3.1. Preliminary Knowledge
The morphing aircraft system consists of a fuselage and two wings, with the primary distinction being their structural rigidity. As the fuselage, equipped with six fins, is not prone to deformation, the fuselage is modeled as a rigid body capable of translational motion and rotational motion in space. In contrast, the wings, which account for almost 5% of the total aircraft mass, are regarded as straight beams [
18] undergoing small elastic deformations and large overall motions following the fuselage, including variable-sweep rotations. Based on these characteristics, the morphing aircraft is modeled as a rigid–elastic coupling system integrating flight dynamics and structural dynamics.
- (1)
Generalized Speeds
To describe aircraft motion, the American Coordinate System (ACS) for aircraft [
19] is adopted, incorporating three coordinate frames in
Figure 2: Earth-Fixed Coordinate System denoted by {I} (marked in red), Body-Fixed Coordinate System denoted by {B} (marked in cyan), and Velocity Coordinate System denoted by {V} (marked in green).
To describe translational motion, the position vector from the origin of {I} to O
F is denoted by
, while the velocity vector of the aircraft in {B} is
. Aircraft rotations are described using Euler angles
between {I} and {B}, with the angular rate vector
in {B}. Their mathematical expressions are given as
where
,
, and
denote the roll, pitch, and yaw angles, respectively.
To describe variable-sweep rotations of the left and right wings, the sweep angles of the two wings are denoted as and , with the morphing rates denoted as and .
Elastic deformations are described using and as mode coordinates for neutral deformations of left and right beams and and as mode coordinates for lateral deformations of left and right beams. Then, their corresponding deformation rates are , and .
To fully describe the system dynamics, are defined as twelve generalized coordinates, and as twelve generalized speeds.
- (2)
Aircraft Kinematical Equations
Aircraft kinematics [
20] and variable-sweep rotations can be described as follows:
where
,
, and
.
- (3)
Partial Angular Velocities
According to
in (3), twelve partial angular velocities of B
F are given by
According to
, twelve partial angular velocities of B
R are obtained.
According to
, twelve partial angular velocities of B
L are obtained.
- (4)
Partial Velocities
According to
in (2), twelve partial velocities of B
F are given by
To obtain partial velocities of B
R, we define
as the absolute velocity vector below and then perform the discrete processing of elastic deformations.
where the COM of B
R is located at
after elastic deformations.
denotes the elastic deformation vector from O
R to
, and it is expressed as
.
u1 denotes the axial deformation displacement of B
R.
u2 and
u3 are the lateral deformation displacements of B
R.
denotes the position vector from O
F to O
2.
denotes the position vector from O
2 to O
R.
is the position vector and it is expressed as
.
Next, the assumed mode method in [
18] is employed to perform the discrete processing of elastic deformations. The results are given by
where
and
are the vibration mode functions of B
R.
denotes the modal integration expressed as
.
According to (9) and (10), twelve partial velocities of B
R are given by
where
and
.
Similarly,
is defined as the absolute velocity vector of B
L. Then, the assumed mode method in [
18] is employed for the discrete processing of elastic deformations. The results are given by
where
and
are the vibration mode functions of B
L.
denotes the modal integration expressed as
.
According to
and (12), twelve partial velocities of B
L are given by
where
and
.
To enhance readability when applying Kane’s method,
Table 7 defines the forces and moments contributing to the generalized forces of the coupled system. The generalized forces acting on the fuselage drive translational and rotational motions without introducing uncertainties, whereas those acting on the wings induce variable-sweep rotations, elastic vibrations, and associated uncertainties.
3.2. Generalized Inertia Forces
The inertia force and inertia torque of B
F can be described as
where
is the COM acceleration of B
F, and it is expressed as
.
Considering (5), (8), (14) and (15), the contribution of B
F to the aircraft’s generalized inertial force is given by
The inertia force and inertia torque of B
R can be described as
where
denotes the COM acceleration of B
R, and it is expressed as
.
Considering (6), (11), (17) and (18), the contribution of B
R to the aircraft’s generalized inertial force is given by
Similarly,
is defined as the COM acceleration of B
L, and it is expressed as
. Then, the inertia force and inertia torque of B
L can be obtained.
Considering (7), (13), (20) and (21), the contribution of B
L to the aircraft’s generalized inertial force is given by
Considering (16), (19) and (22), the aircraft’s generalized inertial force is given by
3.3. Generalized Active Forces
The aerodynamic force on each part is expressed in {V}, while the engine thrust and gravity are expressed in {B} and {I}, below. Then, we obtain
Aerodynamic moments and motor torque are all expressed in {B}. Then, we obtain
Considering (24) and (25), the active force and the active moment on B
F are given by
Based on (5), (8) and (26), the contribution of B
F to the aircraft’s generalized active force is given by
Considering (24) and (25), the active force and the active moment on B
R are given by
Based on (6), (11) and (28), the contribution of B
R to the aircraft’s generalized active force is given by
Similarly, considering (24) and (25), the active force and the active moment on B
L are given by
Based on (7), (13) and (30), the contribution of B
L to the aircraft’s generalized active force is given by
Considering (27), (29) and (31), the aircraft’s generalized active force is given by
3.5. Rigid–Elastic Coupling Dynamics
Using the twelve generalized coordinates and speeds in
Section 3.1, the twelve partial angular velocities and twelve partial velocities for each component of the variable-sweep aircraft are derived. By incorporating generalized inertial forces in
Section 3.2, generalized active forces in
Section 3.3, and generalized internal forces in
Section 3.4, the twelve Kane dynamic equations, describing flight dynamics and structural dynamics, are obtained as
Assuming symmetric and uniform wings (, ), the rigid–elastic coupling dynamic model of the variable-sweep aircraft is established from (40)–(46), where , , , and are defined to facilitate the equation’s expression. The state variables of the Kane dynamic equations consist of the twelve generalized speeds. However, the state variables of the kinematic equations consist of the twelve generalized coordinates.
The eight flight dynamics in Equation (40) consist of translation, rotation, and variable-sweep rotation dynamics. The eight flight kinematics in Equation (41) describe translation, rotation, and variable-sweep kinematics.
Furthermore, the four structural dynamics in Equations (42)–(45) govern the elastic deformations of the two beams, and the four kinematics equations of elastic vibrations (46) describe the deformation rates.
In addition, the coupling terms (40) represent model uncertainties arising from two primary sources:
- (1)
Variable-sweep rotations (marked with _) are expressed in (47) and (49), distinguishing these uncertainties from traditional rigid-body dynamics.
- (2)
Elastic deformations (marked with _) are expressed in (48) and (50), differentiating their uncertainties from conventional multibody dynamics.
where
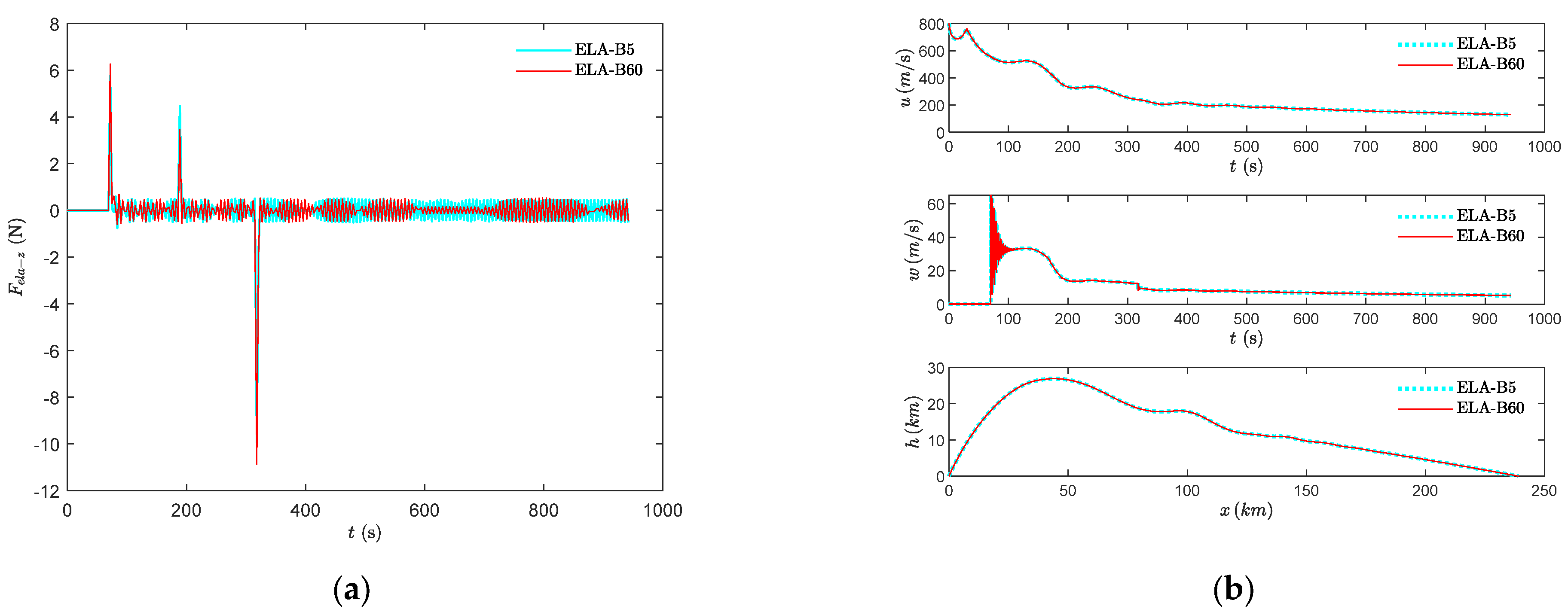
denote additional morphing forces.
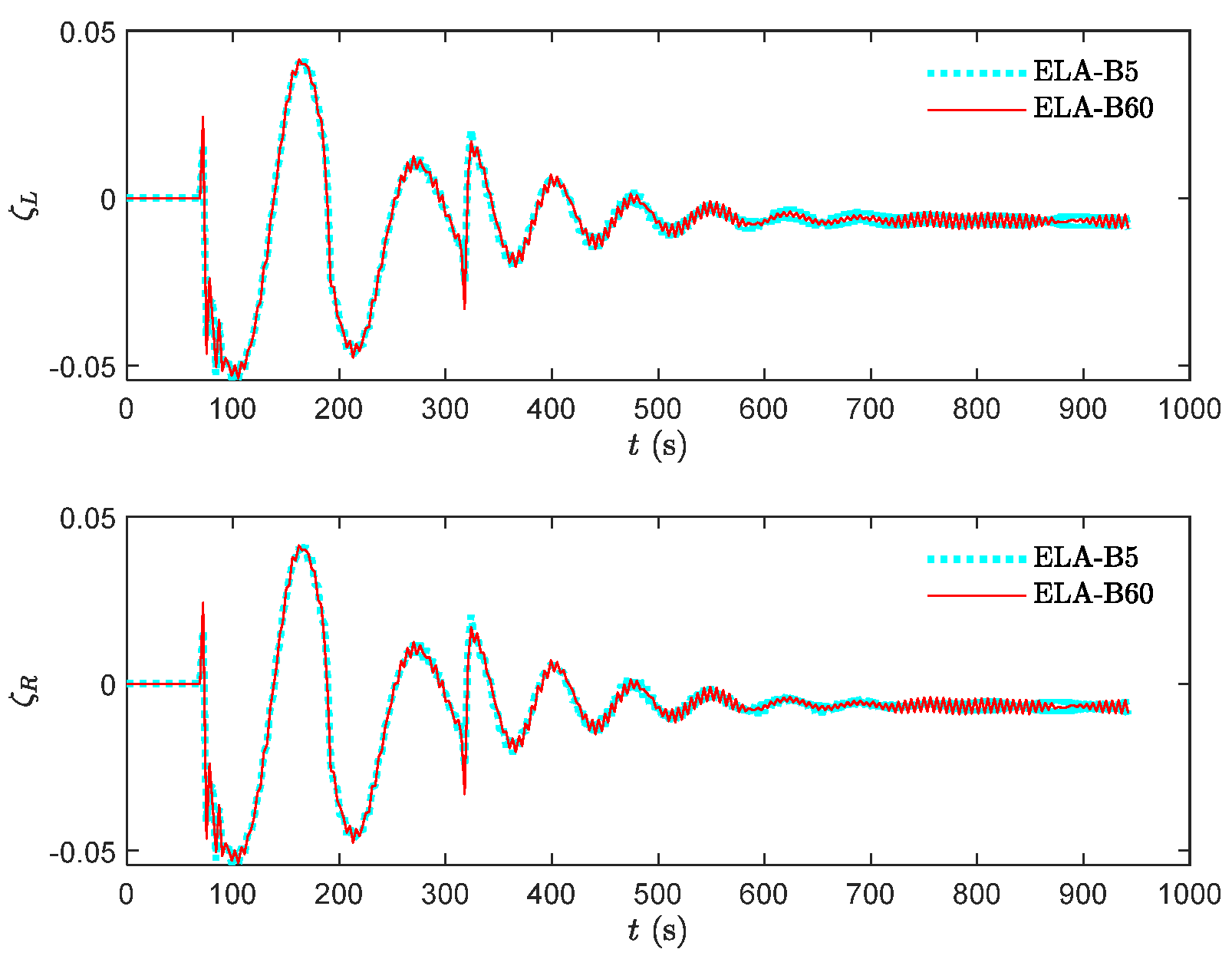
denote additional elastic forces.
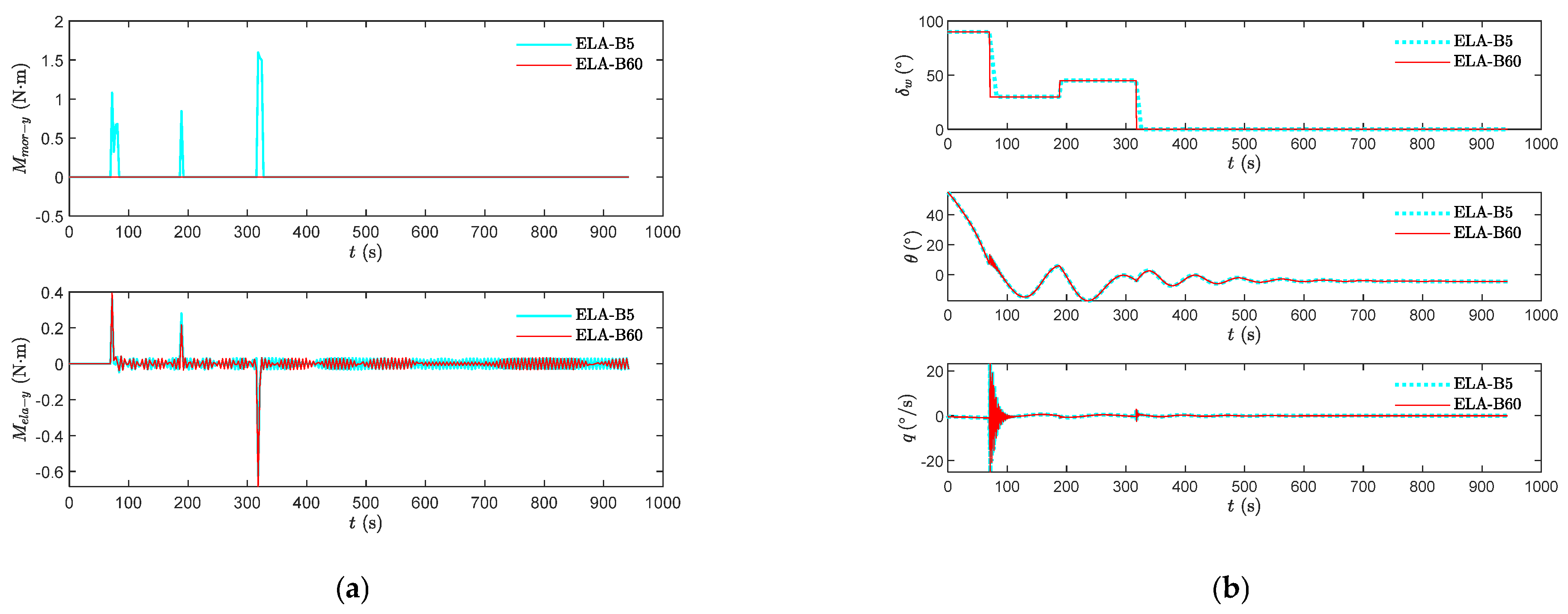
denote additional morphing moments.
denote additional elastic moments.
The complexity of the proposed rigid–elastic coupling dynamic model arises from the intricate interaction between rigid-body dynamics, variable-sweep rotations, and elastic deformations, all of which introduce model uncertainties. The wings undergoing variable-sweep rotations generate additional morphing force and additional morphing moment in (40), while the wings undergoing elastic deformations generate additional elastic force and additional elastic moment in (40).
In (40),
are model uncertainties due to variable-sweep rotations of the two wings. This morphing process alters their COM positions and inertia forces. There are derivative relationships between the position vector, velocity vector, and acceleration vector. According to (9), variations in the COM position lead to additional COM velocities and accelerations. As derived in (17), these extra COM accelerations further contribute to additional inertia forces. Consequently, the variations in the COM position of the two wings contribute to the aircraft’s generalized inertia forces, as shown in (19). In addition, the large-scale variations in aerodynamic forces caused by variable-sweep configurations change aircraft translations.
are expressed as
In (40),
are model uncertainties caused by the elastic deformations of the two wings. The elastic deformations alter their deformation displacements of COM, inertia forces, and internal forces. As shown in (9), both axial and lateral deformations induce extra deformation velocities and accelerations. According to (17), extra deformation accelerations develop extra inertia force. According to (19), the elastic deformations of the two wings contribute to the aircraft’s generalized inertia forces. In addition, the small elastic deformations contribute to the aircraft’s generalized internal forces according to (34). These factors will trigger elastic vibrations and alter the translational motions of the aircraft.
are expressed as
In (40),
are model uncertainties caused by the variable-sweep rotations of the two wings, which alter their inertia torques. According to (18), variable-sweep rotations develop additional inertia torque. Therefore, the variable-sweep rotations contribute to the aircraft’s generalized inertia forces according to (19). In addition, the large-scale variations in aerodynamic moments caused by variable-sweep configurations will alter aircraft rotations.
are expressed as
In (40),
are model uncertainties caused by elastic deformations, which alter their deformation displacements of COM, inertia forces, and internal forces. According to (9), both axial and lateral deformation displacements develop additional deformation velocities and accelerations. According to (17), extra deformation accelerations develop extra inertia force. Therefore, the elastic deformations of the two wings contribute to aircraft’s generalized inertia forces according to (19). In addition, small elastic deformations contribute to the aircraft’s generalized internal forces according to (34). Those factors will trigger elastic vibrations in the two wings and alter the rotational motions of the aircraft.
are expressed as






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}