
A Dynamic Multi-Graph Convolutional Spatial-Temporal Network for Airport Arrival Flow Prediction


Abstract
1. Introduction
- In general, the hourly airport arrival flow prediction highly depends on the flight schedule and observed flight duration. These factors impose different constraints (relationships) on airport pairs forming multiple airport networks (graphs). However, the conventional GCN is designed for a single graph and fails to handle multiple graph structures simultaneously.
- The topology of the airport network is dynamic due to the requirement of real-time ATFM and ever-changing flight interactions among airports. Thus, the airport arrival flow data demonstrate complex and dynamic correlations in spatial and temporal dimensions. However, most existing STGNNs are designed for the static (predetermined) spatial topology of traffic networks. Therefore, these methods fails to explicitly consider the time-evolving property of network structures. How to model the dynamic spatial-temporal dependencies jointly is still challenging.
- To capture the prior operation knowledge and the time-varying airport network, DMGCN is proposed to adaptively merge the graphs into a fused one for obtaining informative spatial representation.
- By combining temporal attention with DMGCN, a novel deep neural network is designed to mine spatial-temporal dependencies of airport arrival flow, considering heterogeneous and dynamic airport networks jointly.
- A real-world dataset is built to evaluate the performance of the proposed approach, covering major airports in China. Compared with other baselines, the experimental results demonstrate that our proposed framework is superior in the multiple-step situational (network-level) AAFP task.
2. Related Work
2.1. Classical Simulation Methods
2.2. Conventional Data-Driven Methods
2.3. Deep Learning Methods
3. Preliminaries and Problem Definition
3.1. Airport Network Definition
3.2. Problem Definition
4. Methodologies
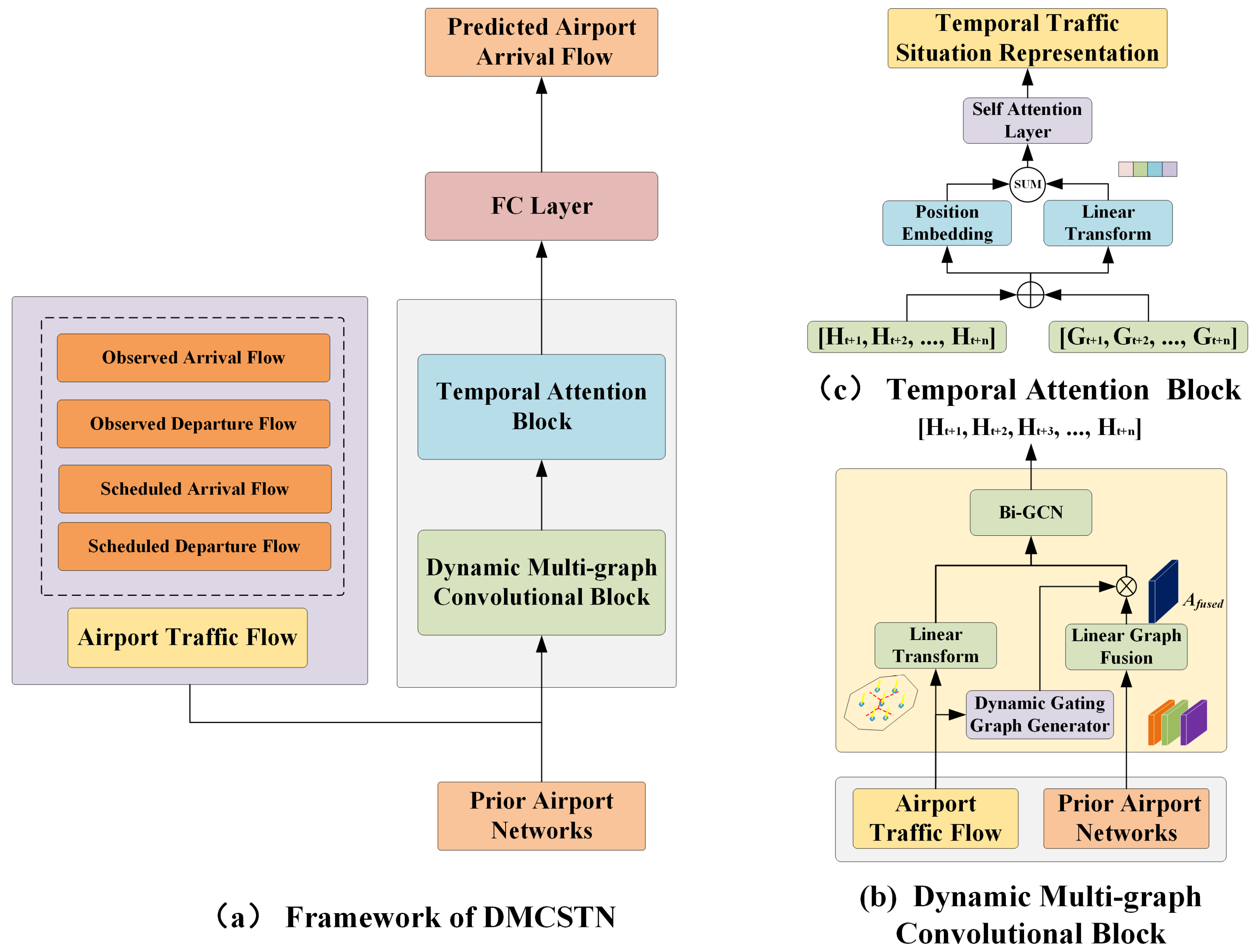
4.1. Overview of the DMCSTN
4.2. Dynamic Multi-Graph Convolutional Network
4.2.1. Dynamic Multi-Graph Fusion
4.2.2. Graph Convolution Operation
4.2.3. Temporal Attention
5. Experiments Preparation
5.1. Data Preparation
5.2. Evaluation Metrics
5.2.1. Experiment Hyperparameters
5.2.2. Baselines
- •
- SAF: Scheduled arrival flow (SAF) is the statistical data from a flight schedule table, which describes the expected arrival flight flow at a given interval.
- •
- HA: It takes the average value of each airport arrival flow by the week as prediction results.
- •
- RF [39]: Random forest (RF) is an ensemble learning method, which combines multiple classifiers to form an effective model.
- •
- GBRT [40]: Gradient boosted regression trees (GBRT) is a flexible non-parametric statistical learning technique for regression.
- •
- VAR [41]: The number of temporal lags is set to four. The input feature is the actual airport arrival flow in the training dataset.
- •
- ARIMA [42]: It fits the historical time series into a parametric model to predict future traffic data.
- •
- SVR [43]: It uses historical data to fit the relationship between the input and output, which is then used to predict future traffic data. Here, we use the linear kernel.
- •
- GAT [44]: It leverages an attention mechanism to capture the useful representation from graph-structured data for downstream prediction tasks without depending on knowing the entire graph structure.
- •
- GRU [45]: It is configured with one layer and 64 hidden units. The initial learning rate is . The model is trained with batch size 32 and loss function MAE.
- •
- ST-GCN [27]: it is utilized to model the spatial-temporal dependencies of traffic flow with a fully convolutional framework.
- •
- Graph WaveNet [28]: Based on a full convolutional architecture, a self-adaptive graph generation method is embedded into Graph WaveNet to complete unknown or incomplete spatial structures for enhancing prediction performance.
6. Experimental Results and Discussion
6.1. Experimental Results
6.2. Effects of Different Spatial Configurations
- DMCSTN_Sem: DMCSTN is configured with only ASG as the spatial topology.
- DMCSTN_Geo: DMCSTN is configured with only ADG as the spatial topology.
- DMCSTN_MGCN: It is a variant of DMCSTN, which is constructed by replacing DMGCN with the Multi-Graph Convolutional Network (MGCN) [38].
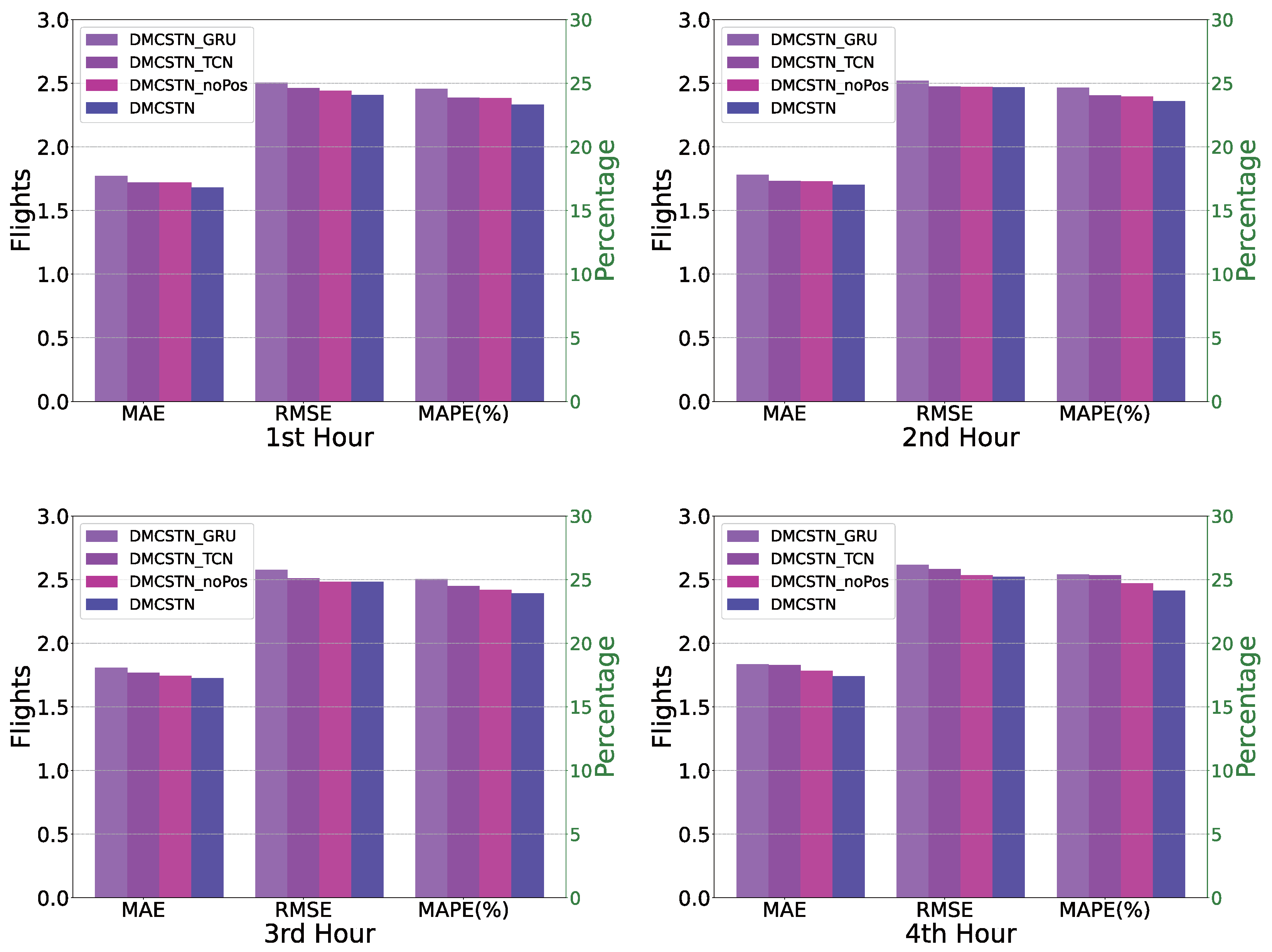
6.3. Effects of Different Temporal Configurations
- DMCSTN_GRU: A variant of DMCSTN is constructed by embedding DMGCN into GRU.
- DMCSTN_TCN: A variant of DMCSTN is built by combing DMGCN with TCN.
- DMCSTN_noPos: A variant of DMCSTN is built by removing the position embedding layer from DMCSTN.
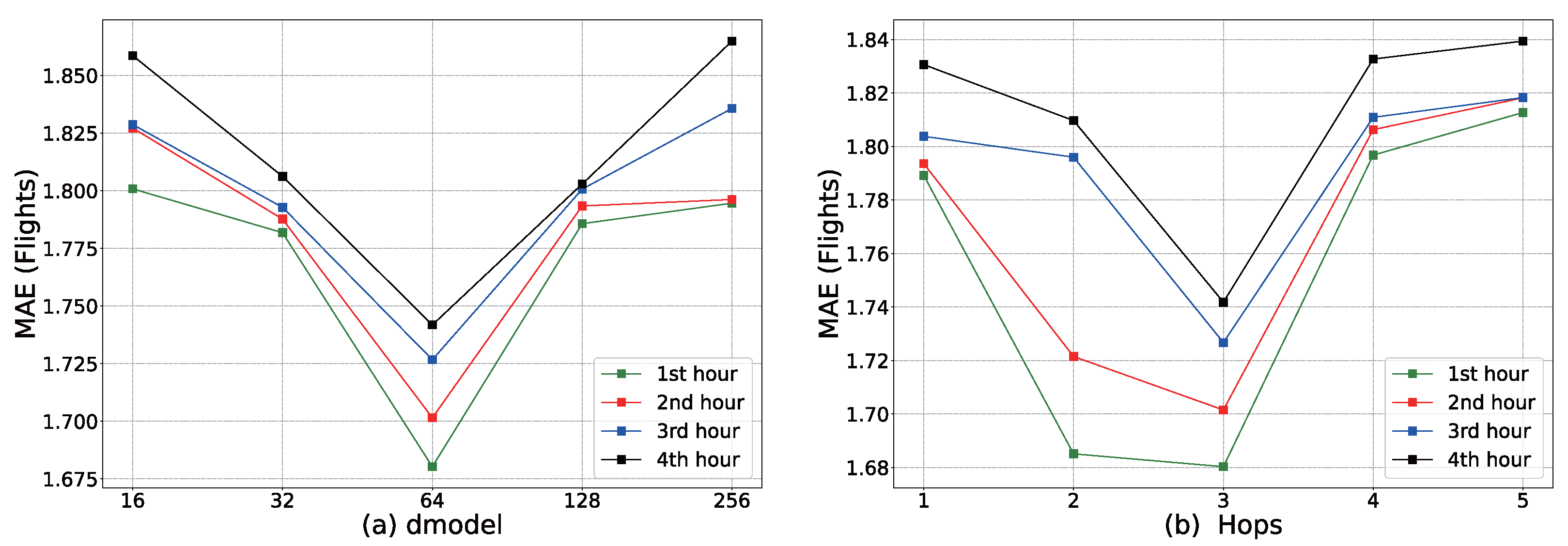
6.4. Effects of Different Model Configurations
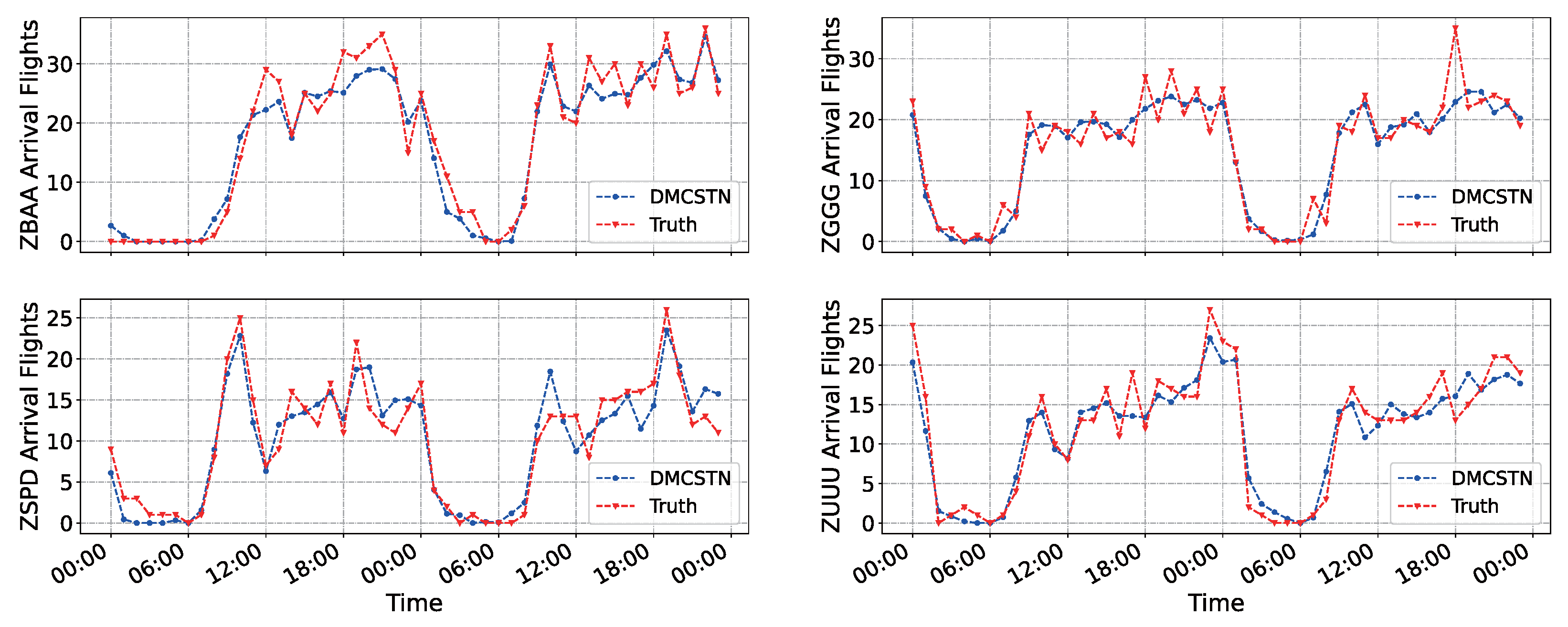
6.5. Case Study
- (1)
- Although the transition patterns of the arrival traffic flow vary among the four airports, the proposed DMCSTN is still capable of capturing the flow trend, especially at the inflection points. It is hypothesized that the capability of extracting prior operation information improves the distinguishability of different airport traffic time-series data.
- (2)
- Focusing on the first 23:00 horizon, the observed arrival flights of ZBAA deviated from the normal level and declined sharply to 15. By tracing the weather calendar, it is found that the thunderstorm disturbed the regular flight operation. However, the predicted results of DMCSTN remain closer to the ground truth. This is because the dynamic gating graph mechanism is capable of learning the throughput which is bound by severe weather.
- (3)
- In summary, the experimental results show that the proposed DMCSTN is more suitable for the AAFP tasks. The performance improvements can be mainly attributed to the combination of DMGCN and TA blocks, which provide superior ability in jointly modeling the complex dynamic dependencies in both spatial and temporal dimensions. These capabilities are particularly valuable in addressing the global airport capacity crunch, where accurate network-level predictions can enhance operational efficiency and mitigate delays in congested regions.
6.6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Civil Aviation Organization. Long-Term Traffic Forecasts—Passenger and Cargo; ICAO: Montreal, QC, Canada, 2018. [Google Scholar]
- International Air Transport Association. IATA Passenger Forecast; IATA: Montreal, QC, Canada, 2017. [Google Scholar]
- 20 European Airports to be Saturated by 2030. Available online: https://centreforaviation.com/analysis/reports/20-european-airports-to-be-saturated-by-2030—eurocontrol-4309 (accessed on 10 November 2022).
- Kim, S.; Park, E. Prediction of flight departure delays caused by weather conditions adopting data-driven approaches. J. Big Data 2024, 11, 11. [Google Scholar] [CrossRef]
- Xue, D.; Wu, L.; Xu, T.; Wu, C.; Wang, Z.; He, Z. Space weather effects on transportation systems: A review of current understanding and future outlook. Space Weather 2024, 22, e2024SW004055. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, H.; Li, F.; Lin, Y. A deep learning approach for short-term airport traffic flow prediction. Aerospace 2022, 9, 11. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, J.w.; Liu, H. An algorithm for trajectory prediction of flight plan based on relative motion between positions. Front. Inf. Technol. Electron. Eng. 2018, 19, 905–916. [Google Scholar] [CrossRef]
- Lin, Y.; Yang, B.; Zhang, J.; Liu, H. Approach for 4-d trajectory management based on hmm and trajectory similarity. J. Mar. Sci. Technol. 2019, 27, 7. [Google Scholar]
- Chen, Z.; Guo, D.; Lin, Y. A deep gaussian process-based flight trajectory prediction approach and its application on conflict detection. Algorithms 2020, 13, 293. [Google Scholar] [CrossRef]
- Sridhar, B.; Soni, T.; Sheth, K.; Chatterji, G. Aggregate flow model for air-traffic management. J. Guid. Control Dyn. 2006, 29, 992–997. [Google Scholar] [CrossRef]
- Sridhar, B.; Chen, N.; Ng, H. An aggregate sector flow model for air traffic demand forecasting. In Proceedings of the 9th AIAA Aviation Technology, Integration, and Operations Conference (ATIO) and Aircraft Noise and Emissions Reduction Symposium (ANERS), Hilton Head, SC, USA, 21–23 September 2009; p. 7129. [Google Scholar]
- Menon, P.K.; Sweriduk, G.D.; Lam, T.; Diaz, G.M.; Bilimoria, K.D.B. Computer-aided eulerian air traffic flow modeling and predictive control. J. Guid. Control Dyn. 2006, 29, 12–19. [Google Scholar] [CrossRef]
- Gilbo, E.; Smith, S. A new model to improve aggregate air traffic demand prediction. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6450. [Google Scholar]
- Chai, S. Hong kong air traffic: Explanation and prediction based on sparse seasonal arima model. arXiv 2021, arXiv:2108.05817. [Google Scholar]
- Xiao, Y.; Ma, Y.; Ding, H. Air traffic flow prediction based on k nearest neighbor regression. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 1265–1269. [Google Scholar]
- Yang, C.H.; Shao, J.C.; Liu, Y.H.; Jou, P.H.; Lin, Y.D. Application of fuzzy-based support vector regression to forecast of international airport freight volumes. Mathematics 2022, 10, 2399. [Google Scholar] [CrossRef]
- Gomez Comendador, V.F.; Arnaldo Valdés, R.M.; Villegas Diaz, M.; Puntero Parla, E.; Zheng, D. Bayesian network modelling of atc complexity metrics for future sesar demand and capacity balance solutions. Entropy 2019, 21, 379. [Google Scholar] [CrossRef] [PubMed]
- Qiu, F.; Li, Y. Air traffic flow of genetic algorithm to optimize wavelet neural network prediction. In Proceedings of the 2014 IEEE 5th International Conference on Software Engineering and Service Science, Beijing, China, 27–29 June 2014; pp. 1162–1165. [Google Scholar]
- Wei, G.; Wang, Z. Short-term airport traffic flow prediction based on lstm recurrent neural network. J. Aeronaut. Astronaut. Aviat. Ser. A 2017, 49, P299–P307. [Google Scholar]
- Yang, Z.; Wang, Y.; Li, J.; Liu, L.; Ma, J.; Zhong, Y. Airport arrival flow prediction considering meteorological factors based on deep-learning methods. Complexity 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Zhang, C.; Li, M.; Wu, D. Federated multidomain learning with graph ensemble autoencoder gmm for emotion recognition. IEEE Trans. Intell. Transp. Syst. 2022, 24, 7631–7641. [Google Scholar] [CrossRef]
- Luo, X.; Zhang, C.; Bai, L. A fixed clustering protocol based on random relay strategy for ehwsn. Digit. Commun. Netw. 2023, 9, 90–100. [Google Scholar] [CrossRef]
- Schlichtkrull, M.; Kipf, T.N.; Bloem, P.; Berg, R.v.d.; Titov, I.; Welling, M. Modeling relational data with graph convolutional networks. In Proceedings of the European Semantic Web Conference, Heraklion, Crete, Greece, 3–7 June 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 593–607. [Google Scholar]
- Guo, S.; Lin, Y.; Wan, H.; Li, X.; Cong, G. Learning dynamics and heterogeneity of spatial-temporal graph data for traffic forecasting. IEEE Trans. Knowl. Data Eng. 2022, 34, 5415–5428. [Google Scholar] [CrossRef]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting. In Proceedings of the Conference on ICLR, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-gcn: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858. [Google Scholar] [CrossRef]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. In Proceedings of the Conference on IJCAI, Stockholm, Sweden, 13–19 July 2018; pp. 3634–3640. [Google Scholar]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Zhang, C. Graph wavenet for deep spatial-temporal graph modeling. In Proceedings of the IJCAI, Macao, China, 10–16 August 2019; pp. 1907–1913. [Google Scholar]
- Zhang, Y.; Xu, S.M.; Zhang, L.H.; Jiang, W.W.; Alam, S.; Xue, D. Short-term multi-step-ahead sector-based traffic flow prediction based on the attention-enhanced graph convolutional LSTM network (AGC-LSTM). Neural Comput. Applic. 2024. [Google Scholar] [CrossRef]
- Cheng, T.; Cui, D.; Cheng, P. Data mining for air traffic flow forecasting: A hybrid model of neural network and statistical analysis. In Proceedings of the 2003 IEEE International Conference on Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; Volume 1, pp. 211–215. [Google Scholar]
- Zeng, Y.; Hu, M.; Chen, H.; Yuan, L.; Alam, S.; Xue, D. Improved air traffic flow prediction in terminal areas using a multimodal spatial–temporal network for weather-aware (MST-WA) model. Adv. Eng. Inform. 2024, 62, 102935. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, H.; Wu, Y.; Lin, Y. A multi-view attention-based spatial–temporal network for airport arrival flow prediction. Transp. Res. Part E Logist. Transp. Rev. 2023, 170, 102997. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, J.w.; Liu, H. Deep learning based short-term air traffic flow prediction considering temporal–spatial correlation. Aerosp. Sci. Technol. 2019, 93, 105113. [Google Scholar] [CrossRef]
- Cui, Z.; Lin, L.; Pu, Z.; Wang, Y. Graph markov network for traffic forecasting with missing data. Transp. Res. Part C Emerg. Technol. 2020, 117, 102671. [Google Scholar] [CrossRef]
- Du, W.B.; Chen, S.W.; Li, Z.S.; Cao, X.B.; Lv, Y.S. A spatial-temporal approach for multi-airport traffic flow prediction through causality graphs. IEEE Trans. Intell. Transp. Syst. 2024, 25, 532–544. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, H.Y.; Guo, D.Y.; Lin, Y. Improving airport arrival flow prediction considering heterogeneous and dynamic network dependencies. Inf. Fusion 2023, 100, 101924. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Chai, D.; Wang, L.; Yang, Q. Bike flow prediction with multi-graph convolutional networks. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle WA, USA, 6–9 November 2018; pp. 397–400. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Friedman, J. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2000, 29, 1189–1232. [Google Scholar] [CrossRef]
- Zivot, E.; Wang, J. Vector autoregressive models for multivariate time series. In Modeling Financial Time Series with S-PLUS®; 2006; pp. 385–429. Available online: https://www.researchgate.net/publication/312754922_Vector_Autoregressive_Models_for_Multivariate_Time_Series (accessed on 26 July 2024).
- Ahmed, M.S.; Cook, A.R. Analysis of Freeway Traffic Time-Series Data by Using Box-Jenkins Techniques; No. 722. 1979. Available online: https://onlinepubs.trb.org/Onlinepubs/trr/1979/722/722-001.pdf (accessed on 26 July 2024).
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef]
- Velickovic, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph attention networks. Stat 2017, 1050, 20. [Google Scholar]
- Cho, K.; van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. In Proceedings of the SSST-8, Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation, Doha, Qatar, 25 October 2014. [Google Scholar]
- Xue, D.; Du, S.; Wang, B.; Shang, W.L.; Avogadro, N.; Ochieng, W.Y. Low-carbon benefits of aircraft adopting continuous descent operations. Appl. Energy 2025, 383, 125390. [Google Scholar] [CrossRef]
- Santos, R.M.; Murça, M.C. Airport capacity prediction and optimal allocation for Strategic Air Traffic Flow Management at Sao Paulo/Guarulhos International Airport. Case Stud. Transp. Policy 2025, 20, 101414. [Google Scholar] [CrossRef]
- Tang, X.W.; Ye, M.F.; Wu, J.Q.; Zhang, S.R. Two stages of arrival aircraft: Influencing factors and prediction of integrated arrival time. Aerospace 2025, 12, 250. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Number | Aircraft Type | Day of Week | Departure | Departure Time | Arrival Time | Arrival |
|---|---|---|---|---|---|---|
| 8L9938 | 737 | 246 | ZBAA | 0740 | 1200 | ZPMS |
| 3U8896 | 320 | 1234567 | ZBAA | 0625 | 0935 | ZUUU |
| CA1592 | 320 | 346 | ZSYN | 1245 | 1440 | ZBAA |
| CA1593 | 738 | 14567 | ZBAA | 2015 | 2145 | ZSYT |
| Serial Number | DEP | DES | Number |
|---|---|---|---|
| 1 | ZBAA | ZUUU | 220 |
| 2 | ZGGG | ZSSS | 223 |
| 3 | ZBAA | ZSHC | 154 |
| Methods | 1st Hour | 2nd Hour | 3rd Hour | 4th Hour | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MAPE (%) | RMSE | MAE | MAPE (%) | RMSE | MAE | MAPE (%) | RMSE | MAE | MAPE (%) | RMSE | |
| SAF | 2.431 | 34.4 | 3.516 | 2.431 | 34.4 | 3.516 | 2.431 | 34.4 | 3.516 | 2.431 | 34.4 | 3.516 |
| HA | 1.922 | 26.9 | 2.532 | 1.922 | 26.9 | 2.532 | 1.922 | 26.9 | 2.532 | 1.922 | 26.9 | 2.532 |
| VAR | 1.836 | 25.7 | 2.523 | 1.970 | 27.6 | 2.705 | 2.034 | 28.5 | 2.784 | 2.084 | 29.2 | 2.852 |
| SVR | 2.862 | 39.4 | 3.887 | 3.082 | 44.5 | 4.362 | 3.158 | 44.0 | 4.474 | 3.192 | 46.4 | 4.418 |
| ARIMA | 3.202 | 43.2 | 4.717 | 3.982 | 56.8 | 6.142 | 4.021 | 56.8 | 6.113 | 4.775 | 65.4 | 6.639 |
| GBRT | 5.421 | 76.9 | 7.782 | 5.423 | 76.9 | 7.785 | 5.521 | 77.9 | 8.081 | 5.905 | 78.1 | 8.447 |
| RF | 2.420 | 33.7 | 3.243 | 2.504 | 34.8 | 3.453 | 2.571 | 35.8 | 3.611 | 2.889 | 39.5 | 3.891 |
| GRU | 1.748 | 24.2 | 2.427 | 1.767 | 24.4 | 2.461 | 1.826 | 25.3 | 2.525 | 1.861 | 25.7 | 2.575 |
| GAT | 2.136 | 29.6 | 3.016 | 2.150 | 29.9 | 3.044 | 2.193 | 30.4 | 3.108 | 2.459 | 35.1 | 3.527 |
| ST-GCN | 1.767 | 24.5 | 2.499 | 1.768 | 24.5 | 2.501 | 1.990 | 27.6 | 2.767 | 2.007 | 27.9 | 2.774 |
| Graph waveNet | 1.731 | 24.2 | 2.467 | 1.756 | 24.3 | 2.494 | 1.784 | 24.7 | 2.548 | 1.795 | 24.9 | 2.577 |
| DMCSTN | 1.680 | 23.3 | 2.441 | 1.702 | 23.6 | 2.469 | 1.727 | 23.9 | 2.509 | 1.742 | 24.1 | 2.522 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Yang, H.; Yan, Z. A Dynamic Multi-Graph Convolutional Spatial-Temporal Network for Airport Arrival Flow Prediction. Aerospace 2025, 12, 395. https://doi.org/10.3390/aerospace12050395
Huang Y, Yang H, Yan Z. A Dynamic Multi-Graph Convolutional Spatial-Temporal Network for Airport Arrival Flow Prediction. Aerospace. 2025; 12(5):395. https://doi.org/10.3390/aerospace12050395
Chicago/Turabian StyleHuang, Yunyang, Hongyu Yang, and Zhen Yan. 2025. "A Dynamic Multi-Graph Convolutional Spatial-Temporal Network for Airport Arrival Flow Prediction" Aerospace 12, no. 5: 395. https://doi.org/10.3390/aerospace12050395
APA StyleHuang, Y., Yang, H., & Yan, Z. (2025). A Dynamic Multi-Graph Convolutional Spatial-Temporal Network for Airport Arrival Flow Prediction. Aerospace, 12(5), 395. https://doi.org/10.3390/aerospace12050395