
Research on Surrogate Model of Variable Geometry Turbine Performance Based on Backpropagation Neural Network

Abstract
1. Introduction
- A quasi-2D turbine performance prediction method was combined with a flow loss model and a deviation angle model. A variable geometry model and a cooling model were introduced to develop a variable geometry turbine performance prediction method considering cooling air mixing.
- A surrogate model for variable geometry turbine performance considering the effects of cooling air mixing was established using a BP neural network, realizing rapid prediction of multi-stage variable geometry turbine cooling performance.
2. Methods and Models
2.1. Quasi-2D Method
- (1)
- The gas flow is a perfect gas with constant specific heat, and the flow is steady and adiabatic.
- (2)
- There is no gas flow migration between the streamtube, which is divided at equal heights in the radial direction along the turbine passage.
- (3)
- In each streamtube, the gas aerodynamic parameters at the mean radius are taken as the average value of its gas aerodynamic parameters.
- (4)
- In each streamtube, the total temperature, total pressure, and axial velocity of the gas flow remain constant in the radial direction, while the static temperature, static pressure, and tangential velocity of the gas flow change in the form of free vortexes in the radial direction.
- (5)
- In each streamtube, the mass flow rate per unit area is determined by the aerodynamic parameters at its mean radius and remains constant with the radial position.
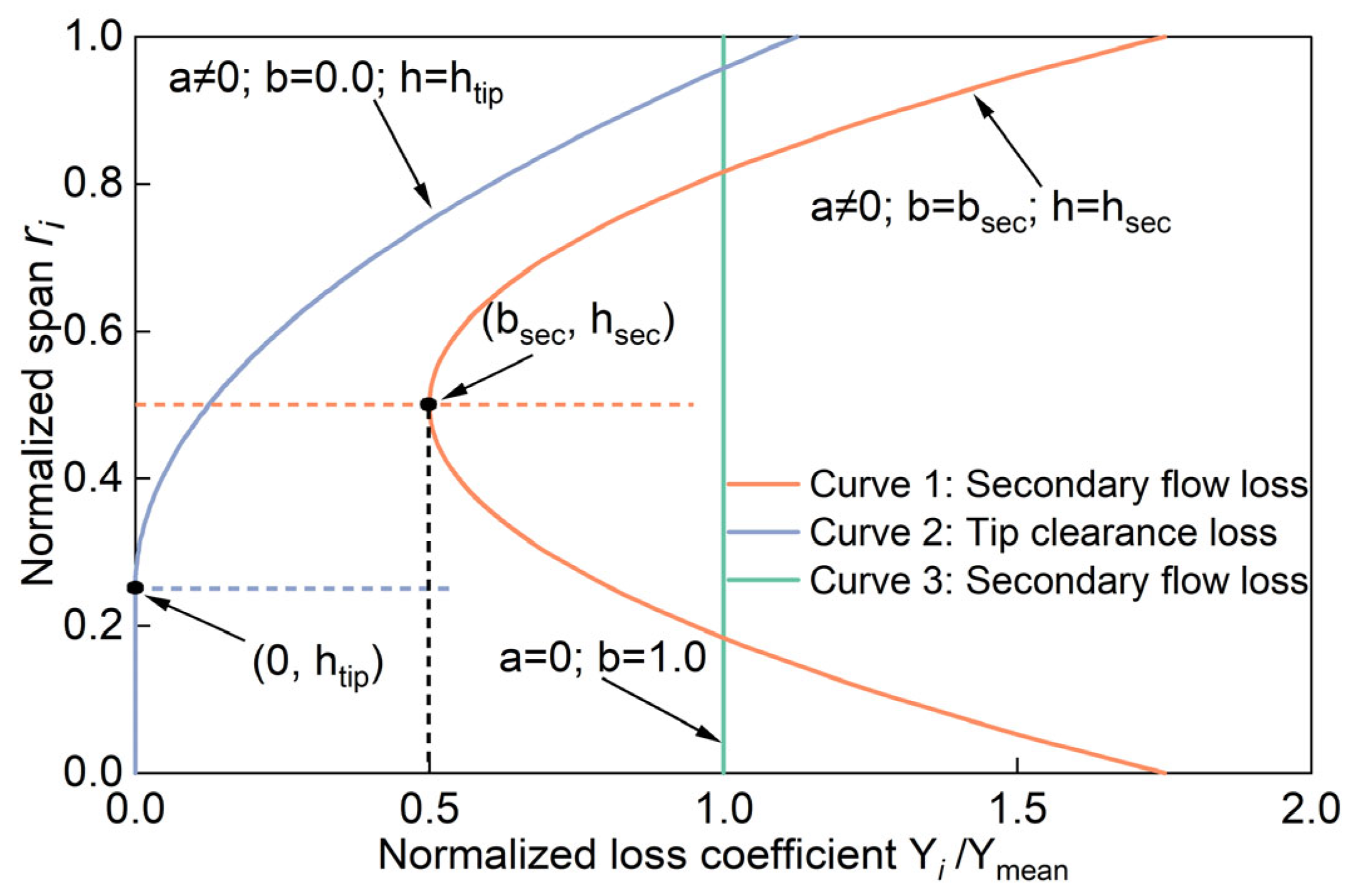
2.2. The Loss Distribution
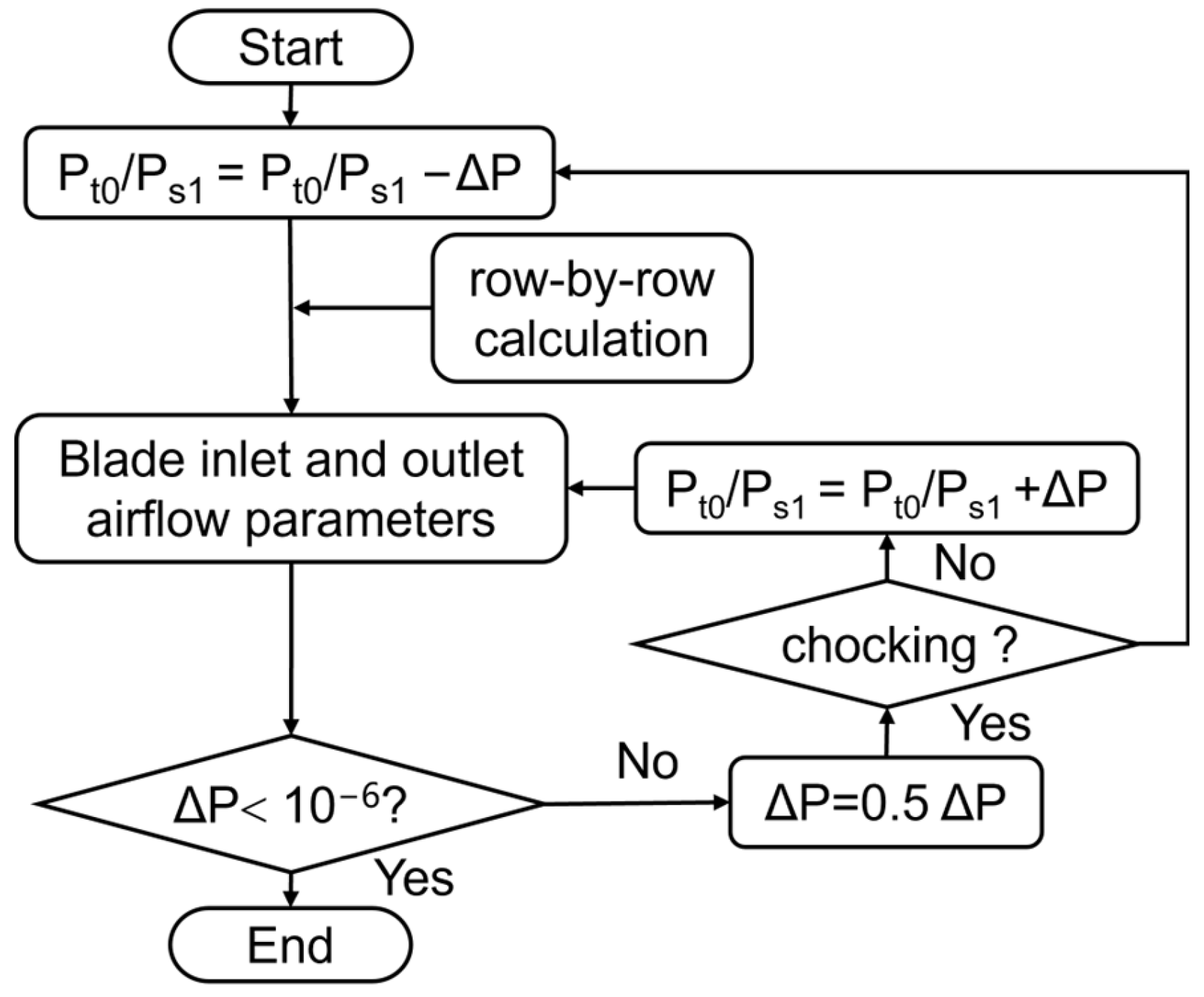
2.3. Determination of Turbine Choking Condition
2.4. Variable Geometry Turbine Considering Cooling Air Mixing
2.5. BP Neural Network Model
2.5.1. Acquisition and Pre-Processing of Performance Data
2.5.2. BP Neural Network Structure
2.5.3. Model Evaluation Indicators
3. Results and Analysis
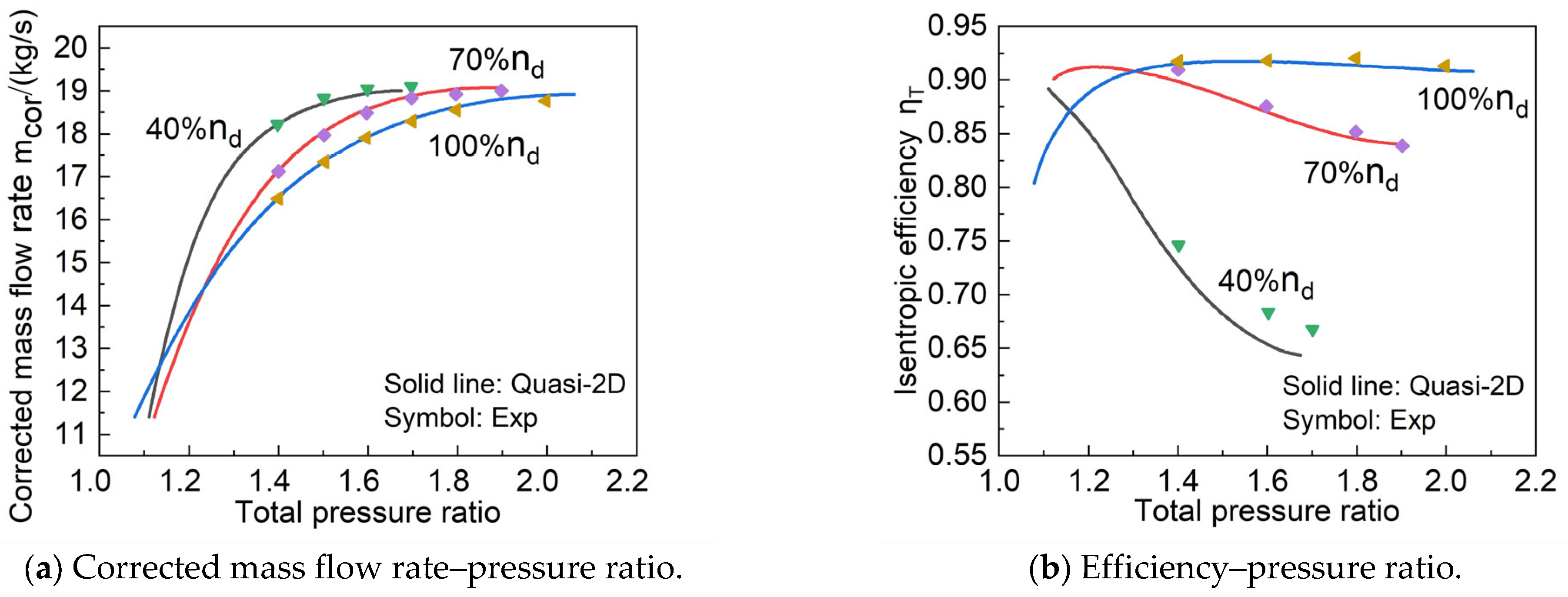
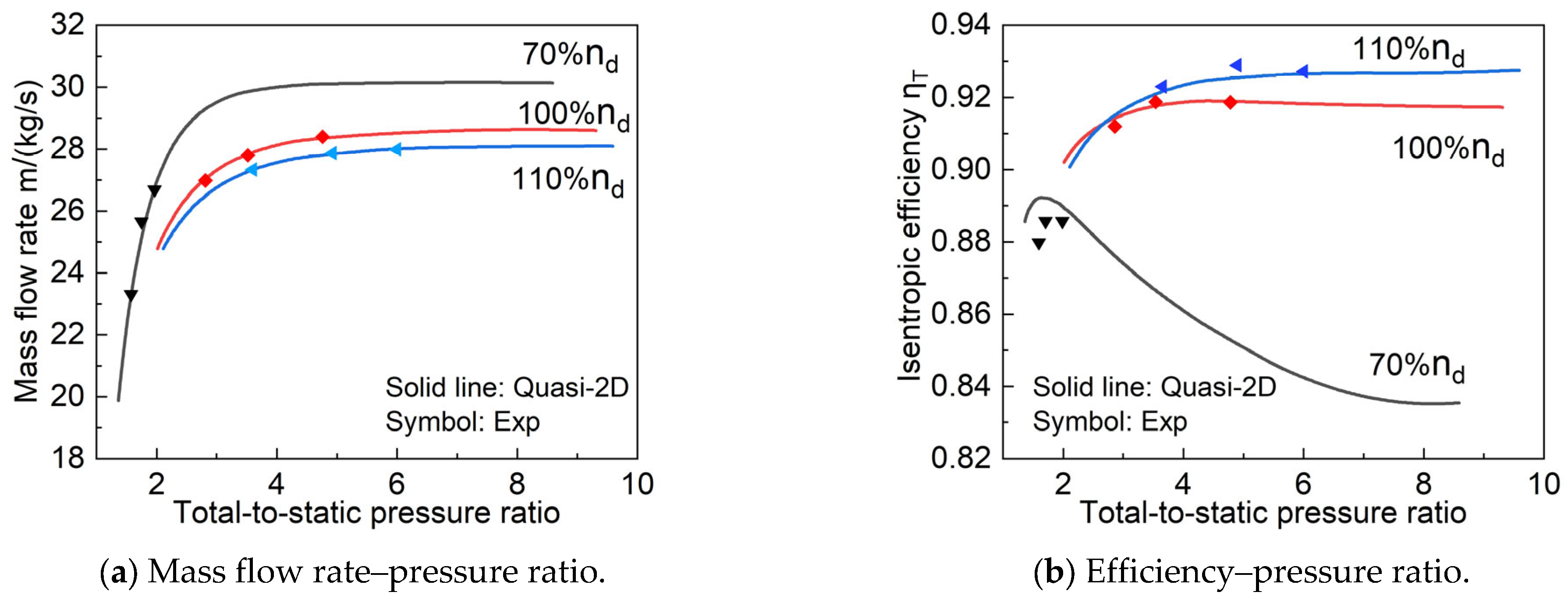
3.1. Validation of the Fixed Geometry Turbine
3.2. Sensitivity Analysis of Single-Stage Turbine
3.3. Variable Geometry Turbine Performance Analysis
3.3.1. The Single-Stage Variable Geometry Turbine
3.3.2. Five-Stage Variable Geometry Turbine
3.4. BP Neural Network Model Prediction Results and Analysis
3.4.1. Surrogate Model of Single-Stage Turbine Variable Geometry Cooling Performance
3.4.2. Surrogate Model of Five-Stage Turbine Variable Geometry Cooling Performance
4. Conclusions
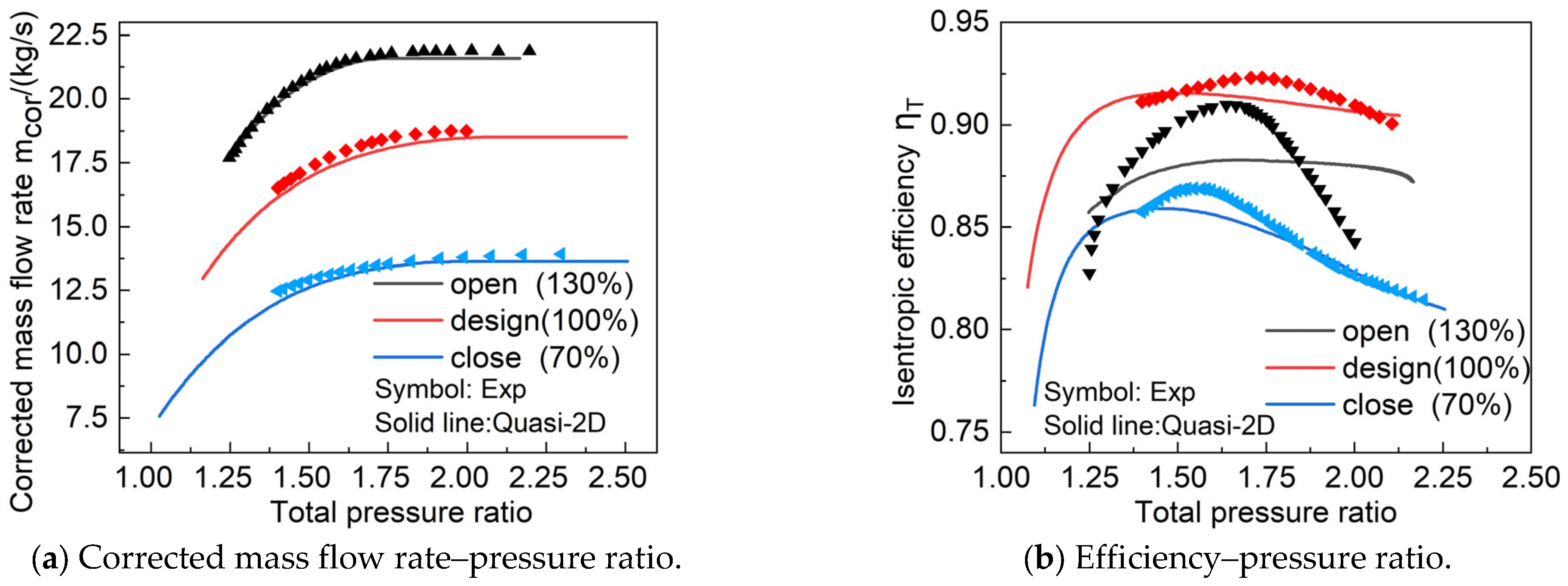
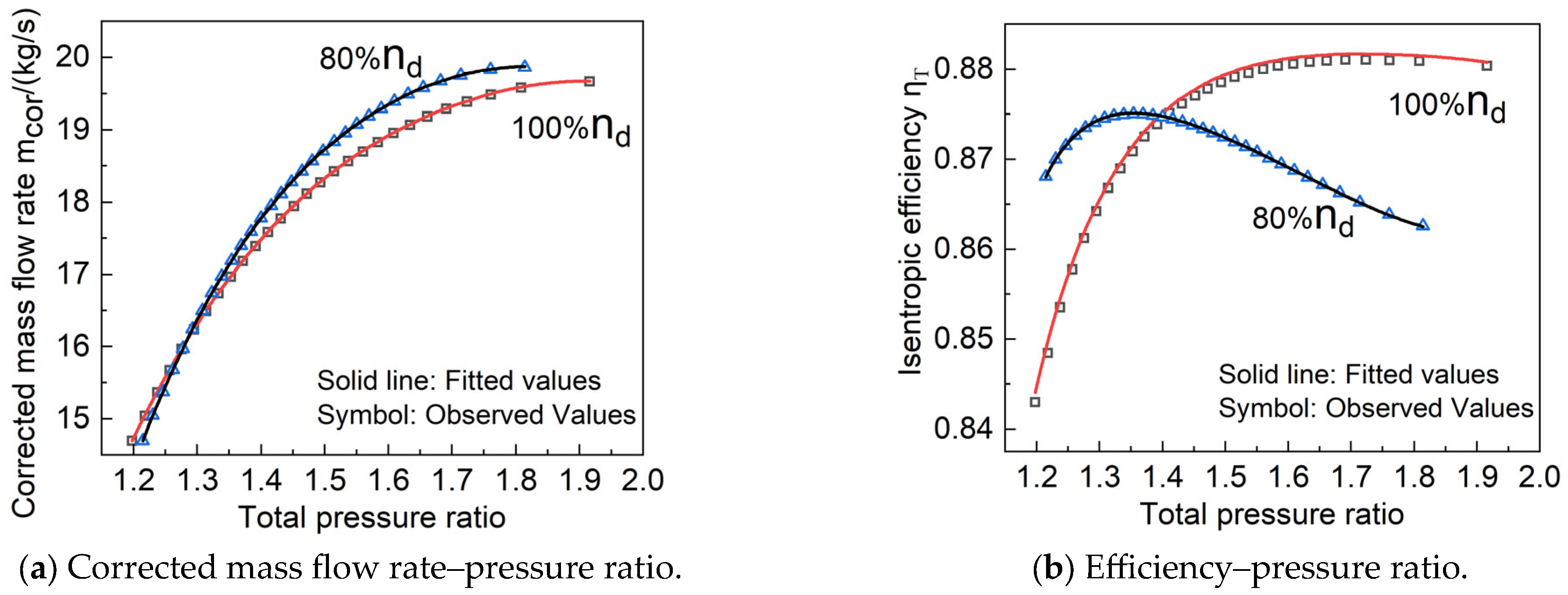
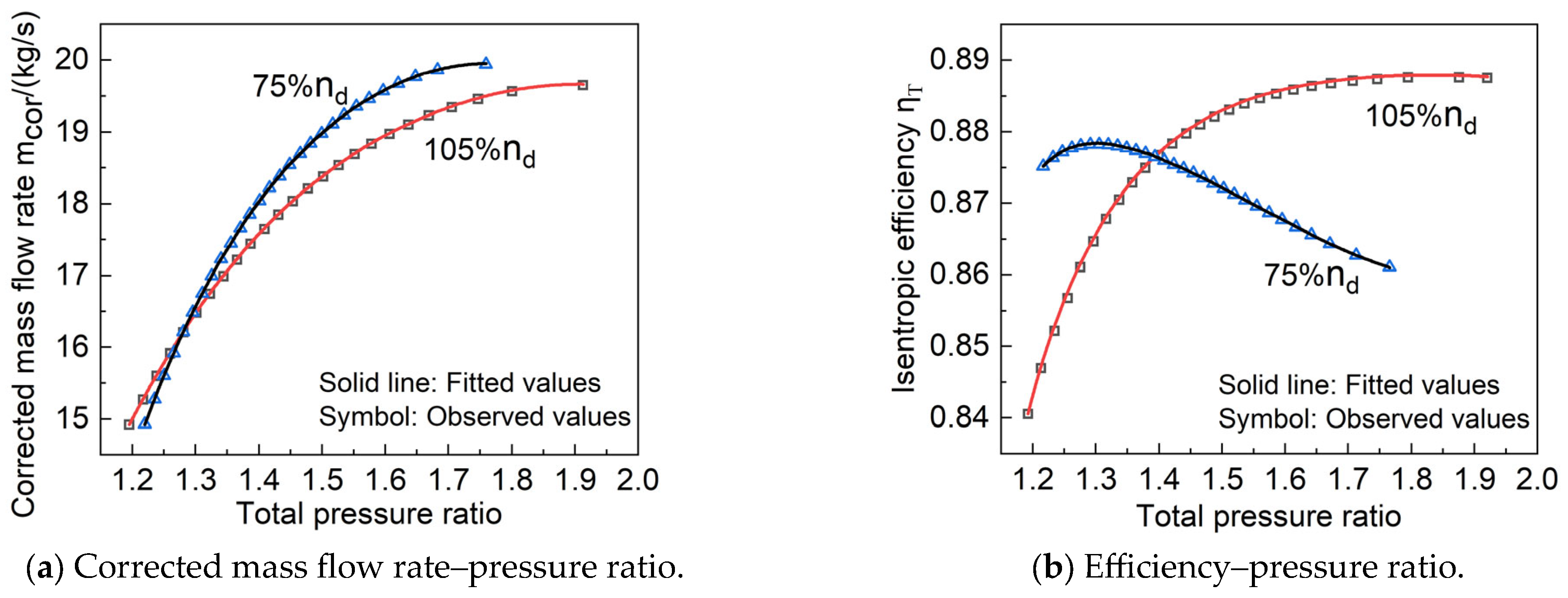
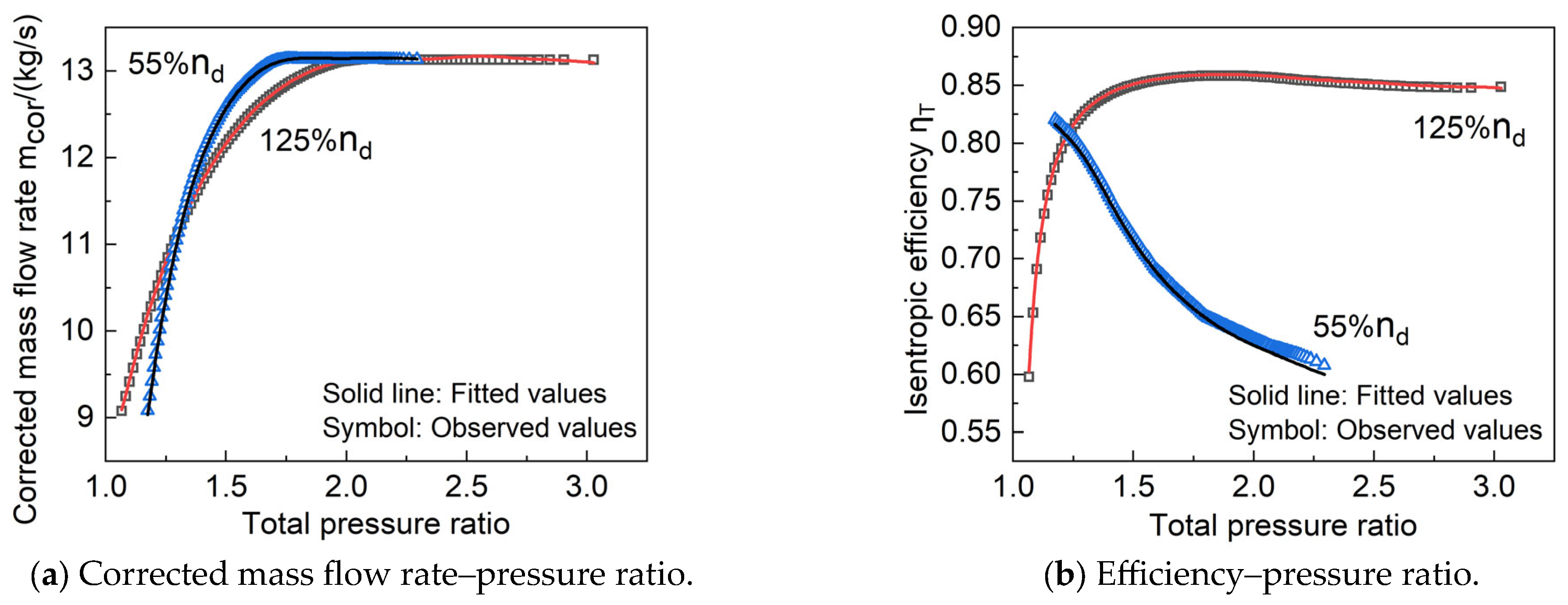
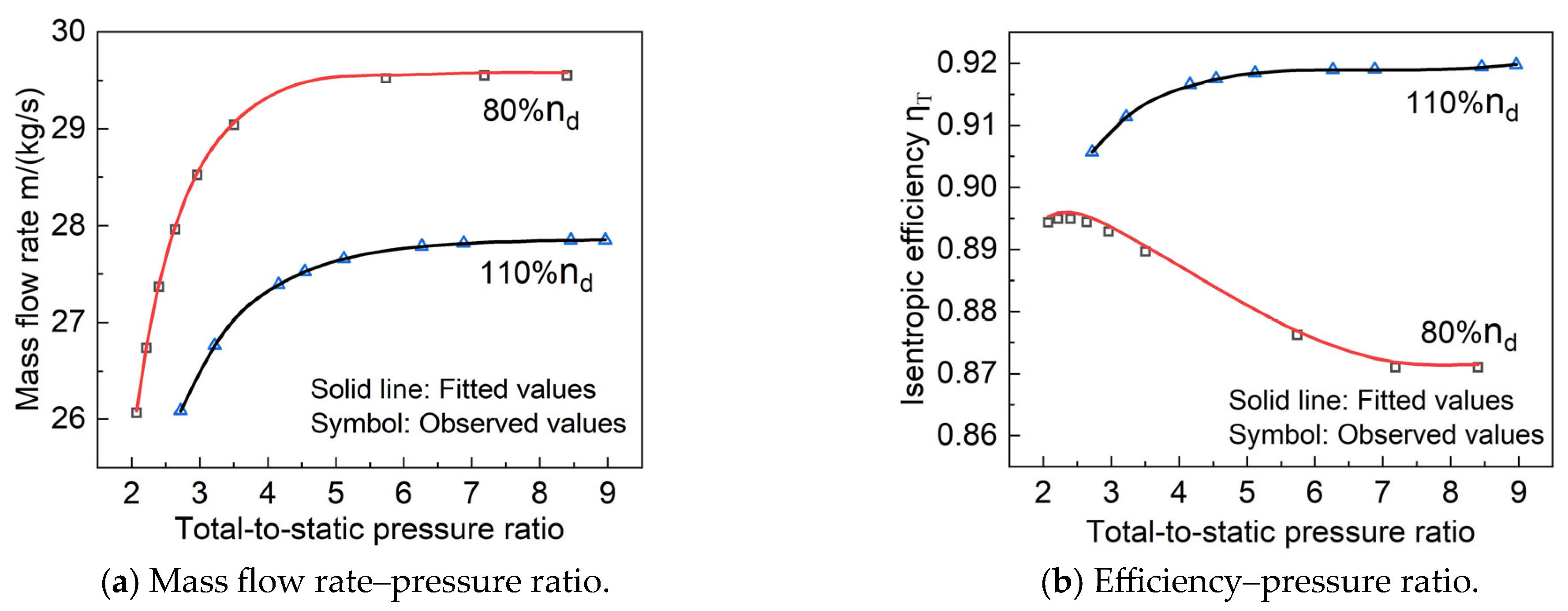
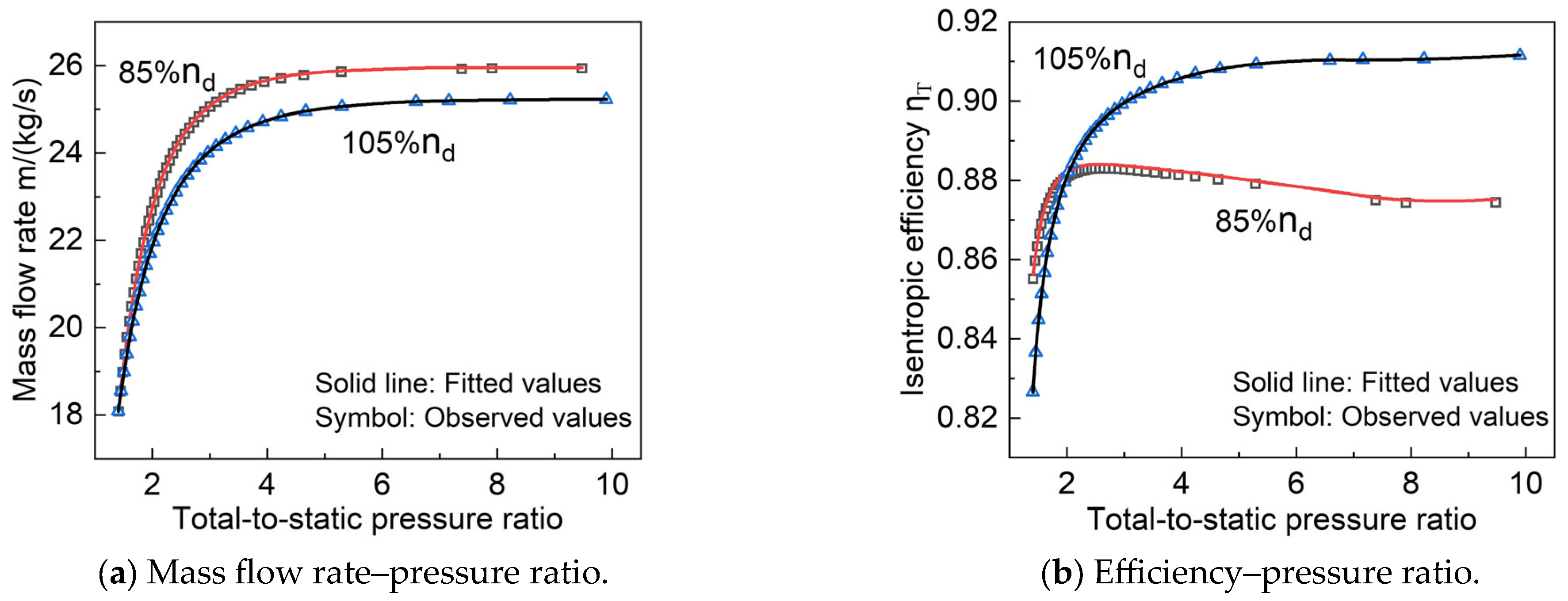
- A quasi-2D performance prediction method for axial flow turbines was developed using a simple radial equilibrium equation to consider variation in aerodynamic parameters along the spanwise direction. At 40%, 70%, and 100% design speeds, the maximum relative errors of the single-stage turbine corrected mass flow rate and efficiency were 0.7% and 4.44%, respectively. At 70%, 100%, and 110% design speeds, the maximum relative errors of the five-stage turbine mass flow rate and efficiency did not exceed 1.67% or 1.385%, respectively. This shows that the method reliably and accurately predicts turbine performance.
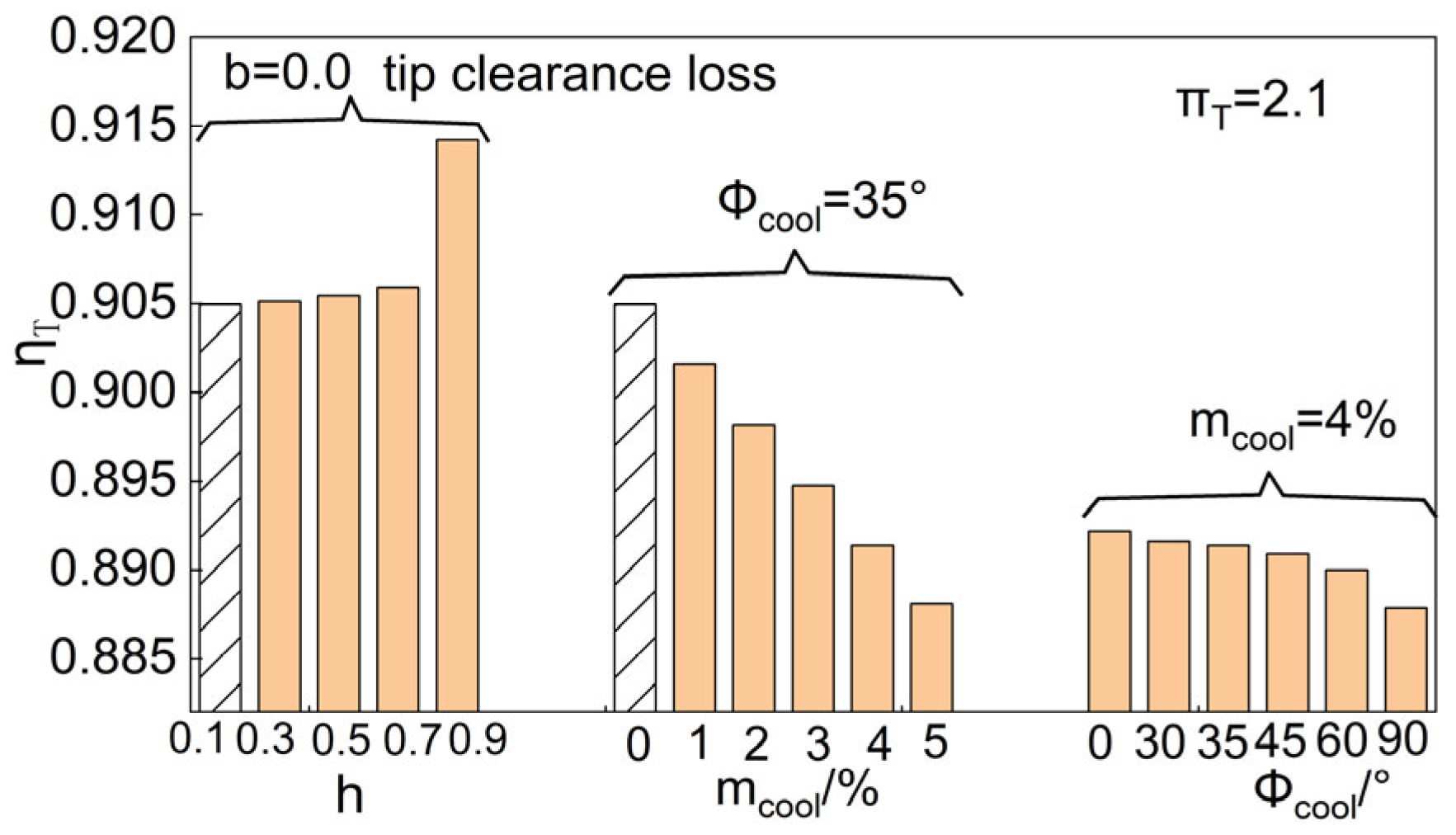
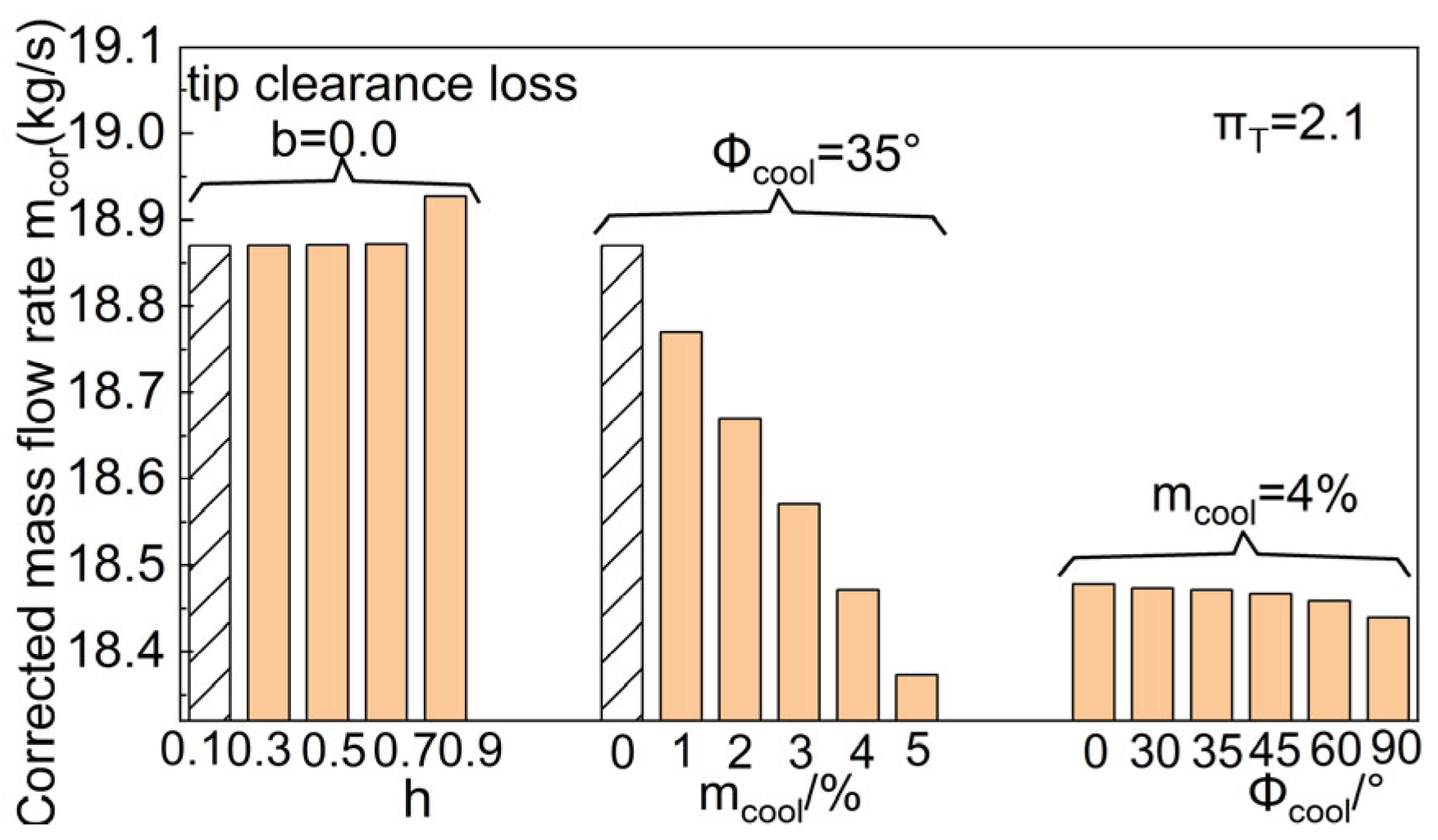
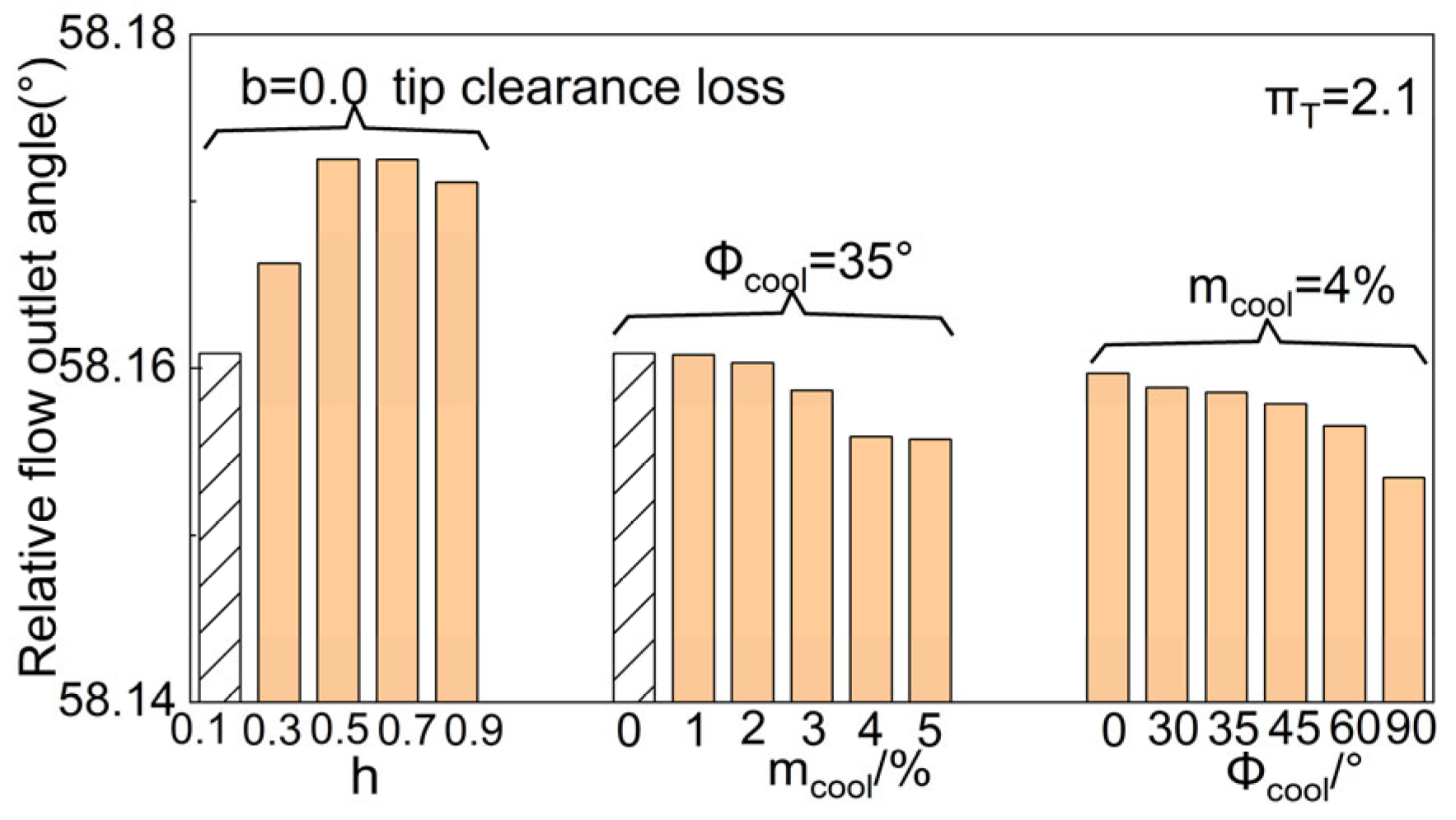
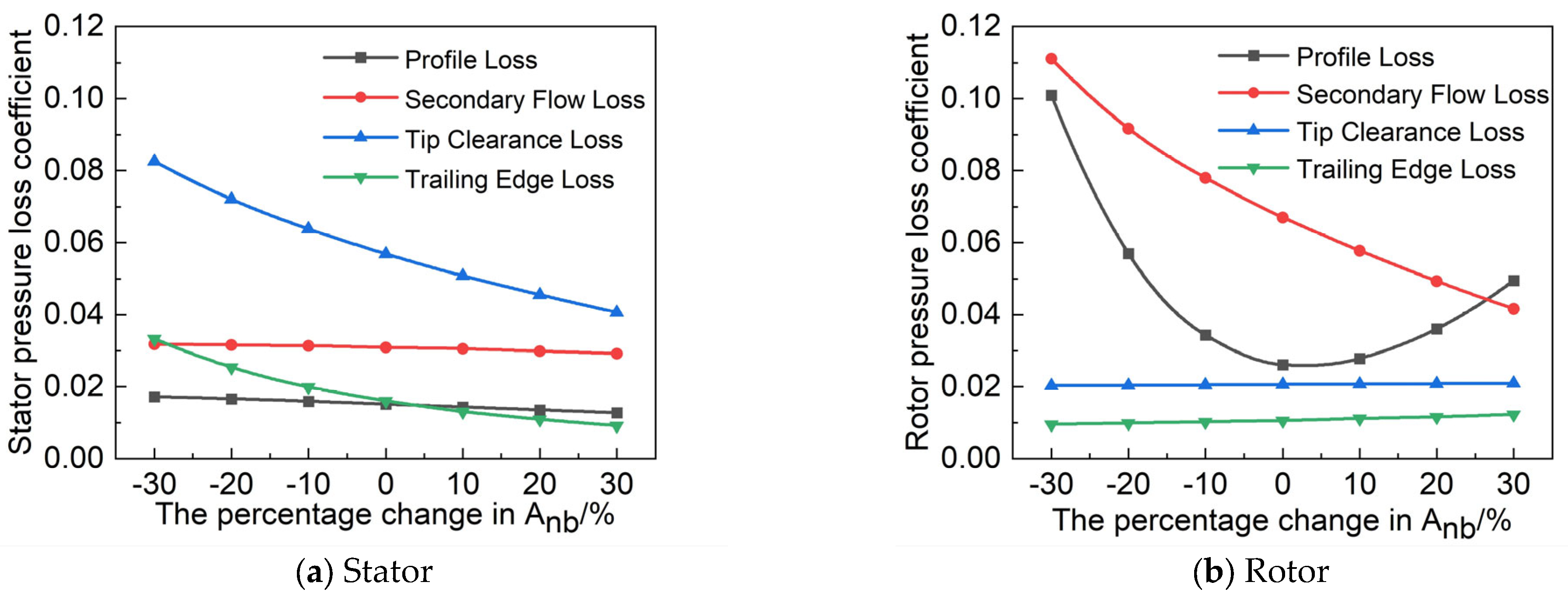
- A sensitivity analysis of the single-stage turbine was conducted. When conducting research based on the quasi-2D method and adopting the K-O loss model, the radial distribution patterns of secondary flow loss and tip clearance loss had low sensitivity to efficiency and the mass flow rate. It is reasonable to use the parabolic distribution pattern for the radial distribution of secondary flow loss and tip clearance loss.
- The quasi-2D axial flow turbine variable geometry performance prediction method was further developed. The maximum relative errors of the single-stage turbine corrected mass flow rate under 130%, 100%, and 70% design areas were 1.362%, 2.242%, and 3.602%, respectively, and the maximum relative errors of turbine efficiency were 4.228%, 1.139%, and 1.253%, respectively. This indicates that the variable geometry turbine performance prediction method developed in this study is highly accurate.
- Both opening and closing Anb will cause a decrease in turbine efficiency and closing Anb causes a greater decrease in turbine efficiency. The change in mass flow rate is smaller than the change in Anb. When the pressure ratio is 1.75, the Anb of the single-stage turbine is closed by 30%, the efficiency decreases by 6.932%, and the mcor decreases by 25.67%; when Anb is opened up by 30%, the turbine efficiency decreases by 3.148% and mcor decreases by 19.48%. When the design total-to-static pressure ratio is 4.76, the Anb of the five-stage turbine is opened up by 20%, the turbine efficiency decreases by 0.116% and the m increases by 4.62%; when Anb is closed by 20%, the turbine efficiency decreases by 1.653% and m decreases by 10.10%.
- A surrogate model of variable geometry turbine performance considering the effect of cooling air was constructed based on a BP neural network. The BP neural network models established for the single-stage and five-stage turbines had R2 values greater than 0.999 for the training samples. The MAPE predicted for the known performance data did not exceed 0.04%; the MAPE predicted for the performance data within the sample space range did not exceed 0.04%; and the MAPE predicted for the performance data outside the sample space range did not exceed 0.43%. This indicates that the surrogate model established in this study has high prediction accuracy and strong generalization ability.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Notations | Abbreviations | ||
| VGT | variable geometry turbine | ||
| γ | stagger angle [°] | VAN | variable area nozzle |
| inlet metal angle [°] | quasi-2D | quasi-two-dimensional | |
| outlet metal angle [°] | R2 | coefficient of determination | |
| throat width cm (inches) | RMSE | root mean square error | |
| m | mass flow rate [kg/s] | MAE | mean absolute error |
| mcor | corrected mass flow rate [kg/s] | MAPE | mean absolute percentage error |
| mcool | cooling air [kg/s] | 1D | one-dimensional |
| n | rotational speed (rpm) | Subscripts | |
| P | pressure | d | design point |
| expansion ratio | cor | corrected | |
| η | efficiency | T | turbine |
| turbine guide throat area [%] | pre | predicted value | |
| variation in stagger angle [°] | t | total parameter | |
| cooling air angle [°] | s | static parameter |
References
- Behning, F.P.; Moffitt, T.P.; Schum, H.J. Effect of Variable Stator Area on Performance of a Single-Stage Turbine Suitable for Air Cooling. 3—Turbine Performance with 130-Percent Design Stator Area; NASA Report No. NASA-TM-X-1663; Lewis Research Center: Cleveland, OH, USA, 1968. [Google Scholar]
- Prust, H.W.; Schum, H.J.; Szanca, E.M. Effect of Variable Stator Area on Performance of a Single-Stage Turbine Suitable for Air Cooling. 6—Turbine Performance with 70-Percent Design Stator Area; NASA Report No. NASA-TM-X-1697; Lewis Research Center: Cleveland, OH, USA, 1968. [Google Scholar]
- Moffitt, T.; Schum, H. Performance of a single-stage turbine as affected by variable statorarea. In Proceedings of the 5th Propulsion Joint Specialist, Colorado Springs, CO, USA, 9–13 June 1969. [Google Scholar] [CrossRef]
- Behning, F.P.; Schum, H.J.; Szanca, E.M. Cold-Air Investigation of a Turbine for High Temperature-Engine Application. 5: Two-Stage Turbine Performance as Affected by Variable Stator Area; NASA Report No. NASA-TN-D-4389; Lewis Research Center: Cleveland, OH, USA, 1974. [Google Scholar]
- Kozak, D.; Mazuro, P.; Teodorczyk, A. Numerical Simulation of Two-Stage Variable Geometry Turbine. Energies 2021, 14, 5349. [Google Scholar] [CrossRef]
- Galindo, J.; Tiseira, A.; Fajardo, P.; García-Cuevas, L.M. Development and validation of a radial variable geometry turbine model for transient pulsating flow applications. Energy Convers. Manag. 2014, 85, 190–203. [Google Scholar] [CrossRef]
- Razinsky, E.H.; Kuziak, W.R., Jr. Aerothermodynamic Performance of a Variable Nozzle Power Turbine Stage for an Automotive Gas Turbine. J. Eng. Power 1977, 99, 587–592. [Google Scholar] [CrossRef]
- Yao, Y.; Tao, Z.; Zhou, K.; Yang, Y.; Song, L.; Li, J.; Feng, Z. Aerodynamic performance measurement of a novel variable geometry turbine adjustable guide vane scheme by experimental study. Aerosp. Sci. Technol. 2023, 140, 108413. [Google Scholar] [CrossRef]
- Yue, G.; Lin, H.; Jiang, Y.; Zheng, Q.; Dong, P. Effect of Tip Configurations on Aerodynamic Performance of Variable Geometry Linear Turbine Cascade. Int. J. Turbo Jet-Engines 2019, 36, 457–470. [Google Scholar] [CrossRef]
- Niu, X.; Liang, C.; Jing, X.; Wei, J.; Zhu, K. Experimental Investigation of Variable Geometry Turbine Annular Cascade for Marine Gas Turbines. In American Society of Mechanical Engineers Digital Collection; AMSE: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Orkisz, M.; Stawarz, S. Modeling of Turbine Engine Axial-Flow Compressor and Turbine Performance. J. Propuls. Power 2000, 16, 336–339. [Google Scholar] [CrossRef]
- Liu, Z.; Karimi, I.A. Gas turbine performance prediction via machine learning. Energy 2020, 192, 116627. [Google Scholar] [CrossRef]
- Lazzaretto, A.; Andrea, T. Analytical and Neural Network Models for Gas Turbine Design and Off-Design Simulation. Int. J. Thermodyn. 2001, 4, 173–182. [Google Scholar] [CrossRef]
- Bartolini, C.M.; Caresana, F.; Comodi, G.; Pelagalli, L.; Renzi, M.; Vagni, S. Application of artificial neural networks to micro gas turbines. Energy Convers. Manag. 2011, 52, 781–788. [Google Scholar] [CrossRef]
- Cortés, O.; Urquiza, G.; Hernández, J.A. Optimization of operating conditions for compressor performance by means of neural network inverse. Appl. Energy 2009, 86, 2487–2493. [Google Scholar] [CrossRef]
- Ghorbanian, K.; Gholamrezaei, M. An artificial neural network approach to compressor performance prediction. Appl. Energy 2009, 86, 1210–1221. [Google Scholar] [CrossRef]
- Li, B.; Gu, C.; Li, X.; Liu, T. Numerical optimization for stator vane settings of multi-stage compressors based on neural networks and genetic algorithms. Aerosp. Sci. Technol. 2016, 52, 81–94. [Google Scholar] [CrossRef]
- Liu, C.; Zou, Z.; Xu, P.; Wang, Y. Development of helium turbine loss model based on knowledge transfer with neural network and its application on aerodynamic design. Energy 2024, 297, 131327. [Google Scholar] [CrossRef]
- Galindo, J.; Luján, J.M.; Serrano, J.R.; Hernández, L. Combustion simulation of turbocharger HSDI Diesel engines during transient operation using neural networks. Appl. Therm. Eng. 2005, 25, 877–898. [Google Scholar] [CrossRef]
- Serrano, J.R.; Piqueras, P.; De la Morena, J.; Gómez-Vilanova, A.; Guilain, S. Methodological analysis of variable geometry turbine technology impact on the performance of highly downsized spark-ignition engines. Energy 2021, 215, 119122. [Google Scholar] [CrossRef]
- Serrano, J.; Climent, H.; Navarro, R.; González-Domínguez, D. Methodology to Standardize and Improve the Calibration Process of a 1D Model of a GTDI Engine; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Park, Y.; Choi, M.; Kim, K.; Li, X.; Jung, C.; Na, S.; Choi, G. Prediction of operating performance for industrial gas turbine combustor using an optimized artificial neural network. Energy 2020, 213, 118769. [Google Scholar] [CrossRef]
- Nikpey, H.; Assadi, M.; Breuhaus, P. Development of an optimized artificial neural network model for combined heat and power micro gas turbines. Appl. Energy 2013, 108, 137–148. [Google Scholar] [CrossRef]
- Campora, U.; Cravero, C.; Zaccone, R. Marine gas turbine monitoring and diagnostics by simulation and pattern recognition. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 617–628. [Google Scholar] [CrossRef]
- Bettocchi, R.; Pinelli, M.; Spina, P.R.; Venturini, M. Artificial Intelligence for the Diagnostics of Gas Turbines—Part I: Neural Network Approach. J. Eng. Gas Turbines Power 2006, 129, 711–719. [Google Scholar] [CrossRef]
- Fast, M.; Assadi, M.; De, S. Development and multi-utility of an ANN model for an industrial gas turbine. Appl. Energy 2009, 86, 9–17. [Google Scholar] [CrossRef]
- Park, Y.; Choi, M.; Choi, G. Fault detection of industrial large-scale gas turbine for fuel distribution performance in start-up procedure using artificial neural network method. Energy 2022, 251, 123877. [Google Scholar] [CrossRef]
- Rahmoune, M.B.; Hafaifa, A.; Kouzou, A.; Chen, X.; Chaibet, A. Gas turbine monitoring using neural network dynamic nonlinear autoregressive with external exogenous input modelling. Math. Comput. Simul. 2021, 179, 23–47. [Google Scholar] [CrossRef]
- Flagg, E.E. Analytical Procedure and Computer Program for Determining the Off-Design Performance of Axial Flow Turbines; NASA Report No. NASA-CR-710; Lewis Research Center: Cleveland, OH, USA, 1967. [Google Scholar]
- Kacker, S.C.; Okapuu, U. A Mean Line Prediction Method for Axial Flow Turbine Efficiency. J. Eng. Power 1982, 104, 111–119. [Google Scholar] [CrossRef]
- Ainley, D.G.; Mathieson, G.C.R. A Method of Performance Estimation for Axial-Flow Turbines; A.R.C. Technical Report No. 2974; Ministry of Supply: London, UK, 1951. [Google Scholar]
- Glassman, A.J. Modeling Improvements and Users Manual for Axial-Flow Turbine Off-Design Computer Code AXOD; NASA Report No. NASA-CR-195370; Lewis Research Center: Cleveland, OH, USA, 1994. [Google Scholar]
- Chen, S.-C.S. A Guide to Axial-Flow Turbine Off-Design Computer Program AXOD2; NASA Report No. NASA/TM-2014-218301; Lewis Research Center: Cleveland, OH, USA, 2014. [Google Scholar]
- Hanley, W.T. A Correlation of End Wall Losses in Plane Compressor Cascades. J. Eng. Power 1968, 90, 251–257. [Google Scholar] [CrossRef]
- Tabakoff, W. An experimental investigation on loss reduction in small guide vanes. In Proceedings of the 12th Propulsion Conference, Palo Alto, CA, USA, 26–29 July 1976. [Google Scholar] [CrossRef]
- Sullerey, R.K.; Kumar, S. A Study of Axial Turbine Loss Models in a Streamline Curvature Computing Scheme. J. Eng. Gas Turbines Power 1984, 106, 591–597. [Google Scholar] [CrossRef]
- de Jesus, G.S.; Barbosa, J.R.; Ramsden, K.W. A Comparison of Loss Models Using Different Radial Distribution of Loss in an Axial Turbine Streamline Curvature Program. In American Society of Mechanical Engineers Digital Collection; AMSE: New York, NY, USA, 2009; pp. 685–692. [Google Scholar] [CrossRef]
- Ito, S.; Eckert, E.R.G.; Goldstein, R.J. Aerodynamic Loss in a Gas Turbine Stage with Film Cooling. J. Eng. Power 1980, 102, 964–970. [Google Scholar] [CrossRef]
- Hartsel, J. Prediction of effects of mass-transfer cooling on the blade-row efficiency of turbine airfoils. In Proceedings of the 10th Aerospace Sciences Meeting, San Diego, CA, USA, 17–19 January 1972. [Google Scholar] [CrossRef]
- Bider, B.; Monroe, D.E.; Szanca, E.M.; Whitney, W.J. Cold-Air Investigation of a Turbine for High-Temperature-Engine Application. 3—Overall Stage Performance; NASA Report No. NASA/TN-D-4389; Lewis Research Center: Cleveland, OH, USA, 1968. [Google Scholar]
- Moffitt, T.P.; Monroe, D.E.; Szanca, E.M.; Whitney, W.J. Cold-Air Investigation of a Turbine For High-Temperature-Engine Application; NASA Report No. NASA/TN-D-3751; Lewis Research Center: Cleveland, OH, USA, 1967. [Google Scholar]
- Cherry, D.G.; Gay, C.H.; Lenahan, D.T. Energy Efficient Engine. Low Pressure Turbine Test Hardware Detailed Design Report; NASA Report No. NASA-CR-167956; Lewis Research Center: Cleveland, OH, USA, 1982. [Google Scholar]
- Bridgeman, M.J.; Cherry, D.G.; Pedersen, J. NASA/GE Energy Efficient Engine Low Pressure Turbine Scaled Test Vehicle Performance Report; NASA Report No. NASA-CR-168290; Lewis Research Center: Cleveland, OH, USA, 1983. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameters | Value |
|---|---|
| Design corrected rotational speed () | 4407.4 |
| Inlet total temperature () | 299.8 |
| Inlet total pressure () | 101,590 |
| Corrected mean blade speed | 152.40 |
| Expansion ratio | 1.798 |
| Corrected mass flow rate, () | 18.10 |
| Parameters | Value | |
|---|---|---|
| Outer diameter, cm (inches) | 76.2 (30) | |
| Mean diameter, cm (inches) | 66.04 (26) | |
| Inner diameter, cm (inches) | 55.88 (22) | |
| Number of stator blades | 50 | |
| Number of rotor blades | 61 | |
| Blade length, cm (inches) | 10.16 (4) | |
| Radial tip clearance, cm (inches) | 0.0762 (0.030) | |
| Geometric performance at the mean radius | Rotor blade | Stator blade |
| Leading edge radius-to-chord ratio | 0.065 | 0.066 |
| Trailing edge radius-to-chord ratio | 0.015 | 0.015 |
| Maximum thickness-to-chord ratio | 0.20 | 0.22 |
| Chord, cm (inches) | 5.82 (2.290) | 5.18 (2.263) |
| Solidity | 1.71 | 1.385 |
| Aspect ratio | 1.75 | 1.77 |
| Design Parameters | Value |
|---|---|
| Inlet total temperature, | 416.7 |
| Inlet total pressure, | 310 |
| Scale factor | 0.67 |
| Rotational speed, rpm | 3208.7 |
| Mass flow rate, () | 28.39 |
| Corrected rotational speed, | 157.18 |
| Total-to-total pressure ratio | 4.37 |
| Total-to-static pressure ratio | 4.76 |
| 70% | 100% | 130% | |
|---|---|---|---|
| , kg/s | 13.424 | 18.061 | 21.580 |
| η, % | 84.786 | 91.102 | 88.234 |
| 80% | 100% | 120% | |
|---|---|---|---|
| m, kg/s | 25.497 | 28.363 | 29.674 |
| η, % | 90.299 | 91.817 | 91.710 |
| Model Evaluation Index | Training Set | Cross-Validation Set | Testing Set | |||
|---|---|---|---|---|---|---|
| η | η | η | ||||
| 1 | 0.99999 | 1 | 0.99999 | 1 | 0.99999 | |
| 6.3485 | 0.15747 | 6.4536 | 0.15987 | 6.4266 | 0.16035 | |
| 4.713 | 0.10096 | 4.727 | 0.10185 | 4.7669 | 0.10289 | |
| 1.4415 | 1.2572 | 1.4436 | 1.2636 | 1.4564 | 1.2838 | |
| /° | /% | ||
|---|---|---|---|
| η | |||
| 3° | 3% | 2.4891 | 3.9663 |
| 3.5° | 1.5% | 1.8843 | 2.2223 |
| −6.5° | 6.5% | 15.925 | 42.787 |
| Model Evaluation Index | Training Set | Cross-Validation Set | Testing Set | |||
|---|---|---|---|---|---|---|
| η | η | η | ||||
| 1 | 0.99998 | 1 | 0.99997 | 1 | 0.99997 | |
| 8.1738 | 0.14632 | 8.7078 | 0.17007 | 8.4943 | 0.17416 | |
| 6.1049 | 0.10515 | 6.3357 | 0.11475 | 6.0959 | 0.11287 | |
| 1.1816 | 1.2216 | 1.2235 | 1.3426 | 1.172 | 1.3268 | |
| /° | /% | ||
|---|---|---|---|
| η | |||
| 6° | 2% | 2.9014 | 2.9092 |
| −5° | 3% | 2.6625 | 3.5857 |
| −8.5° | 9% | 8.6878 | 20.511 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, L.; Wu, H.; Liu, Y.; Xie, Q. Research on Surrogate Model of Variable Geometry Turbine Performance Based on Backpropagation Neural Network. Aerospace 2025, 12, 410. https://doi.org/10.3390/aerospace12050410
Deng L, Wu H, Liu Y, Xie Q. Research on Surrogate Model of Variable Geometry Turbine Performance Based on Backpropagation Neural Network. Aerospace. 2025; 12(5):410. https://doi.org/10.3390/aerospace12050410
Chicago/Turabian StyleDeng, Liping, Hu Wu, Yuhang Liu, and Qi’an Xie. 2025. "Research on Surrogate Model of Variable Geometry Turbine Performance Based on Backpropagation Neural Network" Aerospace 12, no. 5: 410. https://doi.org/10.3390/aerospace12050410
APA StyleDeng, L., Wu, H., Liu, Y., & Xie, Q. (2025). Research on Surrogate Model of Variable Geometry Turbine Performance Based on Backpropagation Neural Network. Aerospace, 12(5), 410. https://doi.org/10.3390/aerospace12050410