1. Introduction
In recent years, the use of unmanned aerial vehicles (UAVs) has expanded across various fields, including agriculture, observation, and transportation. UAVs can be categorized as fixed-wing UAVs or rotary-wing UAVs. Compared to rotary-wing UAVs, fixed-wing UAVs have a larger payload and higher cruising speed, making them suitable for long-distance missions. However, they require a flat and sufficiently long enough runway within an open environment for landing. Therefore, increasing the speed of fixed-wing UAVs, which leads to an increase in the landing distance, limits their applicability to missions. Conversely, for expanding their applicability to missions, enabling UAVs to fly at even faster speeds is essential. Thus, it is important to improve the short-distance landing performance of fixed-wing UAVs over the entire landing path.
Research and development broadly aim to improve short-distance landing performance through changing the fuselage shape, wing shape, and propulsion system. Different from conventional fixed-wing airplanes, VTOL airplanes have been designed with different propeller arrangements, including tilt-rotors that have the features of both helicopters and fixed-wing airplanes [
1]. These endow such airplanes with the capability of hovering and vertical landing, so they do not require space for takeoff and landing. A study on the prediction of takeoff and landing distances demonstrated that using channel wings on airplanes improves the STOL performance [
2], and STOL exhaust systems have been studied as a replacement for tiltrotors [
3]. A parachute recovery system [
4] has been researched as a method for which a runway is not required. However, these techniques require significant hardware changes, which are not realistic for conventional fixed-wing UAVs. In addition, the increased weight leads to decreases in the payload, as well as the cruising range and speed. Therefore, this research focuses on developing a method for determining the landing trajectory that allows for conventional fixed-wing unmanned aerial vehicles to achieve short-distance landing without the need for additional equipment.
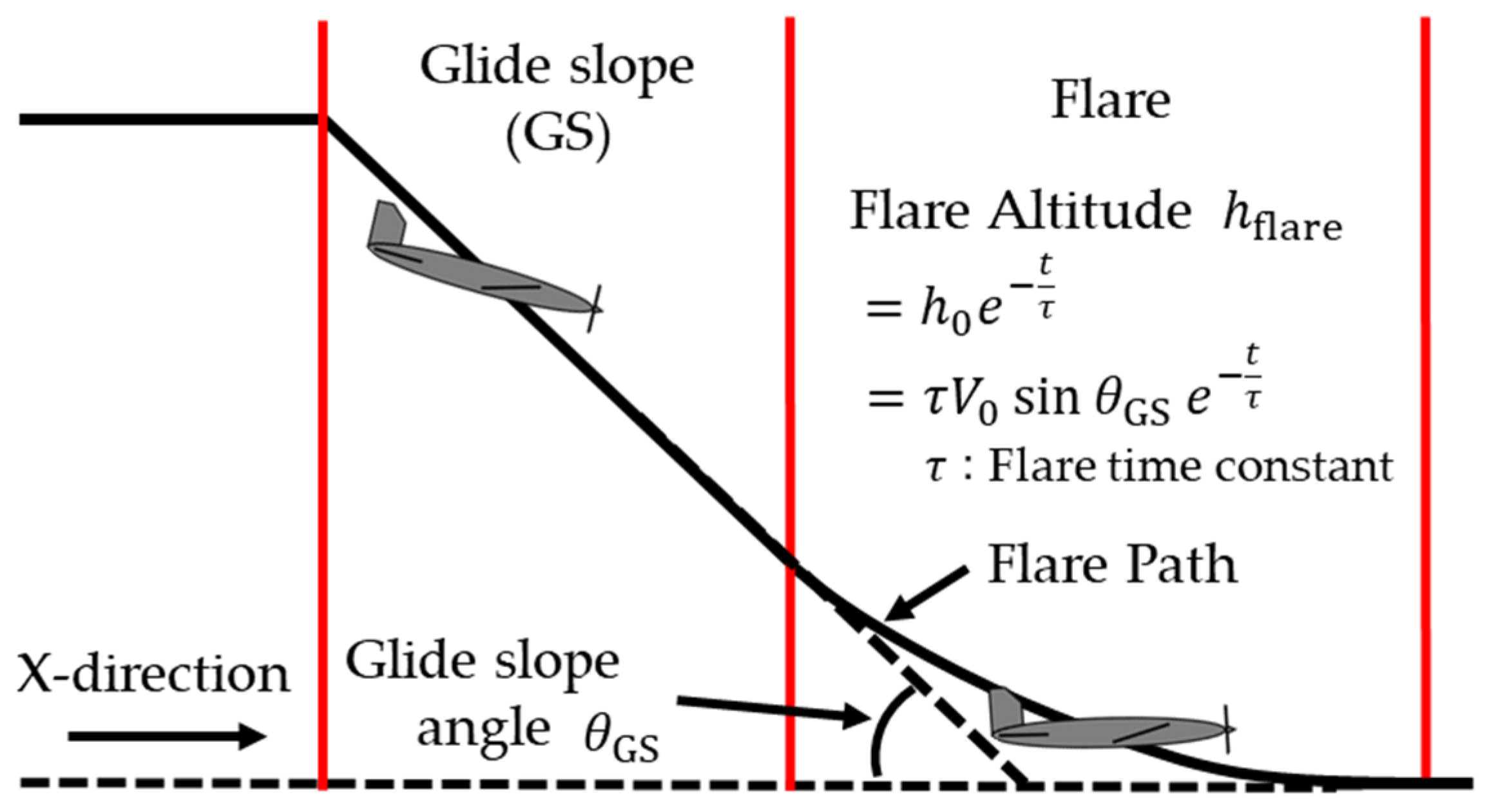
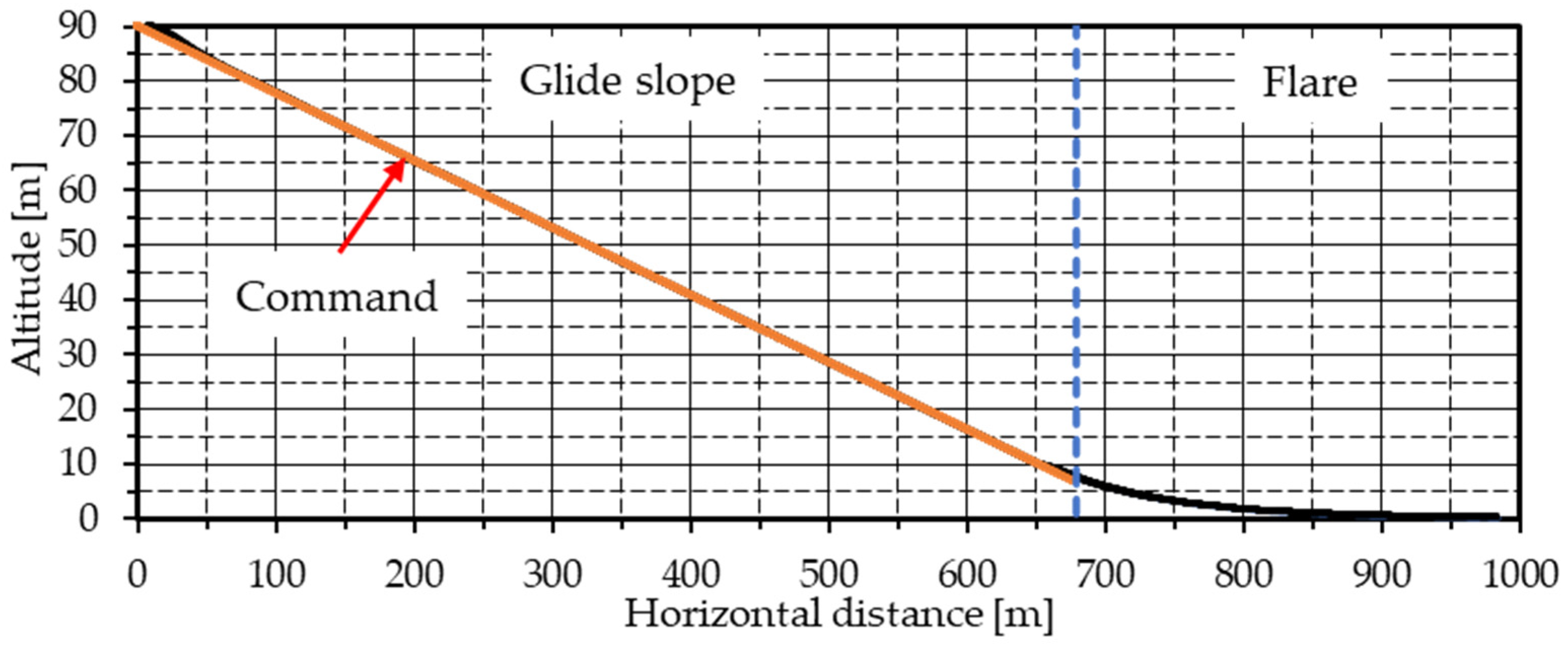
A typical landing trajectory consists of a glide slope phase, in which the airplane descends at a constant glide slope angle and airspeed, and a flare phase, in which the nose is raised to reduce the descent speed, as shown in
Figure 1. The flight path of the glide slope phase is determined by the glide slope angle. Thus, the horizontal distance of the glide slope phase can be effectively shortened by increasing the glide slope angle. This approach has been well established in previous research [
5,
6]. Specifically, one study presents a method for calculating the maximum glide slope angle, which is determined by the stall angle of attack, using the equilibrium equation of longitudinal motion [
5]. Another study presents the design and development of an autonomous flight technique for a landing trajectory that was set based on the policy of descending at the maximum glide slope angle while suppressing the forward speed [
6]. All of these studies dealt with the glide slope trajectory.
The flight path during the flare phase follows an exponential function, where a greater flight path curvature results in a shorter horizontal distance during the flare phase. The parameter dominating this curvature is the flare time constant. Generally, the flare time constant is determined based on the distance between the transmitter point and the touchdown point. The method involves using an exponential function, its derivative, the glide slope angle, and the distance [
7,
8,
9]. To our best knowledge, there are few studies that focus on short-distance landing during the flare phase. In [
5], however, the focus is on short-distance landing, where a method is proposed for determining the minimum flare time constant by deriving the static relationship between the angle of attack and the flare time constant at the start of the flare phase from the equations of motion for a point mass restricted to the longitudinal plane. It is then analytically demonstrated that the flare time constant is minimum at the maximum angle of attack, in terms of airplane performance. In essence, this method uses the relationship between the angle of attack and the flare time constant at the start of the flare phase, which is derived from the equations of motion of a point mass restricted to the longitudinal plane. However, it is not necessarily the case that the maximum angle of attack, nor a value close to it, is reached at the start of the flare. In addition, it is impossible to incorporate the equation of rotational motion using the conventional method for determining the minimum flare time constant, so it is not incorporated. Therefore, in many cases, it is highly likely that an unrealizable flare time constant will be determined as a result of not meeting the assumptions of the conventional method.
In consideration of the above, in this study, we propose a new method for determining the flare time constant in which the horizontal distance of the flare phase is minimized, with the aim of reducing the aerial distance of fixed-wing UAVs. The landing distance in the flare phase is proportional to the flight speed. So, the higher the speed of the UAV, the longer the landing distance. Therefore, it is important to develop short-distance landing control techniques for high-speed UAVs that are applicable during the flare phase. Essentially, this method requires solving a nonlinear optimization problem for equations of motion, both for translational motion in the XZ plane and for rotational motion around the Y-axis under the initial conditions and terminal conditions as equality constraints. Unlike the conventional method for determining flare time constants, this method takes into account the pitch angular velocity generated by the rotational motion during the flare phase and attitude at the start of the flare phase, which cannot be considered in the conventional point mass model, by including the rotational motion. Therefore, the proposed method strictly takes into account the characteristics of the UAV and can be applied to a wide range of UAVs. In this paper, first, in
Section 2, we explain both the formulation of the optimal control problem for determining the flare time constant and the numerical solution method used. In
Section 3, we present the calculation results when the method shown in
Section 2 is applied to the target UAV. In addition, we simulate a longitudinal flight to confirm both the validity of the motion model equation presented in
Section 2 and the accuracy of the optimal solution, and we describe the results. In
Section 4, we conduct a six-degrees-of-freedom flight simulation that includes sensor noise and wind disturbance to confirm whether it is possible to achieve landing control using the optimized flare time constant obtained and describe the simulation results. Finally, in
Section 5, we conclude this paper.
3. Method Application
The method explained in
Section 2 is applied to the target airplane shown in
Section 3.1. The initial and terminal conditions, thrust values, inequality constraints, and weight coefficients for the evaluation function are described in
Section 3.2. The nonlinear optimization problem is solved using the conditions shown in
Section 3.2, and the calculation results, including the flare time constant, are described in
Section 3.3. The accuracy of the optimal solution obtained in
Section 3.3 and the validity of the motion model used in the nonlinear optimization problem are confirmed in
Section 3.4.
3.1. Target UAV
The validity of the method was confirmed using the target UAV model shown in
Figure 3. This target UAV includes a propeller engine and is a low-wing, front-wheel-drive UAV equipped with a guidance control circuit and various sensors (air data sensor (ADS), inertial navigation system (INS), and pressure altitude sensor). The specifications for this UAV are summarized in
Table 1. Non-dimensional aerodynamic coefficients of the target UAV are required for the 6-DOF flight simulation described in the section. The non-dimensional aerodynamic coefficients were calculated using the estimation equation in [
22]. The non-dimensional aerodynamic coefficients calculated using the dimensions of the target UAV shown in
Table 1 are summarized in
Table 2.
3.2. Determination of the Optimal Control Problem
The initial values of
for the optimal control problem are calculated using Equations (15)–(17) in
Section 2, and the values are summarized in
Table 1, including the glide slope angle
and the airspeed
during the glide slope. The glide slope angle
is 7.0 degrees, and the airspeed
during the glide slope is set as 25.0 m/s. The initial value of
is calculated using Equation (19) in
Section 2, and the initial value of the angle of attack
, which is a variable in Equation (19), is calculated from the longitudinal equilibrium equation. All initial values are summarized in
Table 3. The word “free” in
Table 3 means “not constrained”. By solving the longitudinal equilibrium equation, the elevator angle and thrust are calculated in addition to the angle of attack, and these values are summarized in
Table 4. The magnitude of thrust in the optimal control problem is assumed to be constant at 6.35 N, as per
Table 4.
The terminal values for the optimal control problem are calculated based on the method in
Section 3 and are shown in
Table 5. The word “free” in
Table 5 means “not constrained”.
The inequality constraints for the angle of attack
and the elevator angle
in the optimal control problem are summarized in
Table 6. The inequality constraints for the pitch angular velocity
is calculated using Equation (21) in
Section 2.
is calculated as −9.07 degrees from
Table 3.
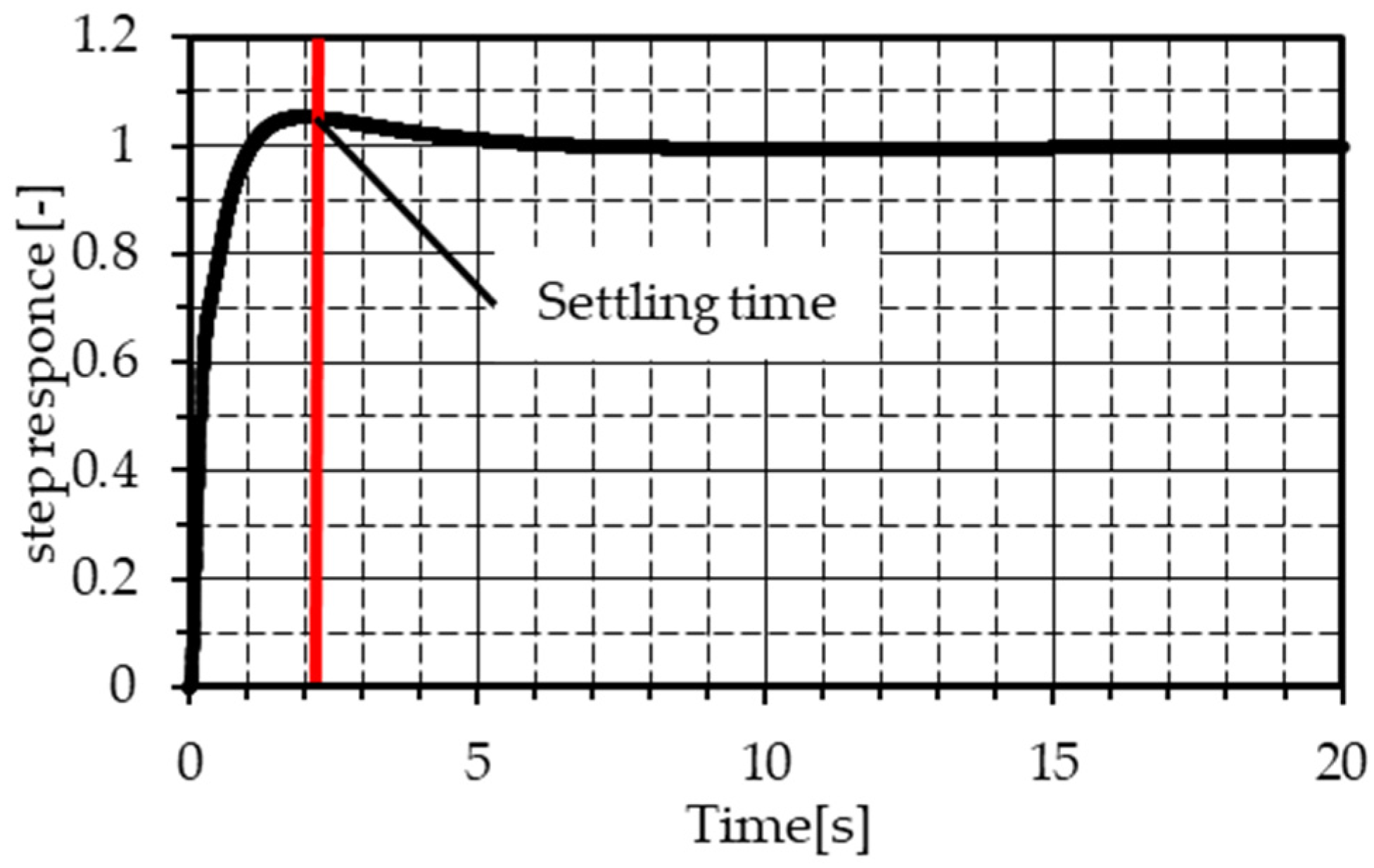
is determined by the settling time of the step response of the pitch angle control system, which is the flight control system during landing, as shown in
Section 5. The step response of the pitch angle control system is shown in
Figure 4, and the settling time is confirmed as 2.37 s because the settling time in this study is defined as the time it takes to converge to
or less of the target value. As a result, the upper limit of the pitch angular velocity is determined, as summarized in
Table 6.
The weight coefficients A and B in the evaluation function, and the number of nodes N when converting from the optimal control problem to the nonlinear optimization problem are summarized in
Table 7.
3.3. Results for Determination of the Flare Time Constants
The optimal control problem is converted into a nonlinear optimization problem using Hermite–Simpson collocation and is numerically solved by the sequential quadratic programming (SQP) method using the conditions summarized in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7. When solving with the proposed method, an initial solution is required. In this study, the sequential quadratic programming method is not sensitive to initial solutions and consistently converges to nearly the same solution when moderate and reasonable initial solutions are provided. In this study, various initial solutions were set, and the nonlinear optimization problem was solved, respectively. Specifically, the initial solution of the flare time constant is constant and given within the range of 1.3 to 2.5 s. The initial solutions of altitude and descent rate are determined using Equations (14) and (18), respectively, and vary depending on the initial solution of the flare time constant. The initial solutions of horizontal distance and horizontal velocity are computed based on an airspeed of 25 m/s, the time t, and the corresponding initial solution of descent rate. The initial solution of the pitch angle is adjusted to ensure that the nose is raised while satisfying the inequality constraint on pitch angular velocity, and the initial solution of the elevator deflection angle is set to a constant negative value.
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11 below show the optimal solutions for the state and control variables.
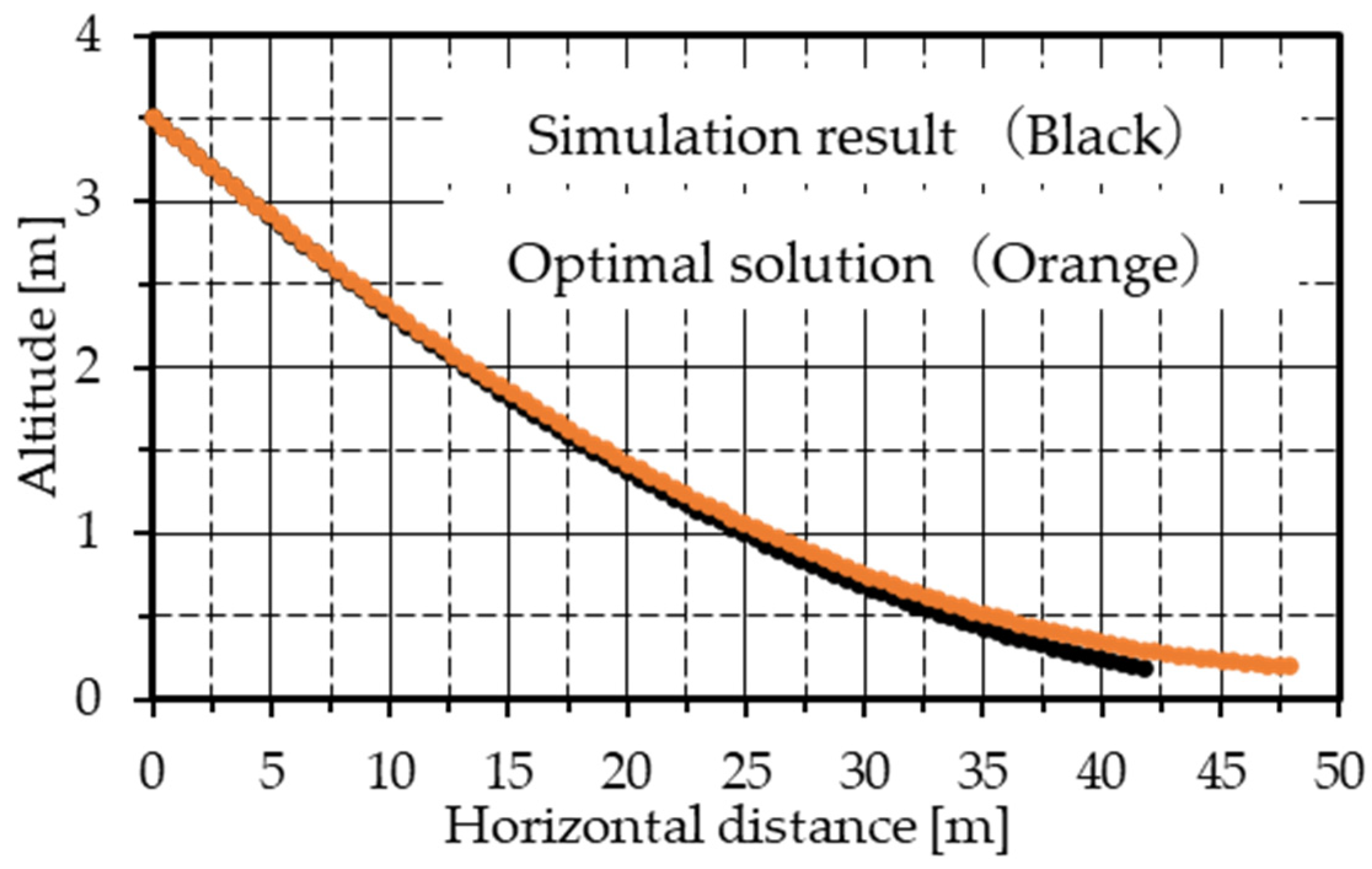
Figure 5 shows the relationship between altitude and horizontal distance, which indicates that the UAV starts to fly at an initial altitude of 3.51 m and then arrives at a terminal altitude of 0.2 m, and the total horizontal distance from the start to the terminal is confirmed as 47.9 m. As shown in
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10, the terminal time was 1.95 s.
Figure 6 shows the time histories of the pitch angle, path angle, and angle of attack. The pitch angle rose from the initial value of −9.07 degrees to −1.74 degrees, and the initial value of the path angle was −7.0 degrees since the glide slope angle was set to 7.0 degrees. The calculated terminal value of the path angle is confirmed as −0.41 deg. As shown in
Figure 7, there was a slight deceleration in the horizontal direction, and the terminal value was confirmed as 24.0 m/s. As shown in
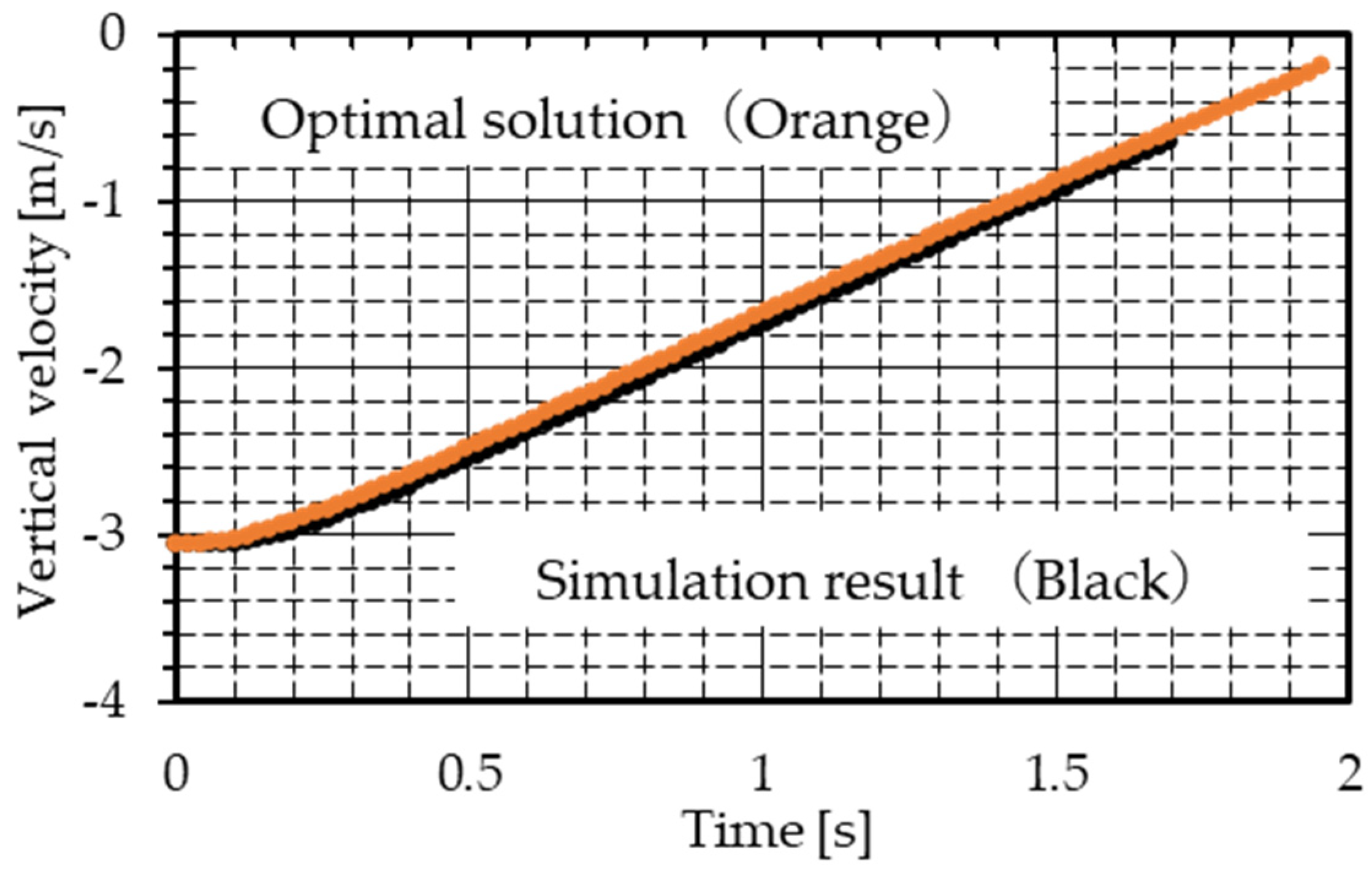
Figure 8, there was a deceleration in the vertical direction, and the terminal value is confirmed as −0.17 m/s. As shown in
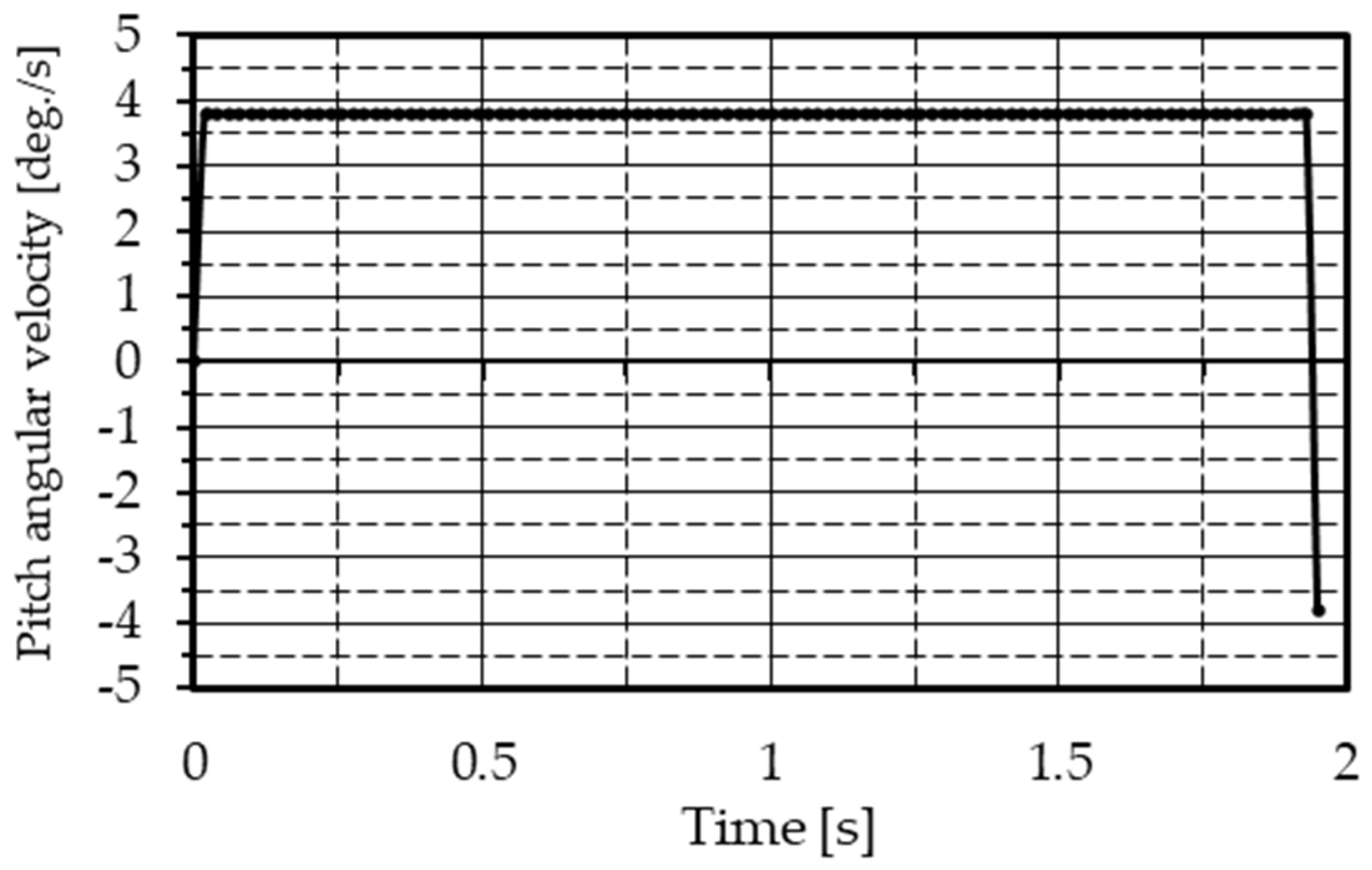
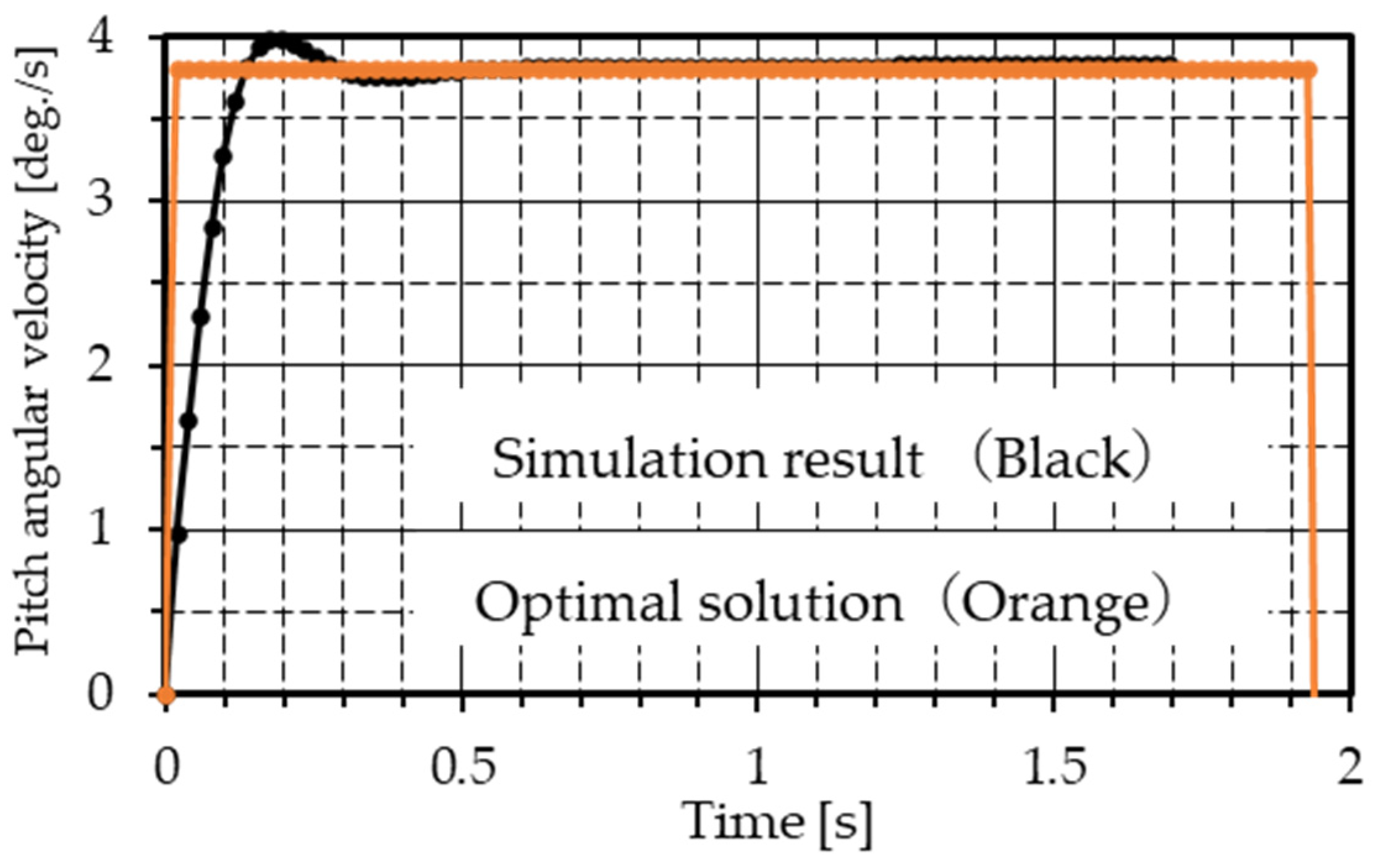
Figure 9, the initial value of the pitch angular velocity is confirmed as 0.0 deg./s, the terminal value is confirmed as −3.8 deg./s, and the points other than the endpoints are confirmed as 3.8 deg./s. So, the pitch angular velocity is generated in the direction of nose-up. As shown in
Figure 10, there is divergence between the numerical solutions of the initial and terminal values of the elevator angle. The points other than the endpoints are positive values, and these gradually decrease. In
Figure 11, the flare time constant is confirmed as 1.15 s and is constant. The obtained flare time constant is the value at which a path close to the ideal exponential type of path of the flare is realized while minimizing the horizontal distance during the flare phase.
Therefore, the optimized flare time constant is set as 1.15 s.
Although this study evaluates the proposed method under a single flight condition, this condition represents a typical condition for the target high-speed fixed-wing UAVs. As a result, the findings provide valuable insights into practical applications. Furthermore, even if parameters such as the glide slope angle or initial speed at the start of the flare phase were changed, the overall airplane behavior is expected to remain largely unchanged. This is because the first term of the evaluation function in Equation (13) compels the airplane to follow an ideal exponential trajectory across different flight conditions. Therefore, the characteristics of the optimal solutions, including altitude, speeds, and attitude angles, are anticipated to remain consistent under varying conditions.
3.4. Confirmation Through Longitudinal Flight Simulation
In this section, both the accuracy of the optimal solution obtained in
Section 3.3 and the validity of the motion model used in the nonlinear optimization problem are evaluated. For this, the optimal solution obtained in
Section 3.3 is compared with the simulation results obtained by adding the time-series data for the elevator angle. The results obtained for the longitudinal flight simulation are assumed to be the true values, and the accuracy of the optimal solution can be confirmed through comparison with these values. The validity of the motion model is finally assessed based on this assessment of accuracy. The procedure for longitudinal flight simulation was developed by us using MATLAB [
23] and Simulink [
24] and does not include lateral motion or landing control systems.
3.4.1. Conditions for Longitudinal Flight Simulation
The time-series data for the elevator angle in
Figure 10 are used as the input in the longitudinal flight simulation. However, the numerical solution for the endpoints of the elevator angle diverged, so the value of the endpoints was set to the same value as the value of the next node. The sample time for the longitudinal flight simulation was set to 0.01969 s, the same as the time interval between the nodes for the optimal solution, and the initial altitude was set at the same value as the initial value for the optimal solution. The thrust is set as 6.35 N, the same as in the conditions set for the nonlinear optimization problem. The condition for stopping the longitudinal flight simulation is an altitude of 0.2 m.
3.4.2. Results for Longitudinal Flight Simulation
The simulation results are shown in
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15 and
Figure 16. Each figure shows the optimal solution (orange) in
Section 3 and the time history (black) of the so-called true value when the elevator angle shown in
Figure 10 of
Section 3 is used as the input in the longitudinal flight simulation.
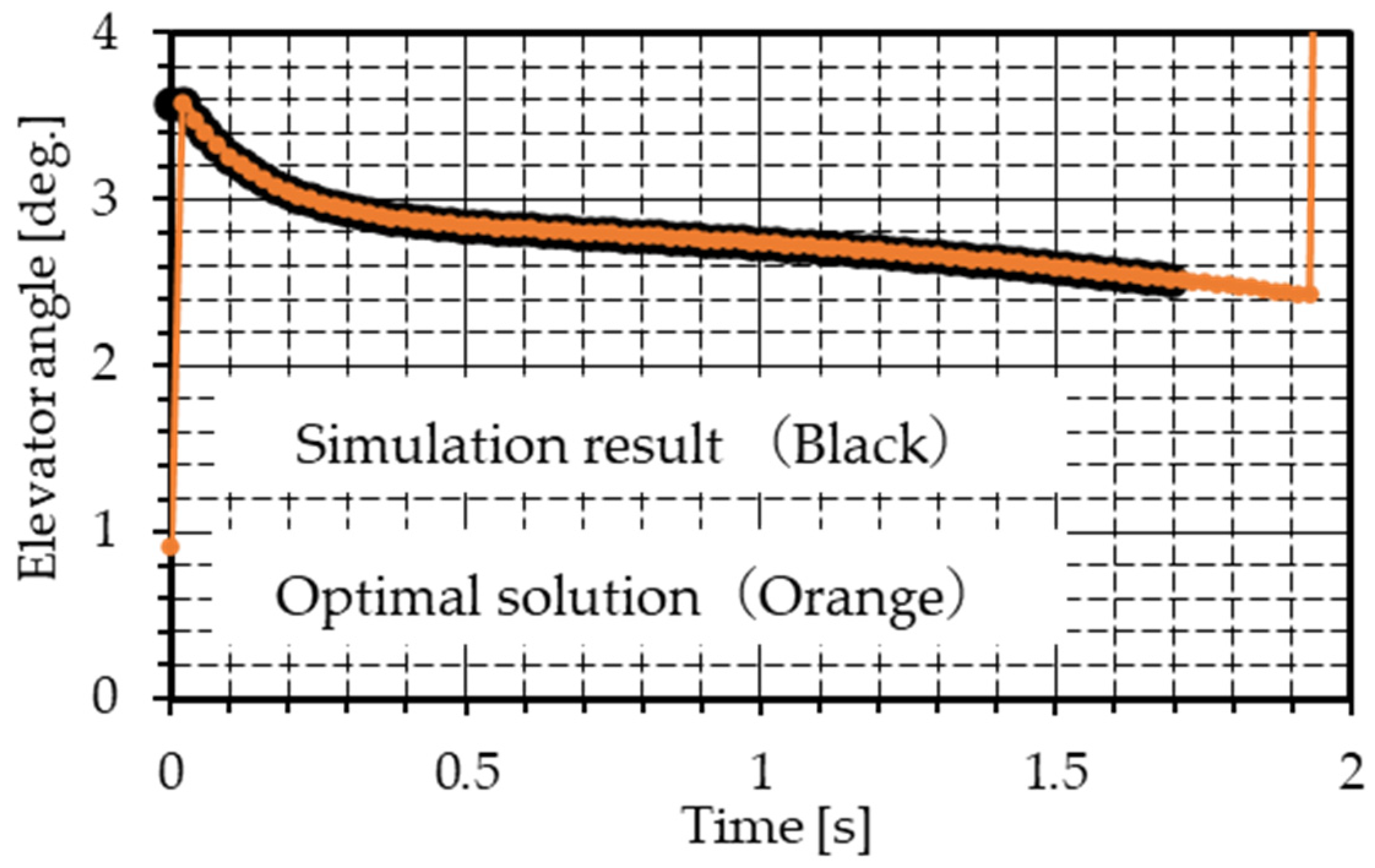
Figure 12 shows the elevator angle, and the elevator angle input in the simulation corresponds to the optimal solution value up to 1.69 s. The results of this simulation imply that an altitude of 0.2 m is reached at 1.69 s when inputting the elevator angle of the optimal solution, and the terminal time of the optimal solution is confirmed as 0.26 s larger than the true value.
Figure 13 shows the relationship between altitude and horizontal distance, and the horizontal distance of the optimal solution is confirmed to be about 6.1 m larger than the true value.
Figure 14 shows the time history of the vertical velocity based on the simulation and the vertical velocity of the optimal solution. The difference between the two ranges from about 0.002 m/s to 0.07 m/s, with the latter value smaller than the former and with a longer descent time. Because of this difference, the time until touchdown according to the optimal solution becomes longer than that determined from the simulation.
Figure 15 shows the pitch angle, which for the optimal solution, ranges from about 0.04 degrees to about 0.17 degrees, which is lower than the true value.
Figure 16 shows the pitch angular velocity. The difference between the optimal solution and the true value is large until about 0.5 s from the zero-second point, and the maximum deviation is about 2.8 degrees/s. Since the pitch angle is the value obtained by integrating the pitch angular velocity, the result in
Figure 15 shows that the pitch angle up to the point of touchdown obtained using the optimal solution is larger than that obtained from the simulation.
From the above results, the accuracy of the optimal solution is found to decrease at the initial node, at the terminal node, and around those nodes but remains sufficient at other nodes. The reason for this is that, for the Hermite–Simpson collocation method, which is a discretization method, dynamic constraints are not imposed on the endpoints, and the equations of motion of the system are not satisfied at those points. However, the error in the horizontal distance is about 6.1 m, which is less than 1% of the total landing distance and considered negligible. In addition, the transient response of the landing control system is added in the process of the optimal solution. Therefore, it is concluded that the motion model used in the nonlinear optimization problem, described in
Section 2 of this paper, is appropriate.
4. Verification Using Simulation of a 6-DOF Flight
In this section, a simulation is used to confirm both the validity of the method for determining the flare time constant by solving an optimal control problem using a motion model approximated to three degrees of freedom and the feasibility of safe touchdown by controlling the airplane according to the descent rate command determined by the optimal flare time constant
under conditions close to the real environment. Also, the effectiveness of the proposed method in design is demonstrated by comparing the landing distances with a general flare time constant and an optimally set flare time constant. The simulation involves paths from the glide slope phase to the flare phase carried out according to a six-degrees-of-freedom flight motion, and it was internally developed by us using MATLAB [
23] and Simulink [
24] and incorporates the coupling between the angular velocities (p, q, r) in rotational motion, as well as the coupling between the translational velocities (u, v, w) and the angular velocities (p, q, r) in translational motion. Additionally, the aerodynamic forces and moments include the quadratic dependence on velocity, meaning that second-order terms are not neglected.
4.1. Conditions for 6-DOF Flight Simulation
The initial flight conditions for the glide slope phase of the UAV are the same as those for the level-flight phase. Hence, the longitudinal equilibrium equation is solved by setting the left side of Equations (1)–(3) to zero and substituting a path angle of zero degrees so as to calculate the pitch angle, angle of attack, and elevator angle during level flight. In solving the longitudinal equilibrium equation, it is assumed that the UAV is flying at an airspeed of 25 m/s, a roll angle of zero degrees, and a heading angle of zero degrees with a steady wind for which the parameters are summarized in
Table 8. In addition, the initial position was also set as 0 m of the initial X position, 1.0 m of the initial Y position, and 90.0 m of the initial Z position. The glide slope angle is set as 7.0 degrees, which is the set value when determining the initial conditions for the optimal control problem in
Section 3.2. The altitude
when transitioning from the glide slope phase to the flare phase is calculated from Equation (17). The terminal condition of the flare phase, i.e., the touchdown altitude
, is set in the same way as
Table 5. These values are summarized in
Table 9.
Target UAV systems are subject to uncertain factors such as wind and sensor noise. These were reproduced in the six-degrees-of-freedom flight simulation. Sensor noise was added to the attitude angle data (pitch angle, roll angle, and yaw angle) and airspeed data. For the accuracy of the attitude angle, we referred to the catalog values for INS systems in [
25], and regarding the airspeed accuracy, we referred to the values measured by a wind tunnel test facility. These values are summarized in
Table 10. In simulations, the steady wind model and the continuous gust model [
26] are used as wind models, where it is assumed that the steady wind blows parallel to the ground surface. The magnitude of the steady wind
is determined by the power law of wind velocity shown in Equation (23) and is dependent upon altitude [
27]. The direction of the steady wind is set at a 30-degree azimuth. The values used in Equation (23) are summarized in
Table 10. In the continuous gust model, the Dryden turbulence model is used to express the magnitude of turbulence on each axis.
Only newly introduced variables included in Equation (23) are defined here.
represents the ground height of the observation point in meters. represents the parameter of the power law. represents the windspeed at the observation point in meters per second.
4.2. Flight Control System of a UAV During Landing
The 6-DOF flight simulation is carried out for verification of the landing phase, which consists of the glide slope phase and the flare phase. A glide slope control system is used in the glide slope phase, and a flare control system is used in the flare phase. Each control system is composed of a longitudinal motion control system and a lateral motion control system. The block diagram of the longitudinal motion control system of the glide slope control system is shown in
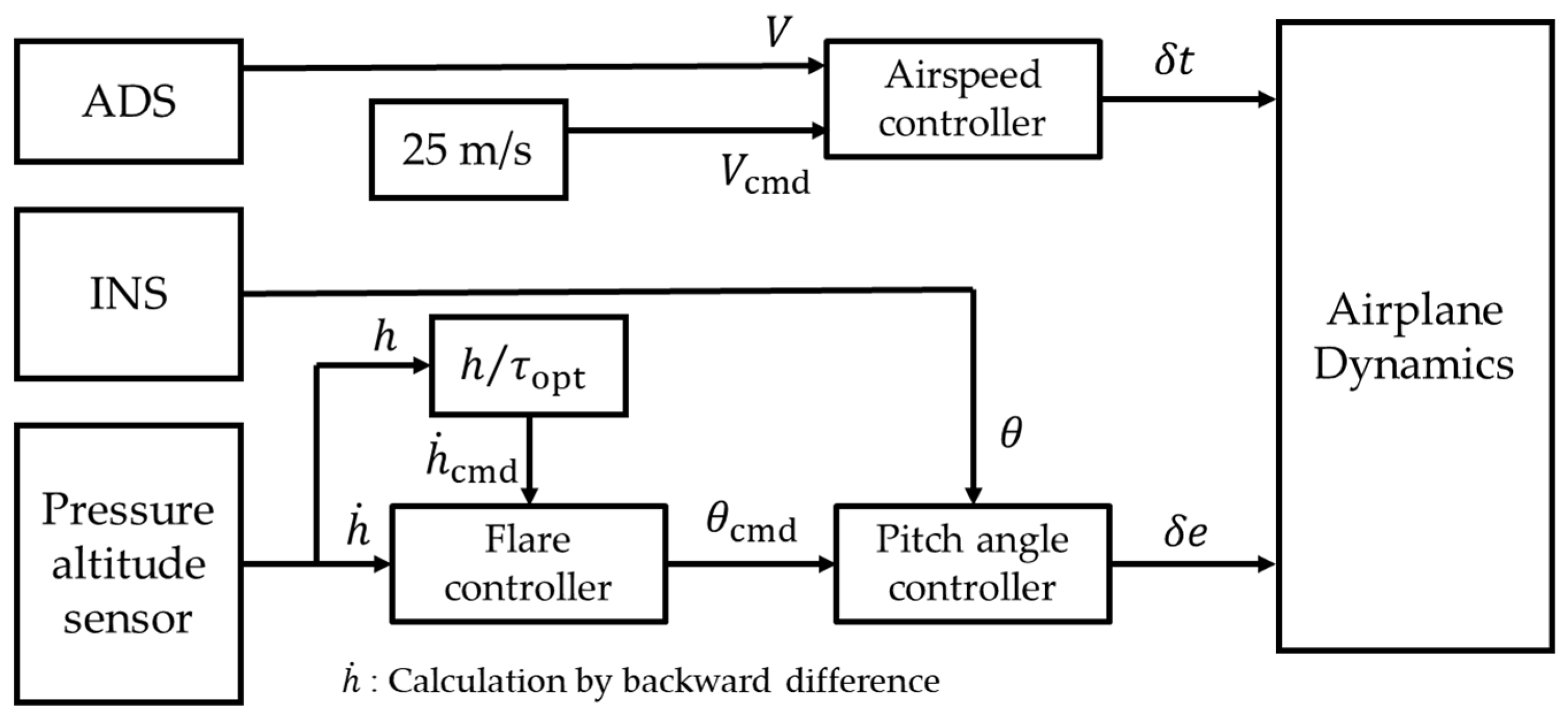
Figure 17, and the block diagram of the longitudinal motion control system of the flare control system is shown in
Figure 18. The lateral motion control system, which is commonly used in glide slope and flare control systems, is shown in
Figure 19. In addition, PID control laws are used in all control systems.
The longitudinal motion control system in the glide slope phase adjusts the pitch angle using the elevator to match the value designated by commands in accordance with the deviation from the target flight trajectory. In addition, it adjusts the thrust to the value designated by the commands, in accordance with the deviation from the target airspeed.
In the control system for longitudinal motion during the flare phase, the descent rate is used as a command. The descent rate command is generated using the current altitude and the optimized flare time constant. Commands for the pitch angle are generated according to the deviation from the descent rate. Similarly, as for the glide slope control system, the commands for thrust are generated according to the deviation from the target airspeed.
The lateral motion control system adjusts the roll angle to the value designated by commands using the aileron, in accordance with the deviation from the center line of the runway.
4.3. Results of the 6-DOF Flight Simulation
4.3.1. Entire Landing Trajectory
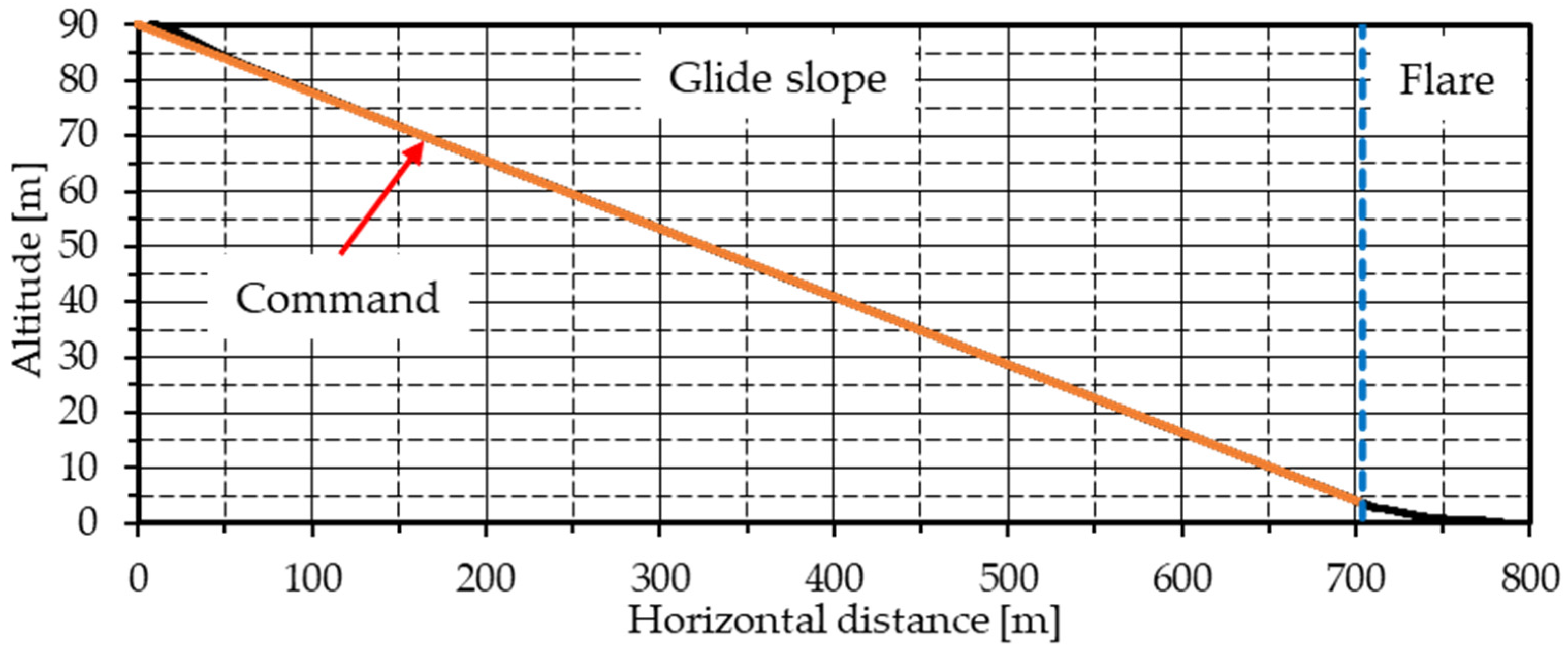
Figure 20 shows the entire landing trajectory from the start of the glide slope phase to the flare phase. During the glide slope phase, the UAV slightly exceeded the command value up to the first horizontal distance of 50 m but then adhered to the command value.
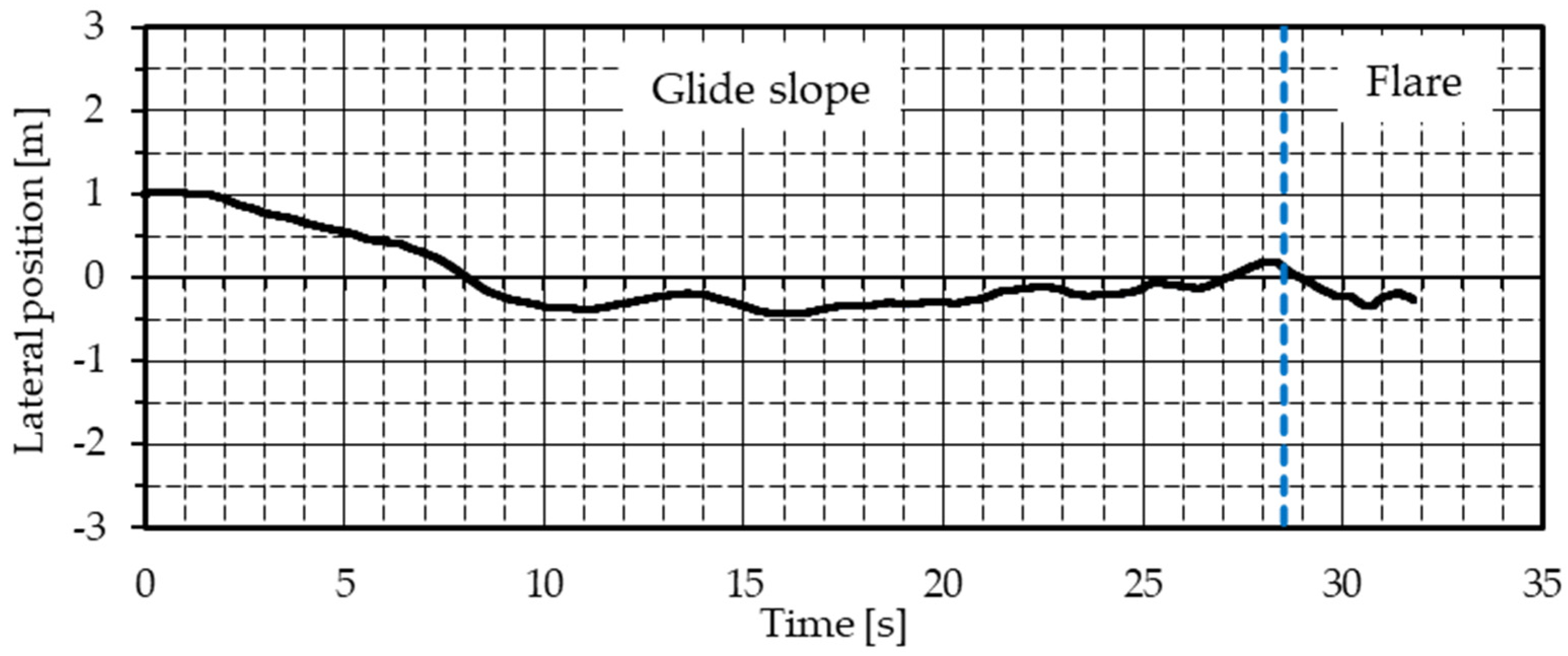
Figure 21 shows the lateral position. Although there is an initial deviation of 1.0 m and wind disturbance is included, the UAV is flying along the center of the runway, and the lateral motion control system is functioning well.
4.3.2. Glide Slope Phase
Figure 22 shows the pitch angle, and during the glide slope phase, there is a delay in response to commands until about 3 s after the start, after which it instantaneously responds to the commands. The average pitch angle between 20 and 25 s is confirmed as −10.08 deg., which is fairly consistent with the initial conditions for the pitch angle set in the nonlinear optimization problem.
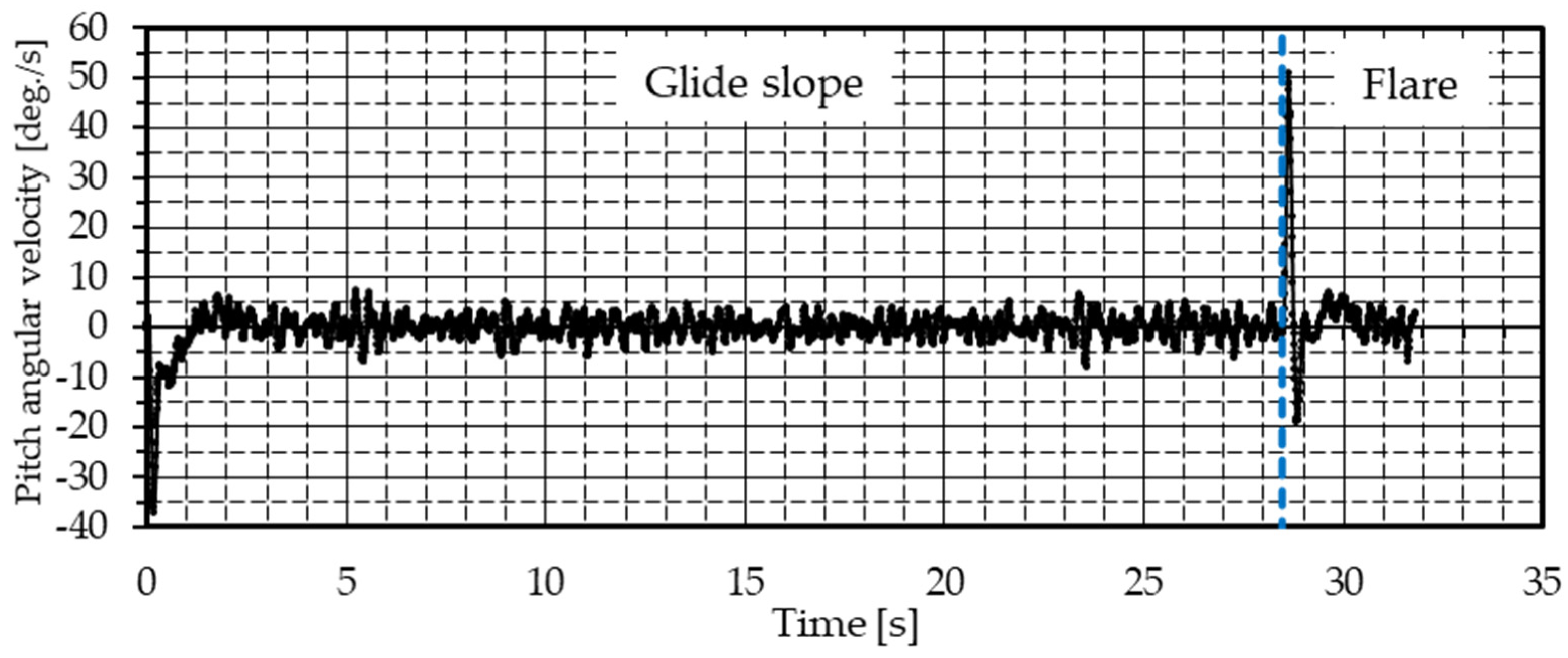
Figure 23 shows the pitch angular velocity, and it is balanced at around zero deg./s in the latter half of the glide slope phase.
Figure 24 shows the elevator angle, and the average elevator angle between 20 and 25 s of the glide slope phase is confirmed as 3.95 deg, which is approximately the same as the elevator angle during balance shown in
Table 4.
Figure 25 shows the airspeed, which remained at about a 25 m/s constant during the glide slope phase.
Figure 26 shows the thrust, which was constant at about 6.0 N during the glide slope phase from about 16 s to 28 s. This thrust value is approximately the same as the thrust value during balance shown in
Table 4.
4.3.3. Flare Phase
Figure 22 shows the pitch angle, and the UAV follows the command. And the nose is raised up to a pitch angle of −1.63 deg.
Figure 23 shows the pitch angular velocity, and when the transition from the glide slope phase to the flare phase occurs, the pitch angular velocity reaches a maximum of 50.7 deg./s.
Figure 25 shows the airspeed, and the airspeed decreases slightly during the flare phase. This trend in the flare phase is consistent with the calculation results for the horizontal and vertical velocities in the nonlinear optimization problem in
Section 3 (
Figure 6 and
Figure 7).
Figure 26 shows the thrust, which increased to a maximum of 13.7 N during the flare phase. The increase in thrust during the flare phase is consistent with the decrease in airspeed, as shown in
Figure 25.
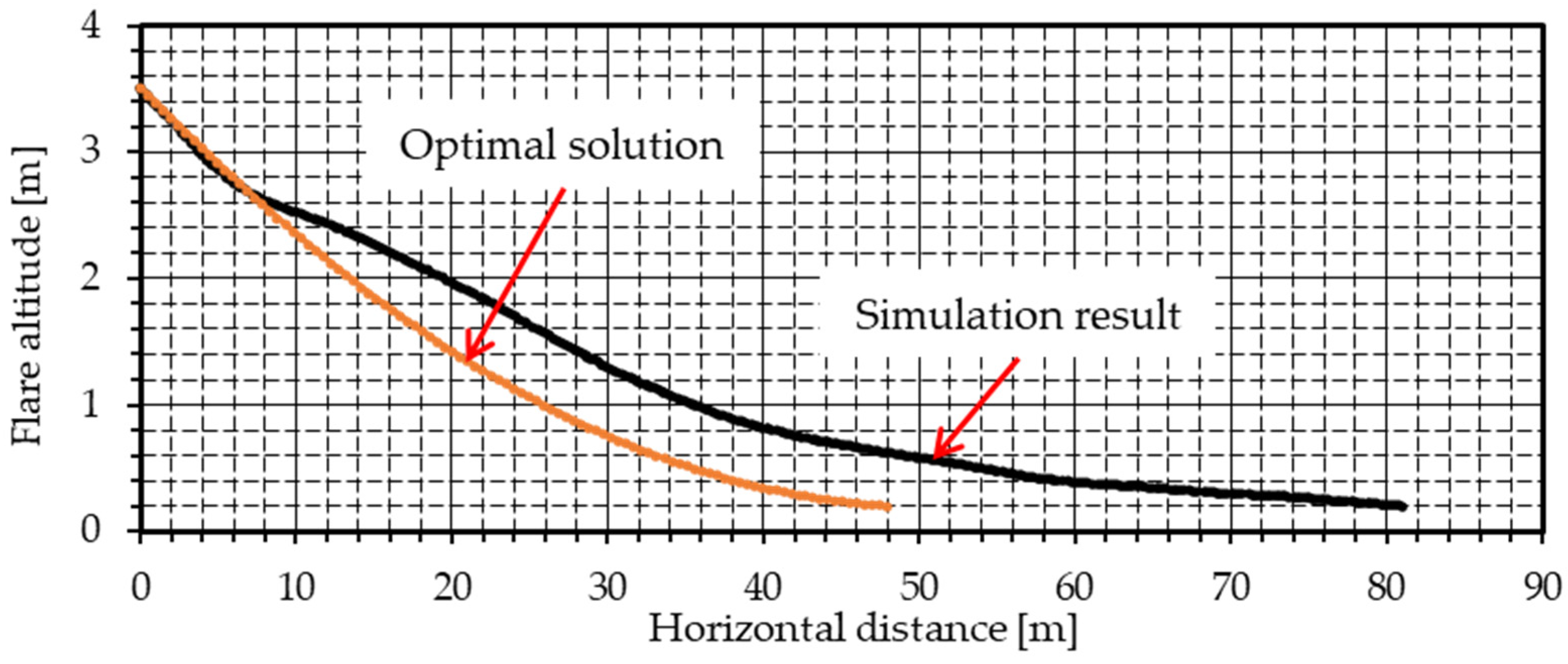
Figure 27 shows only the flare path in
Figure 20 and the optimal solution for the flare path described in
Section 3, and a comparison of the optimal flare path with the flare path in the 6-DOF flight simulation. After the flare starts, the UAV follows almost the same path until it reaches a horizontal distance of about 6 m, after which the simulation results show that the rate of descent decreases, and the terminal horizontal distance is 33.0 m greater than that for the optimal solution.
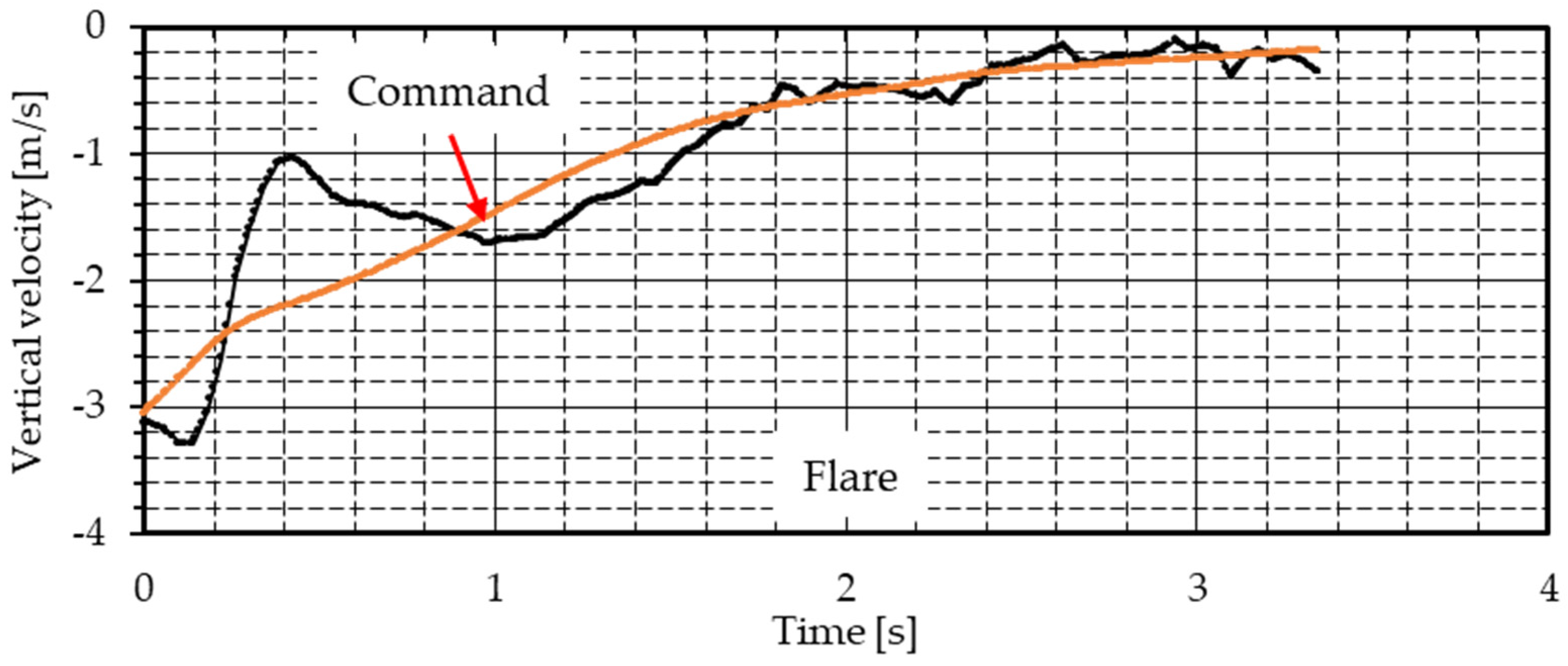
Figure 28 shows the vertical velocity (descent rate). The flare phase is controlled by the descent rate command calculated using Equation (24), which includes the variables for current altitude and the flare time constant
determined in
Section 3. Although the time history of the descent rate is a transient response until about 1.8 s, it subsequently converges to the command value. At touchdown, the vertical velocity (descent rate) was −0.34 m/s, achieving the target descent rate suppression of −1.0 m/s or more and 0.0 m/s or less.
From these results, it is concluded that the method for determining the flare time constant by solving an optimal control problem using a motion model approximated to three degrees of freedom is reasonable, and landing control can feasibly be achieved using the optimized flare time constant.
4.4. Effectiveness of Applying the Optimized Flare Time Constant
This section compares the landing distances for a typical flare time constant and an optimized flare time constant and quantitatively demonstrates the effectiveness of the proposed method. The typical flare time constant is set at 2 to 5 s [
5], and in this study, it is set to 3.5 s. By changing the flare time constant, the switching altitude
from the glide slope phase to the flare phase is determined as 7.62 m according to Equation (17). However, all other simulation conditions remain as summarized in
Section 4.1.
When the flare time constant is set to 3.5 s, the landing distance is 983.9 m, as shown in
Figure 29. In contrast, with the optimized flare time constant of 1.15 s, the landing distance is reduced to 785.4 m, as shown in
Figure 20, resulting in a 20.2% reduction. Therefore, using the optimized flare time constant calculated by the proposed method is effective in reducing the landing distance.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}