
Scalability of eVTOL Systems: Insights from Multi-Pad Configurations and CPN Analysis



Abstract
1. Introduction
- Identifying bottlenecks in vertiport landing operations and scheduling.
- Investigating the effects of common expansions in vertiports, such as adding routes and pads, and their impact on the bottlenecks.
- Evaluating the impact of operational parameters, such as increased horizontal speed, on overall performance.
2. Materials and Methods
2.1. Petri Nets
2.2. Modeling Vertiport Operations with Colored Petri Nets
3. Vertiport Operations Model
3.1. Airspace Design and Operational Framework
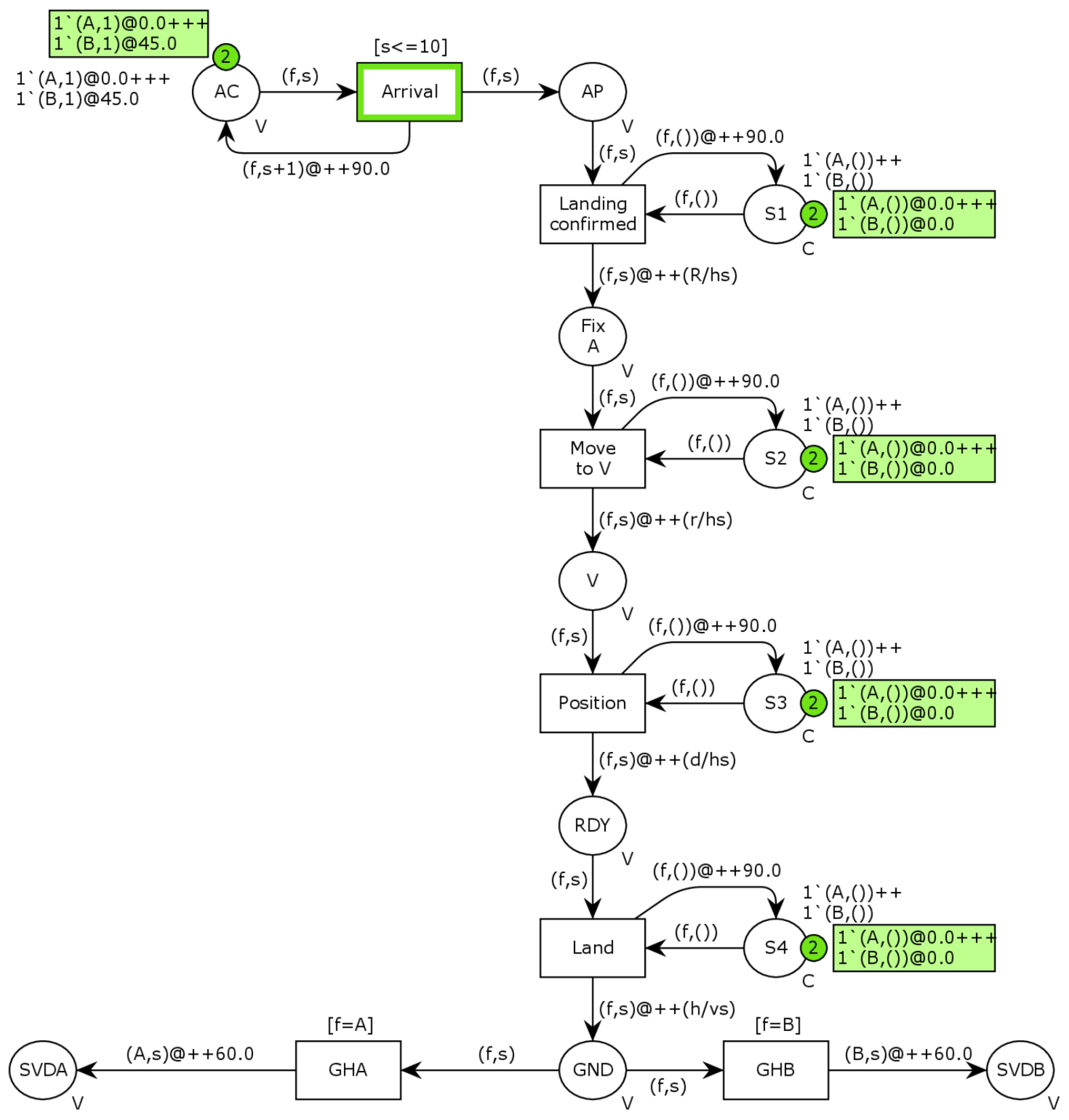
3.2. Pet Net Representation of the Operational Framework
3.3. Stochastic Arrivals Generation Using PDF and CDF
3.4. Integration of Arrival Data and Simulation in CPN
4. Simulation Experiments
4.1. Overview of Simulation Experiments
- Incremental Increase of Routes and Pads
- 2.
- Effect of Increased Pads with Fixed Routes
- 3.
- Combined Scalability of Routes and Pads
- 4.
- Impact of Horizontal Speed
4.2. Experiment 1: Incremental Increase of Routes and Pads
4.3. Experiment 2: Effect of Increased Pads with Fixed Routes
4.4. Experiment 3: Combined Scalability of Routes and Pads
4.5. Experiment 4: Impact of Horizontal Speed
5. Discussion
5.1. Summary of Findings
5.2. Areas of Future Research
6. Conclusions
- The “Landing Confirmed—Move to V” stage consistently emerges as a bottleneck, requiring targeted interventions.
- Key operational parameters, including horizontal distance (R) and horizontal speed (hs), play a key role in the landing procedure; optimizing the landing operation should include or at least consider these parameters.
- Implementing probability density functions (PDFs) and cumulative distribution functions (CDFs) combined with Petri nets provides a robust framework for analyzing eVTOL traffic dynamics.
- The study confirms that scaling from 1R1P to 6R6P configurations is feasible, demonstrating the viability of eVTOL systems for high-demand urban settings.
- Infrastructure expansion should be complemented by intelligent traffic management, dynamic scheduling, and operational refinements to maintain efficiency as eVTOL adoption grows.
- Expanding routes and landing pads together drastically reduces congestion and waiting times, reinforcing the importance of holistic infrastructure planning.
- Simply increasing the number of landing pads does not significantly improve throughput unless paired with better traffic control and optimized movement strategies.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiang, S.; Xie, A.; Ye, M.; Yan, X.; Han, X.; Niu, H.; Li, Q.; Huang, H. Autonomous eVTOL: A summary of researches and challenges. Green Energy Intell. Transp. 2024, 3, 100140. [Google Scholar] [CrossRef]
- Lineberger, R.; Hussain, A.; Rutgers, V. Change is in the Air: The Elevated Future of Mobility—What’s Next on the Horizon. Deloitte Insights, 2019. Available online: https://www2.deloitte.com/content/dam/Deloitte/us/Documents/energy-resources/di-the-elevated-future-of-mobility.pdf (accessed on 15 October 2024).
- Wild, G. Urban Aviation: The Future Aerospace Transportation System for Intercity and Intracity Mobility. Urban Sci. 2024, 8, 218. [Google Scholar] [CrossRef]
- Saxena, R.; Prabhakar, T.; Kuri, J.; Yadav, M. Vertiport Terminal Scheduling and Throughput Analysis for Multiple Surface Directions. arXiv 2024, arXiv:2408.01152. [Google Scholar] [CrossRef]
- Song, K. Optimal Vertiport Airspace and Approach Control Strategy for Urban Air Mobility (UAM). Sustainability 2023, 15, 437. [Google Scholar] [CrossRef]
- Ugwueze, O.; Statheros, T.; Bromfield, M.; Horri, N. Trends in eVTOL Aircraft Development: The Concepts, Enablers and Challenges. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. AIAA Conference Paper. [Google Scholar] [CrossRef]
- Wu, H. Modeling Next Generation Air Traffic Control System with Petri Net. Master’s Thesis, New Jersey Institute of Technology, Newark, NJ, USA, 2011. [Google Scholar]
- Sng, Z.; Hansman, R. A Petri Net Framework for the Representation and Analysis of Aircraft Turnaround Operations; Report No. ICAT-2019-05; MIT International Center for Air Transportation: Cambridge, MA, USA, 2019. [Google Scholar]
- Littorin, H. The Future of Electric Aircraft and eVTOLs; Berg Insight: Gothenburg, Sweden, 2022. [Google Scholar]
- Di Mascio, P.; Celesti, M.; Sabatini, M.; Moretti, L. Fast-Time Simulations to Study the Capacity of a Traffic Network Aimed at Urban Air Mobility. Future Transp. 2024, 4, 1370–1387. [Google Scholar] [CrossRef]
- Petri, C. Kommunikation mit Automaten; Fakultät für Mathematik und Physik der Technischen Hochschule Darmstadt: Bonn, Germany, 1962. [Google Scholar]
- Szpyrka, M. Petri Nets in Modeling and Analysis of Concurrent Systems; WNT: Warszawa, Poland, 2008. (In Polish) [Google Scholar]
- Jensen, K.; Kristensen, L.; Wells, L. Coloured Petri Nets and CPN Tools for Modelling and Validation of Concurrent Systems. Int. J. Softw. Tools Technol. Transf. 2007, 9, 213–254. [Google Scholar] [CrossRef]
- Reisig, W. Understanding Petri Nets. Modeling Techniques, Analysis Methods, Case Studies; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Skorupski, J. Quantitative Methods of Air Traffic Incidents Analysis; Warsaw University of Technology Publishing House: Warszawa, Poland, 2018. (In Polish) [Google Scholar]
- Zaitsev, D.; Shmeleva, T. Modeling with Colored Petri Nets: Specification, Verification, and Performance Evaluation of Systems; IGI Global: Hershey, PA, USA, 2019. [Google Scholar]
- Kleinbekman, I.; Mitici, M.; Wei, P. Rolling-horizon electric vertical takeoff and landing arrival scheduling for on-demand urban air mobility. J. Aerosp. Inf. Syst. 2020, 17, 150–159. [Google Scholar] [CrossRef]
- Goodrich, K.; Barmore, B. Exploratory Analysis of the Airspace Throughput and Sensitivities of an Urban Air Mobility System. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3364. [Google Scholar]
- Bacchini, A.; Cestino, E. Electric VTOL Configurations Comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Fedorova, A.; Beliautsou, V.; Zimmermann, A. Colored Petri Net Modelling and Evaluation of Drone Inspection Methods for Distribution Networks. Sensors 2022, 22, 3418. [Google Scholar] [CrossRef] [PubMed]
- Skorupski, J.; Florowski, A. Method for evaluation the landing aircraft sequence under disturbed conditions with the use of Petri Nets. Aeronaut. J. 2016, 120, 819–844. [Google Scholar] [CrossRef]
- Jayaprakash, O.; Gunasekaran, K.; Chandrasekaran, G.; Muralidharan, S. Probability Density Functions for Vessel Arrivals Served at Multicommodity Ports. Int. J. Pure Appl. Math. 2018, 118, 1–15. [Google Scholar]
- Chakravarthy, S.; Rao, B. Queuing-Inventory Models with MAP Demands and Random Replenishment Opportunities. Mathematics 2021, 9, 1092. [Google Scholar] [CrossRef]
- Sanglas, J.; Trinchero, P.; Painter, S.; Cvetkovic, V.; Poteri, A.; Selroos, J.; Zou, L. Significance of Low-Velocity Zones on Solute Retention in Rough Fractures. Water Resour. Res. 2024, 60, e2023WR036221. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| Start Point | End Point | Step of Landing | Description |
|---|---|---|---|
| AP | Fix A | Arrival—Landing Confirmed | Arrival of the eVTOL at the vertiport airspace and reception of landing confirmation. |
| Fix A | V | Landing Confirmed—Move to V | Approach of the eVTOL, traveling a distance to arrive at a designated fixed point. |
| V | RDY | Move to V—Position | Horizontal approach of the eVTOL, traveling a distance to reach the position for final vertical descent. |
| RDY | Ground | Position—Land | Vertical descent of the eVTOL to the designated touchdown point. |
| - | - | Land—GHA | The eVTOL is officially considered landed, and ground handling operations commence. |
| GHA—GHA Done | Execution of ground handling operations on the eVTOL. | ||
| - | - | Arrival—Landing Confirmed | Completion of all ground handling operations, marking the readiness of the eVTOL for the next operation cycle. |
| Experiment | Number of Routes (R) | Number of Landing Pads (P) | Horizontal Speed (hs) | Arrival Schedule | Other Constraints | Key Metrics Analyzed |
|---|---|---|---|---|---|---|
| Exp. 1: Incremental increase of routes and pads | 1 → 6 | 1 → 6 | Fixed | Adjusted based on max arrival capacity of each configuration using CDF and PDF method | Separation time: 90 s No weather effects | Throughput, queueing, delay factors, the impact of pad count on queuing |
| Exp. 2: Increased pads with fixed routes | 1 | 1 → 4 | Fixed | Fixed—identified schedule for 1R1P from the first experiments | Same as Exp. 1 | Impact of pad count on queuing, time per stage |
| Exp. 3: Combined scalability of routes and pads | 1 → 6 | 1 → 6 | Fixed | Fixed | Same as Exp. 1 | Throughput, time efficiency, scalability |
| Exp. 4: Impact of horizontal speed | 1 | 1 | +10% increase compared to the initial setup | Fixed | Same as Exp. 1 | Bottleneck reduction, time savings |
| Setup | Arrival— Landing Confirmed [s] | Landing Confirmed— Move to V [s] | Move to V— Position [s] | Position— Land [s] | Land— GHA [s] | GHA— GHA Done [s] | Number of Arrivals (24 h) |
|---|---|---|---|---|---|---|---|
| 1R1P | 550.63 | 593.22 | 67.79 | 22.88 | 68.96 | 30 | 115 |
| 2R2P | 542.50 | 593.22 | 67.79 | 22.88 | 68.96 | 30 | 230 |
| 3R3P | 531.60 | 593.22 | 67.79 | 22.88 | 68.96 | 30 | 349 |
| 4R4P | 546.18 | 593.22 | 67.79 | 22.88 | 68.96 | 30 | 464 |
| 5R5P | 541.77 | 593.22 | 67.79 | 22.88 | 68.96 | 30 | 583 |
| 6R6P | 551.18 | 593.22 | 67.79 | 22.88 | 68.96 | 30 | 699 |
| Setup | Number of Queued Arrivals | Average Arrival to Landing [s] |
|---|---|---|
| 1R1P | 108 | 1333.49 |
| 2R2P | 216 | 1325.37 |
| 3R3P | 319 | 1314.47 |
| 4R4P | 435 | 1329.04 |
| 5R5P | 551 | 1324.64 |
| 6R6P | 662 | 1334.04 |
| Setup | Arrival—Landing Confirmed (s) | Percentage of Not Queued Arrivals |
|---|---|---|
| 1R1P | 550.63 | 6.03 |
| 2R2P | 178.08 | 50.00 |
| 3R3P | 93.15 | 72.81 |
| 4R4P | 69.87 | 80.70 |
| 5R5P | 60.25 | 79.82 |
| 6R6P | 37.47 | 88.60 |
| Setup | Arrival— Landing Confirmed [s] | Landing Confirmed—Move to V [s] | Move to V— Position [s] | Position Land [s] | Land—GHA [s] | GHA—GHA Done [s] |
|---|---|---|---|---|---|---|
| 1R1P | 550.63 | 593.22 | 67.79 | 22.88 | 68.96 | 30 |
| 1R1P + | 485.09 | 539.29 | 61.63 | 20.80 | 68.96 | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qanbari, A.; Skorupski, J. Scalability of eVTOL Systems: Insights from Multi-Pad Configurations and CPN Analysis. Aerospace 2025, 12, 147. https://doi.org/10.3390/aerospace12020147
Qanbari A, Skorupski J. Scalability of eVTOL Systems: Insights from Multi-Pad Configurations and CPN Analysis. Aerospace. 2025; 12(2):147. https://doi.org/10.3390/aerospace12020147
Chicago/Turabian StyleQanbari, Amir, and Jacek Skorupski. 2025. "Scalability of eVTOL Systems: Insights from Multi-Pad Configurations and CPN Analysis" Aerospace 12, no. 2: 147. https://doi.org/10.3390/aerospace12020147
APA StyleQanbari, A., & Skorupski, J. (2025). Scalability of eVTOL Systems: Insights from Multi-Pad Configurations and CPN Analysis. Aerospace, 12(2), 147. https://doi.org/10.3390/aerospace12020147