
Multi-Point Optimization Design of Blended Wing Body Based on Discrete Adjoint Method


Abstract
1. Introduction
2. Simulation Method
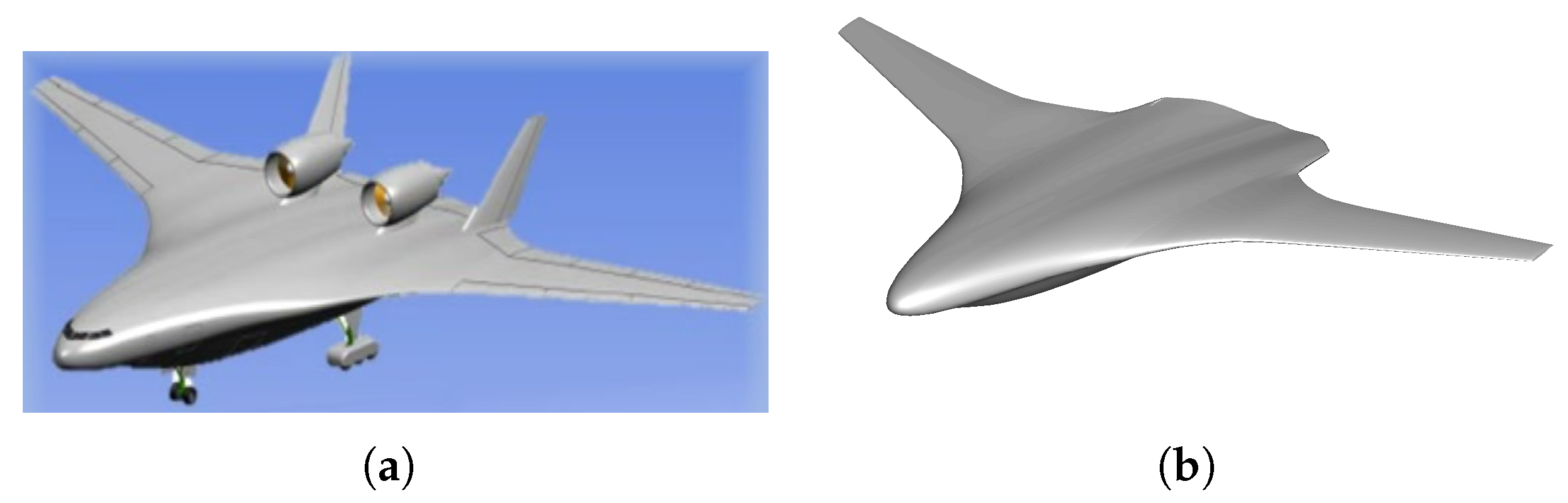
2.1. Wing Model
2.2. Numerical Methodologies
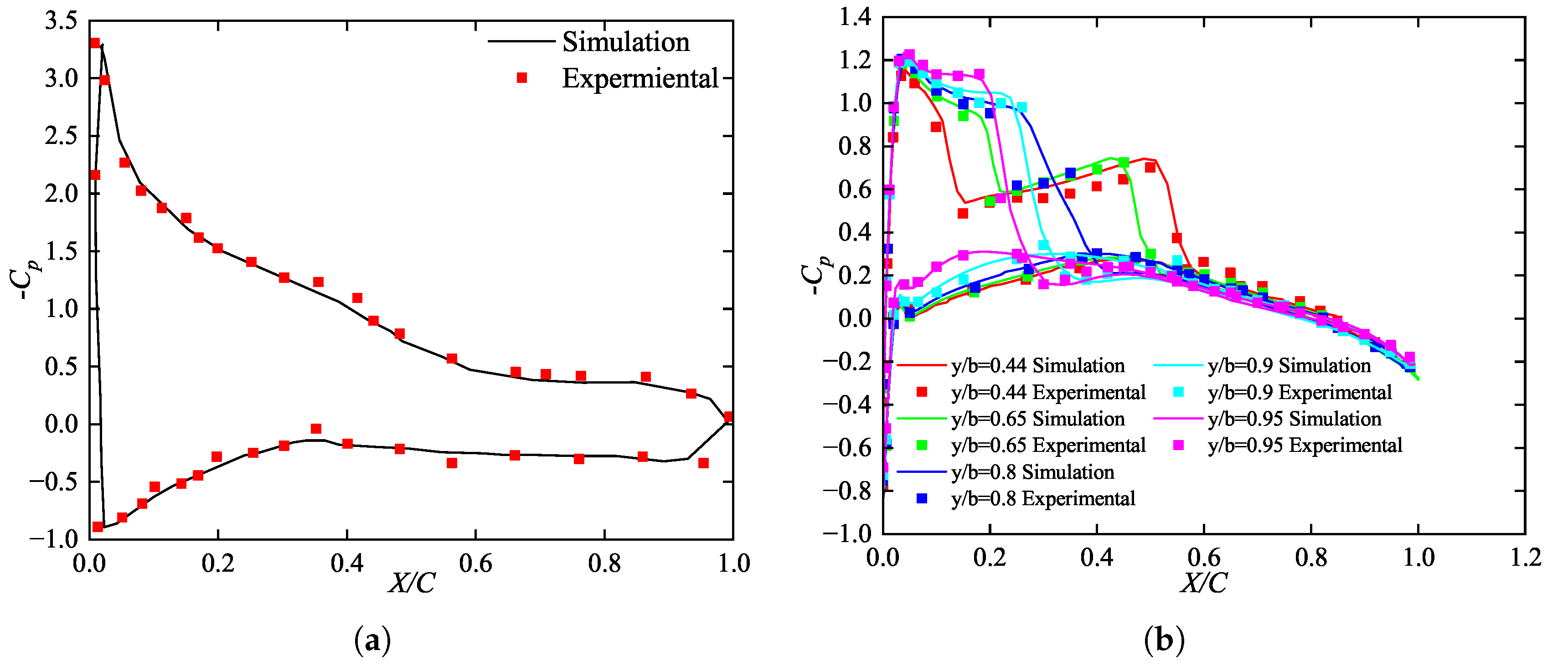
2.3. Solver Validation
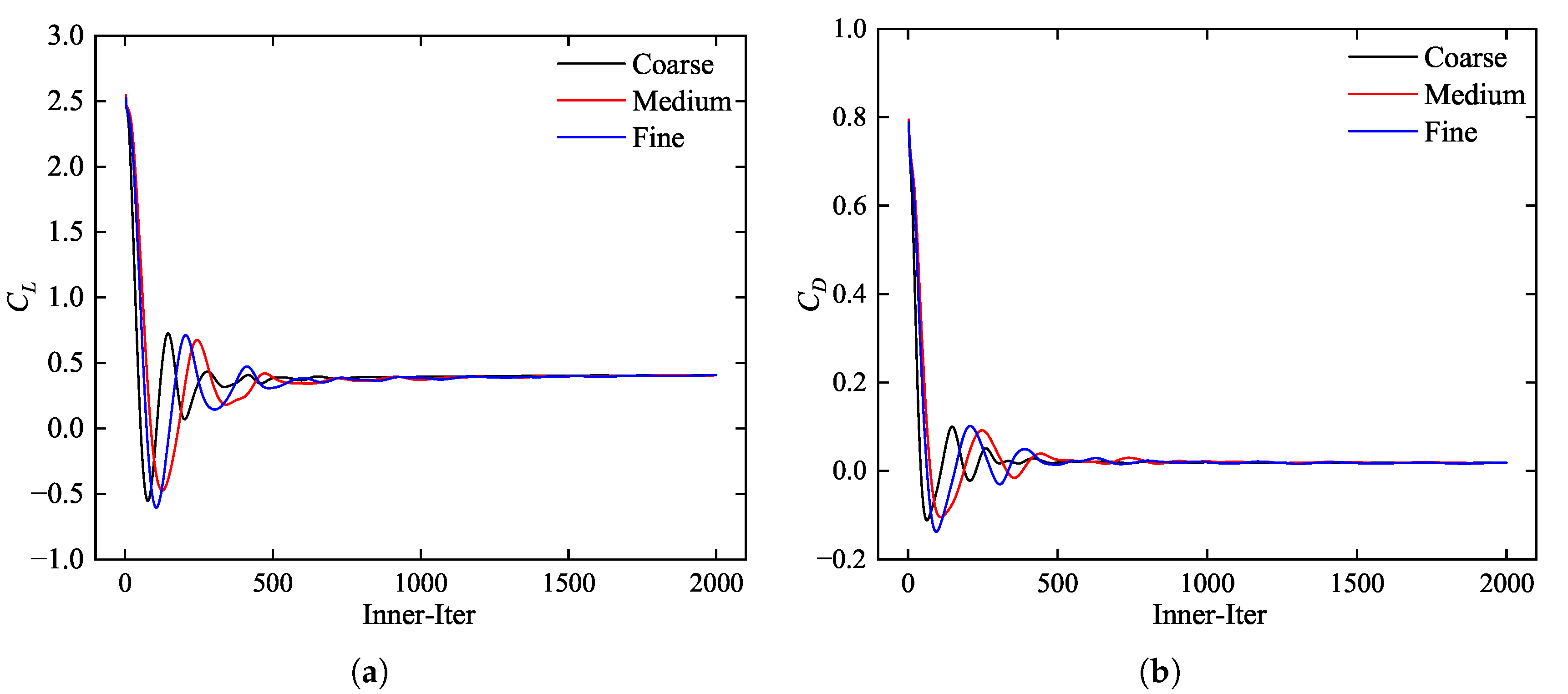
2.4. Mesh Independence Study
3. Optimization Method
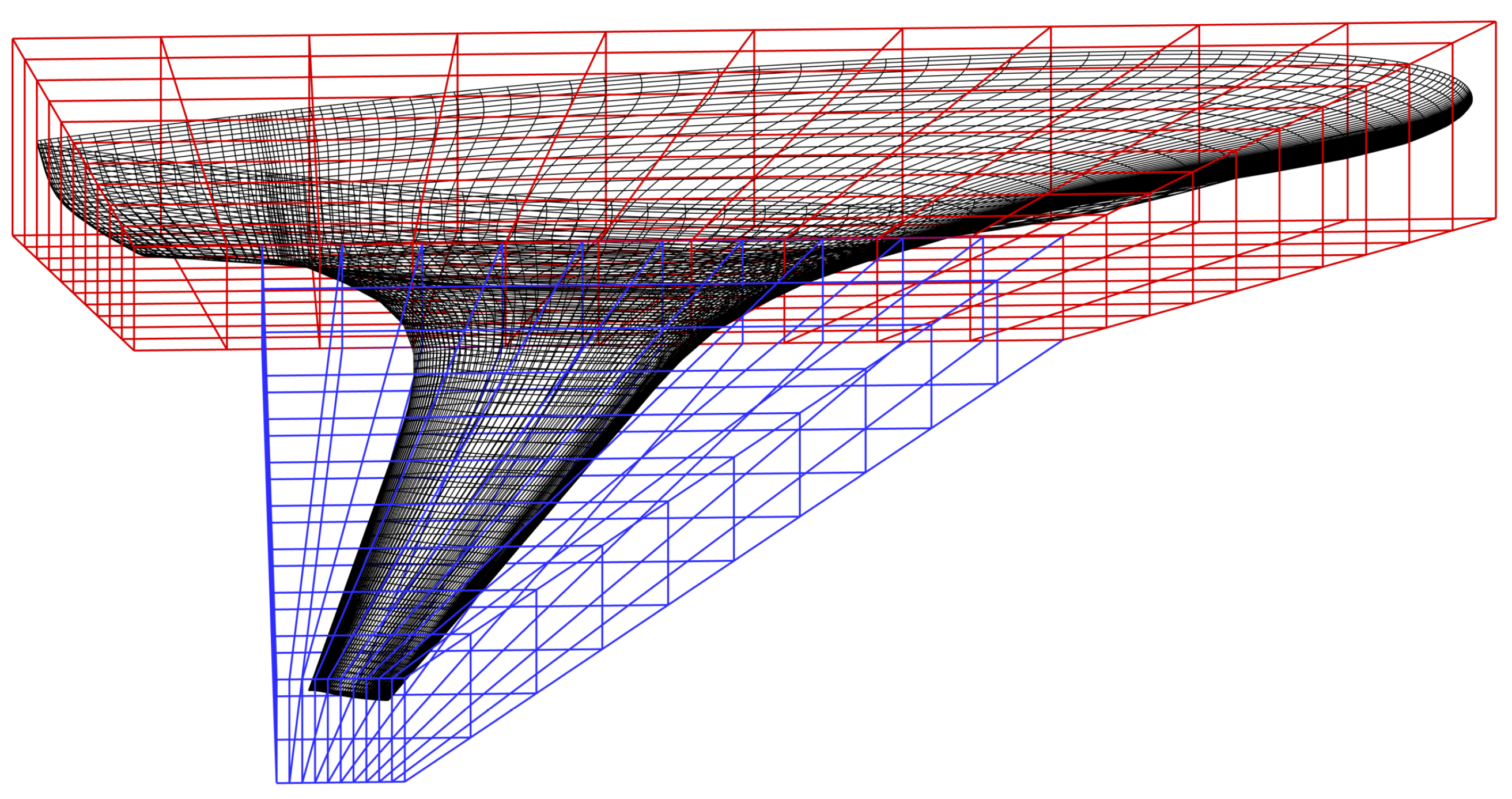
3.1. Parametric Modeling: Free Form Deformation (FFD)
3.2. Mesh Deformation: Elastomeric Method
3.3. Discrete Adjoint Method
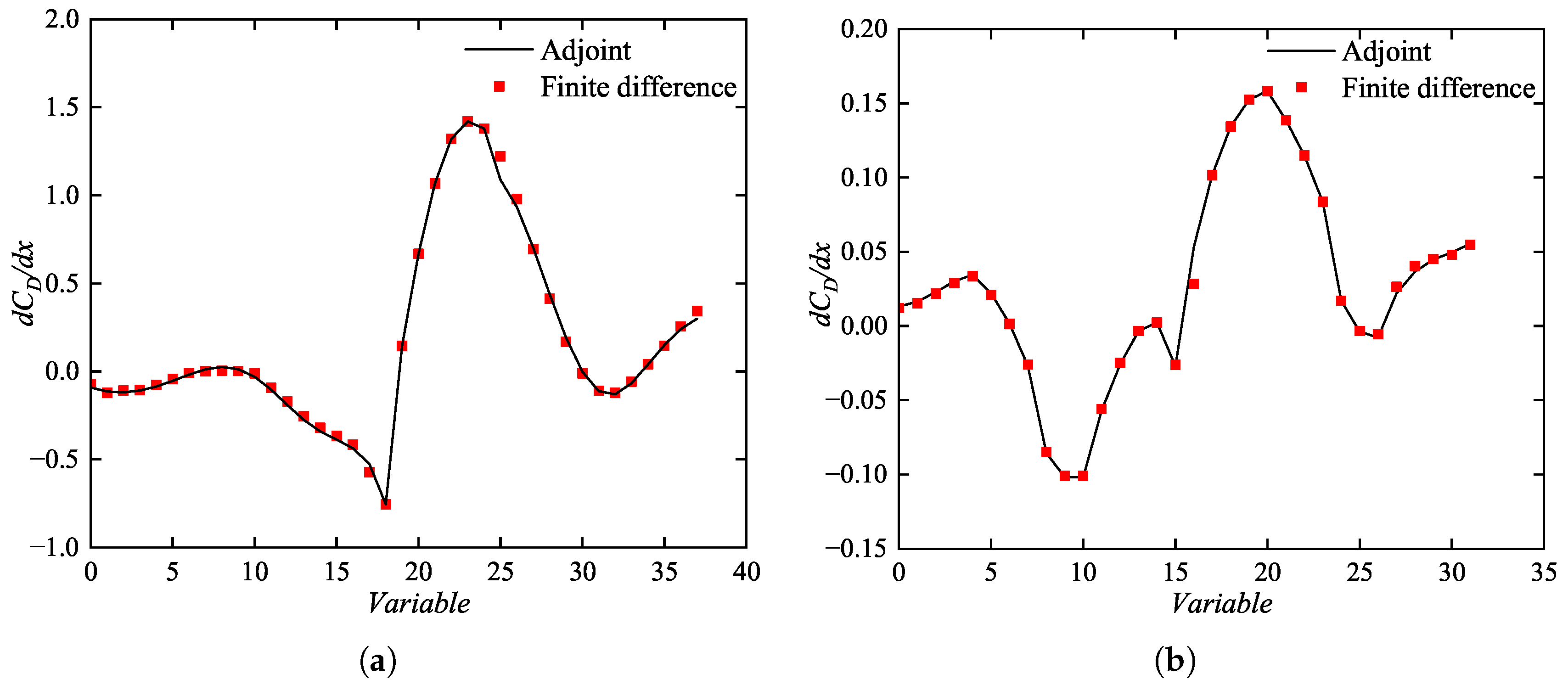
Adjoint Gradient Accuracy Validation
3.4. Optimization Algorithm: Sequential Least Squares Programming (SLSQP)
3.5. Computing Platform: SU2 Solver
4. Aerodynamic Shape Optimization Design
4.1. Optimization Configuration One
- is the lift coefficient.
- is the initial lift coefficient, which ensures the balance between lift and gravity during flight through the constant lift constraint.
- is the pitch moment coefficient after optimization.
- is the initial pitch moment coefficient.
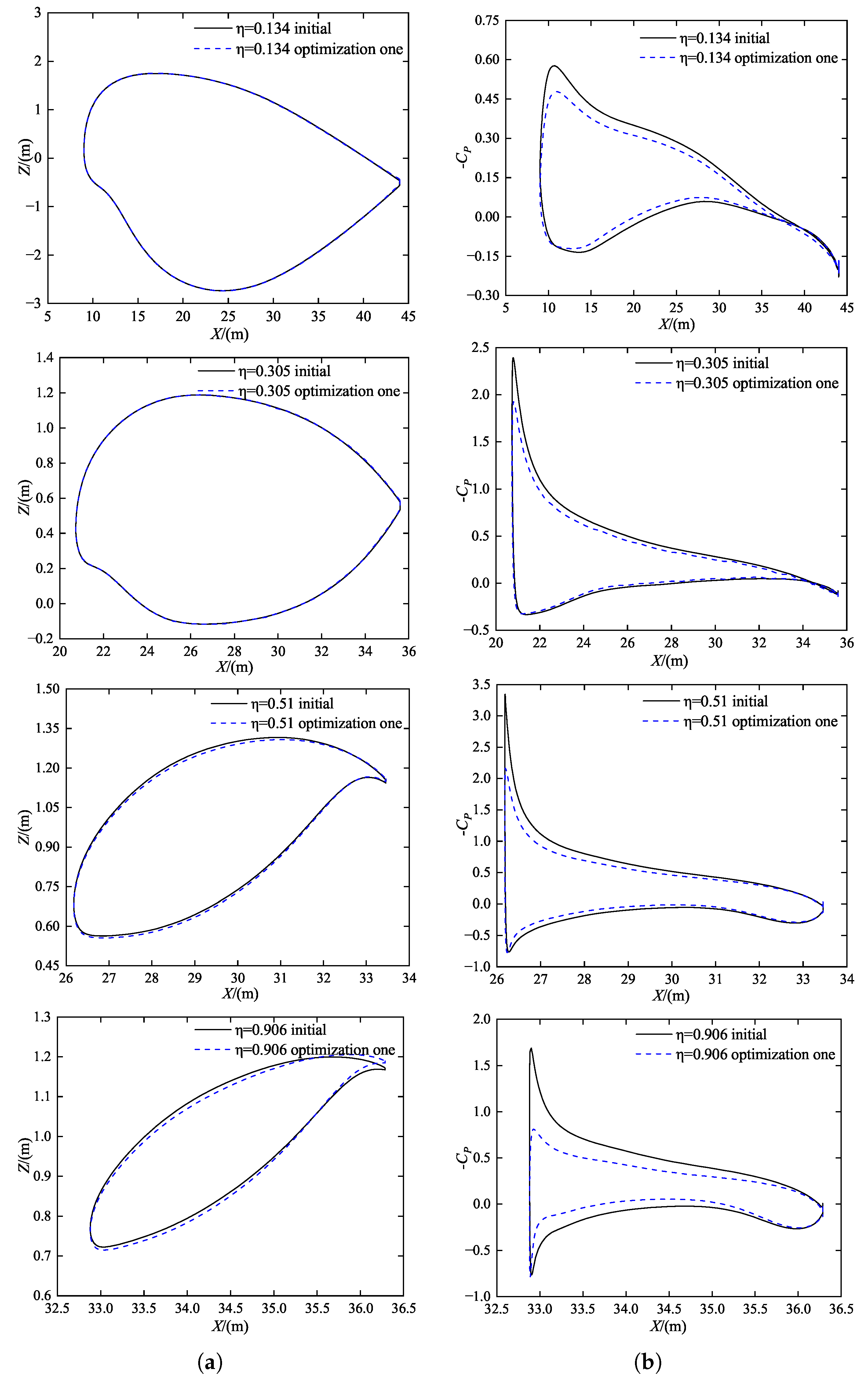
- and , and , and , and represent the optimized and original airfoil thicknesses at four sections (, , , ) along the BWB. These sections’ airfoil thickness should not decrease after optimization.
4.2. Optimal Design Problem Configuration Two
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BWB | Blended Wing Body |
| CFD | Computational Fluid Dynamics |
| FFD | Free Form Deformation |
| SLSQP | Sequential Least Squares Programming |
| RANS | Reynolds-Averaged N-S Equations |
| SST | Shear Stress Transport |
References
- Sun, Y.; Wang, Y.; Cheng, W.; Wang, M.X.; Yang, M. Analysis and Prospect of Blended-Wing-Body Configuration Technology Development of Civil Aircraft. Aeronaut. Sci. Technol. 2023, 34, 1–12. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, B.Q.; Zhang, M.H.; Sang, W.M.; Yuan, C.S. Research progress and prospect for conceptual and aerodynamic technology of blended-wing-body civil aircraft. Acta Aeronaut. Astronaut. Sin. 2019, 40, 623046. [Google Scholar]
- Lei, G.D.; Xu, Y. Development Directions and Key Design Technologies Research of Future Large Airliners. Aeronaut. Manuf. Technol 2023, 66, 26–37. [Google Scholar] [CrossRef]
- Jameson, A. Aerodynamic design via control theory. J. Sci. Comput. 1988, 3, 233–260. [Google Scholar] [CrossRef]
- He, P.; Mader, C.A.; Martins, J.R.; Maki, K.J. An aerodynamic design optimization framework using a discrete adjoint approach with OpenFOAM. Comput. Fluids 2018, 168, 285–303. [Google Scholar] [CrossRef]
- Thomas, J.P.; Dowell, E.H. Discrete adjoint approach for nonlinear unsteady aeroelastic design optimization. AIAA J. 2019, 57, 4368–4376. [Google Scholar] [CrossRef]
- Abergo, L.; Morelli, M.; Guardone, A. Aerodynamic shape optimization based on discrete adjoint and RBF. J. Comput. Phys. 2023, 477, 111951. [Google Scholar] [CrossRef]
- Ma, C.; Huang, J.; Li, D.; Deng, J.; Liu, G.; Zhou, L.; Chen, C. Discrete Adjoint Optimization Method for Low-Boom Aircraft Design Using Equivalent Area Distribution. Aerospace 2024, 11, 545. [Google Scholar] [CrossRef]
- Belda, M.; Hyhlík, T. Interactive Airfoil Optimization Using Parsec Parametrization and Adjoint Method. Appl. Sci. 2024, 14, 3495. [Google Scholar] [CrossRef]
- Liu, X.D.; Zhang, P.L.; He, G.H.; Wang, Y.E.; Yang, X.D. Multi-objective aerodynamic optimization of flying wing configuration based on adjoint method. J. Northwestern Polytech. Univ. 2021, 39, 753–760. [Google Scholar] [CrossRef]
- Lei, R.W.; Bai, J.Q.; Xu, D.Y.; Zhang, Y.; Wang, H. Speciality assessment of sequential and concurrent aerostructural optimization based on coupled adjoint technique. J. Aerosp. Power 2019, 34, 1036–1049. [Google Scholar]
- Zhang, W.Q.; Song, M.H.; Wang, H. Exploration on the adjoint aerodynamic optimization of a business jet considering intake and exhaust effects. Flight Dyn. 2022, 40, 8–13. [Google Scholar] [CrossRef]
- Li, M.; Chen, J.J.; Zhou, H.; Cheng, Y.W.; Bai, J.Q. Adjoint-based aero/stealth optimization design for UAV. Acta Aeronaut. Astronaut. Sin. 2024, 45. [Google Scholar]
- Wang, S.Y.; Yang, A. Steady/Unsteady Aerodynamic Optimization Design of Airfoil Based on Discrete Adjoint Method. J. Fudan Univ. (Nat. Sci.) 2024, 63, 209–215. [Google Scholar] [CrossRef]
- Wong, W.S.; Moigne, A.L.; Qin, N. Parallel adjoint-based optimisation of a blended wing body aircraft with shock control bumps. Aeronaut. J. 2007, 111, 165–174. [Google Scholar] [CrossRef]
- Abu-Zurayk, M.; Brezillon, J. Aero-Elastic Multipoint Optimization Using the Coupled Adjoint Approach. In New Results in Numerical and Experimental Fluid Mechanics IX; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Economon, T.D.; Palacios, F.; Copeland, S.R.; Lukaczyk, T.W.; Alonso, J.J. SU2: An open-source suite for multiphysics simulation and design. AIAA J. 2016, 54, 828–846. [Google Scholar] [CrossRef]
- Suder, K. Overview of the NASA environmentally responsible aviation project’s propulsion technology portfolio. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012; p. 4038. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Jameson, A.; Schmidt, W.; Turkel, E. Numerical solution of the Euler equations by finite volume methods using Runge Kutta time stepping schemes. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23 June–25 June 1981; p. 1259. [Google Scholar]
- Sarlak, H.; Mikkelsen, R.; Sarmast, S.; Sørensen, J.N. Aerodynamic behaviour of NREL S826 airfoil at Re = 100,000. J. Phys. Conf. Ser. 2014, 524, 012027. [Google Scholar] [CrossRef]
- Schmitt, V.; Charpin, F. Pressure distributions on the ONERA M6-wing at transonic mach numbers. In Experimental Data Base for Computer Program Assessment; Report of the Fluid Dynamics Panel Working Group 04; AGARD AR-138; NATO: Brussels, Belgium, 1979. [Google Scholar]
- Mani, M.; Ladd, J.; Cain, A.; Bush, R.; Mani, M.; Ladd, J.; Cain, A.; Bush, R. An assessment of one-and two-equation turbulence models for internal and external flows. In Proceedings of the 28th Fluid Dynamics Conference, Snowmass Village, CO, USA, 29 June–2 July 1997; p. 2010. [Google Scholar]
- Martineau, D.; Stokes, S.; Munday, S.; Jackson, A.; Gribben, B.; Verhoeven, N. Anisotropic hybrid mesh generation for industrial RANS applications. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; p. 534. [Google Scholar]
- Sederberg, T.W.; Parry, S.R. Free-form deformation of solid geometric models. In Proceedings of the 13th Annual Conference on Computer Graphics and Interactive Techniques, Dallas, TX, USA, 18–22 August 1986; pp. 151–160. [Google Scholar]
- Anderson, W.K.; Venkatakrishnan, V. Aerodynamic design optimization on unstructured grids with a continuous adjoint formulation. Comput. Fluids 1999, 28, 443–480. [Google Scholar] [CrossRef]
- Nadarajah, S.K.; Jameson, A. Optimum shape design for unsteady flows with time-accurate continuous and discrete adjoint method. AIAA J. 2007, 45, 1478–1491. [Google Scholar] [CrossRef]
- Xiong, J. Aerodynamic Optimization Design Based on Response Surface Methodology; Northwestern Polytechnical University: Xi’an, China, 2006; pp. 232–236. [Google Scholar]
- COAKLEY, T. Numerical simulation of viscous transonic airfoil flows. In Proceedings of the 25th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 24–26 March 1987; p. 416. [Google Scholar]
- Aprovitola, A.; Aurisicchio, F.; Di Nuzzo, P.E.; Pezzella, G.; Viviani, A. Low speed aerodynamic analysis of the N2A hybrid wing–body. Aerospace 2022, 9, 89. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
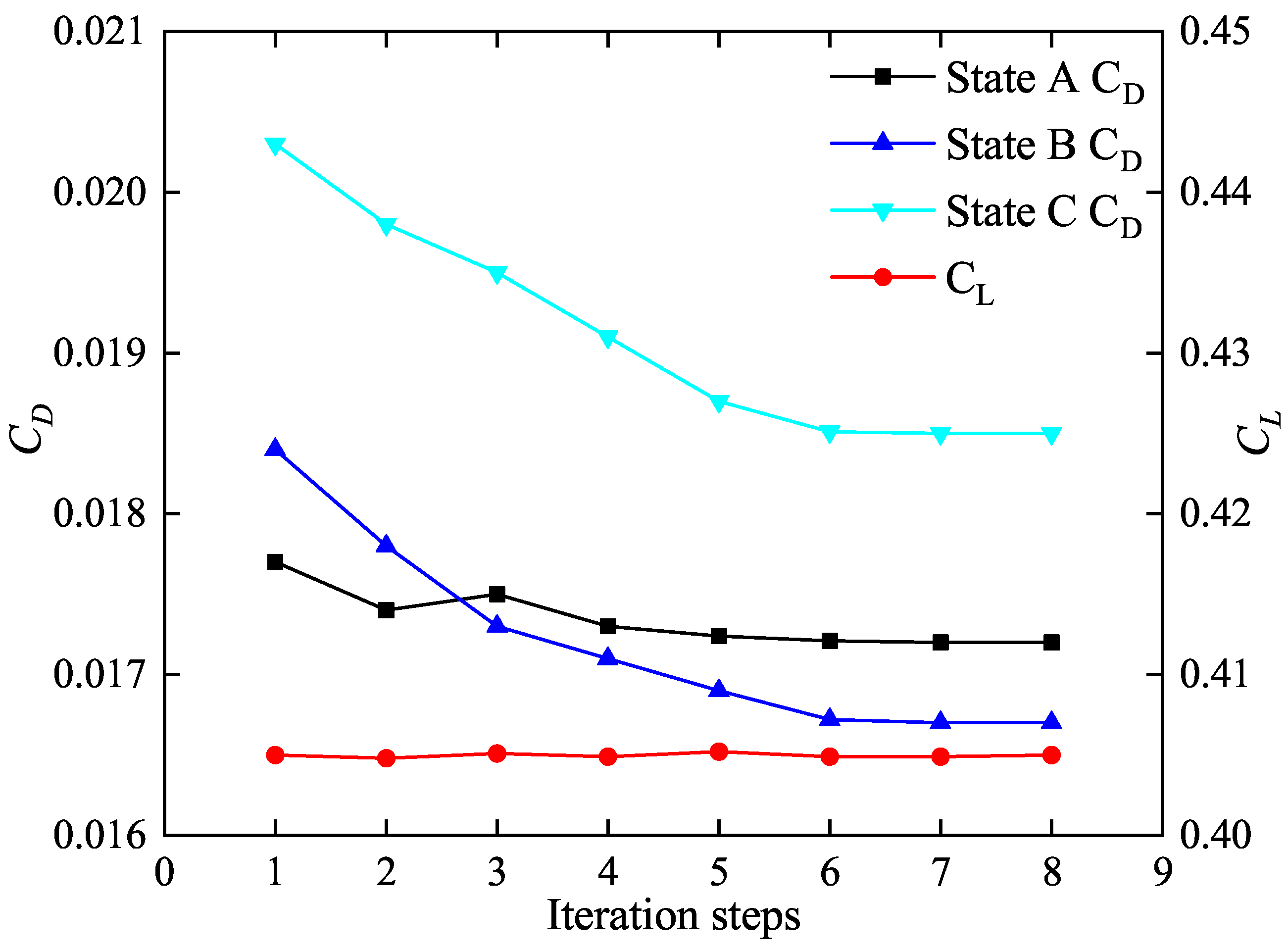
| Design State | Ma | |
|---|---|---|
| A | 0.1 | 0.405 |
| B (Cruise) | 0.2 | 0.405 |
| C | 0.3 | 0.405 |
| Configuration | |||||||
|---|---|---|---|---|---|---|---|
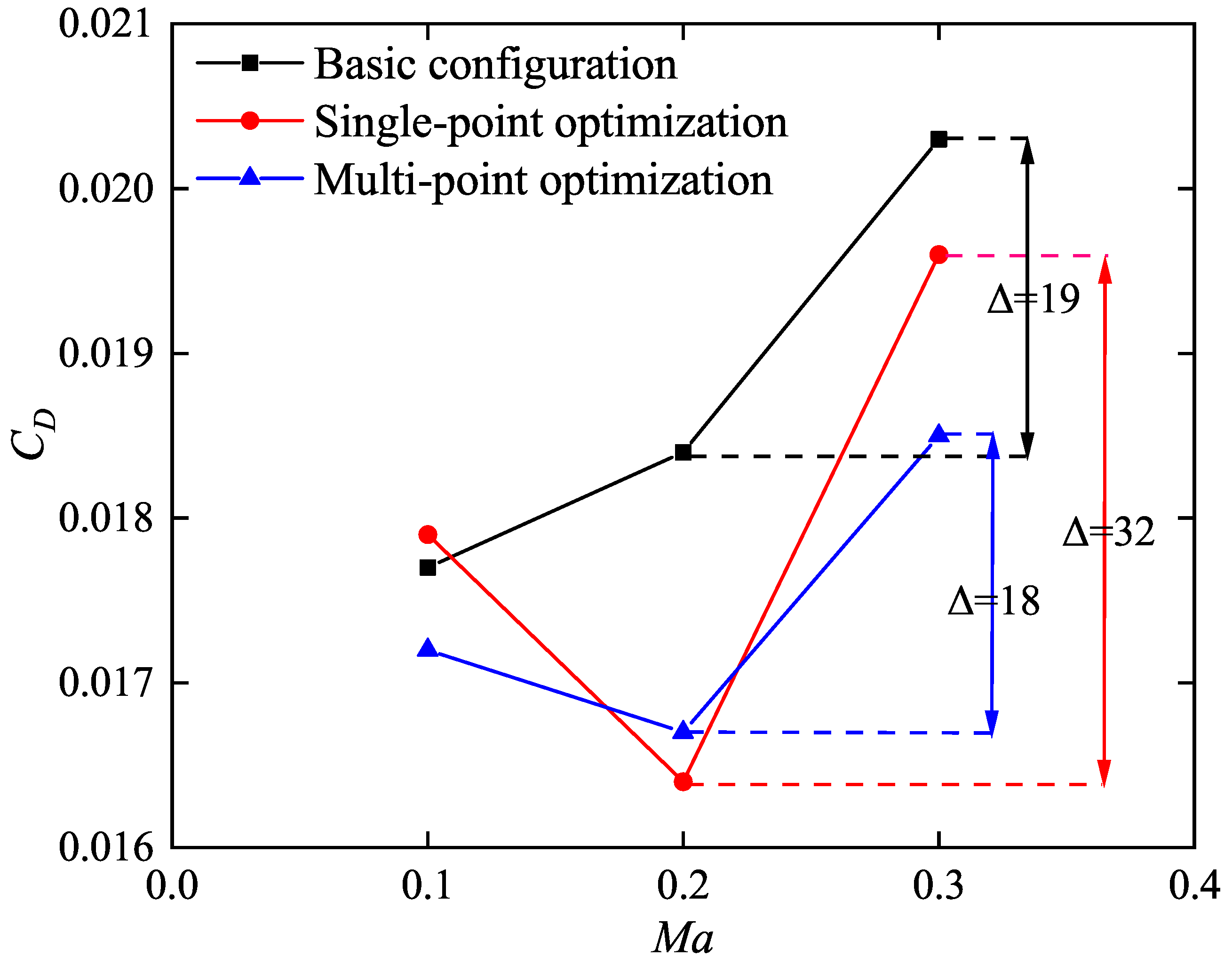
| Basic Configuration | 0.1 | 0.405 | 0.0177 | 22.88 | 35.95 | −0.00854 | 9.31 |
| 0.2 | 0.405 | 0.0184 | 22.01 | 34.59 | −0.00511 | 8.36 | |
| 0.3 | 0.405 | 0.0203 | 19.95 | 31.34 | −0.00493 | 7.41 | |
| Single-Point Optimization | 0.1 | 0.405 | 0.0179 | 22.63 | 35.57 | 0.000629 | 11.76 |
| 0.2 | 0.405 | 0.0164 | 24.70 | 38.82 | −0.000485 | 10.56 | |
| 0.3 | 0.405 | 0.0196 | 20.66 | 32.45 | 0.00427 | 10.26 | |
| Multi-Point Optimization | 0.1 | 0.405 | 0.0172 | 23.55 | 37.01 | 0.00686 | 12.91 |
| 0.2 | 0.405 | 0.0167 | 24.25 | 38.10 | 0.00225 | 12.11 | |
| 0.3 | 0.405 | 0.0185 | 21.89 | 34.41 | −0.00391 | 11.01 |
| Design State | Ma | |
|---|---|---|
| A (Cruise) | 0.2 | 0.405 |
| B | 0.4 | 0.432 |
| C | 0.7 | 0.498 |
| Configuration | |||||||
|---|---|---|---|---|---|---|---|
| Basic Configuration | 0.2 | 0.405 | 0.0184 | 22.01 | 34.59 | −0.00511 | 8.36 |
| 0.4 | 0.432 | 0.0227 | 19.03 | 29.06 | −0.00313 | 6.46 | |
| 0.7 | 0.498 | 0.0261 | 19.08 | 27.05 | −0.00270 | 3.61 | |
| Single-Point Optimization | 0.2 | 0.405 | 0.0164 | 24.70 | 38.82 | −0.000485 | 10.56 |
| 0.4 | 0.432 | 0.0164 | 26.34 | 40.23 | −0.000891 | 8.66 | |
| 0.7 | 0.498 | 0.0244 | 20.41 | 28.93 | −0.000595 | 5.81 | |
| Multi-Point Optimization | 0.2 | 0.405 | 0.0167 | 24.25 | 38.10 | 0.00225 | 12.11 |
| 0.4 | 0.432 | 0.0205 | 21.07 | 32.18 | −0.00216 | 10.21 | |
| 0.7 | 0.498 | 0.0238 | 20.92 | 29.66 | −0.00143 | 7.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Y.; He, J.; Li, Q.; Zhang, B. Multi-Point Optimization Design of Blended Wing Body Based on Discrete Adjoint Method. Aerospace 2025, 12, 404. https://doi.org/10.3390/aerospace12050404
Cui Y, He J, Li Q, Zhang B. Multi-Point Optimization Design of Blended Wing Body Based on Discrete Adjoint Method. Aerospace. 2025; 12(5):404. https://doi.org/10.3390/aerospace12050404
Chicago/Turabian StyleCui, Yuan, Jiandong He, Qiuhong Li, and Bokai Zhang. 2025. "Multi-Point Optimization Design of Blended Wing Body Based on Discrete Adjoint Method" Aerospace 12, no. 5: 404. https://doi.org/10.3390/aerospace12050404
APA StyleCui, Y., He, J., Li, Q., & Zhang, B. (2025). Multi-Point Optimization Design of Blended Wing Body Based on Discrete Adjoint Method. Aerospace, 12(5), 404. https://doi.org/10.3390/aerospace12050404