
Preliminary Aircraft Design for Hybrid Electric Propulsion Architectures: A Focus on Critical Loss of Thrust



Abstract
1. Introduction
- How can a meaningful power loading be determined for hybrid electric propulsion architectures with two energy carriers?
- What is the effect of a failure during cruise on the aircraft, especially the energy requirement of the secondary energy carrier?
2. Fundamentals and State of the Art
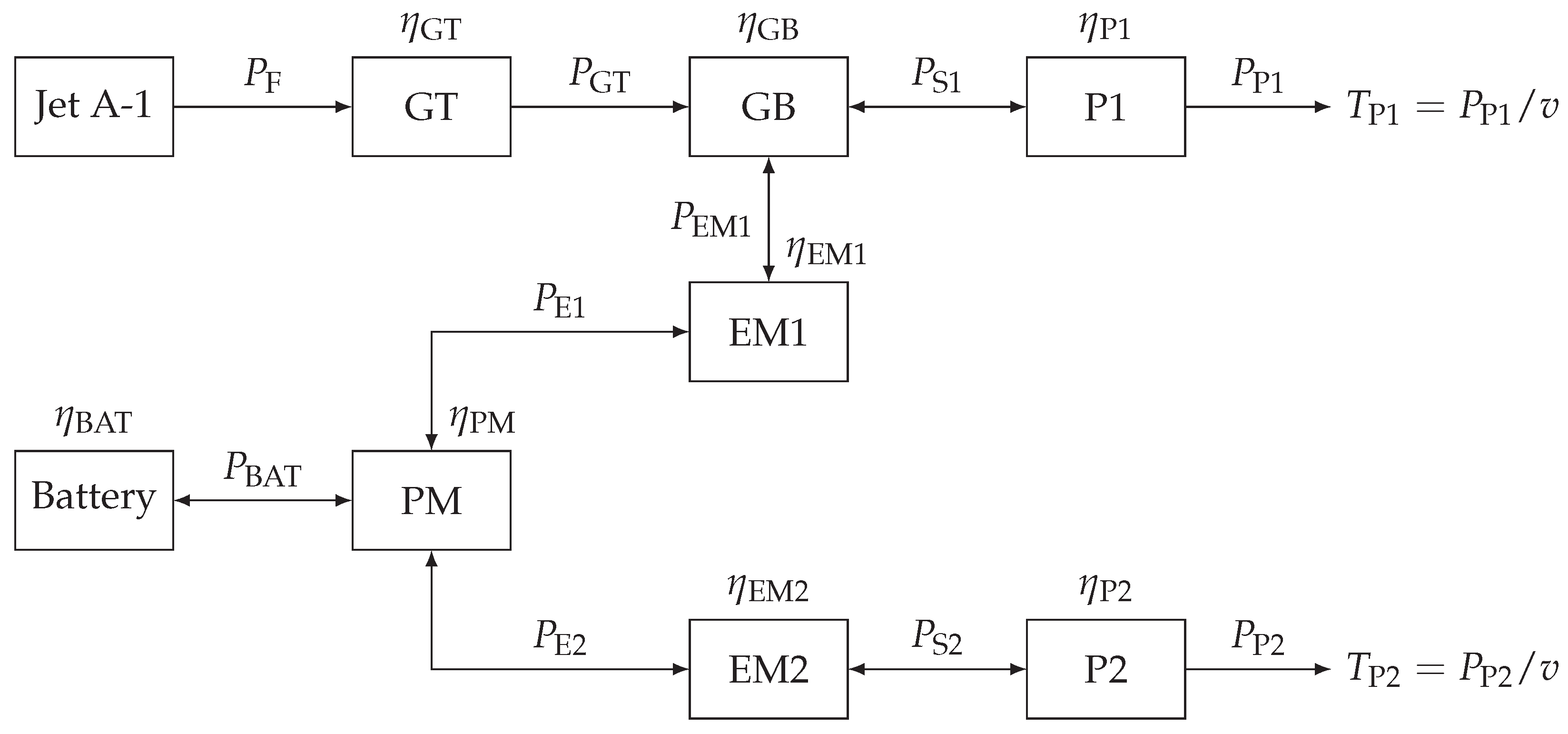
2.1. Hybrid Electric Propulsion Architectures
2.2. Mission Analysis: An Energy Perspective
2.2.1. Energy Management Strategy
2.2.2. Operational Regulations
2.3. Influences and Parameters in Required Power Analysis
2.3.1. Mission Influences: A Power Perspective
2.3.2. Redundancy and Failures
2.4. Conclusion and Identification of Research Gaps
3. Methodology
3.1. Analytical Constraint Analysis
3.1.1. Failure Consideration
3.1.2. Energy Management Strategy Consideration
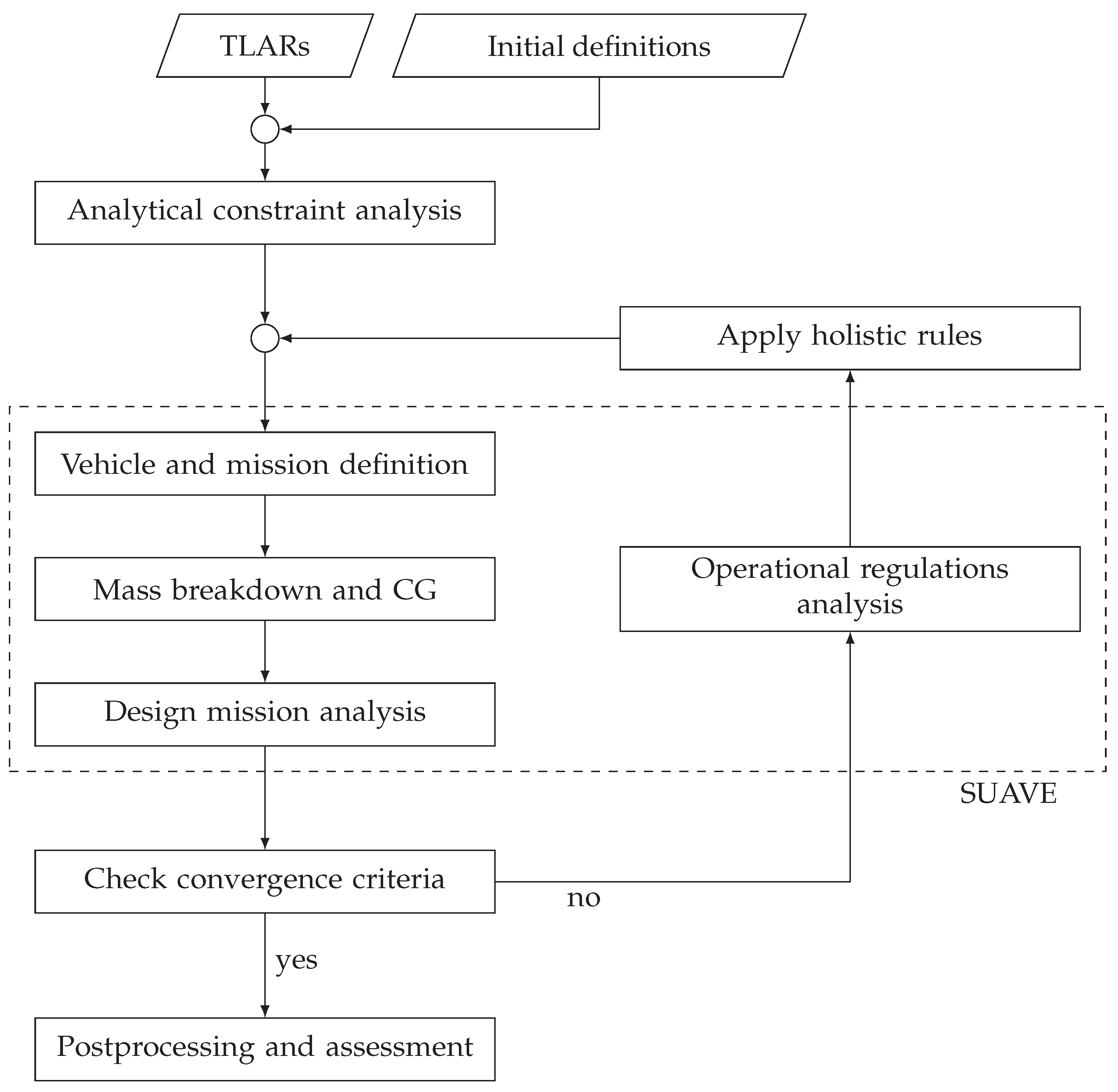
3.2. Numerical Analysis: Workflow with Enhanced SUAVE
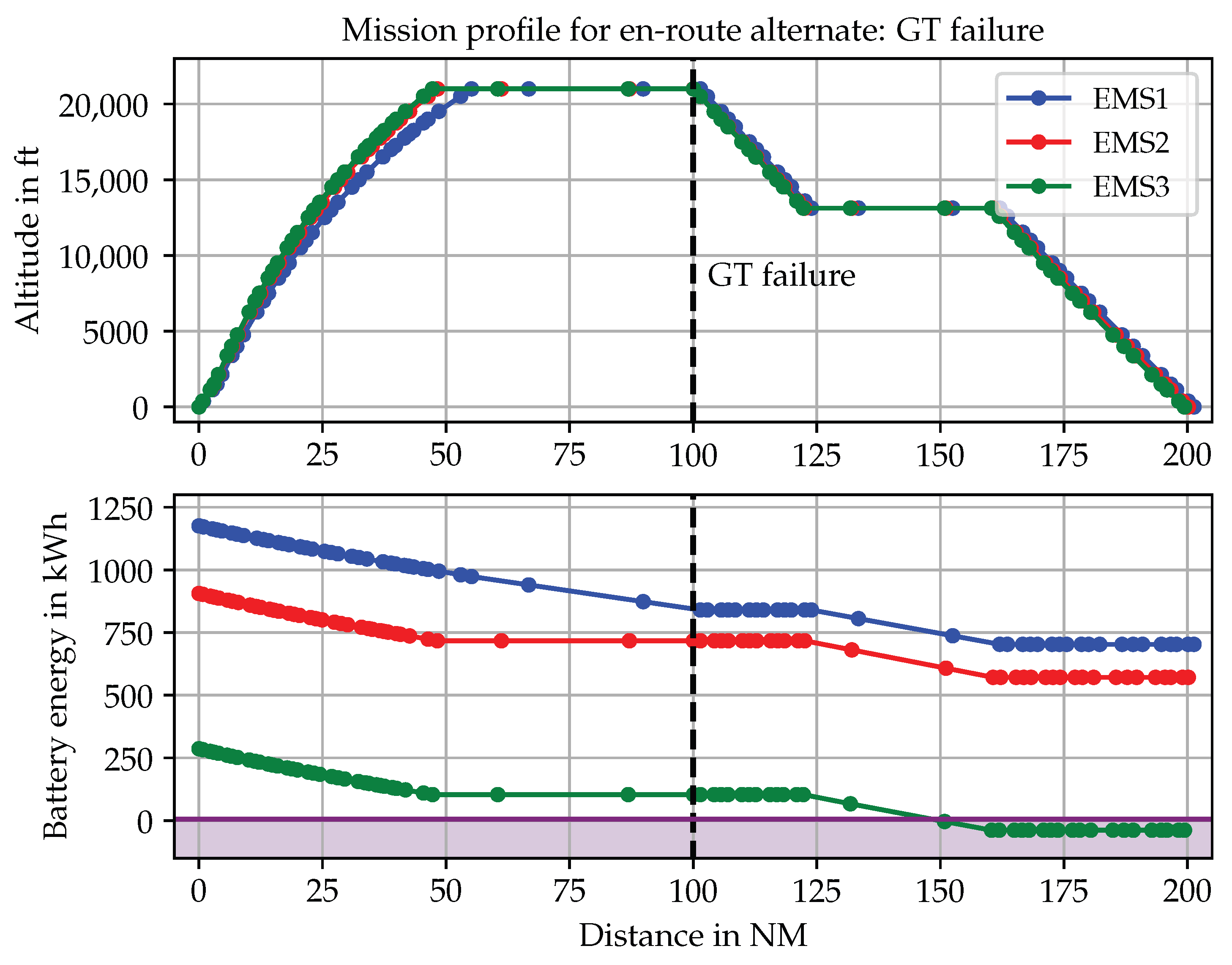
- EMS1: The secondary electric motor (EM2) is powered by the battery in all flight segments except during descent.
- EMS2: EM2 is powered by the battery in all flight segments except during cruise and descent.
- EMS3: EM2 is powered by the battery only in the climb and reserve climb segments.
3.2.1. Propulsion Architecture Adaptions for Failure Implementation
3.2.2. Operational Regulations Analysis
- Climb, AEO: constant calibrated airspeed, constant throttle to cruise altitude
- Cruise, AEO: constant true airspeed, constant altitude until 100 NM distance
- Failure, i.e., CLOT
- Descent/drift down, CLOT: constant calibrated airspeed, constant throttle (idle) to ceiling CLOT altitude
- Cruise, CLOT: constant true airspeed, constant altitude
- Descent, CLOT: constant calibrated airspeed, constant throttle (idle)
- Landing, CLOT: constant true airspeed, constant angle, reaching a total distance of 200 NM
4. Results
4.1. Evaluating Power Requirements and Redundancy Under Failure Conditions
4.2. Impact of Operational Regulations on Energy: En-Route Alternate with CLOT Ceiling
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | ||
| AEO | All Engines Operating | |
| CLOT | Critical Loss of Thrust | |
| EMS | Energy Management Strategy | |
| ERA | En-Route Alternate | |
| ISA | International Standard Atmosphere | |
| MTOM | Maximum Take-Off Mass | |
| OEI | One-Engine-Inoperative | |
| SAF | Sustainable Aviation Fuel | |
| SLS | Sea-Level Static | |
| SoC | State of Charge | |
| SPPH | Serial-Parallel Partial-Hybrid | |
| TLARs | Top-Level Aircraft Requirements | |
| Symbols | ||
| Power lapse ratio | - | |
| Mass ratio | - | |
| Efficiency | - | |
| Supplied power ratio | - | |
| Power split | - | |
| Supplied shaft power ratio | - | |
| Distribution ratio | - | |
| Throttle | - | |
| E | Energy | |
| f | Factor | - |
| g | Gravitational acceleration constant | |
| H | Hybridization factor | - |
| m | Mass | |
| Wing loading | ||
| n | Number | - |
| Power loading | ||
| P | Power | |
| T | Thrust | |
| v | Velocity | |
| L/D | Lift-to-drag ratio | - |
| Subscripts | ||
| BAT | Battery | |
| conv | Conventional | |
| E | Energy | |
| E1 | Primary electric | |
| E2 | Secondary electric | |
| EM1 | Primary electric motor | |
| EM2 | Secondary electric motor | |
| eng | Engine | |
| F | Fuel | |
| GB | Gear box | |
| GT | Gas turbine | |
| i | Constraint | |
| j | Type of power source | |
| k | Source with a failure | |
| OS | Over sizing | |
| P | Power | |
| P1 | Primary propeller | |
| P2 | Secondary propeller | |
| PM | Power management | |
| S | Shaft | |
| S1 | Primary shaft | |
| S2 | Secondary shaft | |
| sup | Supplied | |
| v | Vertical |
References
- European Commission and Directorate-General for Research and Innovation. Fly the Green Deal—Europe’s Vision for Sustainable Aviation; Publications Office of the European Union: Luxembourg, 2022. [Google Scholar] [CrossRef]
- European Commission. The European Green Deal COM(2019) 640. Available online: https://eur-lex.europa.eu/resource.html?uri=cellar:b828d165-1c22-11ea-8c1f-01aa75ed71a1.0002.02/DOC_1&format=PDF (accessed on 18 July 2024).
- European Commission. Directorate General for Research and Innovation; European Commission. Directorate General for Mobility and Transport. In Flightpath 2050: Europe’s Vision for Aviation: Maintaining Global Leadership and Serving Society’s Needs; Publications Office: Luxembourg, 2011. [Google Scholar]
- Geiß, I. Sizing of the Series Hybrid-Electric Propulsion System of General Aviation Aircraft. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2020. [Google Scholar]
- Mangold, J.; Brenner, F.; Moebs, N.; Strohmayer, A. Aircraft Design Implications of Alternative Fuels for Future Hybrid-Electric Regional Aircraft Configurations. In Proceedings of the 9th European Conference for Aerospace Sciences, Lille, France, 27 June–1 July 2022. [Google Scholar] [CrossRef]
- Geiß, I.; Voit-Nitschmann, R. Sizing of the Energy Storage System of Hybrid-Electric Aircraft in General Aviation. CEAS Aeronaut. J. 2017, 8, 53–65. [Google Scholar] [CrossRef]
- Hepperle, M. Electric Flight—Potential and Limitations. In Proceedings of the Energy Efficient Technologies and Concepts of Operation, Lisbon, Portugal, 22–24 October 2012. [Google Scholar]
- Air Transport Action Group. Waypoint 2050, Second Edition. 2021. Available online: https://aviationbenefits.org/media/167417/w2050_v2021_27sept_full.pdf (accessed on 8 October 2024).
- Braun-Unkhoff, M.; Riedel, U. Alternative fuels in aviation. CEAS Aeronaut. J. 2014, 6, 83–93. [Google Scholar] [CrossRef]
- Heyne, J.; Rauch, B.; Clercq, P.L.; Colket, M. Sustainable aviation fuel prescreening tools and procedures. Fuel 2021, 290, 120004. [Google Scholar] [CrossRef]
- Moebs, N.; Eisenhut, D.; Windels, E.; van der Pols, J.; Strohmayer, A. Adaptive Initial Sizing Method and Safety Assessment for Hybrid-Electric Regional Aircraft. Aerospace 2022, 9, 150. [Google Scholar] [CrossRef]
- Mangold, J.; Eisenhut, D.; Brenner, F.; Moebs, N.; Strohmayer, A. Preliminary Hybrid-Electric Aircraft Design with Advancements on the Open-Source Tool SUAVE. J. Phys. Conf. Ser. 2023, 2526, 012022. [Google Scholar] [CrossRef]
- de Vries, R.; Brown, M.; Vos, R. Preliminary Sizing Method for Hybrid-Electric Distributed-Propulsion Aircraft. J. Aircr. 2019, 56, 2172–2188. [Google Scholar] [CrossRef]
- Bovet, L. Conceptual design optimization of Hybrid-Electric Regional Aircraft using SPPH architecture. In Proceedings of the Aerospace Europe Conference -EUCASS-CEAS-2023, Lausanne, Switzerland, 9–13 July 2023. [Google Scholar] [CrossRef]
- Kuśmierek, A.; Galiński, C.; Stalewski, W. Review of the hybrid gas - electric aircraft propulsion systems versus alternative systems. Prog. Aerosp. Sci. 2023, 141, 100925. [Google Scholar] [CrossRef]
- Brelje, B.J.; Martins, J.R. Electric, hybrid, and turboelectric fixed-wing aircraft: A review of concepts, models, and design approaches. Prog. Aerosp. Sci. 2019, 104, 1–19. [Google Scholar] [CrossRef]
- Isikveren, A.; Kaiser, S.; Pornet, C.; Vratny, P. Pre-design strategies and sizing techniques for dual-energy aircraft. Aircr. Eng. Aerosp. Technol. 2014, 86, 525–542. [Google Scholar] [CrossRef]
- Finger, D.F.; Braun, C.; Bil, C. An Initial Sizing Methodology for Hybrid-Electric Light Aircraft. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Finger, D.F.; de Vries, R.; Vos, R.; Braun, C.; Bil, C. A Comparison of Hybrid-Electric Aircraft Sizing Methods. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020. [Google Scholar] [CrossRef]
- Raymer, D. Aircraft Design: A Conceptual Approach, 6th ed.; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Gudmundsson, S. General Aviation Aircraft Design; Elsevier Science & Technology: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Roskam, J. Airplane Design Part I–VIII; Design Analysis & Research: Lawrence, KS, USA, 1985. [Google Scholar]
- Nam, T.; Soban, D.; Mavris, D. Power Based Sizing Method for Aircraft Consuming Unconventional Energy. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005. [Google Scholar] [CrossRef]
- de Vries, R.; Hoogreef, M.F.M.; Vos, R. Range Equation for Hybrid-Electric Aircraft with Constant Power Split. J. Aircr. 2020, 57, 552–557. [Google Scholar] [CrossRef]
- Joksimović, A.; Carbonneau, X.; Crabé, C.; Benichou, E. Generalised Methodology for Sizing of Air Vehicles with Hybrid-Electric Propulsion. In Proceedings of the STO-MP-AVT-323, Trondheim, Norway, 7–11 October 2019. [Google Scholar]
- Torenbeek, E. Synthesis of Subsonic Airplane Design; Springer: Dordrecht, The Netherlands, 1982. [Google Scholar] [CrossRef]
- MacDonald, T.; Clarke, M.; Botero, E.M.; Vegh, J.M.; Alonso, J.J. SUAVE: An Open-Source Environment Enabling Multi-Fidelity Vehicle Optimization. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2017. [Google Scholar] [CrossRef]
- Botero, E.M.; Wendorff, A.; MacDonald, T.; Variyar, A.; Vegh, J.M.; Lukaczyk, T.W.; Alonso, J.J.; Orra, T.H.; Ilario da Silva, C. SUAVE: An Open-Source Environment for Conceptual Vehicle Design and Optimization. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2016. [Google Scholar] [CrossRef]
- Karpuk, S.; Mosca, V.; Liu, C.; Elham, A. Development of a Multi-fidelity Design, Analysis, and Optimization Environment for Future Transport Aircraft. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar] [CrossRef]
- Ma, Y.; Karpuk, S.; Elham, A. Conceptual design and comparative study of strut-braced wing and twin-fuselage aircraft configurations with ultra-high aspect ratio wings. Aerosp. Sci. Technol. 2022, 121, 107395. [Google Scholar] [CrossRef]
- Chuck, C.J.; Donnelly, J. The compatibility of potential bioderived fuels with Jet A-1 aviation kerosene. Appl. Energy 2014, 118, 83–91. [Google Scholar] [CrossRef]
- Coordinating Research Council. Handbook of Aviation Fuel Properties; CRC Report No. 530; Coordinating Research Council: Atlanta, GA, USA, 1983. [Google Scholar]
- Budde-Meiwes, H.; Drillkens, J.; Lunz, B.; Muennix, J.; Rothgang, S.; Kowal, J.; Sauer, D.U. A review of current automotive battery technology and future prospects. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 761–776. [Google Scholar] [CrossRef]
- Farhad, S.; Nazari, A. Introducing the energy efficiency map of lithium-ion batteries. Int. J. Energy Res. 2018, 43, 931–944. [Google Scholar] [CrossRef]
- Saxon, A.; Yang, C.; Santhanagopalan, S.; Keyser, M.; Colclasure, A. Li-Ion Battery Thermal Characterization for Thermal Management Design. Batteries 2024, 10, 136. [Google Scholar] [CrossRef]
- Anker, M.A.; Hartmann, C.; Nøland, J.K. Feasibility of Battery-Powered Propulsion Systems for All-Electric Short-Haul Commuter Aircraft. IEEE Access. 2025, 13, 32260–32275. [Google Scholar] [CrossRef]
- Hu, J.; Booker, J. Preliminary Sizing of Electric-Propulsion Powertrains for Concept Aircraft Designs. Designs 2022, 6, 94. [Google Scholar] [CrossRef]
- Quillet, D.; Boulanger, V.; Rancourt, D.; Freer, R.; Bertrand, P. Parallel Hybrid-Electric Powertrain Sizing on Regional Turboprop Aircraft with Consideration for Certification Performance Requirements. In Proceedings of the AIAA AVIATION 2021 FORUM, Virtual, 2–6 August 2021; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar] [CrossRef]
- Hoelzen, J.; Liu, Y.; Bensmann, B.; Winnefeld, C.; Elham, A.; Friedrichs, J.; Hanke-Rauschenbach, R. Conceptual Design of Operation Strategies for Hybrid Electric Aircraft. Energies 2018, 11, 217. [Google Scholar] [CrossRef]
- de Vries, R. Hybrid-Electric Aircraft with Over-the-Wing Distributed Propulsion: Aerodynamic Performance and Conceptual Design. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2022. [Google Scholar]
- Pinto Leite, J.P.S.; Voskuijl, M. Optimal energy management for hybrid-electric aircraft. Aircr. Eng. Aerosp. Technol. 2020, 92, 851–861. [Google Scholar] [CrossRef]
- Quillet, D.; Boulanger, V.; Rancourt, D. Off-Design Performance Analysis of a Parallel Hybrid Electric Regional Turboprop Aircraft. J. Aircr. 2023, 60, 1728–1738. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency. Easy Access Rules for Air Operations (Regulation (EU) No 965/2012) Revision 21, September 2023, 2023. Available online: https://www.easa.europa.eu/en/document-library/easy-access-rules/easy-access-rules-air-operations-regulation-eu-no-9652012 (accessed on 18 July 2024).
- Jackson, P. (Ed.) Jane’s All the World’s Aircraft: Development & Production 2017–2018; IHS Global Limited: London, UK, 2017. [Google Scholar]
- Quillet, D.; Boulanger, V.; Rancourt, D.; Freer, R.; Bertrand, P. Impact of OEI requirement on parallel hybrid electric turboprop regional aircraft optimization. Aircr. Eng. Aerosp. Technol. 2022, 95, 276–283. [Google Scholar] [CrossRef]
- Boggero, L.; Fioriti, M.; Corpino, S. Development of a new conceptual design methodology for parallel hybrid aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 233, 1047–1058. [Google Scholar] [CrossRef]
- Finger, D.F.; Braun, C.; Bil, C. Impact of Engine Failure Constraints on the Initial Sizing of Hybrid-Electric GA Aircraft. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2019. [Google Scholar] [CrossRef]
- Loftin, L. Subsonic aircraft: Evolution and the matching of size to performance. In National Aeronauticsand Space Administration, Reference Publication 1060; NASA: Hampton, VA, USA, 1980. [Google Scholar]
- Mattingly, J.D.; Heiser, W.H.; Pratt, D.T. Aircraft Engine Design, 2nd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2002. [Google Scholar] [CrossRef]
- European Aviation Safety Agency. Certification Specifications and Acceptable Means of Compliance for Large Aeroplanes (CS-25), Amendment 28; European Aviation Safety Agency: Cologne, Germany, 2023.
- Nam, T.; Soban, D.; Mavris, D. A Generalized Aircraft Sizing Method and Application to Electric Aircraft. In Proceedings of the 3rd International Energy Conversion Engineering Conference, San Francisco, CA, USA, 15–18 August 2005; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005. [Google Scholar] [CrossRef]
- Finger, D.F.; Bil, C.; Braun, C. Initial Sizing Methodology for Hybrid-Electric General Aviation Aircraft. J. Aircr. 2019, 57, 245–255. [Google Scholar] [CrossRef]
- Finger, D.F.; de Vries, R.; Vos, R.; Braun, C.; Bil, C. Cross-Validation of Hybrid-Electric Aircraft Sizing Methods. J. Aircr. 2022, 59, 742–760. [Google Scholar] [CrossRef]
- de Vries, R.; Brown, M.T.; Vos, R. A Preliminary Sizing Method for Hybrid-Electric Aircraft Including Aero-Propulsive Interaction Effects. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Finger, D.F.; Götten, F.; Braun, C.; Bil, C. Mass, primary energy, and cost: The impact of optimization objectives on the initial sizing of hybrid-electric general aviation aircraft. CEAS Aeronaut. J. 2020, 11, 713–730. [Google Scholar] [CrossRef]
- European Aviation Safety Agency. Certification Specifications for Normal-Category Aeroplanes (CS-23) and Acceptable Means of Compliance and Guidance Material to the Certification Specifications for Normal-CategoryAeroplanes (AMC & GM to CS-23), CS-23 Amendment 6/AMC & GM to CS-23 Issue 4; European Aviation Safety Agency: Cologne, Germany, 2023.
- Sgueglia, A.; Schmollgruber, P.; Bartoli, N.; Benard, E.; Morlier, J.; Jasa, J.; Martins, J.R.R.A.; Hwang, J.T.; Gray, J.S. Multidisciplinary Design Optimization Framework with Coupled Derivative Computation for Hybrid Aircraft. J. Aircr. 2020, 57, 715–729. [Google Scholar] [CrossRef]
- Steiner, H.J.; Vratny, P.C.; Gologan, C.; Wieczorek, K.; Isikveren, A.T.; Hornung, M. Optimum number of engines for transport aircraft employing electrically powered distributed propulsion. CEAS Aeronaut. J. 2014, 5, 157–170. [Google Scholar] [CrossRef]
- Marciello, V.; Orefice, F.; Nicolosi, F.; Ciliberti, D.; Della Vecchia, P. Design of hybrid-electric aircraft with fault-tolerance considerations. Chin. J. Aeronaut. 2023, 36, 160–178. [Google Scholar] [CrossRef]
- Zamboni, J. A method for the Conceptual Design of Hybrid Electric Aircraft. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Zamboni, J.; Vos, R.; Emeneth, M.; Schneegans, A. A Method for the Conceptual Design of Hybrid Electric Aircraft. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2019. [Google Scholar] [CrossRef]
- Beyers, I.; Bensmann, A.; Hanke-Rauschenbach, R. Ragone plots revisited: A review of methodology and application across energy storage technologies. J. Energy Storage 2023, 73. [Google Scholar] [CrossRef]
- Avions de Transport Regional. ATR 42-500 Flight Crew Operating Manual; ATR: Blagnac, France, 1998. [Google Scholar]
- Eisenhut, D.; Mangold, J.; Moebs, N.; Brenner, F.; Strohmayer, A. Case study on hybrid-electric aircraft designs enabled by an enhanced SUAVE version. J. Physics Conf. Ser. 2023, 2526, 012019. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Segment/ Throttle of | Climb | Cruise | Descent | Reserve Climb | Reserve Cruise |
|---|---|---|---|---|---|
| GT | 0.9 | unknown | idle | 0.9 | unknown |
| EM1 | 0 | 0 | 0 | 0 | 0 |
| EM2 | 1 | 1 | 0 | 1 | 1 |
| EMS | MTOM in kg | Design Fuel in kg | Trip Fuel in kg | Battery Mass in kg |
|---|---|---|---|---|
| 1 | 19,104 | 677 | 322 | 1391 |
| 2 | 18,998 | 749 | 391 | 1118 |
| 3 | 18,157 | 840 | 380 | 415 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mangold, J.; Strohmayer, A. Preliminary Aircraft Design for Hybrid Electric Propulsion Architectures: A Focus on Critical Loss of Thrust. Aerospace 2025, 12, 275. https://doi.org/10.3390/aerospace12040275
Mangold J, Strohmayer A. Preliminary Aircraft Design for Hybrid Electric Propulsion Architectures: A Focus on Critical Loss of Thrust. Aerospace. 2025; 12(4):275. https://doi.org/10.3390/aerospace12040275
Chicago/Turabian StyleMangold, Jonas, and Andreas Strohmayer. 2025. "Preliminary Aircraft Design for Hybrid Electric Propulsion Architectures: A Focus on Critical Loss of Thrust" Aerospace 12, no. 4: 275. https://doi.org/10.3390/aerospace12040275
APA StyleMangold, J., & Strohmayer, A. (2025). Preliminary Aircraft Design for Hybrid Electric Propulsion Architectures: A Focus on Critical Loss of Thrust. Aerospace, 12(4), 275. https://doi.org/10.3390/aerospace12040275