1. Introduction
Natural disasters (floods, earthquakes, and wildfires) and urban security incidents (large-scale emergencies, critical infrastructure threats, and mass public gathering events) necessitate rapid Earth observation capabilities, driving the demand for efficient and flexible satellite monitoring systems [
1,
2,
3]. In such time-critical scenarios, the capability to swiftly acquire high-resolution imagery of specific targets while maintaining comprehensive situational awareness is essential [
4,
5,
6]. Agile Earth observation satellites (AEOSs), equipped with enhanced attitude control through roll and pitch adjustments, have emerged as vital tools for emergency response monitoring [
7,
8,
9]. However, the effective utilization of these satellites presents significant mission planning challenges, particularly when addressing densely distributed observation targets with heterogeneous priority levels [
10,
11,
12]. These challenges manifest primarily in coordinating observations across multiple high-priority targets while satisfying strict physical constraints, including attitude maneuver limitations and continuous observation requirements for data quality [
13,
14,
15]. The complexity intensifies with the necessity to select optimal observation windows from multiple available time periods within the planning horizon while accounting for temporal coupling between successive observations [
16,
17,
18]. This temporal–spatial coordination requirement, combined with emergency response urgency, presents a distinctive set of challenges that substantially impact satellite mission planning effectiveness [
19,
20].
While real-world satellite operations do involve complex interactions between subsystems (e.g., power management, sensor types, and environmental factors like cloud cover), the current study focuses on the core challenge of efficiently coordinating the observations of multiple high-priority targets under strict time and maneuver constraints. Our research primarily addresses the task scheduling problem for densely distributed targets, where the focus is on optimizing satellite attitude maneuvers and minimizing observation delays, thereby enhancing operational efficiency in time-sensitive scenarios. The effects of environmental factors, such as sensor performance or energy management, are outside the scope of the current study but could be explored in future work.
While comprehensive satellite operations involve multiple subsystems, including communication scheduling, our study focuses specifically on the observation planning component to achieve advances in priority-based target acquisition. This approach aligns with modular satellite mission planning architectures, where observation scheduling generates data acquisition tasks that are subsequently managed by the communication subsystem.
Satellite mission planning approaches have evolved from energy-centric optimization toward more sophisticated methodologies addressing emergency response requirements [
21]. Traditional approaches emphasizing energy optimization and long-term efficiency [
22] have advanced through various algorithmic innovations. For instance, Ref. [
23] introduced methods for dense region observation, while Ref. [
24] developed an automatic task planning approach for observation scheduling. Although these methods represent initial efforts to balance computational efficiency with mission objectives, they exhibit limitations in handling densely distributed targets with varying priorities. Recent research has introduced advanced optimization techniques to address the temporal–spatial complexity inherent in emergency response scenarios [
25,
26,
27]. Notably, Ref. [
28] developed collaborative mission planning for area target imaging, while Ref. [
29] established an emergency task scheduling framework. Contemporary approaches utilizing multiple strategies [
30] show promise in managing complex scenarios. Nevertheless, these methods continue to face significant challenges in simultaneously addressing time-dependent maneuver constraints, priority-based target selection, and temporal coupling in dense distribution scenarios, particularly when the rapid acquisition of high-priority targets is critical for effective emergency response.
To address these limitations and enhance the effectiveness of emergency response satellite mission planning, this paper proposes a target clusters and dual-timeline optimization (TCDO) framework. The TCDO framework synthesizes priority-based geographical clustering with temporal–spatial coordination mechanisms through two key components: a priority-based geographical clustering method that systematically groups targets according to their priority levels and spatial distribution, and a dual-horizon planning mechanism that integrates short-term emergency response optimization with long-term coverage objectives. This comprehensive approach ensures both rapid high-priority target acquisition and efficient overall coverage.
The main contributions of this paper are as follows:
A novel priority-based geographical clustering method is developed that effectively manages densely distributed targets while preserving their priority relationships, substantially enhancing computational efficiency in large-scale scenarios.
An innovative dual-horizon planning mechanism is proposed that optimally balances immediate emergency response requirements with long-term coverage objectives while rigorously incorporating satellite attitude maneuver constraints.
The real-time response capability of the framework is demonstrated through comprehensive experiments, establishing superior performance in both computational efficiency and priority-based target acquisition compared to state-of-the-art methods.
The remainder of this paper is structured as follows:
Section 2 presents the system model and problem formulation, encompassing satellite attitude dynamics and target observation constraints.
Section 3 delineates our proposed algorithm framework, elaborating on the priority-based clustering method and dual-horizon planning approach.
Section 4 presents comprehensive simulation results and a comparative analysis using real-world scenario data. Finally,
Section 5 concludes the paper with a summary of contributions and future research directions.
2. Problem Formulation
Emergency response observation missions require agile Earth observation satellites (AEOSs) to efficiently acquire imagery of multiple densely distributed targets with varying priority levels. The core challenge lies in coordinating the satellite’s attitude maneuvers to maximize observation effectiveness while adhering to multiple operational constraints. This section provides a comprehensive mathematical framework for the problem, covering satellite attitude dynamics, observation geometry, and mission constraints.
The problem formulation proceeds as follows: First, we develop a detailed system model to characterize the satellite’s attitude dynamics and observation geometry via coordinate transformations. Next, we specify the physical and operational constraints to ensure feasible mission execution. Finally, the problem is formulated as a mathematical optimization model to guide the development of solution algorithms.
The TCDO framework is designed with flexibility to accommodate various orbital parameters typical for Earth observation missions. Our current implementation and analysis focus on satellites in circular Low Earth Orbit (LEO), which represents the most common configuration for agile Earth observation platforms.
2.1. System Model
While Earth observation satellites typically employ three-axis attitude control, our model focuses on roll and pitch adjustments as the dominant mechanisms affecting target acquisition in the emergency response scenarios considered in this study. This simplification is justified by the regional nature of our application, where yaw requirements remain relatively consistent across observations, a modeling approach that aligns with other state-of-the-art formulations [
31].
Figure 1 illustrates the three essential coordinate systems used in our formulation: (1) the Earth-Centered Inertial (ECI) frame
O-
, where the origin
O is at the Earth’s center,
points along the Earth’s rotation axis, and
and
lie in the equatorial plane, with
pointing toward the vernal equinox; (2) the orbital coordinate systems
-
(where
represents different satellite positions), with the origin
at the satellite’s center of mass at position
i,
pointing toward the Earth’s center,
perpendicular to the orbital plane, and
completing the right-handed system along the velocity direction; and (3) the satellite body coordinate systems
-
, where the origin is at the satellite’s center of mass, the
-axis aligns with the optical axis, and the
and
axes align with the satellite’s roll and pitch rotation axes, respectively. The figure also illustrates the line-of-sight (LOS) vectors connecting the satellite to targets
and
, and the roll angles
and pitch angles
required to align the satellite’s optical axis with each target.
The satellite employs a push-broom imaging mode with two-axis attitude maneuverability. The conical regions (shaded in yellow) represent the feasible attitude maneuver envelope of the satellite’s optical axis, which is determined by the maximum roll and pitch angles achievable by the attitude control system.
The relative position between the satellite and a ground target in the ECI frame at time
t is expressed as
where
and
represent the position vectors of the target and satellite in the ECI frame, respectively.
The transformation from ECI to the orbital frame is achieved through a rotation matrix
:
where
is determined by the satellite’s orbital position and velocity:
In Equation (
3),
represents the rotation matrix from ECI to the orbital frame at time
t, calculated using the satellite’s position vector
and velocity vector
in the ECI frame. The matrix is constructed using three orthogonal unit vectors: the first row contains the normalized velocity vector
, which defines the
-axis of the orbital frame; the third row contains the normalized angular momentum vector
, which defines the
-axis; and the second row completes the right-handed system. The notation
indicates the Euclidean norm of the velocity vector, while × denotes the cross-product operation.
The transformation methodology between coordinate systems follows advanced approaches in satellite attitude determination [
32,
33], adapted for agile Earth observation contexts.
The line-of-sight (LOS) vector from the satellite to the target in the orbital frame can be normalized as
To align the satellite’s optical axis with the target, the body frame needs to rotate from the orbital frame through roll angle
and pitch angle
. The transformation matrix
from the orbital to the body frame is
The LOS vector in the body frame should align with the optical axis along the
z-axis:
From this alignment condition, the required attitude angles can be derived:
In Equations (
7) and (8),
and
represent the required pitch and roll angles, respectively, at time
t to align the satellite’s optical axis with the target. These angles are derived from the condition that the line-of-sight vector in the body frame should align with the optical axis along the
z-axis, as expressed in Equation (
6). The components
,
, and
are the elements of the normalized line-of-sight vector in the orbital frame, derived from Equation (
4). The arcsin function in Equation (
7) provides the pitch angle needed to align the
x-axis component, while the arctan function in Equation (8) determines the roll angle required to align both the
y and
z components simultaneously.
2.1.1. Attitude Dynamics with Flywheel Actuator
For attitude control, we model the satellite’s dynamics assuming the use of a flywheel-based actuation system. The dynamics of the pitch and roll angles,
and
, can be expressed as second-order differential equations:
where
and
represent the moments of inertia around the pitch and roll axes,
and
are the damping coefficients, and
and
are the control torques generated by the flywheel system. The flywheel-based attitude control model builds upon recent formulations by [
34,
35], with the parameters calibrated to match contemporary agile satellite capabilities.
We now define the total energy required for an attitude maneuver, which includes both kinetic energy and control energy. The total energy consumed during the maneuver is expressed as
where
is the energy coefficient for the flywheel system.
represents the absolute angular difference in the attitude angle
. This parameter quantifies the magnitude of the attitude adjustment required between observations, which directly impacts both the maneuver time and energy consumption.
is the payload power consumption, and
is the observation duration. This energy consumption is primarily determined by the angle change, considering the linear relationship between the actuation torque and angle adjustment.
The time required for a maneuver is given by the maximum time required for either roll or pitch adjustment:
where
with
being the maximum angular velocity.
2.1.2. Energy Consumption and Power Budget
To account for the power budget, the energy consumption during the satellite’s operations, including both attitude maneuvers and observation, is constrained by the satellite’s energy resources. The total energy consumption is modeled as Equation (
11). The satellite operates in the Earth’s shadow and sunlight regions, which necessitates the consideration of solar energy generation only during the sunlight phase. The energy available from the solar arrays during the mission can be modeled as
where
is the power generated by the solar panels during the sunlight phase, and
represents the time duration when the satellite is exposed to sunlight. The total energy consumption is then bounded by the energy provided by both the battery and solar arrays:
where
represents the available battery capacity,
denotes the basic power consumption for satellite operations, and
is the power system efficiency coefficient. This constraint ensures that the satellite can operate sustainably while maintaining a sufficient power margin.
Our energy constraint model employs a conservative approach that establishes a minimum energy threshold to be maintained throughout the mission. While operational satellites experience dynamic changes in battery capacity, this bound ensures mission feasibility for emergency response scenarios with relatively short planning horizons, where the initial battery state significantly influences energy availability [
36,
37].
2.2. Mission Constraints
Satellite mission planning must satisfy various physical and operational constraints, such as those for attitude maneuverability, observation geometry, and power consumption.
2.2.1. Attitude Maneuverability
The attitude maneuver constraints ensure that the satellite’s attitude adjustments remain within feasible limits, including the maximum roll and pitch angles between consecutive observations:
For the satellite model considered in this study, for both the roll and pitch angles, representing the typical mechanical and control system limitations of agile Earth observation satellites.
2.2.2. Observation Geometry
To ensure high-quality imagery, the observation geometry must adhere to field-of-view (FOV) constraints:
where
is the field-of-view angle.
2.2.3. Power Consumption
The satellite’s power consumption, including the energy required for attitude maneuvering and payload operations, must adhere to the power budget constraints discussed above.
2.3. Mathematical Model
The agile satellite observation scheduling problem is formulated as a constrained optimization problem. Let
denote the set of all targets and
represent the set of all feasible observation slots. The decision variables are defined as
The objective function integrates both the rapid response to high-priority targets and overall observation effectiveness:
The weighting parameters and in the objective function are set to 0.7 and 0.3, respectively, based on empirical testing to balance the response time and coverage efficiency.
This formulation ensures the efficient and feasible scheduling of the satellite’s observation mission while respecting the operational constraints and optimizing the observation coverage.
3. Target Clusters and Dual-Timeline Optimization Framework
The proposed target clusters and dual-timeline optimization (TCDO) framework addresses the challenge of scheduling agile satellite observations for densely distributed targets with heterogeneous priorities. Our framework integrates two key components: a priority-based geographical clustering method that organizes targets based on their spatial distribution and priority levels, and a dual-timeline coordinated planning strategy that balances the immediate priority response with long-term coverage optimization. This hierarchical approach enables the efficient handling of complex observation scenarios while maintaining both computational tractability and mission effectiveness.
3.1. Priority-Based Geographical Clustering
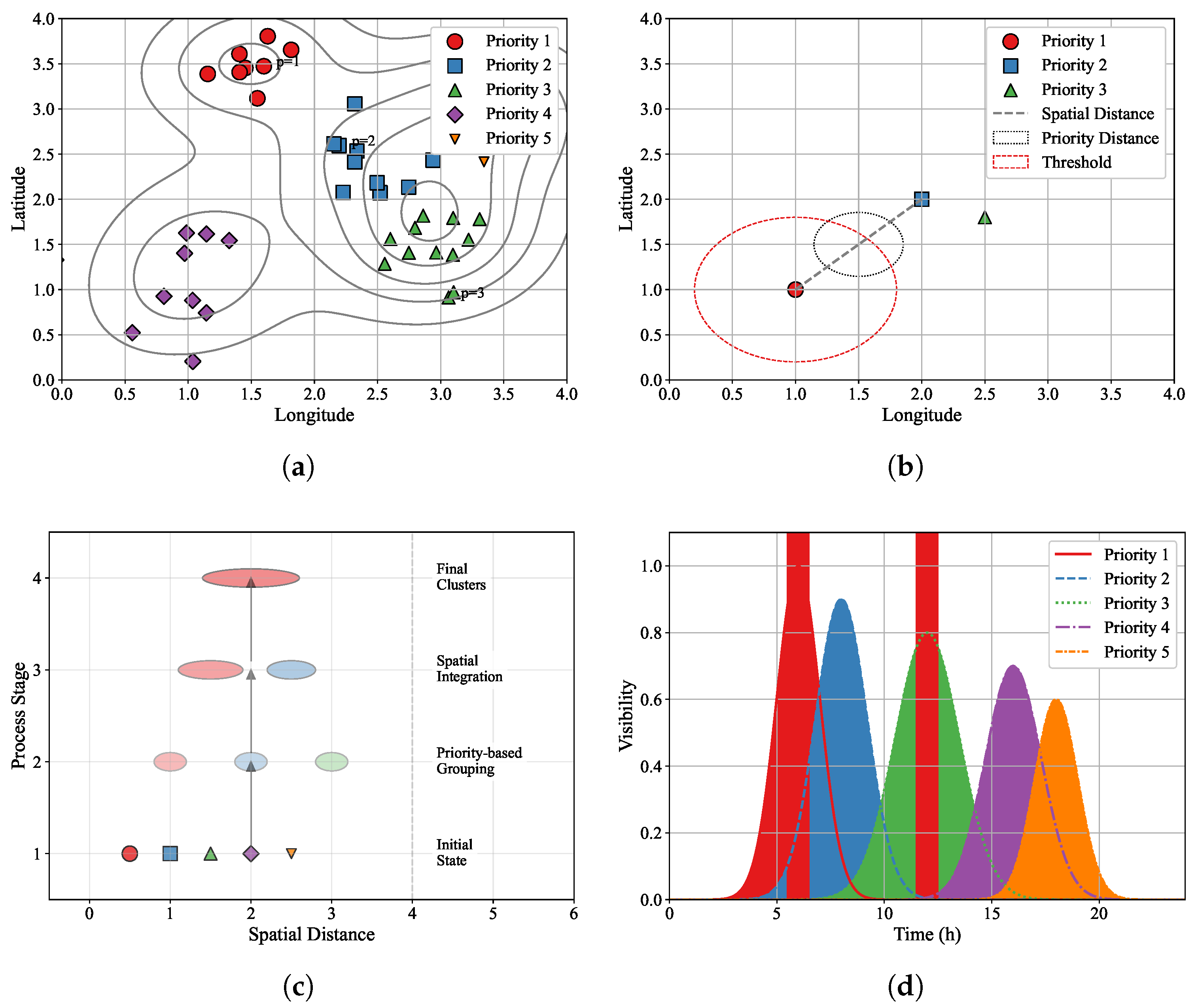
The proposed clustering method integrates both spatial distribution and target priority information through a novel composite distance metric. Given a set of observation targets
distributed across the surveillance area, each target
is characterized by its geographical coordinates
and normalized priority value
. As illustrated in
Figure 2a, targets with different priorities (indicated by different sizes and colors) exhibit natural grouping tendencies in their spatial distribution.
We propose an enhanced composite distance metric that effectively captures both spatial and priority relationships between targets. Given two targets
and
, their dissimilarity is quantified through a theoretically grounded distance function that integrates the Mahalanobis distance for spatial features and a nonlinear priority difference measure:
where
represents the spatial coordinates of target
i,
denotes the spatial covariance matrix that captures directional scale differences,
is the priority weighting coefficient, and
controls the sensitivity to priority differences. Our composite distance metric extends the work of [
38] on priority-integrated clustering, while the hierarchical approach adapts techniques from [
39] to the satellite observation context. The priority weighting coefficient
ranges from 0.3 to 0.8 depending on mission emphasis, with higher values used for emergency response scenarios. The sensitivity parameter
typically ranges from 1.5 to 4.0, with our experiments using
to provide appropriate differentiation between priority levels. This formulation offers several theoretical advantages over traditional Euclidean-based metrics: (1) The Mahalanobis component accounts for spatial feature correlations and varying scales in different directions. (2) The sigmoid-like priority difference term provides bounded, nonlinear sensitivity to priority variations. (3) The separable structure maintains computational efficiency while enhancing the representational capacity.
We begin by providing rigorous mathematical definitions of the key concepts in our framework.
Definition 1. The quality of a cluster at time t is defined as a tuple , wherewhere is the normalized priority density, is the priority-weighted radius of gyration, and is the temporal accessibility. In our implementation, the priority-weighted radius of gyration typically ranges from 0.05 to 0.3 in geographical coordinates for well-formed clusters, with higher values indicating more dispersed targets.
Definition 2. The urgency of a target at time t is defined aswhere is the target’s priority level, is the latest allowable observation time, is the remaining visibility window time, ϵ is a small positive constant for numerical stability, and is the urgency decay rate. The composite index generally ranges from 0.4 to 0.95, with used to balance priority emphasis and spatial efficiency. Clusters with are considered high priority for observation planning. Based on Definition 1 (Cluster Quality), Definition 2 (Priority Urgency), and the composite metric, we develop a hierarchical clustering approach that progressively constructs target groups reflecting both spatial efficiency and priority-based urgency. The clustering process begins with individual targets as singleton clusters
and iteratively merges clusters based on their inter-cluster distances. At each iteration
k, the distance between clusters is computed using a minimum linkage criterion:
To maintain cluster quality and prevent the formation of overextended groups, we introduce an adaptive clustering threshold that evolves with the target distribution characteristics:
where
is a scaling factor that controls cluster granularity. Clusters are merged according to the following criterion:
Each cluster
is represented by its priority-weighted geometric center
:
The characteristics of each cluster are quantified through several key metrics defined in Definition 2. The spatial dispersion of the targets within each cluster is measured through a priority-weighted radius of gyration
, capturing the geographical spread of the targets weighted by their priorities. To evaluate the overall significance of each cluster for observation planning, we introduce a composite index
that integrates priority levels with spatial compactness, where
is a parameter that balances priority emphasis and spatial efficiency in the cluster evaluation. Additionally, the temporal characteristics of the clusters are analyzed through their accessibility function
, where
represents the visibility time windows for target
, and
is the indicator function. This measurement helps identify optimal observation periods through the following condition:
where
represents the minimum required proportion of visible targets within a cluster.
Through this integrated clustering approach, our method effectively organizes observation targets into priority-aware spatial groups, providing a solid foundation for the subsequent dual-timeline planning process.
3.2. Dual-Timeline Planning Strategy
Our dual-timeline planning strategy addresses the inherent tension between the rapid response to high-priority targets and efficient overall coverage through an innovative coordination mechanism. As illustrated in
Figure 3, the framework consists of three main functional modules that process system inputs, including target properties, priority distribution, visibility windows, and system constraints. The pseudocode Algorithm 1 presents the detailed implementation of this coordination mechanism.
| Algorithm 1: Temporal–Spatial Coordinated Planning |
- 1:
function CoordinatePlanning() - 2:
Initialize planning parameters and energy budget - 3:
while mission active AND do - 4:
Update system metrics - 5:
- 6:
if then ▹ Priority-driven mode - 7:
SelectUrgentTargets() - 8:
ShortTermPlanning() - 9:
ExecuteObservation() - 10:
else ▹ Coverage optimization mode - 11:
SelectNextCluster() - 12:
LongTermPlanning() - 13:
ExecuteObservation() - 14:
end if - 15:
UpdateWeights() - 16:
UpdateSystemState() - 17:
end while - 18:
end function - 19:
functionUpdateWeights() - 20:
for do - 21:
EvaluatePerformanceDeviation(i) - 22:
- 23:
end for - 24:
NormalizeWeights() - 25:
end function
|
The target clustering module performs geographical grouping based on target locations and analyzes priority density to form meaningful clusters. These clusters serve as basic units for subsequent planning phases, enabling efficient resource allocation and coordinated observation scheduling. The dual-timeline core implements the parallel processing of the immediate priority response and long-term coverage optimization. The short-term planning module optimizes observation sequences within high-priority clusters while considering satellite attitude constraints and electrical power limitations. Consider the current satellite state
, where
and
represent the roll and pitch angles, respectively. Let subscript nav denote the navigation-related variables for satellite maneuver characteristics. The short-term optimization objective function
is formulated as
where
H is the planning horizon,
is a temporal discount factor, and
is a maneuverability weight function that evaluates observation efficiency considering the current satellite state:
The maneuver characteristics are quantified through
subject to operational constraints:
where
represents the minimum duration required for complete target observation.
The long-term planning module coordinates cluster transitions and temporal–spatial resource allocation to maximize overall mission effectiveness. Let subscript c denote cluster-related variables, and let C represent the total number of clusters. The long-term objective function
is formulated as
where
is a dynamic quality function that evaluates cluster observability:
The components represent cluster accessibility
, compactness measure
, and power efficiency factor
. The power efficiency factor is defined as the ratio of the expected observation value to the required electrical power consumption:
where
estimates the total power requirement for observing cluster
c at time
t, considering both the attitude maneuver and payload operation power consumption.
The temporal–spatial allocation among clusters follows
where
represents the allocated observation time for cluster
c, and
is the total available time within the current planning horizon.
We propose an adaptive coordination framework that efficiently bridges short-term and long-term planning processes while maintaining computational tractability. The system state is evaluated through a weighted performance metric:
where
represents the adaptive weights for the priority (
p), energy (
e), and visibility (
v) metrics, with
. The performance metrics are defined as
The weight adaptation follows a gradient-based update rule:
where
denotes projection onto the probability simplex to ensure
, and
is a composite loss function incorporating multiple planning objectives.
This coordination mechanism features several innovations that distinguish it from traditional approaches. First, the state evaluation function enables dynamic mode switching based on a comprehensive mission status assessment rather than relying on fixed scheduling rules. Second, the adaptive weight update process allows the system to learn from execution feedback and adjust its behavior accordingly. Third, the integration of energy efficiency and visibility opportunities in the coordination mechanism ensures sustainable operation while maximizing observation opportunities.
3.3. Complexity Analysis and Optimization
The computational complexity of our framework arises from three primary components. For each component, we develop targeted optimization strategies that significantly reduce the computational overhead while maintaining solution quality.
3.3.1. Core Components Analysis
(1) Clustering Process: The base implementation requires
operations for distance calculations among
n targets, where
n represents the total number of observation targets. We introduce a spatial indexing structure that reduces this complexity through hierarchical partitioning:
where
denotes the total computational operations for cluster formation, and
i represents the hierarchical level in the partitioning structure.
(2) State Evaluation: We implement an incremental update mechanism that exploits the temporal locality of state changes:
where
represents the change in the system state at time
t,
denotes the set of metrics requiring updates,
is the weight coefficient for metric
i, and
indicates the change in metric
i at time
t. This mechanism leverages the observation that most satellite maneuvers only affect a small subset of the state metrics.
(3) Path Optimization: We employ a constrained search space defined by maneuverability and energy constraints:
where
represents the reduced search space,
denotes a potential satellite state,
is the current satellite state,
represents the maximum allowable maneuver distance, and
denotes the energy consumption threshold. The function
measures the maneuver distance between states, while
calculates the electrical power consumption for reaching state
. This optimization significantly reduces the effective branching factor in path search, yielding
where
represents the path optimization time complexity,
denotes the size of the reduced search space, and
k is the original search space size.
3.3.2. Theoretical Bounds
To establish the efficiency of our hierarchical state update mechanism, we need to formally bound the expected size of updates required per time step. The following Theorem 1 and its proof (
Appendix A) demonstrate that the number of affected metrics scales logarithmically with the system size, making our approach computationally tractable for large-scale satellite constellations.
Theorem 1. The expected size of the update set is logarithmically bounded:where c is a system-dependent constant, and m is the number of clusters. 3.3.3. Overall Performance Guarantee
We establish a rigorous complexity–quality trade-off for our proposed framework. The following proposition formally characterizes the performance guarantees of our algorithm:
Proposition 1 (Complexity–Quality Trade-Off). For a given accuracy threshold and confidence parameter , our framework provides probabilistic approximation guarantees with logarithmic computational complexity. Specifically, the algorithm generates solutions that are within a factor of the optimal value, with a probability of at least .
The total computational complexity is bounded bywhere n and m represent the problem-specific parameters characterized in the previous sections. The significance of Proposition 1 lies in its ability to provide near-optimal solutions with provable probabilistic guarantees (the full proof of this is provided in
Appendix B). By controlling the accuracy threshold
and confidence parameter
, our framework offers a flexible approach to balancing computational efficiency and solution quality.
This optimization framework enables real-time implementation while providing theoretical guarantees on both computational efficiency and solution quality.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}