germany, 2023; Volume 13, pp. 278–287. [Google Scholar] [CrossRef]
- Kassas, Z.M.; Kozhaya, S.; Kanj, H.; Saroufim, J.; Hayek, S.W.; Neinavaie, M.; Khairallah, N.; Khalife, J. Navigation with Multi-Constellation LEO Satellite Signals of Opportunity: Starlink, OneWeb, Orbcomm, and Iridium. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 338–343. [Google Scholar] [CrossRef]
- Hayward, L. Advanced Navigation Awarded $5.2 M in Funding from Australian Space Agency for Future Lunar Exploration. 2023. Available online: https://www.advancednavigation.com/news/advanced-navigation-awarded-5-2m-in-funding-from-australian-space-agency-for-future-lunar-exploration/ (accessed on 8 May 2025).
- ESA. Artificial Intelligence in Space; Technical Report; ESA: Paris, France, 2023; Available online: https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/Artificial_intelligence_in_space (accessed on 8 May 2025).
- NASA Jet Propulsion Laboratory. Projects-CASPER. Available online: https://ai.jpl.nasa.gov/public/projects/casper/ (accessed on 8 May 2025).
- Balemans, D.; Reiter, P.; Steckel, J.; Hellinckx, P. Resource efficient AI: Exploring neural network pruning for task specialization. Internet Things 2022, 20, 100599. [Google Scholar] [CrossRef]
- Cassimon, T.; Vanneste, S.; Bosmans, S.; Mercelis, S.; Hellinckx, P. Designing resource-constrained neural networks using neural architecture search targeting embedded devices. Internet Things 2020, 12, 100234. [Google Scholar] [CrossRef]
- Lahaye, W. First Space ICON Project ‘MOVIQ’ Has Officially Started! 2023. Available online: https://flandersspace.be/en/moviq/ (accessed on 8 May 2025).
- Balemans, N.; Hellinckx, P.; Latré, S.; Reiter, P.; Steckel, J. S2L-SLAM: Sensor Fusion Driven SLAM using Sonar, LiDAR and Deep Neural Networks. In Proceedings of the 2021 IEEE Sensors, Virtual, 31 October–4 November 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Notomista, G.; Mayya, S.; Emam, Y.; Kroninger, C.; Bohannon, A.; Hutchinson, S.; Egerstedt, M. A Resilient and Energy-Aware Task Allocation Framework for Heterogeneous Multirobot Systems. IEEE Trans. Robot. 2022, 38, 159–179. [Google Scholar] [CrossRef]
- Mokhtari, M.; Mohamadi, P.H.A.; Aernouts, M.; Singh, R.K.; Vanderborght, B.; Weyn, M.; Famaey, J. Energy-aware multi-robot task scheduling using meta-heuristic optimization methods for ambiently-powered robot swarms. Robot. Auton. Syst. 2025, 186, 104898. [Google Scholar] [CrossRef]
- Chappell, M.B.; po Chai, P.R.; Rucker, M.A. Mars Communications Disruption and Delay; White Paper; NASA Headquarters: Washington, DC, USA, 2024. Available online: https://ntrs.nasa.gov/citations/20230012950 (accessed on 8 May 2025).
- Mokhtari, M.; Ali Mohamadi, P.H.; Subotic, D.; Singh, R.K.; Vanderborght, B.; Weyn, M.; Famaey, J. Low-power Energy Management Module for Ambiently Powered Robotic Swarms. In Proceedings of the 2024 IEEE 21st International Conference on Smart Communities: Improving Quality of Life using AI, Robotics and IoT (HONET), Doha, Qatar, 3–5 December 2024; pp. 209–216. [Google Scholar] [CrossRef]
- Safaeian, M.; Khayamim, R.; Ozguven, E.E.; Dulebenets, M.A. Sustainable decisions in a ridesharing system with a tri-objective optimization approach. Transp. Res. Part D Transp. Environ. 2023, 125, 103958. [Google Scholar] [CrossRef]
- Antonyshyn, L.; Silveira, J.; Givigi, S.; Marshall, J. Multiple Mobile Robot Task and Motion Planning: A Survey. ACM Comput. Surv. 2023, 55, 213:1–213:35. [Google Scholar] [CrossRef]
- Jamshidpey, A.; Wahby, M.; Heinrich, M.; Allwright, M.; W., Z.; Dorigo, M. Centralization vs. Decentralization in Multi-Robot Coverage: Ground Robots Under UAV Supervision; Technical Report 8; IRIDIA, Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle, Universite Libre de Bruxelles: Brussels, Belgium, 2021; Available online: https://arxiv.org/abs/2408.06553 (accessed on 8 May 2025).
- Khaliq, S.; Ahsan, S.; Nisar, M.D. Multi-Platform Hardware In The Loop (HIL) Simulation for Decentralized Swarm Communication Using ROS and GAZEBO. In Proceedings of the 2021 IEEE 22nd International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Pisa, Italy, 7–11 June 2021; pp. 310–315. [Google Scholar] [CrossRef]
- Calzavara, M.; Faccio, M.; Granata, I. Multi-objective task allocation for collaborative robot systems with an Industry 5.0 human-centered perspective. Int. J. Adv. Manuf. Technol. 2023, 128, 297–314. [Google Scholar] [CrossRef]
- Surianarayanan, C.; Lawrence, J.J.; Chelliah, P.R.; Prakash, E.; Hewage, C. A Survey on Optimization Techniques for Edge Artificial Intelligence (AI). Sensors 2023, 23, 1279. [Google Scholar] [CrossRef]
- Deckers, L.; Tsang, I.J.; Van Leekwijck, W.; Latré, S. Extended liquid state machines for speech recognition. Front. Neurosci. 2022, 16, 1023470. [Google Scholar] [CrossRef]
- Smets, L.; Van Leekwijck, W.; Tsang, I.J.; Latre, S. Training a HyperDimensional Computing Classifier using a Threshold on its Confidence. Neural Comput. 2023, 35, 2006–2023. [Google Scholar] [CrossRef]
- JEDEC. Measurement and Reporting of Alpha Particle and Terrestrial Cosmic Ray-Induced Soft Errors in Semiconductor Devices. 2021. Available online: https://www.jedec.org/standards-documents/docs/jesd-89a (accessed on 8 May 2025).
- Luza, L.M.; Wrobel, F.; Entrena, L.; Dilillo, L. Impact of Atmospheric and Space Radiation on Sensitive Electronic Devices. In Proceedings of the 2022 IEEE European Test Symposium (ETS), Barcelona, Spain, 23–27 May 2022; pp. 1–10. [Google Scholar] [CrossRef]
- Yu, F.X.; Liu, J.R.; Huang, Z.L.; Luo, H.; Lu, Z.M. Overview of Radiation Hardening Techniques for IC Design. Inf. Technol. J. 2010, 9, 1068–1080. [Google Scholar] [CrossRef][Green Version]
- Wakerly, J. Microcomputer reliability improvement using triple-modular redundancy. Proc. IEEE 1976, 64, 889–895. [Google Scholar] [CrossRef]
- Su, F.; Liu, C.; Stratigopoulos, H.G. Testability and Dependability of AI Hardware: Survey, Trends, Challenges, and Perspectives. IEEE Des. Test 2023, 40, 8–58. [Google Scholar] [CrossRef]
- Rajappa, A.J.; Reiter, P.; Sartori, T.K.S.; Laurini, L.H.; Fourati, H.; Mercelis, S.; Famaey, J.; Bastos, R.P. SMART: Selective MAC zero-optimization for neural network reliability under radiation. Microelectron. Reliab. 2023, 150, 115092. [Google Scholar] [CrossRef]
- ESA. Terrae Novae 2030 + Strategy Roadmap; Technical Report; ESA: Paris, France, 2022; Available online: https://bsgn.esa.int/business-in-space/business-in-space-growth-network/terrae-novae/ (accessed on 8 May 2025).
- ESA. Explore 2040: The European Exploration Strategy; Technical Report; ESA: Paris, France, 2024; Available online: https://esamultimedia.esa.int/docs/HRE/Explore_2040.pdf (accessed on 8 May 2025).
- Samson, V.; Secure World Foundation. Space Sustainability: An Overview. 2024. Available online: https://swfound.org/media/207899/vsamson_space-sustainability_-lsas-july-10-2024.pdf (accessed on 8 May 2025).
- NASA. NASA’s Space Sustainability Strategy; Technical Report; NASA: Greenbelt, MD, USA, 2024. Available online: https://www.nasa.gov/wp-content/uploads/2024/04/nasa-space-sustainability-strategy-march-20-2024-tagged3.pdf (accessed on 8 May 2025).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).