1. Introduction
With continuous progress being made in the field of human space exploration, the quantity of orbital debris has seen a dramatic rise [
1]. During the initial phase of space activities, the relatively small number of spacecrafts caused the dangers of space debris to be largely overlooked. The seriousness of this issue only gained widespread attention after D.J. Kessler and B.G. Cour-Palais introduced the concept of the “Kessler Syndrome” [
2]—a theoretical scenario where collisions among sizable debris fragments could trigger a chain reaction, leading to a densely packed field of orbital debris encircling the Earth. This escalating concentration of space junk now represents a substantial and growing hazard to spacecraft, affecting both their launch processes and extended operational life. Statistics from the European Space Agency (ESA) indicate that over 630 incidents have occurred in orbit, each playing a role in the worsening debris problem. As a result, implementing active debris removal strategies has become essential for maintaining the viability of future space missions.
Space debris is typically categorized into three classes—large debris (greater than 100 mm in diameter), medium debris (10–100 mm), and small debris (less than 10 mm). While shielding technologies [
3] offer effective protection against small debris, they are inadequate for protecting satellites against medium and large objects. As such, the active removal of medium- and large-sized debris has emerged as a central focus of current efforts. Current strategies for active debris removal fall broadly into two categories—contact-based and contactless methods. Contact-based approaches involve direct physical interaction with debris, employing technologies including robotic arms [
4] or tether-nets [
5], among others. These methods offer high precision but are often time-consuming. In contrast, contactless techniques [
6], including ion beams or laser ablation [
7], alter the orbital trajectories of debris without direct contact. These methods are more suitable for large-scale space debris removal missions.
Task planning for multi-target debris removal has become a focal point in contemporary research. To address the challenges of solution sparsity and entrapment in local optima that are inherent in large-scale debris removal mission planning, Xia et al. [
8] proposed a new hierarchical exploration artificial bee colony (HEABC) optimization algorithm. Bonnal et al. [
9] employed a weighted coefficient method to formulate a single-objective optimization problem that integrates delta-v and mission duration in order to enable the removal of multiple debris targets. As the volume of orbital debris continues to grow, the limitations of single-satellite operations—particularly in terms of removal technique and efficiency—have stimulated growing research into multi-satellite mission planning frameworks. For instance, Zhao et al. [
10] applied a simulated annealing algorithm to address task scheduling for multi-service satellites operating across space–ground hybrid zones. Similarly, Jing et al. [
11] investigated task planning for multiple servicing spacecraft (SSCs) involved in the clearance of geostationary orbit (GEO) debris. These spacecrafts, initially deployed within the GEO belt, must rendezvous with debris located at diverse orbital altitudes and inclinations, redirect them to graveyard orbits, and subsequently return to their initial positions. In another study, Missel J and Mortari D [
12] employ a genetic algorithm to optimize the trajectory of a Sling-Sat-based Space Sweeper system, aiming to complete the mission in under six months.
While the aforementioned studies primarily address long-term removal strategies for low-threat debris, scenarios involving multiple debris objects that pose imminent risks to high-value spacecraft require urgent removal strategies. In such cases, the deployment of highly maneuverable swarms of micro-nano satellites presents a promising approach for rapid threat mitigation. Recent research has increasingly focused on emergency debris removal strategies. For instance, Zhou et al. [
13] proposed a task planning method based on an improved reinforcement learning framework with online optimization to improve mission efficiency and facilitate rapid debris removal under strict time constraints. Similarly, Yang et al. [
14] introduced a “multi-satellite to multi-debris” task allocation strategy designed for time-sensitive scenarios, in which multiple spacecraft coordinate to remove multiple debris targets within a limited operational timeframe.
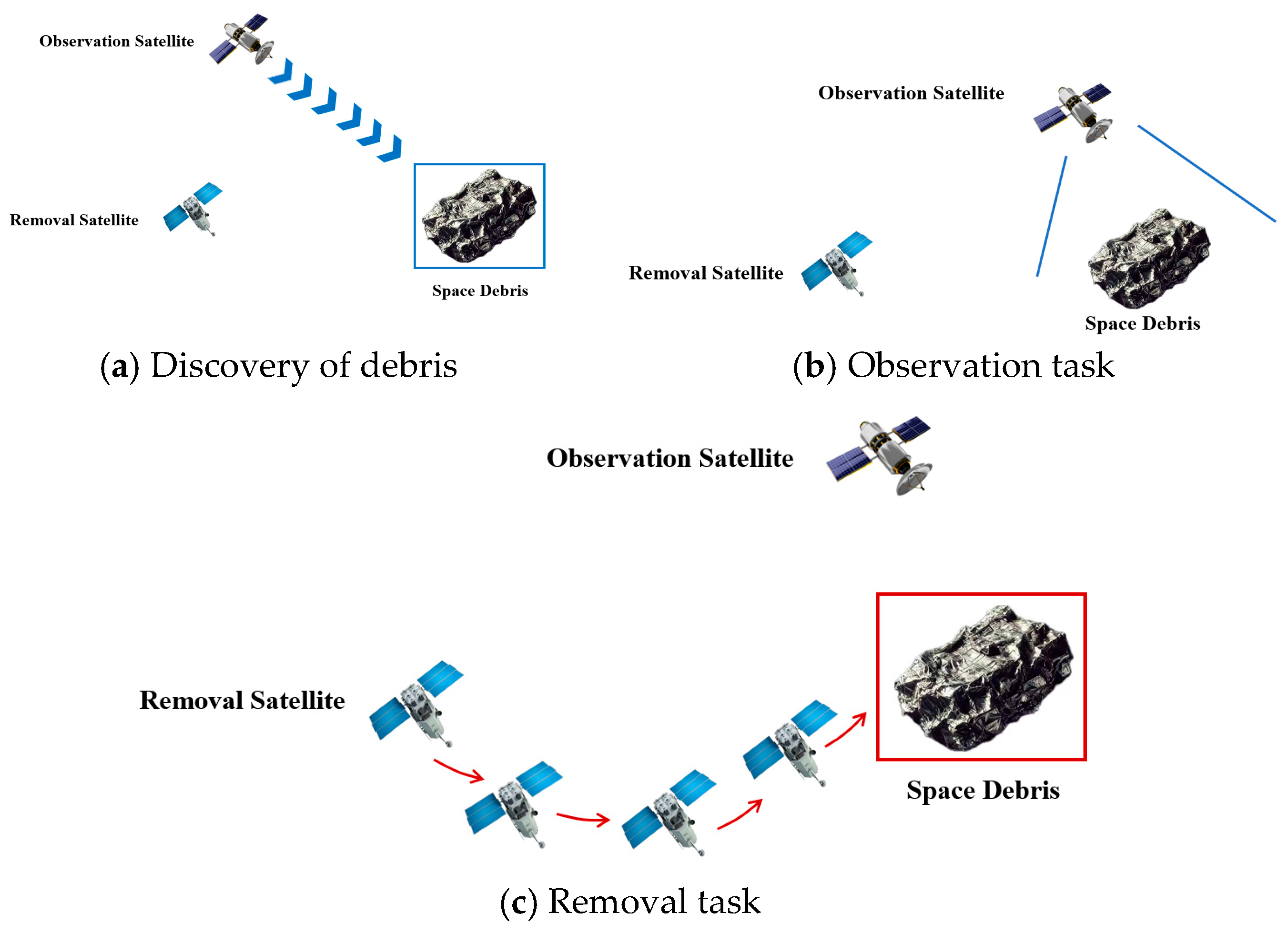
Given that space debris consists of non-cooperative objects, emergency removal missions involving multiple debris targets often lack precise prior positional information. Consequently, the initial step involves dispatching observation satellites to maneuver into close proximity in order to acquire accurate location data. Subsequently, removal satellites perform contactless debris removal at close range. Assigning observation and removal functions to a single satellite imposes considerable burdens on its payload capacity. In contrast, a heterogeneous satellite swarm—featuring complementary payload configurations—can effectively fulfill these operational requirements. Through coordinated operation, such swarms are capable of executing complex tasks with enhanced efficiency and adaptability. However, many current methods do not take into account heterogeneity [
15,
16].
The task allocation problem in a heterogeneous satellite swarm can be formulated as a multi-objective optimization problem with task coupling constraints. In general, solution methods can be categorized into two types—conventional methods and biologically inspired optimization methods. Conventional methods, such as dynamic programming (DP) [
17] and mixed integer linear programming (MILP) [
18], can yield optimal solutions but lead to prohibitive computational complexity when handling large-scale allocation problems. In order to reduce the computational complexity of algorithms, biologically inspired optimization methods have been widely employed, including particle swarm optimization (PSO) [
19,
20], ant colony optimization (ACO) [
21], genetic algorithm (GA) [
22,
23], and simulated annealing (SA) [
24]. These methods are more effective than traditional algorithms because they do not rely heavily on gradient information. However, these optimization methods may generate numerous infeasible solutions after the introduction of task coupling constraints, and random task allocation may result in deadlock.
A multi-type chromosome-encoding scheme [
25] is introduced to improve the Fast Elitist Non-Dominated Sorting Genetic Algorithm for multi-objective optimization—NSGA-II [
26]—and the MC-NSGA-II is constructed to solve the proposed heterogeneous satellite task allocation problem. The main contributions of this paper are summarized as follows: (1) A mathematical model of the “observation–removal” mission for multiple space debris by heterogeneous satellite swarms is formulated, including the mathematical model of mission coupling constraints and the objective function for evaluating the task allocation results. (2) The MC-NSGA-II algorithm is introduced, along with a multi-type chromosome-encoding scheme designed to produce feasible chromosomes that comply with the constraints of satellite heterogeneity and task coupling. Two distinct sorting methods are designed for crossover and mutation operations to ensure that all offspring individuals are feasible solutions. (3) A hybrid mutation mechanism consisting of two mutation operators, based on the task exchange strategy and allocation information mutation, is proposed to enhance the algorithm’s local search capability. (4) A dynamic parameter adjustment strategy is introduced to modify the populations for crossover and mutation, which, in turn, improves the overall efficiency of the algorithm.
The structure of this paper is outlined as follows. In
Section 2, the problem of heterogeneous satellite missions is introduced.
Section 3 offers an in-depth explanation of the proposed algorithm, covering chromosome encoding, genetic operations, and the dynamic adjustment strategy.
Section 4 showcases the simulation results and provides a comparison between the proposed algorithm and other existing ones. Finally,
Section 5 wraps up the paper.
3. Optimization Algorithm
To address the issues outlined in
Section 2, this paper introduces MC-NSGA-II, an enhancement of NSGA-II. This paper enhances chromosome coding, objective function computation, and genetic operations. Furthermore, a dynamic parameter-setting strategy during the iterative process is proposed. The complete algorithmic process is shown in
Figure 3.
3.1. Multi-Type Chromosome Encoding
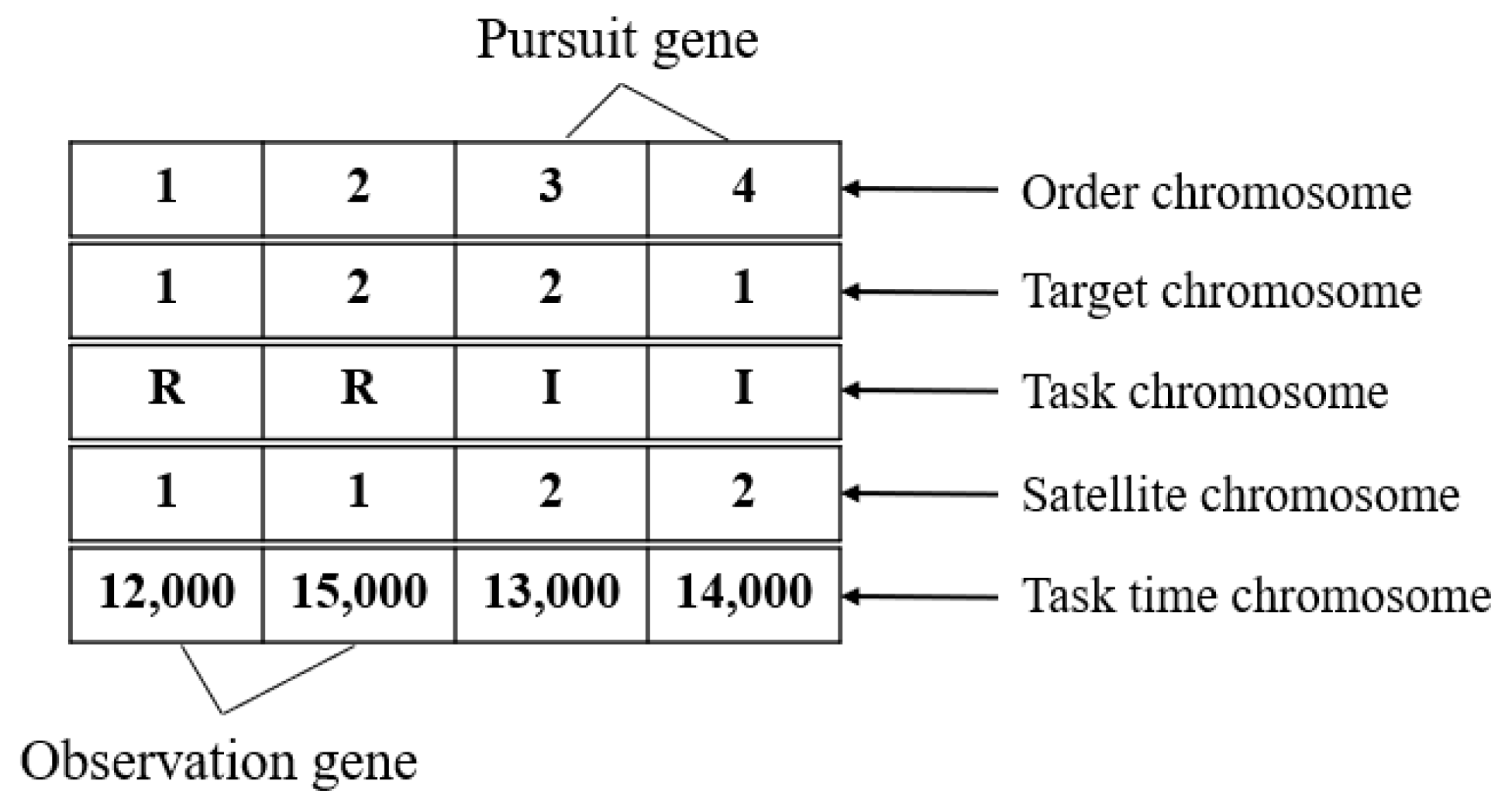
Multi-type chromosome encoding plays a pivotal role in the algorithm. As shown in
Figure 4, each individual is represented by a matrix consisting of five chromosomes—the order chromosome, the target chromosome, the task type chromosome, the satellite chromosome, and the task time chromosome. Each column of the matrix represents the assignment of a satellite to a specific task on a target within a designated task time.
Order chromosomes are used to determine the order in which each satellite performs tasks, not the order in which all tasks are performed. The target chromosome is a member of set . The task type chromosome is a specific task indicator, where R and I represent observation tasks and removal tasks, respectively. The satellite chromosome is selected from set . The task time chromosome represents the random time selected in the interval as the time when the satellite approaches the target to perform the task.
If the satellite performing the previous task has a later access time on the same target compared to the satellite performing the subsequent task, the latter must wait for the former to arrive and complete its assigned task. However, an arbitrary execution order of tasks may result in an infinite waiting cycle, leading to a deadlock.
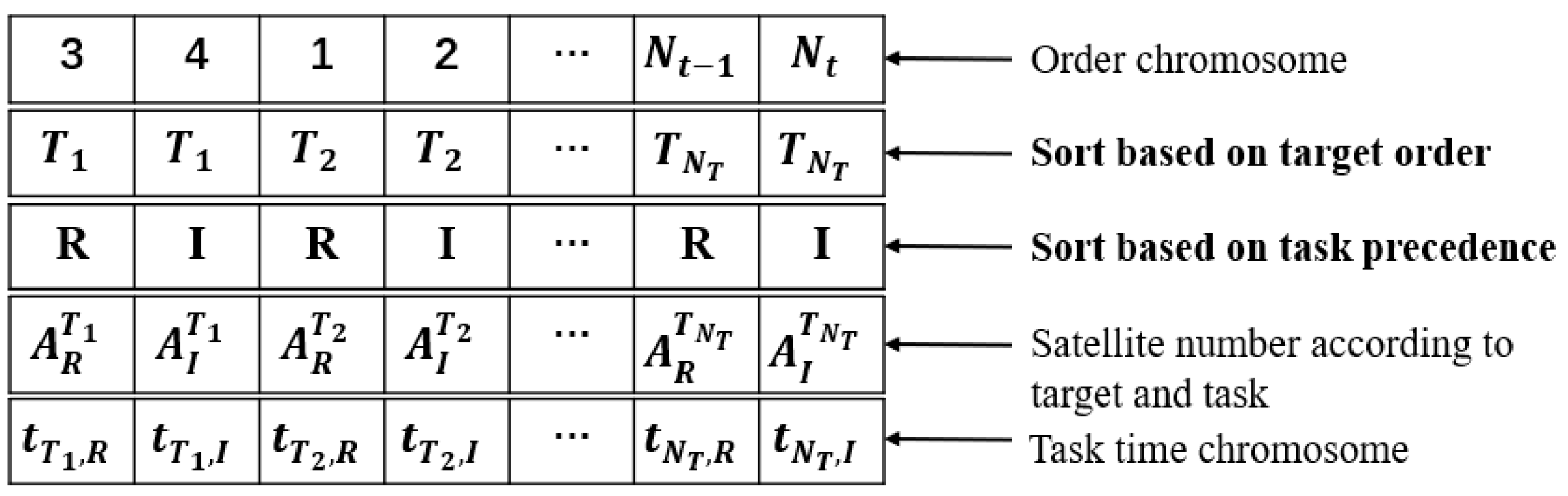
To satisfy the coupling constraints of tasks and to prevent deadlocks, a target-based multi-type chromosome-encoding method is proposed. Initially, the task execution order for the first row of chromosomes is generated, and
targets are randomly assigned to the second row. Subsequently, the genes are arranged in ascending order based on the target number, as shown in
Figure 5. The third row is organized based on the execution order of the task coupling constraints, and satellites with execution capabilities are matched according to the information in the second and third rows. The final row represents the task time. The multi-type chromosomes generated by this encoding scheme naturally avoid deadlock situations.
As shown in
Figure 5, the multi-type chromosome meets the task coupling constraints. Firstly, the satellites assigned in each gene (line 4) possess the necessary capabilities for performing the task (line 3). Furthermore, the execution order of tasks R and I demonstrates that they are not only executed but they are also carried out sequentially. Consequently, the multi-type chromosomes satisfy the task coupling constraints outlined in
Section 2.4.
3.2. Population Initialization
By employing the multi-type chromosome-encoding strategy outlined, the population initialization procedure is designed to ensure the feasibility of the genetic operation. The initialization step is the sequential creation of individuals containing order chromosomes, target chromosomes, task type chromosomes, satellite chromosomes, and task time chromosomes in order.
3.3. Fitness Calculation
The three optimization objectives outlined in
Section 2 serve as the objective function for calculating fitness.
Here,
is the number of objective functions.
The satellite-based chromosome is derived by rearranging the satellite-based multi-chromosomes, as shown in
Figure 6.
It is assumed that when two tasks for a target are performed by the same satellite, both tasks can be completed simultaneously, meaning that only the time and fuel consumption required for the first task need to be calculated.
3.4. Genetic Operation
Genetic operations are a key component of the optimization algorithm, encompassing chromosome selection, elite chromosome retention, crossover, and mutation operations. The roulette wheel selection technique is applied to select parent chromosomes for the mating pool, ensuring that chromosomes with superior fitness values have a higher probability of being chosen. The elite retention operator is applied to retain the parental chromosomes with the highest dominance level in the offspring population. This paper proposes a method to modify the crossover and mutation operators based on the multi-type chromosome-encoding strategy. All offspring chromosomes generated adhere to the task coupling constraints of the task allocation model, ensuring the optimization efficiency of the crossover and mutation operations.
3.4.1. Crossover Operation
The crossover operation swaps genetic information between two selected parent chromosomes, resulting in the creation of two offspring chromosomes. The purpose is to enhance the global search capability through the exchange of information. In the proposed MC-NSGA-II algorithm, a two-point crossover operator is used to produce
offspring chromosomes. An example of the crossover process is shown in
Figure 7.
As depicted in
Figure 7, the target-based chromosome is derived before the crossover between the two parent chromosomes, ensuring that the information in the second and third rows remains unchanged after the crossover. This operation alters the execution order (line 1), the satellite (line 4), and the task time (line 5), while the satellite, after the exchange, still retains the ability to perform the task. This operation satisfies both the task coupling constraint and the satellite capability constraint.
3.4.2. Mutation Operation
The mutation operation’s goal is to enhance local search capability by introducing variations in the gene. In this paper, two mutation operators for producing offspring chromosomes are proposed.
- (a)
Mutation based on the task exchange strategy: In addition to the task execution time, the number of feasible solutions of other decision variables is limited. Therefore, this paper proposes a mutation operator to exchange the allocation information.
Figure 8 shows an implementation example.
As shown in
Figure 8, the chromosomes are reordered based on the priority order of the third-line task type, and the task allocation information is exchanged accordingly. The mutation process only swaps the allocation of the selected task, ensuring that the offspring chromosome remains in compliance with the task coupling constraint.
- (b)
Allocation information mutation: A mutation site is chosen randomly, and the satellite assigned to the mutation site undergoes mutation. The implementation is shown in
Figure 9.
As illustrated in
Figure 9, the satellite at the mutation site has undergone mutation. The satellite sets with distinct capabilities are labeled as
and
, respectively. If multiple capable satellites exist in the corresponding satellite set, one is randomly selected.
3.4.3. Dynamic Setting Strategy
A dynamic setting for the genetic operations is introduced. The proposed MC-NSGA-II algorithm adjusts the number of offspring chromosomes produced by crossover and mutation in each iteration.
The offspring population was made up of
chromosomes generated through the elite operation,
chromosomes produced by the crossover operation, and
chromosomes produced by the mutation operation. The subjective selection of parameters
,
, and
will affect the performance of the algorithm. In order to avoid this problem, the proposed dynamic setting strategy dynamically adjusts the parameters
and
according to the iteration time.
Here,
and
represent the current number of iterations and the total number of iterations, respectively.
In the early stages of iteration, the crossover population is relatively large and the genetic operations emphasize improving the algorithm’s global search capability. As the iteration progresses, the mutation population increases, with genetic operations focusing on enhancing local search capability, thus speeding up the algorithm’s convergence.
4. Simulations and Analysis
According to the multi-objective optimization algorithm proposed in
Section 3, the task allocation problem is simulated to verify the proposed MC-NSGA-II algorithm.
The satellite swarm is required to perform observation and removal tasks on multiple targets. The effectiveness of the proposed algorithm is demonstrated by solving the task allocation problem using the MC-NSGA-II algorithm and analyzing the resulting task allocations. Furthermore, the simulation employs several multi-objective optimization algorithms to address the same problem. By comparing the non-dominated solutions, the superiority of the enhanced NSGA-II algorithm is demonstrated.
4.1. The Simulation Settings
In the mission window of [0, 50,000 s], suppose that the satellite swarm consists of three heterogeneous satellites—observation satellites, removal satellites, and multifunctional satellites. The swarm target comprises multiple space debris. The mission involves the satellites performing observation and removal tasks on each debris in turn. The initial parameters are presented in
Table 1 and
Table 2.
4.2. Effectiveness Analysis
To demonstrate the effectiveness of the proposed algorithm, this paper conducts task allocation experiments in three scenarios and analyzes the task allocation results from each scenario.
- A.
Scenario I (three satellites on two targets)
Scenario I consists of the three satellites shown in
Table 1 and two targets selected from
Table 2. The task allocation results are shown in
Table 3, and the orbit simulation result is shown in
Figure 10.
From
Table 3, the task allocation results of the satellites (shown in
Table 4) and the task completion results based on the targets (shown in
Table 5) can be obtained, respectively.
As shown in
Table 4, Satellite No. 1 performs observation tasks on Target No. 1, Satellite No. 2 performs removal tasks on Target No. 1, and Satellite No. 3 performs both observation and removal tasks on Target No. 2. The execution results satisfy the allocation, fuel consumption, and capacity constraints described in Equations (7)–(9). As shown in
Table 5, the observation task for each target is performed before the removal task, satisfying the task coupling constraint outlined in Equation (10).
- B.
Scenario II (three satellites on three targets)
Scenario II is composed of the three satellites in
Table 1 and three targets selected from
Table 2. The task allocation results are shown in
Table 6, and the orbit simulation result is shown in
Figure 11.
From
Table 6, the task allocation results of the satellites (shown in
Table 7) and the task completion results based on the targets (shown in
Table 8) can be obtained, respectively.
As shown in
Table 7, Satellite No. 1 performs observation tasks on Targets No. 2 and No. 1, respectively; Satellite No. 2 performs removal tasks on Targets No. 2 and No. 1, respectively; and Satellite No. 3 performs both observation and removal tasks on Target No. 3. The execution results satisfy the allocation, fuel consumption, and capacity constraints described in Equations (7)–(9). As shown in
Table 8, the observation task for each target is performed before the removal task, satisfying the task coupling constraint outlined in Equation (10).
- C.
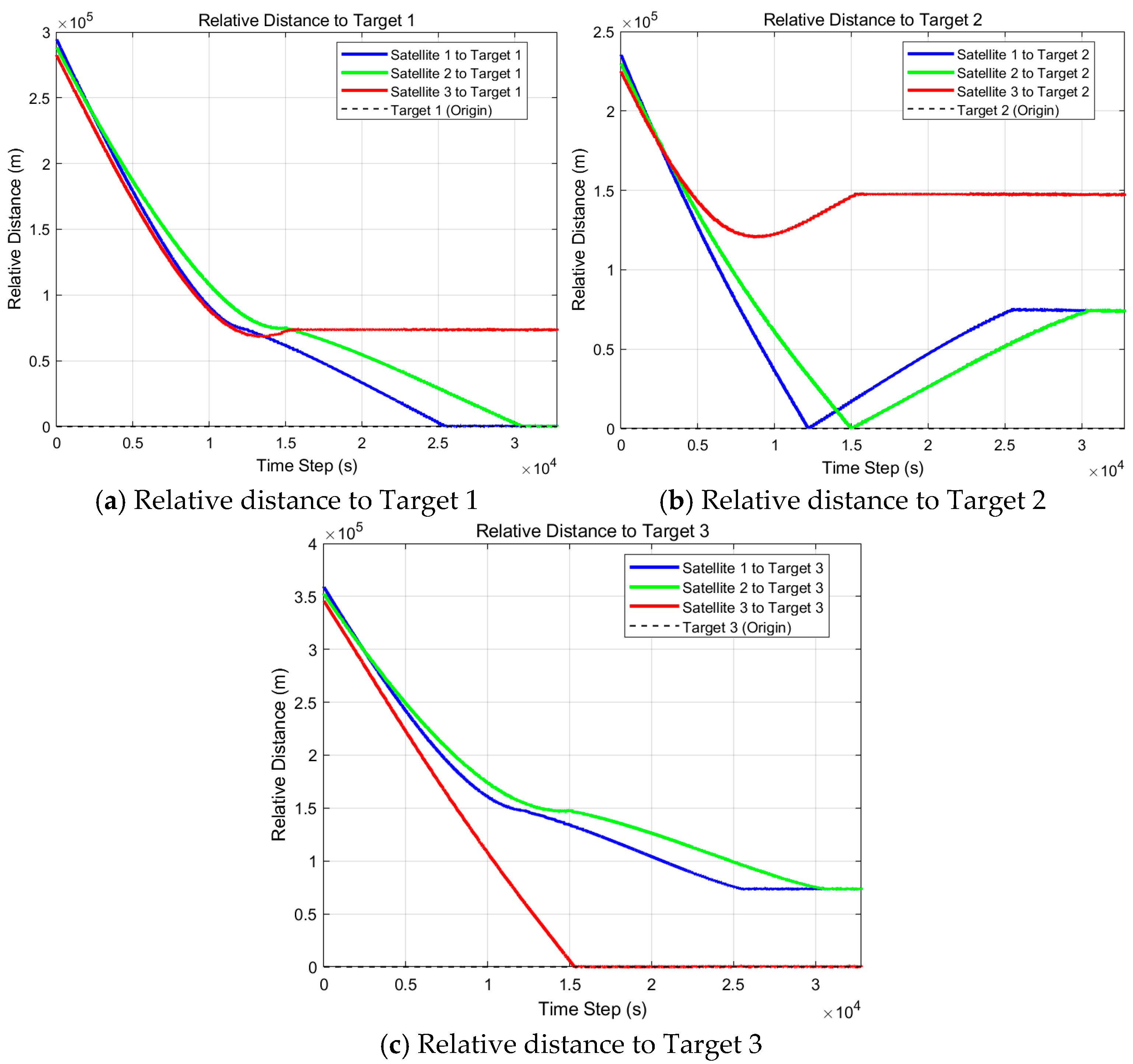
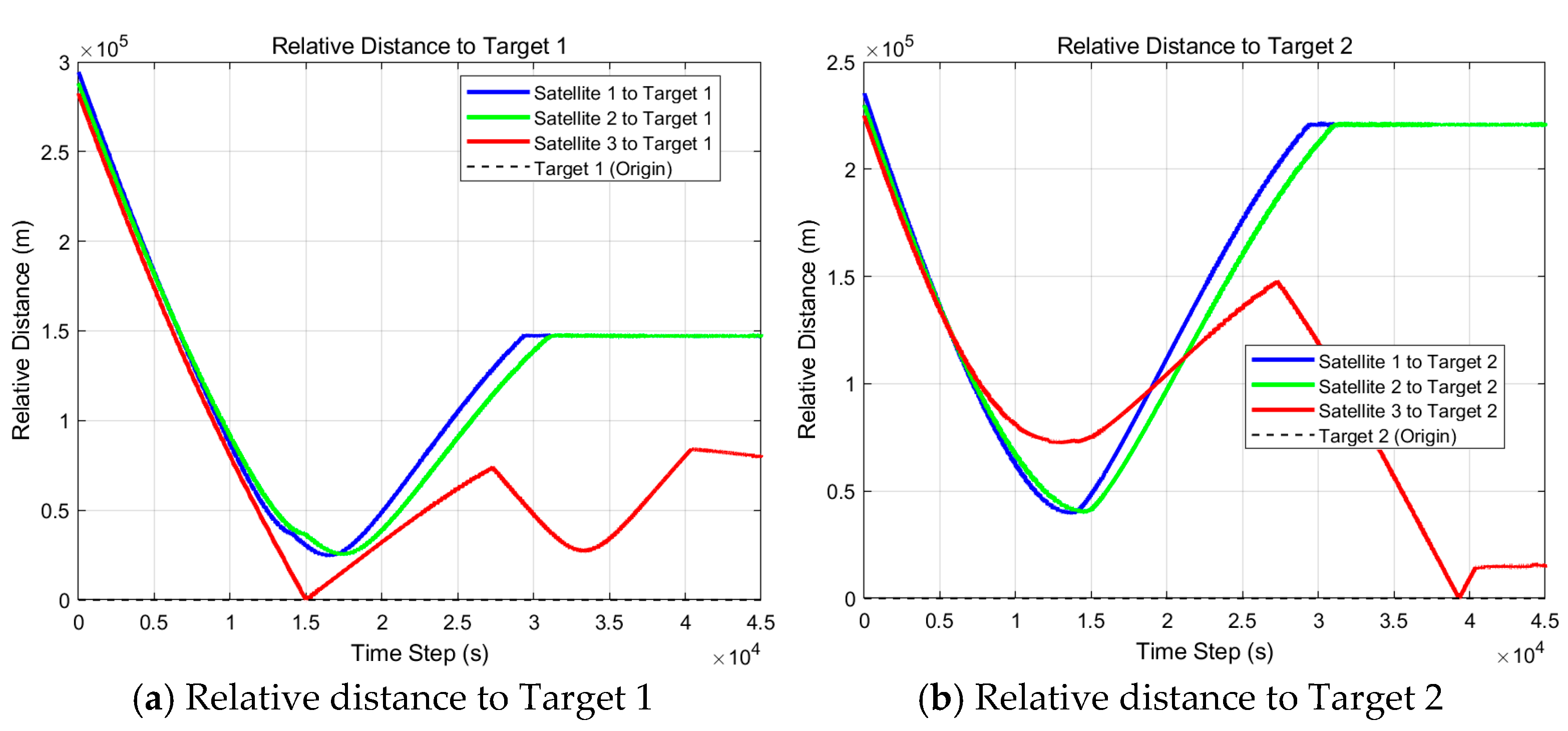
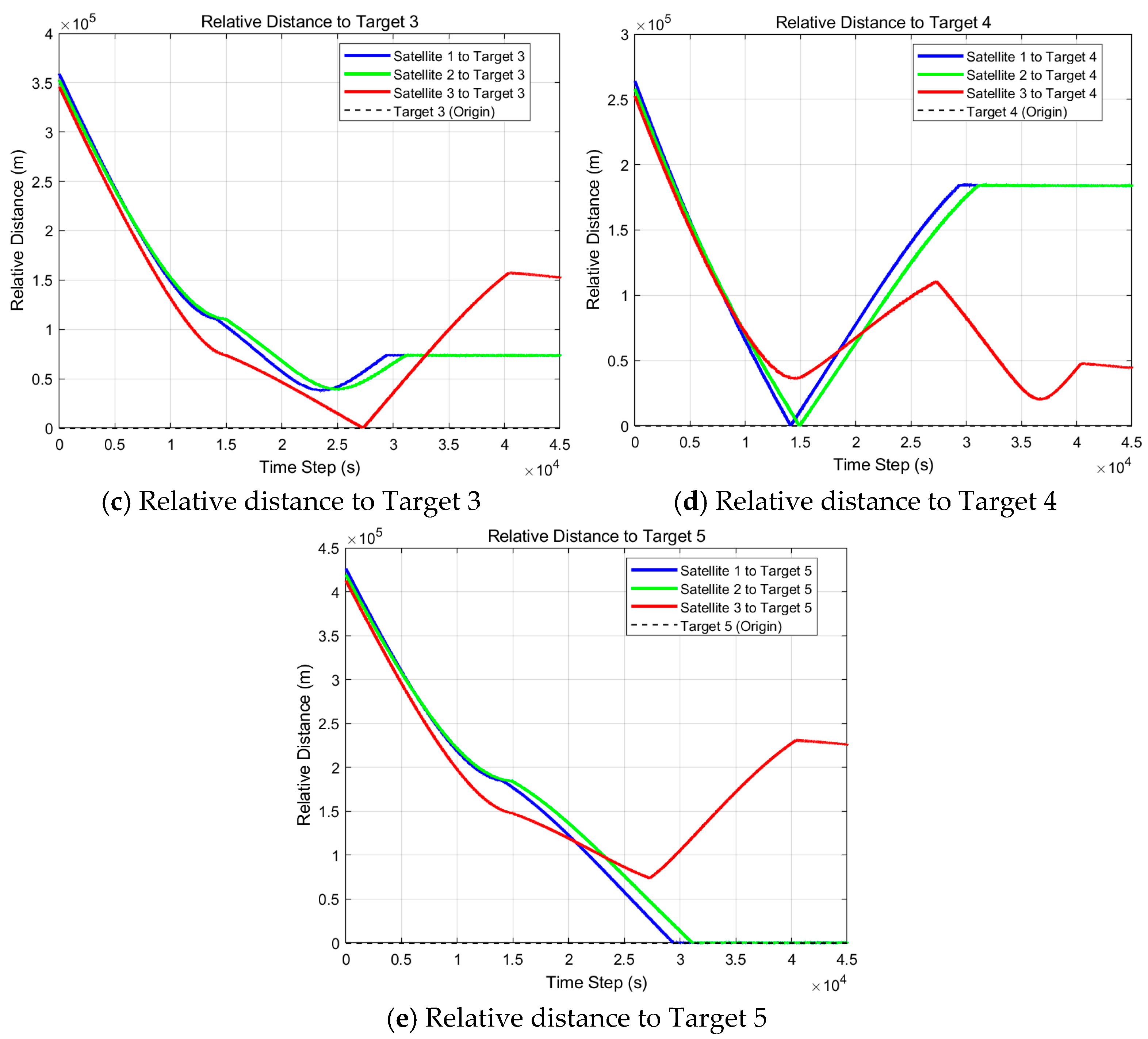
Scenario III (three satellites on five targets)
Scenario III is composed of three satellites and five targets. The task allocation result is shown in
Table 9, and the orbit simulation results are shown in
Figure 12.
From
Table 9, the task allocation results of the satellite (shown in
Table 10) and the task completion results based on the target (shown in
Table 11) can be obtained, respectively.
It can be seen from
Table 10 that the task allocation plan is as follows:
As shown in
Table 10, Satellite No. 1 performs observation tasks on Targets No. 4 and No. 5 in turn; Satellite No. 2 performs removal tasks on Targets No. 4 and No. 5 in turn; and Satellite No. 3 performs both observation and removal tasks on Targets No. 1, No. 3, and No. 2 in turn. The execution results satisfy the allocation, fuel consumption, and capacity constraints described in Equations (7)–(9). As shown in
Table 11, the observation task for each target is performed before the removal task, satisfying the task coupling constraint outlined in Equation (10).
Through the simulation experiments of Scenarios I–III, we can conclude that it is feasible to use MC-NSGA-II to solve the problem of task allocation for heterogeneous satellite swarm, satisfying the relevant constraints.
4.3. Comparative Analysis
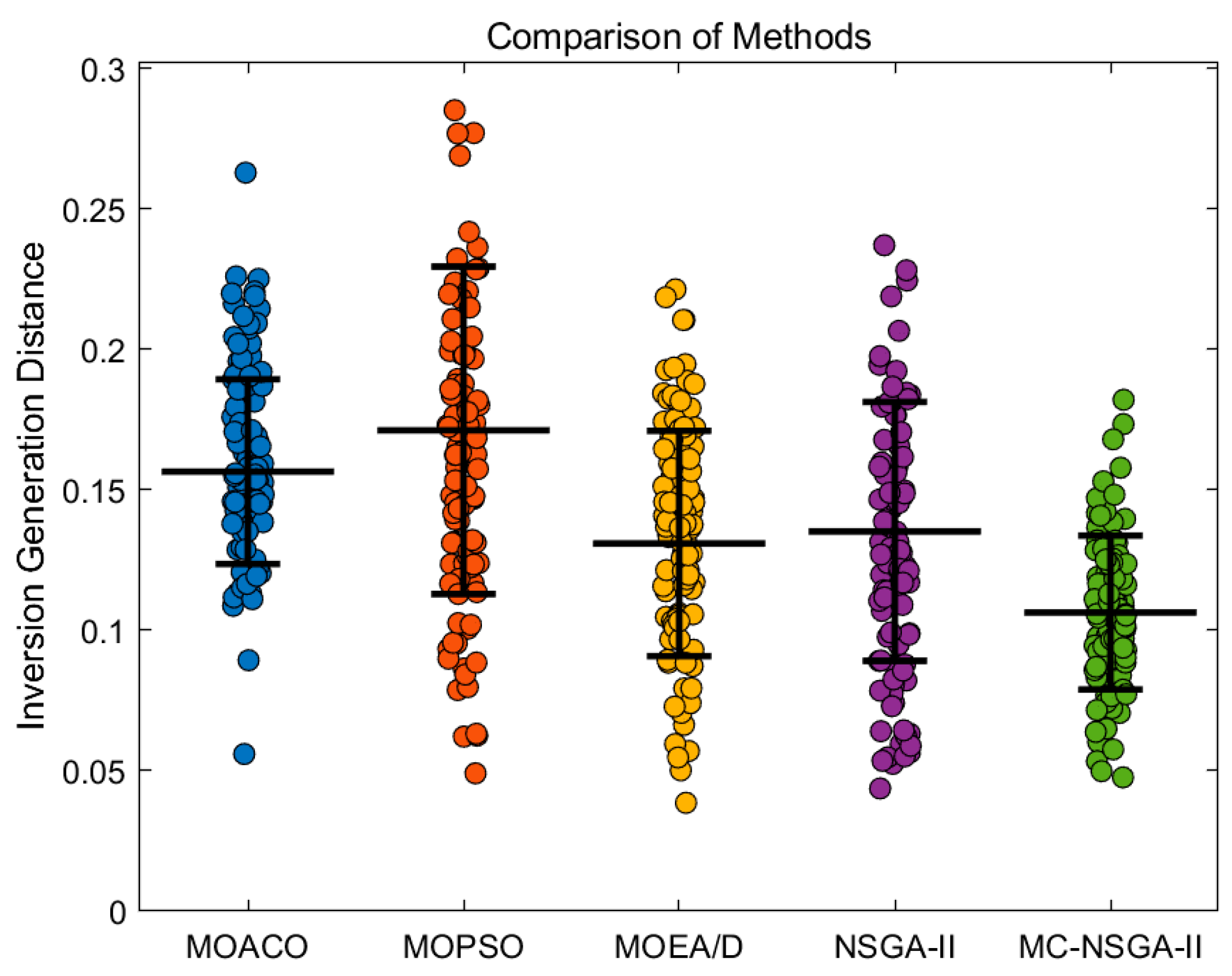
To demonstrate the superiority of the proposed MC-NSGA-II algorithm, 100 Monte Carlo simulations are conducted for various algorithms under the conditions of Scenario II. When the Pareto front is unknown, the virtual ideal solution set is constructed to evaluate the algorithm’s performance. Two performance indices are proposed to evaluate these algorithms—inversion generation distance (IGD) and hypervolume (HV).
Five algorithms are compared—the multi-objective ant colony algorithm (MOACO) [
29], the multi-objective particle swarm optimization (MOPSO) [
30], the multi-objective evolutionary algorithm based on decomposition (MOEA/D) [
31], the standard NSGA-II [
26], and the MC-NSGA-II. The core idea of MOACO is to utilize the cooperative behavior of ants to construct a solution set that satisfies the requirements of multiple objectives during the search process. The MOPSO introduces the dominance relation and the external repository as the basis for comparison. MOEA/D is an evolutionary algorithm based on scalar functions. The standard NSGA-II enhances GA by incorporating the non-dominated sorting operation. The basic parameters are provided in
Table 12.
All these algorithms are tested with the same population size and maximum number of iterations. The population size is set to 100, and the maximum number of iterations is 100. Each algorithm is executed independently 100 times, and the mean and standard deviation of IGD and HV are recorded for comparison.
The IGD metric is employed to assess both the proximity and distribution uniformity between the algorithm-generated non-dominated solution set and the true Pareto optimal front.
Figure 13 illustrates the IGD for these algorithms. MC-NSGA-II performs the best among all algorithms by virtue of the lowest IGD mean, which implies that MC-NSGA-II’s ability to find the optimal solution is the strongest. NSGA-II also has a strong ability to find high-quality solutions, but the stability of evolutionary operations is poor. The MC-NSGA-II outperforms the standard NSGA-II by 23.07%. By improving the coding method, as well as the genetic and mutation operations, the efficiency of searching for the effective solution set is enhanced, resulting in satisfactory convergence.
The HV metric is utilized to evaluate the quality of non-dominated solution sets, reflecting both solution diversity and approximation accuracy.
Figure 14 displays the HV index of each algorithm. The MC-NSGA-II improves the weight of mutation operation in the later stage of the algorithm through dynamic genetic operation settings, so as to improve the diversity of understanding while stabilizing convergence. MC-NSGA-II has the highest average value of HV, which means that the MC-NSGA-II algorithm has the strongest space exploration capability. At the same time, the HV values of MOEA/D and NSGA-II are also higher than those of the other algorithms, except MC-NSGA-II, highlighting the effectiveness of genetic operations in finding feasible solutions.
Based on the above analysis, the MC-NSGA-II improves the ability of finding high-quality feasible solutions. This is achieved through a novel gene coding method, dynamic genetic operation parameter control, and an improved crossover and mutation strategy. The improved algorithm enhances the random search capability of the standard NSGA-II.
5. Conclusions
To address emergency debris removal scenarios involving a swarm of space debris and a heterogeneous satellite swarm equipped with diverse payloads, this paper proposes the MC-NSGA-II. The main conclusions are as follows.
A mathematical model is constructed to represent the heterogeneous satellite swarm while considering task coupling constraints. To evaluate different allocation strategies effectively, three optimization objectives are introduced. Multi-type chromosome encoding is proposed to address task coupling constraints, generate feasible solutions that satisfy these constraints, and improve the efficiency of searching for effective solution sets. Improved genetic operators are designed to generate feasible solutions. In addition, the algorithm introduces dynamic parameter control and a hybrid mutation mechanism. By comparing it with other algorithms, the effectiveness of the improved algorithm is demonstrated. The results show that the high-quality solution search ability of the MC-NSGA-II algorithm is 23.07% higher than that of the standard NSGA-II algorithm.
Furthermore, the dynamic positioning problem can be explored further. Considering the failure of some satellites or other unexpected events, rolling optimization is used to solve the reallocation strategy.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}